Изобретения относятся к медицинской технике, а именно к травматологии и ортопедии, педиатрии, нейрохирургии, а также невропатологии. Изобретения предназначены для информирования пользователя о недопустимом изменении положения его позвоночника в сагиттальной или фронтальной плоскости и имеют цель выработать у пользователя навык правильной осанки, тем самым осуществлять профилактику и коррекцию функциональных нарушений осанки, способствовать лечению ортопедических заболеваний и мобильных деформаций позвоночника.
Заболевания позвоночника занимают 2-3 место среди заболеваний, являющихся причиной инвалидизации больных с заболеваниями костно-мышечной системы. Частота значимых деформаций позвоночника у населения составляет до 10%.
Работа интерактивного устройство коррекции осанки человека основана на принципе биологической обратной связи - технологии, включающей в себя комплекс исследовательских, лечебных и профилактических физиологических процедур, в ходе которых пациенту посредством внешней цепи обратной связи, организованной преимущественно с помощью микропроцессорной или компьютерной техники, предъявляется информация о состоянии и изменении тех или иных собственных физиологических процессов.
Для контакта с пациентом используются зрительные, слуховые, тактильные и другие сигналы-стимулы, что позволяет развить навыки саморегуляции за счет тренировки и повышения лабильности регуляторных механизмов.
Биологическая обратная связь является нефармакологическим методом лечения с использованием специальной аппаратуры для регистрации, усиления и „обратного возврата" пациенту физиологической информации. Основной задачей метода является обучение саморегуляции, обратная связь облегчает процесс обучения физиологическому контролю так же, как процесс обучения любому навыку. Оборудование делает доступной для пациента информацию, в обычных условиях им неосознаваемую.
С целью формирования правильной осанки, повышения эффективности консервативного лечения деформаций и заболеваний позвоночника было предложено множество различных конструкций тренажеров-корректоров осанки, работающих на принципе биологической обратной связи.
Все устройства этого предназначения имеют датчик, исполненный в виде включателя или электромеханического преобразователя, блока обработки полученного сигнала, информирующего блока (светодиод, лампочка, вибромотор, сирена, зуммер, электромиостимулятор…), элементы питания и систему крепления на пациенте.
В настоящий момент известны следующие актуальные конструкции тренажеров-корректоров осанки:
RU №2081646, кл. A63B 71/06, A41D 13/12, Опубл. 1997-06-20) [1],
RU №2103955, кл. A61F 5/00, Опубл. 1998-02-10) [2],
FR 2539296 A61B 5/11; A63B 23/02; (IPC1-7): A61F 5/00, опубликовано 1984-07-20 [3],
DE 19800255 A61B 5/103; A63B 23/02; G01B 7/16; (IPC1-7): A61B 5/11; A61F 5/00; G01B 11/14; G01B 21/02; G01B 21/16; G01L 1/22; G11C 11/54, опубликовано 1998-09-24 [4],
US 2008319351 A61B 5/103 - Опубликовано: 2008-12-25 [5],
TW 201106933 A61F5/02, опубликовано 2011-03-01 [6],
Заявителем ранее были получены патенты на изобретения «Интерактивный тренажер-корректор осанки» (RU №2329778, от 27 июля 2008 года) [7] и «Оптический датчик деформации» (RU №2381489, от 10 февраля 2010 года).
Так в изобретении RU №2081646 нет возможности настройки пользователем диапазонов срабатывания устройства, работа устройства основана на включении от контактного датчика (выключателя) и, по сути, описывает общий принцип работы всех систем биологической обратной связи, предназначенных для коррекции осанки [1].
Устройство, описанное в изобретение FR 2539296 (а также в RU №2103955) также работает от включения контактного датчика (включателя), который включается от натяжения шнура, расположенного вдоль позвоночника. Устройства подобного типа не избирательно включаются при возникновении деформации в анализируемом отделе позвоночника, так как основаны на оценке изменения общей длины шнура натянутого вдоль позвоночника, не позволяют пользователю самостоятельного регулировать порог включения устройства, имеют очень низкий порог чувствительности и характеризуются значительным упругим гистерезисом [2], [3].
В изобретении DE 19800255, помимо описания общего принципа работы систем с биологической обратной связью, введена временная задержка оповещающего сигнала и описана работа устройства, оценивающего деформацию по косвенным признакам [4]. А именно, вывод о наличии и изменении деформации позвоночника предполагается делать при увеличении механического давления над вершиной деформации или противоположной стороне. Регистрация давления в заявленном изобретении осуществляется при помощи датчика давления, что позволяет больше оценить давление под датчиком и в меньшей степени деформацию позвоночника. Для практической реализации этой модели устройства необходимо использовать совместно с датчиком давления поверхность (точки) противоупора, что реально возможно, на наш взгляд, только в жестком корсете, в противном случае погрешность измерений будет недопустимо высокой. В то же время, ношение жесткого корсета не располагает к использованию тренажера-корректора осанки по причине ограничения движений туловища. Дополнительно, работа заявленного устройства может осуществляться на регистрации таких косвенных показателях как удлинение или укорочение длины поверхностей, которые возникают при сгибании или деформации туловища. Для регистрации геометрических изменений расстояний, возникающих при изменении осанки спины, в области грудины, грудной клетки, плечевого пояса, поясничного отдела или других частей тела, автор предлагает клеймить или маркировать туловище, а возникающие изменения при их растяжении или сжатии регистрировать непосредственно или при помощи оптических систем. Регистрация удлинения или укорочения туловища непосредственно (как ранее было реализовано в изобретениях FR 2539296, RU №2103955) или опосредованными способами имеет значительные недостатки - необходимость маркировать или клеймить поверхность, в том числе человека, значительной толщиной датчика (так как относительное удлинение или укорочение поверхности датчика изгиба связано с его толщиной), помимо этого регистрация деформаций подобным способом не избирательна и на его значения будут оказывать повороты туловища, дыхательные движения пользователя, и даже любые внешние воздействия, будь то давление одежды либо любой другой внешний артефакт.
Устройство, описанное в изобретении US 2008319351, предназначено для наблюдения за состоянием шейного и поясничного отделов позвоночника [5]. Так же как и в изобретении DE 19800255 для оценки положения позвоночника регистрируются косвенные показатели. Электромеханический преобразователь в изобретении измеряет давление, силу, ускорение или скорость. На основании полученных данных делается вывод о положении позвоночника. Основной недостаток устройства связан с использованием косвенных критериев оценки, а именно - значительная погрешность при выполнении измерений, на значение которых в первую очередь окажут влияние скорость перемещения пользователя (в том числе в транспортном средстве), и невозможность оценить деформацию в нужном отделе позвоночника.
Устройство, описанное в заявке TW 201106933, представляет собой систему из множества датчиков расположенных над позвоночником сзади, которые оценивают положение позвоночника во всех плоскостях [6]. Недостатки устройства следующие:
1. Наиболее поддаются коррекции нарушения осанки в сагиттальной плоскости (кифоз). Для объективной оценки состояния позвоночника в этой плоскости желательно оценивать изгиб одного отдела позвоночника одним протяженным датчиком, причем этом датчик должен располагаться над всем оцениваемым участком позвоночника. Установка нескольких коротких датчиков последовательно над одним изгибом позвоночника (из-за отсутствия длинного) значительно увеличит погрешность измерений.
2. Наиболее трудными для коррекции при помощи систем с биологической обратной связью являются нарушения во фронтальной плоскости (сколиоз). Опыт установки датчиков деформации при таких нарушениях показывает, что наибольшую разрешающую способность можно получить при установке датчика над «треугольниками талии», иногда над горбом либо над противоположной вогнутостью. Установка датчика над позвоночником при сколиотических нарушениях (что вызвано желанием при помощи одного датчика, установленного в одной точке регистрировать изменения в трех плоскостях позвоночника) не позволяет регистрировать приемлемые результаты даже у худых пациентов и будет мало информативна.
3. Помимо этого, поступление одновременно нескольких сигналов информирующих об отклонениях позвоночника в нескольких плоскостях сильно дезориентирует пользователя, и, по сути, лишает его подвижности, в то время как целью тренировок является выработка правильной осанки для обычной жизни при обычных движениях.
4. Избыточность заведомо не используемых функций и элементов (а именно оценка биомеханики позвоночника по осям (X, Y и Z) увеличивает себестоимость изделия и не имеет прикладного значения для медицинской практики.
Таким образом, несмотря на различные технические решения ни один из перечисленных устройств коррекции осанки не является идеальным.
В изобретении RU №2329778 датчик деформации оценивает непосредственно кривизну позвоночника [7].
Наиболее близким по технической сущности и достигаемому результату является тренажер-корректор осанки по патенту RU №2329778, состоящий из чувствительного элемента, блока индикации и приспособления для закрепления элементов тренажера на пациенте, отличающийся тем, что он дополнительно снабжен блоком управления, при этом чувствительный элемент расположен на упругом основании, которое фиксируют вдоль позвоночника и/или туловища пациента, а модуль упругости материала из которого изготовлено упругое основание не более 1500 Н/мм2, причем блок управления позволяет различать характер и величину деформации, возникающую на чувствительном элементе. [7].
Однако данная конструкция имеет ряд недостатков. Недостатком этого устройства является обязательное применение в устройстве такого элемента как упругое основание, на которое крепится чувствительный элемент (элементы), а также несистемность расположения этого чувствительного элемента на пациенте, что значительно ограничивает удобство использования данного устройства и точность регистрируемых результатов. Обязательное использование упругого основания в ранее заявленном тренажере имело целью увеличить зону измерений над позвоночником при использовании коротких чувствительных элементов -тензодатчиков (длина которых практически не превышала 5 см.). Помимо этого, применение упругого основания с фиксированными на нем чувствительными элементами значительно усложняло изготовление устройства, служило причиной частых поломок устройства и не точностей при измерениях.
Динамическое измерение кривизны позвоночника на живом движущемся человеке представляет собой достаточно сложную задачу. Так помимо основной задачи получить достоверные данные о деформации позвоночника, тренажер-корректор осанки с измерительным датчиком не должен препятствовать движениям пользователя. Он должен работать стабильно в широком амплитудном диапазоне и информировать об изменениях в оцениваемой плоскости измерений, исключая внесение погрешностей от изменения положения позвоночника в других отделах и плоскостях, изменения положения рук и надплечий, на показатели работы также не должны оказывать влияния помехи в виде случайного давления на спину, ускорение движения, магнитные поля и другие паразитные явления. С практической точки зрения необходимо оценивать суммарные изменения положения позвоночника на заинтересованном протяженном участке.
Существуют различные способы коррекции осанки.
Способ коррекции осанки при помощи интерактивных устройств коррекции осанки человека включает следующие шаги: подготовительный, заключающийся в закреплении устройства на пациенте, калибровка (настройка, предустановка) показателей устройства в положении правильной осанки, мониторинг изменений осанки, и в случае отклонения фактических значений от заданных формирование исправляющих действий (формирование оповещающего сигнала) и окончание работы.
Способ коррекции осанки предложенный авторами TW 201106933 включает перечисленные этапы, при этом происходит сравнивание изменений между двумя смежными направлениями по осям X, Y и Z [6]. Затем данные сравниваются с заранее установленными данными и в случае, если углы превышают установленное значение, возникает предупреждающий сигнал, который посылается пользователю. Недостатки указанного способа связаны с конструктивными особенностями устройства и были проанализированы выше.
Технический результат, на достижение которого направлены настоящие изобретения, заключается в повышении удобства эксплуатации, увеличении точности измерений и надежности работы устройства с целью увеличения лечебного эффекта, направленного на эффективную тренировку пациента для профилактики и лечения неправильной осанки, а также сагиттальной и/или фронтальной мобильных деформаций позвоночника.
Указанный технический результат в интерактивном устройстве коррекции осанки человека, содержащем, по крайней мере, один оптический датчик деформации, связанный через каналы связи с системой управления и обработки информации и системой индикации результатов обработки информации, и систему крепления, предназначенную для закрепления компонентов устройства на человека, достигается тем, что оптический датчик деформации выполнен гибким в виде длиной продольной пластинки, при этом его длина составляет величину не менее чем протяженность трех смежных позвонков на контролируемом участке позвоночника человека, но не более чем протяженность однонаправленного изгиба туловища или позвоночника человека, а ширина оптического датчика деформации меньше ширины межлопаточного пространства.
Использование оптического датчика деформации выполненного гибким в виде длиной прямоугольной пластинки повысит точность измерений за счет локальной установки датчика к нужном отделе позвоночника/туловища, позволит выборочно измерять изгиб позвоночника (туловища) в требуемой плоскости, что обусловлено особенностями пластинчатого датчика, который оценивает преимущественно изгиб в одной плоскости, исключив, таким образом, влияние на него неоцениваемых деформаций (например, при оценке сагиттальных изгибов и установке датчика плоскостью на сагиттальный контур человека, паразитными будут деформации во фронтальной плоскости или ротационные и они не будут зарегистрированы).
Использование гибкого оптического датчика деформации в виде длиной прямоугольной пластинки длиной не менее, чем протяженность трех смежных позвонков на контролируемом участке позвоночника, но не более, чем протяженность однонаправленного изгиба позвоночника человека, позволяет учесть индивидуальные особенности человека и полноценно измерять деформацию на требуемом уровне в результате чего повышается точность измерения деформации при нарушении осанки, что также приводит к уменьшению количества ложных реакций корректора и ложных оповещений о нарушении осанки, а, следовательно, к повышению надежности работы устройства. Использование датчика меньшей длины значительно увеличит погрешность измерений, применение одного датчика большей длины также не целесообразно потому как разнонаправленные изгибы на одном датчике также увеличат погрешность измерений.
Совокупность признаков, изложенных в п.2 формулы изобретения характеризует устройство коррекции осанки тем, что в качестве системы управления и обработки информации используется мобильный телефон, либо коммуникатор, либо планшетный или стационарный компьютер, либо другое процессорное устройство с соответствующим программным обеспечением, благодаря компактности и распространенности которых повышается удобство и доступность использования устройства, так как не требуется специализированных устройств.
Совокупность признаков, изложенных в п.3 формулы изобретения характеризует устройство коррекции осанки тем, что система управления и обработки полученной информации, в качестве которой используется планшетный или стационарный компьютер, либо другое процессорное устройство с соответствующим программным обеспечением, связано с несколькими оптическими датчиками деформации, в том числе расположенными у разных пользователей благодаря этому единая система управления и обработки полученной информации может быть использована в кабинетах лечебной физкультуры или аналогичных помещениях для проведения групповых упражнений по формированию правильной осанки, что повышает удобство эксплуатации.
Совокупность признаков, изложенных в п.4 формулы изобретения характеризует устройство коррекции осанки тем, что система управления и обработки информации включает блок визуализации деформации, возникающей на эластичном оптическом датчике деформации, благодаря чему пользователь устройства визуально наблюдает изменения при коррекции им осанки, что позволяет упростить настройку устройства и, в конечном итоге, должно повысить лечебный эффект.
Совокупность признаков, изложенных в п.5 формулы изобретения характеризует устройство коррекции осанки тем, что система управления и обработки информации включает блок электронной памяти для регистрации и сохранения показаний, возникающей на оптическом датчике деформации, благодаря чему повышается информированность пользователя устройства, и врача, контролирующего процесс, что в конечном итоге, должно повысить лечебный эффект.
Совокупность признаков, изложенных в п.6 формулы изобретения характеризует устройство коррекции осанки тем, что в качестве системы индикации результатов обработки информации используется мобильный телефон, либо коммуникатор, либо планшетный или стационарный компьютер, либо другое процессорное устройство с соответствующим программным обеспечением, благодаря компактности и распространенности которых повышается удобство и доступность использования устройства, так как не требуется специализированных устройств.
Совокупность признаков, изложенных в п.7 формулы изобретения характеризует устройство коррекции осанки тем, что система индикации результатов обработки информации включает оптический или/и звуковой, или/и электрический, или/и механический или/и вибрационный источник сигнала, что позволяет пользователю устройства выбрать наиболее адекватный для него сигнал оповещения, что повышает удобство эксплуатации.
Совокупность признаков, изложенных в п.8 формулы изобретения характеризует устройство коррекции осанки тем, что система управления и обработки информации включает электромиостимулятор, что позволит проводить электростимуляцию мышц разгибателей спины в случае недостаточного разгибания позвоночника, тем самым повысить эффективность работы устройства.
Совокупность признаков, изложенных в п.9 формулы изобретения характеризует устройство коррекции осанки тем, что помимо проводной связи в качестве каналов связи используются радио, в том числе стандарта Bluetooth, благодаря чему повысится удобство пользования устройством т.к. в этом случае не будет провода, соединяющего датчик и системы устройства между собой.
Совокупность признаков, изложенных в пунктах. 10, 11 и 12 формулы изобретения характеризует особенности системы крепления, используемой в устройстве коррекции осанки, которые связаны с использованием различных приспособлений для размещения и закрепления компонентов устройства на человеке и обеспечения удобства эксплуатации, таких как пояса, ремни, шнуровка, и/или лента Велкро (контактная лента), и/или механические замки для закрепления на человеке, накладных карманов или отделений в этих приспособлениях для закрепления компонентов устройства, подтяжек, и/или пояса в виде бандажа, шейного воротника, корсета, в том числе с наплечными лямками, и/или одежды, например, майку, футболку, жилет, топ, спортивный бюстгальтер или аналогичную часть одежды, и/или неинтерактивный корректор осанки для закрепления гибкого оптического датчика деформации и/или систем устройства.
Совокупность признаков, изложенных в п.13 формулы изобретения, характеризует особенности системы крепления гибкого датчика деформации при помощи подтяжек и обеспечивает удобство эксплуатации.
Совокупность признаков, изложенных в п.14 формулы изобретения характеризует устройство коррекции осанки тем, что параллельно сбоку, над и/или под датчиком деформации расположена одна или несколько плоских пружин из металла, и/или полимера, и/или композитного материала для предотвращения остаточной деформации датчика в случае его неправильной эксплуатации, что повышает надежность работы устройства.
Технический результат в предлагаемом способе, заключающемся в том, что на пациенте закрепляются элементы интерактивного устройства коррекции осанки человека, в системе управления и обработки информации выполняется установка предельно допустимых значений изгиба позвоночника, выбирается вид сигнала оповещения, производится регистрация значений изгиба позвоночника при помощи оптического датчика деформации, сравниваются зарегистрированные значения изгиба позвоночника с предельно допустимыми значениями и, в случае превышения зарегистрированных значений изгибов позвоночника сверх предельно допустимых значений, формируется и подается сигнал оповещения, достигается тем, что при закреплении элементов интерактивного устройства коррекции осанки человека гибкий оптический датчик деформации устанавливается на месте контролируемого отдела позвоночника и прижимается к нему, при этом плоскость коррекции оцениваемого изгиба позвоночника человека должна быть перпендикулярна к срединной поверхности пластины оптического датчика деформации, а регистрация значений изгиба позвоночника, выполняемая одним датчиком деформации, должна осуществляться на участке протяженностью не менее чем протяженность трех смежных позвонков на контролируемом участке, но не более чем протяженность однонаправленного изгиба.
Установка гибкого оптического датчика деформации на месте контролируемого отдела позвоночника и прилегание датчика к поверхности контролируемого отдела позволит оценить изгиб именно необходимого отдела позвоночника и сделать вывод о его непосредственном состояния, а не использовать косвенные малоинформативные показатели, такие как общая длина туловища (FR 2539296, RU №2103955) или любая скорость перемещения в пространстве (US 2008319351).
Установка датчика таким образом, что бы плоскость коррекции оцениваемого изгиба позвоночника человека была перпендикулярна к срединной поверхности пластины оптического датчика деформации позволит установить максимальную чувствительность датчика при деформации изгиба в интересуемой плоскости, что особенно важно при условиях малой амплитуды движений позвоночника, а также исключить или минимизировать влияние на показания датчика деформаций в других плоскостях.
Регистрацию значений изгиба позвоночника необходимо выполнять на участке протяженностью не менее чем протяженность трех смежных позвонков на контролируемом участке, потому что оценка деформации изгиба на меньшей протяженности значительно увеличивает погрешность измерений и малоинформативна. В тоже время, протяженность измерений, приходящихся на один оптический датчик, не должна превышать протяженность однонаправленного изгиба. В случае большей протяженности датчика на его показания будут оказывать влияние противонаправленный изгиб, что будет вносить погрешность измерений и нецелесообразно с точки зрения пользователя, потому что усложнит распознавание пользователем возникающих оповещающих сигналов, которые будут одинаковы для каждого изгиба позвоночника. В случае необходимости мониторинга положения позвоночника на протяженности двух или более изгибов, целесообразно на каждый изгиб устанавливать отдельный датчик с длиной не превышающей однонаправленный изгиб.
Совокупность признаков, изложенных в п.16 формулы изобретения характеризует способ коррекции осанки тем, что формирование оповещающего сигнала производится с временной задержкой, что позволит формировать оповещающий сигнал только при протяженном во времени отклонении кривизны позвоночника от заданных показателей (несколько секунд), благодаря чему стереотип формирования правильной осанки будет формироваться на систематическое нарушение осанки, а не на случайные наклоны, которые могут быть вызваны причинами не связанными с нарушениями осанки, а это в конечном итоге должно повысить надежность способа и лечебный эффект.
Совокупность признаков, изложенных в п.17 формулы изобретения, характеризует способ коррекции осанки тем, что установка предельно допустимых значений положений позвоночника выполняется вручную или автоматически в соответствии с программой тренировки, благодаря чему существует возможность выбора различных режимов тренировок по различным программам или по критериям установленным самостоятельно, а также дистанционный контроль и коррекция режимов тренировок медицинским персоналом, например, через интернет.Направлено на повышение удобства эксплуатации и эффективность лечебного эффекта.
Совокупность признаков, изложенных в п.18 формулы изобретения, характеризует способ коррекции осанки тем, что данные регистрации и сравнение полученных значений с предельно допустимыми документируются или архивируются в электронном виде, что позволит осуществлять анализ эффективности и контролировать использование тренажера медицинским персоналом либо родителями детей и подростков, что повышает удобство эксплуатации и способствует увеличению лечебного эффекта.
Предлагаемое устройство иллюстрируется чертежами фиг.1-4.
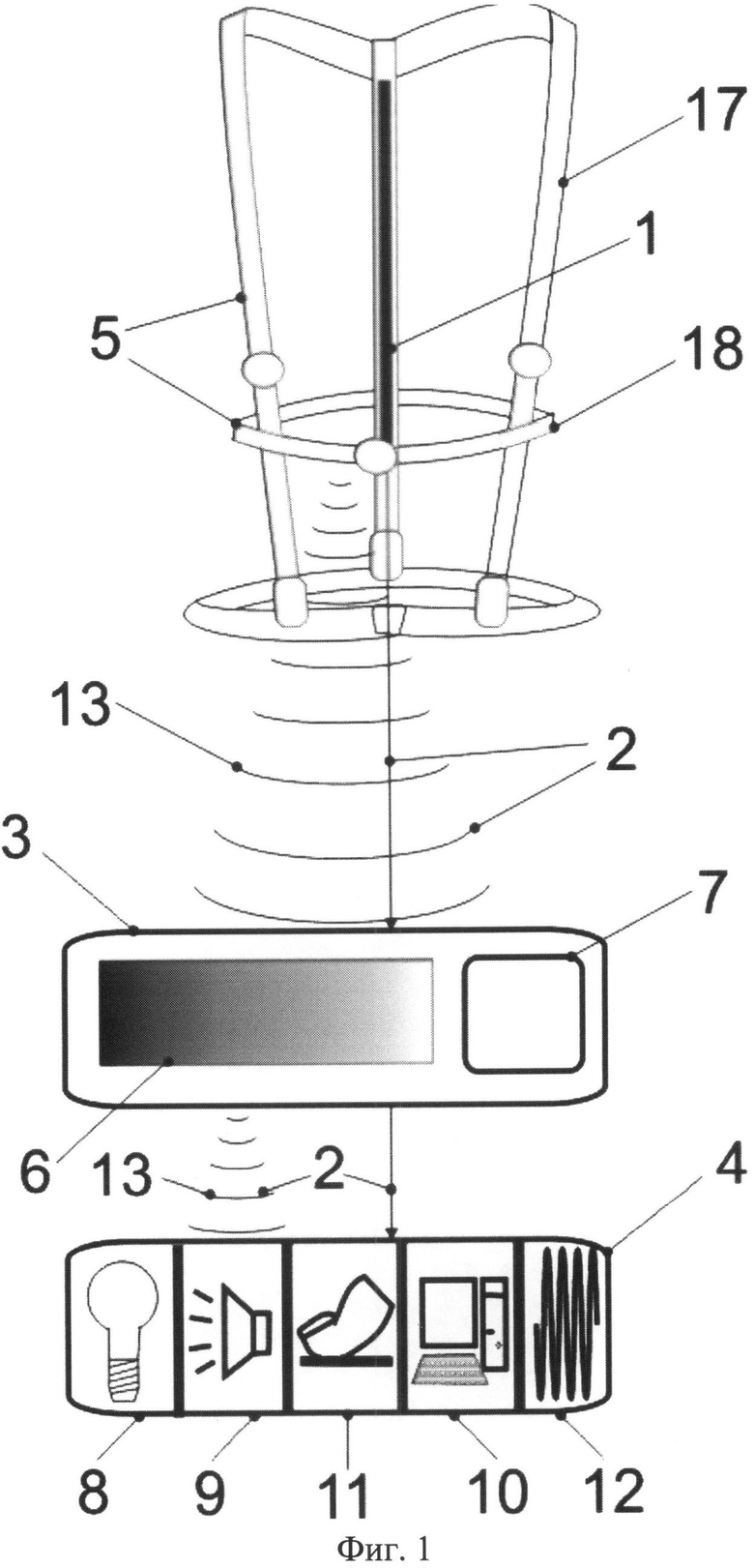
На фиг.1 представлена блок-схема тренажера-корректора осанки.
На фиг.2 изображен алгоритм способа коррекции осанки.
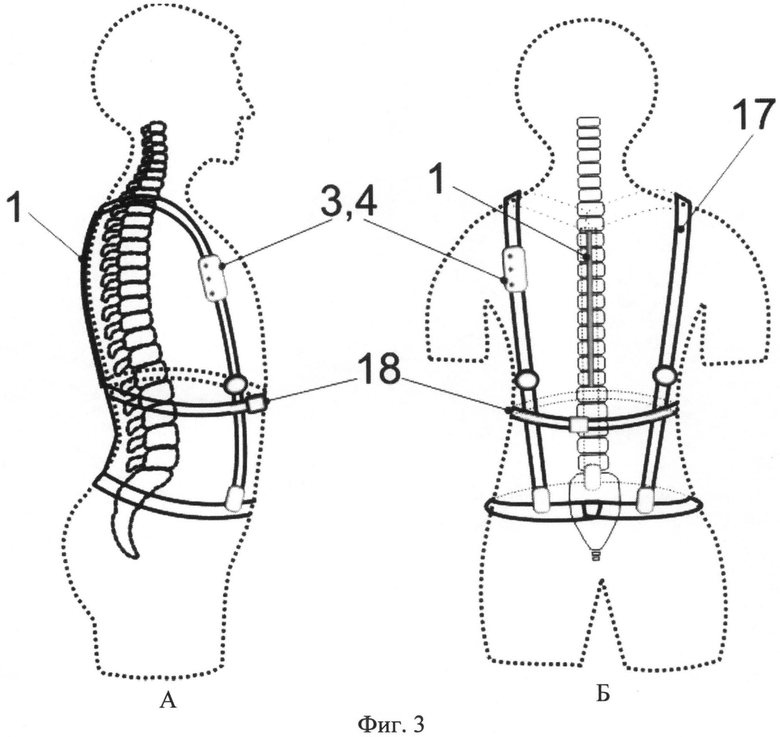
На фиг.3 (А-Г) показана установка устройства на пациента при помощи подтяжек (А - вид сбоку, Б - вид спереди).
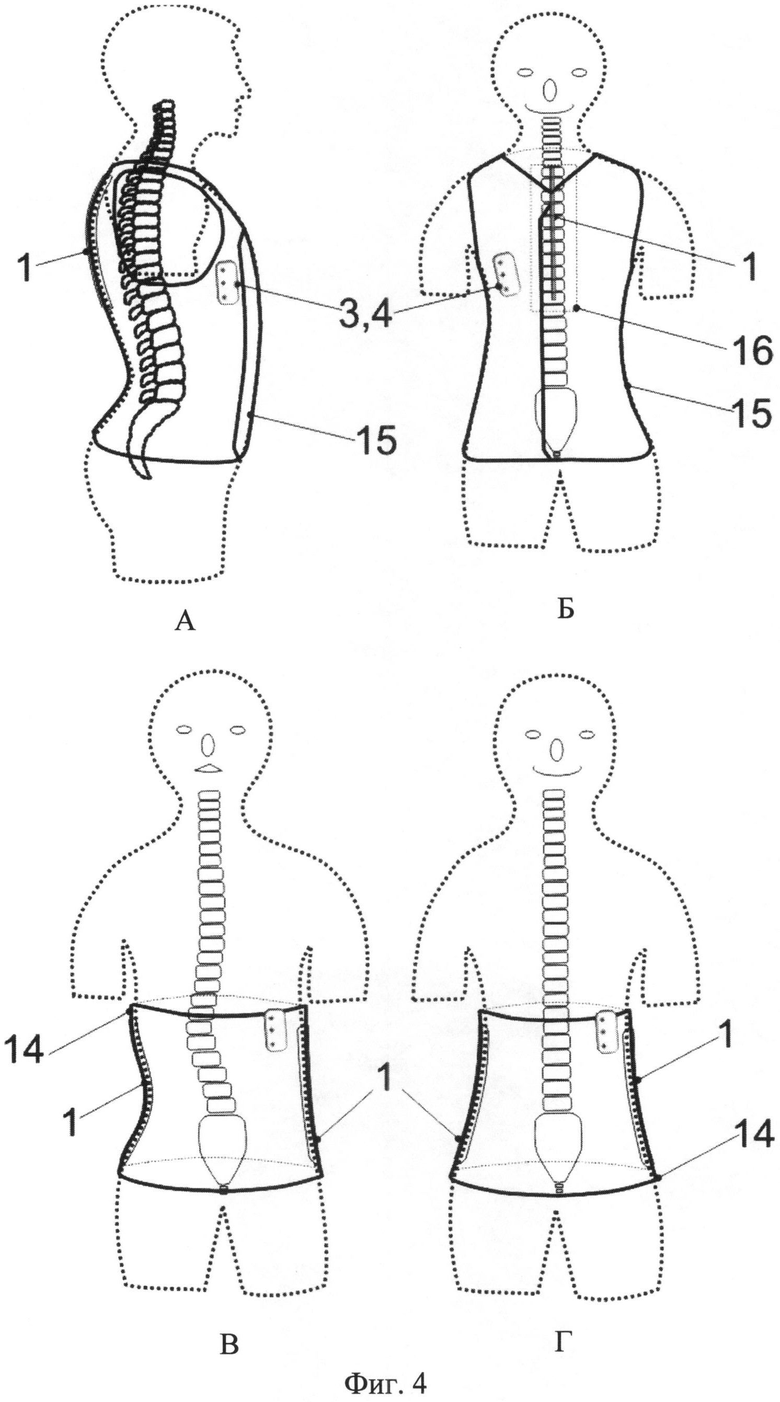
На фиг.4 (А-Г) представлены возможные варианты исполнения устройства с креплением: при помощи одежды датчик установлен в грудном отделе позвоночника (А - вид сбоку, Б - вид спереди) и при помощи бандажа датчики установлены на треугольники талии при сколиотической деформации поясничного отдела позвоночника (В - вид спереди при наличии сколиотической деформации Г -вид сбоку, сколиотической деформации нет).
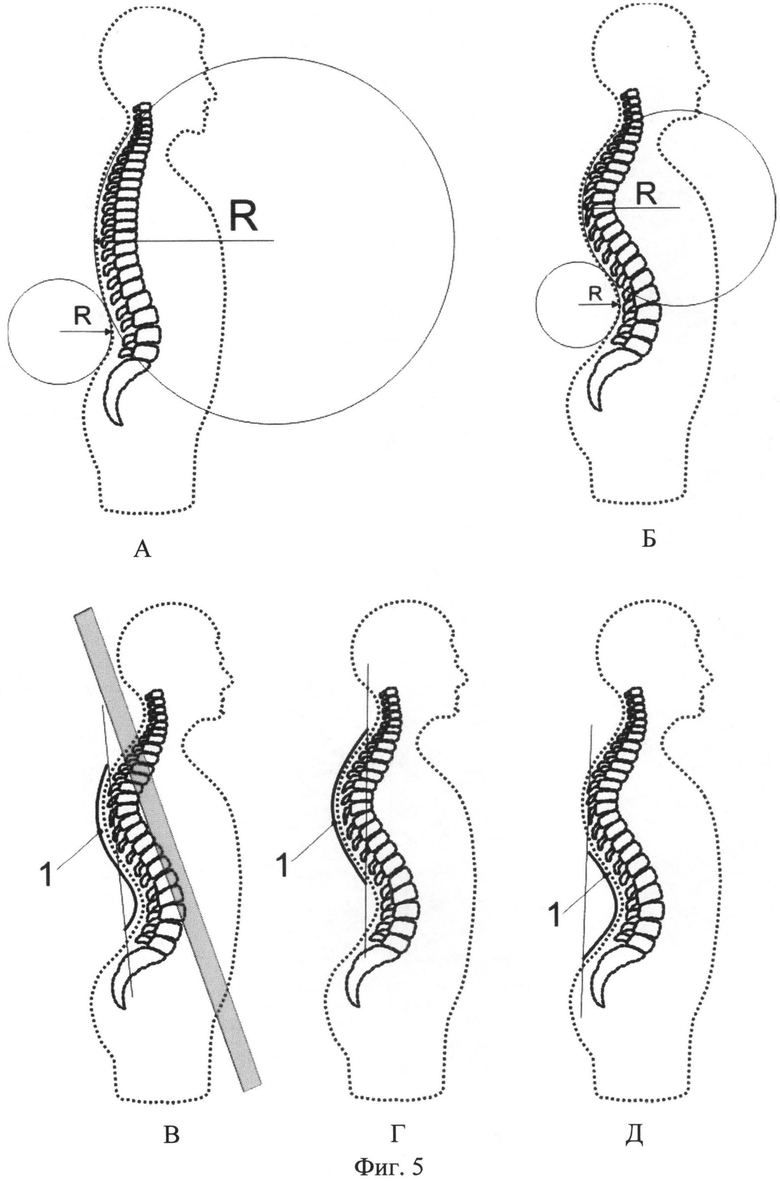
На фиг.5 (А-Г) в качестве примера приведены различные типы осанки и варианты расположения датчика в зависимости от протяженного однонаправленного изгиба позвоночника. (А - протяженный кифоз грудного и переходного отделов позвоночника большого радиуса, невыраженный лордоз поясничного отдела позвоночника, Б - короткий кифоз грудного отдела меньшего радиуса, глубокий поясничный лордоз, В - неправильная установка датчика - длина датчика больше, чем протяженность однонаправленного изгиба, (датчик перекрывает грудной кифоз и поясничный лордоз), Г - правильная установка датчика, датчик расположен в грудном отделе и его длина не превышает длину однонаправленного изгиба позвоночника, Д - правильная установка в поясничном отделе позвоночника).
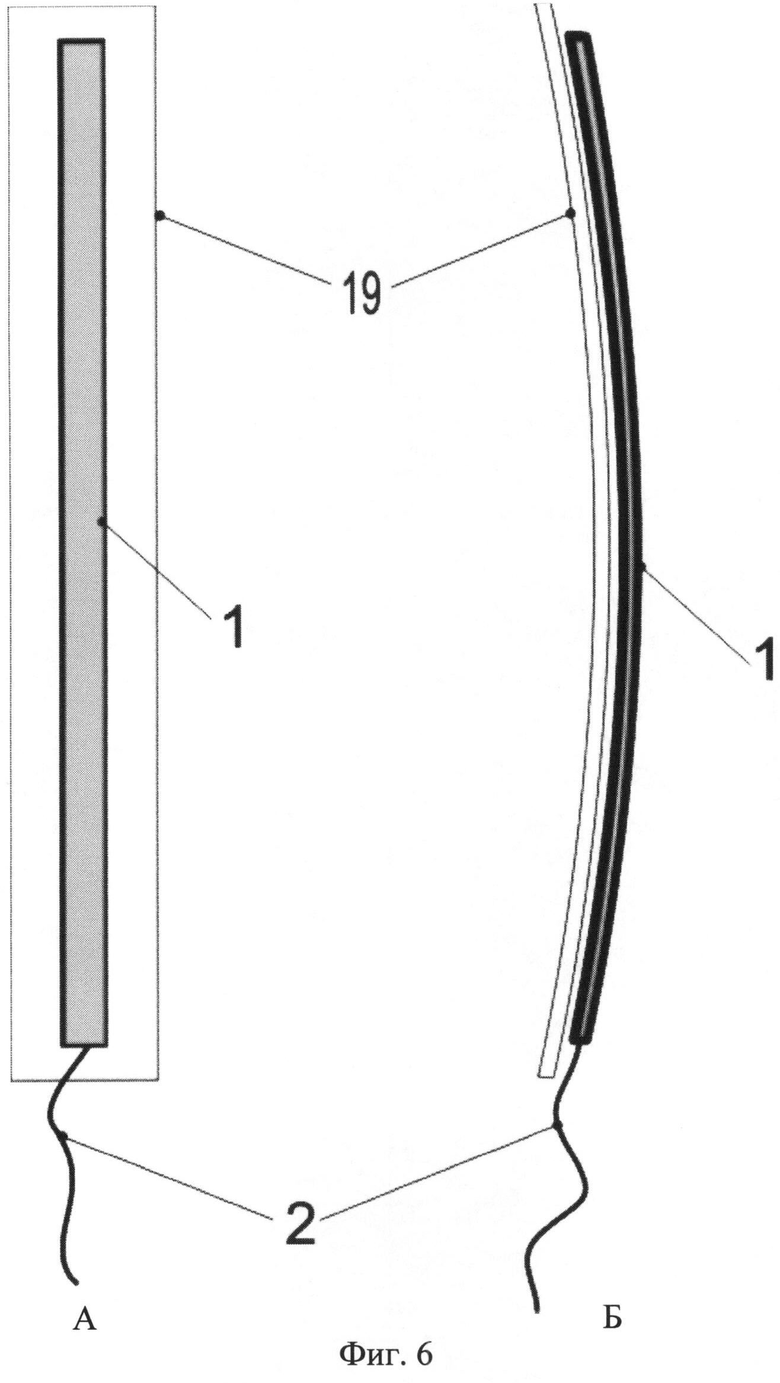
На фиг.6 (А-Б) представлен вариант расположения датчика и плоской пружины под ним.
Интерактивное устройство коррекции осанки человека состоит из оптического датчика деформации 1, связанного через каналы связи 2 с системой управления и обработки информации 3 и системой индикации результатов обработки информации 4, и системы крепления 5, предназначенной для закрепления компонентов устройства на человеке. Оптический датчик деформации 1 выполнен гибким в виде длинной прямоугольной пластинки, при этом его длина составляет величину не менее чем протяженность трех смежных позвонков на контролируемом участке позвоночника человека, но не более чем протяженность однонаправленного изгиба туловища или позвоночника человека (фиг.1, 3-5).
Показатели с датчика деформации могут сниматься непрерывно либо дискретно с заданной частотой, в этом случае происходит уменьшение энергопотребления устройством. Питание устройства осуществляется от батарейки или аккумулятора.
Оптический датчик 1 имеет защитный кожух, выполненный, например, из ткани или полимерного материала. Защитный кожух необходим для предотвращения повреждений чувствительного элемента и попадания на него света, который может быть источником помех. Оптический датчик деформации 1 изготавливается индивидуально, либо в виде нескольких типоразмеров.
Система управления и обработки информации 3 включает блок визуализации деформации 6, возникающей на оптическом датчике деформации 1. В качестве блока визуализации может быть использован любой подходящий по размерам электронный экран или, например, индикаторная полоса из светодиодов или аналогичные технические решения (фиг.1).
Система управления и обработки полученной информации 3 позволяет плавно или дискретно изменять амплитудную и/или частотную характеристику сигнала выводимого системой индикации результатов обработки информации 4. Так, например, при использовании системы индикации результатов обработки информации 4 элементов звукового оповещения при нормальном положении позвоночника сигнал не производится, при усилении сгибания появится сигнал определенной интенсивности или тональности, при большем сгибании - сигнал большей громкости и/или другой тональности.
Система управления и обработки информации 3 включает блок электронной памяти 7 для регистрации и сохранения показаний, возникающей на оптическом датчике деформации 1 (фиг.1).
Система индикации результатов обработки информации 4 включает оптический 8 или/и звуковой 9, или/и электрический 10, или/и механический 11 или вибрационный 12 источник сигнала (фиг.1, 2).
В качестве каналов связи используются радио 13, в том числе стандарта Bluetooth (фиг.1).
Для закрепления компонентов устройства система крепления 5 содержит пояс в виде бандажа 14 или одежду 15 с накладными карманами (или отделениями) 16 (фиг.4).
Система крепления 5 включает подтяжки 17, в которые встроен датчик деформации 1. Для прижатия нижнего конца датчика деформации 1 к туловищу подтяжки содержат прижимающий пояс 18, выполненный из эластичного материала, например, резины (фиг.1, 3).
Такое разнообразие различных вариантов систем крепления 5 обусловлено тем, что необходимо перемещать и устанавливать датчик деформации 1 на контролируемый участок позвоночника (туловища), а также необходимостью обеспечить удобство при фиксации всех систем устройства.
Параллельно под датчиком деформации 1 расположена плоская пружина 19 из металла, и/или полимера, и/или композитного материала (фиг.6).
Клинический пример.
Больной П., 15 лет, находился на стационарном лечении в СПб ГУЗ ВЦДОиТ «Огонек» с диагнозом последствия болезни Шоермана-Мау. Больному проведен курс традиционного консервативного лечения (ЛФК, ФТЛ и т.п.) и проведена тренировка мышц разгибателей спины позвоночника предлагаемым интерактивным устройством коррекции осанки человека заявленным способ коррекции осанки.
На пациенте закрепляли элементы интерактивного устройства коррекции осанки человека так, что бы оптический датчик деформации располагался над контролируемым мобильным участком позвоночника перпендикулярно своей рабочей плоскостью к плоскости оцениваемого изгиба и был прижат к оцениваемому участку при помощи системы крепления. Оптический датчик деформации устанавливается, таким образом, что бы его длина не превышала протяженности однонаправленного изгиба позвоночника. В системе управления и обработки информации выполняется установка предельно допустимых значений изгиба позвоночника, выбирается вид сигнала оповещения. После этого устройство осуществляет регистрацию значений изгиба позвоночника, выполняется сравнение зарегистрированные значения изгиба позвоночника с предельно допустимыми значениями и, в случае превышения зарегистрированных значений изгибов позвоночника сверх предельно допустимых значений, формируется и подается сигнал оповещения. Сигнал оповещения формируется до тех пор, пока пациент не распрямит позвоночник до приемлемого положения.
Коррекция деформаций позвоночника с помощью предлагаемого устройства осуществлялась в течение 4 недель ежедневных тренировок по 50-60 минут. В результате проведенного лечения достигнута регрессия кифотической деформации, улучшился сагиттальный баланс позвоночника.
Таким образом, предлагаемое устройство коррекции осанки осанки позволяет более эффективно корригировать мобильные деформации позвоночника, с учетом всех индивидуальных особенностей пациента, а также комфортен и удобен в эксплуатации.
Устройство коррекции осанки человека было апробирован на базе СПб ГУЗ ВЦДОиТ «Огонек» у 30 пациентов. Он показал эффективность при консервативном лечении больных вертебрологического профиля с мобильными кифотическими и сочетанными деформациями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР-КОРРЕКТОР ОСАНКИ | 2006 |
|
RU2329778C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО МОНИТОРИНГА И КОРРЕКЦИИ ОСАНКИ (ВАРИАНТЫ) | 2021 |
|
RU2810404C2 |
| СПОСОБ КОРРЕКЦИИ ОСАНКИ | 2021 |
|
RU2775343C1 |
| ОПТИЧЕСКИЙ ДАТЧИК ДЕФОРМАЦИИ | 2008 |
|
RU2381489C1 |
| СПОСОБ СКРИНИНГОВОЙ ДИАГНОСТИКИ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОЙ СИСТЕМЫ | 2013 |
|
RU2532281C1 |
| КОРСЕТ КОРРИГИРУЮЩИЙ | 2006 |
|
RU2317800C1 |
| МАТРАЦ ОРТОПЕДИЧЕСКИЙ | 2003 |
|
RU2240765C1 |
| КОРСЕТ ФИКСИРУЮЩИЙ | 2005 |
|
RU2284168C1 |
| СПОСОБ КОРРЕКЦИИ ОСАНКИ | 2018 |
|
RU2698861C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И АНАЛИЗА ДЕЙСТВИЙ, ПОВЛЕКШИХ ОТКЛОНЕНИЯ ПОЛОЖЕНИЯ ПОЗВОНОЧНИКА ОТНОСИТЕЛЬНО ВЕРТИКАЛЬНОЙ ОСИ ТЕЛА ЧЕЛОВЕКА, И СПОСОБ ИСПРАВЛЕНИЯ ОТКЛОНЕНИЯ ПОЛОЖЕНИЯ ПОЗВОНОЧНИКА ОТНОСИТЕЛЬНО ОСИ ТЕЛА ЧЕЛОВЕКА | 2021 |
|
RU2788808C1 |

Группа изобретений относится к области медицины, а именно к травматологии и ортопедии, педиатрии, нейрохирургии, а также невропатологии, и предназначена для осуществления коррекции и профилактики функциональных нарушений осанки путем информирования пользователя о недопустимом изменении положения его позвоночника в сагиттальной или фронтальной плоскости с целью выработать у пользователя навык правильной осанки, тем самым способствуют лечению ортопедических заболеваний и мобильных деформаций позвоночника. Интерактивное устройство коррекции осанки человека содержит по крайней мере один оптический датчик деформации, связанный через каналы связи с системой управления и обработки информации и системой индикации результатов обработки информации, и систему крепления, предназначенную для закрепления компонентов устройства на человеке. Оптический датчик деформации выполнен гибким в виде продольной пластинки. Длина датчика составляет величину не менее чем протяженность трех смежных позвонков на контролируемом участке позвоночника человека, но не более чем протяженность однонаправленного изгиба туловища или позвоночника человека. Ширина оптического датчика деформации меньше ширины межлопаточного пространства. Способ коррекции осанки заключается в том, что на пациенте закрепляют элементы интерактивного устройства коррекции осанки человека. В системе управления и обработки информации выполняют установку предельно допустимых значений изгиба позвоночника. Выбирают вид сигнала оповещения. Затем производится регистрация значений изгиба позвоночника при помощи оптического датчика деформации, сравниваются зарегистрированные значения изгиба позвоночника с предельно допустимыми значениями и в случае превышения зарегистрированных значений изгибов позвоночника сверх предельно допустимых значений формируется и подается сигнал оповещения. При закреплении элементов интерактивного устройства коррекции осанки человека оптический датчик деформации устанавливают на месте контролируемого отдела позвоночника и прижимают к нему, при этом плоскость коррекции оцениваемого изгиба позвоночника человека должна быть перпендикулярна к срединной поверхности пластины оптического датчика деформации. Регистрация значений изгиба позвоночника, выполняемая одним датчиком деформации, должна осуществляться на участке протяженностью не менее, чем протяженность трех смежных позвонков на контролируемом участке, но не более, чем протяженность однонаправленного изгиба. Технический результат заключается в повышении удобства эксплуатации, увеличении точности измерений и надежности работы устройства с целью увеличения лечебного эффекта, направленного на эффективную тренировку пациента для профилактики и лечения неправильной осанки, а также сагиттальной и/или фронтальной мобильной деформации позвоночника. 2 н. и 16 з.п. ф-лы, 6 ил.
1. Интерактивное устройство коррекции осанки человека, содержащее по крайней мере один оптический датчик деформации, связанный через каналы связи с системой управления и обработки информации и системой индикации результатов обработки информации, и систему крепления, предназначенную для закрепления компонентов устройства на человеке, отличающееся тем, что оптический датчик деформации выполнен гибким в виде продольной пластинки, при этом его длина составляет величину не менее чем протяженность трех смежных позвонков на контролируемом участке позвоночника человека, но не более чем протяженность однонаправленного изгиба туловища или позвоночника человека, а ширина оптического датчика деформации меньше ширины межлопаточного пространства.
2. Устройство по п.1, отличающееся тем, что в качестве системы управления и обработки информации используется мобильный телефон, либо коммуникатор, либо планшетный или стационарный компьютер, либо другое процессорное устройство с соответствующим программным обеспечением.
3. Устройство по п.2, отличающееся тем, что система управления и обработки информации, в качестве которой используется планшетный или стационарный компьютер, либо другое процессорное устройство с соответствующим программным обеспечением, связано с несколькими оптическими датчиками деформации, в том числе расположенными у разных пользователей.
4. Устройство по п.1, отличающееся тем, что система управления и обработки информации включает блок визуализации деформации, возникающей на оптическом датчике деформации.
5. Устройство по п.1, отличающееся тем, что система управления и обработки информации включает блок электронной памяти для регистрации и сохранения показаний, возникающей на оптическом датчике деформации.
6. Устройство по п.1, отличающееся тем, что в качестве системы индикации результатов обработки информации используется мобильный телефон, либо коммуникатор, либо планшетный или стационарный компьютер, либо другое процессорное устройство с соответствующим программным обеспечением.
7. Устройство по п.1, отличающееся тем, что система индикации результатов обработки информации включает оптический, или/и звуковой, или/и электрический, или/и механический, или/и вибрационный источник сигнала.
8. Устройство по п.1, отличающееся тем, что система индикации результатов обработки информации включает электромиостимулятор.
9. Устройство по п.1, отличающееся тем, что в качестве каналов связи используются радио, в том числе стандарта Bluetooth.
10. Устройство по п.1, отличающееся тем, что в качестве системы крепления использованы пояса, ремни, шнуровка, и/или лента Велкро (контактная лента), и/или механические замки.
11. Устройство по п.1, отличающееся тем, что для закрепления компонентов устройства система крепления включает накладные карманы или отделения.
12. Устройство по п.1, отличающееся тем, что для закрепления оптического датчика деформации система крепления содержит пояс в виде бандажа, шейного воротника, корсета, в том числе с наплечными лямками, и/или одежду, например майку, футболку, жилет, топ, спортивный бюстгальтер или аналогичную часть одежды, и/или неинтерактивный корректор осанки.
13. Устройство по п.1, отличающееся тем, что система крепления включает подтяжки, в которые встроен датчик деформации.
14. Устройство по п.1, отличающееся тем, что параллельно сбоку, над и/или под датчиком деформации расположена одна или несколько плоских пружин из металла, и/или полимера, и/или композитного материала.
15. Способ коррекции осанки, заключающийся в том, что на пациенте закрепляются элементы интерактивного устройства коррекции осанки человека, в системе управления и обработки информации, выполняется установка предельно допустимых значений изгиба позвоночника, выбирается вид сигнала оповещения, производится регистрация значений изгиба позвоночника при помощи оптического датчика деформации, сравниваются зарегистрированные значения изгиба позвоночника с предельно допустимыми значениями и, в случае превышения зарегистрированных значений изгибов позвоночника сверх предельно допустимых значений, формируется и подается сигнал оповещения, отличающийся тем, что при закреплении элементов интерактивного устройства коррекции осанки человека оптический датчик деформации устанавливается на месте контролируемого отдела позвоночника и прижимается к нему, при этом плоскость коррекции оцениваемого изгиба позвоночника человека должна быть перпендикулярна к срединной поверхности пластины оптического датчика деформации, а регистрация значений изгиба позвоночника, выполняемая одним датчиком деформации, должна осуществляться на участке протяженностью не менее чем протяженность трех смежных позвонков на контролируемом участке, но не более чем протяженность однонаправленного изгиба.
16. Способ коррекции осанки по п.15, отличающийся тем, что формирование оповещающего сигнала производится с временной задержкой.
17. Способ коррекции осанки по п.15, отличающийся тем, что установка предельно допустимых значений положений позвоночника выполняется вручную или автоматически в соответствии с программой тренировки.
18. Способ коррекции осанки по п.15, отличающийся тем, что данные регистрации и сравнения полученных значений с предельно допустимыми документируются или архивируются в электронном виде.
| ТРЕНАЖЕР-КОРРЕКТОР ОСАНКИ | 2006 |
|
RU2329778C1 |
| ОПТИЧЕСКИЙ ДАТЧИК ДЕФОРМАЦИИ | 2008 |
|
RU2381489C1 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТЕЧЕНИЯ ГАЗА ИЛИ ЖИДКОСТИ В ТРУБАХ | 1926 |
|
SU3536A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 3608541 A, 28.09.1971. | |||

