Изобретение относится к области авиационной техники, в частности к оборудованию, обеспечивающему эксплуатацию беспилотных летательных аппаратов (БПЛА) мультироторного типа.
Для дозаправки беспилотного летательного аппарата ранее предлагалось:
Автоматическое управление БПЛА путем прокладывания маршрута следования/посадки оператором через разные каналы связи (мобильные GSM/GPRS, другие глобальные навигационные спутниковые системы (ГНСС) ГЛОНАСС, GPS и т. п.);
Контактные способы дозаправки (зарядки) аккумуляторов (совмещение контактов питания на БПЛА и станции дозаправки, устройства автоматической замены отработанных аккумуляторов).
Из уровня техники известна система автоматического управления беспилотным летательным аппаратом, применяемым для выявления неисправностей элементов воздушных линий электропередач [RU 183107 U1, опубл.: 11.09.2018], включающая беспилотный летательный аппарат (БПЛА) для выявления неисправностей элементов воздушных линий электропередач, содержащий модуль связи, включающий один основной широкополосный канал связи для передачи в центр управления данных телеметрии, получения команд управления и данных позиционирования, отличающийся тем, что модуль связи включает один дополнительный высокоскоростной узкополосный канал связи, выполненный с возможностью передачи в ближней зоне собранных данных графических изображений от БПЛА через базовые станции в центр управления при посадке БПЛА на посадочных площадках базовых станций.
Недостатком аналога является невозможностью использования БПЛА для мониторинга протяженных объектов, обусловленная малым запасом хода БПЛА.
Также известно судовое устройство для обеспечения взлета и посадки беспилотных летательных аппаратов вертолетного типа [RU 153011 U1, опубл.: 27.06.2015], включающее расположенные на судне ангар и взлетно-посадочную площадку, отличающееся тем, что ангар оборудован закрытием, откидывающимся с помощью привода наружу до горизонтального положения, совпадающего с уровнем палубы ангара, и оснащен платформой-тележкой с приводом, предназначенной для перемещения беспилотного летательного аппарата из ангара на откинутое закрытие и обратно, причем на палубе ангара и на внутренней поверхности закрытия размещены рельсовые направляющие, по которым перемещается платформа-тележка.
Недостатком данного аналога является невозможность использования БПЛА для мониторинга объектов, расположенных на суше, вдали от водных объектов, пригодных для навигации судов, обусловленная конструктивной особенностью.
Также известны многофункциональная система и способ стыковки БПЛА [US9387928 (B1), опубл.: 12.07.2016]. Способ включает: прием посылки на центральном объекте; отображение с помощью центрального управления первой траектории полета первого БПЛА от центральной установки до конечного пункта назначения пакета, причем первая траектория полета содержит два или более сегментов и одну или несколько остановок на одной или нескольких стыковочных станциях между центральным объект и конечным пунктом назначения; инструктаж первого БПЛА для следования по первому маршруту полета; прием на центральном посту данных о погоде с одной или нескольких метеостанций; получение на центральном посту текущей позиции первого БПЛА; определение ближайшей док-станции из текущей позиции первого БПЛА; отображение второй траектории полета от текущей позиции первого беспилотного летательного аппарата к идентифицированной ближайшей стыковочной станции в ответ на данные о погоде; указание первому БПЛА следовать второму маршруту полета в ответ на данные о погоде; указание первому БПЛА сбросить посылку на указанной ближайшей док-станции; получение текущей позиции от второго БПЛА; отображение третьей траектории полета от текущего местоположения второго БПЛА до идентифицированной ближайшей стыковочной станции; и инструктаж второго БПЛА следовать третьему маршруту полета.
Основной технической проблемой прототипа является низкая надежность стыковочной станции, обусловленная малой точностью автоматической посадки БПЛА для его зарядки.
Также известна станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) [RU2723267C1, опубл.: 09.06.2020], включающая: посадочную платформу для БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, при полном весе станции, не превышающем грузоподъемности БПЛА с учетом динамики его перемещения, с возможностью транспортировки станции посредством БПЛА, отличающаяся тем, что она дополнительно содержит автономное радиопередающее устройство с источником питания, радиопередатчиком и радиоприемником, с возможностью излучения закодированного сигнала о своем местоположении, своих текущих энергетических возможностей и наличия/отсутствия БПЛА на платформе, и приема закодированных управляющих сигналов от центрального оператора и/или всех мультиагентов роя БПЛА.
Основной технической проблемой аналога является контактный способ зарядки аккумуляторов БПЛА, необходимость точного позиционирования БПЛА для замены аккумулятора.
Также известна автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней [RU2721048 C1, опубл. 15.05.2020], включающая: посадочную платформу с посадочными огнями или маркерами, контакты подачи напряжения, блок питания и блок управления. Посадочная платформа выполнена в виде полого многогранника, внутренняя поверхность которого повторяет наружную поверхность, с количеством вершин, равным количеству шасси БПЛА. Посадочная платформа установлена на опорах или держателе, на которые установлен по крайней мере один вибратор. БПЛА содержит корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны. Шасси имеют положение «взлета/ посадки », при котором шасси сведены вниз к центру с образованием обращенной вниз пирамиды или усеченной пирамиды, а также положение, при котором шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатия ими электрических контактов, находящихся на посадочной платформе и на БПЛА. Обеспечивается точное позиционирование БПЛА на посадочной платформе.
Основной технической проблемой аналога является контактный способ зарядки аккумуляторов БПЛА, необходимость точного позиционирования БПЛА для совмещения контактов БПЛА с контактами станции. Станция не обладает автономной системой подзарядки.
Из уровня техники известна система посадки беспилотного летательного аппарата по патенту US5716032 (опубл.: 19.02.1998г., правообладатель: United States of America as represented by the Secretary of the Army), включающая в себя средство обработки изображений, находящееся в процессоре компенсации движения, который вычисляет параметры летательного аппарата. Рассчитанные параметры представляют собой высоту, изменения высоты, изменения угла тангажа и рыскания, угла крена и изменений к ним, а также изменения поперечного диапазона и положения в нижнем диапазоне. Эти расчеты основаны на движении элементов в видео датчика изображения на борту летательного аппарата. Процессор компенсации движения также измеряет расстояние (в пикселях или элементах изображения) между двумя маяками, расположенными на известном расстоянии друг от друга по обе стороны от видимой точки приземления. Процессор управления восстановлением использует эти параметры для вычисления как желаемой, так и фактической высоты в зависимости от дальности от транспортного средства до видимой точки приземления и для обеспечения ошибки смещения по азимуту от желаемой траектории полета до зоны посадки. Процессор управления восстановлением также вычисляет команды для автоматического пилота на беспилотном летательном аппарате , который корректирует траекторию полета летательного аппарата. Процессор управления восстановлением обычно располагается вместе с процессором компенсации движения либо на земле, либо на летательном аппарате. Видеоизображение может быть передано на землю по линии передачи данных или обработка изображения может быть выполнена на борту летательного аппарата.
Недостатками данной системы являются:
Расчеты изменения высоты, изменения угла тангажа и рыскания, угла крена и изменений к ним, изменения поперечного диапазона и положения в нижнем диапазоне основаны на движении элементов видеодатчика изображения на борту летательного аппарата, что дает высокую погрешность и, в некоторых случаях, полную невозможность анализа параметров.
Измерение расстояния между двумя маяками, расположенными на известном расстоянии друг от друга по обе стороны от видимой точки приземления увеличивает количество компонентов инфраструктуры, усложняет конструкцию применимой системы, а также исключает мобильность системы в связи с необходимостью дополнительной установки маяков вне базовой станции или стартового контейнера.
Потребность в больших ресурсах для вычислений на борту летательного аппарата, что увеличивает расход энергии, массу БПЛА и ухудшает лётно-технические характеристики используемого БПЛА.
Также из уровня техники известен способ управления посадкой БЛА в зоне посадки [US2017045894(A1), опубл.: 16.02.2017, патентообладатель: QUALCOMM Incorporated], выполняемый процессором БПЛА для управления посадкой в зоне посадки , включающий получение непрерывных данных с датчиков в реальном времени, обнаружение целевой посадочной площадки во множестве посадочных площадок в зоне посадки , вычисление координат ориентации и положения для посадки на основе данных непрерывного датчика в реальном времени, при этом получение информации относительно положения и векторе полета происходит через приемопередатчик, установленный на борту БПЛА. После идентификации БПЛА в зоне посадки процессором БПЛА для управления посадкой отрабатывается обнаружение альтернативного целевого посадочного отсека, доступного для приземления, из множества посадочных отсеков на основе данных, на основе непрерывно поступающих данных датчиков в реальном времени. Корректировка перспективы БПЛА происходит путем изменения высоты над зоной посадки , изменение шага, крена и/или настройку рыскания БПЛА в соответствии с получаемыми данными с датчиков в режиме реального времени.
Недостатки данного способа:
Вычислительные мощности на борту БПЛА увеличивают расход потребляемой БПЛА энергии и температуру внутри корпуса БПЛА, что может пагубно сказываться на электронных компонентах, увеличивают массу БПЛА, что снижает летно-технические характеристики (ЛТХ) БПЛА.
Для посадки, в качестве датчика, и для аэросъемки требуются видеокамеры с разными характеристиками. Использование одной камеры снижает характеристики фото-видеосъемки, использование более одной камеры – резко увеличивает стоимость БПЛА, расход энергии и снижает ЛТХ.
Известен способ посадки беспилотного летательного аппарата [US20150051758, опубл.: 19.02.2015г., правообладатель: KOREA AEROSPACE RESEARCH INSTITUTE], включающий распознавание метки, установленной на БПЛА, по средствам множества датчиков обзора, расположенных вокруг точки посадки беспилотного летательного аппарата, и вычисление относительно местоположения беспилотного летательного аппарата на основе точки посадки с использованием метки, распознающейся камерой. Множество датчиков, установленных вблизи точки посадки, улучшает точность вычисления местоположения беспилотного летательного аппарата. Использование относительного местоположения БПЛА и абсолютного местоположения точки посадки, распознавание метки, установленной на БПЛА - позволяют осуществить точную посадку БПЛА в заданную точку.
Недостатки данного способа:
Датчики обзора устанавливаются вокруг точки посадки БПЛА, что увеличивает количество компонентов инфраструктуры, усложняет конструкцию применимой системы, а также исключает мобильность системы в связи с необходимостью дополнительной установки датчиков обзора вне базовой станции или стартового контейнера.
Использование множества датчиков обзора резко понижает надежность системы.
Использование метки на БПЛА приводит к отсутствию возможности посадки беспилотного летательного аппарата в сложных метеоусловиях.
Использование метки, подразумевает её размер, меньший чем размер БПЛА, таким образом требуется большее разрешение датчиков обзора и большая вычислительная мощность.
Использование метки предъявляет дополнительные требования к конструкции БПЛА, такие как наличие доступной для нанесения метки поверхности.
Также из уровня техники известно применение оптических элементов для осуществления автоматической посадки летательных аппаратов [US2016122038(A1) опубл. 05.05.2016; правообладатель: Singularity University]. Согласно данному изобретению, автономная посадка может быть достигнута беспилотными летательными аппаратами с использованием тепловизора и одного или нескольких оптических маркеров на посадочной платформе. Оптические маркеры могут представлять собой прямолинейные монохроматические структуры, которые могут обнаруживаться вычислительной системой на беспилотном летательном аппарате. Кроме того, беспилотный летательный аппарат может быть способен автоматически приземлиться, обнаружив один или несколько оптических маркеров и рассчитав относительное местоположение и / или ориентацию с посадочной платформы.
Недостатки данного способа:
При использовании оптических маркеров на посадочной платформе в сложных метеоусловиях вычислительная система БПЛА может их не увидеть, что затруднит посадку БПЛА и даже может привести к отказу системы.
Нанести оптические маркеры возможно только на ровную поверхность. Использование перфорированной поверхности для устранения эффекта «воздушной подушки» затрудняет использование системы оптических маркеров на посадочной площадке.
Потребность в больших ресурсах для вычислений на борту летательного аппарата, что увеличивает расход энергии, массу БПЛА и ухудшает лётно-технические характеристики используемого БПЛА.
Необходимость использования тепловизора, являющегося дорогостоящим, тяжелым и энергоёмким оборудованием.
Известен способ точной посадки беспилотного летательного аппарата (БЛА) на посадочную платформу [RU2722521C1, опубл. 01.06.2020]. Для реализации способа получают видеокадр с чётко различимым изображением БПЛА при нахождении его в зоне посадки с помощью видеокамеры, закрепленной на посадочной платформе базовой станции или стартового контейнера, определяют положение БПЛА на видеоизображении методами компьютерного зрения. Получают данные о координатах БПЛА от датчиков, расположенных на его борту. Производят сравнение данных, полученных на посадочной платформе, и данных с борта БПЛА. Передают управляющие сигналы для корректировки траектории посадки с учетом поправочных коэффициентов, полученных на основании сравнения вышеуказанных данных. Обеспечивается повышение точности посадки БПЛА.
Основной технической проблемой данного способа является необходимость наличия телеметрических датчиков на борту БПЛА, а также сложность навигации при посадке БПЛА в условиях плохой видимости.
Наиболее близкой, по технической сущности, является автоматическая базовая станция для беспилотных летательных аппаратов [RU199157U1, опубл.: 19.08.2020], включающая: платформу, вычислительный модуль, модуль управления, систему крепления БПЛА и модуль питания, отличающийся тем, что вычислительный модуль, модуль управления, модуль питания и платформа смонтированы внутри защитного корпуса, при этом платформа смонтирована подвижно на приводном механизме, внутри корпуса смонтировано оборудование микроклимата, а система крепления выполнена в виде линейных механизмов позиционирования с зубчатыми ремнями, содержащих двойные параллельные горизонтальные и вертикальные рейки, смонтированные на верхних и нижних участках зубчатых ремней, натянутых между приводами и шкивами вдоль каждого из краев платформы с возможностью сближения к центру и удаления от центра платформы реек, корпус сверху закрыт крышкой, снабженной механизмом автоматического открывания и закрывания.
Основной технической проблемой прототипа является контактный способ зарядки аккумуляторов БПЛА, необходимость точного позиционирования БПЛА для совмещения контактов БПЛА с контактами станции. Станция не обладает автономной системой подзарядки.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является обеспечение точной посадки БПЛА, бесконтактной автономной подзарядки БПЛА, в том числе в условиях автономной генерации энергии с использованием солнечной батареи.
Данный результат достигается благодаря тому, что:
Платформа выполнена в виде автономной станции.
На платформу нанесена разметка (навигационный рисунок) для места посадки, предпочтительно с использованием цветного люминофора, возбуждаемого УФ излучением.
Автономная станция может оснащаться солнечными панелями, способными генерировать и пополнять запасы электроэнергии, обеспечивая потребности установленного на станции оборудования и отдавать ее внешнему потребителю (БПЛА) бесконтактным способом.
Автономная станция оснащена катушкой, для создания переменного магнитного поля.
Автономная станция дозаправки БПЛА включает вычислительный модуль для установления связи с БПЛА, с целью обеспечения процесса посадки и дозаправки БПЛА.
Автономная станция оснащена видеокамерой, установленной (предпочтительно) в центре посадочной платформы, с углом обзора 90 градусов и узкополосным оптическим фильтром, работающим на частоте источника УФ-излучения БПЛА.
Автономная станция (вычислительный модуль, модуль управления) оснащена алгоритмом обнаружения источников УФ-излучения в поле зрения видеокамеры, предпочтительно установленной в центре размеченного места посадки.
Автономная станция (вычислительный модуль, модуль управления) оснащена алгоритмом выбора приоритетного объекта для посадки, среди всех видимых источников УФ-излучения в поле зрения видеокамеры, установленной в центре посадочной платформы.
Автономная станция может быть (вычислительный модуль, модуль управления) оснащена алгоритмом управления БПЛА для вывода БПЛА в зону видимости посадочной площадки с использованием оптоэлектронных средств, установленных на борту БПЛА.
БПЛА оснащен источником лазерного УФ-излучения, работающим на частоте возбуждения люминофора, которым выполнена разметка (навигационный рисунок) места посадки (посадочной площадки); подсветка лазерным рассеянным пучком светоотражающей разметки на платформе нужна для последующего распознавания разметки через камеру БПЛА для последующей корректировки координат посадки.
БПЛА предпочтительно оснащен видеокамерой с полем зрения 20 градусов и узкополосным оптическим фильтром, работающим на частоте флуоресцентного излучения люминофора навигационного рисунка автономной станции дозаправки.
БПЛА предпочтительно оснащен вычислительным модулем, включающим алгоритм распознавания разметки, при этом алгоритм представляет собой заранее обученную нейронную сеть каскадной архитектуры (алгоритм распознавания разметки предпочтительно представляет собой ранее обученную нейронную сеть с 28 нейронами глубиной в 8 слоев, что позволяет минимально использовать вычислительные возможности БПЛА).
Вычислительный модуль БПЛА предпочтительно содержит алгоритм уточнения своего местоположения в пространстве относительно навигационного рисунка (оригинальная разметка, не встречающаяся в окружающей среде, позволяет быстро производить обнаружение цели).
БПЛА предпочтительно оснащен алгоритмом определения высоты относительно посадочной платформы с использованием оптического канала видеонаблюдения.
БПЛА оснащен катушкой, в которой с помощью внешнего магнитного поля, генерируемого автономной станцией дозаправки, возбуждается электрический ток, служащий для зарядки аккумуляторов БПЛА (использование наведенного магнитного поля для подзарядки (заправки) БПЛА позволяет без высокой точности производить посадку на платформу).
Осуществление изобретения поясняется с помощью чертежей.
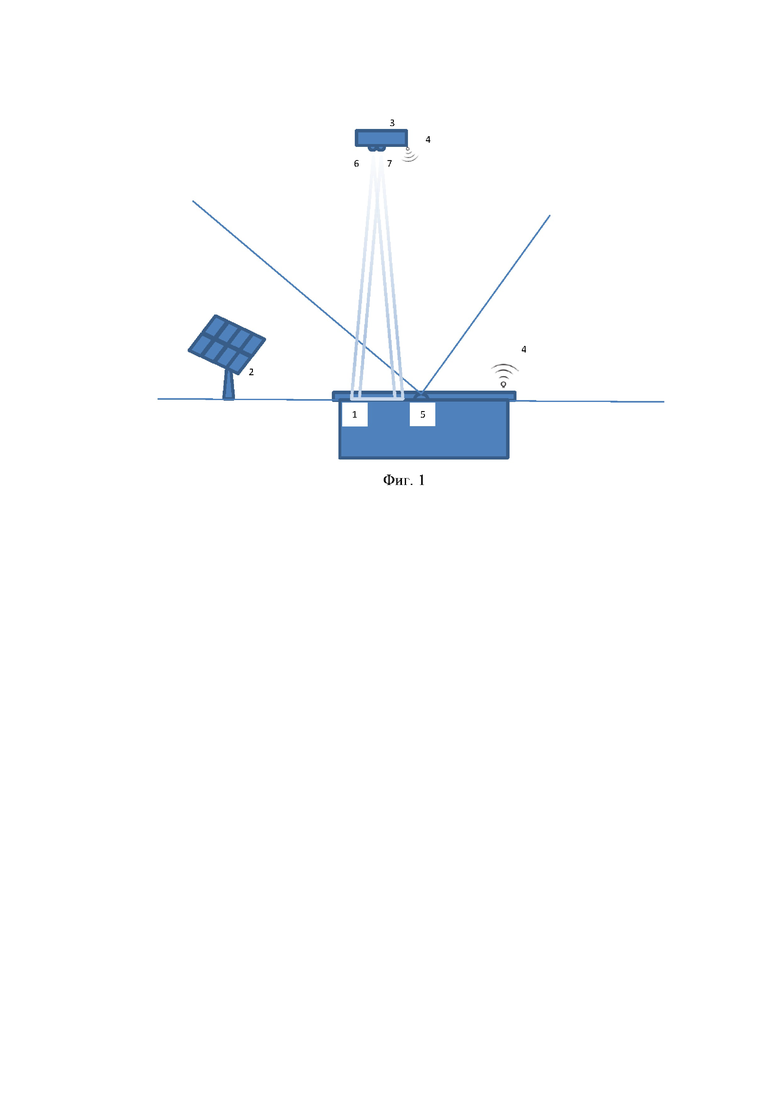
На фигуре 1 показана общая конфигурация автономной станции дозаправки БПЛА. Чертеж описывает конфигурацию системы при посадке и отображает ее основные элементы: 1 – автономная станция, 2 – панель солнечной батареи, 3 – БПЛА в воздухе при заходе на посадку, 4 – канал радиосвязи, 5 – УФ-видеокамера автономной станции 1 БПЛА 3 с узкополосными фильтром, настроенным на частоту флуоресцентного излучения разметки (навигационного рисунка) посадочной площадки и с полем зрения 90 градусов, 6 – источник лазерного УФ-излучения с рассеивателем, 7 – УФ-видеокамера на борту БПЛА 3 с узкополосным фильтром и полем зрения 20 градусов.
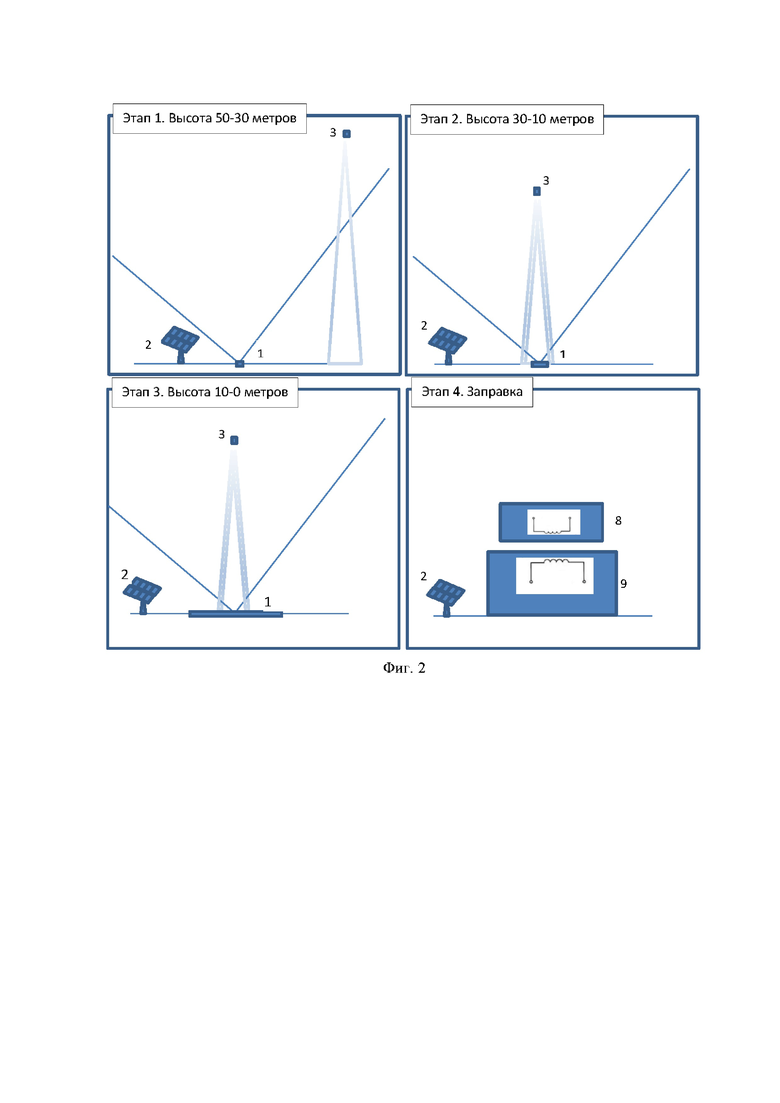
На фигуре 2 показаны этапы выполнения операции посадки и автоматической зарядки БПЛА.
Посадка и дозаправка БПЛА 3 осуществляется в 4 этапа: 1-й этап выход БПЛА 3 в зону видимости видеокамеры автономной станции 1 с использованием штатной навигационной системы на базе GPS/ГЛОНАСС. Высота полета БПЛА 3 должна составлять 30-50 м над уровнем посадочной площадки. Войдя в эту зону, БПЛА 3 с использованием радиоканала ищет локальную вычислительную сеть, поддерживаемую автономной станцией дозаправки и регистрируется в ней, включает ультрафиолетовый источник излучения и передает свои координаты автономной станции 1 дозаправки по локальной вычислительной сети. Автономная станция 1, с использованием средств оптического наблюдения находит источник УФ-излучения и, если это возможно, выдает сигнал БПЛА 3 «посадка разрешена». Получив этот сигнал БПЛА 3 передает управление полетным контроллером автономной станции 1, включает лазер 6, для возбуждения флуоресцентного излучения посадочной площадки и включает алгоритм поиска посадочной площадки (Фигура 4). Ориентируясь на изображения оптического канала, автономная станция 1 корректирует местоположение БПЛА 3 таким образом, чтобы посадочная площадка попала в поле зрения видеокамеры 7 БПЛА 3. В момент обнаружения изображения посадочной площадки БПЛА 3 передает автономной станции 1 команду «площадка обнаружена». Автономная станция 1 передает управление полетному контроллеру (вычислительному модулю) БПЛА 3. БПЛА 3 непрерывно выполняет поиск посадочной площадки и вычисляет смещение ее центра и высоту своего полета, на основании этой информации он непрерывно формирует команды полетному контроллеру корректировать местоположение БПЛА 3 таким образом, чтобы изображение посадочной площадки находилось в центре поля зрения видеокамеры БПЛА 3. При достижении высоты менее 10 м над уровнем посадочной площадки БПЛА 3 переходит в третий режим (этап) посадки, включая алгоритм измерения диаметра посадочного круга разметки, продолжая корректировать полет таким образом, чтобы центр посадочного круга совпадал с центром поля зрения камеры 7, а видимый диаметр посадочного круга (разметки) увеличивался. При достижении высоты БПЛА 3 над посадочной площадкой менее 0.5 метра БПЛА 3 передает команду автономной станции 1 «посадка завершена». Получив эту команду, автономная станция 1 переходит к четвертому этапу процедуры, передаче энергии посредством магнитного поля (катушки 8 и 9) на БПЛА 3. При этом БПЛА 3 передает автономной станции 1 информацию о состоянии зарядного устройства и уровне заряда. При достижении заданного уровня заряда БПЛА 3 передает автономной станции 1 команду «зарядка завершена» и осуществляет взлет с посадочной платформы с включенным источником УФ-излучения. Автономная станция 1, с помощью встроенной видеокамеры 5 контролирует полет БПЛА 3 до тех пор, пока источник излучения 6 находится в ее поле зрения. При исчезновении источника 6 УФ-излучения, связанного с БПЛА, 3 посадочная платформа разрывает соединение по радиоканалу с БПЛА и переходит в режим ожидания.
На фигуре 3 показана структурная схема системы автономной станции БПЛА.
Схема состоит из двух частей: автоматической станции 1 и мультироторного БПЛА 3. В дополнении к стандартному оборудованию БПЛА 3 оснащен микрокомпьютером (вычислительным модулем) 10 для установления связи с автономной станцией 1 и выполнения поиска посадочной площадки автономной станции 1 в УФ-диапазоне, источником УФ-излучения 6 для возбуждения флуоресценции разметки 11, видеокамерой 7 с узкополосным фильтром с полем зрения 20 градусов, работающем в диапазоне флуоресцентного излучения, контроллером заряда аккумуляторной батареи 12, и катушкой 8 для приема электромагнитной энергии. Автономная система дозаправки включает аккумуляторную батарею 13, контроллер 14 заряда аккумуляторной батареи 13, источник питания аккумуляторной батареи (солнечную панель 2), контроллер заряда (контроллер дозаправки 15), катушку 9 для передачи электромагнитной энергии на БПЛА 3, микрокомпьютер (вычислительный модуль 16) для установления связи с БПЛА 3, посадочной площадки с разметкой 11, нанесенной флуоресцирующей краской и УФ-видеокамерой 5 с полем зрения 90 градусов, оснащенной узкополосным фильтром, для обнаружения и управления БПЛА в полете.
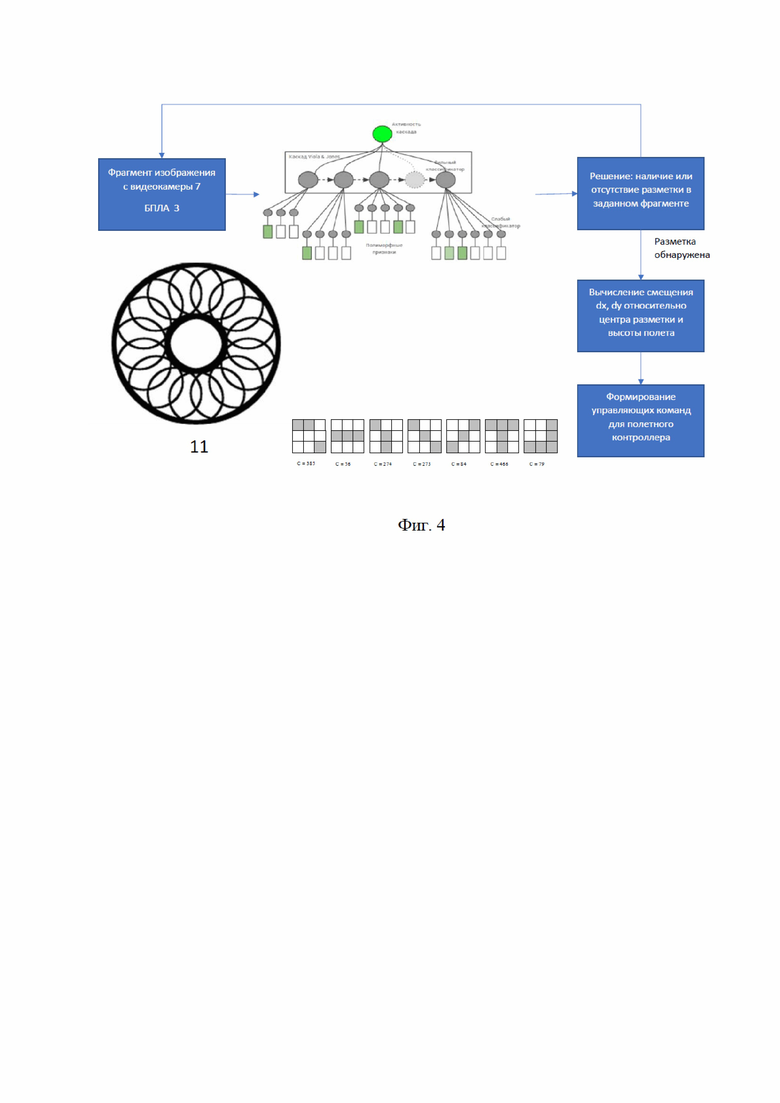
На фигуре 4 показано изображение навигационного рисунка (разметки 11) на посадочной площадке и блок схема алгоритма поиска посадочной площадки. В качестве разметки 11 (навигационного рисунка, маркера) использован центрально-симметричный рисунок, обладающий следующими свойствами:
Уникальный рисунок маркера должен снижать вероятность ошибки первого рода (ложных срабатываний) в большинстве случаев.
Вид маркера не должен зависеть от азимута захода на посадку летательного аппарата.
Для обнаружения разметки 11 на посадочной площадке используется базовый подход, основанный на каскадном детекторе. Суть алгоритма обнаружения заключается в разбиении поступающего изображения на множество прямоугольных фрагментов различных размеров и выполнении операции детектирования объекта для каждого из полученных фрагментов. В данном случае поступающее изображение разбивается на 42441 фрагмента, с размерами от 24 × 24 пикселя до 480 × 480 пикселей и в каждом из этих фрагментов выполняется процедура детектирования посадочного шаблона.
Формирование кодового описания участка изображения с использованием нелокальных бинарных шаблонов: произвольный фрагмент изображения прямоугольной формы разбивается на девять прямоугольных фрагментов. Признаки определяются как ядро, размером 3 × 3 элемента, отражающее пространственную структуру изображения. Внутри ядра применятся бинарное кодирование информации {0,1} и результирующие бинарные шаблоны могут представлять собой границы, отрезки, седловые точки, точки соединения и так далее. На решётке, размером 3 × 3 элемента существуют 512 подобных ядер (фигура 4).
Детектирование выполняется с использованием каскадного детектора, состоящего из набора сильных классификаторов, соединенных последовательно. В случае, если все сильные классификаторы примут решение о наличии в тестируемом фрагменте искомого изображения, то принимается решение о том, что навигационный рисунок найден. Основываясь на знаниях о параметрах оптической системы, установленной на БПЛА и известных геометрических размерах навигационного рисунка на посадочной площадке и размерах фрагмента изображения, в котором он был детектирован, легко производится оценка высоты полета и величины смещения БПЛА относительно центра посадочной площадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДОЧНУЮ ПЛАТФОРМУ | 2019 |
|
RU2722521C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |

Изобретение относится к оборудованию для беспилотных летательных аппаратов (БПЛА) мультироторного типа. Система автоматической дозаправки беспилотного летательного аппарата содержит платформу, вычислительный модуль, модуль управления, систему крепления БПЛА и модуль питания. Модуль управления выполнен с возможностью связи с БПЛА. Платформа выполнена в виде автономной станции (1). Место посадки БПЛА на платформе обозначено разметкой. На платформе установлена УФ-камера (5). Модуль питания включает аккумуляторную батарею (2) и катушки для создания переменного магнитного поля для бесконтактной дозаправки. Достигается обеспечение точной посадки БПЛА, бесконтактной автономной подзарядки БПЛА, в том числе в условиях автономной генерации энергии с использованием солнечной батареи. 5 з.п. ф-лы, 4 ил.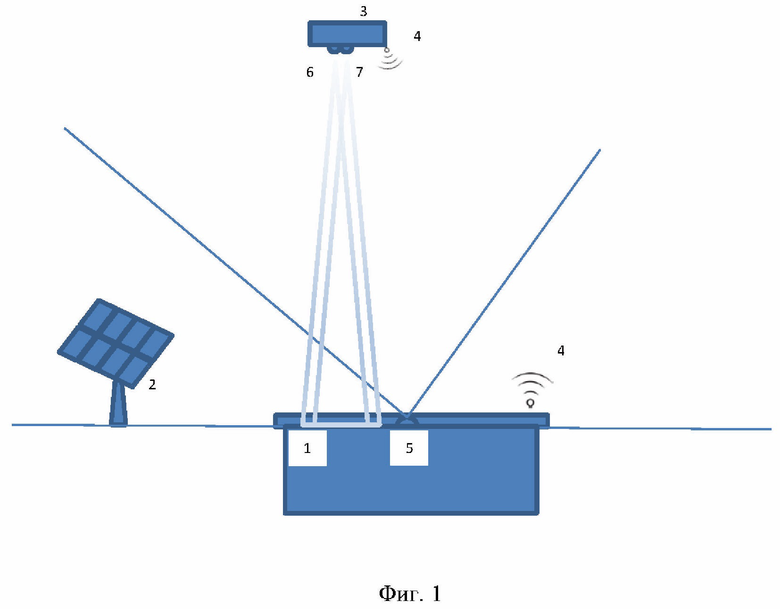
1. Система автоматической дозаправки по меньшей мере одного беспилотного летательного аппарата (БПЛА), содержащая платформу, вычислительный модуль, модуль управления, выполненный с возможностью связи с БПЛА, систему крепления БПЛА и модуль питания, отличающаяся тем, что платформа выполнена в виде автономной станции, место посадки БПЛА на платформе обозначено разметкой, на платформе установлена УФ-камера, модуль питания включает аккумуляторную батарею и катушки для создания переменного магнитного поля для бесконтактной дозаправки.
2. Система по п. 1, отличающаяся тем, что аккумуляторная батарея связана с солнечными панелями.
3. Система по п. 1, отличающаяся тем, что разметка на платформе выполнена с использованием цветного люминофора, возбуждаемого УФ-излучением.
4. Система по п. 1, отличающаяся тем, что вычислительный модуль автономной станции оснащен алгоритмом обнаружения источников УФ-излучения в поле зрения видеокамеры.
5. Система по п. 1, отличающаяся тем, что вычислительный модуль автономной станции оснащен алгоритмом выбора приоритетного объекта для посадки, среди всех видимых источников УФ-излучения в поле зрения видеокамеры, установленной в центре посадочной платформы.
6. Система по п. 1, отличающаяся тем, что вычислительный модуль автономной станции оснащен алгоритмом управления БПЛА для вывода БПЛА в зону видимости посадочной площадки с использованием оптоэлектронных средств, установленных на борту БПЛА.
| Р. И. Ц И. И. Жилевич, А. С. Касаткин, Г. И. Мицевичус, Э. А. ЛГ. 3. Рейцман, В. X. Сас, А. С. Таурайтис, Г. Л. ТрапезАикЖ^^^Пи'чЕСНДЯJL^y^TUiiluG- VdHjpHMac,П. А. Халезов, В. Г. Чепенко, Т. В. Чепенко, И. С. Uliи Д. П. ЛапенисВСЕСОКЬЛДЯ12^''^«'^eg^bJi'-iJ' | 0 |
|
SU199157A1 |
| СПОСОБ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593207C1 |
| Способ подзарядки аккумуляторов в беспроводной сенсорной сети | 2020 |
|
RU2730468C1 |
| WO 2017029611 A1, 23.02.2017 | |||
| US 2018162555 A1, 14.06.2018 | |||
| KR 101973148 B1, 26.08.2019. | |||

