Изобретение относится к измерительной технике, а именно - к средствам контроля угла поворота тел вращения.
Известно устройство измерения геометрических параметров [см. способ и устройство измерения геометрических параметров и указания мест установки грузов при динамической балансировке. Патент №2438106 (13) C1. МПК G01М 1/00].
Недостатком устройства является его сложность, заключающаяся в применении вычислительного устройства, измерительной оптической стереосистемы, состоящей из двух бесконтактных измерительных устройств, с помощью которых определяют геометрические параметры положения грузов любого типа, как равные положениям световых меток.
Наиболее близким к предлагаемому является устройство, выбранное по патенту [см. бесконтактный датчик углового положения вала. Патент №2378613 (13) С2. МПК. G01B 7/30]. Сущность конструкции состоит в том, что датчик содержит магниточувствительный элемент, расположенный неподвижно в центре кольцевого ротора-магнита. Ротор-магнит намагничен радиально со спаданием поля от центра к краям полуколец, при этом у одного его полукольца векторы индукции направлены наружу, а у другого вовнутрь. Направление чувствительности магниточувствительного элемента лежит в плоскости ротора-магнита. Во внутренней полости ротора-магнита неподвижно и симметрично размещены два одинаковых сегмента-магнитопровода, образующие немагнитные зазоры с ротором-магнитом и эквидистантную немагнитную щель между собой, перпендикулярную направлению чувствительности магниточувствительного элемента. Вся конструкция помещена соосно в цилиндрический магнитный экран.
Недостатком данного устройства бесконтактного датчика углового положения вала является ограниченная возможность применения в связи с отсутствием визуального отсчета угла поворота вала.
Задачей предлагаемого изобретения является расширение области применения. Это достигается расширением функциональных возможностей устройства отсчета угла поворота шпинделя за счет предлагаемого схемного решения и использованием визуального отсчета угла поворота. Предлагаемое устройство, наряду с упрощением конструкции, обеспечивает повышение надежности и улучшение динамических свойств устройства отсчета угла поворота шпинделя за счет применения датчиков угла поворота шпинделя и датчика индекса (начала отсчета) выполненных в виде оптоэлектронных пар, каждый из которых подключен к предварительным усилителям! низкой частоты, счетчикам, дешифраторам и двум матричным семисегментным светодиодным индикаторам.
Поставленная задача решается следующим образом: устройство отсчета угла поворота шпинделя содержит датчик угла поворота шпинделя и датчик индекса, выполненные в виде двух оптоэлектронных пар, лампа накаливания - фотодиод и дисковой пластины с отверстиями, выходы каждого из которых подключены к входам предварительных усилителей низкой частоты, выходы которых подключены к входам счетчиков, выходы которых подключены к входам дешифраторов, выходы которых подключены к входам двух матричных семисегментных светодиодных индикаторов для визуального отсчета угла поворота шпинделя. Техническим результатом является расширение функциональных возможностей устройства отсчета угла поворота шпинделя за счет применения датчика угла поворота шпинделя и датчика индекса, выполненных в виде оптоэлектронных пар и дисковой пластины с отверстиями, а также схемного решения, состоящего в применении предварительных усилителей низкой частоты, счетчиков и дешифраторов, подключенных к двум матричным семисегментным светодиодным индикаторам.
Сравнительный анализ с прототипом показывает, что предлагаемое устройство отличается тем, что датчик угла поворота шпинделя и датчик индекса выполнены в виде двух оптоэлектронных пар, лампа накаливания - фотодиод и дисковой пластины с отверстиями для них, выходы каждого из которых подключены к входам предварительных усилителей низкой частоты, выходы которых подключены к входам счетчиков, выходы которых подключены к входам дешифраторов, выходы которых подключены к входам двух десятичных матричных семисегментных светодиодных индикаторов для визуального отсчета угла поворота шпинделя.
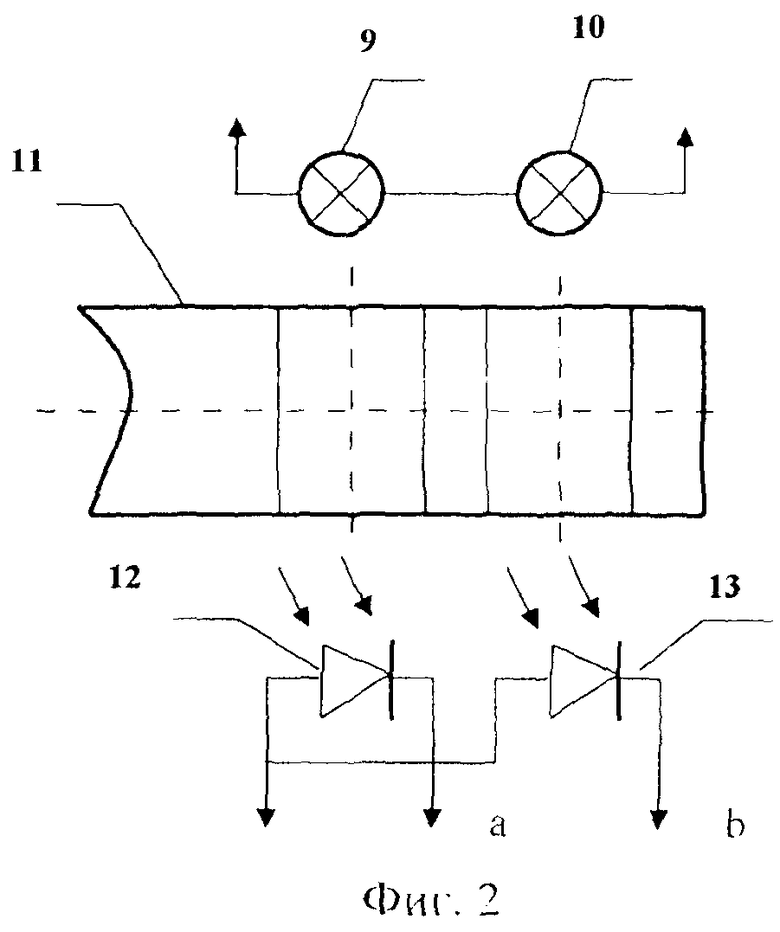
Сущность предложенного технического решения поясняется чертежом (фиг.1, фиг.2, фиг.3). Предложенное устройство содержит датчик угла поворота шпинделя и датчик индекса, выполненные в виде оптоэлектронных пар, состоящих из лампы накаливания 9, 10, фотодиода 12, 13 и дисковой пластины 11 с отверстиями для них (фиг.2), выходы которых подключены к входам предварительных усилителей низкой частоты 1 и 2, в которых имеются цепи входных сигналов на элементах C1, R1, R2 и С5, R6, R7, цепи обратных связей на элементах С3, R4 и С7, R9 и цепи коррекции на элементах С2, R3, С4 и С6, R8, С8, выходы которых через резисторы R5 и R10 подключены к входам счетчиков 3, 4, выходы которых подключены к входам дешифраторов 5, 6, выходы которых поступают на входы десятичных матричных семисегментных светодиодных индикаторов 7, 8 (фиг.1) для визуального отсчета угла поворота шпинделя.
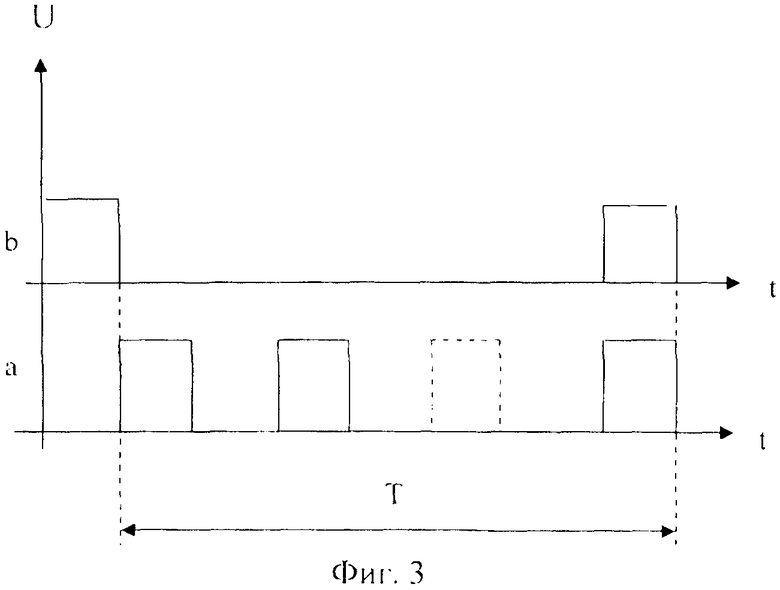
Временная диаграмма действующих сигналов представлена на фиг.3: U - напряжение, t - время; а - сигнал отсчета угла поворота, b - сигнал индекса, являющиеся выходными для элементов 12, 13 (фиг.1) и входными для элементов C1, С5 (фиг.2). Формирование сигналов отсчета угла поворота осуществляется следующим образом. На вход устройства поступает сигнал индекса b (фиг.2), определяющий длительность такта Т, в течение которого происходит отсчет импульсов сигнала а (фиг.3), определяющего углы поворота, пропорциональные количеству импульсов отсчета, а именно: 00, 20, 40, 60, 80 и 100.
Устройство работает следующим образом (фиг.1, фиг.2, фиг.3). Импульсы а и b, которые формируются от элементов 9, 12 датчика отсчета угла поворота шпинделя и элементов 10, 13 датчика индекса, при вращении дисковой пластины 11 (фиг.2), с отверстиями для них, подаются на входы предварительных усилителей низкой частоты 1 и 2, в которых имеются цепи входных сигналов на элементах C1, R1, R2 и С5, R6, R7, цепи обратных связей на элементах С3, R4 и С7, R9 и цепи коррекции на элементах С2, R3, С4 и С6, R8, С8 (фиг.1). Усиленные сигналы а и b, через резисторы R5 и R10 поступают на входы счетчиков 3 и 4, выходы которых управляют входами дешифраторов 5 и 6, а сигналы с их выходов управляют входами каждого десятичного матричного семисегментного светодиодного индикатора 7, 8 (фиг.1) для визуального отображения количества импульсов отсчета угла поворота. Например, для формирования сигнала а дисковая пластина 11 выполняется с отверстиями по периметру и с отверстием по окружности другого диаметра для формирования сигнала индекса b (фиг.2). Визуальный отсчет числа импульсов n на десятичных матричных светодиодных индикаторах 7, 8, равный «00», «20», «40», «60» «80» и «00» соответствует определенному углу поворота шпинделя. При этом цена импульса вычисляется из соотношения q=360/n и составляет 3,6 град (при n=100). Затем определяются углы αn=q×n, соответствующие 5-ти узловым точкам окружности, относительно которых размещают балансировочные грузы расчетной массы. Интегральные микросхемы предварительных усилителей, счетчиков, дешифраторов и семисегментных индикаторов могут быть выполнены, например, на ИМС К548УН1Б, 74LS90D (К155ИЕ2), 7447N (К514ИД2) и АЛС321А соответственно.
Применение устройства позволит обеспечить повышение надежности и улучшение динамических свойств управляемого электрического привода с визуальным отсчетом угла поворота шпинделя.
Повышение эффективности устройств отсчета угла поворота тел вращения подобного типа основано на сочетании электронно-механических средств и средств вычислительной техники, предназначенных для контроля угловых перемещений, что позволит повысить конкурентоспособность предложенного устройства.
Источники информации:
1. Способ и устройство измерения геометрических параметров и указания мест установки грузов при динамической балансировке. Патент РСФСР №2438106 (13) С1. МПК G01М 1/00].
Перечень фигур:
Фиг.1. Схема электрическая принципиальная устройства отсчета угла поворота шпинделя.
Фиг.2. Датчик угла поворота и датчик индекса.
Фиг.3. Временная диаграмма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров на вращающемся объекте | 1983 |
|
SU1099104A2 |
| Устройство для ультразвуковых измерений | 1989 |
|
SU1633353A1 |
| Светодиодный индикатор Ермакова (варианты) | 2017 |
|
RU2673000C1 |
| Устройство регулировки осветительно-проекционных систем | 1987 |
|
SU1580307A1 |
| ДИСКРЕТНЫЙ ЭЛЕКТРОННЫЙ ЗАДАТЧИК ТЕМПЕРАТУРЫ | 1993 |
|
RU2067358C1 |
| Устройство индикации и управления для станков | 1985 |
|
SU1290262A1 |
| Тренажер обучения вождению гусеничной машины | 2019 |
|
RU2723504C1 |
| Устройство для стабилизации заданной высоты полета | 1987 |
|
SU1505283A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДИСКРЕТНЫХ СИГНАЛОВ В ЛИНИЮ СВЯЗИ | 2006 |
|
RU2313914C1 |
| Способ питания светодиодных блоков индикаторов и устройство для его реализации Ермакова В.Ф. | 2018 |
|
RU2713191C1 |
Предлагаемое устройство относится к средствам измерений, а именно к устройствам отсчета угла поворота тел вращения. Устройство отсчета угла поворота шпинделя, содержит датчик угла поворота и датчик индекса, предварительные усилители низкой частоты, выходы которых через резисторы подключены к входам счетчиков, выходы которых подключены к входам дешифраторов, выходы которых подключены к входам матричных семисегментных светодиодных индикаторов. При этом датчик угла поворота и датчик индекса выполнены в виде двух оптоэлектронных пар, каждая из которых состоит из лампы накаливания, фотодиода и дисковой пластины с отверстиями для них, а их выходы подключены к входам предварительных усилителей низкой частоты, в каждом из которых имеются цепи входных сигналов, обратной связи и коррекции. Технический результат изобретения - повышение надежности и улучшение динамических свойств управляемого электрического привода. 3 ил.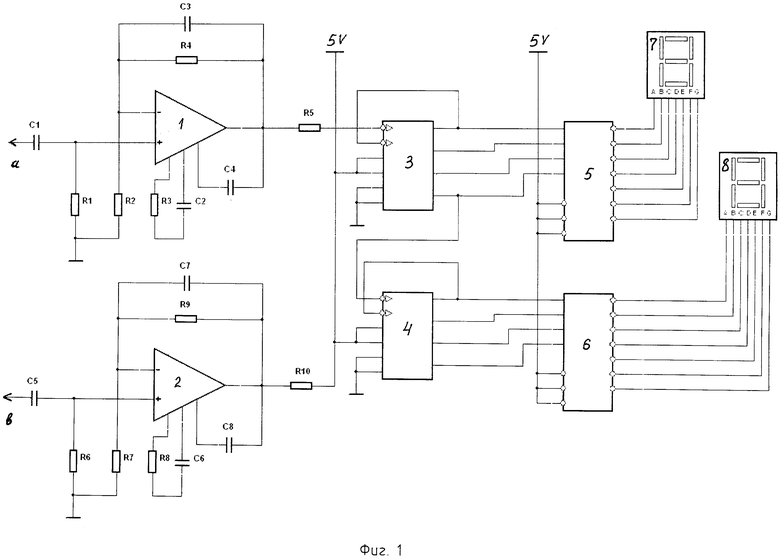
Устройство отсчета угла поворота шпинделя, содержащее датчик угла поворота и датчик индекса, предварительные усилители низкой частоты, выходы которых через резисторы подключены к входам счетчиков, выходы которых подключены к входам дешифраторов, выходы которых подключены к входам матричных семисегментных светодиодных индикаторов, отличающееся тем, что датчик угла поворота и датчик индекса выполнены в виде двух оптоэлектронных пар, каждая из которых состоит из лампы накаливания, фотодиода и дисковой пластины с отверстиями для них, а их выходы подключены к входам предварительных усилителей низкой частоты, в которых имеются цепи входных сигналов, обратной связи и коррекции, выходы которых через резисторы подключены к входам счетчиков, выходы которых подключены к входам дешифраторов, выходы которых поступают на входы двух десятичных матричных семисегментных светодиодных индикаторов для отсчета угла поворота.
| SU 1620828 A2, 15.01.1991 | |||
| Устройство для измерения угловых перемещений объекта | 1986 |
|
SU1416864A1 |
| Многооборотный преобразователь угол - код | 1990 |
|
SU1711329A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК ПОВЕРХНОСТИ ОБЪЕКТОВ | 1993 |
|
RU2049980C1 |
| US 6396052 B1, 28.05.2002 | |||
| 0 |
|
SU158781A1 | |
| US 5825307 A1, 20.10.1998. | |||

