Изобретение относится к области управляемого оружия и может быть одновременно использовано при решении задач поражения наземных станций активных помех (САП) самолетным бортовым РЛС (БРЛС) с применением самонаводящегося по радиоизлучению оружия (СНО) и для управления полетом СНО при нанесении ударов по наземным САП, создающим ответные активные помехи работающим бортовым РЛС самолетов.
Наземные САП противника представляют собой эффективные средства противодействия бортовым РЛС ударных самолетов и поэтому являются первоочередными объектами огневого поражения в ходе ведения боевых действий. Наиболее эффективным средством огневого поражения радиоизлучающих средств, как показывает опыт локальных войн и конфликтов, является самонаводящееся по радиоизлучению оружие (авиационные управляемые ракеты, беспилотные летательные аппараты (БЛА), управляемые авиабомбы и др.). Поэтому задача поражения САП является важнейшей задачей радиоэлектронной борьбы (РЭБ) в операциях и боевых действиях объединений (соединений) военно-воздушных сил (ВВС). В ВВС задачи поражения наземных САП противника могут решаться, в первую очередь, с применением самонаводящихся по радиоизлучению ракет и БЛА [Палий А.И. Радиоэлектронная борьба. 2-е изд.. перераб. и доп. - М.: Воениздат, 1989, с.313-316].
Известен способ поражения наземных радиоэлектронных средств (РЭС) различного назначения самонаводящимся по радиоизлучению оружием, основанный на использовании электромагнитного излучения этих РЭС, необходимого им для выполнения своего функционального назначения, путем приема сигналов РЭС антенной системой СНО, захвата сигналов РЭС на сопровождение пассивной радиотехнической головкой самонаведения (ПРГС) СНО и наведения СНО на цель в процессе полета по командам, формируемым в ПРГС по измеряемым значениям угловых координат РЭС, и поступающих в автопилот, управляющий рулевыми приводами СНО для изменения его траектории полета к РЭС-цели в соответствии с используемым законом самонаведения [Добыкин В.Д, Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. - М.: Вузовская книга, 2007, с.388].
Наиболее близким по сущности и достигаемому эффекту является способ поражения наземных радиоэлектронных средств, включая РЛС и САП самолетным БРЛС, самонаводящимся по радиоизлучению оружием включающий прием сигналов САП антенной системой СНО, находящегося на подвеске под носителем, захват сигналов САП на сопровождение пассивной радиотехнической головкой самонаведения (ПРГС) СНО, определение ПРГС угловой скорости линии визирования САП, пуск самонаводящегося по радиоизлучению оружия и полет к цели по командам, формируемым в ПРГС по измеряемым значениям угловой скорости линии визирования САП и преобразуемых в автопилоте в сигналы управления рулевыми приводами СНО, изменяющими положение аэродинамических рулей, приводящих к изменению его траектории полета к цели (станции активных помех) в соответствии с используемым законом самонаведения [Палий А.И. Радиоэлектронная борьба: Средства и способы подавления и защиты радиоэлектронных систем. - М.: Воениздат, 1981, с.136-138]. Этот способ принят в дальнейшем за прототип.
Известна система для осуществления способа поражения РЭС (в том числе и наземных САП) самонаводящимся по радиоизлучению оружием, содержащая антенный блок, ПРГС, и последовательно соединенные автопилот, электромеханический рулевой привод, и аэродинамические рули [Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. - М.: Вузовская книга, 2007, с.418].
Наиболее близкой по технической сущности и достигаемому эффекту является система для осуществления способа поражения наземных станций активных помех бортовым РЛС самонаводящимся по радиоизлучению оружием, содержащая антенную систему (АС), ПРГС, блок формирования команд наведения (БФКН) и последовательно соединенные автопилот (АЛ), рулевые приводы (РП), работающие на газе турбогенераторного источника питания, и аэродинамические рули (АР) [Палий А.И. Радиоэлектронная борьба. Средства и способы подавления и защиты радиоэлектронных систем. - М.: Воениздат, 1981, с.125-126]. Эта система принята в дальнейшем за прототип.
Основным недостатком этих способа и системы для его осуществления является то, что для своевременного вскрытия группировки САП и их уничтожения до выхода ударных самолетов на рубеж применения оружия требуется либо преждевременное включение на излучение БРЛС самолетов ударной группы, что ведет к демаскированию направления удара и боевого порядка авиации, либо введение в состав боевых порядков группы обеспечения специальных самолетов, провоцирующих своими БРЛС непрерывную работу САП, что крайне нежелательно, так как при ограниченном ресурсе авиации приводит к уменьшению числа ударных самолетов, а также не обеспечивается высокая вероятность поражения САП, защищаемых, как правило, с использованием отвлекающих устройств (дополнительных источников излучения (ДИИ), маскирующих боковое излучение САП).
Технической задачей настоящего изобретения является повышение вероятности поражения САП одним средством СНО без снижения скрытности и боевых возможностей ударной группы за счет возложения функции провоцирования непрерывной работы САП на СНО с ПРГС и обеспечения самонаведения СНО на САП по главному лучу диаграммы направленности ее антенны (ДНА).
1. Поставленная задача решается за счет того, что в способе поражения наземных САП бортовым РЛС самолетов самонаводящимся по радиоизлучению оружием, включающем прием сигналов САП антенной системой СНО, находящегося на подвеске под носителем, захват сигналов САП на сопровождение пассивной радиотехнической головкой самонаведения (ПРГС) СНО, определение ПРГС угловой скорости линии визирования САП, пуск самонаводящегося по радиоизлучению оружия и полет к цели по командам, формируемым в ПРГС по измеряемым значениям угловой скорости линии визирования САП и преобразуемых в автопилоте в сигналы управления рулевыми приводами СНО, изменяющими положение аэродинамических рулей, приводящих к изменению его траектории полета к цели (станции активных помех) в соответствии с используемым законом самонаведения, пуск самонаводящегося по радиоизлучению оружия производят при отсутствии излучения САП бортовым РЛС, на первом этапе его полет происходит по программе с использованием данных инерциальной навигационной системы (ИНС), на определенном рубеже, заданном перед пуском с носителя через блок связи с носителем (БСН), производят включение ПРГС в режим поиска сигналов САП по несущей частоте, длительности, периоду повторения импульсов и угловым координатам, а также включение ИПБРЛС, сигналы которого имеют параметры аналогичные параметрам сигналов бокового излучения типовых бортовых РЛС самолетов и излучаются через собственный излучатель, смонтированный на антенной системе ПРГС, провоцируя включение САП противника в режим подавления бортовой РЛС, причем во время излучения этих сигналов производят бланкирование (запирание) приемника ПРГС, а в паузах между сигналами имитатора передатчика бортовой РЛС осуществляют поиск, обнаружение и измерение параметров ответных сигналов САП пассивной радиотехнической головкой самонаведения, в блоке управления (БУ) производят сравнение параметров сигналов принятых ПРГС и излученных ИПБРЛС и при их совпадении по несущей частоте, длительности и периоду повторения импульсов формируют команды разрешения на захват цели ПРГС, на переключение наведения СНО с программного на самонаведение по сигналам ПРГС и на изменение коэффициентов передачи автопилота, после этого, на втором этапе, полет СНО производят под управлением ПРГС вплоть до поражения САП, причем начальные установки для ИНС и данные целеуказания для ПРГС и ИПБРЛС вводятся с носителя в блок связи с носителем СНО перед пуском.
2. Поставленная задача решается также за счет того, что в систему для осуществления способа поражения наземных станций активных помех бортовым РЛС самонаводящимся по радиоизлучению оружием, содержащую антенную систему, ПРГС, БФКН и последовательно соединенные автопилот, РП, работающие на газе турбогенераторного источника питания, и аэродинамические рули дополнительно введены имитатор передатчика бортовой РЛС, блок связи с аппаратурой носителя, инерциальная навигационная система (ИНС), блок управления БУ, коммутатор (К), причем управляющие входы 3 и 2 коммутатора К и автопилота соответственно соединены с первым выходом БУ, первый вход которого соединен с третьим выходом БСН, второй вход - со вторым выходом ПРГС, а третий вход - с вторым выходом ИНС, первый выход которой подключен ко второму входу коммутатора К, первый выход которого соединен с входом АП, причем первый выход ПРГС соединен с входом БФКН, выход которого соединен с первым входом коммутатора, третий выход ПРГС соединен в первым входом БСН, а четвертый вход соединен с третьим выходом БУ, второй выход которого соединен со вторым входом ИПБРЛС, первый выход которого соединен с четвертым входом БУ, второй выход соединен первым входом АС, третий выход подключен к третьему входу ПРГС, а первый вход соединен с четвертым выходом БСН, первый выход которого соединен с входом ИНС, а второй выход - с вторым входом ПРГС, первый вход которой соединен с выходом АС, причем второй вход БСН является входом, а пятый его выход - выходом системы.
Техническое решение обладает новым свойством - высокой вероятностью поражения САП одним средством СНО и возможностью обеспечения поражения наземных САП самонаводящимся по радиоизлучению оружием без снижения скрытности и боевых возможностей ударных самолетов при низком наряде средств обеспечения и СНО для поражения САП за счет возложения функции провоцирования непрерывной работы САП на СНО с ПРГС и использования в системе управления СНО дополнительного устройства- имитатора передатчика бортовой РЛС (ИПБРЛС) самолета, сопряженного с ПРГС, и обеспечивающего самонаведение СНО на САП по главному лучу диаграммы направленности ее антенны (ДНА). При этом использование режима провоцирования работы САП на борту СНО позволяет уменьшить его промах относительно САП-цели в три-десять раз по сравнению с прототипом.
На фиг.1 представлена структурная схема предлагаемой системы по п.2, реализующая предлагаемый способ по п.1. На фиг.2 приведена структурная динамическая схема самонаводящегося по радиоизлучению оружия, используемая при математическом моделировании функционирования предлагаемой по п.2. системы и оценке эффективности предлагаемого по п.1.способа поражения..
Система (фиг.1), реализующая предложенный по п.1. способ поражения САП, содержит антенную систему 1, обеспечивающую одновременный прием сигналов РЭС-целей и излучение сигналов имитатора передатчика бортовой РЛС самолета за счет использования различных антенных элементов (излучателей), выполненную в виде отражателя с размещенными на нем спиральными антеннами [Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. - М.: Вузовская книга, 2007, с.430], имитатор передатчика бортовой РЛС 2, обеспечивающий формирование радиоимпульсов, параметры которых (несущая частота, длительность и частота повторения импульсов) выбираются аналогичными параметрам сигналов самолетных БРЛС, выполненный в виде автогенератора на лампе бегущей волны (ЛБВ) с внешней обратной связью [Линде Д.П. Радиопередающие устройства. - М.: Энергия, 1974, с.151], ПРГС 3, обеспечивающую раздельное пеленгование и распознавание сигналов различных РЭС, выполненную в виде следящего пеленгатора фазового типа, измеряющего угловую скорость линии визирования цели [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964, с.143-146], блок связи с носителем 4, выполненный в цифровом виде на основе микропроцессора Intel Pentium Т4400, с поддержкой протокола передачи данных Bluetooth или стандарта IEEE 802.11, блок формирования команд наведения 5, инерциальную навигационную систему 6, выполненную в виде бесплатформенной ИНС с трехстепенным гироскопом и датчиками линейных ускорений, размещенными непосредственно на корпусе СНО [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. - М.: Транспорт, 1992, с.350], блок управления 7, выполненный в цифровом виде на основе микропроцессора Intel Pentium Т4400, коммутатор 8, выполненный, например, в виде электромагнитных или электронных реле с соответствующим числом нормально-разомкнутых (замкнутых) контактов на основе микросхемы электронного коммутатора 435КН2 [Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ. пособие. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989, 240 с.: ил. - (Массовая радиобиблиотека; вып. 1143, с.68)], автопилот 9, рулевые приводы 10 и аэродинамические рули 11, причем управляющие входы 3 и 2 коммутатора К 8 и автопилота 9 соответственно соединены с первым выходом БУ 7, первый вход которого соединен с третьим выходом БСН 4, второй вход - со вторым выходом ПРГС 3, а третий вход - с вторым выходом ИНС 6, первый выход которой подключен ко второму входу коммутатора К 8, первый выход которого соединен с входом АП 9, причем первый выход ПРГС 3 соединен с входом БФКН 5, выход которого соединен с первым входом коммутатора 8, третий выход ПРГС 3 соединен в первым входом БСН 4, а четвертый вход соединен с третьим выходом БУ 7, второй выход которого соединен со вторым входом ИПБРЛС 2, первый выход которого соединен с четвертым входом БУ 7, второй выход соединен первым входом АС 1, третий выход подключен к третьему входу ПРГС 3, а первый вход соединен с четвертым выходом БСН 4, первый выход которого соединен с входом ИНС 6, а второй выход - с вторым входом ПРГС 3, первый вход которой соединен с выходом АС 1, причем второй вход БСН 4 является входом, а пятый его выход - выходом системы.
Таким образом, заявленные способ поражения САП и система для его реализации обеспечивают решение задачи поражение наземных САП самонаводящимся по радиоизлучению оружием без снижения скрытности и боевых возможностей ударной группы и увеличение вероятности поражения САП одним средством СНО за счет возложения функции провоцирования непрерывной работы САП на СНО с ПРГС и использования в его системе управления имитатора передатчика бортовой РЛС самолета, сопряженного с ПРГС, создающего условия для самонаведения СНО на САП по главному лучу ее ДНА.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленных изобретений, позволил установить, что заявитель не обнаружил аналогов, характеризующийся признаками, тождественными всем существенным признакам предлагаемых способа поражения САП и системы управления СНО, его реализующей. Выбор из перечня выявленных аналогов прототипов, как наиболее близких по совокупности существенных признаков аналога, позволил выявить совокупность существенных по отношению к сформулированному техническому результату признаков в заявленных способе и системе управления, которые изложены в формуле изобретения. Поэтому заявленные изобретения соответствуют критерию «новизна».
Для проверки соответствия заявленных изобретений критерию «изобретательский уровень» проведен поиск и анализ известных технических решений с целью выявления признаков, совпадающих с признаками предлагаемых способа поражения и системы управления СНО. Результаты поиска показали, что заявленные изобретения не вытекают явным образом из известного уровня техники, определенного заявителем. Заявленными изобретениями не предусматриваются следующие преобразования:
дополнение известного средства каким-либо известным блоком, присоединяемым к нему по известным правилам, для достижения технического результата;
замена какой-либо части известного средства другой известной частью для достижения технического результата;
увеличение однотипных элементов для достижения сформулированного технического результата;
создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлен по известным правилам, а достигнутый при этом технический результат обусловлен только известными свойствами частей этого средства и связями между ними.
Следовательно, заявленные изобретения соответствуют критерию «изобретательский уровень».
Предлагаемое техническое решение соответствует критерию «промышленная применимость», так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого технического решения могут быть использованы известные материалы и оборудование.
Способ поражения САП самонаводящимся по радиоизлучению оружием по п.1. реализуется следующим образом.
Пуск самонаводящегося по радиоизлучению оружия производят при отсутствии излучения станции активных помех бортовым РЛС, на первом этапе его полет происходит по программе с использованием данных инерциальной навигационной системы, на определенном рубеже, заданном перед пуском с носителя через блок связи с носителем, производят включение пассивной радиотехнической головки самонаведения в режим поиска сигналов станции активных помех по несущей частоте, длительности, периоду повторения импульсов и угловым координатам, а также включение имитатора передатчика бортовой РЛС, сигналы которого имеют параметры аналогичные параметрам сигналов бокового излучения типовых бортовых РЛС самолетов и излучаются через собственный излучатель, смонтированный на антенной системе пассивной радиотехнической головки самонаведения, провоцируя включение станции активных помех противника в режим подавления бортовой РЛС, причем во время излучения этих сигналов производят бланкирование (запирание) приемника пассивной радиотехнической головки самонаведения, а в паузах между сигналами имитатора передатчика бортовой РЛС осуществляют поиск, обнаружение и измерение параметров ответных сигналов станции активных помех пассивной радиотехнической головкой самонаведения, в блоке управления производят сравнение параметров сигналов принятых пассивной радиотехнической головкой самонаведения и излученных имитатором бортовой РЛС и при их совпадении по несущей частоте, длительности и периоду повторения импульсов формируют команды разрешения на захват цели пассивной радиотехнической головкой самонаведения, на переключение наведения самонаводящегося по радиоизлучению оружия с программного на самонаведение по сигналам пассивной радиотехнической головкой самонаведения и на изменение коэффициентов передачи автопилота, после этого, на втором этапе, полет самонаводящегося по радиоизлучению оружия производят под управлением пассивной радиотехнической головкой самонаведения вплоть до поражения станции активных помех, причем начальные установки для инерциальной навигационной системы и данные целеуказания для пассивной радиотехнической головки самонаведения и имитатора передатчика бортовой РЛС вводятся с самолета -носителя в блок связи с носителем самонаводящегося по радиоизлучению оружия перед пуском.
Система, реализующая способ поражения САП по п.1., работает следующим образом.
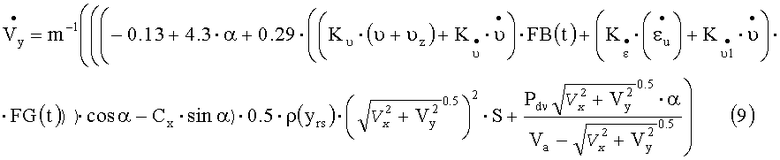
Перед пуском СНО в блок связи с носителем 4 по входу 2 вводятся: начальные установки для ИНС и расчетная траектория полета СНО до рубежа включения «канала провоцирования САП» (включения на излучение ИПБРЛС); данные целеуказания для ПРГС 3 (радиотехнические параметры цели (САП), сектор поиска цели) и рубеж включения ПРГС в режим поиска цели; радиотехнические параметры сигналов (несущая частота, длительность τи и период повторения импульсов Ти), подлежащих излучению ИПБРЛС и рубеж начала их излучения. При этом значения параметров τи и Ти выбираются аналогичными параметрам сигналов самолетных БРЛС. Расчеты, проведенные по известным формулам радиолокации применительно к характеристикам гипотетических РЛС (τи=0.25-1 мкс, Ти=700-1200 Гц, Рпер=45-100 кВт, уровень бокового излучения - 30 дБ) [Васин В.В., Степанов Б.М. Задачник по радиолокации. - М.: Сов. радио, 1969, с.109-110], показывают, что импульсная мощность ИПБРЛС, необходимая для имитации уровня сигнала бокового излучения БРЛС в точке расположения САП получается на два порядка меньше, чем у БРЛС (200-500 Вт), а непрерывная - порядка 0.5 Вт. После завершения передачи с носителя в СНО этих исходных данных с выхода 5 БСН в носитель передаются сигналы, подтверждающие прием начальных установок и данных целеуказания для ПРГС 3 и ИПБРЛС 2. После пуска СНО оно осуществляет полет по программной траектории, параметры которой корректируются ИНС 6. При этом параметры расчетной траектории, хранящиеся в БУ 7 (требуемые значения координат x, y, z СНО) сравниваются с текущими параметрами СНО, измеряемыми ИНС 6 и на ее выходе формируются сигналы коррекции, которые через коммутатор 8 (в исходном состоянии выход ИНС 6 подключен к автопилоту 9) поступают в автопилот 9, где формируются сигналы управления, поступающие на РП 10, которые изменяют положение AP 11 СНО, и приводят к его возврату на расчетную (требуемую) траекторию полета. В процессе полета текущие параметры полета СНО с выхода ИНС 6 поступают на вход БУ 7, где сравниваются с параметрами рубежей включения ИПБРЛС 2 и ПРГС 3. При достижении СНО рубежей включения ИПБРЛС 2 и ПРГС 3 из БУ 7 в ИПБРЛС 2 и ПРГС 3 выдаются команды на включение ИПБРЛС в режим излучения сигналов, имитирующих излучение самолетной БРЛС, и на включение ПРГС 3 и переход ее в режим поиска САП-цели, заданной целеуказанием, поступающим из БУ 7 вместе с этой командой. Сигналы ИПБРЛС 2 излучаются через собственный излучатель, смонтированный на АС 1 пассивной радиотехнической головки самонаведения, провоцируя включение САП противника в режим подавления бортовой РЛС, причем во время излучения этих сигналов с выхода 3 ИПБРЛС 2 на вход 3 ПРГС 3 поступают сигналы, бланкирующие (запирающие) приемник ПРГС, а в паузах между сигналами ИПБРЛС 2 осуществляются поиск, обнаружение и измерение параметров ответных сигналов САП пассивной радиотехнической головкой самонаведения 3, кроме того информация о параметрах излученных сигналов поступает с первого выхода ИПБРЛС 2 на четвертый вход БУ 7. После обнаружения заданной цели ПРГС 3 выдает соответствующий сигнал в БУ 7, где производится сравнение параметров сигналов принятых ПРГС 3 и излученных ИПБРЛС 2 и при их совпадении по несущей частоте, длительности и периоду повторения импульсов формируется команда разрешения захвата цели ПРГС. После получения из БУ 7 команды на захват и сопровождение САП-цели ПРГС 3 переходит в режим сопровождения этой цели и выдает в БУ 7 сигнал, подтверждающий выполнение команды. После этого БУ 7 выдает команду на третий вход коммутатора 8 на его переключение в режим «самонаведение», а также команду на автопилот 9 на изменение его коэффициентов передачи, соответствующих режиму полета по программной траектории, на коэффициенты, соответствующие режиму самонаведения на САП-цель. После поступления этой команды сигнал угловой скорости линии визирования СНО-САП с выхода ПРГС 3 поступает на вход БФКН 5, а выход ИНС 6 отключается от входа АП 9. В БФКН 5 формируется команда, соответствующая методу пропорционального наведения СНО, имеющая вид [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964, с.60]

где N1, 
и эта команда передается в автопилот 9, где она сравнивается с нормальным ускорением СНО, измеряемым в автопилоте 9, по результатам сравнения формируется сигнал рассогласования, в соответствии с которым на выходе автопилота 9 создается сигнал управления, поступающий на РП 10, которые изменяют положение аэродинамических рулей 11. Перемещение АР 11 приводит к изменению траектории полета СНО таким образом, что оно переходит на траекторию полета, соответствующую методу пропорционального наведения и такой режим сохраняется до момента встречи СНО с САП, т.е. до момента подрыва БЧ неконтактным или контактным взрывателями.
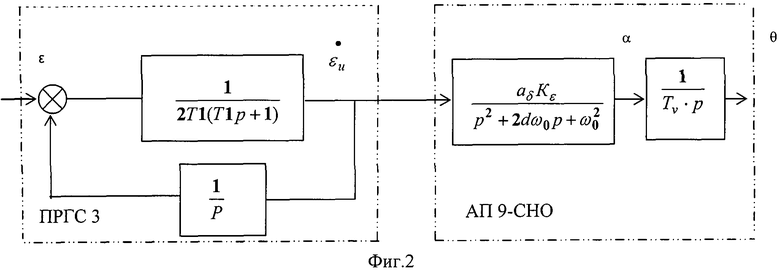
Для исследования точностных характеристик СНО, оснащенного предлагаемой системой управления, на основе структурной динамической схемы (фиг.2) с использованием методов теории радиоуправления и случайных процессов была разработана статистическая имитационная модель процесса самонаведения СНО на наземную станцию активных помех самолетным БРЛС.
Модель описывает динамику полета и самонаведения СНО с системой наведения, приведенной на фиг.1, и представляется следующей системой дифференциальных уравнений:

























где ε, 
ξбш, σn - белый шум с нулевым математическим ожиданием и спектральной плотностью R0, среднеквадратическое значение ошибки пеленгования ПРГС соответственно;
ξε, 
σB, τB - среднеквадратическое значение и время корреляции порывов ветра соответственно;
θB - флуктуационная составляющая угла, характеризующего направление вектора скорости θ УО, обусловленная ветровыми возмущениями;
Θ - допустимые значения угловой скорости изменения угла атаки СНО, определяемые допустимыми нормальными ускорениями;
Tν, ω0, d - постоянная времени, собственная частота колебаний СНО и коэффициент демпфирования автопилота соответственно;
Ti, Ki - постоянные времени i-x элементов контура (фильтров, ПРГС) и их коэффициенты усиления (передачи по скорости) соответственно;
Cx, Pdv, Va - аэродинамический коэффициент, тяга двигателя и скорость на активном участке траектории полета СНО соответственно;
Kυ, 

α, S, G, m - угол атаки, площадь крыла, вес и масса СНО соответственно;
ρ(yrs) - плотность воздуха на соответствующей высоте полета СНО;
Vx, Vy, Д, xrs, yrs, xcyc - проекции скорости полета СНО на оси x, y, наклонная дальность до цели и координаты (x,y) СНО и цели соответственно;
Ф, FB(t), FG(t), ТР1, Δ, FS(T) - функция Хевисайда, временные логические (переключательные) функции, задающие различную продолжительность работы ИНС и ПРГС, момент перехода СНО на самонаведение, время задержки подключения автопилота к ПРГС и последовательность импульсов, стробирующих ПРГС в моменты излучения сигналов ИПБРЛС соответственно;
n, Ts, t2, t3 - число стробирующих ПРГС импульсов, период их следования, момент начала и окончания импульса соответственно.
С использованием данной математической модели была оценена точность самонаведения СНО, имеющего характеристики, близкие к характеристикам самонаводящегося по радиоизлучению БЛА типа LARK [Капустин А. Южноафриканский беспилотный летательный аппарат LARK. Зарубежное военное обозрение 1995, №8], оснащенного системой управления, выполненной по приведенной на фиг.1 схеме, на наземную САП. Считалось, что БЛА оснащен боевой частью, имеющей радиус поражения 15 м. При этом точностные характеристики БЛА оценивались по показателю - среднеквадратическое отклонение (СКО) промаха (σ) в вертикальной плоскости.
Моделировался последний участок траектории полета БЛА на дальности (наклонной) 5 км от цели. Считалось, что на БЛА воздействуют порывы ветра, характеризующиеся спектральной плотностью мощности флуктуации скорости
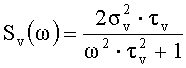
где σv - среднеквадратическое значение скорости порывов ветра; τv - время корреляции порывов ветра. При моделировании принималось, что для СНО σv=1-2 м/с, τv=1 с.
Кроме того, численные значения для элементов, приведенных в математической модели: ω0, aδ, d, Kг, Тг, T2, T3, T4, σp, Θ принимались равными типовым значениям для управляемых ракет (БЛА) [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964].
Результаты моделирования приведены в таблице, где представлены значения промаха БЛА в зависимости от ошибок пеленгования ПРГС и соответствующие вероятности поражения САП одним БЛА, оснащенным предложенной системой. Кроме того, в таблице приведены вероятности поражения САП прототипом для случаев применения САП мер защиты от поражения (ДИИ) и без них.
Анализ полученных результатов показывает, что предлагаемое техническое решение повышает точность наведения самонаводящегося по радиоизлучению оружия (БЛА) на наземные САП в 3-10 раз по сравнению с прототипом, увеличивает вероятность поражения РЭС-цели - в 4-8 раз, а требуемый наряд СНО для поражения САП с вероятностью не менее 0.8 снижает в 6-13 раз.
Изложенные сведения свидетельствуют о возможности выполнения при реализации заявленных способа поражения САП и системы, его реализующей, следующей совокупности условий:
предлагаемые способ поражения САП и система для его осуществления при их реализации позволят обеспечить эффективное применение СНО по излучающим САП противника;
показана возможность реализации на практике заявленных способа поражения и системы для его осуществления в том виде, как они охарактеризованы в формуле изобретения, с помощью описанных в заявке или известных до даты приоритета средств и методов;
предлагаемые способ поражения САП и система, его реализующая, при их разработке способны обеспечить достижение усматриваемого заявителем технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ ПРОТИВНИКА | 2011 |
|
RU2488769C2 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2013 |
|
RU2527609C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ И ВЕЛИЧИНЫ СКАЧКОВ ПЕЛЕНГА НА БОРТУ САМОНАВОДЯЩЕГОСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЯ | 2012 |
|
RU2516206C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 2003 |
|
RU2261457C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 2006 |
|
RU2307374C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ФАКТА НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЯ НА РАДИОЭЛЕКТРОННОЕ СРЕДСТВО, ЗАЩИЩЕННОЕ ОТВЛЕКАЮЩИМ УСТРОЙСТВОМ | 2012 |
|
RU2510481C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2581704C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ЗЕНИТНЫМИ УПРАВЛЯЕМЫМИ РАКЕТАМИ | 2015 |
|
RU2603025C1 |
Использование: относится к области управляемого оружия и может быть использовано в способе поражения наземных станций активных помех бортовым радиолокационным станциям самолетов самонаводящимся по радиоизлучению оружием и система для его осуществления. Сущность: пуск самонаводящегося по радиоизлучению оружия производят при отсутствии излучения станции активных помех бортовым РЛС, на первом этапе его полет происходит по программе с использованием данных инерциальной навигационной системы, на определенном рубеже производят включение пассивной радиотехнической головки самонаведения в режим поиска сигналов станции активных помех по несущей частоте, длительности, периоду повторения импульсов и угловым координатам. Провоцируют включение станции активных помех противника в режим подавления бортовой РЛС, производят бланкирование (запирание) приемника пассивной радиотехнической головки самонаведения, в паузах между сигналами имитатора осуществляют поиск, обнаружение и измерение параметров ответных сигналов станции активных помех пассивной радиотехнической головкой самонаведения. Сравнивают параметры сигналов и формируют команды разрешения на захват цели пассивной радиотехнической головкой самонаведения. На втором этапе, полет самонаводящегося по радиоизлучению оружия производят под управлением пассивной радиотехнической головкой самонаведения вплоть до поражения станции активных помех. Система для осуществления способа поражения наземных станций активных помех бортовым РЛС самонаводящимся по радиоизлучению оружием. Технический результат: обеспечение поражения наземных САП самонаводящимся по радиоизлучению оружием без снижения скрытности и боевых возможностей ударной группы повышает точность наведения самонаводящегося по радиоизлучению оружия на наземные САП в 3-10 раз, увеличивает вероятность поражения РЭС-цели в 4-8 раз, а требуемый наряд СНО для поражения САП с вероятностью не менее 0.8 снижает в 6-13 раз. 2 н.п. ф-лы, 2 ил., 1 табл.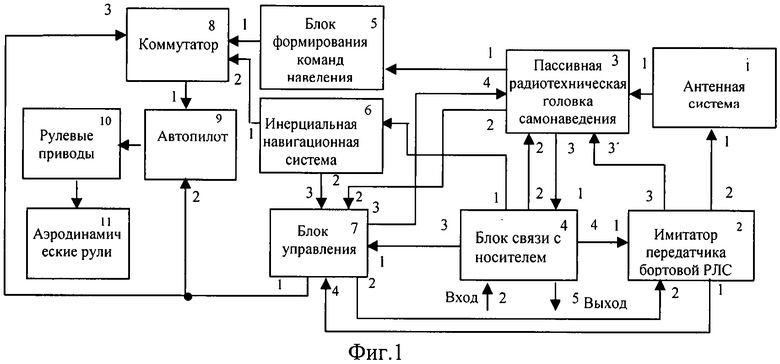
1. Способ поражения наземных станций активных помех бортовым радиолокационным станциям (РЛС) самолетов самонаводящимся по радиоизлучению оружием, включающий прием сигналов станций активных помех антенной системой самонаводящегося по радиоизлучению оружия, находящегося на подвеске под носителем, захват сигналов станций активных помех на сопровождение пассивной радиотехнической головкой самонаведения самонаводящегося по радиоизлучению оружия, определение пассивной радиотехнической головкой самонаведения угловой скорости линии визирования станции активных помех, пуск самонаводящегося по радиоизлучению оружия и полет к цели по командам, формируемым по информации от пассивной радиотехнической головки самонаведения и преобразуемых в автопилоте в сигналы управления рулевыми приводами самонаводящегося по радиоизлучению оружия, изменяющими положение аэродинамических рулей, приводящих к изменению его траектории полета к цели (станции активных помех) в соответствии с используемым законом самонаведения, отличающийся тем, что пуск самонаводящегося по радиоизлучению оружия производят при отсутствии излучения станции активных помех бортовым РЛС, на первом этапе его полет происходит по программе с использованием данных инерциальной навигационной системы, на определенном рубеже, заданном перед пуском с носителя через блок связи с носителем, производят включение пассивной радиотехнической головки самонаведения в режим поиска сигналов станции активных помех по несущей частоте, длительности, периоду повторения импульсов и угловым координатам, а также включение имитатора передатчика бортовой РЛС, сигналы которого имеют параметры аналогичные параметрам сигналов бокового излучения типовых бортовых РЛС самолетов и излучаются через собственный излучатель, смонтированный на антенной системе пассивной радиотехнической головки самонаведения, провоцируя включение станции активных помех противника в режим подавления бортовой РЛС, причем во время излучения этих сигналов производят бланкирование (запирание) приемника пассивной радиотехнической головки самонаведения, а в паузах между сигналами имитатора передатчика бортовой РЛС осуществляют поиск, обнаружение и измерение параметров ответных сигналов станции активных помех пассивной радиотехнической головкой самонаведения, в блоке управления производят сравнение параметров сигналов, принятых пассивной радиотехнической головкой самонаведения и излученных имитатором бортовой РЛС, и при их совпадении по несущей частоте, длительности и периоду повторения импульсов формируют команды разрешения на захват цели пассивной радиотехнической головкой самонаведения, на переключение наведения самонаводящегося по радиоизлучению оружия с программного на самонаведение по сигналам пассивной радиотехнической головкой самонаведения и на изменение коэффициентов передачи автопилота, после этого на втором этапе полет самонаводящегося по радиоизлучению оружия производят под управлением пассивной радиотехнической головкой самонаведения вплоть до поражения станции активных помех, причем начальные установки для инерциальной навигационной системы и данные целеуказания для пассивной радиотехнической головки самонаведения и имитатора передатчика бортовой РЛС вводятся с носителя в блок связи с носителем самонаводящегося по радиоизлучению оружия перед пуском.
2. Система для осуществления способа поражения наземных станций активных помех бортовым РЛС самонаводящимся по радиоизлучению оружием, содержащая антенную систему (АС), пассивную радиотехническую головку самонаведения (ПРГС), блок формирования команд наведения (БФКН) и последовательно соединенные автопилот (АП), рулевые приводы (РП), работающие на газе турбогенераторного источника питания, и аэродинамические рули (АР), отличающаяся тем, что в нее введены имитатор передатчика бортовой РЛС (ИПБРЛС), блок связи с аппаратурой носителя (БСН), инерциальная навигационная система (ИНС), блок управления БУ, коммутатор (К), причем управляющие входы 3 и 2 коммутатора К и автопилота соответственно соединены с первым выходом БУ, первый вход которого соединен с третьим выходом БСН, второй вход - со вторым выходом ПРГС, а третий вход - с вторым выходом ИНС, первый выход которой подключен ко второму входу коммутатора К, первый выход которого соединен с входом АП, причем первый выход ПРГС соединен с входом БФКН, выход которого соединен с первым входом коммутатора, третий выход ПРГС соединен в первым входом БСН, а четвертый вход соединен с третьим выходом БУ, второй выход которого соединен со вторым входом ИПБРЛС, первый выход которого соединен с четвертым входом БУ, второй выход соединен первым входом АС, третий выход подключен к третьему входу ПРГС, а первый вход соединен с четвертым выходом БСН, первый выход которого соединен с входом ИНС, а второй выход - с вторым входом ПРГС, первый вход которой соединен с выходом АС, причем второй вход БСН является входом, а пятый его выход - выходом системы.
| АВИАЦИОННЫЙ ИНТЕГРИРОВАННЫЙ МНОГОКАНАЛЬНЫЙ, МНОГОРЕЖИМНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2004 |
|
RU2266235C1 |
| КОРРЕКТИРУЕМАЯ, САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 1999 |
|
RU2156954C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| US 2010282893 A1, 11.11.2010 | |||
| US 2010326264 A1, 20.12.2010. | |||

