Область техники
Изобретение относится к системе для индуктивной зарядки транспортных средств, снабженных электронной системой позиционирования.
Уровень техники
Уровень техники описывается следующими патентными заявками (в порядке возрастания дат подачи заявки):
- DE 000004236286 A1, H02J 7/00, Daimler, 28.10.1992, функция подъема катушки жестким рычагом, кинематика первичной катушки, управляемая датчиком;
-JP 000009017666 AA, H01F 38/14, Toyoda, 28.06.1995, механическая система точного позиционирования со стопорами колес и устройством смещения;
- JP 000008265992 AA, H02J 17/00, Toyoda, 24.03.1995, механическая система точного позиционирования, точное позиционирование с помощью зондирующего зарядного тока;
- US 5850135, Н02М, 10/44, Sumitomo, 30.01.1997, механическая система точного позиционирования на передней стороне транспортного средства, различные формы кинематической связи катушек, позиционирование с помощью визуального контакта или направляющей для колеса, разнообразнейшие варианты кинематических систем. Символ IPC Н02М 10/44 не удалось найти в издании/версии 2009.01. Этот символ также не удалось найти ни в одном другом издании/версии, ср. JP 000009017666 AA. Удалось найти только категорию испытаний Н01М 10/46 … аккумуляторы, конструктивно объединенные с зарядными устройствами (схемы подключения для заряда H02J 7/00). К противопоставлениям относится заявка JP 000058069404 AA, поданная компанией Denso 21.10.81, разумеется, без какой-либо боковой или вертикальной системы позиционирования. Описан только колесный стопор;
- JP 002003079006 AA, B60L 11/18, Yokohama, 03.09.2001, жесткие колеи со стопорами в качестве единственной системы позиционирования, фиксированная ширина колеи считается заданной;
- JP 002006345588 AA, B60L 5/00, Matsushita, 07.06.2005, кинематическая система позиционирования для многократного установления связи с катушкой;
- JP 002007159359 AA, B60L 11/18, Sumitomo, 08.12.2005, позиционирование и обмен данными в ближнем радиусе с помощью электромагнитных волн, а также кинематическая система позиционирования;
- ЕР 000001930203 А1, B60L 11/18, Toyota, 31.08.2006 (в Японии 29.09.2005 JP 002007097345 AA), видеосистема помощи при парковке, в частности камера заднего вида, запуск процесса позиционирования пользователем для подтверждения конечного положения, идентификация зарядной станции и положения с помощью наблюдения за дисплеем и дополнительного сигнала, система смещения для установления связи с катушкой, система распознавания (не описанная в подробностях) нахождения припаркованного транспортного средства над зарядным устройством, ручное подтверждение для точности позиционирования. Распознавание режима работы отсутствует;
- DE 102007033654 A1, H02J 17/00, H01F 38/14, SEW, 17.07.2007, подъем катушки под весом колеса, соединение жестким рычагом, позиционирование с помощью колеи.
Таким образом, из уровня техники известны активные кинематические системы позиционирования, пассивные системы позиционирования с помощью неподвижных направляющих элементов для колеса, а также неподвижных или подвижных устройств передачи энергии, или электронная система позиционирования с помощью видеосигналов и наблюдения оператора за дисплеем, а также ручного выбора на дисплее, то есть субъективное определение места. Чисто электронное, то есть полностью автоматизированное определение места с опцией автоматического или полуавтоматического позиционирования, не описано в уровне техники.
Проблема
Кинематика означает механическую работу, связанную с затратами энергии, износом и риском нарушения функционирования. Фиксированные расстояния до датчиков положения на зарядной стороне подразумевают высокие требования к стандартизации на стороне транспортных средств. Достигнутый таким образом оптимальный результат позиционирования обеспечивает максимальную эффективность передачи энергии, которая, однако, снижается вследствие затрат энергии на работу механической системы позиционирования и высоких расходов на изготовление, монтаж и техническое обслуживание.
Системы позиционирования, основанные на видеокамерах, или системы наблюдения/отслеживания с помощью оптических приборов зависят от условий освещенности и внимательности водителя, а также от его способности интерпретировать увиденное. Недостаточная освещенность и свет, падающий с противоположной стороны, приводят к ошибкам определения. Кроме того, точность измерения расстояния и определения места посредством обработки изображения ниже, чем у радара.
Кроме того, для идентификации катушек, принадлежащих различным операторам, или для определения неготовности к работе одной из катушек в ряду свободных катушек водителю и без того необходимо посмотреть через стекло, и этот взгляд не может быть заменен изображением на мониторе. В частности, индикация режимов работы или различных операторов не обязательно будет читаться на видеоизображении.
Водитель, отслеживая изображение на мониторе, должен соотносить реальную картину и изображение на мониторе, чтобы выделить катушку, выбранную вблизи транспортного средства, в виде поля на мониторе. Ему приходится многократно переводить взгляд между различными окнами вокруг себя и монитором. Это утомительно и чревато ошибками.
Решение
Задачей изобретения согласно пункту 1 формулы изобретения является уменьшение системных расходов и затрат на жизненный цикл изделия, снижение эксплуатационных рисков, уменьшение вероятности ошибки оператора и некорректного функционирования путем максимального исключения вмешательства оператора, механической работы и трения, а также дополнительных или чувствительных к помехам датчиков и систем помощи водителю.
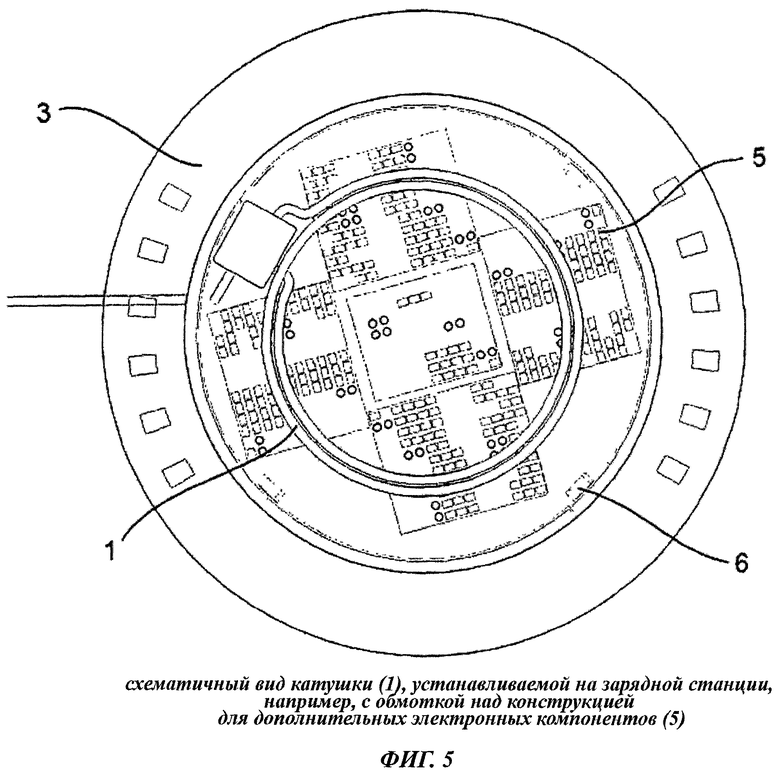
Электронная система помощи при позиционировании, далее называемая для краткости системой позиционирования, обеспечивает точное и универсальное, т.е. подходящее для любых зарядных станций и транспортных средств, подведение транспортного средства в положение, необходимое для зарядки. Корпус катушки, установленный таким образом, чтобы он возвышался над грунтом, благодаря характерным свойствам отражения и видимым обозначениям служит для идентификации и, одновременно, обеспечивает достаточно небольшое удаление по вертикали до вторичной катушки, установленной на дне транспортного средства.
Достигнутые преимущества
Электронная система помощи при позиционировании для индуктивных зарядных станций, описываемая в пункте 1 формулы, отличается повышенным удобством пользования, а также функциональной и эксплуатационной надежностью по сравнению с ручной зарядкой при помощи зарядных кабелей. Она надежно функционирует в любых условиях независимо от погоды и степени загрязненности, а также дисциплинированности, опыта и ловкости водителя. Таким образом, транспортное средство гораздо точнее устанавливает соединение с общедоступной сетью как в целях зарядки, так и в целях сброса энергии в сеть. В результате повышается вероятность повсеместного массового применения транспортных средств с электрическим приводом и гарантируется доступность батарей транспортных средств для компенсации колебаний в сети в периоды пиковой нагрузки.
Установка в плоскости грунта снимает вопросы вандализма и эстетической привлекательности. Экранирование передачи энергии и данных припаркованным транспортным средством предотвращает злоупотребления и манипуляции не только благодаря максимальной недоступности зарядной техники во время процесса, но и благодаря малой распространенности протоколов индуктивной коммуникации. Кроме того, недоступность и отсутствие движущихся частей снаружи транспортного средства уменьшают риск получения травмы.
Другое осуществление изобретения по примеру выполнения №2.
Выгодный вариант исполнения изобретения описан в примере 2. Вариант исполнения, описанный в пункте 2 формулы, позволяет использовать повышенную точность и помехозащищенность сканирующих датчиков на радиолокационной основе. Эти датчики и без того во все возрастающем масштабе применяются для управления дистанцией и распознавания препятствий в ближнем радиусе, то есть не потребуются дополнительные затраты. Кроме того, такие датчики благодаря увеличивающейся степени объединения датчиков, а также интеграции компонентов и функциональной интеграции, часто используются в системах помощи при парковке, то есть можно обратиться к существующим системам полуавтоматического маневрирования.
Измерение дистанции и определение места объектов, а также расчет траектории и реализация команд управления при помощи компьютера могут использоваться для достаточно точного позиционирования транспортного средства. Точность, достижимая при помощи определения угла поворота руля и оборота колеса, достаточна для грубого позиционирования. От дополнительных индикаторов можно отказаться.
Радиолокационное определение места в сочетании с навигационной системой и системой голосового ввода будет работать всегда быстрее, чем ввод с сенсорного экрана, так как оно автоматически ведет к правильной катушке, а водитель на соответствующий запрос должен просто ответить «да». Предварительная настройка профиля пользователя и записи в базе данных позволяют, например, всегда подъезжать к определенным катушкам или, предпочтительно, к катушкам определенного оператора, или к накрытым крышей катушкам.
Процесс парковки в упрощенном варианте, например в домашнем гараже, может происходить и без предварительного электронного определения места катушки с помощью ручного грубого позиционирования на зарядной поверхности и при активированном точном позиционировании. При этом точное позиционирование, предпочтительно, после соответствующего подтверждения водителя, осуществляемого путем включения задней передачи, снижения скорости ниже скорости пешехода или сильного поворота управляемых колес, переключается в режим готовности к распознаванию и пробуждения катушки, а транспортное средство, предпочтительно, точно позиционируется в полуавтоматическом режиме в соответствии с этапами работы системы помощи при парковке.
Благодаря этому точное установление связи с катушкой становится возможным даже для транспортных средств, не имеющих радиолокационных датчиков. Кроме того, в домашнем гараже или на домашней парковке функция телематики для расчетов также не требуется. В результате дополнительно снижается стоимость системы, а люди, регулярно пользующиеся автомобилем для поездок на работу, могут шире использовать транспортные средства с электрическим приводом. При этом катушка может быть смонтирована над грунтом в порядке дооборудования или под грунтом с соответствующей разметкой проезжей части. Последний вариант облегчает очистку поверхности и уборку снега, но, очевидно, менее пригоден для радиолокационного определения места и отличается увеличенным расстоянием до катушки.
Другое осуществление изобретения по пункту формулы №4.
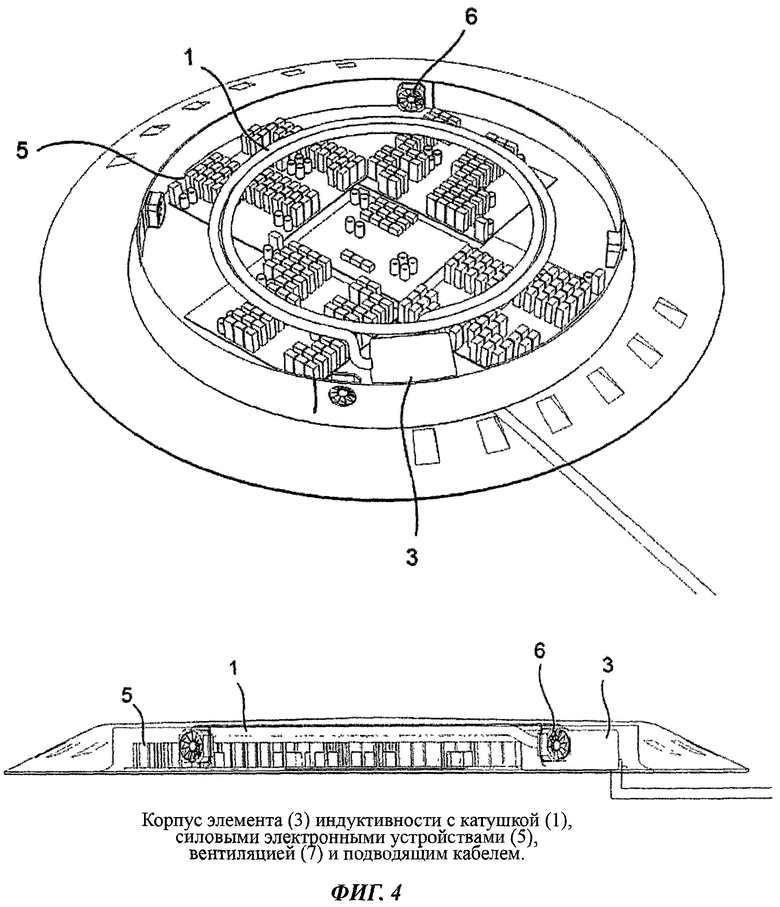
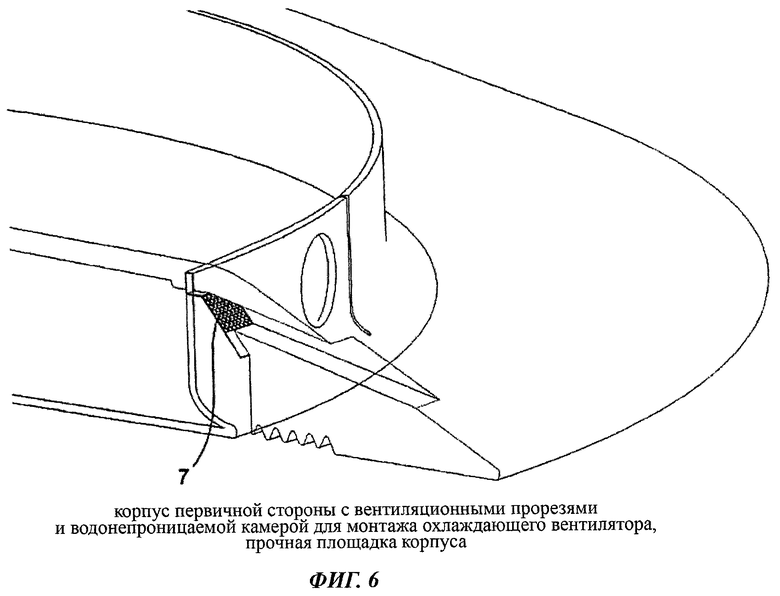
В варианте исполнения изобретения, описанном в пункте 4 формулы, корпус катушки зарядной станции с вентиляционными прорезями становится однозначно определяемым объектом, причем конструкция, выполненная в виде круговой площадки, одновременно отличается достаточной стойкостью к статическим и динамическим нагрузкам, имеющим место в области соприкосновения с колесами дорожного транспортного средства, высокой герметичностью, достаточной проницаемостью для радиолокационного излучения и удобством изготовления.
Такой элемент площадки, видимый снаружи, полностью накрывает расположенный внутри отражающий буртик. В результате осложняется воспроизведение отражаемой картины или манипуляции с ней. Зарядный диск не имеет на поверхности ни дисплея, ни кнопок или внешних разъемов, то есть представляет собой максимально закрытый, слегка закругленный сверху элемент привлекательной формы. Расположенная внутри светодиодная подсветка служит стояночными огнями, индикатором режима работы и освещением окружающей среды.
В варианте исполнения изобретения, описанном в пункте 4 формулы, нижняя часть корпуса катушки зарядной станции имеет по периметру вогнутый буртик и, тем самым, превращается в отражатель, компенсирующий расстояние. Таким образом, этот отражатель возвращает отчетливый сигнал повышенной силы (более сильный, чем в обычном варианте), который направляется на сканирующие датчики транспортного средства независимо от угла, под которым приближается транспортное средство, причем отражатель полностью воспроизводит характеристичный образец сигнала в большом диапазоне допусков в зависимости от угла наклона между транспортным средством и монтажным положением корпуса катушки.
Отчетливо видимый и многократно нанесенный опознавательный знак катушки дает информацию о поставщике энергии и исключается возможность перепутать место зарядки. Визуальная идентификация водителем не может быть заменена обработкой изображения, в частности, тогда, когда не используется электронное определение места, когда в ряд поблизости друг от друга расположено несколько свободных катушек или когда водитель целенаправленно хочет использовать катушку определенного оператора либо объехать катушку с отрицательной индикацией режима работы. В этой целью катушки оснащены опознавательными знаками аналогично транспортным средствам. Такой опознавательный знак, предпочтительно, состоит из начальных букв названия производителя и ряда цифр.
Описание примеров выполнения на основании чертежей (фиг.1-7).
Транспортное средство (4) заезжает с любой стороны на индуктивный диск (3) и автоматически распознает катушку на грунте с помощью предварительно настроенного или включенного вручную режима поиска радаром. Например, пользователь в ближнем радиусе от часто посещаемых мест, например рабочего офиса или магазина, может задать в настройках автоматическую активизацию режима поиска в месте назначения. Или же он может в отсутствие радиолокационного определения места грубо, на глаз, заехать на катушку.
Система проверки достоверности при помощи навигационной системы постоянно регистрирует все зарядные диски в ближнем окружении согласно записям в базе данных. Навигационная система по простой команде водителя ведет к ближайшей зарядной станции или к ближайшей свободной зарядной станции, если на транспортном средстве установлена предпочтительная опция телематики с соответствующим каналом обратной связи.
После проверки достоверности в ближнем радиусе и обнаружении свободной зарядной станции появляются две возможности. Либо навигационная система выдает водителю сведения о поставщике энергии и мощности зарядной станции, либо водителю ввиду отсутствия совпадения в базе данных или наличия нескольких свободных мест для зарядки предлагается визуально выбрать нужную зарядную станцию.
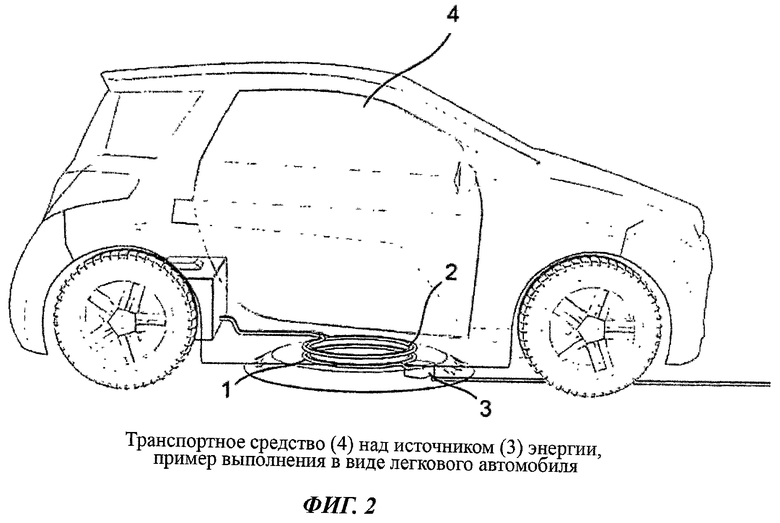
Катушка (1) расположена на высоте примерно 70 мм над грунтом. Под катушкой в том же корпусе находится питающее электронное устройство (5). Корпус полностью закрыт, за исключением поверхностных, защищенных от воды прорезей, предназначенных для притока и отвода воздуха. Единственным внешним разъемом является силовой кабель. Вентиляторы (6) корпуса обеспечивают воздушное охлаждение.
Высота корпуса катушки рассчитана таким образом, чтобы:
- обычно и без того малый дорожный просвет транспортных средств с электрическим приводом с учетом обычного прогиба подвески при максимальной загрузке обеспечивал достаточный свободный проход;
- в крайнем случае при одновременном превышении максимальной загрузки и уменьшении давления в шинах ниже минимально допустимого уровня транспортное средство садилось на корпус катушки;
- компоненты электронного питающего устройства помещались в корпус.
Благодаря этому можно обойтись без отдельного корпуса для электронного устройства, а также без соответствующих затрат на проводку и монтаж.
На расстоянии примерно двух корпусов транспортного средства радар ближнего действия автоматически распознает характеристичный отражатель корпуса катушки и предлагает водителю припарковаться, выводя на дисплей параметры катушки, причем накрытый отражатель одновременно гарантирует надежность функционирования, даже если части окажутся закрытыми вследствие загрязнения или действий вандалов. После подтверждения активируется полуавтоматический процесс парковки.
Во время процесса заезда, длящегося примерно 20 секунд, проводится обмен данными об уровне заряда и оплате. Точное позиционирование осуществляется по существующим алгоритмам систем помощи при парковке в составе ABS и электромеханического рулевого управления, а также с помощью регистрации оборотов колеса и поворота управляемых колес.
Использование зондирующего зарядного тока в качестве исполнительного элемента системы точного позиционирования позволяет отказаться от всех прочих вспомогательных элементов системы точного позиционирования, например датчика приближения, датчиков магнитного поля или систем обработки изображений. Поскольку процесс зарядки начинается уже в грубой полосе захвата электромагнитной связи катушек, используется каждая секунда достаточно эффективной передачи мощности. Кроме того, плавный пуск зарядки повышает срок службы участвующих в этом процессе компонентов, вплоть до батареи транспортного средства. Автоматически саморегулирующаяся итерация превращает поиск положения, отличающегося максимальным совмещением с катушкой, в малозаметный для водителя процесс, завершающийся в течение нескольких секунд.
Процесс зарядки начинается непосредственно после остановки колес. Автоматически включаемый электрический стояночный тормоз гарантирует безопасность режима зарядки независимо от положения селектора передач или бокового уклона поверхности станции.
Парковочные места с зарядными станциями, как правило, занимаются только транспортными средствами, которые нуждаются в подзарядке или могут обеспечить сброс энергии в сеть. Использование таких парковочных мест разрешается только соответствующим транспортным средствам с электрическим приводом. Использование таких парковочных мест подразумевает согласие водителя с условиями оказания услуги.
Запрос со стороны станции о необходимости выполнения зарядки не нужен, так как катушка (2) транспортного средства при точном позиционировании всегда принудительно пробуждает катушку (1) зарядной станции и в зависимости от состояния батареи транспортного средства или доступной общедоступной сети запускает зарядку или сброс энергии в сеть.
В отсутствие такой автоматической активизации терялись бы ценные возможности выполнить зарядку аккумуляторной батареи транспортного средства избыточным током сети или срочно сбросить в общедоступную сеть требуемую энергию. По существу, только автоматическая зарядка или автоматический сброс энергии в сеть индуктивным путем может гарантировать высокий запас хода транспортных средств с электрическим приводом и компенсацию пиковой нагрузки в общедоступной сети.
При этом основополагающие алгоритмы гарантируют, что:
- зарядная емкость при автоматическом сбросе энергии в сеть ни в коем случае не может опуститься ниже заданного пользователем минимального остатка;
- остаточная емкость, заданная пользователем, будет подзаряжаться только во время действия наиболее благоприятных ночных тарифов на электроэнергию;
- в установленные пользователем дни и часы (в зависимости от прочих настроек) будет доступен максимальный заряд;
- в установленные пользователем дни и часы (в зависимости от прочих настроек) будет происходить максимальный сброс энергии в сеть;
- в момент отправления к месту назначения, введенному пользователю при парковке, заряд будет достаточен для движения до места назначения.
В следующем варианте исполнения мультимедийный интерфейс навигационной системы предлагает дополнительные функции, например автоматическое протоколирование местонахождения зарядной станции, длительности зарядки или сброса энергии в сеть и емкости батареи до и после процесса зарядки или статистические данные о количестве, частоте и распределении в пространстве зарядных станций, на которых производилась зарядка, а также прочие функции. Посредством подключения к интернету служба телематики навигационной системы может пересылать данные на электронный почтовый ящик пользователя или выкладывать их в защищенную часть портала пользователя. Таким образом, водителю значительно проще контролировать счета за электроэнергию, выставляемые оператором, или подобрать подходящий тариф для своего пользовательского профиля.
Список ссылочных обозначений
1 - первичная катушка со стороны зарядной станции;
2 - вторичная катушка со стороны транспортного средства;
3 - корпус катушки со стороны зарядной станции;
4 - транспортное средство;
5 - электрические и электронные устройства;
6 - вентилятор;
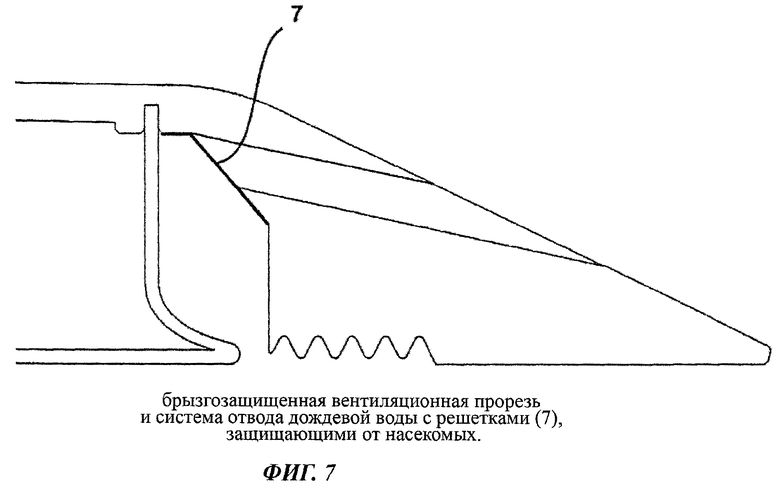
7 - решетки, защищающие от насекомых.
Группа изобретений относится к системе для индуктивной зарядки транспортных средств, снабженных электронной системой позиционирования. Электронная система позиционирования транспортных средств с электрическим приводом характеризуется тем, что имеющиеся в транспортном средстве датчики и базирующиеся на них системы помощи при парковке дополнительно используются для того, чтобы в автоматическом режиме распознавать индуктивные зарядные станции для того, чтобы точно позиционировать транспортное средство, на дне которого установлена катушка. Корпус катушки зарядной станции служит высоко характеристичным отражателем для сканирующих датчиков, установленных на транспортном средстве, причем вогнутый буртик по периметру образует отражатель для радиолокационного сигнала, посылаемого с самых разных расстояний и углов. Базовая поверхность корпуса катушки имеет форму окружности. Решение направлено на повышение точности подведения транспортного средства в положение, необходимое для зарядки. 2 н. и 28 з.п. ф-лы, 7 ил.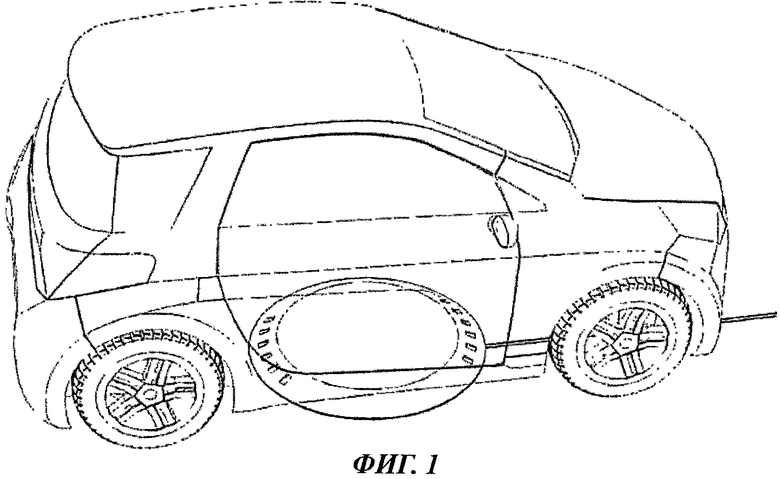
1. Электронная система позиционирования транспортных средств с электрическим приводом в ближней зоне индуктивных зарядных станций, отличающаяся тем, что имеющиеся в транспортном средстве или устанавливаемые в качестве опций радиолокационные, лазерные, лидарные, ультразвуковые, инфракрасные, спутниковые или индуктивные датчики и базирующиеся на них системы помощи при парковке дополнительно используются для того, чтобы в полностью автоматическом режиме распознавать индуктивные зарядные станции в ближнем радиусе с помощью корпуса установленной на зарядной станции катушки или внутренней техники или технологии катушки, не используя визуальный осмотр местности, ручной ввод данных оператором и дополнительные отражатели на зарядной станции, а также для того, чтобы достаточно точно позиционировать транспортное средство, на дне которого установлена катушка, в режиме маневрирования при помощи компьютера над катушкой зарядной станции, без необходимости осуществления более точного или более близкого совмещения обеих катушек с помощью дополнительных устройств для смещения и подъема.
2. Система позиционирования по п.1, отличающаяся тем, что предпочтительным способом наблюдения за окружающей средой служит радар ближнего действия.
3. Система позиционирования по п.1, отличающаяся тем, что исключается наличие металлических предметов на корпусе катушки, предпочтительно благодаря радару ближнего действия, и тем самым, обеспечивается бесперебойная зарядка.
4. Система позиционирования по п.1, отличающаяся тем, что, предпочтительно, выполняется проверка достоверности определения места зарядной станции с помощью базы данных установленной, или могущей быть установленной в транспортном средстве, и регулярно обновляемой или самообучающейся навигационной системы со службой телематики, на основании которой навигационная система отображает сведения, например, об операторе и мощности зарядной станции.
5. Система позиционирования по п.1, отличающаяся тем, что в случае отсутствия записи в базе данных, соответствующей катушке, а также при наличии ряда свободных и последовательно расположенных катушек или в случае, когда водитель целенаправленно ищет катушку определенного оператора, а в непосредственной близости имеются катушки различных операторов, система, предпочтительно, предлагает водителю визуально идентифицировать опознавательный знак катушки.
6. Система позиционирования по п.1, отличающаяся тем, что опознавательный знак катушки, предпочтительно, выбирается на чувствительном дисплее, а ввод, предпочтительно, осуществляется голосовой командой, причем катушка, к которой проще всего подъехать, предпочтительно, отображается на дисплее транспортного средства в виде выделенной строки в списке опознавательных знаков доступных катушек.
7. Система позиционирования по п.1, отличающаяся тем, что в предпочтительном варианте исполнения водитель имеет возможность подтвердить предложенный вариант или выбрать другую катушку путем ввода номера записи в списке.
8. Система позиционирования по п.1, отличающаяся тем, что функции системы помощи при парковке, которая установлена или может быть установлена в транспортном средстве, расширяются за счет помощи в определении места зарядной катушки, причем эта система подводит транспортное средство к месту для зарядки в зависимости от места установки приемной катушки на дне транспортного средства, причем зарядная катушка зарядной станции, предпочтительно, установлена по центру парковочного места, а катушка транспортного средства - по центру дна транспортного средства.
9. Система позиционирования по п.1, отличающаяся тем, что водитель, предпочтительно, аналогично полуавтоматической парковке последовательно выполняет этапы парковки, включая переднюю и заднюю передачу и нажимая педали тормоза и газа, или, повернув руль, в любой момент может прервать процесс, или может включить полностью автоматизированный автопилот для позиционирования над катушкой.
10. Система позиционирования по п.1, отличающаяся тем, что в зоне позиционирования с точностью нескольких сантиметров или в соответствующим образом настроенной полосе захвата катушка транспортного средства, предпочтительно, пробуждает катушку зарядной станции электромагнитным импульсом и, одновременно, устанавливает индуктивную связь между обеими катушками, которая накладывается на индуктивную передачу энергии, благодаря чему обмен, предпочтительно, всегда инициируется принудительно без вмешательства оператора и без запроса со стороны зарядной станции в рамках настроек, выполненных пользователем на транспортном средстве.
11. Система позиционирования по п.1, отличающаяся тем, что идентификация водителя в целях авторизации и оплаты процесса зарядки или сброса энергии в сеть, предпочтительно, осуществляется по его индивидуальному ключу транспортного средства, причем этот ключ, предпочтительно, содержит также информацию о прочих индивидуальных настройках, например, о заданных минимальных значениях заряда и сброса энергии в сеть, или о настройках положения сидений и кондиционера.
12. Система позиционирования по п.1, отличающаяся тем, что подтверждение прав доступа конкретного ключа транспортного средства осуществляется через онлайн-портал службы телематики транспортного средства в сочетании с предложением предприятия энергоснабжения.
13. Система позиционирования по п.1, отличающаяся тем, что в зоне с точностью нескольких сантиметров процесс зарядки, предпочтительно, начинается с зондирующего заряда, причем система помощи при парковке, предпочтительно, самостоятельно использует окончательную величину зарядного тока в качестве дополнительного управляющего параметра вместе с по прежнему имеющими приоритет датчиками расстояния, без использования дополнительных датчиков магнитного поля, и с помощью смещения вперед, назад и вбок кратчайшим путем добивается точного совмещения обеих катушек в течение нескольких секунд.
14. Система позиционирования по п.1, отличающаяся тем, что в случае отрицательного результата проверки достоверности определения места зарядной станции самообучающаяся навигационная система самостоятельно сообщает полученные во время процесса зарядки данные, относящиеся к еще не зарегистрированной зарядной станции, по каналу обратной связи, предпочтительно, в общую службу телематики производителя транспортного средства, на основании которых новая зарядная станция регистрируется на центральном онлайн-портале, и информация о ней становится доступна для всех пользователей службы.
15. Система позиционирования по п.1, отличающаяся тем, что навигационная система, предпочтительно, автоматически документирует точное положение зарядной станции по спутниковым координатам и, предпочтительно, индуктивным путем передает на бортовой компьютер, который установлен или может быть установлен в транспортном средстве, прочие ориентировочные данные, например, время зарядки, заряд батареи до и после зарядки, длительность зарядки, благодаря чему пользователь непрерывно и автоматически может получать все данные о зарядке, предпочтительно, посредством индуктивного канала обратной связи или общей службы телематики, GSM, интернет-соединения или интерфейса передачи данных в транспортном средстве, например, USB.
16. Система позиционирования по п.1, отличающаяся тем, что процессы сброса энергии в сеть, во время которых избыточная энергия из накопителя транспортного средства возвращается в сеть в периоды пиковой нагрузки, предпочтительно, удобным и надежным образом документируются той же самой навигационной системой, включающей, предпочтительно, общую службу телематики производителя транспортного средства.
17. Корпус катушки зарядной станции, отличающийся тем, что корпус установленной на зарядной станции катушки одновременно служит высоко характеристичным отражателем для сканирующих датчиков, установленных на транспортном средстве, причем вогнутый буртик по периметру образует отражатель для радиолокационного сигнала, посылаемого с самых разных расстояний и, одновременно, с самых разных углов, благодаря тому, что его базовая поверхность имеет форму окружности.
18. Корпус катушки по п.17, отличающийся тем, что, предпочтительно, крышка корпуса катушки, с целью безотказного установления связи между катушками должна иметь максимально возможную проницаемость для электромагнитного излучения, а стенка корпуса катушки с целью максимально качественного отражения луча - минимально возможную проницаемость для электромагнитного излучения.
19. Корпус катушки по п.17, отличающийся тем, что в предпочтительном варианте исполнения все видимые поверхности корпуса могут быть изготовлены из одного и того же полимерного композитного материала, отличающегося высокой электромагнитной проницаемостью, в ходе полностью автоматизированного процесса холодного выдавливания или литья под давлением, без вырезов с помощью инструментов, и в виде цельного элемента.
20. Корпус катушки по п.17, отличающийся тем, что, предпочтительно, две разделительные планки, выступающие от нижней стороны верхней части корпуса, препятствуют рециркуляции выходящего теплого воздуха и, одновременно, служат безошибочным позиционирующим указателем при сборке верхней и нижней части корпуса.
21. Корпус катушки по п.17, отличающийся тем, что на круговой площадке корпуса катушки предусмотрены четыре опознавательные поверхности, смещенные на 90° друг от друга.
22. Корпус катушки по п.17, отличающийся тем, что нижняя часть корпуса вместе с буртиком по периметру изготавливается, предпочтительно, из цельного плоского листа в ходе полностью автоматизированного процесса гибки в штампе или глубокой вытяжки вместе с позиционирующим фальцем для указателей позиционирования механическим способом.
23. Корпус катушки по п.17, отличающийся тем, что благодаря наличию буртика по периметру, вода, проникающая в расположенную по периметру лабиринтную систему, предпочтительно, в широком диапазоне наклонных положений, всегда стекает на противоположную сторону до того, как она сможет проникнуть вовнутрь корпуса через вентиляционные отверстия.
24. Корпус катушки по п.17, отличающийся тем, что, предпочтительно, поднимающиеся вверх под уклоном прорези для всасывания воздуха благодаря лабиринтной системе защищают электронные устройства в корпусе от брызг воды и поверхностных вод в широком диапазоне наклонных положений, а вода, проникшая до буртика, может вытекать через отверстия на нижней кромке вогнутого буртика и стекать через полость под нижней частью корпуса.
25. Корпус катушки по п.17, отличающийся тем, что, предпочтительно, цельнометаллическая нижняя часть корпуса образует соответственно, поверхность большой площади для конвекционного охлаждения.
26. Корпус катушки по п.17, отличающийся тем, что в предпочтительном варианте исполнения светодиодная подсветка с центральным источником света посредством стекловолокна, проложенного по периметру буртика за вентиляционными отверстиями, служит одновременно для индикации режима работы, подсветки места стоянки и освещения окружающей среды.
27. Корпус катушки по п.17, отличающийся тем, что корпус, помимо катушки, предпочтительно, вмещает электронные устройства, отвечающие за подачу питания или возврат энергии в сеть.
28. Корпус катушки по п.17, отличающийся тем, что на прорезях для всасывания воздуха, предпочтительно, предусмотрены решетки, защищающие электронные устройства в корпусе от насекомых и пресмыкающихся, а также предотвращающие проникновение внутрь с водой наносов или крупных загрязнений, причем решетки выполнены легко снимаемыми и очищаемыми.
29. Корпус катушки по п.17, отличающийся тем, что корпус катушки, предпочтительно, имеет перекрестное воздушное охлаждение.
30. Корпус катушки по п.17, отличающийся тем, что температурный датчик вентиляторов прерывает процесс зарядки в случае перегрева, или в случае слишком интенсивного прямого облучения солнечными лучами, связанного с соответствующим нагревом, разрешает выполнения процесса зарядки только с задержкой по времени или на сниженной мощности до тех пор, пока тень от транспортного средства не обеспечит достаточное охлаждение.
| US 2009040068 A1, 12.02.2009 | |||
| DE 4344563 C1, 08.12.1994 | |||
| DE 202009000259 U1, 19.03.2009 | |||
| US 6590521 B1, 08.07.2003 | |||
| НАДЕЖНО ЗАЩИЩЕННАЯ ЗАСТЕЖКА | 2017 |
|
RU2732169C1 |

