Область техники, к которой относится изобретение
Изобретение относится к измерительной технике, в частности, к устройствам для измерения активного сопротивления и может быть использовано в средствах для измерения неэлектрических величин резистивными датчиками.
Уровень техники
Известно устройство - микроконтроллерный измерительный преобразователь для резистивного датчика, содержащий микроконтроллер, интегрирующее звено (RC-фильтр), первый, второй третий и четвертый резисторы, причем, первые выводы второго и третьего резисторов подключены к минусовой клемме источника питания микроконтроллера, первый вывод первого резистора подключен к выходу широтно-импульсного модулятора (ШИМ) микроконтроллера, первый вывод третьего резистора подключен к плюсовой клемме источника питания микроконтроллера, вторые выводы первого и второго резисторов подключены ко входу RC-фильтра, выход которого подключен к первому входу аналогового компаратора (АК) микроконтроллера, ко второму входу АК микроконтроллера подключены вторые выводы третьего и четвертого резисторов, в качестве второго резистора включен резистивный датчик (см. пат. РФ №2449299, кл. G01R 27/26).
Недостаток известного решения - низкая точность, обусловленная влиянием температуры на выходное сопротивление широтно-импульсного модулятора микроконтроллера.
Известно устройство - микроконтроллерный измерительный преобразователь с уравновешиванием резистивного моста Уитстона методом широтно-импульсной модуляции, содержащий микроконтроллер, RC-фильтр, первый, второй, третий и четвертый резисторы, первые выводы первого и второго резисторов подключены к входу RC-фильтра, выход которого подключен к первому входу аналогового компаратора микроконтроллера, первые выводы третьего и четвертого резисторов подключены ко второму входу аналогового компаратора микроконтроллера, пятый и шестой резисторы, причем первый вывод пятого резистора подключен ко второму выводу второго резистора и к первому выводу шестого резистора, второй вывод пятого резистора подключен к выходу широтно-импульсного модулятора микроконтроллера, вторые выводы первого, третьего, четвертого и шестого резисторов подключены соответственно к первому, второму, третьему и четвертому дискретным выходам микроконтроллера, в качестве второго резистора включен резистивный датчик (см. пат. РФ №2515309, кл. G01R 27/26).
Недостаток известного решения - низкая точность, обусловленная влиянием температуры на выходное сопротивление широтно-импульсного модулятора микроконтроллера.
Наиболее близким по технической сущности к заявляемому техническому решению и принятое авторами за прототип является устройство - микроконтроллерный измерительный преобразователь с управляемым питанием резистивных измерительных цепей методом широтно-импульсной модуляции, содержащий микроконтроллер, первый RC-фильтр, первый, второй третий и четвертый резисторы, причем первый вывод первого резистора подключен к выходу первого широтно-импульсного модулятора микроконтроллера, вторые выводы первого и второго резисторов подключены к входу первого RC-фильтра, выход которого подключен к первому входу аналогового компаратора микроконтроллера, второй RC-фильтр, причем, первые выводы второго, третьего и четвертого резисторов подключены к выходам, соответственно, второго, третьего и четвертого широтно-импульсных модуляторов микроконтроллера, вторые выводы третьего и четвертого резисторов подключены ко входу второго RC-фильтра, выход которого подключен ко второму входу аналогового компаратора микроконтроллера, в качестве одного из четырех резисторов включен резистивный датчик (см. пат. РФ №2563315, кл. G01R 27/02).
Недостаток известного решения - низкая точность: данное устройство не способно выполнять коррекцию результата преобразования, которая необходима для учета изменения параметров элементов измерительной и опорной резистивных цепей, вызванное, например, их старением или влиянием температуры.
Раскрытие изобретения
Задачей предлагаемого изобретения является повышение точности преобразования сопротивления резистивных датчиков в двоичный код.
Технический результат достигается тем, что в микроконтроллерный измерительный преобразователь сопротивления резистивных датчиков в двоичный код с функцией самодиагностики, содержащий микроконтроллер, первый и второй RC-фильтры, первый, второй, третий и четвертый резисторы, причем первые выводы первого, второго, третьего и четвертого резисторов подключены к выходам, соответственно, первого, второго, третьего и четвертого широтно-импульсных модуляторов микроконтроллера, вторые выводы первого и второго резисторов подключены к входу первого RC-фильтра, выход которого подключен к первому входу аналогового компаратора микроконтроллера, вторые выводы третьего и четвертого резисторов подключены к входу второго RC-фильтра, выход которого подключен ко второму входу аналогового компаратора микроконтроллера, дополнительно введен пятый резистор причем, первый вывод пятого резистора подключен к выходу пятого широтно-импульсного модулятора микроконтроллера, второй вывод пятого резистора подключен к входу первого RC-фильтра, в качестве одного из пяти резисторов включен резистивный датчик.
Краткое описание чертежей
На чертеже представлена структурная схема микроконтроллерного измерительного преобразователя сопротивления резистивных датчиков в двоичный код с функцией самодиагностики.
Осуществление изобретения
Микроконтроллерный измерительный преобразователь сопротивления резистивных датчиков в двоичный код с функцией самодиагностики содержит (фиг.) первый резистор 1 (он же резистивный датчик), второй резистор 2, третий резистор 3, четвертый резистор 4, первый RC-фильтр 5, второй RC-фильтр 6, микроконтроллер 7 и пятый резистор 8. Резисторы 2, 3, 4 и 8 - образцовые и в общем случае их сопротивления должны быть равны.
Резисторы 1, 2, 3, 4 и 8 первыми выводами подключены к выходам, соответственно, первого, второго, третьего, четвертого и пятого ШИМов микроконтроллера 7 (ШИМы на фиг. не показаны). Резисторы 1, 2 и 8, вторыми выводами подключены ко входу первого RC-фильтра 5, выход которого подключен к первому входу аналогового компаратора (АК) микроконтроллера 7 (АК на фиг. не показан), резисторы 3 и 4, вторыми выводами подключены ко входу второго RC-фильтра 6, выход которого подключен ко второму входу АК микроконтроллера 7.
Микроконтроллерный измерительный преобразователь (МИЛ) сопротивления резистивных датчиков в двоичный код с функцией самодиагностики работает следующим образом.
Микроконтроллер 7 настраивает выход пятого ШИМ в высокоомное состояние, при этом резистор 8 не оказывает влияния на процесс преобразования.
Микроконтроллер 7 формирует на выходе четвертого ШИМ низкий логический уровень напряжения (лог. 0), а на выходе третьего ШИМ формирует широтно-импульсно модулированный сигнал (ШИМ-сигнал), коэффициент заполнения которого подобран таким образом, чтобы среднее значение напряжения приложенного к цепи, состоящей из резистора 3 и резистора 4 обеспечивало бы протекание среднего значения тока через эту цепь не превышающего предельного значения измерительного тока через резистор 1, т.е. резистивный датчик. Пульсирующее напряжение в точке соединения вторых выводов резисторов 3 и 4 сглаживается RC-фильтром 6 и подается в форме среднего значения напряжения U2 на второй вход АК микроконтроллера 7. Напряжение U2 является в данном случае опорным напряжением.
Микроконтроллер 7 формирует на выходе второго ШИМ низкий логический уровень напряжения (лог. 0), а на выходе первого ШИМ формирует ШИМ-сигнал, коэффициент заполнения которого подбирается в зависимости от предельного значения измерительного тока через резистор 1 (резистивный датчик) и его сопротивления. Пульсирующее напряжение в точке соединения вторых выводов резисторов 1 и 2 сглаживается RC-фильтром 5 и подается в форме среднего значения напряжения U1 на первый вход АК микроконтроллера 7.
Допустим сопротивление резистора 1 (датчика) возросло, при этом, уменьшится напряжение U1. Если напряжение U1 станет меньше напряжения U2, то на выходе АК микроконтроллера 7 логический уровень поменяется на противоположный и микроконтроллер 7 начнет увеличивать коэффициент заполнения первого ШИМ до тех пор, пока напряжение U1 не станет больше напряжения U2, при котором логический уровень на выходе АК изменится на противоположный. Коэффициент заполнения первого ШИМ является функционально зависимой величиной от U1, которое в свою очередь зависит от сопротивления резистора 1.
Таким образом, микроконтроллер 7 следит за рассогласованием напряжений U1 и U2, и путем изменения коэффициента заполнения первого ШИМ уравновешивает резистивный мост, образуемый резисторами 1, 2, 3 и 4. Благодаря уравновешиванию резистивного моста достигается высокая линейность и, следовательно, точность преобразования.
Для реализации функции самодиагностики микроконтроллер 7 настраивает выход первого ШИМ в высокоомное состояние, при этом резистор 1 не оказывает влияния на процесс преобразования. Затем микроконтроллер 7 подключает выход пятого ШИМ к резистору 8 и выполняет несколько операций по уравновешиванию резистивного моста путем изменения коэффициента ШИМ-сигнала, формируемого пятым ШИМом. По значению коэффициента заполнения пятого ШИМ микроконтроллер 7 определяет степень отклонения заданных начальных параметров МИП от текущих и принимает одно из двух решений: или выполнять корректировку дальнейших результатов преобразований, или сформировать аварийный сигнал о неисправности МИП. Выбор одного из двух решений зависит от степени отклонения заданных начальных параметров МИП от текущих. Так как пятый резистор 8 является образцовым и, в общем случае, равен значению сопротивления каждого из остальных трех образцовых резисторов, то при равенстве коэффициентов заполнения третьего и пятого ШИМов напряжения U1 и U2 должно быть близкими по значению.
Дальнейшее повышение точности может быть достигнуто путем изменения алгоритма преобразования, например, первый ШИМ формирует на своем выходе лог. 0, а второй ШИМ формирует ШИМ-сигнал и процесс преобразования реализуется по ранее приведенному алгоритму. Результаты преобразований, выполненные по обоим алгоритмам, усредняются путем деления их суммы на два. Благодаря изменению логических уровней первого и второго ШИМ, а также третьего и четвертого ШИМ на противоположные, удается избежать дополнительных погрешностей вносимых, например, разностью потенциалов, возникающей в местах контакта аппаратных элементов измерительных цепей.
Предлагаемое изобретение по сравнению с прототипом и другими известными решениями имеет преимущество: повышена точность преобразования, за счет усовершенствования аппаратного обеспечения путем введения пятого резистора, подключенного соответствующим образом к пятому ШИМу микроконтроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УРАВНОВЕШИВАНИЕМ РЕЗИСТИВНОГО МОСТА УИТСТОНА МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2012 |
|
RU2515309C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УПРАВЛЯЕМЫМ ПИТАНИЕМ РЕЗИСТИВНЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2014 |
|
RU2563315C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УРАВНОВЕШИВАНИЕМ РЕЗИСТИВНОГО МОСТА | 2012 |
|
RU2506599C1 |
| Микроконтроллерный измерительный преобразователь для датчика Веннера | 2024 |
|
RU2837986C1 |
| Микроконтроллерный измерительный преобразователь для беспроводного мониторинга электрического сопротивления почвы с использованием метода Веннера | 2024 |
|
RU2823172C1 |
| Микроконтроллерное устройство измерения метеофакторов и вычисления эффективной температуры для цифровых систем управления микроклиматом | 2022 |
|
RU2799970C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ФОТОПЛЕТИЗМОГРАФИЧЕСКОГО ДАТЧИКА ПУЛЬСА | 2014 |
|
RU2583148C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ РЕЗИСТИВНЫХ И ЕМКОСТНЫХ ДАТЧИКОВ С ПЕРЕДАЧЕЙ РЕЗУЛЬТАТА ПРЕОБРАЗОВАНИЯ ПО РАДИОКАНАЛУ | 2015 |
|
RU2603937C1 |
| Многоканальный микроконтроллерный измерительный преобразователь для беспроводных емкостных датчиков | 2023 |
|
RU2821720C1 |
| Микроконтроллерное устройство измерения емкости для систем контроля и управления | 2019 |
|
RU2719790C1 |
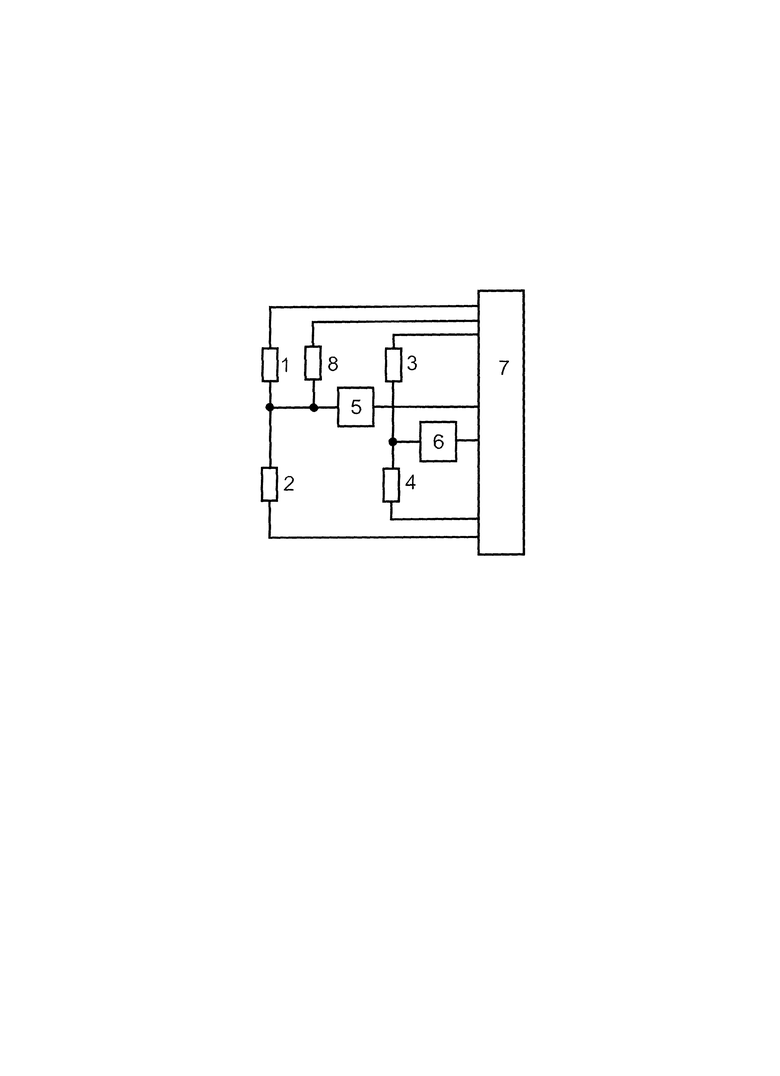
Изобретение относится к измерительной технике, в частности к устройствам для измерения активного сопротивления, и может быть использовано в средствах для измерения неэлектрических величин резистивными датчиками. Микроконтроллерный измерительный преобразователь сопротивления резистивных датчиков в двоичный код с функцией самодиагностики содержит первый резистор 1 (он же резистивный датчик), второй резистор 2, третий резистор 3, четвертый резистор 4, первый RC-фильтр 5, второй RC-фильтр 6, микроконтроллер 7 и пятый резистор 8. Резисторы 2, 3, 4 и 8 - образцовые, и в общем случае их сопротивления должны быть равны. Резисторы 1, 2, 3, 4 и 8 первыми выводами подключены к выходам соответственно первого, второго, третьего, четвертого и пятого ШИМов микроконтроллера 7 (ШИМы не показаны). Резисторы 1, 2 и 8 вторыми выводами подключены к входу первого RC-фильтра 5, выход которого подключен к первому входу аналогового компаратора (АК) микроконтроллера 7 (АК не показан), резисторы 3 и 4 вторыми выводами подключены к входу второго RC-фильтра 6, выход которого подключен к второму входу АК микроконтроллера 7. Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к повышению точности. 1 з.п. ф-лы, 1 ил.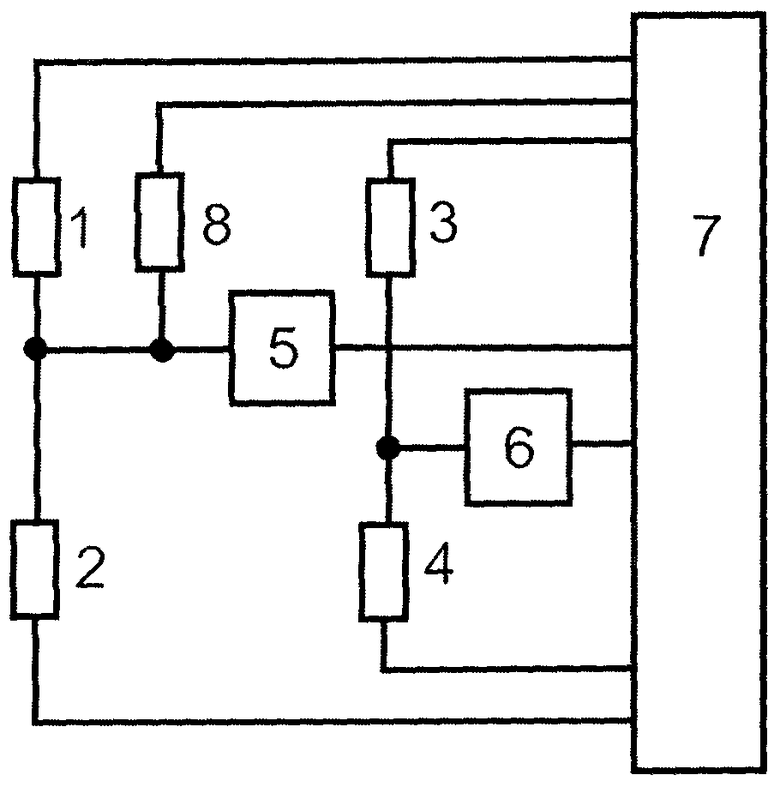
1. Микроконтроллерный измерительный преобразователь сопротивления резистивных датчиков в двоичный код с функцией самодиагностики, содержащий микроконтроллер, первый и второй RC-фильтры, первый, второй, третий и четвертый резисторы, причем первые выводы первого, второго, третьего и четвертого резисторов подключены к выходам соответственно первого, второго, третьего и четвертого широтно-импульсных модуляторов микроконтроллера, вторые выводы первого и второго резисторов подключены к входу первого RC-фильтра, выход которого подключен к первому входу аналогового компаратора микроконтроллера, вторые выводы третьего и четвертого резисторов подключены к входу второго RC-фильтра, выход которого подключен к второму входу аналогового компаратора микроконтроллера, отличающийся тем, что в него введен пятый резистор, причем первый вывод пятого резистора подключен к выходу пятого широтно-импульсного модулятора микроконтроллера, второй вывод пятого резистора подключен к входу первого RC-фильтра.
2. Микроконтроллерный измерительный преобразователь сопротивления резистивных датчиков в двоичный код с функцией самодиагностики по п. 1, отличающийся тем, что в качестве одного из пяти резисторов включен резистивный датчик.
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С УПРАВЛЯЕМЫМ ПИТАНИЕМ РЕЗИСТИВНЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ МЕТОДОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ | 2014 |
|
RU2563315C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД С ГЕНЕРАТОРОМ, УПРАВЛЯЕМЫМ НАПРЯЖЕНИЕМ | 2012 |
|
RU2502076C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2009 |
|
RU2391677C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2010 |
|
RU2444020C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2013 |
|
RU2546713C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2009 |
|
RU2391677C1 |
| Статья: "СНИЖЕНИЕ ЭНЕРГОПОТРЕБЛЕНИЯ И ПОВЫШЕНИЕ ЧУВСТВИТЕЛЬНОСТИ ИЗМЕРИТЕЛЬНОЙ ЦЕПИ РЕЗИСТИВНОГО МИКРОКОНТРОЛЛЕРНОГО ДАТЧИКА", 2011 | |||
| US 5854564 A1, 29.12.1998. | |||

