Способ относится к области определения и анализа действий, повлекших отклонения положения позвоночника относительно оси тела человека и возврата к установленной норме посредством информирования пользователя о недопустимом изменении положения позвоночника и изменении его поведения.
Известно ИНТЕРАКТИВНОЕ УСТРОЙСТВО КОРРЕКЦИИ ОСАНКИ ЧЕЛОВЕКА И СПОСОБ КОРРЕКЦИИ ОСАНКИ [RU2504350C1 опубл. 20.01.2014 г.], содержащее по крайней мере один оптический датчик деформации, связанный через каналы связи с системой управления и обработки информации и системой индикации результатов обработки информации, и систему крепления, предназначенную для закрепления компонентов устройства на человеке, отличающееся тем, что оптический датчик деформации выполнен гибким в виде продольной пластинки, при этом его длина составляет величину не менее чем протяженность трех смежных позвонков на контролируемом участке позвоночника человека, но не более чем протяженность однонаправленного изгиба туловища или позвоночника человека, а ширина оптического датчика деформации меньше ширины межлопаточного пространства.
Способ коррекции осанки, заключающийся в том, что на пациенте закрепляются элементы интерактивного устройства коррекции осанки человека, в системе управления и обработки информации, выполняется установка предельно допустимых значений изгиба позвоночника, выбирается вид сигнала оповещения, производится регистрация значений изгиба позвоночника при помощи оптического датчика деформации, сравниваются зарегистрированные значения изгиба позвоночника с предельно допустимыми значениями и, в случае превышения зарегистрированных значений изгибов позвоночника сверх предельно допустимых значений, формируется и подается сигнал оповещения, отличающийся тем, что при закреплении элементов интерактивного устройства коррекции осанки человека оптический датчик деформации устанавливается на месте контролируемого отдела позвоночника и прижимается к нему, при этом плоскость коррекции оцениваемого изгиба позвоночника человека должна быть перпендикулярна к срединной поверхности пластины оптического датчика деформации, а регистрация значений изгиба позвоночника, выполняемая одним датчиком деформации, должна осуществляться на участке протяженностью не менее чем протяженность трех смежных позвонков на контролируемом участке, но не более чем протяженность однонаправленного изгиба.
Основной технической проблемой прототипа является сложность и размер конструкции, обязательное наличие подтяжек выполняющих роль крепления, которые вызывают дискомфорт пользователя. Еще недостатками является оповещение о изменении положения позвоночника в результате естественных угловых перемещений во время ходьбы.
Наиболее близким по своей технической сущности является СПОСОБ КОРРЕКЦИИ ОСАНКИ [RU2698861C1, опубл. 30.08.2019 г.], включающий закрепление датчика на теле пользователя, фиксацию правильного вертикально ориентированного положения тела пользователя в пространстве, установку углов отклонения от зафиксированного правильного вертикально ориентированного положения тела, сигнализацию для принятия правильного положения, визуализацию параметров отклонения на экране сенсорного устройства, отличающийся тем, что ежедневно устанавливают допустимые углы отклонения от зафиксированного правильного положения тела в пространстве в пределах до 30 градусов в сагиттальной плоскости и во фронтальной плоскости, устанавливают время удержания вертикального правильного положения тела в пространстве от 1 до 60 минут в час и время уведомления об отклонении от допустимых углов отклонения от зафиксированного правильного положения составляет до 180 секунд, при отклонении более чем на 0,5 градуса от правильного положения пользователю подается сигнал для принятия пользователем правильного положения путем переориентации собственного положения тела в пространстве из-за пределов установленных границ отклонения в сагиттальной и фронтальной плоскостях в границы установленных предельно допустимых углов отклонения от зафиксированного правильного положения тела в пространстве, допустимые углы отклонения от зафиксированного правильного положения тела в пространстве ежедневно уменьшают с шагом в 1 градус до 0 градусов в обеих плоскостях с течением времени, а время удержания правильного положения тела в пространстве увеличивают до 60 минут в течение часа, визуализацию параметров отклонения отражают на экране сенсорного устройства во всех плоскостях и проекции вида сверху, при этом в памяти сенсорного устройства накапливают данные результатов корректировки параметров для оценки динамики формирования правильной осанки. Основной технической проблемой прототипа является его применение только для профилактики искривления позвоночника в виду необходимости формирования правильно ориентированной осанки пользователя, что невозможно сделать без посторонней помощи и инструментальной оценки, а также не предусмотрено исключение кратковременных отклонений во время ходьбы или движений вызванных естественной деятельностью пользователя. Еще одним недостатком является сложность установки датчика, а именно он обязательно фиксируется вдоль позвоночника и/или туловища пациента.
Задачей заявленного решения является разработка способа не требующий закрепления датчика непосредственно на теле пользователя, а так же исключающий при мониторинге из учета кратковременные естественные отклонения.
В рамках данного способа под диагностикой следует понимать установление и анализ признаков, характеризующих состояния приводящие к нарушению осанки.
В рамках заявленного решения под пользователем следует понимать носителя устройства, а в качестве исследователя родителя, врача, учителя и в частном случае их как пользователя мобильного приложения.
Технический результат изобретения заключается в обеспечении определения и анализа признаков, характеризующих состояния приводящие к нарушению осанки и коррекции нарушенной осанки испытуемого, исправления отклонения положения позвоночника относительно вертикальной оси тела человека исключение из учета кратковременных естественных отклонений и более комфортный для пользователя.
Способ диагностики и коррекции осанки характеризующийся тем, что на одежде пользователя в частности на плечевом изделии (плечевой одежде) закрепляют устройство, при помощи которого снимают данные.
При диагностике данные полученные устройством накапливаются, передаются на персональное средство связи, анализируются и выявляется временной промежуток в который возникает нарушение осанки. Далее анализируются действия пользователя связанные с выявленным временным промежутком с последующей коррекцией, путем полного и/или частичного изменения действий пользователя. В частном случае исполнения персональное средство связи имеет предустановленное программное обеспечение (приложение).
Способ коррекции осанки дополнительно или как самостоятельная коррекция, например, в процессе диагностики, может быть осуществлен при помощи указанного устройства, а именно, при помощи датчиков устройства реагируют на отклонение от нормы и оповещают пользователя об отклонениях до момента исправления положения до установленной нормы, при этом распознают и исключают отклонения при ходьбе, беге, езде на велосипеде и т.д.
Для осуществления способа используют устройство для коррекции осанки (1) фиг. 1 содержащее корпус, во внутреннем пространстве которого расположены блок управления и обработки информации с подключенными к нему: датчиком положения, датчиком деформации положения, модулем памяти, блоком оповещения, блоком вибрации и источником питания. В частном случае исполнения по любому из вариантов дополнен модулем связи. Датчик деформации позвоночника выполнен с возможностью регистрации и измерения угла наклона, например, виде одно-, двух- или трехосевого инклинометра. Датчик положения выполнен с возможностью регистрации горизонтального и вертикального перемещения пользователя, например, в виде акселерометра. Модуль памяти выполнен с возможностью записи, хранения, приема и передачи информации на блок управления. В частном случае исполнения выполненный с возможностью установки энергонезависимого хранилища. В частотном случае исполнения, блок вибрации выполнен в виде зуммера, например, электромагнитного. Модуль связи выполнен с возможностью подключения к интерфейсу на персональном средстве связи (2). В частотном случае исполнения, блок оповещения выполнен в виде звукового извещателя. В варианте исполнения, устройство (1) имеет управляющую панель с дисплеем на наружной поверхности корпуса, и установленный интерфейс. В частном случае исполнения устройство по любому варианту исполнения может быть дополнен управляющими кнопками. Интерфейс по любому варианту исполнения устанавливается на персональное средство связи в виде смартфона, планшета, персонального компьютера. Для питания устройства по любому варианту исполнения внутри корпуса предусмотрен перезаряжаемый источник питания с разъемом (1.1) для подключения зарядного устройства. Для включения и выключения устройства по любому варианту исполнения устройство имеет кнопку (1.2) включения и отключения питания в частном случае исполнения со световым индикатором питания. В частном случае по любому варианту, для контроля сопряжения устройства с интерфейсом на одной из его сторон предусмотрен световой индикатор контроля сопряжения. В частном случае по любому варианту исполнения устройство имеет элемент крепления, например, контактную ленту (велкро), кнопку(и), пин, магнитный держатель и т.д. В частном случае исполнения по любому варианту исполнения устройство укомплектован карманом по размеру, закрепляемым на элемент одежды. В качестве закрепления на элемент одежды может быть использовано клеевое соединение, контактное (велкро), машинное, сварное, термослой, магнитное. В частном случае исполнения по любому варианту исполнения устройство имеет корпус изогнутой формы повторяющий естественный изгиб спины пользователя. В качестве элемента одежды для закрепления устройства может быть использован любой элемент одежды одеваемый на тело пользователя, например, майка, футболка, жилет, блуза, рубашка, корсет, сарафан, пиджак, кофта, свитер, свитшот и любое плечевое изделие (школьная форма). Предпочтительное выполнение устройства размером не превышающем габаритные размеры 50×30×8 мм. Устройство малозаметно под одеждой, не создает помех при движении и в быту.
Устройство размещают и закрепляют на предмете плечевой одежды (2) фиг. 1 на спинке, предпочтительно в районе лопаток и предпочтительно с изнанки. В частном случае исполнения устройство размещают в кармане (2.1) фиг. 1 который закреплен или закрепляют на предмете одежды. Предпочтительно, чтобы устройство располагалось по вертикальной оси позвоночника пользователя на уровне грудного отдела.
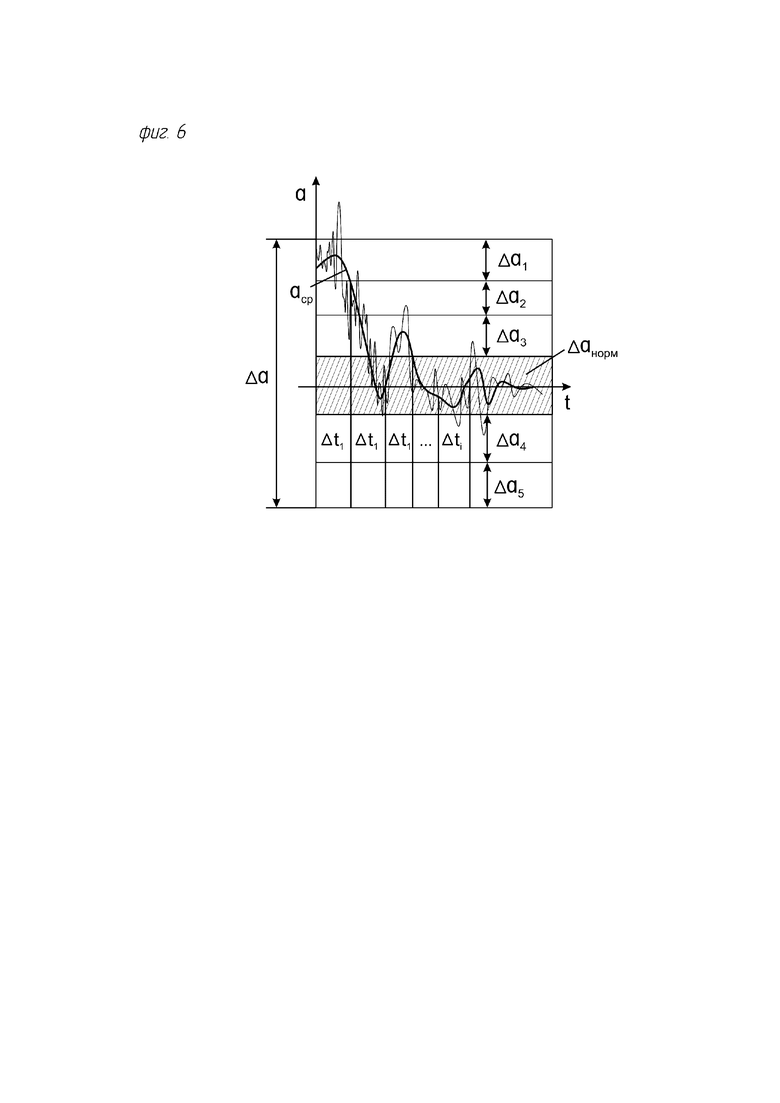
Далее на устройстве устанавливают необходимый уровень чувствительности для чего устанавливают период измерений Δti, в котором учитывают отклонения датчиков положения на угол α.
Также задают предел угла отклонения где Δαi - допустимый интервал отклонения датчика положения на i-том уровне, который также задают при настройке устройства.
При отклонении пользователя от вертикальной оси в любую из сторон устройством с помощью датчика положения фиксируют величину угла перемещения и передают об этом информацию на блок управления и обработки информации устройства.
При этом по результатам каждого отклонения за период времени Δti вычисляют среднее значение угла отклонения αcp и тем самым исключают кратковременные превышения допустимого угла отклонения αi вызванные естественными перемещениями в процессе деятельности.
В блоке управления и обработки информации полученные результаты среднего угла отклонения αср за период времени Δti сравнивают с максимальными значениями угла отклонения допустимого интервала отклонения Δαi. При превышении среднего угла отклонения αср максимального угла отклонения допустимого интервала Δαi блок управления и обработки информации передает сигнал на включение блока извещения.
Пользователь, получая сигнал, корректирует положение тела до достижения средним углом отклонения αср верхней границы допустимого интервала Δαi. После чего с блока управления и обработки информации передают сигнал на блок извещения для его отключения.
При достижении средним значением угла отклонения αcp следующего уровня с допустимым интервалом отклонения Δαi+1, в котором максимальный угол отклонения равен нижней границе предыдущего допустимого интервала отклонения, его верхнюю границу принимают как за максимальный угол отклонения и повторяют замеры и корректировку до достижения следующего уровня.
Корректировку положения позвоночника продолжают до достижения допустимого нормального интервала отклонения Δαнорм.
Для возможности сбора статистических данных все сигналы, передаваемые с датчика измерения угла наклона записывают в модуль памяти.
В варианте исполнения далее используя программное обеспечение, установленное на интерфейсе персонального устройства связи, производят его сопряжение с устройством, при этом в частном случае исполнения о сопряжении устройства с интерфейсом сигнализирует световой индикатор контроля сопряжения.
При этом записанные данные передают в интерфейс при каждом его сопряжении с устройством. Во время перемещения пользователя, например, при ходьбе или беге, один из датчиков положения выполненный в виде акселерометра фиксирует перемещение и передает информацию об этом в блок управления и обработки информации, который, в свою очередь, отключает работу второго датчика положения выполненного в виде инклинометра. Таким образом исключают измерение углов отклонения позвоночника во время ходьбы. Указанный технический результат обеспечение коррекции нарушенной осанки заключается за счет формирования уровней предельного отклонения позвоночника Δαi при которых нижняя граница предыдущего уровня является верхней границей последующего уровня Δαi+i стремящегося к уровню с нормальным отклонением Δαнорм.
Указанный технический результат исключение из учета кратковременных естественных отклонений достигается за счет вычисления среднее значение угла отклонения αср за период времени Δti и исключения из учета кратковременных отклонений.
Краткое описание чертежей.
Фиг. 1 схематичное изображение варианта размещения устройства для коррекции осанки на одежде в карман.
Фиг. 2 показана работа устройства для коррекции осанки в правильном положении пользователя. Фиг. 3 показана работа устройства для коррекции осанки в отклоненном вперед положении пользователя от правильного.
Фиг. 4 показана работа устройства для коррекции осанки в правильном положении пользователя.
Фиг. 5 показана работа устройства для коррекции осанки в отклоненном в бок положении пользователя от правильного.
Фиг. 6 показаны эпюры, поясняющие реализацию способа предупреждения и коррекции нарушения осанки.
Краткое описание конструктивных элементов.
1 - устройство;
1.1 - разъем;
1.2 - кнопка включения/выключения;
2 - предмет одежды;
2.1 - карман;
3 - персональное устройство связи;
4 - пользователь;
5 - ось правильного положения;
5.1 - ось отклонения.
Осуществление заявленного решения
Способ диагностики и коррекции осанки осуществляется следующим образом на одежде пользователя (школьная, спортивная формы и повседневная одежа) в частности на плечевом изделии закрепляют устройство, на котором устанавливают углы отклонения положения пользователя от нормы. При помощи устройства снимают данные отклонения положения пользователя от нормы. Полученные устройством данные об отклонениях накапливают и передают на персональное средство связи пользователя с установленным программным обеспечением (приложением). Далее их анализируют и выявляют, например, временной промежуток в который возникает нарушение осанки. Далее анализируются действия пользователя связанные с выявленным временным промежутком, например, значительное отклонение положения пользователя связано по времени с длительным прибыванием в сидячем положении (на уроке) или после того как пользователь одел рюкзак или сумку. После выявления коррелируют действия повлекшие отклонение от нормы, путем полного и/или частичного изменения действий пользователя. Например, меняют рюкзак на другой, или распределяют более равномерно нагрузку. Если отклонения связаны с длительным прибыванием в сидячем положении (на уроке), корректируют, предметы мебели, сокращают или разбивают время в сидячем положении, например, разминкой. Так же осуществляют применение профилактических мероприятий по предупреждению сколиоза, например, как своевременный поход к ортопеду, назначение лечебной физкультуры и т.д. Дополнительно в вариантах исполнения способа при помощи устройства при отклонении от установленного положения сигнализируют пользователю об этом, он корректирует положение до нормы.
Первоначально для включения устройства (1) фиг. 1 нажимают кнопку включения/выключения (1.2) и тем самым подают питание на блок управления. В частном случае исполнения включение устройства контролируют включением светового индикатора питания (на фигурах не показан).
В варианте исполнения, используя программное обеспечение, установленное на пользовательском интерфейсе персонального устройства связи, производят его сопряжение с устройством, при этом в частном случае исполнения о сопряжении устройства с пользовательским интерфейсом сигнализирует световой индикатор контроля сопряжения.
Далее устройство размещают и закрепляют на элементе одежды (2) фиг. 1-5 на спинке, предпочтительно в районе лопаток и предпочтительно с изнанки. В частном случае исполнения устройство размещают в кармане (2.1) фиг. 1, который закреплен или закрепляют на элементе одежды. Предпочтительно, чтобы устройство располагалось по вертикальной оси позвоночника пользователя на уровне грудного отдела.
Далее устанавливают необходимый уровень чувствительности, для чего устанавливают период измерений Δti, в котором учитывают отклонения датчиков положения на угол α.
Также задают предел угла отклонения. Где Δαi - допустимый интервал отклонения датчика положения на i-том уровне, который также задают при настройке устройства фиг. 6.
При отклонении пользователя от вертикальной оси в любую из сторон фиг. 2-5 с помощью датчика положения фиксируют величину угла перемещения и передают об этом информацию на блок управления и обработки информации.
При этом по результатам каждого отклонения за период времени Δti вычисляют среднее значение угла отклонения αcp и тем самым исключают кратковременные превышения допустимого угла отклонения α, вызванные естественными перемещениями в процессе деятельности фиг. 6.
В блоке управления и обработки информации полученные результаты среднего угла отклонения αcp за период времени Δti, сравнивают с максимальными значениями угла отклонения допустимого интервала отклонения Δαi. При превышении среднего угла отклонения αср максимального угла отклонения допустимого интервала Δαi блок управления и обработки информации передает сигнал на включение блока вибрации.
При этом пользователь, ощущает вибрацию фиг. 3, 5 и корректирует положение тела до достижения среднего угла отклонения αср верхней границы допустимого интервала Δαi фиг. 2, 4.
После чего с блока управления и обработки информации передают сигнал на блок вибрации для его отключения.
При достижении средним значением угла отклонения αcp следующего уровня с допустимым интервалом отклонения Δαi+1, в котором максимальный угол отклонения равен нижней границе предыдущего допустимого интервала отклонения, его верхнюю границу принимают как за максимальный угол отклонения и повторяют замеры и корректировку до достижения следующего уровня. Корректировку положения позвоночника продолжают до достижения допустимого нормального интервала отклонения Δαнорм фиг.6.
Для возможности сбора статистических данных все сигналы передаваемые с датчика измерения угла наклона записывают в модуль памяти.
При этом в варианте исполнения записанные данные передают в пользовательский интерфейс при каждом его сопряжении с устройством.
Указанный технический результат обеспечение измерений вертикальных отклонений позвоночника во время статического положения пользователя без выключения устройства достигается за счет наличия по меньшей мере двух датчиков положения при этом один из датчиков положения выполнен в виде акселерометра который во время перемещения пользователя, например, при ходьбе или беге фиксирует перемещение и передает информацию об этом в блок управления и обработки информации, который, в свою очередь, отключает работу второго датчика положения выполненного в виде инклинометра. Таким образом исключают измерение углов отклонения позвоночника во время ходьбы.


Группа изобретений относится к области медицины, а именно к ортопедии. Способ определения и анализа действий, повлекших отклонения положения позвоночника относительно вертикальной оси тела человека включает закрепление устройства коррекции осанки на одежде и установку предельных значений углов отклонения позвоночника от вертикальной оси и формирование уровней предельного отклонения позвоночника. Средние значения углов отклонения позвоночника анализируют и сравнивают с максимальными значениями допустимого интервала отклонения. При превышении сигнализируют до возврата позвоночника в допустимый интервал отклонения. Далее корректируют действия пользователя, приводящие к нарушению осанки. Способ исправления отклонения положения позвоночника относительно вертикальной оси тела человека включает следующее. С помощью датчика положения фиксируют величину угла перемещения. На устройстве формируют уровни предельного отклонения позвоночника и устанавливают период измерений. Вычисляют среднее значение угла отклонения и полученный результат сравнивают с максимальными значениями допустимого интервала отклонения. При превышении средним значением угла отклонения максимального значения допустимого интервала включают блок извещения, корректируют положение тела и отключают сигнализацию. Достигается определение и анализ признаков, характеризующих состояния, приводящие к нарушению осанки, коррекция нарушенной осанки, исправление отклонения положения позвоночника относительно вертикальной оси тела человека без учета кратковременных отклонений. 2 н. и 8 з.п. ф-лы, 6 ил.
1. Способ определения и анализа действий, повлекших отклонения положения позвоночника относительно вертикальной оси тела человека, включающий закрепление устройства коррекции осанки, содержащего датчик измерения угла наклона и акселерометр, на одежде пользователя, установку на устройстве предельных значений углов отклонения позвоночника пользователя от вертикальной оси, съем, фиксацию и передачу значений углов отклонений позвоночника пользователя от вертикальной оси, анализ, сравнение средних значений углов отклонений позвоночника пользователя от вертикальной оси с максимальными значениями угла отклонения допустимого интервала отклонения, подачу сигнала при обнаружении превышения за установленный период времени средним значением угла отклонения позвоночника пользователя максимального значения угла отклонения допустимого интервала отклонения до возврата позвоночника пользователя в допустимый интервал отклонений, запись сигналов, передаваемых с датчика измерения угла наклона, отличающийся тем, что на устройстве формируют уровни предельного отклонения позвоночника, при которых нижняя граница предыдущего уровня является верхней границей последующего уровня, стремящегося к уровню с установленным нормальным отклонением, осуществляют корректировку действий пользователя, приводящих к нарушению осанки, путем полного и/или частичного изменения действий пользователя, записанные данные передают в пользовательский интерфейс при каждом его сопряжении с устройством коррекции осанки.
2. Способ исправления отклонения положения позвоночника относительно вертикальной оси тела человека, включающий закрепление устройства коррекции осанки, содержащего датчик измерения угла наклона и акселерометр, на одежде пользователя, установку на устройстве предельных значений углов отклонения позвоночника пользователя от вертикальной оси, сигнализацию для принятия пользователем вертикального положения, с помощью датчика положения устройства фиксируют величину угла перемещения и передают об этом информацию на блок управления и обработки информации устройства, отличающийся тем, что на устройстве формируют уровни предельного отклонения позвоночника, при которых нижняя граница предыдущего уровня является верхней границей последующего уровня, стремящегося к уровню с установленным нормальным отклонением, устанавливают период измерений, по результатам каждого отклонения за установленный период времени вычисляют среднее значение угла отклонения, полученный результат сравнивают с максимальными значениями угла отклонения допустимого интервала отклонения, при превышении средним значением угла отклонения максимального значения угла отклонения допустимого интервала, через блок управления и обработки информации включают блок извещения, получая сигнал от блока извещения, корректируют положение тела до достижения средним значением угла отклонения верхней границы допустимого интервала и отключают сигнализацию.
3. Способ по п. 2, отличающийся тем, что при достижении средним значением угла отклонения уровня с допустимым интервалом отклонения, в котором максимальное значение угла отклонения равно нижней границе предыдущего допустимого интервала отклонения, его верхнюю границу принимают за максимальное значение угла отклонения и повторяют замеры и корректировку до достижения следующего уровня.
4. Способ по п. 2, отличающийся тем, что все сигналы, передаваемые с датчика измерения угла наклона, записывают в модуль памяти.
5. Способ по п. 4, отличающийся тем, что записанные данные передают в пользовательский интерфейс при каждом его сопряжении с устройством.
6. Способ по п. 2, отличающийся тем, что зафиксированные отклонения анализируют и выявляют признаки, характеризующие состояния пользователя, приводящие к нарушению осанки и их корректировку путем полного и/или частичного изменения действий пользователя.
7. Способ по п. 2, отличающийся тем, что извещают звуковым сигналом.
8. Способ по п. 2, отличающийся тем, что контактируют с устройством через управляющую панель с дисплеем на наружной поверхности корпуса, и установленный пользовательский интерфейс.
9. Способ по п. 2 или 8, отличающийся тем, что контактируют с устройством через управляющие кнопки.
10. Способ по п. 2, отличающийся тем, что устройство закрепляют при помощи кармана, или контактной лентой велкро или через кнопку, или через кнопки, или через пин, или через магнитный держатель.
| US 2011063114 A1, 17.03.2011 | |||
| ИНТЕРАКТИВНОЕ УСТРОЙСТВО КОРРЕКЦИИ ОСАНКИ ЧЕЛОВЕКА И СПОСОБ КОРРЕКЦИИ ОСАНКИ | 2012 |
|
RU2504350C1 |
| WO 2006093734 A2, 08.09.2006 | |||
| US 2020186908 A1, 01.06.2020 | |||
| US 9936900 B2, 10.04.2018 | |||
| СПОСОБ КОРРЕКЦИИ ОСАНКИ | 2018 |
|
RU2698861C1 |
| US 9763603 B2, 19.09.2017. | |||

