Изобретение относится к области авиации, а именно к летательным аппаратам вертикального взлета и посадки.
Известен летательный аппарат вертикального взлета и посадки (Патент РФ №2435707, В64С 29/00, 2011 г.), содержащий корпус обтекаемой формы, по меньшей мере, одно крыло, выполненное в виде кольца, расположенное внутри и/или снаружи корпуса, внутри корпуса расположены маховик в виде полого диска, снабженный клапанами дистанционного управления, силовая установка, состоящая, по меньшей мере, из одного двигателя и, по меньшей мере, из одного вентиляторного устройства или турбовентиляторного двигателя и эжекторного устройства, система управления, состоящая из рулей управления по направлению, по вектору тяги, по крену и тангажу, выполненных в виде профилированных колец и расположенных симметрично относительно друг друга и оси корпуса.
Недостатком данной конструкции является то, что рули управления имеют сложный механический привод и работают в скоростном высоконапорном потоке, что может приводить к их частым отказам и выходу из строя. Можно отметить нерациональное использование объема летательного аппарата, так как большая его часть занята устройствами и каналами, предназначенными для ориентации летательного аппарата в пространстве.
Известен многофункциональный высокоманевренный летательный аппарат вертикального взлета и посадки (Патент РФ №2127693, В64С 29/00, 1999 г.), содержащий корпус дискообразной формы, имеющий полости, заполняемые несущим газом, и грузовые отсеки, силовую установку, переднюю кабину экипажа, систему управления и органы приземления, снабженный задней кабиной экипажа, эластичными убирающимися емкостями для несущего газа, корпус образован тором, верхней выпуклой и нижней вогнутой несущими поверхностями, закрывающими центральную полость, расположенную внутри тора, который выполнен с радиальными нишами, при этом отношение расстояния от центра окружности, образующей поверхность тора, до вертикальной оси тора составляет не менее трех радиусов указанной окружности, силовая установка включает не менее шести автономных взаимозаменяемых установленных на подшипниковых опорах энергоблоков, каждый из которых имеет два реактивных двигателя, выполненных с возможностью реверса тяги и установленных на поворотных платформах, емкости для топлива, систему дифференцированного управления режимами двигателей, а также положением энергоблока относительно указанного корпуса и платформы с указанными двигателями относительно энергоблока, при этом органы приземления выполнены в виде выдвижных автоматически фиксируемых телескопических штанг.
Недостатком данной конструкции является наличие механически поворачиваемых платформ, на которых установлены двигатели, изменяющие положение относительно платформ, что ведет к необходимости использования очень сложных приводных механизмов и устройств управления полетом и, как следствие, сложное согласование и синхронизирование работы всех двигателей.
Известен летательный аппарат (Патент СССР №1838180, В64С 29/00, 1993 г.). Летательный аппарат содержит два соосных вращающихся от одного привода в противоположных направлениях несущих винта, расположенных концентрично внутри корпуса, имеющего внешнюю форму, выполненную в виде создающего подъемную силу кольцевого крыла, корпус имеет управляемые воздухопроводы с ламелями, установленными в зоне выхода струи от несущих винтов с возможностью изменения угла установки, и складывающееся шасси, отличается тем, что с целью улучшения летно-технических характеристик кабина размещена в центре корпуса в зоне его центра масс, привод установлен в отсеке кабины, несущие винты расположены по внешнюю сторону кабины до кольцевой внешней части в зоне воздухопровода, разделенного на секторы посредством проходящих радиально силовых балок, соединяющих корпус с кольцевой внешней частью, при этом ламели установлены на силовых балках, зона воздуховодов разделена по крайней мере на двенадцать секторов, каждый из которых охватывает около 30°. Ламели установлены в секторах с возможностью их поворота в различных направлениях.
Недостатком этой конструкции является сложный механический привод ламелей и необходимость в большом количестве электроники и датчиков для управления каждой ламелью в отдельности, что негативно сказывается на надежности всего устройства в целом.
Также известен летательный аппарат и способ управления им (Патент РФ №2062246, МПК В64С 29/00, 1996 г.),принятый в качестве прототипа. Летательный аппарат содержит тороидальный фюзеляж, концентричный относительно оси, два вращающихся в противоположные стороны несущих винта, расположенных внутри канала винтов, определенного указанным тороидальным фюзеляжем для вращения вокруг оси вращения, которая совпадает с осью фюзеляжа, и средства для полного управления перемещением летательного аппарата: средство управления дифференциальным общим шагом для управления летательным аппаратом по рысканию, средства для приложения равного общего шага к каждому несущему винту, средства для приложения циклического шага к несущим винтам.
Недостатком указанного технического решения является необходимость наличия сложной системы распределения и направления газодинамических потоков, предполагающей большое количество задвижек и направляющих, имеющих сложный механический привод, что уменьшает надежность летательного аппарата.
Технический результат заключается в создании летательного аппарата вертикального взлета и посадки с простым управлением.
Технический результат достигается тем, что летательный аппарат вертикального взлета и посадки, имеющий дискообразный или тороидальный фюзеляж с двигательным устройством, ось которого совпадает с осью фюзеляжа, расположенным внутри канала, образованного фюзеляжем или выше фюзеляжа, содержит герметичный тороидальный резервуар, установленный внутри фюзеляжа по периферии, заполненный жидкой средой, минимум две пары симметричных тяговых устройств, расположенных равномерно по длине резервуара, выполненных в виде гидроцилиндров или тяговых электромагнитов, при этом точка приложения тяговой силы двигательного устройства расположена выше центра масс летательного аппарата. Герметичный тороидальный резервуар может быть выполнен из эластичного материала, а тяговые устройства расположены внутри канала, образованного тороидальным резервуаром, и взаимодействуют с боковой внутренней поверхностью тороидального резервуара. Герметичный тороидальный резервуар может быть выполнен в виде кольцевого канала прямоугольного сечения с боковыми стенками в виде сильфона и горизонтальными плоскими верхней и нижней поверхностями, выполненными в виде колец, а тяговые устройства расположены над резервуаром и взаимодействуют с верхней поверхностью резервуара, при этом верхняя поверхность резервуара имеет возможность изменения угла наклона.
Во втором варианте исполнения летательный аппарат вертикального взлета и посадки, имеющий дискообразный или тороидальный фюзеляж с двигательным устройством, ось которого совпадает с осью фюзеляжа, расположенным внутри канала, образованного фюзеляжем или выше фюзеляжа, содержит установленный внутри фюзеляжа по периферии герметичный тороидальный резервуар, выполненный в виде кольцевого канала прямоугольного сечения с жесткими немагнитными стенками, частично заполненный магнитной жидкостью, с возможностью ее свободного перетекания, минимум две пары симметричных электромагнитов, расположенных равномерно по длины резервуара, с полюсами, охватывающими резервуар по боковым стенкам, минимум две пары симметричных постоянных магнитов, установленных под дном и/или по бокам резервуара, при этом точка приложения тяговой силы двигательного устройства расположена выше центра масс летательного аппарата.
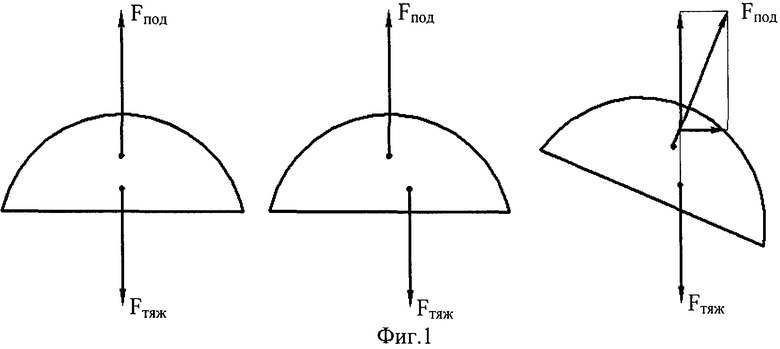
Заявленный технический результат достигается тем, что после взлета и зависания летательного аппарата производят перераспределение жидкой среды в герметичном тороидальном резервуаре, смещая центр масс летательного аппарата с линии приложения подъемной силы двигателя (фиг.1), в результате чего сила тяжести и подъемная сила, действующие на летательный аппарат, создают пару сил, момент которой вызывает крен корпуса до тех пор, пока вертикальная линия, проходящая через центр масс летательного аппарата, не пересечется с линией, совпадающей с вектором подъемной силы двигателя. В этом положении вектор подъемной силы двигателя раскладывается на две составляющие, одна из которых направлена вертикально вверх и компенсирует силу тяжести, а вторая направлена в сторону крена летательного аппарата и приводит его в горизонтальное поступательное движение в направлении крена. В зависимости от соотношения вертикально направленной составляющей подъемной силы и силы тяжести, действующей на летательный аппарат, он может набирать, сбрасывать высоту и, в случае если эти две силы уравновешивают друг друга, сохранять высоту полета неизменной.
Сущность изобретения поясняется следующими чертежами.
На фиг.1 изображены векторы сил, действующие на летательный аппарат вертикального взлета и посадки с дискообразным фюзеляжем при разных положениях центра масс аппарата.
На фиг.2 изображен принципиальный вид летательного аппарата с указанием места положения герметичного тороидального резервуара и с указанием места положения кольцевого канала прямоугольного сечения для управления положением центра масс аппарата.
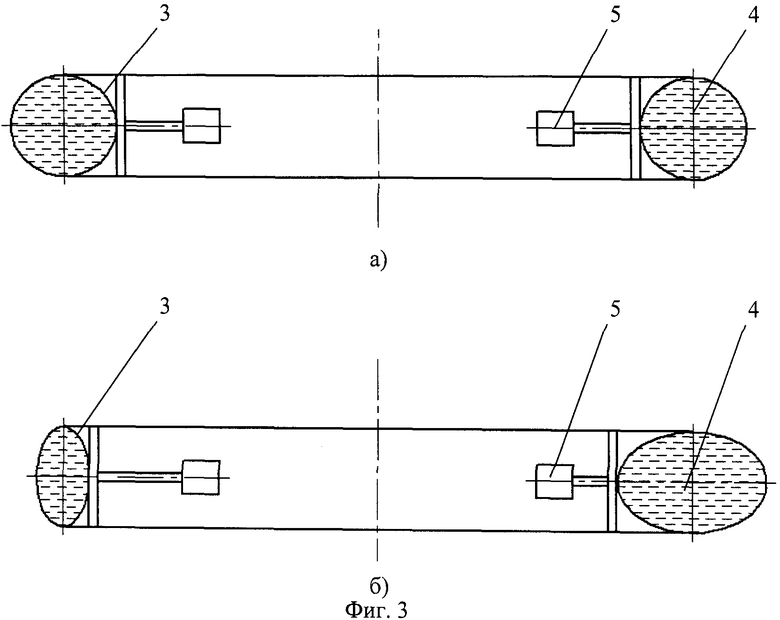
На фиг.3 приведена принципиальная схема управления положением центра масс летательного аппарата вертикального взлета и посадки с помощью деформации герметичного тороидального резервуара с эластичными стенками, полностью заполненного жидкой средой.
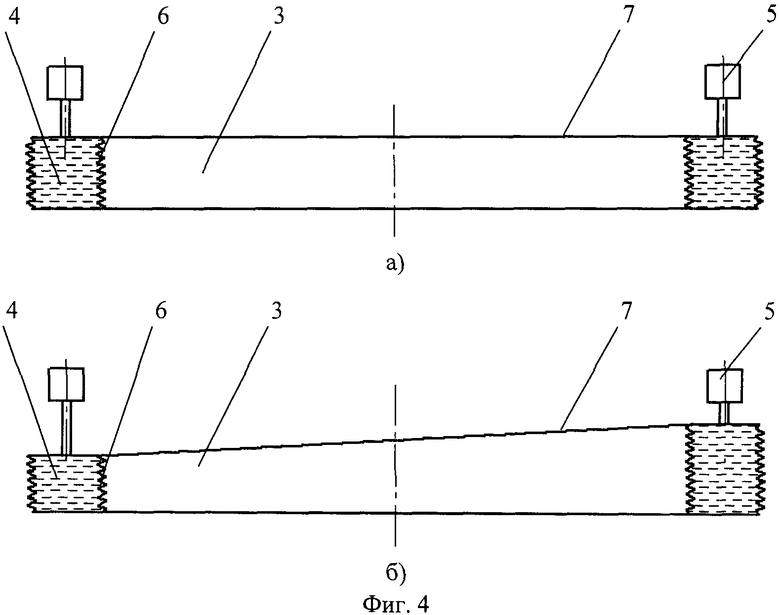
На фиг.4 приведена принципиальная схема управления положением центра масс летательного аппарата вертикального взлета ипосадки с помощью деформации полностью заполненного жидкой средой герметичного тороидального резервуара, выполненного в виде кольцевого канала с боковыми стенками в виде сильфона.
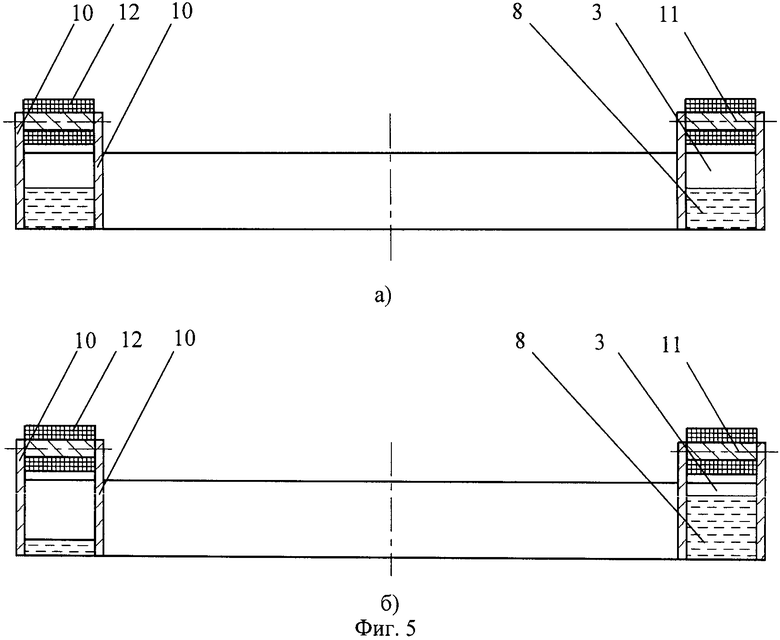
На фиг.5 показана принципиальная схема управления положением центра масс летательного аппарата вертикального взлета и посадки с помощью перемещения по герметичному тороидальному резервуару магнитной жидкости, находящейся под действием управляемого магнитного поля.
Летательный аппарат вертикального взлета и посадки по первому варианту исполнения, принципиальный вид которого показан на фиг.2, состоит из фюзеляжа 1, двигательного устройства 2, например, вертолетного (фиг.2,а) или вентиляторного, реактивного (фиг.2,б) действия и размещенного по периферии фюзеляжа герметичного тороидального резервуара 3, заполненного жидкой средой 4.
На фиг.3 показана принципиальная схема управления положением центра масс летательного аппарата, состоящая из герметичного тороидального резервуара 3, выполненного из эластичного материала, полностью заполненного жидкой средой 4. Тяговые устройства 5 установлены в пространстве, ограниченном герметичным тороидальным резервуаром и взаимодействуют с боковой внутренней поверхностью герметичного тороидального резервуара 3.
На фиг.4 показана принципиальная схема управления положением центра масс летательного аппарата состоящая из герметичного тороидального резервуара 3 выполненного в виде кольцевого канала прямоугольного сечения с боковыми стенками 6 в виде сильфона, полностью заполненного жидкой средой 4. У герметичного тороидального резервуара верхняя плоская поверхность 7 выполнена в форме кольца и имеет возможность вертикального перемещения под действием вертикальных усилий, развиваемых тяговыми устройствами 5, равномерно распределенными сверху по всей длине герметичного тороидального резервуара 3. В каждой паре диаметрально расположенные тяговые устройства действуют в противофазе - с одной стороны сжимают боковые стенки 6, а с диаметрально противоположной стороны растягивают их или не препятствуют их растяжению. При подаче сигнала управления жидкая среда 4 из первоначального положения, показанного на фиг.4,а перемещается в положение, показанное на фиг.4,б, изменяя положение центра масс летательного аппарата.
Летательный аппарат вертикального взлета и посадки по второму варианту исполнения состоит из фюзеляжа 1, двигательного устройства 2 вертолетного (фиг.2,а) или вентиляторного, реактивного (фиг.2,б) действия, и размещенного по периферии фюзеляжа герметичного тороидального резервуара 3, заполненного магнитной жидкостью 8 (фиг.5). На фиг.5 показана принципиальная схема изменения положения центра масс летательного аппарата, состоящая из герметичного тороидального резервуара 3 с жесткими немагнитными стенками, выполненного в виде кольцевого канала прямоугольного сечения и частично заполненного магнитной жидкостью 8. Герметичный тороидальный резервуар 3 снабжен минимум двумя парами электромагнитов, состоящих из полюсов 10, ферромагнитных сердечников 11 и катушек управления 12, равномерно распределенными по всей длине герметичного тороидального резервуара. Минимум две пары симметричных постоянных магнитов установленны под дном и/или по бокам герметичного тороидального резервуара 3.
Летательный аппарат вертикального взлета и посадки по первому варианту исполнения работает следующим образом.
При отсутствии управляющего воздействия жидкая среда 4 внутри герметичного тороидального резервуара 3 распределена равномерно по длине его большой окружности (фиг.3,а). Перемещение жидкой среды 4 внутри герметичного тороидального резервуара 3 осуществляется путем сжатия его с одной стороны, при приложении к нему сторонней силы от тяговых устройств 5, которые равномерно распределены по окружности герметичного тороидального резервуара и могут быть гидроцилиндрами, тяговыми электромагнитами и т.п. устройствами, и его расширения с диаметрально противоположной стороны под действием возникающего в жидкой среде 4 давления на эластичные стенки герметичного тороидального резервуара 3 (фиг.3,б, 4,б). Количество тяговых устройств должно быть не менее четырех и определяется необходимой точностью регулирования и скоростью изменения направления полета.
Летательный аппарат вертикального взлета и посадки по второму варианту исполнения работает следующим образом.
При отсутствии напряжения в катушках управления 12 магнитная жидкость 8 равномерно распределена по длине герметичного тороидального резервуара 3 (фиг.5,а). После подачи напряжения на катушку или несколько катушек управления 12 (фиг.5,б) в области расположения этих катушек между полюсами 10 возникает магнитное поле. Магнитная жидкость 8 перемещается, втягиваясь в область с большей напряженностью магнитного поля, и изменяет положение центра масс летательного аппарата.
Для перемещения только необходимого количества магнитной жидкости 8 и предотвращения отекания всей жидкости в сторону крена летательного аппарата необходима подача напряжения на все катушки управления 12.
Изменение положения центра масс летательного аппарата возможно несколькими способами: путем увеличения тока в одной или нескольких рядом расположенных катушках управления 12 и уменьшения тока в диаметрально противоположных катушках управления 12; путем увеличения тока в одной или нескольких рядом расположенных катушках управления 12 с одной стороны; путем уменьшения тока в одной или нескольких рядом расположенных катушках управления 12. При необходимости могут быть реализованы и другие схемы изменения токов в катушках управления 12.
Возможно регулирование положения магнитной жидкости 8 за счет увеличения тока в одной катушке управления 12 и его ослабления в соседних катушках управления 12. При этом магнитная жидкость 8 от катушек управления 12 с пониженным током будет втягиваться в область действия катушки управления 12 с повышенным током при сохранении практически неизменными объемов магнитной жидкости, удерживаемыми остальными катушками управления 12.
Удержание магнитной жидкости 8 и предотвращение ее полного стекания при крене летательного аппарата можно также осуществить при помощи постоянных магнитов, размещенных под дном или в других местах около герметичного тороидального резервуара 3 и удерживающих магнитную жидкость своими магнитными полями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2503589C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ АВАРИЙНО-СПАСАТЕЛЬНЫЙ | 2007 |
|
RU2337855C1 |
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2004 |
|
RU2272751C1 |
| Многоразовая космическая система и способ ее управления | 2019 |
|
RU2717406C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2014 |
|
RU2546385C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЮЗЕЛЯЖЕМ, ВЫПОЛНЕННЫМ ПО СУЩЕСТВУ В ВИДЕ АЭРОСТАТИЧЕСКОГО ПОДЪЕМНОГО ТЕЛА, ДВИГАТЕЛЬНАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2196703C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2605466C1 |
| САМОЛЕТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2012 |
|
RU2490173C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| РЕАКТИВНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ НАД ПОВЕРХНОСТЬЮ ВОДЫ С УКОРОЧЕННЫМ ЛИБО ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2016 |
|
RU2712479C1 |
Изобретение относится к области авиации, в частности к летательным аппаратам вертикального взлета и посадки. В первом варианте летательный аппарат вертикального взлета и посадки имеет дискообразный или тороидальный фюзеляж с двигательным устройством, ось которого совпадает с осью фюзеляжа, расположенным внутри канала, образованного фюзеляжем или выше фюзеляжа. Фюзеляж содержит герметичный тороидальный резервуар, установленный внутри по периферии, заполненный жидкой средой, минимум две пары симметричных тяговых устройств, расположенных равномерно по длины резервуара, выполненных в виде гидроцилиндров или тяговых электромагнитов. Точка приложения тяговой силы двигательного устройства расположена выше центра масс летательного аппарата. Во втором варианте летательный аппарат содержит герметичный резервуар, выполненный в виде кольцевого канала прямоугольного сечения, частично заполненный магнитной жидкостью, по меньшей мере, две пары симметрично расположенных электромагнитов, охватывающих резервуар по боковым стенкам, и две пары постоянных магнитов, установленных симметрично под дном и/или по боковым стенкам резервуара. Достигается упрощение системы управления летательным аппаратом. 2 н.и 2 з.п. ф-лы, 5 ил.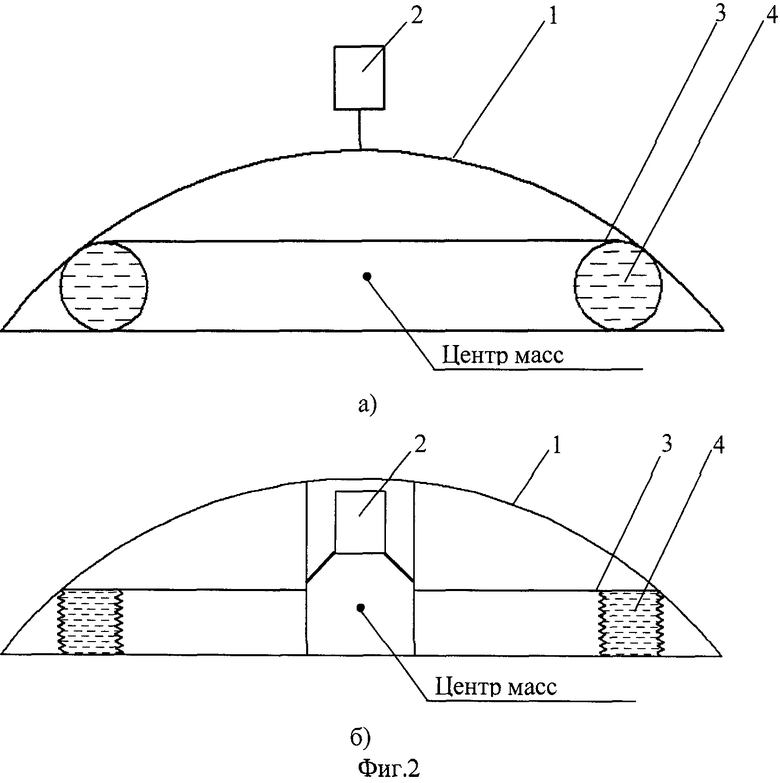
1. Летательный аппарат вертикального взлета и посадки, имеющий дискообразный или тороидальный фюзеляж с двигательным устройством, ось которого совпадает с осью фюзеляжа, расположенным внутри канала, образованного фюзеляжем или выше фюзеляжа, отличающийся тем, что содержит герметичный тороидальный резервуар, установленный внутри фюзеляжа по периферии, заполненный жидкой средой, минимум две пары симметричных тяговых устройств, расположенных равномерно по длине тороидального герметичного резервуара, выполненных в виде гидроцилиндров или тяговых электромагнитов, при этом точка приложения тяговой силы двигательного устройства расположена выше центра масс летательного аппарата.
2. Летательный аппарат по п.1, отличающийся тем, что герметичный тороидальный резервуар выполнен из эластичного материала, а тяговые устройства расположены внутри пространства, ограниченного тороидальным герметичным резервуаром и взаимодействуют с боковой внутренней поверхностью герметичного тороидального резервуара.
3. Летательный аппарат по п.1, отличающийся тем, что герметичный тороидальный резервуар выполнен в виде герметичного кольцевого канала прямоугольного сечения с боковыми стенками в виде сильфона и горизонтальными плоскими верхней и нижней поверхностями, выполненными в виде колец, а тяговые устройства расположены над резервуаром и взаимодействуют с верхней поверхностью герметичного тороидального резервуара, при этом верхняя поверхность герметичного тороидального резервуара имеет возможность изменения угла наклона.
4. Летательный аппарат вертикального взлета и посадки, имеющий дискообразный или тороидальный фюзеляж с двигательным устройством, ось которого совпадает с осью фюзеляжа, расположенным внутри канала, образованного фюзеляжем или выше фюзеляжа, отличающийся тем, что, содержит герметичный тороидальный резервуар, установленный внутри фюзеляжа по периферии, выполненный в виде герметичного кольцевого канала прямоугольного сечения с жесткими немагнитными стенками, частично заполненный магнитной жидкостью с возможностью ее свободного перетекания, минимум две пары симметричных электромагнитов, расположенных равномерно по длине резервуара, с полюсами, охватывающими герметичный тороидальный резервуар по боковым стенкам, минимум две пары симметричных постоянных магнитов установленных под дном и/или по боковым стенкам герметичного тороидального резервуара, при этом точка приложения тяговой силы двигательного устройства расположена выше центра масс летательного аппарата.
| Способ бокового затылования, прорезания спиральных канавок и заточки глобоидных червячных фрез на зубофрезерном станке | 1949 |
|
SU82674A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА "ЛЕТАЮЩЕЙ ТАРЕЛКИ" | 2004 |
|
RU2264952C1 |
| US 20100320333 A1, 23.12.2010 | |||
| Указатель цены взвешенного товара | 1929 |
|
SU19813A1 |
| СПОСОБ ПОЛУЧЕНИЯ МНОГОСЛОЙНОГО АНТИКОРРОЗИОННОГО ПОКРЫТИЯ НА СТАЛЬНЫХ ДЕТАЛЯХ | 2005 |
|
RU2319796C2 |

