Изобретение относится к области управляемого оружия и может быть использовано для управления полетом корректируемой авиационной бомбы (КАБ) при нанесении ударов по радиоэлектронным средствам (РЭС) противника бомбами, оснащенными фугасными боевыми частями (ФБЧ).
Радиоэлектронные объекты, состоящие из радиоизлучающих средств различного функционального назначения (средств радиолокации, радиосвязи, навигационно-временного обеспечения и др.), составляют основу современных и перспективных систем управления ПВО и войсками противника. Одним из наиболее эффективных путей дезорганизации функционирования этих систем является уничтожение их радиоэлектронных средств (РЭС). Поэтому задача огневого поражения РЭС является важнейшей задачей соединений (частей) ВВС при прорыве системы ПВО противника в операциях и боевых действиях объединений (соединений) вооруженных сил.
В военно-воздушных силах задачи поражения командных пунктов, радиолокационных постов, зенитно-ракетных комплексов, узлов связи системы ПВО и их РЭС возлагаются, в первую очередь, на части и подразделения фронтовой авиации (ФА), обладающие наибольшей огневой мощью. В настоящее время наиболее современными и мощными средствами поражения ФА являются корректируемые авиационные бомбы типа «КАБ-500».
Известна система управления (СУ) корректируемых авиационных бомб типа КАБ-500Л, содержащая полуактивную лазерную головку самонаведения (ПЛГС), блок управления (электронно-вычислительное устройство) и блок автоматики в составе последовательно соединенных автопилота и четырех рулевых приводов, работающих на газе турбогенераторного источника питания и приводящих в действие аэродинамические рули. Автопилот стабилизирует бомбу по крену, тангажу и курсу, а также наводит ее на цель по сигналам головки самонаведения. Сброс КАБ производится в расчетной точке, вычисляемой прицельно-навигационным комплексом самолета- носителя, после захвата ПЛГС сигнала подсвета цели, а движение по баллистической траектории. После отделения бомбы от самолета ПЛГС начинает принимать отраженный от цели сигнал лазера подсветки. При всяком отклонении бомбы от курса, заданного ей отраженным лучем лазера, на выходе ПЛГС вырабатывается сигнал рассогласования, который через БУ воздействует на рули бомбы, возвращающие ее на заданный курс. [Интернетсайт Авиационное оружие России/СССР «КАБ-500Л» http://www.airbase.ru/alpha/rus/K/kab/500/1/. Семенов С., Харчев В. По точечным и защищенным… (Журнал «Техника молодежи», №12, 2000 г., с.17]. Недостатками такой системы управления являются: необходимость точного знания местоположения цели; обязательная и непрерывная подсветка цели лучом лазера, причем точность бомбометания определяется тем, насколько стабильно удерживается луч лазера на цели; существенная зависимость от метеорологических факторов (наличие дымки и тумана снижает дальность действия системы наведения бомбы и уменьшает вероятность попадания); малая дальность применения КАБ-500Л (3-9 км при диапазоне высот применения 0,5-5 и 1-8 км соответственно.), обусловленная техническими возможностями ПЛГС и аппаратуры бортовой (наземной) подсветки целей. Поэтому самолеты-носители КАБ с такой системой управления, вынуждены входить достаточно глубоко в зону поражения средств войсковой и объектовой ПВО противника, что существенно снижает вероятность поражения цели (из-за высокой вероятности поражения носителя до момента подлета КАБ к цели) и требует увеличения наряда как самолетов- носителей КАБ-500Л, так и самих КАБ. Кроме того, такие КАБ не могут применяться по важным радиоэлектронным объектам и средствам, координаты которых, как правило, вскрываются средствами радиотехнической разведки с ошибками (СКО) не менее нескольких сотен метров-единиц километров (0.5-1.5 км) и неэффективны в условиях поражения одиночных объектов ограниченным числом бомб (одной-двумя КАБ).
Известна также система управления корректируемых авиационных бомб типа КАБ-500Кр, отличающаяся от СУ бомбы КАБ-500Л наличием телевизионной головки самонаведения (ТВГС) с корреляционной обработкой информации от цели. Такая ТВГС обеспечивает наведение бомбы на объекты, выбор которых осуществляется летчиком. В состав ТВГС входит телевизионная камера, позволяющая просматривать местность перед бомбой на траектории ее полета. Изображение местности передается на самолет-носитель и воспроизводится на экране. При атаке летчик направляет самолет на цель, как только на экране появляется ее изображение, он переводит ТВГС в режим автосопровождения, а затем сбрасывает бомбу. После сбрасывания бомба становится полностью автономной. ТВГС вырабатывает сигналы ошибок, в соответствии с которыми система управления корректирует планирующий полет по направлению к цели. Дальность применения составляет 2-9 км, диапазон высоты применения лежит в пределах 0,5-5 км.
Недостатки такой системы управления в основном аналогичны недостаткам системы управления КАБ-500Л за исключением отсутствия подсвета цели лазером, но дополнительно требуется, чтобы, в ночное время цель была освещена. Точность наведения в простых метеоусловиях КАБ с ПЛГС (круговое вероятное отклонение Екво) на цель составляет 7-10 м, а КАБ с ТВГС - 3-4 м. Сложные метеоусловия (туман, дождь, снег, облачность) существенно ограничивают возможности фронтовой авиации по применению боеприпасов с лазерной и телевизионной системами наведения. [Авиационное оружие России/СССР «КАБ-500Л» http://www.airbase.ru/alpha/rus/K/kab/500/1/. Семенов С., Харчев В. По точечным и защищенным … Журнал «Техника молодежи», №12, 2000 г., с.18].
Наиболее близкой, по технической сущности и достигаемому эффекту, является система управления корректируемой авиационной бомбы типа КАБ-500Л, содержащая полуактивную лазерную головку самонаведения, блок управления (электронно-вычислительное устройство) и блок автоматики в составе последовательно соединенных автопилота и рулевых приводов, работающих на газе турбогенераторного источника питания., которые позволяют с помощью аэродинамических рулей производить коррекцию реальной траектории полета КАБ по углам тангажа и рыскания в интересах обеспечения ее полета по траектории, соответствующей реализованному в КАБ методу наведения (метод погони). [Авиационное оружие России/СССР «КАБ-500Л» http://www.airbase.ru/alpha/rus/K/kab/500/1/. Семенов С., Харчев В. По точечным и защищенным… Журнал « Техника молодежи», №12, 2000 г., с.18].
Отклонение КАБ с такой системой управления во время бомбометания от точки прицеливания дает ошибку (круговое вероятное отклонение Екво) 7-10 м в простых метеоусловиях [Авиационное оружие России/СССР «КАБ-500Л» http://www.airbase.ru/alpha/rus/K/kab/500/1/]. Боевые части КАБ-500 с массой взрывчатого вещества 195 кг [Сайт корпорации «Тактическое ракетное вооружние», http://www.ktrv.ru/produc-tion/68/685/840/], как показывают расчеты, проведенные по методике [Справочник летчика и штурмана. Под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В. Лавского. - М.: Воениздат, 1974 г., с.448], имеют достаточно большой приведенный радиус поражения типовых РЭС (для зоны средних разрушений объектов осколочно-фугасным действием), равный 30-32 метров.
Однако недостатком этой системы является то, что при нанесении ударов по РЭС корректируемыми авиационными бомбами типа КАБ-500Л не обеспечивается высокая вероятность поражения целей как с точно известными координатами, так и целей, местоположение которых определено средствами РТР со значительными ошибками (СКО=1.0-1.5 км и более). В обоих случаях это обусловлено тем, что вероятность сброса бомб и наведения их на цели, а следовательно, и вероятность поражения цели, зависит от вероятности преодоления носителем КАБ зоны поражения средств ПВО противника и вероятности обнаружения РЭС аппаратурой носителя. При этом вероятность поражения РЭС (РКАБ) вычисляется по формуле [Зотов В.П. Вероятностные основы методов оценки эффективности вооружения, выпуск 1. - М.: ВА им. Ф.Э. Дзержинского, 1983 г., с.111]:

где РЛА, n - вероятность поражения носителя средствами ПВО противника и число атак по нему, соответственно;
Роб, Pпор - условные вероятности обнаружения РЭС аппаратурой самолета-носителя КАБ и поражения РЭС боевой частью КАБ соответственно.
Вероятность обнаружения РЭС аппаратурой самолета-носителя (оптико-электронным визиром) определяется по формуле [Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: Радиотехника, 2005 г., с.328]:
L, σрэс - половина ширины зоны обнаружения аппаратуры носителя КАБ по соответствующей оси (X, Y) на максимальной дальности разведки (для ПЛГС-10 км) и СКО ошибки определения местоположения РЭС средствами РТР (ошибки целеуказания) соответственно.
Вероятность Рпор вычисляется по формуле [Фендриков Н.М., Яковлев В.И. Методы расчетов боевой эффективности вооружения. - М.: Воениздат, 1971 г., с.59]:
где Rп, Е, ρ - приведенный радиус поражения РЭС фугасной БЧ КАБ, срединная ошибка наведения КАБ и константа нормального распределения (ρ=0.476) соответственно.
В первом случае (бомбометание по РЭС с точно известным местоположением (σрэс=10 м)), для типовых значений PЛА=0.4, n=2, Rп=30 м и Е=10/1.749 м по формуле (1) получаем РКАБ=0.36. При этом для поражения РЭС с заданной вероятностью Рз не ниже 0.8 потребный наряд ЛА с КАБ определяется по формуле [Фендриков Н.М., Яковлев В.И. Методы расчетов боевой эффективности вооружения. - М.: Воениздат, 1971 г., с.90] 
Во втором случае, при применении КАБ по цели, местоположение которой определено средствами РТР с ошибками σрэс=1,0 км (остальные данные - как в первом случае), вероятность поражения РЭС одной КАБ Ркаб, вычисленная по формуле (1), равна 0.13, а наряд носителей с КАБ, потребный для поражения РЭС с вероятностью Рз не ниже 0.8, - 12 штук. Это свидетельствует о нецелесообразности применения КАБ-500Л по РЭС, координаты которых точно неизвестны.
Технической задачей настоящего изобретения является обеспечение возможности всепогодного наведения КАБ-500 на радиоизлучающую РЭС-цель, местоположение которой определено с ошибками (СКО определения местоположения РЭС средствами РТР 1 км и более) с больших дальностей, превышающих зоны поражения объектовых средств ПВО, увеличение вероятности поражения РЭС-цели одной бомбой снижение расхода бомб за счет использования в системе управления КАБ-500 новых каналов управления, обеспечивающих ее наведение на радиоизлучающую цель как с максимальной дальности сброса КАБ, так и на последнем участке траектории полета. Максимальная дальность полета (80-100 км) технически может быть довольно просто реализована путем установки на КАБ твердотопливного ракетного двигателя (ТРД) и сброса их с большой высоты (8-10 тыс.м) [Семенов С., Харчев В. По точечным и защищенным … Журнал «Техника молодежи», №12, 2000 г., с.16].
Поставленная задача решается за счет того, что в известную систему управления КАБ-500Л, содержащую головку самонаведения (ГС), выполненную в виде полуактивной лазерной, блок управления (БУ) и последовательно соединенные автопилот (АП), рулевые приводы (РП), работающие на газе турбогенераторного источника питания, и аэродинамические рули (АР) дополнительно введены блок связи с аппаратурой носителя (БСН), инерциальная навигационная система (ИНС), два коммутатора (K1, К2), блок формирования команд наведения (БФКН), твердотопливный ракетный двигатель (ТРД) и блок управления ТРД (БУТРД), при этом ГС выполнена в виде пассивной радиотехнической ГС (ПРГС), причем первые управляющие входы коммутаторов К1, К2 и автопилота соединены с первым выходом БУ, первый вход которого соединен с первым выходом БСН, второй вход - со вторым выходом ИНС, а третий вход - с первым выходом ПРГС, второй выход которой подключен ко второму входу коммутатора К1, третий выход ПРГС соединен в первым входом БСН, а вход соединен с третьим выходом БУ, второй выход которого соединен с третьим входом коммутатора К1, первый выход которого соединен со входом БФКН, выход которого подключен ко второму входу коммутатора К2, второй выход коммутатора К1 соединен со входом ИНС, первый выход которой подключен к третьему входу коммутатора К2, а третий выход подключен ко второму входу БУТРД, выход которого соединен с ТРД, а первый вход подключен к четвертому выходу БУ, при этом выход коммутатора К2 соединен с входом АП, причем второй вход БСН является входом, соединенным с выходом аппаратуры целеуказания носителя КАБ, а второй его выход - выходом системы, соединенным с входом аппаратуры управления носителя (например, через разъем связи с самолетом-носителем, срезаемым при пуске КАБ, или по линиям беспроводной связи).
Техническое решение обладает новыми свойствами:
- всепогодностью (независимостью от метеоусловий, времени суток и года), большой дальностью действия, превышающей дальность действия объектовых средств ПВО противника, ограниченной только дальностью радиовидимости);
- высокой точностью наведения КАБ на РЭС-цель за счет использования ИНС и информации об угловой скорости линии визирования цели, измеряемой ПРГС, для управления КАБ и перевода ее в режим самонаведения на излучающее РЭС сразу же после сброса с носителя (с максимальной дальности пуска, ограниченной дальностью полета бомбы или дальностью радиогоризонта) или на последнем участке траектории полета КАБ, после обнаружения и захвата цели ПРГС на рубеже, вычисленном БУ по данным целеуказания с носителя и информации о текущем местоположении КАБ, полученной от ИНС. При этом использование режима пассивного самонаведения по радиоизлучению позволяет увеличить вероятность поражения РЭС одной КАБ в 2.6-7.2 раза по сравнению с прототипом, применяемым соответственно по РЭС-целям, координаты которых известны точно и определены с ошибками.
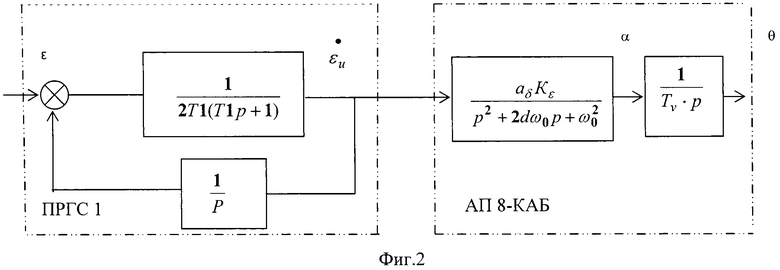
На фиг.1 представлена структурная схема системы управления КАБ. На фиг.2 приведена структурная динамическая схема самонаводящейся по радиоизлучению КАБ. На фиг.3 приведена таблица с точностными характеристиками предложенной системы и прототипа.
Система управления КАБ (фиг.1) содержит ПРГС 1, обеспечивающую раздельное пеленгование и распознавание сигналов различных РЭС, выполненную в виде следящего пеленгатора фазового типа, измеряющего угловую скорость линии визирования цели [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964, с.143-146], БСН 2, выполненный в цифровом виде на основе микропроцессора Intel Pentium T4400, с поддержкой протокола передачи данных Bluetooth или стандарта IEEE 802.11, БУ 3, два коммутатора 4.1 и 4.2, выполненные, например, в виде электромагнитных или электронных реле с соответствующим числом нормально-разомкнутых (замкнутых) контактов на основе микросхемы электронного коммутатора 435КН2 [Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ. пособие, - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989 (Массовая радиобиблиотека; вып. 1143), с.68], БФКН 5, который может быть выполнен как в цифровом, так и в аналоговом исполнении на основе типовых интегральных схем (масштабирующих усилителей, сумматоров, делителей, умножителей и др.), инерциальную навигационную систему 6, выполненную в виде бесплатформенной ИНС с трехстепенным гироскопом и датчиками линейных ускорений, размещенными непосредственно на корпусе КАБ [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. - М.: Транспорт, 1992, с.350], блок управления твердотопливным ракетным двигателем 7, который может быть выполнен в цифровом виде на основе типовых интегральных схем (триггеров, схем сравнения, счетчиков и др.), автопилот 8, рулевые приводы 9 и аэродинамические рули 10, твердо-топливный ракетный двигатель 11, выполненный по типовой схеме, причем первые управляющие входы коммутаторов 4.1, 4.2 и автопилота 8 соединены с первым выходом БУ 3, первый вход которого соединен с первым выходом БСН 2, второй вход - со вторым выходом ИНС 6, а третий вход - с первым выходом ПРГС 1, второй выход которой подключен ко второму входу коммутатора 4.1, третий выход ПРГС 1 соединен в первым входом БСН 2, а вход соединен с третьим выходом БУ 3, второй выход которого соединен с третьим входом коммутатора 4.1, первый выход которого соединен со входом БФКН 5, выход которого подключен ко второму входу коммутатора 4.2, второй выход коммутатора 4.1 соединен со входом ИНС 6, первый выход которой подключен к третьему входу коммутатора 4.2, а третий выход подключен ко второму входу БУТРД 7, выход которого соединен с ТРД 11, а первый вход подключен к четвертому выходу БУ 3, при этом выход коммутатора 4.2 соединен с входом АП 8, выход которого подключен к РП 9, выход которого соединен с АР 10, причем второй вход БСН 2 является входом, соединенным с выходом аппаратуры целеуказания носителя КАБ, а второй его выход - выходом системы, соединенным с входом аппаратуры управления носителя (например, через разъем связи с самолетом-носителем, срезаемым при пуске КАБ, или по линиям беспроводной связи стандарта IEEE 802.11).
Таким образом, заявленная система управления КАБ обеспечивает наведение бомбы на радиоизлучающую цель (РЭС) как с момента ее сброса, так и на последнем участке траектории полета КАБ по измеренным бортовой ПРГС значениям угловой скорости линии визирования КАБ - РЭС-цель.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам предлагаемой системы управления КАБ. Выбор из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности существенных признаков аналога, позволил выявить совокупность существенных по отношению к сформулированному техническому результату признаков в заявленной системе управления, которые изложены в формуле изобретения. Поэтому заявленное изобретение соответствует критерию «новизна».
Для проверки соответствия заявленного изобретения критерию «изобретательский уровень» проведен поиск и анализ известных технических решений с целью выявления признаков, совпадающих с признаками предлагаемой системы управления КАБ. Результаты поиска показали, что заявленное изобретение не вытекает явным образом из известного уровня техники, определенного заявителем. Заявленным изобретением не предусматриваются следующие преобразования:
дополнение известного средства каким-либо известным блоком, присоединяемым к нему по известным правилам, для достижения технического результата;
замена какой-либо части известного средства другой известной частью для достижения технического результата;
увеличение однотипных элементов для достижения сформулированного технического результата;
создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлен по известным правилам, а достигнутый при этом технический результат обусловлен только известными свойствами частей этого средства и связями между ними.
Следовательно, заявленное изобретение соответствует критерию «Изобретательский уровень».
Предлагаемое техническое решение соответствует критерию «промышленная применимость», так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого технического решения могут быть использованы известные материалы и оборудование.
Система управления корректируемой авиационной бомбы работает в двух режимах: 1. Сброс и наведение КАБ на РЭС-цель при захвате и сопровождении цели ПРГС 1 под самолетом-носителем. 2. Сброс КАБ без захвата цели ПРГС 1 под носителем, полет в район цели до рубежа включения ПРГС 1 по программе под управлением ИНС 6 с последующим поиском, захватом и сопровождением цели ПРГС 1 и переходом в режим самонаведения по радиоизлучению РЭС-цели.
В первом режиме система управления КАБ работает следующим образом. После обнаружения РЭС аппаратурой носителя в БСН 2 вводятся данные целеуказания для ПРГС 1 (радиотехнические параметры РЭС-цели, параметры программной траектории полета КАБ в вертикальной плоскости (ВП) под управлением ИНС 6, рубежи перехода на горизонтальный участок полета, включения ТРД 11 и перехода на самонаведение в ВП). После обнаружения цели ПРГС 1 и захвата ее на сопровождение ПРГС 1 выдает в аппаратуру управления носителя через БСН 2 сигнал о захвате цели, после чего производится сброс КАБ. После отделения КАБ она осуществляет полет в ВП по баллистической траектории, параметры которой корректируются ИНС 6, а в горизонтальной плоскости (ГП) управление осуществляется от ПРГС 1. Для этого из БУ 3 на управляющие входы коммутаторов 4.1, 4.2 и автопилота 8 подаются сигналы на подключение входов БФКН 5 и ИНС 6 через коммутатор 4.1 к выходам ПРГС 1 и БУ 3 соответственно, а выходов БФКН 5 и ИНС 6 через коммутатор 4.2 к входам горизонтального и вертикального каналов АП 8 соответственно. При этом параметры траектории в ВП, хранящиеся в БУ 3 (требуемые значения координат X, Y КАБ), сравниваются с текущими параметрами КАБ, измеряемыми ИНС 6, и на ее выходе формируется сигналы управления, поступающие через коммутатор 4.2 в автопилот 8, где формируются сигналы управления, поступающие на РП 9, приводящие к отклонению АР 10. Отклонение АР 10 приводит к возвращению КАБ на расчетную траекторию полета. Одновременно сигнал угловой скорости линии визирования КАБ-РЭС в ГП с выхода ПРГС 1 поступает через коммутатор 4.1 на вход БФКН 5. В БФКН 5 формируется команда, соответствующая методу пропорционального наведения КАБ, имеющая вид [Максимов М.В., Горгонов Г.И. Радиоуправление ракетами. - М.: Сов. радио, 1964, с.60]:
где N1, 
и эта команда через коммутатор 4.2 передается в автопилот 8, где она сравнивается с нормальным ускорением КАБ, измеряемым в автопилоте 8, по результатам сравнения формируется сигнал рассогласования, в соответствии с которым на выходе автопилота 8 создается сигнал управления рулевыми приводами 9. Управляющий сигнал с РП 9 подается на аэродинамические рули 10, перемещение которых приводит к изменению траектории полета КАБ таким образом, что она переходит на траекторию полета, соответствующую методу пропорционального наведения и такой режим сохраняется в ГП до момента встречи КАБ с целью, т.е. до момента подрыва БЧ неконтактным или контактным взрывателями. В процессе полета текущие параметры траектории полета КАБ от ИНС 6 передаются в БУТРД 7, где они сравниваются с параметрами рубежа включения ТРД 11, получаемыми от БУ 3. При их совпадении в БУТРД формируется команда на запуск твердотопливного ракетного двигателя 11 для увеличения скорости (дальности) полета КАБ. Текущие параметры полета от ИНС 6, а также текущее угловое положение линии визирования цели от ПРГС 1 поступают в БУ 3, где они сравниваются с параметрами рубежа перехода КАБ в пикирование на РЭС-цель (рубежа перехода КАБ на режим самонаведения в ВП). При достижении этого рубежа по команде с БУ 3 коммутатор 4.2 отключает выход ИНС 6 от АП 8, подключает вход вертикального канала АП 8 к выходу вертикального канала БФКН 5. Одновременно от БУ 3 поступает команда в АП 8 на изменение его коэффициентов передачи, соответствующих режиму полета по программе в ВП, на коэффициенты, соответствующие режиму самонаведения на РЭС-цель. После поступления этой команды сигнал угловой скорости линии визирования КАБ-РЭС в ВП с выхода ПРГС 1 поступает через коммутатор 4.1 на вход БФКС 5, а в БФКН 5 формируется команда, соответствующая методу пропорционального наведения КАБ в вертикальной плоскости, имеющая вид, аналогичный команде в горизонтальном канале. Эта команда через коммутатор 4.2 передается в АП 8, на выходе которого создается сигнал управления рулевыми приводами 9. Управляющий сигнал с РП 9 подается на аэродинамические рули 10, перемещение которых приводит к изменению траектории полета КАБ в вертикальной плоскости в соответствии с методом пропорционального наведения.
Во втором режиме система управления КАБ работает следующим образом.
Перед сбросом КАБ в блок управления (БУ) 3 вводится расчетная траектория полета КАБ и данные целеуказания для ПРГС 1 (радиотехнические параметры цели и рубеж включения ТРД и ПРГС). После отделения КАБ она осуществляет полет по баллистической траектории, параметры которой корректируются ИНС 6. При этом параметры расчетной траектории, хранящиеся в БУ 3 (требуемые значения координат х, у, z PC), сравниваются с текущими параметрами КАБ, измеряемыми ИНС 6, и на ее выходе формируются сигналы коррекции, которые через коммутатор 4.2 (в исходном состоянии выход ИНС 6 подключен к автопилоту 8) поступают в автопилот 8, где формируются сигналы управления, воздействующие на РП 9 и АР 10 КАБ и приводящие к возврату КАБ на расчетную (требуемую) траекторию полета. В процессе полета текущие параметры полета КАБ с выхода ИНС 6 поступают на вход БУ 3 и БУТРД 7, где сравниваются с параметрами рубежей включения ПРГС 1 и ТРД 11 соответственно. При подлете КАБ к рубежу включения ТРД 11 в БУТРД 7 на основе сравнения данных, поступающих из БУ 3 и ИНС 6, формируется команда на включение ТРД 11 для увеличения дальности полета КАБ, а при достижении рубежа включения ПРГС 1 из БУ 3 в ПРГС 1 выдается команда на включение ПРГС 1 и переход ее в режим поиска РЭС - цели, заданной целеуказанием, поступающим из БУ 3 вместе с этой командой. ПРГС 1 начинает функционировать в режиме поиска РЭС по частоте и радиотехническим параметрам, и после обнаружения заданной цели выдает соответствующий сигнал в БУ 3. После получения из БУ 3 команды на захват и сопровождение РЭС-цели ПРГС 1 переходит в режим сопровождения этой цели и выдает в БУ 3 сигнал, подтверждающий выполнение команды. После этого БУ 3 выдает команду на первые входы коммутаторов 4.1, 4.2 на их переключение в режим «самонаведение», а также команду на автопилот 8 на изменение его коэффициентов передачи, соответствующих режиму полета по баллистической траектории, на коэффициенты, соответствующие режиму самонаведения на РЭС-цель. После поступления этой команды сигнал угловой скорости линии визирования КАБ-РЭС с выхода ПРГС 1 поступает через коммутатор 4.1 на вход БФКС 5, а выход БУ 3 отключается от входа ИНС 6. В БФКН 5 таким же образом, как в первом режиме, формируется команда, соответствующая методу пропорционального наведения КАБ. Эта команда передается в автопилот 8, на выходе которого создается сигнал управления рулевыми приводами, в соответствии с которым происходит перемещение АР 10, приводящее к переходу КАБ на траекторию полета, соответствующую методу пропорционального наведения. Такой режим сохраняется до момента встречи КАБ с целью.
Для исследования точностных характеристик КАБ, оснащенных предлагаемой системой управления, на основе структурной динамической схемы (фиг.2) с использованием методов теории радиоуправления и случайных процессов была разработана статистическая имитационная модель процесса самонаведения КАБ на наземную радиоизлучающую цель.
Модель описывает динамику полета и самонаведения КАБ с системой наведения, приведенной на фиг.1, и представляется следующей системой дифференциальных уравнений:
где ε, 
ξбш, σn, - белый шум с нулевым математическим ожиданием и спектральной плотностью R0, среднеквадратическое значение ошибки пеленгования ПРГС соответственно;
ξε, 
σB, τB - среднеквадратическое значение и время корреляции порывов ветра соответственно;
σpr, σa - среднеквадратические значения случайной составляющей угловой скорости прецессии гироплатформы и ошибки акселерометра в измерении нормального ускорения соответственно;
θB - флуктуационная составляющая угла, характеризующего направление вектора скорости θ УО, обусловленная ветровыми возмущениями;
Θ - допустимые значения угловой скорости изменения угла атаки КАБ, определяемые допустимыми нормальными ускорениями;
Tv, ω0, d - постоянная времени, собственная частота колебаний КАБ и коэффициент демпфирования автопилота соответственно;
Ti, Ki - постоянные времени i-x элементов контура (фильтров, ПРГС) и их коэффициенты усиления (передачи по скорости) соответственно;
Сх, Pdv, Va - аэродинамический коэффициент, тяга двигателя и скорость на активном участке траектории полета КАБ соответственно;
Кυ, 
 - коэффициенты передачи соответствующих элементов автопилота;
- коэффициенты передачи соответствующих элементов автопилота;
α, S, G, m - угол атаки, площадь крыла, вес и масса КАБ соответственно;
ρ(yrs) - плотность воздуха на соответствующей высоте полета КАБ;
Vx, Vy, Д, xrs, yrs, xc, yc - проекции скорости полета КАБ на оси х, у, наклонная дальность до цели и координаты (x, y) КАБ и цели соответственно;
Ф, FB(t), FG(t), ТР1, Δ - функция Хевисайда, временные логические (переключательные) функции, задающие различную продолжительность работы системы автономной коррекции и ПРГС, момент перехода КАБ на самонаведение и время задержки подключения автопилота к ПРГС соответственно;
FD(t), Tpd1, Tpd2 - временная логическая функция, задающая продолжительность работы ТРД, момент включения и выключения ТРД соответственно.
С использованием данной математической модели была оценена точность самонаведения КАБ, имеющей характеристики, близкие к характеристикам КАБ-500 [Авиационное оружие России / СССР.КАБ-500Л http://airbase.ru/alpha/rus/k/kab/500/1/], оснащенной системой управления, выполненной по приведенной на фиг.1 схеме, на наземную РЛС. При этом точностные характеристики КАБ оценивались по показателю - среднеквадратическое отклонение (СКО) промаха (σ) в вертикальной плоскости.
Считалось, что пуск КАБ производился с максимальной дальности (80 км), обеспечиваемой за счет установки дополнительного твердотопливного ракетного двигателя. Моделировался последний участок траектории полета КАБ на дальности (наклонной) 10 км от цели. Считалось, что на КАБ воздействуют порывы ветра, характеризующиеся спектральной плотностью мощности флуктуации скорости
где σv - среднее квадратическое значение скорости порывов ветра; τv - время корреляции порывов ветра. При моделировании принималось, что для КАБ - σv=1-2 м/с, τv=1 с.
Предполагалось, что центр излучения РЛС блуждает и спектральная плотность мощности его отклонений описывается функцией
где σb - среднее квадратическое значение отклонений (σb=10 м); τb - время корреляции отклонений (τb=1 с); ω0 - угловая скорость вращения антенны РЛС (ω0=1 с-1).
Кроме того, были приняты следующие численные значения для элементов, приведенных в математической модели: ω0=0.8, аδ=0.58, d=0.7, Кг=1.8, Tr=0.15, Т2=0.08, Т3=0.3, Т4=0.2, Tv=0.5, σр=0.5, Θ=0.392.
Результаты моделирования приведены в таблице, где представлены значения промаха КАБ в зависимости от ошибок пеленгования ПРГС и соответствующие вероятности поражения РЛС одной бомбой. Кроме того, в таблице приведены вероятности поражения РЛС одной корректируемой авиабомбой типа КАБ-500Л при применении ее с типовых дальностей сброса (с заходом в зону поражения ЗРК) по РЛС с точно и неточно известными координатами (определенными с ошибками (СКО), равными 1000 м).
Анализ полученных результатов показывает, что предлагаемое техническое решение увеличивает вероятность поражения РЭС-цели в 2.6-7.2 раза по сравнению с прототипом, а требуемый наряд КАБ для поражения РЭС с вероятностью не менее 0.8 снижается в 4-12 раз при нанесении ударов по РЭС с точно и неточно известными координатами соответственно.
Изложенные сведения свидетельствуют о возможности выполнения при реализации заявленной системы управления следующей совокупности условий:
предлагаемая система управления при ее реализации позволит обеспечить эффективное применение КАБ по излучающим радиоэлектронным средствам противника;
показана возможность реализации на практике заявленной системы управления КАБ в том виде, как она охарактеризована в формуле изобретения, с помощью описанных в заявке или известных до даты приоритета средств и методов;
предлагаемая система управления КАБ при ее разработке способна обеспечить достижение усматриваемого заявителем технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| АВИАЦИОННАЯ БОМБА С КОРРЕКТИРУЕМЫМИ АЭРОДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ | 2003 |
|
RU2265792C2 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2013 |
|
RU2527609C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ФАКТА НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЯ НА РАДИОЭЛЕКТРОННОЕ СРЕДСТВО, ЗАЩИЩЕННОЕ ОТВЛЕКАЮЩИМ УСТРОЙСТВОМ | 2012 |
|
RU2510481C2 |
| СПОСОБ ВЫСОКОТОЧНОГО ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2014 |
|
RU2598687C2 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2713546C2 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
Изобретение относится к оборудованию для управляемого оружия и предназначено для использования при управлении полетом корректируемой авиационной бомбы (КАБ) с целью поражения радиоэлектронных средств (РЭС) противника. Система содержит пассивную радиотехническую головку самонаведения (ПРГС), блок связи с носителем (БСН), блок управления (БУ), два коммутатора, блок формирования команд наведения (БФКН), инерциальную навигационную систему (ИНС), блок управления твердотопливным ракетным двигателем (БУТРД), автопилот (АП), рулевые приводы (РП), аэродинамические рули (АР) и твердотопливный ракетный двигатель (ТРД). Первые управляющие входы коммутаторов K1, K2 и автопилота соединены с первым выходом БУ, первый вход которого соединен с первым выходом БСН, второй вход - со вторым выходом ИНС, а третий вход - с первым выходом ПРГС. Второй выход ПРГС подключен ко второму входу коммутатора K1, третий выход соединен в первым входом БСН, а вход соединен с третьим выходом БУ. Второй выход БУ соединен с третьим входом коммутатора K1, первый выход которого соединен со входом БФКН. Выход БФКН подключен ко второму входу коммутатора K2, второй выход коммутатора K1 соединен с входом ИНС. Первый выход ИНС подключен к третьему входу коммутатора K2, а третий выход - к второму входу БУТРД. Выход БУТРД соединен с ТРД, а первый вход подключен к четвертому выходу БУ. Выход коммутатора K2 соединен с входом АП. При этом второй вход БСН является входом, а второй его выход - выходом системы. Изобретение обеспечивает повышенную вероятность поражения РЭС-цели и сокращение требуемого наряда КАБ для поражения РЭС. 2 ил, 1 табл.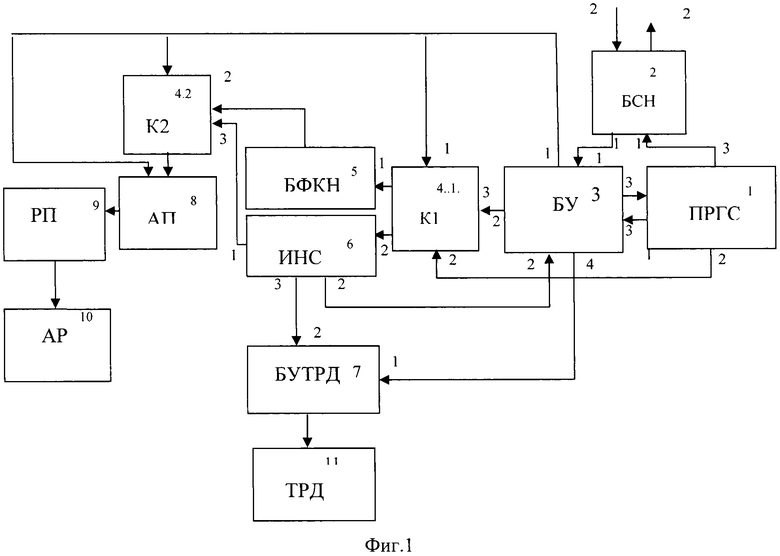
Система управления корректируемой авиационной бомбой, предназначенной для поражения радиоэлектронных средств противника, содержащая головку самонаведения (ГС), блок управления (БУ) и последовательно соединенные автопилот (АП), рулевые приводы (РП), работающие на газе турбогенераторного источника питания, и аэродинамические рули (АР), отличающаяся тем, что в нее введены блок связи с аппаратурой носителя (БСН), инерциальная навигационная система (ИНС), два коммутатора (K1, K2), блок формирования команд наведения (БФКН), твердотопливный ракетный двигатель (ТРД) и блок управления ТРД (БУТРД), при этом ГС выполнена в виде пассивной радиотехнической ГС (ПРГС), причем первые управляющие входы коммутаторов K1, K2 и автопилота соединены с первым выходом БУ, первый вход которого соединен с первым выходом БСН, второй вход - со вторым выходом ИНС, а третий вход - с первым выходом ПРГС, второй выход которой подключен ко второму входу коммутатора K1, третий выход ПРГС соединен с первым входом БСН, а вход соединен с третьим выходом БУ, второй выход которого соединен с третьим входом коммутатора K1, первый выход которого соединен со входом БФКН, выход которого подключен ко второму входу коммутатора K2, второй выход коммутатора K1 соединен со входом ИНС, первый выход которой подключен к третьему входу коммутатора K2, а третий выход подключен ко второму входу БУТРД, выход которого соединен с ТРД, а первый вход подключен к четвертому выходу БУ, при этом выход коммутатора K2 соединен с входом АП, причем второй вход БСН является входом, а второй его выход - выходом системы.
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБЫ, ВЫПОЛНЕННОЙ ПО СХЕМЕ "УТКА", С ЛАЗЕРНОЙ ФЛЮГЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2251656C1 |
| 0 |
|
SU80225A1 | |
| 0 |
|
SU80224A1 | |
| Стыковочное устройство трелевочно-транспортного средства | 1988 |
|
SU1564010A1 |

