Изобретение относится к средствам защиты от вибраций различных объектов и может быть использовано для виброзащиты точных приборов
Целью изобретения является расширение диапазона виброзащитного воэдейст- зия.
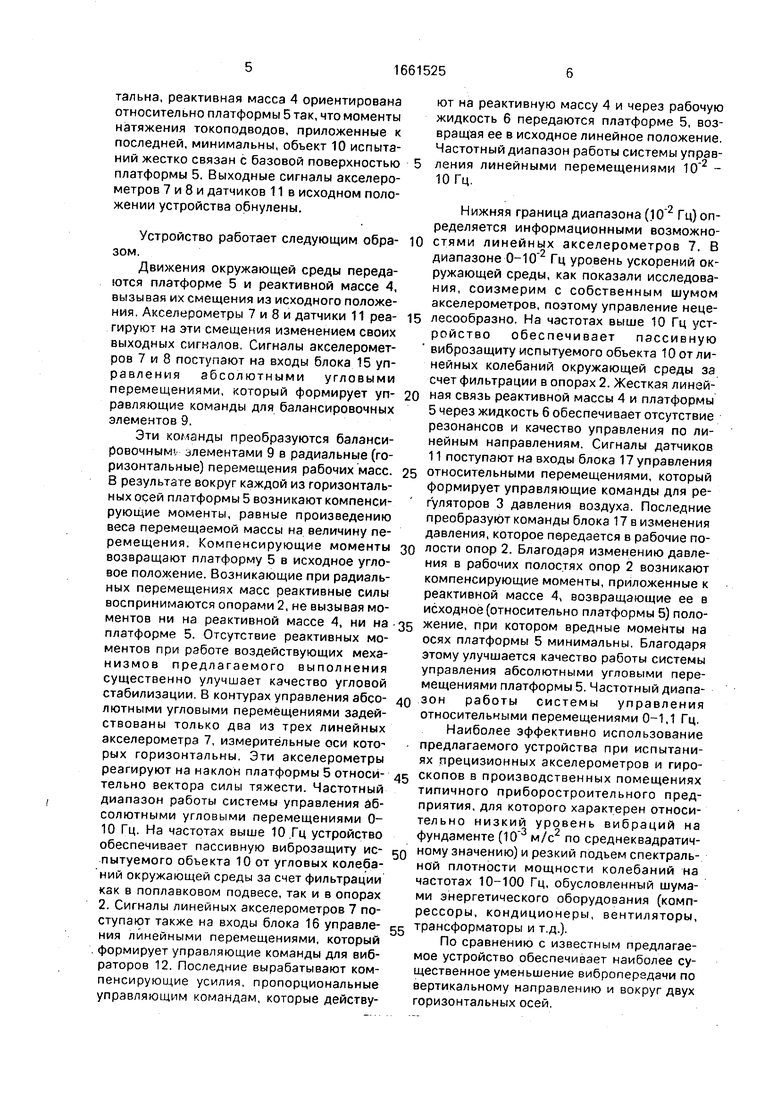
На чертеже представлена схема устройства.
Устройство содержит основание 1, пневматические опоры 2, регуляторы 3 давления воздуха, реактивную массу 4, платформу 5, рабочую жидкость 6, линейные акселерометры 7, угловые акселерометры 8, балансировочные элементы 9, объект 10 испытаний, датчики 11, вибраторы 12, крышку 13, фальшпол 14, блок 15 управления угло- вьйии перемещениями, блок 16 управления линейными перемещениями и блок 17 управления относительными угловыми перемещениями
Основание 1 выполнено в виде массивного и жесткого бетонного короба с четырьмя тумбами, заглубленного в грунт рабочего помещения
На подставках основания установлены пневматические опоры 2, рабочие полости
которых соединены трубопроводами с регуляторами 3 давления воздуха. На опорах 2 смонтирована реактивная масса 4 с внутренней полусферической полостью.
Платформа 5 выполнена с наружной nb- лусферической поверхностью несколько меньшего радиуса и размещена внутри реактивной массы 4. Зазор между полусферическими поверхностями платформы 5 и реактивной массы 4 заполнен рабочей жидкостью б На ужесточающих ребрах и фланцах платформы 5 (не показаны) укреплены линейные 7 и угловые 8 акселерометры и балансировочные элементы 9, а на горизонтальной базовой поверхности - объект 10 испытаний. Между реактивной массой 4 и платформой 5 размещены датчики 11 их относительного перемещения емкостного типа, токоподводы и фиксирующие упругие связи (не показаны).
На подставках основания 1 расположены исполнительные элементы, выполненные в виде электродинамических вибраторов 12, подвижные части которых укреплены на реактивной массе 4 С реактивной массой 4 связана защитная полусферическая крышка 13 В верхней части короб
сл
N3
основания 1 перекрыт фальшполом 14. В состав устройства входят также блок 15 управления абсолютными угловыми перемещениями, блок 16управления абсолютными линейными перемещениями и блок 17 управления относительными угловыми перемещениями. Блок 15 связан выходами с балансировочными элементами 9, а входами - с акселерометрами 7 и 8. Блок 16 связан выходами с вибраторами 12, а входами - с акселерометрами 7, Блок 17 связан выходами с регуляторами 3 давления, а входами - с датчиками 11. Реактивная масса 4 связана с основанием 1 токоподводами (не показаны). Масса основания 1 на порядок больше массы остальных элементов устройства. Момент инерции реактивной массы 4 соизмерим с моментом инерции платформы 5. Удельный вес и количество рабочей жидкости 6 рассчитаны так, чтобы обеспечить плавучесть платформы 5. Толщина слоя и вязкость жидкости 6 выбраны из условия минимума моментов трения на осях платформы 5 и достаточного демпфирования линейных перемещений платформы 5 относительно реактивной массы 4. Центры масс платформы 5 и реактивной массы 4 находятся в геометрическом центре сферы поплавкового подвеса, образованного слоем жидкости 6. В этой же точке находится центр жесткости опор 2. Такое расположение элементов устройства обеспечивает развязку собственных форм движения его основных элементов и облегчает управление. Для регулировки положения центра масс на платформе имеются балансировочные грузы (не показаны). Жесткость пневматических опор 2 подобрана так, чтобы собственные частоты угловых колебаний реактивной массы 4 и платформы 5 были ниже пика спектральной плотности мощности „ промышленных шумов в месте установки устройства. Минимальное количество опор 2 три, однако в целях упрощения системы управления в описываемой реализации устройства имеется четыре опоры 2, симметрично расположенные относительно центра платформы 5. Для заполнения рабочих полостей опор 2 воздухом имеется специальная система питания (не показана). Регуляторы 3 давления воздуха представляют собой устройства, преобразующие электрические команды в изменение давления воздуха. Рабочие полости регулятора 3 сообщаются с рабочими полостями опор 2. Линейных акселерометров 7 в устройстве три, их измерительные оси взаимно ортогональны. Угловых акселерометров 8 в устройстве два, их измерительные оси взаимно ортогональны и горизонтальны. Балансировочных элементов 9 в устройстве два, каждый из них имеет рабочую массу и механизм, преобразующий входные электрические команды в перемещения укдзанной массы в горизонтальном (радиальном) направлении относительно платформы 5. Направления перемещений рабочих масс балансировочных элементов 9 взаимно ортогональны. Четыре емкостных датчика 11
0 расположены на периферии платформы 5 симметрично относительно ее центра. Направление измеряемых перемещений реактивной массы 4 относительно платформы 5 вертикальное. Разности показаний симмет5 рично расположенных датчиков 11 пропорциональны относительным угловым перемещениям реактивной массы 4 относительно платформы 5. Минимальное количество вибраторов 12 в устройстве три, однако
0 по соображениям удобства компоновки и обслуживания использовано восемь вибраторов 12, расположенных вблизи опор 2. Ориентация осей колебаний вибраторов 12 (четыре вертикально и четыре горизонталь5 но) и схема соединения их -управляющих обмоток обеспечивают формирование трех независимых и взаимно ортогональных толкающих усилий, совпадающих с направлениями измерительных осей трех линейных
0 акселерометров 7. Защитная крышка 13 изолирует внутреннюю полость реактивной массы 4 с расположенной в ней платформой 5 от акустических, тепловых и других воздействий окружающей устройство среды.
5 Фальшпол 14 обеспечивает подход персонала, обслуживающего устройства, к крышке 13.
При снятой крышке 13 к аппаратуре, установленной на платформе 5, имеется
0 удобный доступ сверху. Блоком 15 замкнуты два контура системы управления абсолютными угловыми перемещениями платформы 5 вокруг двух взаимно ортогональных горизонтальных осей. В контуры
5 входят акселерометры 7 и 8 и балансировочные элементы 9. Блоком 16 замкнуты три контура системы управления абсолютными линейными перемещениями платформы 5 вдоль трех взаимно ортогональных осей. В
0 контуры входят акселерометры 7 и вибраторы 12. Блоком 17 замкнуты два контура системы управления углрвыми перемещениями реактивной массы 4 относительно платформы 5 вокруг двух взаимно ортогональных
5 г°Ризонтальных осей. В контуры входят датчики 11 относительных перемещений, регуляторы 3 давления воздуха и пневматические опоры 2.
В исходном положении устройства базовая поверхность платформы 5 горизонтальна, реактивная масса 4 ориентирована относительно платформы 5 так, что моменты натяжения токоподводов, приложенные к последней, минимальны, объект 10 испытаний жестко связан с базовой поверхностью платформы 5. Выходные сигналы акселерометров 7 и 8 и датчиков 11 в исходном положении устройства обнулены.
Устройство работает следующим образом.
Движения окружающей среды передаются платформе 5 и реактивной массе 4, вызывая их смещения из исходного положения. Акселерометры 7 и 8 и датчики 11 реагируют на эти смещения изменением своих выходных сигналов. Сигналы акселерометров 7 и 8 поступают на входы блока 15 управления абсолютными угловыми перемещениями, который формирует управляющие команды для балансировочных элементов Э.
Эти команды преобразуются балансировочным .элементами 9 в радиальные (горизонтальные) перемещения рабочих масс. В результате вокруг каждой из горизонтальных осей платформы 5 возникают компенсирующие моменты, равные произведению веса перемещаемой массы на величину перемещения. Компенсирующие моменты возвращают платформу 5 в исходное угловое полохсение. Возникающие при радиальных перемещениях масс реактивные силы воспринимаются опорами 2, не вызывая моментов ни на реактивной массе 4, ни на платформе 5. Отсутствие реактивных моментов при работе воздействующих механизмов предлагаемого выполнения существенно улучшает качество угловой стабилизации. В контурах управления абсолютными угловыми перемещениями задействованы только два из трех линейных акселерометра 7, измерительные оси которых горизонтальны. Эти акселерометры реагируют на наклон платформы 5 относительно вектора силы тяжести. Частотный диапазон работы системы управления абсолютными угловыми перемещениями 0- 10 Гц. На частотах выше 10 Гц устройство обеспечивает пассивную виброзащиту испытуемого объекта 10 от угловых колеба- ний окружающей среды за счет фильтрации как в поплавковом подвесе, так и в опорах 2. Сигналы линейных акселерометров 7 поступают также на входы блока 16 управления линейными перемещениями, который формирует управляющие команды для вибраторов 12. Последние вырабатывают компенсирующие усилия, пропорциональные управляющим командам, которые действуют на реактивную массу 4 и через рабочую жидкость б передаются платформе 5, возвращая ее в исходное линейное положение. Частотный диапазон работы системы управ- ления линейными перемещениями 10 - 10Гц.
Нижняя граница диапазона (10 Гц) определяется информационными возможно- 10 стями линейных акселерометров 7. В диапазоне 0-10 Гц уровень ускорений окружающей среды, как показали исследования, соизмерим с собственным шумом акселерометров, поэтому управление неце- 5 лесообразно. На частотах выше 10 Гц устройство обеспечивает пассивную виброзащиту испытуемого объекта 10 от линейных колебаний окружающей среды за счет фильтрации в опорах 2. Жесткая линэй- 0 пая связь реактивной массы 4 и платформы 5 через жидкость 6 обеспечивает отсутствие резонансов и качество управления по линейным направлениям. Сигналы датчиков 11 поступают на входы блока 17 управления 5 относительными перемещениями, который формирует управляющие команды для ре- г уляторов 3 давления воздуха. Последние преобразуют команды блока 17 в изменения давления, которое передается в рабочие по- 0 лости опор 2. Благодаря изменению давления в рабочих полостях опор 2 возникают компенсирующие моменты, приложенные к реактивной массе 4, возвращающие ее в исходное (относительно платформы 5) поло- 5 жение, при котором вредные моменты на осях платформы 5 минимальны. Благодаря этому улучшается качество работы системы управления абсолютными угловыми перемещениями платформы 5. Частотный диапа- 0 зон работы системы управления относительными перемещениями 0-1,1 Гц. Наиболее эффективно использование . предлагаемого устройства при испытаниях прецизионных акселерометров и гиро- 5 скопов в производственных помещениях типичного приборостроительного предприятия, для которого характерен относительно низкий уровень вибраций на фундаменте ( м/с2 по среднеквадратичн ному значению) и резкий подъем спектральной плотности мощности колебаний на частотах 10-100 Гц, обусловленный шумами энергетического оборудования (компрессоры, кондиционеры, вентиляторы, с трансформаторы и т.д.).
По сравнению с известным предлагаемое устройство обеспечивает наиболее существенное уменьшение виброперадачи по вертикальному направлению и вокруг двух горизонтальных осей.
Формула изобретения
Активное виброзащитное устройство, содержащее основание, платформу, установленные между ними компенсаторы и связанные с последними преобразователи дестабилизирующих факторов в электрические сигналы, отличающееся тем, что, с целью расширения диапазона виброзащитного воздействия, компенсаторы выполнены в виде реактивной массы и взаимодействующих с ней пневмоопрр с автоматическими регуляторами давления рабочей среды и в виде балансировочных элементов, закрепленных на оси, и связанного с последней электропривода, а зазор между реактивной массой и платформой заполнен слоем жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМИЗАЦИИ ДИНАМИЧЕСКИХ УСЛОВИЙ ФУНКЦИОНИРОВАНИЯ ГРАВИТАЦИОННО-ЧУВСТВИТЕЛЬНЫХ УСТАНОВОК В УСЛОВИЯХ ОСТАТОЧНЫХ МИКРОУСКОРЕНИЙ НА БОРТУ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2369535C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ И ВИБРОЗАЩИТЫ, В КОТОРОЙ ПРИМЕНЯЮТСЯ НИЗКОФРИКЦИОННЫЕ ТРОСОВЫЕ ДЕМПФЕРЫ | 2014 |
|
RU2645561C2 |
| ВИБРОЗАЩИТНАЯ ПЛАТФОРМА | 1992 |
|
RU2093730C1 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| АКТИВНАЯ ВИБРОЗАЩИТНАЯ ПАНЕЛЬ (БОКС ) С КОМПЕНСАЦИЕЙ СИГНАЛА НАКЛОНА АКСЕЛЕРОМЕТРОВ ДЛЯ СТАЦИОНАРНЫХ УСЛОВИЙ И ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2337390C2 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| ВИБРОЗАЩИТНОЕ УСТРОЙСТВО С УГЛОВОЙ СТАБИЛИЗАЦИЕЙ | 1991 |
|
RU2020324C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР, УПРАВЛЯЕМЫЙ С ПРЯМЫМ ОБНАРУЖЕНИЕМ ПЕРЕМЕЩЕНИЯ ПЛИТЫ ОСНОВАНИЯ | 2010 |
|
RU2503976C2 |

Изобретение относится к средствам защиты от вибраций различных объектов, например точных приборов. Целью изобретения является расширение диапазона виброзащитного воздействия. Виброзащита осуществляется балансировочными элементами, связанными с платформой, на которой закреплен защищаемый объект. Управление указанными элементами осуществляется по сигналам акселерометров через соответствующие блоки управления. Имеется также пассивная защита в виде пневмоопор и поплавкого подвеса. 1 ил.
/ //7 / /// f P
32 84
