Изобретение относится к современным средствам управления самонаводящимся по радиоизлучению оружием (СНО) и их бортовой радиоэлектронной аппаратуре и предназначается в основном для формирования в бортовой аппаратуре СНО сигналов, информирующих о скачкообразном изменении пеленговой информации об угловом положении источников радиоизлучения (ИРИ) в процессе самонаведения СНО, а также о направлении (знаке) и величине таких скачкообразных изменений.
Самонаводящееся по радиоизлучению оружие (управляемые авиационные ракеты, беспилотные летательные аппараты и др.) играет важную роль при огневом поражении важных ИРИ в ходе ведения боевых действий и является наиболее эффективным средством их уничтожения. Поэтому для снижения вероятности поражения ИРИ применяются различные меры их защиты от поражения СНО. Одними из наиболее распространенных мер защиты являются использование отвлекающего устройства (ОУ) маскирующего типа, осуществляющего всеракурсное прикрытие защищаемого ИРИ по боковому излучению его передатчика и дискретная работа нескольких однотипных ИРИ на излучение. В первом случае, соотношение мощностей сигналов, излучаемых ИРИ и ОУ, как правило, выбирается таким, чтобы обеспечивалось гарантированное перенацеливание СНО на ОУ [Волжин Ф.Р., Сизов Ю.Г. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1983. - 144 с., ил., стр.117] и создать такое возмущение в системе управления СНО (скачок пеленга) при котором СНО не успевает его отработать к концу полета. Во втором случае несколько пространственно разнесенных ИРИ, имеющих одинаковые радиотехнические параметры излучения, попеременно и кратковременно работают на излучение. Обе меры защиты рассчитаны на создании в системе управления СНО возмущений (скачков пеленгов), направленных на увеличение промахов СНО относительно защищаемых ИРИ путем однократного перенацеливания на ОУ или многократного - на дискретно, работающие ИРИ.
Поэтому своевременное выявление и определение на борту СНО возмущений типа «скачок пеленга», их направления и величины, является одной из важных задач бортовой аппаратуры в системах автоматического управления любых типов ВТО. Без решения этой задачи невозможна организация в системе управления СНО противодействия рассматриваемым мерам защиты ПРИ от поражения.
Решить задачу определения направления и величины скачков пеленга на борту можно на основе применения элементов как аналоговой, так и цифровой техники, а также и при их совместном использовании. В настоящее время наиболее часто в бортовой аппаратуре СНО применяются микросхемы (аналоговые и цифровые).
Известно устройство определения направления и величины скачков пеленга на борту СНО, построенное на основе определения знака и величины углового возмущения (скачка пеленга) на выходе приемно-пеленгационного устройства головки самонаведения (ГСН) СНО, возникающего в результате селекции одного из ИРИ в составе групповой цели (ИРИ или ОУ) на дальности углового разрешения (Др) парной цели. Др - это такая дальность от СНО до парной цели, начиная с которой расстояние между ИРИ и ОУ, называемое базой В, становится больше линейного размера ширины диаграммы направленности антенны (ДНА) ГСН СНО по уровню половинной мощности и в ДНА остается только одно средство (ИРИ или ОУ). Такое устройство определения направления и величины скачков пеленга содержит последовательно соединенные антенну (А), приемно-пеленгационное устройство (ПНУ) и устройство управления (УУ) [Палий А.И. Радиоэлектронная борьба: (Средства и способы подавления и защиты радиоэлектронных систем). - М.: Воениздат, 1981. - 320 с., ил, стр.132] и применяется в СНО типа «Shrike». При этом ППУ представляет собой узкополосное приемное устройство, настраиваемое на фиксированную частоту, соответствующую частоте ИРИ, подлежащего поражению, антенна - многоэлементную спиральную антенну, а УУ - процессор, управляющий работой ППУ и устройства определения направления и величины скачков пеленга на борту СНО [Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем / Под ред. А.И. Куприянова. - М.: Вузовская книга, 2007. - 468 с.: ил., стр.430, 444, 447]. На большой дальности от СНО до ИРИ, защищенного ОУ, в ДНА антенны СНО попадают одновременно ИРИ и ОУ, поэтому ППУ определяет угловое направление (пеленг) на эффективный центр излучения парной цели, лежащий при одинаковых излучаемых мощностях ИРИ и ОУ на середине базы В [Волжин Ф.Р., Сизов Ю.Г. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1983. - 144 с., ил., стр.119-121]. При достижении СНО дальности углового разрешения ИРИ и ОУ на выходе ППУ формируется угловое возмущение (скачок пеленга), возникающее в результате селекции одной из целей (ИРИ или ОУ). Этот скачок поступает в УУ и свидетельствует о том, что ранее (до углового разрешения целей) СНО наводилось на парную цель, например, состоящую из ПРИ и ОУ. Знак напряжения скачка пеленга говорит о направлении на захваченную цель относительно продольной оси антенны СНО, а его величина о значении угла разрешения (о величине угла между центром эффективного излучения групповой цели и направлением на захваченную цель (ИРИ или ОУ). Это напряжение подается далее в автопилот для формирования команд управления рулевыми приводами СНО, которые отклоняются в соответствующую сторону и на такую величину, чтобы СНО к концу полета смогло отработать промах, обусловленный этими скачками. Таким образом, информация о параметрах скачков пеленга циркулирует внутри замкнутой угловой следящей системы СНО и для решения задач распознавания мер защиты и противодействия им на борту СНО не используется.
Основными недостатками такого устройства определения направления и величины скачков пеленга на борту СНО являются:
необходимость точного знания частоты излучения ИРИ - цели, так как в нем не предусмотрена перестройка частоты при нахождении СНО на самолете-носителе в процессе полета, поэтому устройство может применяться только при действии по цели, работающей в определенном диапазоне частот;
информация о параметрах скачков пеленга циркулирует внутри замкнутой угловой следящей системы СНО и для решения задач распознавания мер защиты и противодействия им на борту СНО не предназначена и не используется;
направление и величина скачков пеленга на борту СНО, определяется только в момент разрешения парной цели, но сигналы, фиксирующие этот момент, для системы управления СНО не формируются и поэтому отсутствуют соответствующие сигналы на включение устройств идентификации источников излучения и перенацеливания СНО на ИРИ - цель.
Известно также устройство определения направления и величины скачков пеленга на борту СНО, обеспечивающее возможность определения параметров углового возмущения (направления и величины скачка пеленга) на выходе приемно-пеленгационного устройства на дальности разрешения парной цели, состоящей из ИРИ и ОУ, построенное на принципах широкополосного супергетеродинного приема, содержащее последовательно соединенные антенну А, приемно-пеленгационное устройство ЦПУ, устройство управления УУ и применяемое в СНО типа «HARM». При этом ЦПУ представляет собой широкополосное приемное устройство с преобразованием частоты, перестраиваемое по частоте в диапазоне РЭС - целей, подлежащих поражению, антенна - многоэлементную спиральную антенну, а УУ - процессор, управляющий работой ППУ и устройства определения направления и величины скачков пеленга на борту СНО [Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем / Под ред. А.И. Куприянова. - М.: Вузовская книга, 2007. - 468 с.: ил., стр.430, 445, 446]. На больших дальностях до ИРИ, защищенного ОУ, в диаграмме направленности антенны (ДНА) СНО находятся одновременно ИРИ и ОУ, и ППУ определяет угловое направление на эффективный центр излучения парной цели. При достижении СНО дальности углового разрешения парной цели на выходе ППУ создается угловое возмущение (скачок пеленга), возникающее в результате селекции одной из целей (ПРИ или ОУ). Это возмущение может быть зафиксировано в УУ и свидетельствовать о факте наведения СНО на парную цель, например, состоящую из ПРИ и ОУ. В дальнейшем СНО наводится на цель, попавшую в ДНА после разрешения, а информация о скачке пеленга на борту используется только в внутри контура углового сопровождения цели для отработки углового рассогласования и в автопилоте для формирования команд управления рулевыми приводами СНО, которые отклоняются в соответствующую сторону и на такую величину, чтобы СНО к концу полета смогло отработать промах, обусловленный этими скачками. Информация о параметрах скачков пеленга вне устройства углового сопровождения не используется и поэтому меры по идентификации цели и противодействию мерам защиты ИРИ от поражения не предпринимаются.
Основным недостатком такого устройства определения направления и величины скачков пеленга на борту СНО является то, что сигналы, характеризующие параметры скачков пеленгов (их знак и величину) циркулируют только внутри контура углового сопровождения СНО и не могут быть использованы для принятия мер по идентификации источников излучения, перенацеливанию СНО на ИРИ - цель, а сам скачок пеленга на борту СНО возникает только на дальности разрешения парной цели, то есть слишком поздно, и поэтому действия системы управления СНО направлены только на устранение угловых возмущений, возникших в момент разрешения.
Наиболее близким, по технической сущности и достигаемому эффекту, является устройство определения направления и величины скачков пеленга на борту СНО, основанное на принципе широкополосного супергетеродинного приема, реализованного в СНО типа «HARM», [Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем / Под ред. А.И.Куприянова. - М.: Вузовская книга, 2007. - 468 с.: ил., стр.445-446], содержащее последовательно соединенные антенну А, приемно-пеленгационное устройство ППУ, устройство управления УУ. Выходные сигналы ППУ в определенные моменты времени несут информацию о типе радиоизлучающей цели (одиночная или групповая). При этом на дальности разрешения целей возникает угловое возмущение, свидетельствующее о перенацеливании СНО на одно из радиоизлучающих средств (ИРИ или ОУ). Таким образом, с использованием сигналов на выходе ППУ в контуре углового сопровождения СНО может быть сформирован сигнал, несущий информацию о направлении и величине скачков пеленга на борту СНО.
Однако недостатком этого устройства является то, что в нем сигналы, характеризующие параметры скачков пеленгов (их знак и величину) циркулируют только внутри контура углового сопровождения и не могут быть использованы вне этого контура для индикации угловых возмущений типа скачок пеленга и последующего принятия мер по идентификации источников излучения, перенацеливанию СНО на ИРИ - цель. Кроме того, сам скачок пеленга на борту СНО возникает слишком поздно, в момент разрешения парной цели, и поэтому действия системы управления СНО направлены только на устранение угловых возмущений, возникших в момент разрешения.
Для устранения этих недостатков требуется создание фактически нового технического устройства, позволяющего в момент разрешения целей формировать специальные сигналы, соответствующие направлениям и величине скачков пеленга на борту СНО, а значит, и определять момент начала действий бортовой системы управления по распознаванию ОУ и перенацеливанию СНО на заданный ИРИ.
Технической задачей настоящего изобретения является расширение области применения устройства за счет извлечения информации об угловых возмущениях из контура углового сопровождения СНО и формирования импульсов, характеризующих направления скачков пеленга на ИРИ или ОУ, а также напряжения, пропорционального величине этих скачков, для управления бортовыми средствами защиты СНО от мер противодействия ИРИ самонаводящемуся по радиоизлучению оружию.
Поставленная задача решается за счет того, что в известное устройство определения направления и величины скачков пеленга на борту СНО, содержащее последовательно соединенные антенну А, приемно-пеленгационное устройство ППУ, устройство управления УУ, дополнительно введены последовательно соединенные устройство задержки (УЗ), вход которого соединен со вторым выходом ППУ, вычитающее устройство (ВУ), второй вход которого подключен ко второму выходу ППУ, интегрирующее устройство (ИУ), первое пороговое устройство (ПУ), вход которого соединен с шестым входом УУ и входом второго ПУ, первый индикатор скачка пеленга (ИСП), а также последовательно соединенные второе ПУ и второй ИСП, при этом выходы первого и второго ИСП подключены соответственно к пятому и четвертому входам УУ, первый вход которого является входом устройства, второй выход-выходом устройства, а третий вход соединен с третьим выходом ППУ.
Формирование сигналов, содержащих информацию о направлении и величине скачков пеленга на борту СНО, производится с использованием ППУ, УЗ, ВУ и ИУ, на выходе которого создается положительный скачок напряжения, пропорциональный величине углового возмущения, если произошло перенацеливание СНО на ИРИ, расположенный справа от равносигнального направления (оси) антенны, или отрицательный скачок напряжения, если СНО перенацелилось на ИРИ, расположенный слева от оси антенны. Сигналы, индицирующие скачок пеленга влево в виде отрицательного импульса (напряжения низкого уровня) формируются с помощью первых ПУ и ИСП при поступлении на вход первого ПУ отрицательного перепада напряжения с выхода ИУ, а скачок пеленга вправо в виде положительного импульса (сигнала высокого уровня) - с использованием вторых ПУ и ИСП, при поступлении на вход второго ПУ положительного перепада напряжения с выхода ИУ.
Техническое решение обладает новыми свойствами:
- расширенной областью применения за счет извлечения информации об угловых возмущениях из контура углового сопровождения СНО и формирования импульсов, характеризующих направления скачков пеленга на ИРИ или ОУ, а также напряжения, пропорционального величине этих скачков для управления бортовыми средствами защиты СНО от мер противодействия ИРИ самонаводящемуся по радиоизлучению оружию;
- универсальностью, выражающейся в способности определять как направления, так и величину скачков пеленга на борту СНО в моменты разрешения групповой цели;
- повышенной вероятностью определения направления и величины скачков пеленга на борту СНО и формирования сигналов, соответствующих знакам этих скачков и значениям их величины.
При этом идентификация направления скачков пеленга (влево или вправо от оси антенны) позволяет использовать устройство не только в целях определения факта перенацеливания СНО на один из ИРИ, но и в интересах последующего включения бортовых средств распознавания ОУ и перенацеливания СНО на заданный ИРИ.
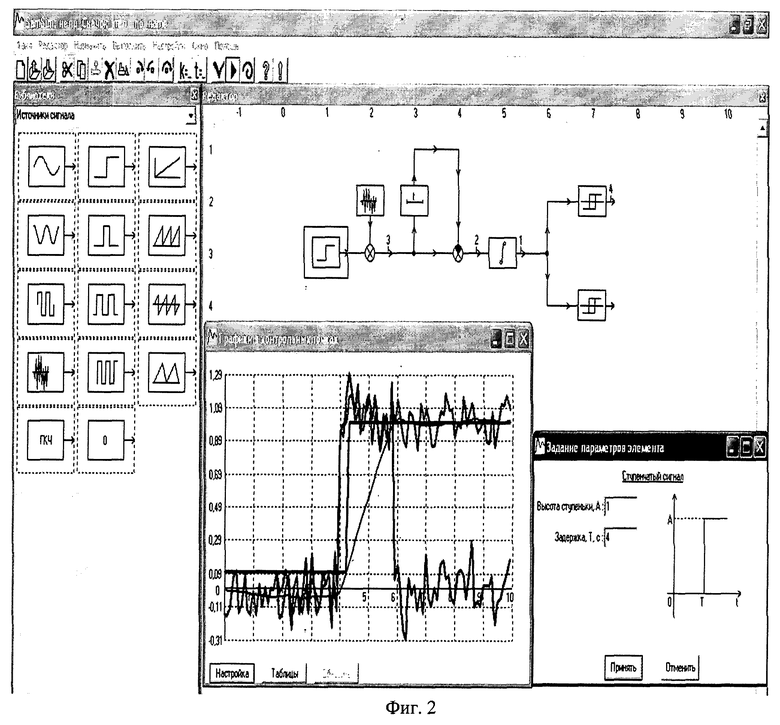
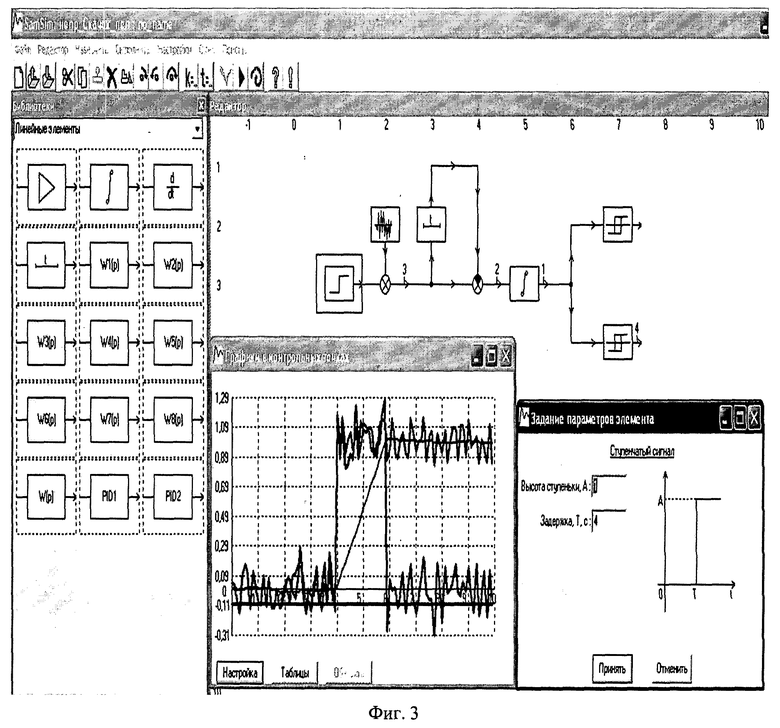
На фиг.1 представлена структурная схема устройства определения направления и величины скачков пеленга на борту СНО. На фиг.2 и фиг.3 приведена модель устройства, разработанная в среде пакета прикладных программ (ППП) SamSim, поясняющая порядок его функционирования при положительном скачке пеленга в момент разрешения целей. На фиг.2 обозначено:  - источник сигнала;
- источник сигнала;  - источник шума;
- источник шума;  - устройство задержки сигнала;
- устройство задержки сигнала;  - интегрирующее устройство;
- интегрирующее устройство;  - пороговое устройство;
- пороговое устройство;  - вычитающее устройство;
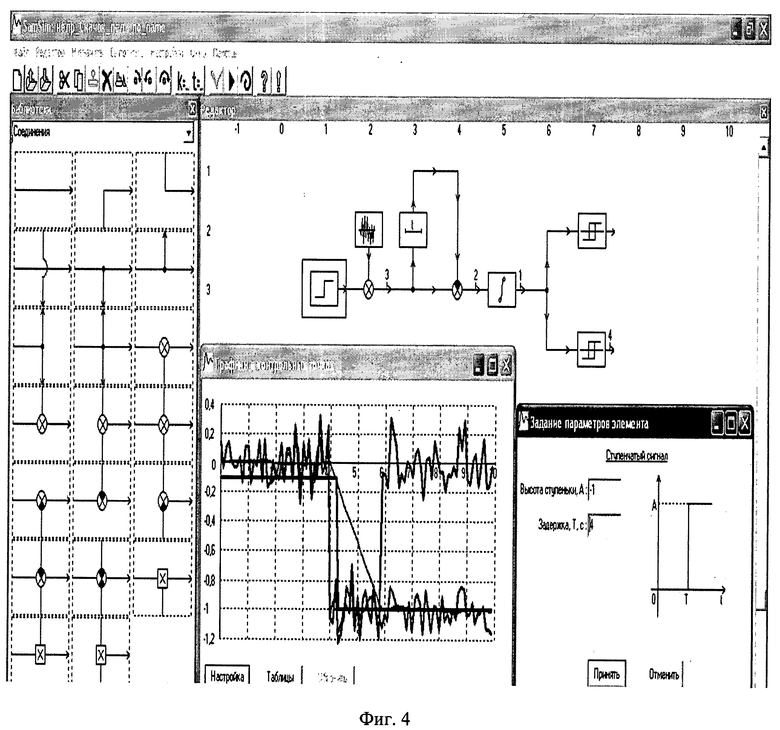
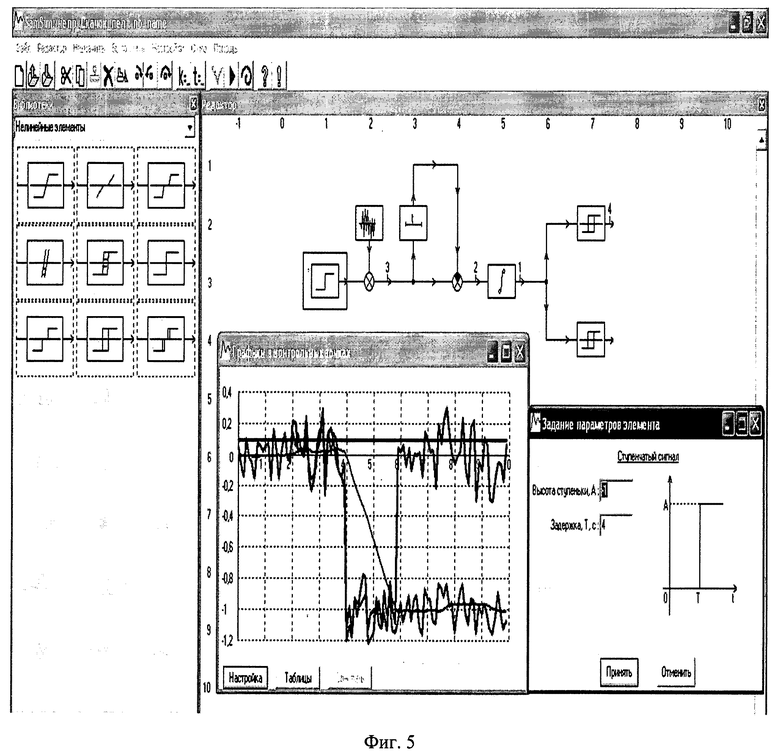
- вычитающее устройство;  - суммирующее устройство, введенное в модель условно для формирования сигнала ППУ с учетом шумовых флуктуации; 1, 2, 3, 4 - контрольные точки схемы, для которых приведены графические зависимости. На фиг.4 и фиг.5 приведена модель устройства определения, разработанная в среде пакета прикладных программ (ППП) SamSim, поясняющая порядок функционирования устройства при отрицательном скачке пеленга в момент разрешения целей.
- суммирующее устройство, введенное в модель условно для формирования сигнала ППУ с учетом шумовых флуктуации; 1, 2, 3, 4 - контрольные точки схемы, для которых приведены графические зависимости. На фиг.4 и фиг.5 приведена модель устройства определения, разработанная в среде пакета прикладных программ (ППП) SamSim, поясняющая порядок функционирования устройства при отрицательном скачке пеленга в момент разрешения целей.
Устройство определения направления и величины скачков пеленга на борту СНО (фиг.1) содержит антенну 1, приемно-пеленгационное устройство 2, устройство управления 3, устройство задержки 4, выполненное в виде дискретно-аналоговой линии задержки на интегральной схеме типа КР1016БР1 [Воробьев Е.П., Сенин К.В. Интегральные микросхемы производства СССР и их зарубежные аналоги: Справочник. - М.: Радио и связь, 1990. - 352 с.: ил, с.178], два индикатора скачка пеленга 5.1 и 5.2, выполненные в виде асинхронных RS триггеров на ИМС 155 серии [Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ, пособие, - 3-е изд. перераб. и доп. - М.: Радио и связь, 1989, 240 с.: ил. - (Массовая радиобиблиотека; вып.1143), с.117], вычитающее устройство 6, выполненное в виде типового сумматора на интегральной микросхеме (ИМС) прецизионного операционного усилителя (ОУ) КМ551УД1А [Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ, пособие. - 3-е изд. перераб. и доп. - М.: Радио и связь, 1989, 240 с.: ил. - (Массовая радиобиблиотека; вып.1143), с.50-53], два пороговых устройства 7.1 и 7.2, выполненные на ИМС К155ТЛ1 или К554СА2 по схеме триггера Шмитта или компаратора соответственно [Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ, пособие. - 3-е изд. перераб. и доп. - М.: Радио и связь, 1989, 240 с.: ил. - (Массовая радиобиблиотека; вып.1143), с.56-57, 122], интегрирующее устройство 8, выполненное по типовой схеме на ИМС ОУ КР140УД3, причем первый выход УУ 3 подключен к второму входу ПНУ 2, третий выход которого соединен с третьим входом УУ 3, пятый и четвертый входы которого подключены к выходам первого и второго ИСП 5.1, 5.2 соответственно, входы которых соединены с выходами первого и второго ПУ 7.1, 7.2 соответственно, входы которых, а также шестой вход УУ 3 подключены к выходу ИУ 8, вход которого соединен с выходом ВУ 6, первый и второй входы которого подключены к выходу УЗ 4 и второму выходу ППУ 2 соответственно, при этом вход УЗ 4 соединен с вторым выходом ППУ 2, причем первый вход УУ 3 является входом устройства, на который поступают данные целеуказания с носителя СНО, а второй выход УУ3 - выходом устройства, с которого снимаются сигналы управления.
Таким образом, заявленное устройство обеспечивает формирование сигналов, соответствующих направлениям и величине скачков пеленга на борту СНО в момент разрешения парной цели (ИРИ и ОУ), что позволяет определить не только направление перенацеливания СНО (влево или вправо от направления оси антенны в момент разрешения целей), но и момент включения бортовых средств распознавания ОУ и перенацеливания СНО на ИРИ.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам предлагаемого устройства определения направления и величины скачков пеленга на борту СНО. Выбор из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности существенных признаков аналога, позволил выявить совокупность существенных по отношению к сформулированному техническому результату признаков в заявленном устройстве определения, которые изложены в формуле изобретения. Поэтому заявленное изобретение соответствует критерию «новизна».
Для проверки соответствия заявленного изобретения критерию «изобретательский уровень» проведен поиск и анализ известных технических решений с целью выявления признаков, совпадающих с признаками предлагаемого устройства определения направления и величины скачков пеленга на борту СНО. Результаты поиска показали, что заявленное изобретение не вытекает явным образом из известного уровня техники, определенного заявителем. Заявленным изобретением не предусматриваются следующие преобразования:
дополнение известного средства каким-либо известным блоком, присоединяемым к нему по известным правилам, для достижения технического результата;
замена какой-либо части известного средства другой известной частью для достижения технического результата;
увеличение однотипных элементов для достижения сформулированного технического результата;
создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлен по известным правилам, а достигнутый при этом технический результат обусловлен только известными свойствами частей этого средства и связями между ними.
Следовательно, заявленное изобретение соответствует критерию «Изобретательский уровень».
Предлагаемое техническое решение соответствует критерию «промышленная применимость», так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого технического решения могут быть использованы известные материалы и оборудование.
Рассмотрим работу устройства определения направления и величины скачков пеленга на борту СНО. Перед пуском СНО с носителя на первый вход УУ 3 поступают данные целеуказания о радиотехнических параметрах ИРИ, подлежащего поражению, содержащие частотные и временные характеристики РЭС. После этого с выхода 1 УУ 3 на второй вход ППУ 2 поступает команда на его настройку на частоту ИРИ fr и другие параметры ИРИ соответственно. Сигналы, подтверждающие настройку ППУ 2 на заданную частоту, передаются с первого выхода ППУ 2 на второй вход УУ 3. После пуска СНО на первый вход ППУ 2 поступают сигналы, излучаемые ИРИ и ОУ, принятые антенной 1. На больших дальностях до ИРИ, защищенного ОУ, в приемной диаграмме направленности (ДНА) антенны 1 СНО находятся одновременно ИРИ и ОУ, и ППУ 2 определяет угловое направление на эффективный центр излучения парной цели, а также передает эти данные со своего третьего выхода на третий вход УУ 3. При этом для управления полетом СНО используется информация поступающая в автопилот со второго выхода УУ 3. При достижении СНО дальности, на которой линейное расстояние между ИРИ и ОУ становится больше линейных размеров ширины ДНА происходит переход на сопровождение одной из целей (ИРИ или ОУ в зависимости от соотношения мощностей, излучаемых их передатчиками) и на выходе ППУ 2 появляется угловое возмущение (скачок пеленга), соответствующее разности угловых направлений на эффективный центр излучения парной цели (ИРИ-ОУ) и на вновь захваченную цель. Эта дальность и является дальностью разрешения парной цели. Сигналы, характеризующие угловое положение сопровождаемой цели со второго выхода ППУ 2 подаются на вход УЗ 4 и на второй вход ВУ 6. При отсутствии скачков пеленга на выходе ВУ 6 сигналы имеют по абсолютной величине низкий уровень (см. фиг.2), а при их наличии на выходе ВУ 6 формируются положительные или отрицательные импульсы напряжения в зависимости от направления угловых возмущений (фиг.2-5). Эти импульсы далее поступают на вход ИУ 8, с выхода которого снимается напряжение, амплитуда которого пропорциональна величине скачка пеленга, а знак - направлению скачка пеленга (вправо или влево от направления на эффективный центр излучения парной цели), и подается на входы ПУ 7.1, 7.2 и на шестой вход УУ 3. Значения порогов срабатывания ПУ 7.1, 7.2 выбраны таким образом, что при поступлении на их входы положительного перепада напряжения с выхода ПУ 8 на выходе ПУ 7.1 формируется нулевой уровень напряжения, а на выходе ПУ 7.2 - высокий уровень. Графические зависимости, поясняющие эти процессы, показаны на фиг.2 и фиг.3. На этих фигурах выходной сигнал ППУ 2 условно представляется в виде суммы единичного положительного скачка напряжения и шумовой составляющей, характеризующей флуктуации сигнала углового канала ППУ 2. При поступлении с выхода ИУ 8 отрицательного перепада напряжения на входы ПУ 7.1 7.2 на их выходах устанавливаются отрицательный и нулевой уровень напряжения соответственно. Графические зависимости, поясняющие эти процессы, показаны на фиг.4 и фиг.5. На этих фигурах выходной сигнал ППУ 2 условно представляется в виде суммы единичного отрицательного скачка напряжения и шумовой составляющей, характеризующей флуктуации сигнала углового канала ППУ 2. Напряжения с выходов ПУ 7.1 и 7.2 подаются на входы ИСП 5.1 и 5.2 соответственно. Индикатор скачка пеленга 5.2, представляющий собой RS триггер, срабатывает при поступлении на его вход положительного перепада напряжения и формирует на своем выходе сигнал высокого уровня, соответствующий скачку пеленга вправо от направления на эффективный центр излучения групповой цели. Индикатор скачка пеленга 5.1 срабатывает при поступлении на его вход отрицательного перепада напряжения и формирует на своем выходе сигнал низкого уровня, соответствующий скачку пеленга влево от направления на эффективный центр излучения групповой цели. Выходные сигналы ИСП 5.1 и 5.2 поступают на пятый и четвертый входы УУ 3 соответственно и являются сигналами индикации скачков пеленга влево и вправо соответственно. В УУ 3 на основе поступивших сигналов с ИСП 5.1 и 5.2 формируется соответствующий сигнал и передается на выход устройства (в систему управления средствами защиты СНО).
Таким образом, с помощью предложенного устройства в системе управления СНО могут быть сформированы сигналы, характеризующие знак и величину скачка пеленга на ИРИ или ОУ в момент разрешения парной цели, и определяющие момент начала последующих действий, направленных на идентификацию элементов парной цели и перенацеливание СНО на заданную ИРИ - цель.
Для исследования возможностей и характеристик предлагаемого устройства определения направления и величины скачков пеленга на борту СНО с использованием структуры, приведенной на фиг.1 было проведено математическое имитационное статистическое моделирование процесса его функционирования в среде пакета прикладных программ (ППП) Mathcad. При этом были оценены вероятности и дальности обнаружения сигналов излучений ИРИ, дальности разрешения групповой цели, состоящей из ИРИ и ОУ, и вероятности формирования сигналов, соответствующих направлениям и величине скачков пеленга с использованием предлагаемого устройств. При имитационном моделировании использовались следующие исходные данные.
Ширина ДНА 2θ0.5 (широкодиапазонной спиральной) для приема сигналов ППУ вычислялась по известной формуле:
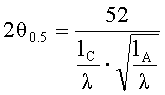 ,
,
где lC, lA, λ - длина витка спирали, длина антенны по оси излучения и длина волны принимаемого антенной излучения ИРИ, соответственно [Белоцерковский Г.Б. Основы радиотехники и антенны. В 2-х ч. Ч.II. Антенны: м Учебник для техникумов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1983. - 296 с., ил. с.143-145].
Коэффициент усиления антенн СНО и ИРИ G определялся по известной формуле:
 ,
,
где Sг, da, ηа, γa - геометрическая площадь, диаметр антенны, коэффициенты полезного действия и использования антенны соответственно [Белоцерковский Г.Б. Основы радиотехники и антенны. В 2-х ч. Ч.II. Антенны: Учебник для техникумов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1983. - 296 с., ил., с.20-21].
Уровни бокового излучения ИРИ принимались в соответствии с [Князев А.Д., Пчелкин В.Ф. Проблемы обеспечения совместной работы радиоэлектронной аппаратуры. Выпуск 6. - М.: Сов. радио, 1971, стр.60-64].
Дальности и вероятности обнаружения излучений ИРИ вычислялись по известным формулам [Палий А.И. Радиоэлектронная борьба: (Средства и способы подавления и защиты радиоэлектронных систем). - М.: Воениздат, 1981. - 320 с., ил., с.130, Добыкин В.Д., Куприянов А.И, Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем / Под ред. А.И. Куприянова. - М.: Вузовская книга, 2007. - 468 с.: ил., стр.444-448] с учетом, как внутренних шумов приемников, так и типовой фоновой шумовой обстановки.
Дальности разрешения парной цели (ИРИ и ОУ) Lp определялись с использованием следующего известного выражения:
 ,
,
где ε, β, B, ρ - углы подлета СНО в вертикальной и горизонтальной плоскости относительно середины расстояния между ИРИ и ОУ, расстояние (база) между ПРИ и ОУ и отношение мощностей ОУ и ИРИ соответственно [Волжин Ф.Р., Сизов Ю.Г. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1983. - 144 с., ил., стр.117-122].
При статистическом моделировании расчеты проводились по 100 реализациям с учетом влияния таких случайных факторов как нестабильность мощности, излучаемой передатчиками, уровней основного и бокового ИРИ и ОУ. При этом нестабильности указанных параметров представлялись случайными процессами, имеющими нормальное распределение с нулевыми значениями математического ожидания и соответствующими СКО.
При моделировании были приняты следующие гипотетические исходные данные: Высота полета СНО - 5000 м., длина волны ИРИ-цели (импульсной РЛС) - 0.03 м., мощность 250*103 вт., уровень бокового излучения РЭС - минус 40 дБ, база ИРИ-ОУ - 500 м., ρ=1, ε=30°, β=90°, ηа=0.8. γа=0.6, da=0.2 м для антенны СНО и 5.3 м для РЛС, lc=1.3λ, lA=2.5λ (что соответствует углу подъема спирали 16 град и числу витков 14). Кроме того считалось, что ОУ прикрывает РЛС по боковому излучению и работает на той же частоте, что и РЛС, а мешающий фон в рассматриваемом диапазоне частот характеризуется средним значением, равным нулю и СКО, равным 2*10-10 вт.
В результате моделирования установлено, что дальности обнаружения парной цели (ИРИ - ОУ) с вероятностью, равной 0.9 (при вероятности ложной тревоги, равной 10-5), составляют по основному излучению РЭС - 298 км. (ограничена дальностью прямой видимости). При этом ППУ разрешает парную цель с дальности 1100 м., а устройство определения направления скачков пеленга срабатывает в этот момент с вероятностью не менее 0.9 и определяет величину скачков пеленга с относительной ошибкой не более 2% от их истинного значения.
Анализ полученных результатов показывает, что предлагаемое техническое решение позволяет с достаточно большой вероятностью формировать сигналы о направлении скачков пеленга в момент разрешения парной цели на борту СНО и достаточно точно определять их величину. При этом в системе управления СНО сигналы, определяющие параметры скачков пеленгов могут использоваться как импульсы запуска процедур решения задач идентификации и перенацеливания СНО на ИРИ.
Изложенные сведения свидетельствуют о возможности выполнения при реализации заявленного устройства определения направления и величины скачков пеленга на борту СНО следующей совокупности условий:
предлагаемое устройство определения направления и величины скачков пеленга на борту СНО при его реализации позволит расширить область применения прототипа за счет извлечения информации об угловых возмущениях из контура углового сопровождения СНО и формирования импульсов, характеризующих направления скачков пеленга на ИРИ или ОУ, а также напряжения, пропорционального величине этих скачков для управления бортовыми средствами защиты СНО от мер противодействия ИРИ самонаводящемуся по радиоизлучению оружию;
показана возможность реализации на практике заявленного устройства определения направления и величины скачков пеленга на борту СНО в том виде, как оно охарактеризовано в формуле изобретения, с помощью описанных в заявке или известных до даты приоритета средств и методов;
предлагаемое устройство определения направления и величины скачков пеленга на борту СНО при его разработке способно обеспечить достижение усматриваемого заявителем технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ФАКТА НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЯ НА РАДИОЭЛЕКТРОННОЕ СРЕДСТВО, ЗАЩИЩЕННОЕ ОТВЛЕКАЮЩИМ УСТРОЙСТВОМ | 2012 |
|
RU2510481C2 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ КЛАССА "ВОЗДУХ - ПОВЕРХНОСТЬ" С ПАССИВНЫМ САМОНАВЕДЕНИЕМ | 1997 |
|
RU2112699C1 |
| Способ формирования помехи типа "антипод" | 2021 |
|
RU2777922C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
| Однопозиционный мультипликативный разностно-относительный способ определения координат местоположения источников радиоизлучения | 2016 |
|
RU2668566C2 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2021 |
|
RU2776155C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
Изобретение относится к средствам управления самонаводящимся по радиоизлучению оружием (СНО) и их бортовой радиоэлектронной аппаратуре. Устройство определения направления и величины скачков пеленга содержит последовательно соединенные антенну (А), приемно-пеленгационное устройство (ППУ) и устройство управления (УУ), а также устройство задержки (УЗ), вычитающее устройство (ВУ), интегрирующее устройство (ИУ), два пороговых устройства (ПУ) и два индикатора скачка пеленга (ИСП), причем первый выход УУ подключен к второму входу ППУ, третий выход которого соединен с третьим входом УУ, пятый и четвертый входы которого подключены к выходам первого и второго ИСП соответственно, входы которых соединены с выходами первого и второго ПУ соответственно, входы которых, а также шестой вход УУ подключены к выходу ИУ, вход которого соединен с выходом ВУ, первый и второй входы которого подключены к выходу УЗ и второму выходу ППУ соответственно, при этом вход УЗ соединен с вторым выходом ППУ, причем первый вход УУ является входом устройства, на который поступают данные целеуказания с носителя СНО, а второй выход УУ - выходом устройства, с которого снимаются сигналы управления. Технический результат изобретения - повышение вероятности определения направления и величины скачков пеленга в момент разрешения групповой цели. 5 ил.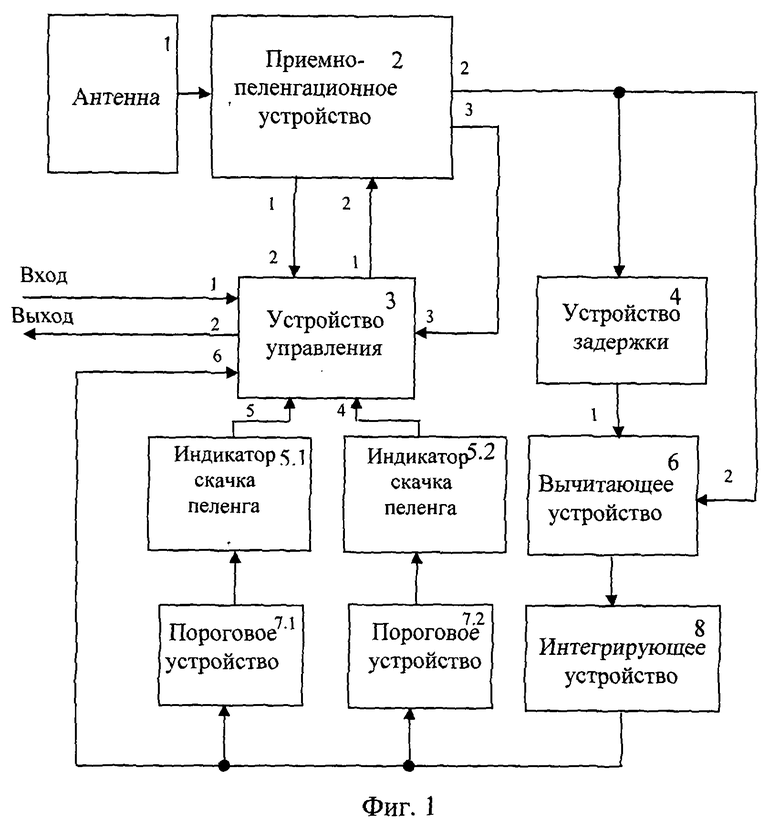
Устройство определения направления и величины скачков пеленга на борту самонаводящегося по радиоизлучению оружия (СНО), содержащее последовательно соединенные антенну, приемно-пеленгационное устройство (ППУ) и устройство управления (УУ), отличающееся тем, что в него введены последовательно соединенные устройство задержки (УЗ), вход которого соединен со вторым выходом ППУ, вычитающее устройство (ВУ), второй вход которого подключен ко второму выходу ППУ, интегрирующее устройство (ИУ), первое пороговое устройство (ПУ), вход которого соединен с шестым входом УУ и входом второго ПУ, первый индикатор скачка пеленга (ИСП), а также последовательно соединенные второе ПУ и второй ИСП, при этом выходы первого и второго ИСП подключены соответственно к пятому и четвертому входам УУ, первый вход которого является входом устройства, второй выход - выходом устройства, третий вход соединен с третьим выходом ППУ, а первый выход со вторым входом ППУ.
| Добыкин В.Д | |||
| и др | |||
| Радиоэлектронная борьба | |||
| Силовое поражение радиоэлектронных систем / М.: Вузовская книга, 2007 (стр.445-446) | |||
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2006 |
|
RU2313054C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ САМОНАВОДЯЩИХСЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1998 |
|
RU2155353C2 |
| Устройство для смывания сахарной свеклы в желоб гидравлического транспортера | 1927 |
|
SU8485A1 |
| US 7508865 B2, 24.03.2009 | |||
| US 4522356 A1, 11.06.1985 | |||
| JP 2003269896 A, 25.09.2003 | |||
| А.Б | |||
| Скорик | |||
| Математическое моделирование зенитных | |||

