Изобретение относится к узлам крепления компонентов конструкции преимущественно, для крепления космических объектов при внекорабельной деятельности.
Известны фиксаторы с вытяжной ручкой для применения в делительных приспособлениях (ГОСТ 13160-67 в ред. 1990 г.). Данные фиксаторы предназначены только для фиксации углового положения различных приспособлений, положений в направляющих и т.п.и не обеспечивают одновременное закрепление, стяжку объектов и фиксацию. Для крепления космических объектов при внекорабельной деятельности необходима минимизация конструктивных элементов и соответственно массы и обеспечение выполнения операций космонавтом, желательно одной рукой, чтобы не проводить закрепление космонавта на объекте. Конструкция узла крепления должна исключать возможность потери крепежных элементов.
Наиболее близким техническим решением является конструкция винтов с предохранением от отвинчивания (Детали машин. Атлас конструкций в двух частях. Под общей редакцией Д.Н. Решетнева. Часть 1. Москва. Машиностроение 1992 г., ст.73, рис.3в). В данной конструкции исключается возможность потери крепежного элемента, однако отсутствует его стопорение. Представленная конструкция не фиксируется в исходном положении, когда торец винта не должен выступать за торец стыкуемой конструкции.
Задачей изобретения является создание узла крепления двух объектов с минимальной массой, при этом конструкция должна исключать возможность потери крепежных элементов, которые при этом не должны выступать за границы соединяемых объектов до выполнения крепления, не должны мешать при стыковке объектов и одновременно должно обеспечиваться стопорение от отвинчивания при динамических нагрузках.
Техническим результатом предлагаемой конструкции является обеспечение при ручных операциях фиксированного положения устройства крепления перед закреплением объектов, исключающего потерю крепежных элементов, не мешающих при стыковке объектов, а также обеспечивается стопорение от отвинчивания при динамических нагрузках, помимо этого обеспечивается удобство при захвате резьбы и стягивании.
Сущность изобретения заключается в том, что в узле крепления двух объектов, установленного в сквозной канал одного объекта, содержащего шпильку с винтовой резьбой на одном конце и упор на другом конце, шпилька снабжена пружиной сжатия и на ней выполнены n продольных пазов (n=1, 2…) между упором и резьбой, а также введен подпружиненный фиксатор в виде шарика, установленный в цилиндрическом углублении, выполненном в стенке сквозного канала одного объекта, на расстоянии от входного отверстия канала этого объекта, превышающим сумму расстояния от упора до начала продольных пазов шпильки и радиуса шарика, но меньше разности расстояния от упора до конца продольных пазов шпильки и радиуса шарика, взаимодействующего с одним из пазов шпильки, при этом на шпильке со стороны резьбы выполнена кольцевая проточка на расстоянии от торца шпильки меньшем расстояния от плоскости соединения объектов до цилиндрического углубления, а также выполнена ответная резьба в корпусе другого объекта.
Сущность изобретения поясняется чертежами.
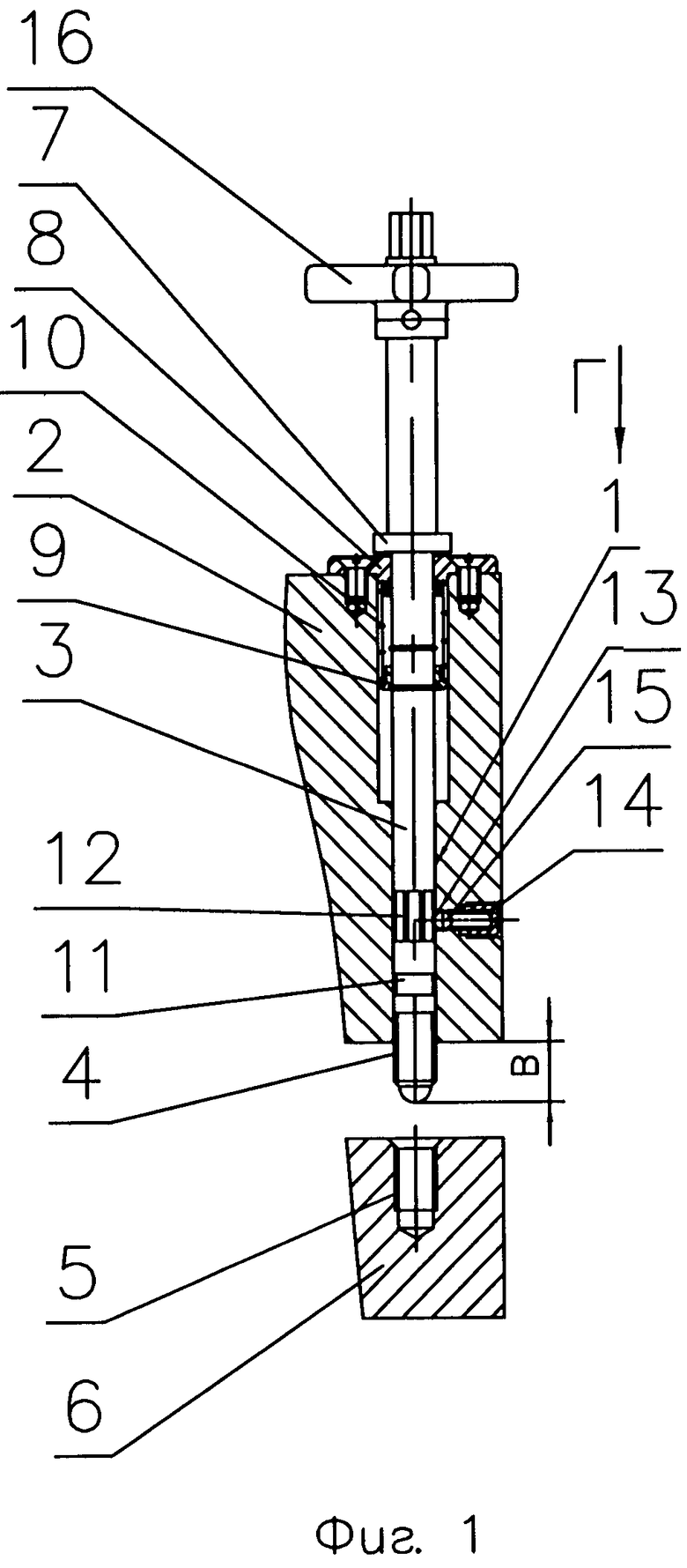
На фиг.1 изображен узел крепления, установленный в одном объекте, и второй объект до стыковки.
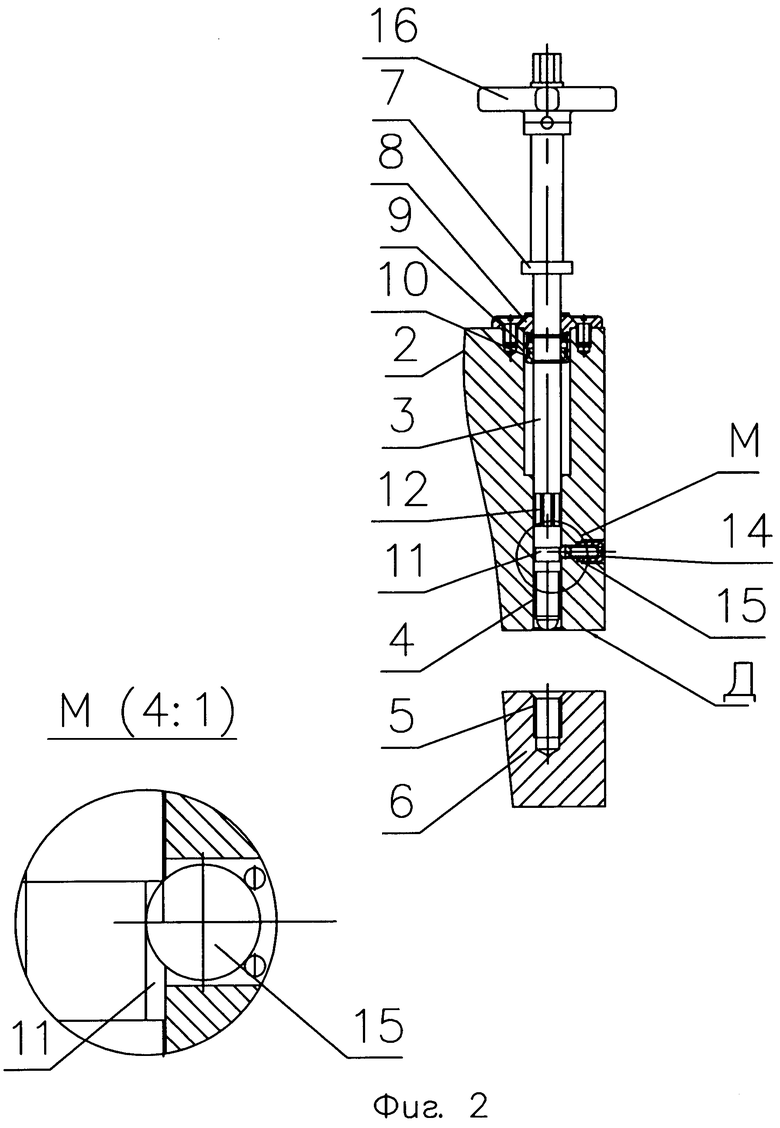
На фиг.2 изображен узел крепления, установленный в одном объекте, и второй объект перед стыковкой объектов.
На фиг.3 изображен узел крепления после стыковки объектов после расфиксации шпильки в момент перед захватом резьбы.
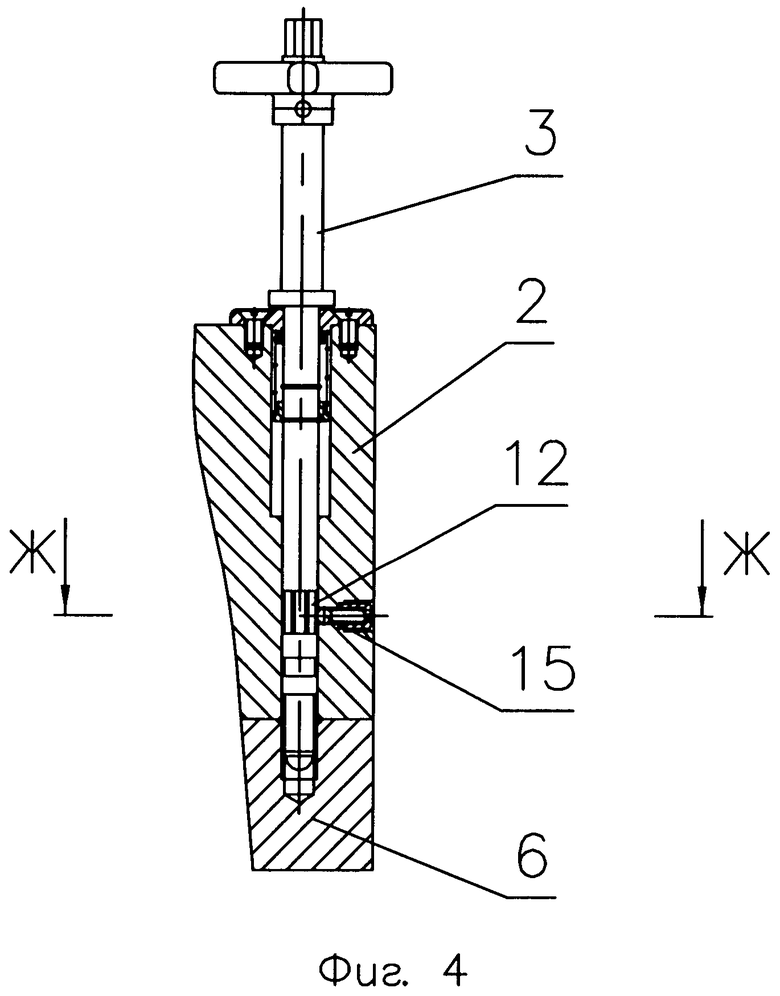
На фиг.4 изображен узел крепления после закрепления объектов.
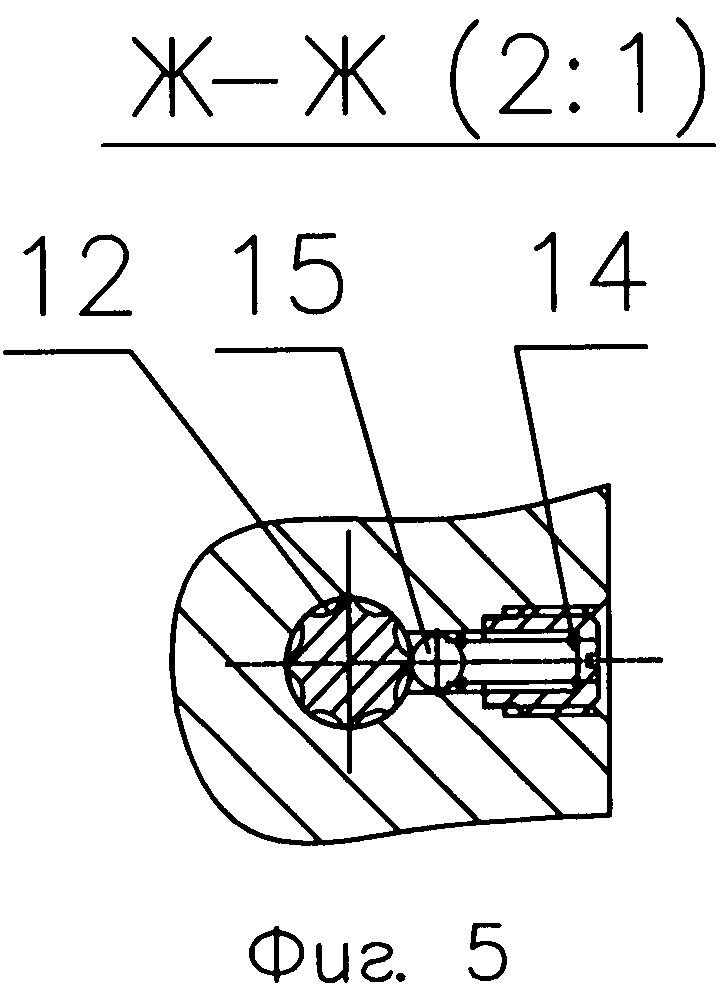
На фиг.5 изображено поперечное сечение шпильки в положении устройства крепления после закрепления объектов.
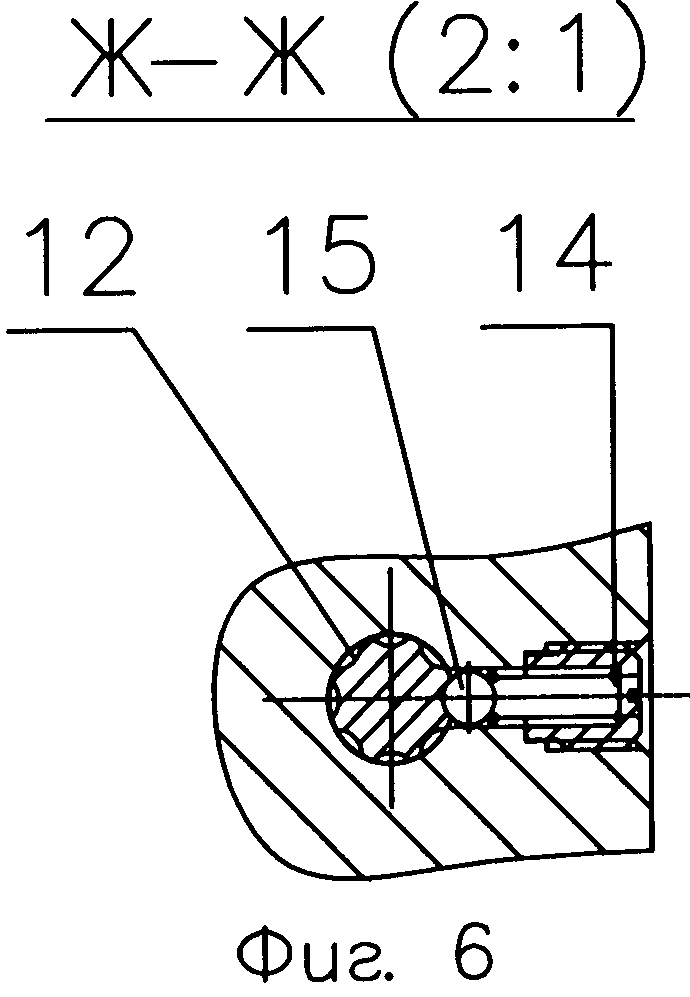
На фиг.6 изображено поперечное сечение шпильки в положении узла крепления после закрепления объектов при взаимодействии фиксатора с продольным пазом (нахождении шарика в пазе).
Узел крепления двух объектов, установленный в сквозной канал 1 корпуса 2 (см. фиг.1) одного объекта, состоит из шпильки 3 с резьбой 4, входящей в гнездо 5 с резьбой в корпусе 6 другого объекта. С другой стороны шпильки 3 выполнен упор 7, взаимодействующий с шайбой 8, установленной в корпусе 2. На шпильку 3 надето кольцо 9, и между этим кольцом 9 и упором 7 установлена пружина сжатия 10. На шпильке 3 после резьбы выполнена кольцевая проточка 11 и продольные пазы 12. В корпус 2 в цилиндрическом углублении 13, установлен подпружиненный пружиной 14 фиксатор в виде шарика 15. Цилиндрическое углубление 13 выполнено из сквозного канала 1, при этом расстояние от его центра до поверхности корпуса 2, взаимодействующей с упором 7, превышает сумму расстояния от упора 7 до начала продольных пазов 12 шпильки и радиуса шарика, но меньше разности расстояния от упора 7 до конца продольных пазов 12 шпильки и радиуса шарика. Шарик 15 взаимодействует с пазами 12 шпильки 3. Кольцевая проточка 11 выполнена на расстоянии от торца шпильки меньшем расстояния от плоскости соединения корпусов 2 и 6 до цилиндрического углубления 13. Для перемещения и вращения шпильки 3 на ней закреплен маховик 16.
В исходном положении (фиг.1) после раскрепления корпуса 2, например с местом закрепления на аппарате выведения и доставки, шпилька 3 с резьбой на конце выступает над корпусом 2 на расстояние В, меньшее расстояния от кольцевой проточки 11 до продольных пазов 12. Для закрепления корпусов объектов значительных габаритов и массы узлов крепления должно быть расчетное количество N.
Для проведения стыковки космонавт перемещает за маховик 16 шпильку 3 против стрелки Г до упора кольца 9 в шайбу 8 на расстояние большее В, при этом шарик 15 попадает в кольцевую проточку 11. После снятия усилия шпилька 3 перемещается на небольшое расстояние обратно до упора шарика 15 в край кольцевой проточки 11 и удерживается в этом положении (фиг.2). За счет того, что кольцевая проточка 11 выполнена на расстоянии от торца шпильки меньшем расстояния от плоскости соединения корпусов 2 и 6 до цилиндрического углубления 13, шпилька 3 не выступает за габариты корпуса 1 относительно торца Д.
Удержание шпильки 3 в положении перед стыковкой согласно фиг.2 обеспечивают заданные требуемые усилия пружин 10 и 14 и разложение сил от пружины 14 по боковой поверхности кольцевой проточки 11, при этом усилие пружины 10 должно быть меньше 5 кгс. Рекомендуемые усилия при работе космонавта при внекорабельной деятельности должны быть не более 5 кгс.
После данной операции корпуса 2 и 6 с помощью известных элементов центрирования и стягивания (в данном описании не приводится) центрируются и стыкуются до соприкосновения плоскостями, затем идет предварительное закрепление. Утопленные за плоскость корпуса 2 концы шпилек 3 с резьбой не мешают проведению операций центрирования, стыковки и предварительного закрепления. (При состыковке с помощью элементов крепления как в прототипе, они будут занимать произвольное положение, выступать за корпус и мешать точной состыковке. Кроме того в прототипе они могут привести к повреждению ответных частей стыкуемых объектов резьбовыми выступающими частями). Шпилька 3 и гнездо 5 корпуса 6 располагаются соосно друг другу. Шпилька 3 своим резьбовым концом не выступает за плоскость корпуса 2. При нажатии космонавтом по стрелке Г на маховик 16 шпилька 3 перемещается, при этом шарик 15 сжимает пружину 14 и перемещается в сторону пружины, выходит из кольцевой проточки 11 и попадает на цилиндрическую поверхность шпильки 3. После снятия усилия с маховика 16 шпилька 3 перемещается пружиной 10 по стрелке Г до упора в гнездо 5 корпуса 6 (фиг.3), так как шарик 15 после выхода из кольцевой проточки 11 оказывает незначительное усилие от пружины 14 вдоль боковой поверхности шпильки 3 (усилие трения). При повороте маховика 16 за счет поджатая шпильки 3 происходит захват резьбы, и шпилька 3 ввинчивается до соприкосновения упора 7 с шайбой 8. При ввинчивании шпильки 3 она перемещается относительно фиксатора в виде шарика 15, который оказывается в зоне напротив продольных пазов 12. При последних до упора поворотах шпильки 3 шарик 15 попадает в продольные пазы 12 и перекатывается по ним за счет прикладываемого момента. За счет того, что расстояние от центра цилиндрического углубления 13, выполненного из сквозного канала 1, до взаимодействующей с упором 7 поверхности корпуса 2 больше суммы расстояния от упора 7 до начала продольных пазов 12 шпильки и радиуса шарика, но меньше разности расстояния от упора 7 до конца продольных пазов 12 шпильки и радиуса шарика, шарик находится напротив продольных пазов 12 при стянутых узлом крепления корпусах 2 и 6. После выбора зазоров и натяга по резьбе за счет прикладываемого момента создается усилие прижатия между корпусами 2 и 6 (фиг.4). Шарик 15, расположенный в зоне напротив продольных пазов 12, может как попасть в продольные пазы так и может оказаться на цилиндрической поверхности (фиг.5). При возникновении динамических нагрузок (вибрации) шпилька 3 провернется на незначительный угол в обратную сторону и шарик 12 попадет в один из продольных пазов 12 (фиг.6). За счет небольшого угла поворота и значительного натяга по резьбе усилие прижатия корпусов практически не уменьшится, т.е. шарик 15 стопорит шпильку 3 от дальнейшего отвинчивания при воздействии динамических нагрузок. Взаимосвязь размеров диаметра шпильки 3, радиуса шарика 15, количества и глубины продольных пазов 12, размеров кольцевой проточки определяется прочностными расчетами, уровнем динамических воздействий и другими конструктивными параметрами. Например, в реализованной конструкции количество продольных пазов 8, диаметр шпильки 12 мм, радиус шарика 2,5 мм, радиус продольных пазов 2,5 мм, глубина продольных пазов 1 мм, диаметр кольцевой проточки 10,5 мм.
Фиксатор в виде шарика 15 выполняет две функции, обеспечивая фиксированное положение шпильки 3 перед стыковкой и стопорение ее от отвинчивания при воздействии вибрационных нагрузок после завинчивания.
Таким образом, предлагаемая конструкция обеспечивает при ручных операциях при стыковке космических объектов фиксированное положение узла крепления перед закреплением корпусов, не препятствующего и не мешающего стыковке объектов, а также обеспечивается стопорение от отвинчивания при динамических нагрузках, помимо этого обеспечивается удобство при захвате резьбы и стягивании.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАНИМАЦИИ АВАРИЙНЫХ СКВАЖИН С ЗАМЕНОЙ НЕГЕРМЕТИЧНОЙ ВЕРХНЕЙ ЧАСТИ ОБСАДНОЙ КОЛОННЫ И СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ТРУБ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249091C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ТРУБОПРОВОДОВ ДВУХ ОБЪЕКТОВ | 2013 |
|
RU2535814C1 |
| Гайка с механизмом блокировки скручивания | 2023 |
|
RU2821692C1 |
| Патрон к механизированным ручным инструментам | 1981 |
|
SU1061980A1 |
| РЕЗЬБОВОЕ СОЕДИНЕНИЕ ОТСЕКОВ КОРПУСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2334135C1 |
| Электрический соединитель | 1987 |
|
SU1417089A1 |
| УСТРОЙСТВО РАЗДЕЛЕНИЯ ПЛАВУЧЕГО ПРИБОРА НА ГЕРМЕТИЧНЫЕ ОТСЕКИ | 2019 |
|
RU2705722C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ТРУБОПРОВОДОВ | 1998 |
|
RU2143629C1 |
| ЗАМОК ПРОТИВОУГОННОГО УСТРОЙСТВА | 2008 |
|
RU2377147C1 |
| УСТЬЕВОЕ ОБОРУДОВАНИЕ СКВАЖИНЫ "ПЕРМЬ" (ВАРИАНТЫ) | 2005 |
|
RU2269641C1 |

Изобретение относится к узлам крепления компонентов конструкции, преимущественно для крепления космических объектов при внекорабельной деятельности, и направлено на обеспечение исключения потерь крепежных элементов, а также обеспечение стопорения крепежного элемента при динамических нагрузках и на удобство при захвате резьбы и стягивании. Узел крепления двух объектов, установленный в сквозной канал одного объекта, содержит шпильку с винтовой резьбой на одном конце и упор на другом конце. Шпилька снабжена пружиной сжатия и на ней выполнены n продольных пазов (n=1, 2…) между упором и резьбой, а также введен подпружиненный фиксатор в виде шарика, установленный в цилиндрическом углублении, выполненном в стенке сквозного канала одного объекта, на расстоянии от входного отверстия канала этого объекта, превышающем сумму расстояния от упора до начала продольных пазов шпильки и радиуса шарика, но меньше разности расстояния от упора до конца продольных пазов шпильки и радиуса шарика, взаимодействующего с одним из пазов шпильки. На шпильке со стороны резьбы выполнена кольцевая проточка на расстоянии от торца шпильки, меньшем расстояния от плоскости соединения объектов до цилиндрического углубления, а также выполнена ответная резьба в корпусе другого объекта. 6 ил.
Узел крепления двух объектов, установленный в сквозной канал одного объекта, содержащий шпильку с винтовой резьбой на одном конце и упор на другом конце, отличающийся тем, что шпилька снабжена пружиной сжатия и на ней выполнены n продольных пазов (n=1, 2…) между упором и резьбой, а также введен подпружиненный фиксатор в виде шарика, установленный в цилиндрическом углублении, выполненном в стенке сквозного канала одного объекта, на расстоянии от входного отверстия канала этого объекта, превышающим сумму расстояния от упора до начала продольных пазов шпильки и радиуса шарика, но меньше разности расстояния от упора до конца продольных пазов шпильки и радиуса шарика, взаимодействующего с одним из пазов шпильки, при этом на шпильке со стороны резьбы выполнена кольцевая проточка на расстоянии от торца шпильки меньшем расстояния от плоскости соединения объектов до цилиндрического углубления, а также выполнена ответная резьба в корпусе другого объекта.
| Устройство аналого-цифрового преобразования | 1983 |
|
SU1188890A1 |
| JP 2003191172 A, 08.07.2003 | |||
| СПОСОБ СОЗДАНИЯ БИОЛОГИЧЕСКОЙ МОДЕЛИ АЛЛЕРГИИ К СТАФИЛОКОККОВОМУ АЛЛЕРГЕНУ | 2009 |
|
RU2405146C1 |
| CN 202251328 U1, 30.05.2012 | |||
| Ударное устройство | 1985 |
|
SU1416610A1 |

