ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к эндоскопическим хирургическим инструментам, содержащим, но без ограничения, хирургические отрезные и сшивающие скобками аппараты, которые содержат одноразовые загрузочные модули, которые способны накладывать ряды скобок на ткань, при одновременном отрезании ткани между рядами скобок и, в частности, к усовершенствованиям, относящимся к упомянутым одноразовым загрузочным модулям.
УРОВЕНЬ ТЕХНИКИ
Эндоскопическим хирургическим инструментам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Поэтому выполнены важные разработки в области эндоскопических хирургических инструментов, которые пригодны для точного размещения дистального концевого эффектора в искомом операционном поле через канюлю или троакар. Такие дистальные концевые эффекторы (например, эндоскопический режущий инструмент (типа endocutter), захват, режущее приспособление, сшивающие скобками аппараты, приспособление для наложения скрепок, устройство доступа, устройство для доставки лекарства генной терапии к месту действия и энергетическое устройство, использующее ультразвук, высокую частоту (RF), лазер и т.д.) захватывают ткань множеством способов для получения диагностического или терапевтического результата.
Известные хирургические сшивающие скобками аппараты содержат концевой эффектор, который одновременного выполняет продольное рассечение в ткани и накладывает ряды скобок на противоположные стороны рассечения. Концевой эффектор содержит пару согласованно действующих зажимных элементов, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Один из зажимных элементов служит опорой для кассеты для скобок, которая содержит, по меньшей мере, два поперечно разнесенных ряда скобок. Другой зажимной элемент образует наковальню, содержащую скобкоформирующие углубления, совмещенные с рядами скобок в кассете. Инструмент обычно содержит множество возвратно-поступательно перемещающихся клиньев, которые, при приведении в движение в дистальном направлении, проходят сквозь отверстия в кассете для скобок и входят в контакт с поводками, служащими опорой для скобок, для выполнения выталкивания скобок к наковальне.
Хирургические сшивающие скобками аппараты одного из типов выполнены с возможностью работы с одноразовыми загрузочными модулями (DLU), которые конструктивно выполнены с возможностью выполнения функции опоры для помещаемых в них кассеты для скобок и ножевого узла. После того, как операция закончена, DLU целиком выбрасывают в отходы. Такие инструменты, которые предназначены для работы с DLU, созданы, чтобы обеспечивать преимущество применения «чистого» ножевого лезвия в каждом случае работы инструментом. Примеры таких хирургических сшивающих скобками аппаратов и DLU описаны в патенте США № 5865361, выданном Миллимэну с соавторами (Milliman et al.), описание которого целиком включено в настоящую заявку путем отсылки.
Однако, при использовании упомянутых, ранее известных одноразовых загрузочных модулей, врачу приходится непрерывно приводить в действие рукоятку с храповым механизмом для выталкивания скобок и разрезания ткани. Поэтому существует потребность в хирургическом сшивающем скобками аппарате, выполненном с возможностью применения с одноразовым загрузочным модулем, который приводится в действие электродвигателем, заключенном в одноразовом загрузочном модуле.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом различных вариантов осуществления настоящего изобретения предлагается одноразовый загрузочный модуль для прикрепления к хирургическому отрезному и сшивающему скобками аппарату. В различных вариантах осуществления одноразовый загрузочный модуль модель содержать держатель, который служит опорой для установленной в нем кассеты для скобок. Узел наковальни (упора) может быть соединен с возможностью перемещения с держателем для селективного перемещения между разомкнутым и сомкнутым положениями относительно кассеты для скобок. Узел привода аксиальной подачи может быть установлен в держатель так, что данный узел может перемещаться в дистальном направлении из исходного положения в конечное положение по держателю и кассете для скобок. Узел привода аксиальной подачи может быть также отведен в проксимальном направлении из конечного положения в исходное положение. Электродвигатель может быть установлен в держатель и выполнен с возможностью приведения в движение узла привода аксиальной подачи в дистальном и проксимальном направлениях. Батарейка может быть установлена в держатель и подсоединена к электродвигателю для подачи в него питания.
В соответствии с еще одним общим аспектом различных вариантов осуществления настоящего изобретения предлагается одноразовый загрузочный модуль для прикрепления к хирургическому отрезному и сшивающему скобками аппарату. В различных вариантах осуществления одноразовый загрузочный модуль содержит держатель, который служит опорой для установленной в него кассеты для скобок. С держателем может быть соединен с возможностью перемещения узел наковальни для селективного перемещения между разомкнутым и сомкнутым положениями относительно кассеты для скобок. С держателем может быть соединен корпус, выполненный для съемного рабочего присоединения к хирургическому отрезному и сшивающему скобками аппарату. Узел привода аксиальной подачи может быть установлен в держатель и корпус для перемещения в дистальном направлении из исходного положения в конечное положение по держателю и кассете для скобок. Узел привода аксиальной подачи может быть также отведен в проксимальном направлении из конечного положения в исходное положение. В держатель может быть установлен электродвигатель, выполненный с возможностью сопряжения с узлом привода аксиальной подачи, для приведения в движение узла привода аксиальной подачи в дистальном и проксимальном направлениях. Батарейка может быть установлена в держатель и соединена с электродвигателем для подачи в него питания. Батарейка допускает ее селективное перемещение между отсоединенным положением и подсоединенными положениями в ответ на движения, подводимые к ней участком хирургического сшивающего скобками аппарата.
В соответствии с другим общим аспектом различных вариантов осуществления настоящего изобретения предлагается хирургический отрезной и сшивающий скобками аппарат. В различных вариантах осуществления инструмент может содержать узел рукоятки, который служит допускающей работу опорой для установленного в нем узла привода, который выполнен с возможностью сообщения приводящих движений и отводящего движения. Участок подвижной рукоятки может быть установлен с возможностью функционирования на узле рукоятки и выполнен с возможностью сопряжения с системой привода так, чтобы манипулирование подвижной рукояткой вынуждало систему привода сообщать приводящие движения. Удлиненный корпус может выступать из узла рукоятки и иметь дистальный конец, который можно соединять с одноразовым загрузочным модулем. В различных вариантах осуществления одноразовый загрузочный модуль может содержать держатель, который содержит установленную в нем кассету для скобок. С держателем может быть соединен с возможностью перемещения узел наковальни для селективного перемещения между разомкнутым и сомкнутым положениями относительно кассеты для скобок. В держателе может быть установлен узел привода аксиальной подачи таким образом, что узел привода аксиальной подачи может перемещаться в дистальном направлении из исходного положения в конечное положение по держателю и кассете для скобок, а также в проксимальном направлении из конечного положения в исходное положение. В держатель может быть установлен электродвигатель и выполнен с возможностью сопряжения с узлом привода аксиальной подачи для приведения в движение узла привода аксиальной подачи в дистальном и проксимальном направлениях. В держатель может быть установлена батарейка и подсоединена к электродвигателю для подачи в него питания. Батарейка может быть выполнена для сопряжения с участком удлиненного корпуса для получения от него приводящих движений при манипулировании подвижной рукояткой.
Данные и другие задачи и преимущества настоящего изобретения должны стать очевидными из прилагаемых чертежей и их описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в настоящее описание и являются его составной частью, иллюстрируют варианты осуществления изобретения и, вместе с вышеприведенным общим описанием различных вариантов осуществления изобретения и нижеприведенным подробным описанием вариантов осуществления, служат для пояснения различных принципов настоящего изобретения.
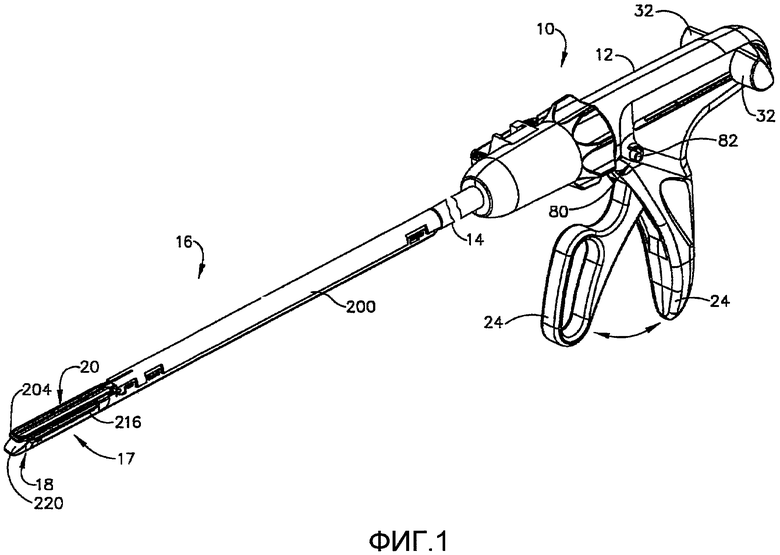
Фиг.1 - вид в перспективе варианта осуществления одноразового загрузочного модуля в соответствии с настоящим изобретением, соединенного с обычным хирургическим отрезным и сшивающим скобками аппаратом.
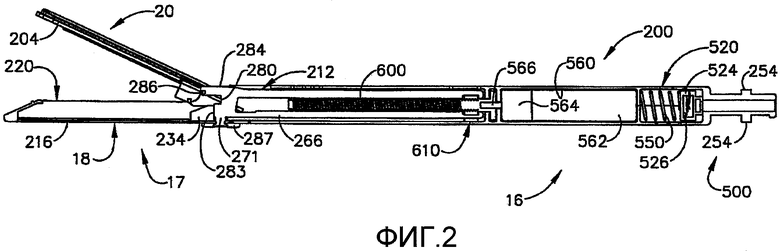
Фиг.2 - вид в разрезе одноразового загрузочного модуля, показанного на Фиг.1, с несколькими компонентами, показанными полностью для наглядности.
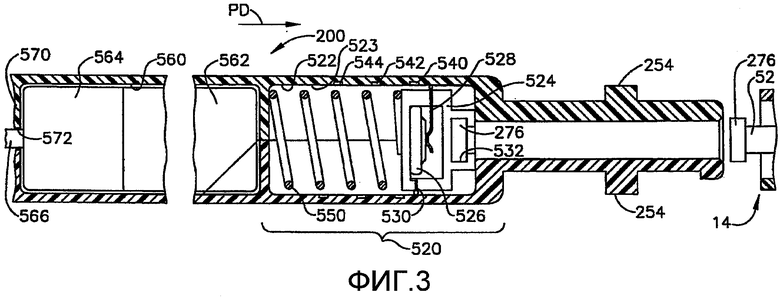
Фиг.3 - вид в разрезе проксимального конца одноразового загрузочного модуля в варианте осуществления, показанном на Фиг.1 и 2, с несколькими компонентами, показанными полностью для наглядности.
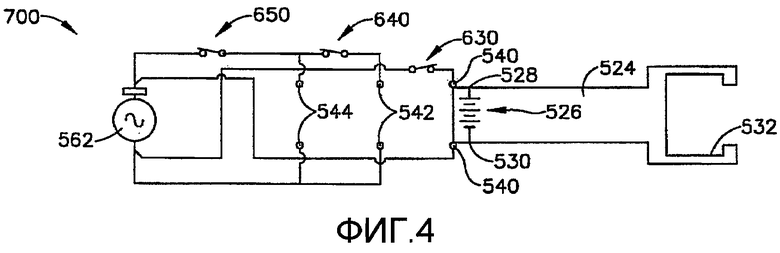
Фиг.4 - принципиальная схема варианта осуществления цепей одноразового загрузочного модуля, показанного на Фиг.1-3.
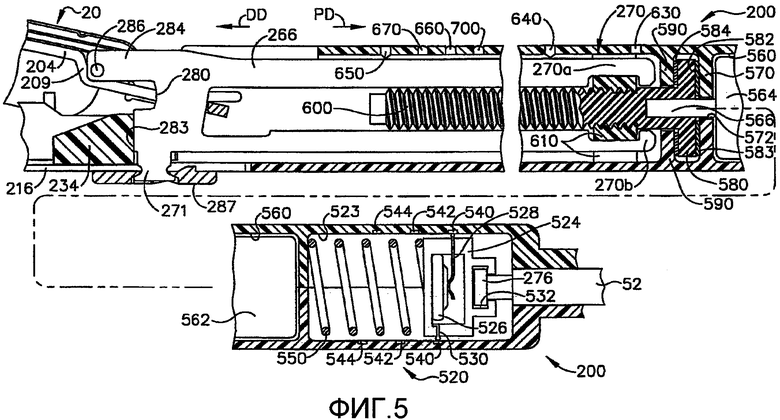
Фиг.5 - вид в разрезе одноразового загрузочного модуля, показанного на Фиг.1-3, когда одноразовый загрузочный модуль прикреплен к удлиненному корпусу хирургического инструмента.
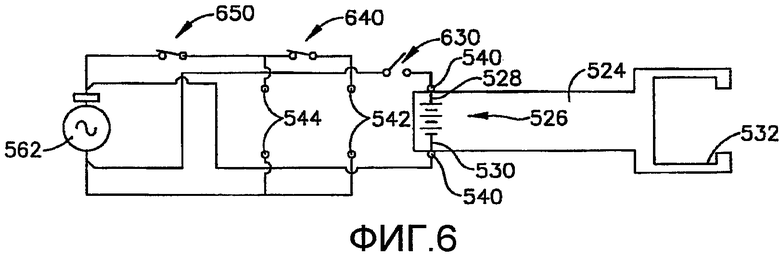
Фиг.6 - принципиальная схема цепей, с изображением положения различных компонентов одноразового загрузочного модуля после того, как он присоединен к хирургическому инструменту.
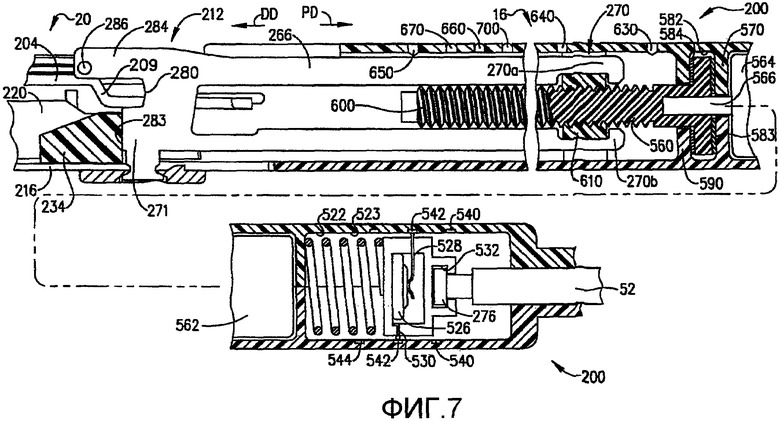
Фиг.7 - вид в разрезе одноразового загрузочного модуля, показанного на Фиг.1-6, когда приводная поперечина переведена в положение смыкания наковальни.
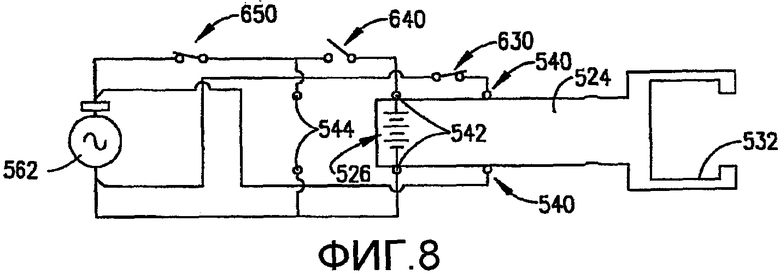
Фиг.8 - принципиальная схема цепей, с изображением положения различных компонентов одноразового загрузочного модуля после того, как приводная поперечина переведена в положение смыкания наковальни.
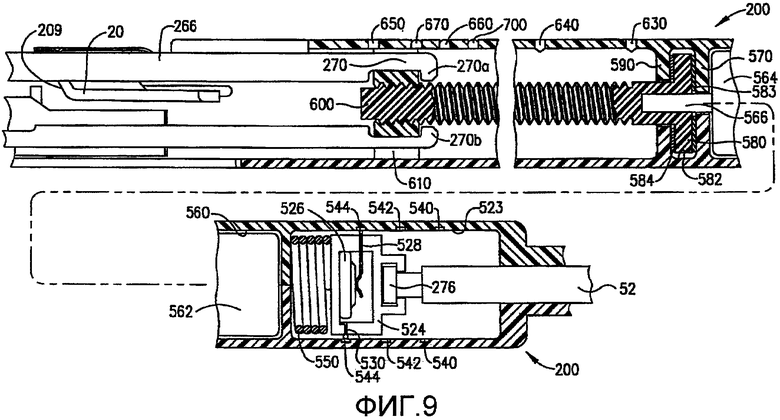
Фиг.9 - вид в разрезе одноразового загрузочного модуля, показанного на Фиг.1-8, когда приводная поперечина переведена в ее крайнее дистальное положение срабатывания.
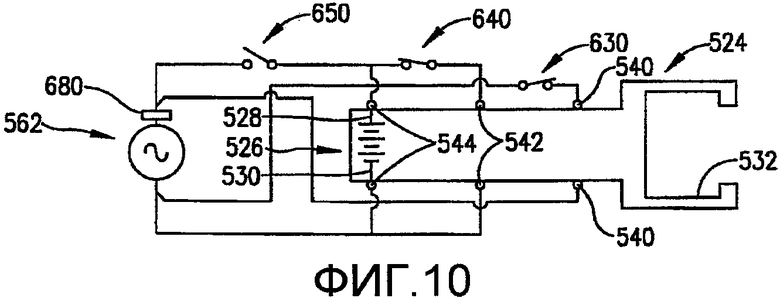
Фиг.10 - принципиальная схема цепей, с изображением положения различных компонентов одноразового загрузочного модуля после того, как приводная поперечина переведена в ее крайнее дистальное положение срабатывания.
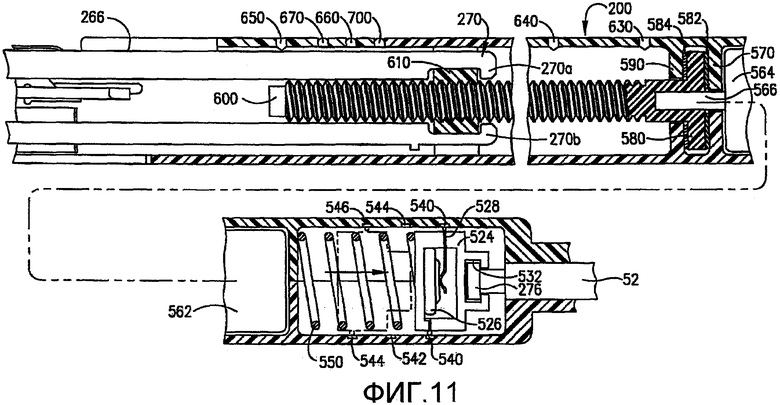
Фиг.11 - вид в разрезе одноразового загрузочного модуля, показанного на Фиг.1-10, когда приводная поперечина возвращается в ее исходное положение.
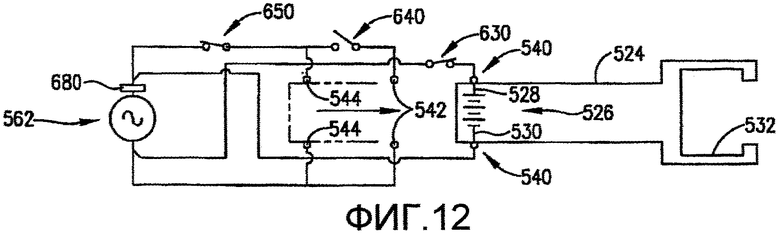
Фиг.12 - принципиальная схема цепей, с изображением положения различных компонентов одноразового загрузочного модуля, когда приводная поперечина возвращается в ее исходное положение.
ПОДРОБНОЕ ОПИСАНИЕ
Как видно из чертежей, на которых одинаковыми цифровыми позициями обозначены сходные компоненты на нескольких видах, на Фиг.1 изображен одноразовый загрузочный модуль 16 в соответствии с настоящим изобретением, который соединен с обычным хирургическим отрезным и сшивающим скобками аппаратом 10. Конструкция и общие принципы работы хирургического отрезного и сшивающего скобками аппарата 10 описаны в патенте США № 5865361, содержание которого включено в настоящую заявку путем отсылки. Поэтому, далее в настоящем подробном описании не рассматриваются различные компоненты аппарата 10 и порядок их работы сверх того, что необходимо для описания работы одноразового загрузочного модуля 16 в соответствии с настоящим изобретением.
Следует понимать, что далее в тексте настоящего подробного описания термины «проксимальный» и «дистальный» применяют для обозначения положения относительно захвата врачом узла 12 рукоятки хирургического сшивающего скобками аппарата 10, к которому присоединен одноразовый загрузочный модуль 16. Следовательно, одноразовый загрузочный модуль 16 является дистальным относительно более проксимального узла 12 рукоятки. Далее, следует понимать, что, для удобства и ясности, термины, обозначающие пространственное положение, например, «вертикальный», «горизонтальный», «вверх», «вниз», «правый» и «левый» использованы в настоящем описании применительно к чертежам. Однако, существует много пространственно-угловых положений применения хирургических инструментов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
Как можно видеть на Фиг.1, одноразовый загрузочный модуль 16 может, в общем, содержать инструментальный узел 17 для выполнения хирургических операций, например, разрезания ткани и наложения скобок с каждой стороны от разреза. Инструментальный узел 17 может содержать узел 18 кассеты, который содержит кассету 220 для скобок, которая установлена в держатель 216. Узел 20 наковальни может быть шарнирно соединен с держателем 216 известным способом для селективного поворотного перемещения между разомкнутым и сомкнутым положениями. Узел 20 наковальни содержит участок 204 наковальни, который содержит множество скобкоформирующих углублений (не показанных), сформированных в нижней поверхности упомянутого участка. Кассета 220 для скобок вмещает множество толкателей или поводков (не показанных), каждый из которых содержит установленную(ые) на нем скобку или скобки (не показанную(ые)). Приводящий блок 234 установлен в инструментальный узел 17 и выполнен с возможностью приведения в движение толкателей и скобок в кассете 220 для скобок в направлении к узлу 20 наковальни в то время, как приводящий блок 234 приводится в движение от проксимального конца инструментального узла 17 к дистальному концу 220. См. Фиг.2.
Одноразовый загрузочный модуль 16 может дополнительно содержать узел 212 привода аксиальной подачи, который содержит приводную поперечину 266, которая может быть изготовлена из одного листа материала или, предпочтительно, из нескольких сложенных листов. Однако, приводную поперечину 266 можно изготавливать из других подходящих форм материалов. Дистальный конец приводной поперечины 266 может содержать вертикальную опорную распорку 271, которая служит опорой для ножевого лезвия 280, и поверхность 283 примыкания, которая входит в зацепление с центральным участком приводящего блока 234 во время операции сшивания скобками. Ножевое лезвие 280 может располагаться, в общем, так, чтобы поступательно двигаться немного сзади приводящего блока 234 по центральному продольному пазу в кассете 220 для скобок, чтобы формировать разрез между рядами сшитой скобками ткани тела. Удерживающий выступ 284 может выступать в дистальном направлении от вертикальной опорной распорки 271 и служить опорой для кулачкового пальца или пальцев 286 на его дистальном конце. Кулачковый палец 286 может быть выполнен в размер и по конфигурации с возможностью зацепления с кулачковой поверхностью 209 на участке 204 наковальни для прижима участка 204 наковальни к ткани тела. См. Фиг.5 и 7. Кроме того, между проксимальным концом участка 204 наковальни и дистальным концевым участком корпуса 200 может быть обеспечена пластинчатая пружина (не показанная) для поджима узла 20 наковальни в нормально разомкнутое положение. Держатель 216 может также содержать удлиненную нижнюю прорезь, проходящую через него, сквозь которую продолжается участок вертикальной опорной распорки 271 для прикрепления к данному участку опорного элемента 287.
Как также можно видеть на Фиг.1, одноразовый загрузочный модуль 16 может также содержать корпусной участок 200, который выполнен с возможностью самофиксации или иного закрепления на держателе 216. Проксимальный конец 500 корпуса 200 может содержать выступы 254 сцепления для разъемного сцепления с удлиненным корпусом 14 хирургического сшивающего скобками аппарата. Выступы 254 формируют байонетное сочленение с дистальным концом участка удлиненного корпуса 14 хирургического сшивающего скобками аппарата, как описано в патенте США № 5865361.
Корпус 200 может дополнительно содержать участок 520 переключателя, который вмещает с возможностью перемещения батарейку 526. В частности, и, как показано на Фиг.3, участок 520 переключателя корпуса 200 ограничивает полость 522 батарейки, которая служит допускающей перемещение опорой для держателя 524 батарейки, который вмещает батарейку 526. Как можно видеть на Фиг.3, первый контакт 528 батарейки поддерживается в состоянии электрического контакта с батарейкой 526 и выступает сквозь держатель 524 батарейки для скользящего контакта с внутренней стенкой 523 полости 522 батарейки. Аналогично, второй контакт 530 батарейки установлен в состояние электрического контакта с батарейкой 526 и также выступает сквозь держатель 524 батарейки для скольжения по внутренней стенке 523 полости 522 батарейки. В держателе 524 батарейки имеется гнездо 532 для штока управления, выполненное с возможностью вмещения дистального конца 276 штока 52 управления, когда проксимальный конец одноразового загрузочного модуля 16 присоединяют к удлиненному корпусу 14 хирургического сшивающего скобками аппарата 10. Как также можно видеть на Фиг.3, в стенке 523 можно ориентировать ряд контактов 540, 542, 544 для прихода в контакт с контактами 528, 530 батарейки. Назначение контактов 540, 542, and 544 более подробно поясняется ниже. Как также можно видеть на Фиг.3, в полости 522 батарейки установлен поджимной элемент или пружина 550 переключателя для поджима держателя 524 батарейки в проксимальном направлении «PD», таким образом чтобы, когда одноразовый загрузочный модуль 16 не присоединен к удлиненному корпусу 14, держатель 524 батарейки поджимался в его крайнее проксимальное положение, показанное на Фиг.3. Во время удерживания в данном положении «до применения» или «отключения» посредством пружины 550, контакты 528 и 530 батарейки не контактируют ни с одним из контактов 540, 542, 544 в полости 522 батарейки, чтобы предотвратить разряд батарейки 526 в период неприменения.
Как также можно видеть на Фиг.3, в корпусе 200 может дополнительно содержаться полость 560 электродвигателя, которая вмещает электродвигатель 562 и редуктор 564. Редуктор 564 содержит выходной валик 566, который выступает через отверстие 572 в проксимальной перегородке 570, сформированной в корпусе 200. См. Фиг.5. Выходной валик 566 соединен шпонкой или иначе, но с исключением взаимного проворачивания, соединен с упорным диском 580. Как можно видеть на Фиг.5, упорный диск 580 установлен с возможностью вращения в полость 582 упорного диска между проксимальной перегородкой 570 и дистальной перегородкой 590, сформированной в корпусе 200. Кроме того, упорный диск 580 установлен с возможностью вращения между проксимальным упорным подшипником 583 и дистальным упорным подшипником 584, как показано на фигуре. Как также можно видеть на Фиг.5, упорный диск 580 может быть сформирован на проксимальном конце ходового винта 600, который находится в резьбовом зацеплении с ходовой гайкой 610, которая установлена внутри секции 270 сцепления, сформированной на дистальном конце приводной поперечины 266. В различных вариантах осуществления секция 270 сцепления может содержать пару пальцев 270a и 270b сцепления, которые выполнены в размер и по конфигурации для вмещения в пазы в ходовой гайке 610 для неповоротного присоединения ходовой гайки 610 к приводной поперечине 266. Таким образом, вращение ходового винта 600 в ходовой гайке 610 будет приводить в движение приводную поперечину 266 в дистальном направлении «DD» или в проксимальном направлении «PD», в зависимости от направления вращения ходового винта 600.
Одноразовый загрузочный модуль 16 может дополнительно содержать переключатель 630 обратного хода, который смонтирован в корпусе 200 и выполнен с возможностью срабатывания от ходовой гайки 610. Как также можно видеть на Фиг.5, переключатель 640 смонтирован в корпусе 200 и также ориентирован на срабатывание от ходовой гайки 610, чтобы указывать, когда произошло смыкание узла 20 наковальни. Переключатель 650 смонтирован в корпусе 200 и также ориентирован на срабатывание от ходовой гайки 610, чтобы указывать, что узел 212 привода аксиальной подачи переместился в конечное положение. Конкретные срабатывания переключателей 630, 640, 650 более подробно поясняются ниже.
На Фиг.4 изображен вариант осуществления схемы 700 в соответствии с настоящим изобретением, с изображением положений различных компонентов одноразового загрузочного модуля 16 в соответствии с настоящим изобретением в состоянии «до применения». Например, различные компоненты одноразового загрузочного модуля 16 могут быть в ориентации до применения, когда модуль 16 хранят или транспортируют. Как можно видеть на данной фигуре, при нахождении в данной ориентации, контакты 528 и 530 батарейки не контактируют ни с одним из контактов 540, 542, 544 в корпусе 200, что не дает батарейке 526 разрядиться в период неприменения.
На Фиг.5 и 6 показаны положения различных компонентов одноразового загрузочного модуля 16 после того, как он подсоединен к удлиненному корпусу 14 хирургического отрезного и сшивающего скобками аппарата 10. В частности, как можно видеть на Фиг.5, дистальный конец 276 штока 52 управления соединен с держателем 524 батарейки. Когда шток 52 управления соединяют с держателем 524 батарейки, держатель 524 батарейки перемещается в дистальном направлении «DD» против сопротивления пружины 550 так, что контакты 528, 530 батарейки приходят в контакт с контактами 540 обратного хода в корпусе 200. Кроме того, в данном положении, ходовая гайка 610 переключает переключатель 630 обратного хода в разомкнутое положение. Следует понимать, что переключатель 630 обратного хода является нормально замкнутым переключателем, который переключается в разомкнутое положение ходовой гайкой 610. Как показано на Фиг.6, когда переключатель 630 обратного хода разомкнут, электродвигатель 562 не получает питания.
На Фиг.7 и 8 показаны положения различных компонентов одноразового загрузочного модуля 16 после того, как врач привел в действие подвижную рукоятку 24 (как показано на Фиг.1) хирургического отрезного и сшивающего скобками аппарата 10. Как поясняется в патенте США № 5865361, когда подвижную рукоятку 24 первоначально перемещают к неподвижному элементу 22 рукоятки, шток 52 управления приводится в движение в дистальном направлении «DD». Как можно видеть на Фиг.7, когда шток 52 управления первоначально перемещается в дистальном направлении во время хода смыкания наковальни, держатель 524 батарейки перемещает батарейку 526 в положение, в котором контакты 528, 530 батарейки контактируют с контактами 542 смыкания наковальни. При этом, питание может подаваться из батарейки 526 в электродвигатель 562, который вращает ходовой винт 600 и вынуждает приводную поперечину 266 перемещаться в дистальном направлении. Когда приводная поперечина 266 перемещается в дистальном направлении «DD», кулачковый палец 286 входит в зацепление с кулачковым участком 209 участка 204 наковальни и вынуждает узел 20 наковальни поворачиваться в сомкнутое положение, как показано на Фиг.7. Когда приводная поперечина 266 перемещается в дистальном направлении в положение смыкания наковальни, ходовая гайка 610 выходит из контакта с переключателем 630 обратного хода, что позволяет переключателю обратного хода восстановить свое нормально разомкнутое положение. Затем ходовая гайка 610 воздействует на переключатель 640 смыкания наковальни и переводит его в разомкнутое положение. См. Фиг.8. В различных вариантах осуществления, в корпусе 200 может быть смонтирован, по меньшей мере, один светоиндикатор 660 смыкания наковальни для представления врачу визуальной индикации о том, что узел 20 наковальни переместился в сомкнутое положение.
Когда врач намеревается привести в действие инструмент 10 (т.е. привести в действие инструмент 10 для отрезания и сшивания скобками ткани), врач сначала нажимает стопорный штифт 82 узла 80 блокировки прошивки/отрезания (Фиг.1), как поясняется в патенте США № 5865361. После этого можно приводить в действие подвижную рукоятку 24. Когда нажимают на подвижную рукоятку 24, шток 52 управления перемещает держатель 524 батарейки и батарейку 526 в положение, показанное на Фиг.9 и 10. Как можно видеть на данных фигурах, когда батарейка 526 перемещается в данное положение, контакты 528, 530 батарейки приводятся в контакт с контактами 544 прошивки/отрезания. Переключатель 650 является нормально замкнутым, но не переключается ходовой гайкой 610. Следовательно, когда контакты 528, 530 батарейки приходят в контакт с контактами 544 прошивки/отрезания, питание поступает из батарейки 526 в электродвигатель 562, который приводит в движение ходовой винт 600. Когда ходовой винт 600 вращается, приводная поперечина 266 и ходовая гайка 610 приводятся в движение в дистальном направлении «DD» для подачи приводящего блока 234 по кассете 220 для скобок, чтобы осуществить выталкивание скобок и отрезание ткани. Как только приводная поперечина 266 достигает конца хода прошивки/отрезания (т.е. все скобки оказываются вытолкнутыми из кассеты 220 для скобок), ходовая гайка 610 устанавливается так, что воздействует на нормально замкнутый переключатель 650 и переводит его в разомкнутое положение (показанное на Фиг.10), в котором прекращается подача питания из батарейки 526 в электродвигатель 562. В различных вариантах осуществления дистальный светоиндикатор или светоиндикаторы 670 могут быть установлены на корпусе 200 для представления врачу индикации, что приводная поперечина 266 достигла ее крайнего дистального положения срабатывания.
Для отведения приводной поперечины 266, врач захватывает головки 32 отведения (показанные на Фиг.1) на узле 12 рукоятки и оттягивает их в проксимальном направлении «PD». Порядок работы и конструкция головок 32 отведения описаны в патенте США № 5865361. Как только врач переместит приводную поперечину 266 на достаточное расстояние в проксимальном направлении «PD», чтобы подвести батарейку к контактам 540 (Фиг.11), питание будет подаваться через переключатель 630 для реверса электродвигателя 562. Тогда ходовая гайка отпускает переключатель 650. После этого электродвигатель 562 приводит в движение приводную поперечину 266 в положение, дистальное относительно переключателя 630, который размыкается. Переключатель 630 обратного хода также находится в его нормально замкнутом положении и, тем самым, допускает подачу питания в электродвигатель 562 и вращение ходового винта 600 в противоположном направлении для приведения приводной поперечины 266 в движение в проксимальном направлении «PD». Как только ходовая гайка 610 воздействует на переключатель 630 обратного хода ножа, переключатель 630 обратного хода ножа переводится в разомкнутое положение и, тем самым, прекращает подачу питания из батарейки 526 в электродвигатель 562. В различных вариантах осуществления, в корпусе 200 может быть смонтирован светоиндикатор 700 исходного положения для обеспечения индикации, что приводная поперечина 266 находится в исходном положении.
На Фиг.11 и 12 показаны положения различных компонентов одноразового загрузочного модуля 16 в соответствии с настоящим изобретением, когда дистальный конец приводной поперечины 266 и лезвие 280 случайно застревают в течение хода прошивки/отрезания (т.е. когда лезвие 280 подается в дистальном направлении сквозь ткань, зажатую в инструментальном узле 17). Для правильной работы в данном случае можно обеспечить 680 ограничитель тока, показанный на Фиг.12. Ограничитель 680 тока служит для выключения электродвигателя 562, когда величина тока, который он отбирает, превышает предварительно заданный порог. Следует понимать, что величина тока, который отбирает электродвигатель 562 во время застревания, должна превысить величину тока, отбираемого в процессе нормального исполнения прошивки/отрезания. Как только ограничитель 680 тока останавливает электродвигатель 562, врач может отвести приводную поперечину 266 посредством захвата головок 32 отведения (показанных на Фиг.1) на узле 12 рукоятки и оттягивания их проксимальном направлении «PD», и электродвигатель 562 будет приводить ходовой винт 600 в движение в реверсном направлении, как пояснялось выше. Таким образом, ограничитель 680 тока, служит для останова электродвигателя 562, когда узел 212 привода аксиальной подачи сталкивается с сопротивлением, которое превышает предварительно заданное значение сопротивления, которое соответствует предварительно заданной максимальной величине тока, который электродвигатель 562 должен отбирать в нормальном режиме работы. Данная особенность также экономит мощность батарейки так, что приводную поперечину 266 можно отводить.
Следовательно, одноразовый загрузочный модуль 16 в соответствии с настоящим изобретением содержит одноразовый загрузочный модуль с автономным приводом от электродвигателя, который можно применять в сочетании с обычными хирургическими отрезными и сшивающими скобками инструментами, которые обычно требовали, чтобы врач вручную подавал и отводил узел привода и режущее лезвие присоединенного к данным инструментам одноразового загрузочного модуля. В различных вариантах осуществления одноразовый загрузочный модуль 16 может быть выполнен с возможностью облегчения автоматического отведения узла привода аксиальной подачи, если лезвие наталкивается на сопротивление предварительно заданной величины.
Выше описано несколько вариантов осуществления изобретения, однако, должно быть очевидно, что специалисты в данной области техники смогут создать различные модификации, изменения и доработки к данным вариантам осуществления с получением некоторых или всех преимуществ изобретения. Например, в соответствии с различными вариантами осуществления, для выполнения заданной функции или функций, единственный компонент можно заменять несколькими компонентами, и несколько компонентов можно заменять одним компонентом. Поэтому настоящая заявка предполагает охват всех подобных модификаций, изменений и доработок, не выходящих за пределы объема и сущности описанного изобретения, заданных прилагаемой формулой изобретения.
Любые патент, публикация или другие данные описания, в целом или частично, которые упомянуты как включенные в настоящее описание путем отсылки, включены в настоящее описание только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании. По существу, и в необходимых пределах, сведения, приведенные в явном виде в настоящем описании, заменяют собой любые противоречащие данные, включенные в настоящее описание путем отсылки. Любые данные, или их часть, которые упомянуты как включенные в настоящее описание путем отсылки, но которые противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании, будут включаться только в таких пределах, в которых не возникает противоречия между упомянутыми включенными данными и существующими данными изобретения.
Изобретение, которое предлагается для защиты, нельзя толковать как ограниченное конкретными описанными вариантами осуществления. Поэтому варианты осуществления следует считать наглядными, а не ограничивающими. Другими специалистами могут быть созданы варианты и внесены изменения, не выходящие за пределы сущности настоящего изобретения. Соответственно, прямо предполагается, что настоящим документом должны охватываться все подобные эквиваленты, варианты и изменения, которые находятся в пределах сущности и объема настоящего изобретения, определенных формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОРАЗОВЫЙ ЗАГРУЗОЧНЫЙ МОДУЛЬ ДЛЯ ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО СКОБКАМИ АППАРАТА | 2009 |
|
RU2492819C2 |
| ОДНОРАЗОВЫЙ ЗАГРУЗОЧНЫЙ МОДУЛЬ С ИНДИКАТОРОМ ПРОШИВКИ/ОТРЕЗАНИЯ | 2009 |
|
RU2489101C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| РАБОЧИЕ ОРГАНЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2497464C2 |
| ОДНОРАЗОВЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2492818C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ОТРЕЗНЫМ И СШИВАЮЩИМ ИНСТРУМЕНТОМ | 2009 |
|
RU2508910C2 |
Изобретение относится к медицине и может быть использовано в хирургии. Одноразовый загрузочный модуль содержит батарейку. Батарейка находится в отсоединенном положении, когда одноразовый загрузочный модуль не используют, и перемещается в соединенное положение, когда одноразовый загрузочный модуль присоединяют к хирургическому сшивающему аппарату, чтобы допускать селективное питание электродвигателя от батарейки. На одноразовом загрузочном модуле могут быть установлены индикаторы для индикации состояний, когда узел привода аксиальной подачи упомянутого модуля находится в исходном положении и конечном положении. Другой индикатор может быть предусмотрен для индикации состояния, когда узел наковальни находится в сомкнутом положении. 2 н. и 9 з.п. ф-лы, 12 ил.
1. Одноразовый загрузочный модуль для прикрепления к хирургическому отрезному и сшивающему скобками аппарату, при этом упомянутый одноразовый загрузочный модуль содержит:
держатель;
кассету для скобок, установленную в указанный держатель;
узел наковальни, соединенный с возможностью перемещения с указанным держателем для селективного перемещения между разомкнутым и сомкнутым положениями относительно кассеты для скобок;
узел привода аксиальной подачи, установленный в упомянутый держатель для перемещения в дистальном направлении из исходного положения в конечное положение по держателю и кассете для скобок и в проксимальном направлении из конечного положения в исходное положение;
электродвигатель, установленный в держателе и сопрягающийся с узлом привода аксиальной подачи, для приведения в движение узла привода аксиальной подачи в дистальном и проксимальном направлениях;
держатель батарейки, который установлен с возможностью перемещения в указанном держателе и способен присоединяться к штоку управления хирургического сшивающего скобками аппарата; и
батарейку, установленную в держатель батарейки, так что батарейка удерживается в отсоединенном положении до подсоединения одноразового загрузочного модуля к хирургическому сшивающему скобками аппарату и способна к перемещению в одно из подсоединенных положений после подсоединения одноразового загрузочного модуля к хирургическому сшивающему скобками аппарату.
2. Одноразовый загрузочный модуль по п.1, дополнительно содержащий индикатор, установленный на одноразовом загрузочном модуле для индикации состояния, когда узел привода аксиальной подачи находится в исходном положении.
3. Одноразовый загрузочный модуль по п.1, дополнительно содержащий индикатор, установленный на одноразовом загрузочном модуле для индикации состояния, когда узел наковальни находится в сомкнутом положении.
4. Одноразовый загрузочный модуль по п.1, дополнительно содержащий индикатор, на упомянутом одноразовом загрузочном модуле для индикации состояния, когда узел привода аксиальной подачи находится в крайнем дистальном положении.
5. Одноразовый загрузочный модуль по п.1, дополнительно содержащий средство для останова упомянутого электродвигателя, чтобы далее не приводить в движение узел привода в проксимальном направлении, когда узел привода аксиальной подачи сталкивается с сопротивлением, которое превосходит предварительно заданное значение сопротивления.
6. Одноразовый загрузочный модуль по п.5, в котором средство для останова электродвигателя содержит ограничитель тока, соединенный с возможностью функционирования с электродвигателем.
7. Хирургический отрезной и сшивающий скобками аппарат, содержащий:
узел рукоятки;
систему привода, установленную с возможностью функционирования в узле рукоятки и выполненную с возможностью сообщения приводящих движений и отводящего движения;
участок подвижной рукоятки, установленный с возможностью функционирования на узле рукоятки и сопрягающийся с системой привода так, чтобы манипулирование подвижной рукояткой вынуждало систему привода сообщать приводящие движения;
удлиненный корпус, выступающий из узла рукоятки и имеющий дистальный конец, соединяемый с одноразовым загрузочным модулем, при этом одноразовый загрузочный модуль содержит:
держатель;
кассету для скобок, установленную в держатель;
узел наковальни, соединенный с возможностью перемещения с держателем для селективного перемещения между разомкнутым и сомкнутым положениями относительно кассеты для скобок;
узел привода аксиальной подачи, установленный в держатель для перемещения в дистальном направлении из исходного положения в конечное положение по держателю и кассете для скобок и перемещения в проксимальном направлении из конечного положения в исходное положение;
электродвигатель, установленный в держатель и сопрягающийся с узлом привода аксиальной подачи, для приведения в движение узла привода аксиальной подачи в дистальном и проксимальном направлениях;
держатель батарейки, который установлен с возможностью перемещения в держатель и способен присоединяться к дистальному концу штока управления; и
батарейку, установленную в держатель батарейки, так что батарейка удерживается в отсоединенном положении до подсоединения одноразового загрузочного модуля к дистальному концу удлиненного корпуса хирургического сшивающего скобками аппарата и перемещается в одно из подсоединенных положений после подсоединения одноразового загрузочного модуля к дистальному концу удлиненного корпуса;
при этом батарейка сопрягается с участком удлиненного корпуса для получения от него приводящих движений при манипулировании подвижной рукояткой.
8. Хирургический отрезной и сшивающий скобками аппарат по п.7, в котором удлиненный корпус служит опорой для установки в нем штока управления, который сопрягается с системой привода.
9. Хирургический отрезной и сшивающий скобками аппарат по п.7, дополнительно содержащий средство для останова электродвигателя, когда узел привода аксиальной подачи сталкивается с сопротивлением, которое превосходит предварительно заданное значение сопротивления.
10. Хирургический отрезной и сшивающий скобками аппарат по п.7, дополнительно содержащий:
первый индикатор на одноразовом загрузочном модуле для индикации состояния, когда узел привода аксиальной подачи находится в исходном положении;
второй индикатор на одноразовом загрузочном модуле для индикации состояния, когда наковальня находится в сомкнутом положении; и
третий индикатор на одноразовом загрузочном модуле для индикации состояния, когда узел привода аксиальной подачи находится в конечном положении.
11. Хирургический отрезной и сшивающий скобками аппарат по п.10, в котором средство для останова электродвигателя содержит ограничитель тока, соединенный с возможностью функционирования с электродвигателем.
| Расходомер | 1991 |
|
SU1813201A3 |
| Сигнализатор уровня | 1991 |
|
SU1813202A3 |
| ЕР 1785102 А2, 16.05.2007 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Хирургический аппарат для наложения компрессионных швов | 1979 |
|
SU1022703A1 |
| Генератор импульсов | 1988 |
|
SU1621141A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ХИРУРГИЧЕСКИЙ СТЕПЛЕР ДЛЯ НАЛОЖЕНИЯ ЦИЛИНДРИЧЕСКОЙ СПИРАЛЕВИДНОЙ СКОБКИ | 2003 |
|
RU2244516C1 |
| DE 3212828 A1, 18.11.1982. | |||

