Изобретение относится к контрольно-измерительной технике, к способам и устройствам контроля линейных смещений объектов оптико-электронными методами и может быть использовано для линейного контроля взаимного положения элементов крупногабаритных сооружений, соосных деталей (турбоагрегатов АЭС, направляющих крупногабаритных станков и т.п.), смещения их осей, измерения непараллельности, неплоскостности, неперпендикулярности и величин их прогибов в процессе ремонта, настройки и эксплуатации.
Известны технические решения контроля линейных смещений объектов, основанные на формировании равносигнальной базовой линии. Например, способ и устройство для измерения линейного смещения объекта /а.с. СССР, №1312384, МПК G01B 21/00, опубл. 23.05.1987/. Данный способ включает формирование равносигнальной базовой линии, формирование на позиционно-чувствительном приемнике распределения облученности, преобразование светового сигнала в электрический с выделением разностного сигнала, компенсацию сигнала рассогласования (приведение в ноль) смещением базовой линии и определение по нему величины смещения объекта. Устройство содержит предназначенный для размещения на объекте контрольный элемент в виде зеркально-линзового отражателя, приемную систему с размещенным по ходу луча объективом, светоделителем и фотоприемником, блоком обработки сигналов с выделением разностного и привод с регистратором. Отраженный от смещенного объекта поток излучения направляют на фотоприемник, сигнал с которого поступает на блок обработки сигналов, где вырабатывается сигнал управления перемещением плоскопараллельной пластины для реализации нулевого метода.
К существенным недостаткам этой группы изобретений относится невысокая точность при работе в большом диапазоне рабочих дистанций, вызванная нестабильностью положения равносигнальной зоны, необходимостью компенсации разностного сигнала, большим разбросом чувствительности в пределах диапазона измерений.
Известны способ и устройство измерения линейного смещения объекта, основанные на прямом методе измерений, отличном от «нулевого», выбранные в качестве прототипа (пат. РФ, №2252395, МПК G01B 11/00, 11/02, опубл. 20.05.2005/. Способ включает формирование равночувствительной базовой линии, формирование распределения облученности в изображении протяженного равнояркого излучателя для разных дистанций в пределах измеряемого диапазона, причем распределение облученности от каждой дистанции формируют по форме в виде квадрата, с зоной постоянной облученности в центре изображения излучателя и ее спадом к границе изображения световой марки по линейному закону, преобразование светового сигнала в электрический, измерение базового сигнала, выделение и регистрацию сигнала рассогласования, определение величины смещения. Регистрируемый сигнал рассогласования имеет линейную зависимость от величины смещения, которая в свою очередь зависит для всех измерительных дистанций только от нормированного сигнала рассогласования при постоянном коэффициенте пропорциональности. Устройство содержит предназначенный для размещения на контролируемом объекте протяженный равнояркий излучатель, установленный на оптической оси прибора с возможностью перемещения в плоскостях, перпендикулярных ей, приемную систему из объектива и фотоприемного устройства с четырьмя чувствительными площадками, границы раздела которых совпадают с координатными осями ОХ и OY и имеют общую точку, которая с центром входного зрачка объектива лежит на оптической оси, образующей базовую линию, от которой ведется отсчет измерения линейных смещений, соединенный с выходами чувствительных площадок блок обработки электрических сигналов для выделения и регистрации сигналов рассогласования с вычислением величины смещения объекта относительно базовой линии. В устройстве на оптической оси прибора дополнительно установлены две квадратные диафрагмы разного размера у входного зрачка излучателя и у входного зрачка объектива приемной системы. Фотоприемное устройство выполнено в виде квадратного приемника, установленного в фокальной плоскости объектива приемной системы.
К существенным недостаткам данного способа и устройства для его осуществления можно отнести технологическую сложность обеспечения равномерности облученности в плоскости изображения; технологическую сложность реализации равнояркого протяженного излучателя и конструкции в целом; высокую чувствительность показаний к точности выставления взаимного положения частей устройства; нестабильность показаний во времени, обусловленная нестабильностью характеристик основных узлов устройства, в том числе излучателя.
Задачей заявляемых способа и устройства для его осуществления является сохранение точности измерения при упрощении требований к характеристикам и параметрам излучателя (равнояркость излучающей поверхности), формируемого изображения (равномерность освещенности) и других функциональных узлов, влекущем за собой снижение требований к качеству исполнения отдельных узлов системы, увеличение степени их взаимозаменяемости, универсализацию работы устройства, снижение требований к точности установки частей системы и связанное с этим упрощение настройки и эксплуатации.
Указанная задача решается за счет того, что в способе измерения линейного смещения объекта, включающем формирование облученности в плоскости изображения излучателя для разных дистанций в пределах диапазона измерений, преобразование оптического сигнала в электрический и определение величины смещения, новым является то, что распределение облученности формируют в виде двух квазиточечных пятен рассеяния, преобразуют электрический сигнал к цифровому виду, вычисляют горизонтальные и вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния, рассчитывают координаты середины отрезка между пятнами рассеяния по формулам:
 и
и  ,
,
где х′, y′ - координаты центра отрезка между пятнами рассеяния,
x1, x2 - горизонтальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно,
y1, y2 - вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно,
а величину смещения контролируемого объекта X, Y определяют из соотношения:
X=x′·M и Y=y′·M,
где  - масштабный коэффициент М, вычисляемый автоматически для каждой дистанции, В - длина базового отрезка в пространстве предметов.
- масштабный коэффициент М, вычисляемый автоматически для каждой дистанции, В - длина базового отрезка в пространстве предметов.
В устройстве для измерения линейного смещения объекта, включающем предназначенный для размещения на контролируемом объекте излучатель, приемную систему, оптически сопряженную с излучателем, содержащую объектив и фотоприемное устройство, выход которого соединен с входом блока обработки электрических сигналов, новым является то, что устройство содержит дополнительный излучатель, размещенный в той же плоскости на фиксированном расстоянии от первого, плоскость размещения излучателей параллельна плоскости фоточувствительной площадки фотоприемного устройства, установленного в плоскости изображения объектива, причем каждый из излучателей выполнен в виде точечного источника излучения, в устройство введен блок управления излучателями, содержащий два канала управления излучателями и микроконтроллер, выходы которого соединены с входами каждого из каналов управления излучателями, а вход микроконтроллера соединен с первым выходом электронной вычислительной машины, второй выход которой подключен к входу блока обработки электрических сигналов, а выходы каждого канала управления излучателями соединены с входами соответствующих излучателей, приемная система содержит оптический фильтр, размещенный перед объективом, а фотоприемное устройство выполнено в виде матричного приемника излучения. Кроме того, каждый из излучателей выполнен в виде полупроводникового излучающего диода, каждый из каналов управления излучателями состоит из инвертора и усилителя, выполняющих широтно-импульсную модуляцию, а электронная вычислительная машина выполнена в виде персонального компьютера.
Сущность изобретения поясняется чертежом, где изображена структурная схема устройства, реализующего способ измерения линейного смещения объектива. Устройство состоит из двух излучателей 1, 2 и трех блоков: блока управления излучателями 3, состоящего из двух каналов управления 4 и 5 излучателями и микроконтроллера 6, приемной системы 7, состоящей из последовательно расположенных оптического фильтра 8, объектива 9, фотоприемного устройства 10 и блока обработки электрических сигналов 11. На входы излучателей 1 и 2 подаются управляющие сигналы с выходов соответствующих каналов управления излучателями 4 и 5 блока управления излучателями 3. Управляющие сигналы формируются микроконтроллером 6, подключенным к первому выходу электронной вычислительной машины 12. Оптическое излучение с выходов излучателей 1 и 2 попадает в приемную систему 7, где, пройдя через оптический фильтр 8 и объектив 9, попадает на фоточувствительную площадку фотоприемного устройства 10 и преобразуется в электрический сигнал. С выхода фотоприемного устройства 10 электрический сигнал поступает на вход блока обработки электрических сигналов 11, подключенного к электронной вычислительной машине 12. Необходимые напряжения питания вырабатываются блоком питания (на фигуре не показан).
Устройство работает следующим образом.
Перед началом измерения излучатели 1 и 2 закрепляются на контролируемом объекте, так чтобы плоскость их установки была параллельна плоскости фоточувствительной площадки фотоприемного устройства 10 и чтобы излучатели 1, 2 попадали в поле зрения приемной системы 7. В режиме ожидания приемная система 7 производит непрерывную съемку лежащей в ее поле зрения части пространства, но полученные при этом кадры не сохраняются и не обрабатываются. Излучатели 1 и 2 при этом находятся в выключенном состоянии. По сигналу от электронной вычислительной машины 12 в микроконтроллер 6 поступает управляющий сигнал, по которому каналы управления излучателями 4 и 5 вырабатывают сигнал активации излучателей 1 и 2. При необходимости контраст изображения может регулироваться изменением яркости излучателей 1, 2 посредством пересылки необходимых команд в блок управления излучателями 3. Оптическое излучение от излучателей 1 и 2, пройдя через оптический фильтр 8, отрезающий спектральные составляющие падающего излучения, не соответствующие спектральному диапазону излучателей, и объектив 9, формирует в плоскости изображения объектива 9 распределение облученности в виде двух квазиточечных пятен рассеяния. Установленное в той же плоскости фотоприемное устройство 10, выполненное в виде матричного приемника излучения, преобразует оптический сигнал в электрический, который затем поступает на вход блока обработки электрических сигналов 11, где по сигналу от электронной вычислительной машины 12 производится захват видеокадра с изображениями излучателей 1 и 2, после чего в блоке обработки электрических сигналов 11 электрический сигнал преобразуется к цифровому виду, вычисляются горизонтальные и вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния. Алгоритм определения энергетического центра тяжести является наиболее простым и обеспечивает точность до 0,01 размера элемента матричного приемника. Процесс захвата видеокадра с вычислением координат энергетических центров тяжести повторяется несколько раз, после чего измеренные координаты усредняются по всем произведенным измерениям, что позволяет уменьшить среднеквадратичное отклонение случайной составляющей погрешности измерений в  раз, где N - количество проводимых измерений, а следовательно, повысить точность измерения. Усредненные значения координат энергетических центров тяжести пятен рассеяния пересылаются в электронную вычислительную машину 12, где вычисляются координаты середины отрезка между пятнами рассеяния по формулам:
раз, где N - количество проводимых измерений, а следовательно, повысить точность измерения. Усредненные значения координат энергетических центров тяжести пятен рассеяния пересылаются в электронную вычислительную машину 12, где вычисляются координаты середины отрезка между пятнами рассеяния по формулам:
 и
и 
где x′, y′ - координаты центра отрезка между пятнами рассеяния,
x1, х2 - горизонтальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно,
y1, y2 - вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно.
Величина смещения контролируемого объекта X, Y определяется из соотношения:
X=x′·M и Y=y′·M,
где  - масштабный коэффициент М, вычисляемый автоматически для каждой дистанции, В - длина базового отрезка в пространстве предметов, известная с большой точностью.
- масштабный коэффициент М, вычисляемый автоматически для каждой дистанции, В - длина базового отрезка в пространстве предметов, известная с большой точностью.
Помимо этого работа с цифровым электрическим сигналом позволяет вводить в алгоритм работы электронной вычислительной машины 12 алгоритмические поправки, компенсирующие влияние различных погрешностей, что значительно повышает точность измерения.
Необходимые для работы устройства напряжения питания вырабатываются блоком питания (на фигуре не показан).
Пример конкретного исполнения.
Излучатели выполнены в виде полупроводниковых излучающих диодов, закрепленных на плоском держателе, имеющем необходимые крепления для удержания его на контролируемом объекте. Блок управления излучателями выполнен единой платой с размещенным на ней микроконтроллером и двумя каналами управления излучателями, каждый из которых состоит из инвертора и усилителя, выполняющих широтно-импульсную модуляцию. Спектральная полоса пропускания оптического фильтра приемной системы согласована со спектральной характеристикой полупроводниковых излучающих диодов. В качестве объектива используется телеобъектив с внутренней фокусировкой, который позволяет сохранять положение плоскости резкого изображения и сохранить прямолинейность базовой линии системы при перефокусировке на разноудаленные дистанции. Фотоприемное устройство выполнено в виде ПЗС матрицы, причем центр матрицы назначается в процессе калибровки программно. Это значительно упрощает процесс калибровки, юстировки и освобождает от необходимости точных механизмов юстировки матрицы. Блок обработки электрических сигналов выполнен единой платой, с установленными на ней аналогово-цифровым преобразователем, оперативным запоминающим устройством, платой формирователя адреса и микроконтроллером, выполняющим согласование работы вышеперечисленных компонентов блока обработки электрических сигналов и необходимые вычисления. Электронная вычислительная машина выполнена в виде персонального компьютера.
Таким образом, заявляемый способ измерения линейного смещения объекта и устройство для его осуществления обеспечивает сохранение точности измерения при упрощении требований к характеристикам и параметрам излучателя (равнояркость излучающей поверхности), формируемого изображения (равномерность освещенности) и других функциональных узлов, влекущем за собой снижение требований к качеству исполнения отдельных узлов системы, увеличение степени их взаимозаменяемости, универсализацию работы устройства, снижение требований к точности установки частей системы и связанное с этим упрощение настройки и эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА | 2014 |
|
RU2567735C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ОБЪЕКТАМИ | 2015 |
|
RU2596607C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2017 |
|
RU2662256C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252395C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2492420C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
Изобретение относится к контрольно-измерительной технике. Способ включает формирование облученности в виде квазиточечных пятен рассеяния в плоскости изображения двух излучателей, преобразование оптического сигнала в электрический, измерение координат пятен рассеяния и определение величины смещения. Оптический сигнал в электрический преобразуют посредством ПЗС матрицы, центр которой назначается программно. По значениям координат энергетических центров тяжести первого и второго пятен рассеяния определяют координаты середины отрезка между ними по формулам:  и
и  , где x′, y′ - координаты центра отрезка между пятнами рассеяния, x1, x2 - горизонтальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно, y1, y2 - вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно. Величину смещения контролируемого объекта X, Y определяют из соотношения: X=x′·М и Y=y′·М, где
, где x′, y′ - координаты центра отрезка между пятнами рассеяния, x1, x2 - горизонтальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно, y1, y2 - вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно. Величину смещения контролируемого объекта X, Y определяют из соотношения: X=x′·М и Y=y′·М, где  - масштабный коэффициент, В - длина базового отрезка в пространстве предметов. Технический результат заключается в обеспечении снижения требований к качеству исполнения отдельных узлов системы, увеличении степени их взаимозаменяемости, универсализации работы устройства, снижении требований к точности установки частей системы и упрощении настройки и эксплуатации. 2 н.п. ф-лы, 1 ил.
- масштабный коэффициент, В - длина базового отрезка в пространстве предметов. Технический результат заключается в обеспечении снижения требований к качеству исполнения отдельных узлов системы, увеличении степени их взаимозаменяемости, универсализации работы устройства, снижении требований к точности установки частей системы и упрощении настройки и эксплуатации. 2 н.п. ф-лы, 1 ил.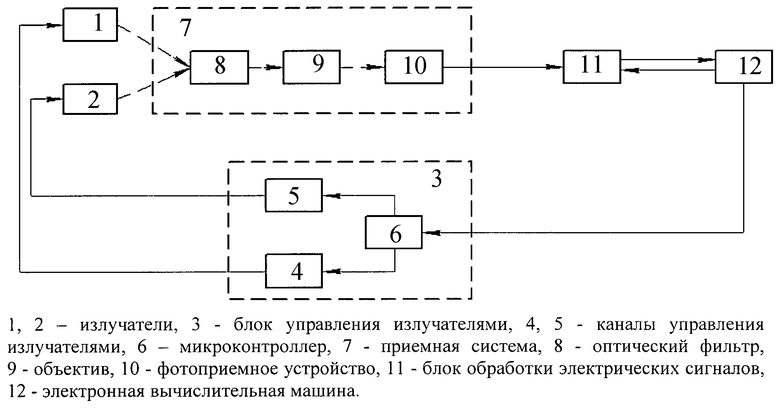
1. Способ измерения линейного смещения объекта, включающий формирование облученности в виде квазиточечных пятен рассеяния в плоскости изображения двух излучателей, преобразование оптического сигнала в электрический, измерение координат пятен рассеяния и определение величины смещения, отличающийся тем, что оптический сигнал в электрический преобразуют посредством ПЗС-матрицы, центр которой назначается программно, по значениям координат энергетических центров тяжести первого и второго пятен рассеяния определяют координаты середины отрезка между ними по формулам
 и
и 
где x′, y′ - координаты центра отрезка между пятнами рассеяния, x1, x2 - горизонтальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно, y1, y2 - вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно, а величину смещения контролируемого объекта X, Y определяют из соотношения
X=x′·М и Y=y′·М,
где  - масштабный коэффициент, В - длина базового отрезка в пространстве предметов.
- масштабный коэффициент, В - длина базового отрезка в пространстве предметов.
2. Устройство для измерения линейного смещения объекта, включающее предназначенные для размещения на контролируемом объекте два точечных излучателя, расположенных в одной плоскости на фиксированном расстоянии друг от друга, приемную систему, оптически сопряженную с излучателями, содержащую объектив и фотоприемное устройство, установленное в плоскости изображения объектива и выполненное в виде матричного фотоприемника, соединенного с блоком обработки, а также блок управления излучателями, содержащий два канала управления излучателями и микроконтроллер, выходы которого соединены с входами каждого из каналов управления излучателями, а вход микроконтроллера соединен с блоком обработки, при этом выходы каждого канала управления излучателями соединены с входами соответствующих излучателей, плоскость размещения которых параллельна фоточувствительной площадке фотоприемного устройства, отличающееся тем, что в качестве объектива используется телеобъектив с внутренней фокусировкой, а центр матрицы назначается программно.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 4193689 А, 18.03.1980 | |||
| Гидравлическая стойка двойной раздвижности | 1988 |
|
SU1555508A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ВНЕШНЕЙ СРЕДЫ ДЛЯ ПОСТРОЕНИЯ ЕЕ ТРЕХМЕРНОЙ МОДЕЛИ В СТЕРЕОТЕЛЕВИЗИОННОЙ СИСТЕМЕ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 1993 |
|
RU2065133C1 |

