Область техники, к которой относится изобретение
Изобретение относится к измерительной технике, в частности к устройствам для измерения активного сопротивления, и может быть использовано в средствах для измерения неэлектрических величин резистивными датчиками.
Уровень техники
Известно устройство для измерения неэлектрических величин емкостными датчиками, содержащее первый и второй генераторы, микроконтроллер и цифровой индикатор, во времязадающие цепи генераторов включены емкостные и резистивные элементы, один из дискретных выводов микроконтроллера подключен к входам разрешения генерирования обоих генераторов, цифровой индикатор подключен к микроконтроллеру. На выходе устройства формируется код, который зависит от изменения емкости и/или сопротивления времязадающих цепей генераторов (см. пат. РФ №2214610, кл. G01R 27/26).
Недостаток известного решения - низкая точность, обусловленная погрешностью, вносимой генераторами, параметры которых зависят от внешних факторов, например температуры.
Известно устройство - мостовая схема (мост Уитстона) для измерения сопротивления резистивных датчиков, содержащая два резистивных делителя, крайние выводы которых подключены к источнику питания, между средними выводами резистивных делителей включен измерительный прибор (см. Яковлев В. Структура измерительной системы на базе пассивных датчиков / В.Яковлев // Современные технологии автоматизации. - 2002, №1).
Недостаток известного решения - низкая точность, обусловленная нелинейностью характеристики преобразования.
Наиболее близким по технической сущности к заявляемому техническому решению и принятое авторами за прототип является микроконтроллерный измерительный преобразователь для резистивного датчика, содержащий микроконтроллер, RC-фильтр, первый, второй, третий и четвертый резисторы, причем первые выводы первого и второго резисторов подключены к входу RC-фильтра, выход которого подключен к первому входу аналогового компаратора (АК) микроконтроллера, первые выводы третьего и четвертого резисторов подключены ко второму входу АК микроконтроллера, второй вывод первого резистора подключен к выходу широтно-импульсного модулятора (ШИМ) микроконтроллера, вторые выводы второго и третьего резисторов подключены к минусовой клемме источника питания, первый вывод третьего резистора подключен к плюсовой клемме источника питания (см. пат. РФ №2449299, кл. G01R 27/26).
Недостаток известного решения - низкая точность, обусловленная нелинейностью характеристики преобразования.
Раскрытие изобретения
Технический результат, который может быть достигнут с помощью предлагаемого изобретения сводится к повышению точности.
Технический результат достигается тем, что в микроконтроллерный измерительный преобразователь с уравновешиванием резистивного моста, содержащий микроконтроллер, RC-фильтр, первый, второй, третий и четвертый резисторы, первые выводы первого и второго резисторов подключены к входу RC-фильтра, выход которого подключен к первому входу АК микроконтроллера, первые выводы третьего и четвертого резисторов подключены ко второму входу АК микроконтроллера, введен пятый резистор, причем первый вывод пятого резистора подключен к входу RC-фильтра, второй вывод пятого резистора подключен к выходу ШИМ микроконтроллера, вторые выводы первого, второго, третьего и четвертого резисторов подключены, соответственно к первому, второму, третьему и четвертому дискретным выходам микроконтроллера, в качестве второго резистора включен резистивный датчик.
Краткое описание чертежей
На чертеже представлена структурная схема микроконтроллерного измерительного преобразователя с уравновешиванием резистивного моста.
Осуществление изобретения
Микроконтроллерный измерительный преобразователь с уравновешиванием резистивного моста содержит (см. чертеж) первый резистор 1, второй резистор 2 (он же резистивный датчик), третий резистор 3, четвертый резистор 4, пятый резистор, RC-фильтр 6 и микроконтроллер 7. Резисторы 1, 2 и 5 первыми выводами подключены к входу RC-фильтра 6, выход которого подключен к первому входу АК (АК не показан) микроконтроллера 7, второй вывод резистора 5 подключен к выходу ШИМ (ШИМ не показан) микроконтроллера 7, первые выводы резисторов 3 и 4 подключены ко второму входу АК микроконтроллера 7, вторые выводы резисторов 1, 2, 3, и 4 подключены, соответственно, к первому, второму, третьему и четвертому дискретным выходам микроконтроллера 7.
Микроконтроллерный измерительный преобразователь с уравновешиванием резистивного моста работает следующим образом.
Выход ШИМ микроконтроллера 7 представляет собой ключ, построенный на полевых транзисторах. С помощью этого ключа ШИМ микроконтроллера 7 подключает второй вывод резистора 5 к внутренним, или к плюсовой клемме, или к минусовой клемме питания микроконтроллера 7. Таким образом, резистор 5 периодически подключается параллельно или к резистору 1, или к резистору 2. Среднее значение сопротивления параллельно включенных резисторов 1 и 5, а также резисторов 2 и 5 изменяется в зависимости от коэффициента заполнения G ШИМ, что позволяет программным способом уравновешивать мост, состоящий из резисторов 1, 2, 3 и 4 и таким образом повысить точность микроконтроллерного измерительного преобразователя.
К инвертирующему входу АК микроконтроллера 7 приложено опорное напряжение Ur, снимаемое с резистивного делителя 3, 4. К неинвертирующему входу АК микроконтроллера 7 приложено напряжение, формируемое на выходе RC-фильтра 6, среднее значение которого определяется: UМ=(UH-UL)·G+UL, где UH и UL - напряжения, соответственно, высокого и низкого уровней на входе RC-фильтра. Напряжение UH будет сформировано, когда резистор 5 будет подключен к плюсовой клемме питания микроконтроллера, напряжение UL будет сформировано, когда резистор 5 будет подключен к минусовой клемме питания микроконтроллера 7; G=tH/TM - коэффициент заполнения ШИМ-сигнала; ТM=tH+tL - период ШИМ-сигнала; tH и tL - соответственно, длительности высокого и низкого логических уровней ШИМ-сигнала.
Микроконтроллер 7 непрерывно следит за напряжением UM. Если это напряжение станет меньше опорного напряжения Ur, то на выходе АК формируется логический ноль, по этому событию микроконтроллер 7 увеличивает на единицу коэффициент заполнения G и проверяет выход АК. Как только напряжение UM станет больше опорного напряжения Ur микроконтроллер 7 уменьшает коэффициент заполнения G. Таким образом, коэффициент заполнения G зависит от напряжения UM, формируемого на выходе RC-фильтра 6, которое, в свою очередь, зависит от сопротивления резистивного датчика 2, так как сопротивления резисторов 1, 3, 4 и 5 - величины постоянные, т.е. являются образцовыми. Результат преобразования - двоичный код, пропорциональный коэффициенту заполнения G, а следовательно, и сопротивлению резистора 2, формируется в регистре сравнения встроенным в микроконтроллер 7 таймером/счетчиком, работающим в режиме ШИМ.
Предлагаемое изобретение по сравнению с прототипом и другими известными решениями имеет преимущество: повышена точность преобразования методом программно-управляемого уравновешивания резистивного моста.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УРАВНОВЕШИВАНИЕМ РЕЗИСТИВНОГО МОСТА УИТСТОНА МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2012 |
|
RU2515309C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УПРАВЛЯЕМЫМ ПИТАНИЕМ РЕЗИСТИВНЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2014 |
|
RU2563315C1 |
| Микроконтроллерный измерительный преобразователь сопротивления резисторных датчиков в двоичный код с функцией самодиагностики | 2018 |
|
RU2690517C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ФОТОПЛЕТИЗМОГРАФИЧЕСКОГО ДАТЧИКА ПУЛЬСА | 2014 |
|
RU2583148C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СОПРОТИВЛЕНИЯ С УПРАВЛЯЕМОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2012 |
|
RU2491558C1 |
| Микроконтроллерный измерительный преобразователь для датчика Веннера | 2024 |
|
RU2837986C1 |
| Микроконтроллерный измерительный преобразователь для беспроводного мониторинга электрического сопротивления почвы с использованием метода Веннера | 2024 |
|
RU2823172C1 |
| Микроконтроллерное устройство измерения метеофакторов и вычисления эффективной температуры для цифровых систем управления микроклиматом | 2022 |
|
RU2799970C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ РЕЗИСТИВНОГО ДАТЧИКА | 2011 |
|
RU2449299C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2010 |
|
RU2444020C1 |
Изобретение относится к измерительной технике, в частности к устройствам для измерения активного сопротивления, и может быть использовано в средствах для измерения и контроля неэлектрических величин резистивными датчиками. Микроконтроллерный измерительный преобразователь с уравновешиванием резистивного моста содержит первый резистор 1, второй резистор 2 (он же резистивный датчик), третий резистор 3, четвертый резистор 4, пятый резистор, RC-фильтр 6 и микроконтроллер 7. Резисторы 1, 2 и 5 первыми выводами подключены к входу RC-фильтра 6, выход которого подключен к первому входу АК (АК не показан) микроконтроллера 7, второй вывод резистора 5 подключен к выходу ШИМ (ШИМ не показан) микроконтроллера 7, первые выводы резисторов 3 и 4 подключены ко второму входу АК микроконтроллера 7, вторые выводы резисторов 1, 2, 3, и 4 подключены, соответственно к первому, второму, третьему и четвертому дискретным выходам микроконтроллера 7. Технический результат заключается в повышении точности микроконтроллерного измерительного преобразователя. 1 з.п. ф-лы, 1 ил.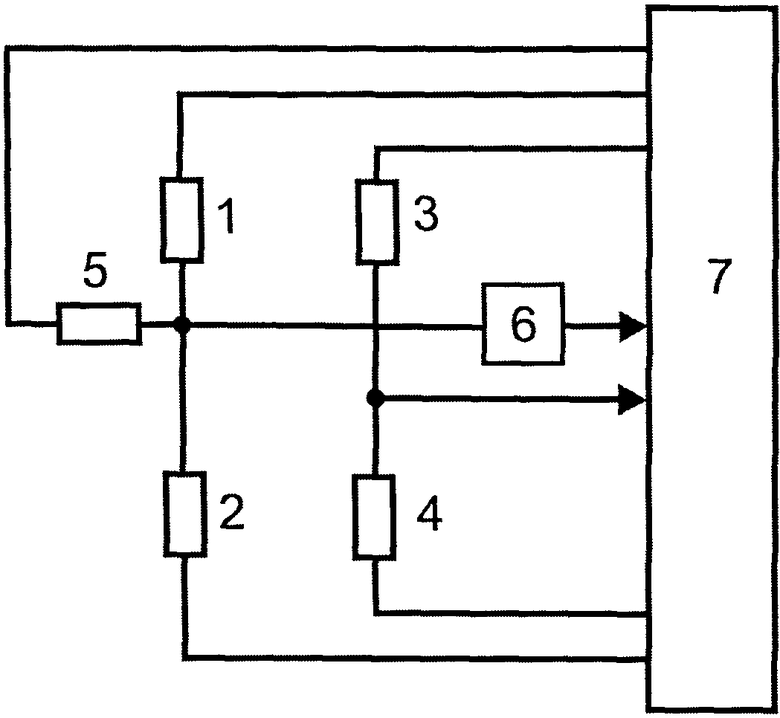
1. Микроконтроллерный измерительный преобразователь с уравновешиванием резистивного моста, содержащий микроконтроллер, RC-фильтр, первый, второй, третий и четвертый резисторы, первые выводы первого и второго резисторов подключены к входу RC-фильтра, выход которого подключен к первому входу аналогового компаратора микроконтроллера, первые выводы третьего и четвертого резисторов подключены ко второму входу аналогового компаратора микроконтроллера, отличающийся тем, что в него введен пятый резистор, причем первый вывод пятого резистора подключен к входу RC-фильтра, второй вывод пятого резистора подключен к выходу широтно-импульсного модулятора микроконтроллера, вторые выводы первого, второго, третьего и четвертого резисторов подключены, соответственно, к первому, второму, третьему и четвертому дискретным выходам микроконтроллера.
2. Микроконтроллерный измерительный преобразователь для резистивного датчика с уравновешиванием моста по п.1, отличающийся тем, что в качестве второго резистора включен резистивный датчик.
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ РЕЗИСТИВНОГО ДАТЧИКА | 2011 |
|
RU2449299C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2009 |
|
RU2391677C1 |
| ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ, ЯВЛЯЮЩИЙСЯ ЭКВИВАЛЕНТОМ ОБРАЗЦОВОГО РЕЗИСТОРА, И СПОСОБ, РЕАЛИЗУЕМЫЙ В НЕМ | 2007 |
|
RU2372592C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2031518C1 |

