Указанные технические решения относятся к системам и средствам безопасности, которые разрешают или запрещают использование объектов промышленного и бытового назначения, являющимися источниками загрязнения воды, причем такие системы и средства функционально связаны со средствами отбора проб взятых из сливной воды, исходящей от объектов.
Технические решения предназначены для их использования в структурах управления объектов промышленного и бытового назначения, причем такие структуры управления ориентированы на автоматизацию процесса управления с целью уменьшения влияния человеческого фактора на принятие решения о запрете или разрешении работы объекта, являющегося источником сверх нормы загрязненных сточных вод.
Технические решения косвенно относятся к подготовке процессов обработки промышленных и бытовых сточных вод, при этом способ контроля и робот для осуществления способа относятся к средствам отбора и анализа проб сливной воды, они предназначены для использования в области получения и подготовки образцов исследования в жидком состоянии.
Помимо прямого назначения, разветвленная сеть сточных вод с точки зрения экологии представляет собой систему зараженных почв, подземных и наземных чистых вод сточными загрязненными водами, в которых содержатся вредные вещества, микроорганизмы, вирусы, бактерии, радионуклеиды, химические вредные соединения (загрязнители). Вода, насыщенная загрязнителями, является сточной загрязненной водой.
Вредные производства (объекты промышленного назначения), жилища людей (объекты бытового назначения), другие объекты жизнедеятельности, продуцирующие загрязнители, являются источниками заражения всей чистой земной воды. В этой связи очевидна назревшая техническая задача - замена существующей системы использования чистой воды для удаления загрязнителей на систему их там, где они возникли.
Предлагаются на первом этапе внедрения указанных решений использование системы контроля водоотводов от объектов промышленного и бытового назначения, которая предусматривает разрешение/запрещение деятельности объекта в случаях, когда предельно-допустимые концентрации загрязнителей являются фактически обнаружены и зарегестрированы, причем регистрация служит юридическим обоснованием запрещения доступа объекта к общему магистральному сливу воды, к которому подключены сливные трубы других объектов, а также к запрещению объекту пользоваться чистой водопроводной водой в целях слива загрязнителей. В таких случаях объект отключается от водопровода, водоотвод сливной воды перекрывается и работа объекта прекращается.
Патентные исследования, проведенные в отношении решения данных задач, показывают, что в РФ известна система автоматизированного контроля качества сточных вод, характеризующаяся тем, что она содержит насос, вентиль, смеситель, фильтр, блок пробоподготовки, проточную ячейку с блоком детекторов, выход которого соединен с входом устройства измерения концентрации, связанного интерфейсной магистралью с регистрирующим прибором, а также две входные гидромагистрали, подключенные соответственно к первому и третьему входам перистальтического насоса, три выходных гидромагистрали которого посредством последовательно соединенных смесителя и фильтра связаны с первым входом блока пробоподготовки, выход которого подключен к входу проточной ячейки. В эту систему введено устройство управления режимом работы и дополнительные входные гидромагистрали, три из которых являются входами многовходового управляемого вентиля, выход которого подключен к второму входу насоса, к четвертому входу которого подключена четвертая дополнительная входная гидромагистраль, четвертый выход насоса посредством гидромагистрали связан с вторым входом блока пробоподготовки, при этом информационный вход устройства управления режимом работы посредством интерфейсной магистрали связан с выходом устройства измерения концентрации, первый, второй и третий управляемые входы которого подключены соответственно к выходам "Калибровка", "Измерение" и "Детектор" устройства управления режимом работы, первый и второй выходы которого подключены соответственно к первому и второму управляемым входам многовходового управляемого вентиля, а управляемый вход насоса подключен к выходу "Детектор" устройства управления режимом работы. Данная система предусматривает реализацию в ней устройства управления режимом работы, которое выполнено на основе регистра, подключенного к схеме сравнения кодов, блока клавиатуры, двух элементов ИЛИ и дисплея, при этом информационные входы дисплея и схемы сравнения кодов подключены к входной интерфейсной магистрали, первый и второй выходы схемы сравнения кодов через первый и второй элементы ИЛИ подключены соответственно к первому и второму входам таймера, первый и второй выходы которого являются соответственно первым и вторым выходами устройства управления режимом работы, выход блока клавиатуры является выходом "Детектор" устройства управления режимом работы, выходы "Калибровка" и "Измерение" которого связаны через вторые входы первого и второго элементов ИЛИ соответственно с выходами "Калибровка" и "Измерение" блока клавиатуры (RU 4169 U1, 16.05.1997).
Известен также способ сбора данных экологического состояния региона и автоматизированная система аварийного и экологического мониторинга окружающей среды региона, причем система содержит стационарные и мобильные контрольные посты, оснащенные измерительной аппаратурой, регистраторы и анализаторы параметров среды, в частности, регистраторы сигналов гидрофизических полей, хемилюминесцентный, хроматографический, ионселективный, спектральный и радиометрический анализаторы, регистриратор сигналов акустического импеданса донных слоев, молекулярные спиновые детекторы взаимодействия протонов морской воды, регистраторы артефактов, обусловленные магнитогидродинамическим, биоэлектрическим и концентрационными эффектами, регистраторы синтетических ПАВ в водной среде, концентрации хлорофилла, микроорганизмов, фитопланктона, зоопланктона. В способе полученную информацию передают на устройства документирования и выполняют моделирование состояния региона. В процессе моделирования окружающую среду и инфраструктуру промышленного объекта разбивают на ряд объемов, для каждого из которых составляют модель материального баланса и прогнозную модель. Для реализации способа предложена система контроля, содержащая водозаборную линию с размещенными на ней датчиками гидрофизических полей, фильтровальную установку для концентрирования хлорофилла, фильтровальную установку с воронкой Зейтца для отбора проб микроорганизмов, камеру Ножотта для подсчета количества фитопланктона, камеру Богрова для подсчета количества зоопланктона, центрифугу для определения содержания хлорофилла, геофона, гидрофона, датчик спектрометра протонного спинового эха, при этом система содержит устройства для хемилюнесцентного, хроматографического, ионселективного, спектрального и радиометрического анализов, спектрометр ионизирующих излучений, атомно-абсорционный спектрофотометр, рентгено-флуоресцентный анализатор, телевизионные датчики, датчики ИК-излучения, датчики теплового излучения, метрологический модуль, гидролокатор бокового обзора, многолучевой эхолот, блок определения качества воды по трофосапробным показателям и характеристикам донных отложений, лидар, пенетрометр, датчики обнаружения метана и сероводорода (RU 2443001, 20.03.2012). Техническим результатом указанных системы и способа является расширение их функциональных возможностей.
Известна система подготовки к использованию вод открытых водоемов, включающая выбор объекта последовательно соединенные блок ввода данных о пользователе, блок формирования данных, блок памяти данных, последовательно соединенные блок ввода данных о объектах, блок формирования этих данных, блоков памяти, блок выбора объекта, компьютерная система управления соединенная с другими блоками, а также последовательно связанные между собой система анализа основных бальнеологических показателей вод данной местности, система оценки их свойств, система оформления бальнеологического заключения, система составления реестра водоемов, схема выбора водоема, схема выбора регламента его освоения, система выбора технологической схемы разработки, система подготовки организации разработки, система подготовки введения в эксплуатацию, связанные между собой система оценки эксплуатационных запасов, система определения прогнозных ресурсов, связанная с системой выбора технологической системы разработки и схема проведения маркетинговых исследований, связанная со схемой формирования сети потребителей воды, соединенной с системой введения в эксплуатацию, и связанная с системой оформления бальнеологического заключения система подготовки специалистов, при этом система управления включает в себя автоматизированную базу данных в виде бальнеологических анализов минеральных вод местных водоемов с известными свойствами и известных технологий разработки месторождений и скважин (RU 2419092, 20.05.2011). Данная система используется для глубокого анализа вод выбранной местности и выбора вод с искомыми свойствами.
Также из патентной документации РФ известны системы, способы и устройства для отбора проб сливной воды (RU 2457459, 27.07.2012; RU 2455671, 20.07.2012; RU 2440560, 20.01.2012; RU 2431126, 10.10.2011; RU 2437093, 20.12.2011; RU 2422796, 27.06.2011; RU 2334209, 20.09.2008; RU 2433220, 27.02.2011; RU 2405143, 27.11.2011; RU 2010147314, 27.05.2012; RU 12306545, 20.09.2007: RU 2009119457, 27.11.2011).
Из известных технических решений близким к заявленному является система контроля водоотводов, характеризующаяся тем, что она содержит множество объектов, являющимися источниками загрязнения сливной воды, которые отводятся от объектов сливной водой, каждый объект сообщен подводящим трубопроводом с водоочистителем для очистки сливной воды, исходящей от объекта, водоочиститель расположен на территории объекта и сообщен отводящим трубопроводом с магистральным трубопроводом, служащим для отвода сливной воды от всех объектов системы, выход каждого отводящего трубопровода расположен в сливном колодце, который сообщен с магистральным трубопроводом.
Из известных технических решений близким к заявленному является способ контроля водоотводов от объектов промышленного и бытового назначения, характеризующийся тем, что он содержит непрерывную регистрацию расхода сливной воды и наличия в ней признаков вредных веществ, ввод указанных данных в память блока управления системы контроля, сравнение данных с ранее полученными аналогичными данными, передачу сигнала на включение в работу устройства на забор пробы сливной воды, анализ пробы сливной воды.
Из известных технических решений близким к пробоотборнику, представленному в данном описании, является устройство, содержащее зонд, сообщенный с емкостью для пробы жидкости, между зондом и емкостью установлен обратный клапана (RU 2457459, 27.07.2012). В случае использования этого пробоотборника для отбора пробы сливной воды, требуется применение ручного труда, что отрицательно влияет на результаты анализа пробы сливной воды.
Близким к пробоотборнику, представленному в данном описании, является также пробоотборник, содержащий монтажный узел, узел отбора пробы, дополнительный трубопровод для транспортировки пробы с установленным в нем анализатором, емкость для пробы (RU 2455671, 20.07.2012). Этот пробоотборник имеет сравнительно сложную конструкцию, исключающую возможность его быстрой переналадки для использования в разных условиях эксплуатации.
Близким к пробоотборнику, представленному в данном описании, является также устройство для отбора пробы жидкости, содержащее емкость, сливной кран вертикальной трубки, насос, узел управления системой, дублирующие краны, привод, дополнительную трубку, верхний конец которой расположен выше максимального уровня налива жидкости в резервуар, трубка сообщена через трехходовой кран с насосом (RU 2431126, 10.10.2011).
Близким к пробоотборнику, представленному в данном описании, является устройство для отбора пробы жидкости, содержащее емкость, промежуточные мерные емкости с установленными в них трубками, привод, кран переключатель и другие элементы в их взаимосвязи (RU 2334209, 20.09.2008). Это устройство имеет сравнительно сложную конструкцию.
Наиболее близким к пробоотборнику, представленному в данном описании, является устройство для отбора пробы жидкости, содержащее емкость, сливной кран вертикальной трубки, насос, узел управления системой, дублирующие краны, привод, дополнительную трубку, верхний конец которой расположен выше максимального уровня налива жидкости в резервуар, трубка сообщена через трехходовой кран с насосом (RU 2431126, 10.10.2011). Общими признаками, представленного в данном описании пробоотборника и указанного наиболее близкого устройства являются признаки, что каждый из них содержит корпус, в корпусе установлена емкость приема пробы сливной воды, насос, привод, элементы управления и трубка для забора пробы жидкости и ее подачи в емкость, при этом верхний конец трубки расположен выше уровня налива жидкости в резервуар. Однако данное известное устройство для отбора пробы применительно к отбору пробы сливной воды не исключает использование ручного труда, что отрицательно влияет на результаты анализа пробы сливной воды в связи с влиянием человеческого фактора. Не регулярность и не точность по времени ручного отбора пробы сливной воды зачастую приводят к непригодности отобранной пробы сливной воды, поскольку период "жизни" пробы сливной воды от момента ее отбора и до момента окончания ее анализа крайне ограничен рядом известных факторов. Данное известное техническое решение не обеспечивает возможность автоматизации процесса отбора пробы и при этом его невозможно компоновать с компонентами автоматизированных систем контроля водоотводов сливной воды. Все это отрицательно влияет на экологическую эффективность системы контроля водоотводов, поскольку существующие системы контроля, как показывает практика, малоэффективны.
Известные технические решения (системы, способы, пробоотборники) вследствие рассогласованной работы каждого из них не отвечают современным требованиям комплексной экологической безопасности, вследствие недостаточного качественного контроля сливной воды в водоотводах и в связи с тем, что как системы, так и устройства для отбора проб сливной воды не исключают влияние человеческого фактора на выполняемые операции по контролю систем и по отбору проб. Это связано с тем, что известные системы, способы и пробоотборники, расположенные на каждой контролируемой территории, работают по отдельным программам, разработанным для этих территорий, причем программы не исключают влияние человеческого фактора на получаемые результаты контроля.
Техническим результатом группы изобретений является обеспечение экологической безопасности водоотливов путем повышения эффективности системы контроля водоотливов, способа контроля и пробоотборника для реализации способа.
Технический результат получен системой контроля водоотводов от объектов промышленного и бытового назначения, характеризующейся тем, что она содержит множество объектов, сообщенных отводящими трубопроводами с водоочистителями, каждый из которых расположен на территории объекта и сообщен с магистральным трубопроводом, при этом выход каждого отводящего трубопровода расположен в сливном колодце, в котором на его входе расположен контактирующий со сливной водой анализатор предельно-допустимой концентрации загрязнителей сливной воды, на стенке каждого сливного колодца закреплен робот-пробоотборник для отбора пробы сливной воды, поступающей в сливной колодец, робот контактирует с поступающей в колодец сливной водой периодически по команде, полученной им от центрального блока управления системы контроля, сливной колодец находится за пределами территории объекта, закрыт герметичной крышкой со специальным замком, исключающим несанкционированный доступ в колодец, в колодце расположены соединенные электромагнитными или электрическими связями с блоком управления и между собой анализатор воды, робот-пробоотборник и водораспределитель, сообщенный с отводящим трубопроводом, причем система оснащена обратным каналом, сообщенным с водоочистителем и водораспределителем, а блок управления оснащен GSM модулем.
Технический результат получен способом контроля водоотводов, характеризующимся тем, что он содержит непрерывную регистрацию расхода сливной воды и наличия в ней признаков загрязнителей, ввод указанных данных в память блока управления системы контроля, сравнение данных с ранее полученными аналогичными данными, передачу сигнала на включение в работу робота-пробоотборника на отбор пробы сливной воды и анализ пробы сливной воды на превышение предельно допустимых значений загрязнителей в сливной воде, причем отбор пробы осуществляют периодически, а регистрацию расхода сливной воды и наличия в ней признаков загрязнителей проводят непрерывно, далее по результатам анализа пробы запрещают или разрешают деятельность объекта.
Технический результат получен роботом-пробоотборником для реализации способа, характеризующимся тем, что он содержит герметичный корпус, в котором установлена емкость для приема пробы сливной воды, под емкостью в корпусе установлена мембрана, закрепленная на верхнем конце штока с возможностью ее перемещения вместе со штоком в вертикальном направлении, нижний конец штока шарниром соединен с верхним концом штанги, нижний конец которой шарниром соединен с рукоятью, к штанге и рукояти прикреплена водозаборная гибкая силиконовая трубка, верхний конец которой сообщен с полостью емкости, а нижний конец гибкой трубки расположен ниже нижнего конца рукояти, в корпусе под мембраной установлен вакуумный насос для подачи сливной воды в полость емкости, насос электрической связью связан через блок управления роботом с аккумулятором, который электрически соединен с блоком управления, причем аккумулятор и блок управления расположены в полости корпуса под мембраной и электрически соединены друг с другом, при этом блок' управления роботом-пробоотбоником оснащен контроллером с GSM модулем, а корпус оснащен фиксатором фиксации штока.
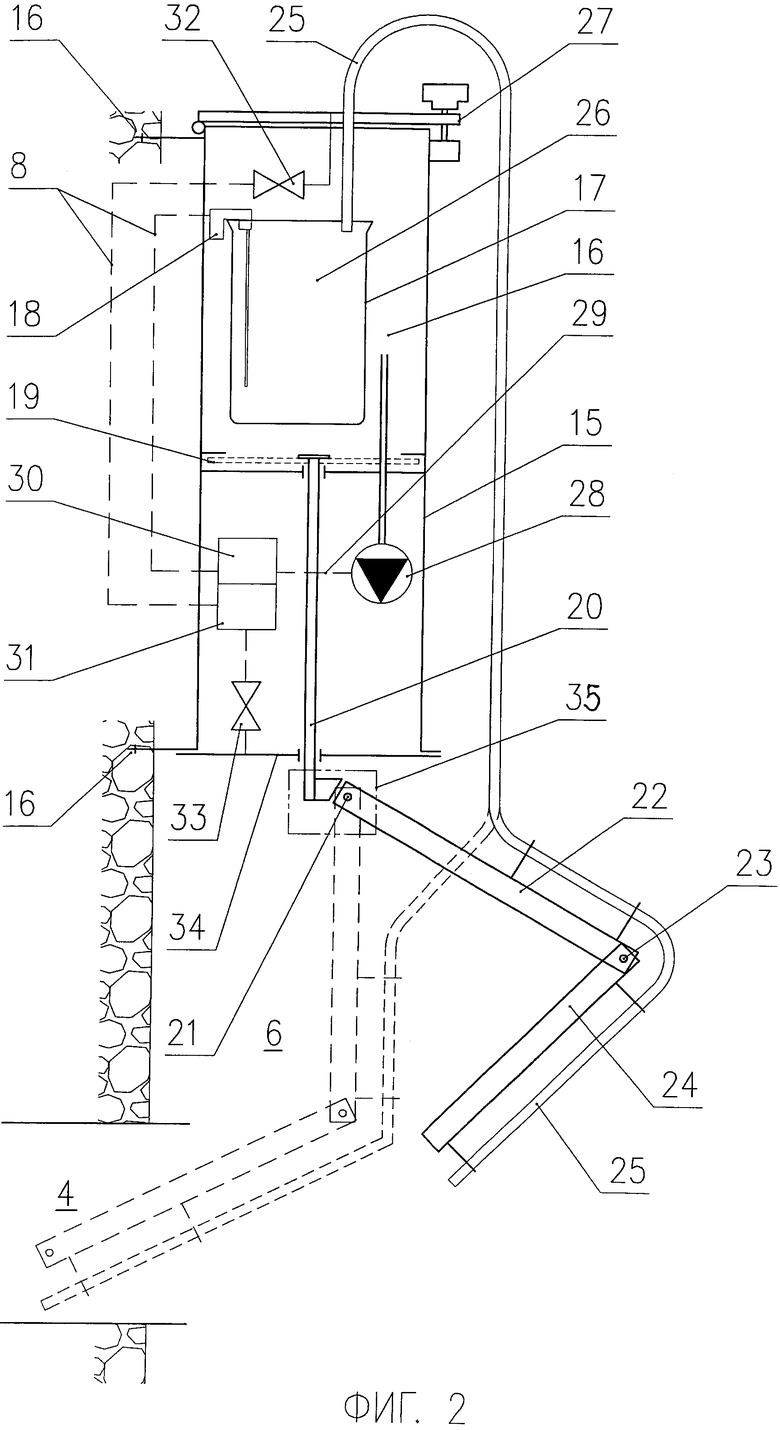
На фиг.1 показан один из примеров использования робота-пробоотборника в системе контроля водоотводов от объектов промышленного назначения;
На фиг.2 показан пример исполнения робота-пробоотборника.
Система содержит множество объектов 1 (фиг.1), каждый из которых сообщен подводящим трубопроводом 2 с водоочистителем 3 для очистки сливной воды от загрязнителей, исходящей от объекта 1. Под сливной водой понимается водопроводная вода, которая содержит упомянутые выше загрязнители.
Каждый водоочиститель 3 принадлежит объекту 1, расположен на территории объекта 1 и сообщен отводящим трубопроводом 4 с магистральным трубопроводом 5, служащим для отвода предварительно очищенной сливной воды от всех объектов системы и для ее подачи в водоочистители общего назначения (не показаны). Выход каждого отводящего трубопровода 4 расположен в (сточном) сливном колодце 6 (фиг.2), полость которого сообщена с магистральным трубопроводом 5 (фиг.1). В каждом сливном колодце на входе в него расположен анализатор 7 предельно-допустимой концентрации загрязнителей, находящихся в сливной воде. Анализатор 7 помимо основных функций выполняет также функции датчика, вырабатывающего сигнал в случае превышения предельно допустимой концентрации хотя бы одного загрязнителя в сливной воде, он постоянно контактирует со сливной водой, поступающей в колодец 6 от объекта 1.
На стенке сливного колодца закреплен робот-пробоотборник 8, предназначенный для отбора пробы сливной воды, поступающей в (сточный) сливной колодец 6. Система содержит установленный в каждом колодце 6 водораспределитель 9 сливной воды, который через анализатор 7 сообщен обратным каналом 10 с водоочистителем 3, причем привод (не показан) водораспределителя 9 связан электромагнитной или электрической связью 11 с блоком 12 управления. Сливной колодец находится за пределами территории объекта 1, закрыт герметичной крышкой с замком, исключающим несанкционированный доступ в колодец, к анализатору 7, роботу-пробоотборнику 8 и водораспределителю 9.
Установленные в каждом колодце 6 анализаторы 7, роботы-пробоотборники 8 и водораспределители 9 системы связаны электромагнитными или электрическими связями 11 между собой и с центральным блоком 12 управления. Блок 12 управления электромагнитными или электрическими связями 11 соединен с дисплеем 13 поста управления системой контроля и при этом блок 12 оснащен модулем 14, предназначенным для изменения программы работы робота-пробоотборника в зависимости от режима работы системы контроля. Пост управления показан пунктирными линиями. Модуль 14 имеет также средство управления работой привода водораспределителя 9 системы и это средство электромагнитными или электрическими связями 11 соединено с приводом водораспределителя (средства управления модулей и приводы водораспределителей на чертежах не показаны).
Работает система в совокупности с работой робота-пробоотборника. От объектов 1 системы загрязненная сливная вода по трубопроводам 2 поступает в водоочистители 3, в которых она очищается и после очистки поступает по трубопроводам 4 в рабочие полости анализаторов 7. Если сливная вода очищена водоочистителем 3 до установленной нормы, то она поступает через трубопровод 4 в магистральный трубопровод 5, по которому сливная вода отводится в зону окончательной ее очистки водоочистными сооружениями общего пользования. В случае превышения в сливной воде (поступающей по трубопроводу 4 к анализатору 7) хотя бы одного предельно допустимого значения параметра загрязнения, анализатор 7 выдает команду на привод робота-пробоотборника 8. Привод включает робот-пробоотборник в работу. Робот отбирает пробу загрязненной сливной воды, фиксирует показатели загрязнения воды и отправляет эти показатели в память блока 12 управления, на дисплей 13, поста управления системой контроля и на объект 1. На объект 1 показатели пробы воды отправляются в форме протокола или уведомления о превышении объектом 1 предельно допустимых концентраций загрязнения сливной воды. Далее в ручном или автоматическом режиме включается в работу привод соответствующего водораспределителя 9 и неочищенная или плохо очищенная водоочистителем 3 сливная загрязненная вода, прошедшая через анализатор 7, направляется водораспределителем 9 в водоочиститель 3 по обратному каналу 10. Если объект 1 не принимает мер для обеспечения нормальной очистки сливной воды принадлежащим ему водоочистителем 3, то такая загрязненная сливная вода циркулирует по замкнутому кругу трубопровод 4 - анализатор 7 -водораспределитель 9 и водоочиститель 3 в течение установленного периода времени, после которого подачу чистой воды на объект прекращают. Если объект 1 принял меры, то анализатор 7 вырабатывает положительный сигнал, который направляется в блок 12 управления системой, при этом блок 12 выдает команду на включение привода водораспределителя 9. Заслонка водораспределителя приводится в исходное положение и сливная вода, исходящая от объекта 1, проходит через колодец 6 и попадает в магистраль 5. Далее цикл повторяется.
В приведенном примере реализации робота-пробоотборника его корпус 15 (фиг.2) закреплен на стенке 16 (сточного) сливного колодца 6. Корпус 15 выполнен герметичным и имеет предпочтительно цилиндрическую форму. Внутри корпуса установлена съемная стеклянная емкость 17 для приема пробы сливной воды. Над верхним краем емкости 17 на корпусе 15 закреплен датчик 18 уровня сливной воды в емкости 17. Под емкостью 17 в корпусе 15 установлена гибкая мембрана 19, расположенная над днищем емкости 17. Мембрана 19 установлена на верхнем конце штока 20 с возможностью ее перемещения вместе со штоком в вертикальном направлении. В корпусе образована верхняя воздушная полость, расположенная над мембраной 19, и нижняя воздушная полость, расположенная под мембраной.
Нижний конец штока 20 шарниром 21 соединен с верхним концом штанги 22, нижний конец которой шарниром 23 соединен с рукоятью 24. К штанге 22 и рукояти 24 прикреплена водозаборная гибкая трубка 25, верхний конец которой сообщен с полостью 26 съемной емкости 17, а нижний конец гибкой трубки 25 расположен ниже нижнего конца рукояти 24. Корпус 15 герметично закрыт откидной крышкой 27. В нижней полости корпуса 15 под мембраной 19 установлен вакуумный насос 28 для подачи сливной жидкости в полость 26 емкости 17. Насос 28 электрической связью 29 связан через блок 30 управления роботом с аккумулятором 31. Аккумулятор электрически соединен с блоком 30 управления. Блок 30 и аккумулятор расположены в полости корпуса 15 под мембраной 19. Аккумулятор электрически соединен с верхним электромагнитным клапаном 32. Клапан 32 закреплен на крышке 27 корпуса. Аккумулятор электрически соединен с нижним электромагнитным клапаном 33, закрепленным на днище 34 корпуса 15. Аккумулятор 31 и блок 30 управления электрически соединены друг с другом через электромагнитные элементы управления. Робот-пробоотборник имеет закрепленный на корпусе фиксатор 35, взаимодействующий со штоком 20. Фиксатор предназначен для фиксации штока 20, штанги 22 и рукояти 24 в заданном не рабочем положении. Конструкция фиксатора в данном описании не раскрывается. В местах шарнирного соединения штанги 22 со штоком 20 и рукоятью 24 установлены специальные поворотные кулачки (не показаны), благодаря которым при опускании и подъеме штока 20 штанга 22 и рукоять поворачиваются относительно друг друга и относительно корпуса 15 в вертикальной плоскости. Это обеспечивает заданную траекторию движения конца рукояти 24, которая позволяет трубке 25 беспрепятственно входить в трубопровод 4 системы контроля водоотводов и выходить из него.
Таким образом, корпус 15 робота разделен мембраной на две полости, в верхней из которых расположена емкость 17 для пробы сливной воды, а в нижней полости расположены вышеуказанные аккумуляторная батарея, вакуумный насос, а также блок 30 управления роботом. Блок 30 имеет контроллер с GSM модулем, клапаны и реле (не показаны).
Работа робота-пробоотборника осуществляется как в автоматическом, так и ручном режимах. В ручном режиме после получения от анализатора 7 сигнала о превышении допустимого значения хотя бы одного компонента вредного вещества в сливной воде, персонал выезжает на место установки робота-пробоотборника, забирает отобранную роботом пробу, анализирует ее по всем предельно допустимым значениям вредных веществ и принимает меры к объекту 1, как источнику предельно допустимого загрязнения сливной воды. При этом проба сливной воды роботом отбирается по команде, полученной от персонала с помощью SMS сообщения, либо по проводной связи 11, либо по электромагнитной связи от анализатора 7 (контрольного устройства) системы.
Если робот-пробоотборник работает в системе контроля водоотводов в автоматическом режиме, то анализатор 7 отслеживает характеристики сточных вод на наличие в ней вредных веществ, анализирует температуру воды, РН, концентрацию солей, содержание нефтепродуктов и другие параметры. Анализатор выдаст управляющий сигнал на блок 30 управления роботом и по этому сигналу робот отсылает запрограммированное SMS сообщение на указанный в программе телефонный номер поста управления системой контроля и на блок 12 управления системой контроля водоотводов. Далее (в зависимости от программы) робот или сам принимает решение о начале отбора пробы или он ожидает разрешение блоком 12 на начало отбора пробы.
Получив от блока 12 системы подтверждение на отбор пробы, контроллер блока 30 управления роботом включает вакуумный насос 28, который производит откачку воздуха из верхней полости корпуса, расположенной над мембраной 19. В нижней полости корпуса, расположенной под мембраной 19, насосом 28 создается избыточное давление. Мембрана 19 поднимает шток 20 и освобождает фиксатор 35, при этом фиксатор выходит из взаимодействия со штоком 20. Шток 20, штанга 22 и рукоять 24 получают возможность перемещения и под действием сил тяжести мембраны 19, штока 20 штанги 22 и рукояти 24 они опускаются на незначительную высоту. Кулачки шарнирных соединений штока, штанги и рукояти поворачиваются и поворачивают штангу 22 и рукоять в положения, показанные на фиг.2. При этом рукоять 24 вводится сначала в коллектор, а затем в сообщенный с ним трубопровод 4. Далее электромагнитный клапан 33 открывается и избыточное давление из полости под мембраной 19 сбрасывается. Насос 28 продолжает работать и создает разрежение в полости над мембраной 19, в которой установлена емкость 17 для отбора пробы. Под действием разрежения, создаваемого насосом 28, по силиконовой трубке 25 в полость 26 емкости 17 засасывается сливная вода из водосливного колодца 6 (коллектора). При достижении заданного уровня сливной воды в емкости 17 контроллер блока 30 управления останавливает вакуумный насос 28 и открывает электромагнитный клапан 32. Через клапан 32 в полость над мембраной поступает воздух, давление воздуха над мембраной и под ней выравнивается, а засасывание сливной воды из трубопровода 4, сообщенного с колодцем 6 коллектора прекращается, когда сливная вода достигает в емкости 17 заданного уровня. После уравновешивания давлений в течение времени выдержки (установленного экспериментальным путем) электромагнитные клапаны 32 и 33 закрываются и контроллер блока 30 управления отсылает на блок 12 (фиг.1) управления системы контроля SMS сообщение о том, что проба сливной воды роботом взята. Сообщение отправляется на специально запрограммированные телефонные номера.
Далее в ручном или автоматическом режимах проводят анализ пробы сливной воды по всем предельно допустимым значениям вредных веществ и микроорганизм о и. в сливной воде. Анализатор, выполняющий функции контрольного устройства постоянно отслеживает характеристики сточных вод (температуру, PH, концентрацию солей, содержание нефтепродуктов и т.п.) и выдает управляющий сигнал на пробоотборник.
Конструкция робота позволяет отбирать пробы сливной воды в колодцах и коллекторах разных диаметров, как по команде, полученной с поста управления системой контроля, так и по сигналу, полученному от анализатора 7 системы.
Робот исключает влияние человеческого фактора при заборе пробы и при определении отклонения состава сливной воды от предельно допустимых норм, что существенно сокращает недопустимые сбросы сливной воды в сточные коллекторы. При этом сокращается период времени от момента отбора пробы сливной воды до момента окончания анализа пробы, что имеет существенное значение, так как время «жизни» большинства проб сливной воды ограничено. Робот исключает контакт пробы сливной воды с посторонними предметами, за исключением стеклянной емкости и силиконовой трубки, что обеспечивает чистоту отобранной пробы сливной воды. Универсальность робота позволяет отбирать пробы сливной воды в колодцах и коллекторах диаметром от 200 до 500 мм и при этом он исключает влияние человеческого фактора при заборе пробы и при определении отклонения состава сливной воды от предельно допустимых норм. В итоге существенно сокращаются недопустимые сильно загрязненные сбросы сливной воды в сточные коллекторы.
Герметичное исполнение робота, его автономная работа, не связанная с работой сточного колодца, простота и надежность конструкции, оснащение робота GSM модулем в диапазоне мобильной связи 1800 Гц, а также другие функциональные особенности, создали возможность обеспечения автоматизированного слежения и контроля за состоянием сливной воды в системе контроля. При этом возможность изменения программы работы робота позволяет компоновать робот с различными системами водоотводов сливной воды и обеспечивает работу группы роботов в одной системе водоотводов.
Существенным достоинством робота является то, что в связи с использованием в нем блока 30 управления роботом, совместимого с электронными блоками управления системой контроля водоотводов, появилась возможность простой компоновки робота с компонентами (блоками) управления системой водоотвода сливной воды.
Возможность автоматизации процесса отбора пробы, автоматизация процесса контроля водоотводов существенно повышают экологическую безопасность водоотливов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля водоотводов абонентов мегаполиса | 2016 |
|
RU2641759C2 |
| СПОСОБ КОНТРОЛЯ ВОДООТВОДОВ АБОНЕНТОВ НАСЕЛЕННОГО ПУНКТА | 2015 |
|
RU2618861C1 |
| Система водоотвода с поверхности мостового перехода | 2017 |
|
RU2665742C1 |
| Способ определения содержания свободной воды в углеводородном топливе | 2024 |
|
RU2824024C1 |
| СИСТЕМА СИФОННОГО ВОДООТВОДА | 1991 |
|
RU2029024C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОДАЧИ И ЦИРКУЛЯЦИИ СУСПЕНЗИЙ И РАСТВОРОВ В ПРОТОЧНОЙ ИЗМЕРИТЕЛЬНОЙ ЯЧЕЙКЕ АНАЛИЗАТОРОВ | 2013 |
|
RU2534236C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОДЕРЖАНИЯ ОЗОНА | 2006 |
|
RU2365913C2 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ ЗАКРЫТОЙ ОСУШИТЕЛЬНО-УВЛАЖНИТЕЛЬНОЙ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ ЖИВОТНОВОДЧЕСКИХ СТОКОВ | 2016 |
|
RU2622244C1 |
| Устройство для гидроавтоматического регулирования уровней воды | 1991 |
|
SU1807466A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР СТАТИЧЕСКОГО НАПОРА ВОДЫ ДЛЯ ЗАКРЫТЫХ ТРУБОПРОВОДОВ | 2011 |
|
RU2475705C1 |
Группа изобретений относится к системам и средствам контроля безопасности использования объектов промышленного и бытового назначения. Система контроля водоотводов содержит множество объектов, сообщенных отводящим трубопроводом с водоочистителями, каждый из которых расположен на территории объекта и сообщен с магистральным трубопроводом. Выход каждого отводящего трубопровода расположен в сливном колодце, в котором на его входе расположен контактирующий со сливной водой анализатор предельно допустимой концентрации загрязнителей сливной воды. На стенке каждого сливного колодца закреплен робот-пробоотборник для отбора пробы сливной воды, поступающей в сливной колодец. Робот контактирует с поступающей в колодец сливной водой периодически по команде, полученной им от центрального блока управления системы контроля. Сливной колодец находится за пределами территории объекта, закрыт герметичной крышкой с замком, исключающим несанкционированный доступ в колодец. В колодце расположены анализатор воды, робот-пробоотборник и водораспределитель, сообщенный с отводящим трубопроводом. Анализатор и робот-пробоотборник соединены электромагнитными или электрическими связями между собой и с блоком управления системой, который оснащен GSM модулем. При этом робот-пробоотборник содержит герметичный корпус, в котором установлена емкость для приема пробы сливной воды, под емкостью в корпусе установлена мембрана, закрепленная на верхнем конце штока с возможностью ее перемещения вместе со штоком в вертикальном направлении. Нижний конец штока шарниром соединен с верхним концом штанги, нижний конец которой шарниром соединен с рукоятью, а в местах шарнирного соединения штанги со штоком и рукоятью установлены поворотные кулачки. К штанге и рукояти прикреплена водозаборная гибкая силиконовая трубка, верхний конец которой сообщен с полостью емкости, а нижний расположен ниже нижнего конца рукояти. В корпусе под мембраной установлен вакуумный насос для подачи сливной воды в полость емкости, насос электрической связью связан через блок управления роботом с аккумулятором. Последний электрически соединен с блоком управления, причем аккумулятор и блок управления расположены в полости корпуса под мембраной и электрически соединены друг с другом. Блок управления роботом-пробоотборником оснащен контроллером с GSM модулем, а корпус оснащен фиксатором штока. Технический результат группы изобретений заключается в обеспечении экологической безопасности водоотливов путем повышения эффективности их контроля. 3 н.п. ф-лы, 2 ил.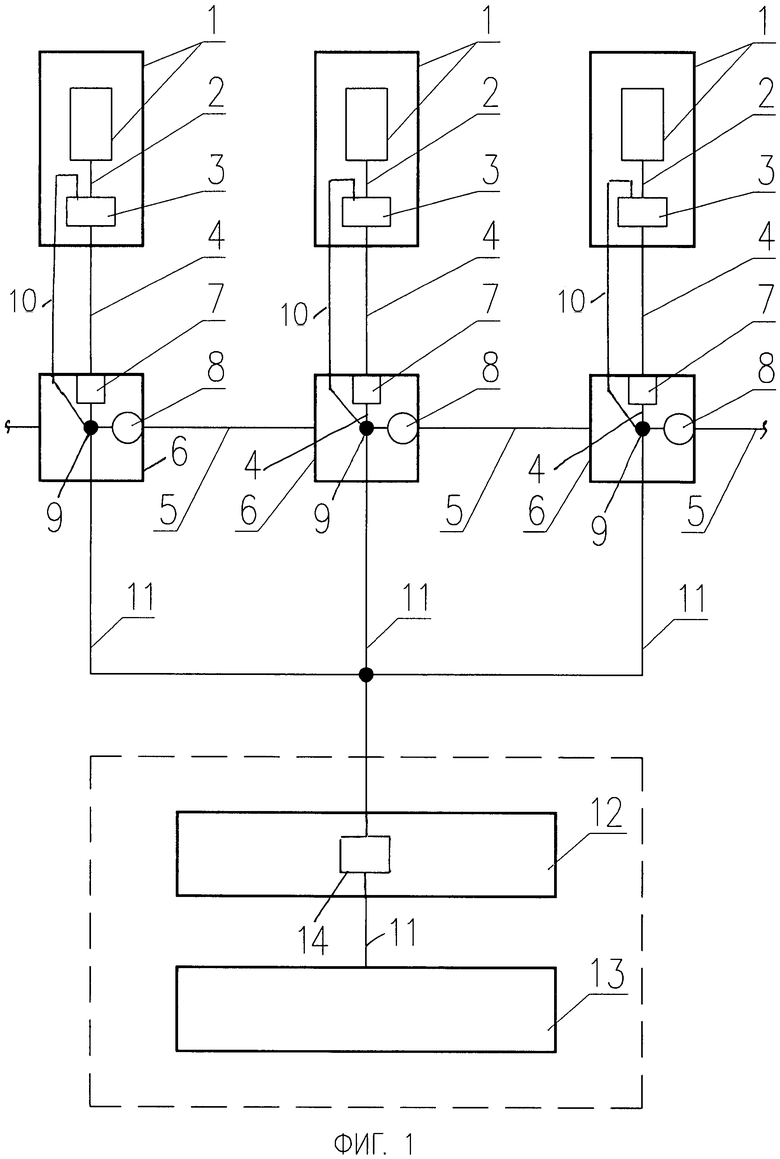
1. Система контроля водоотводов от объектов промышленного и бытового назначения, характеризующаяся тем, что она содержит множество объектов, сообщенных отводящими трубопроводами с водоочистителями, каждый из которых расположен на территории объекта и сообщен с магистральным трубопроводом, при этом выход каждого отводящего трубопровода расположен в сливном колодце, в котором на его входе расположен контактирующий со сливной водой анализатор предельно допустимой концентрации загрязнителей сливной воды, на стенке каждого сливного колодца закреплен робот-пробоотборник для отбора пробы сливной воды, поступающей в сливной колодец, робот контактирует с поступающей в колодец сливной водой периодически по команде, полученной им от центрального блока управления системы контроля, сливной колодец находится за пределами территории объекта, закрыт герметичной крышкой с замком, исключающим несанкционированный доступ в колодец, в колодце расположены соединенные электромагнитными или электрическими связями с блоком управления и между собой анализатор воды, робот-пробоотборник и водораспределитель, сообщенный с отводящим трубопроводом, причем система оснащена обратным каналом, сообщенным с водоочистителем и водораспределителем, а блок управления оснащен GSM-модулем.
2. Способ контроля водоотводов от объектов промышленного и бытового назначения, характеризующийся тем, что он содержит непрерывную регистрацию расхода сливной воды и наличия в ней признаков загрязнителей, ввод указанных данных в память блока управления системы контроля, сравнение данных с ранее полученными аналогичными данными, передачу сигнала на включение в работу робота-пробоотборника на отбор пробы сливной воды и анализ пробы сливной воды на превышение предельно допустимых значений загрязнителей в сливной воде, причем отбор пробы осуществляют периодически, а регистрацию расхода сливной воды и наличия в ней признаков загрязнителей проводят непрерывно, далее по результатам анализа пробы запрещают или разрешают деятельность объекта.
3. Робот-пробоотборник для контроля водоотводов от объектов промышленного и бытового назначения, характеризующийся тем, что он содержит герметичный корпус, в котором установлена емкость для приема пробы сливной воды, под емкостью в корпусе установлена мембрана, закрепленная на верхнем конце штока с возможностью ее перемещения вместе со штоком в вертикальном направлении, нижний конец штока шарниром соединен с верхним концом штанги, нижний конец которой шарниром соединен с рукоятью, а в местах шарнирного соединения штанги со штоком и рукоятью установлены поворотные кулачки, к штанге и рукояти прикреплена водозаборная гибкая силиконовая трубка, верхний конец которой сообщен с полостью емкости, а нижний конец гибкой трубки расположен ниже нижнего конца рукояти, в корпусе под мембраной установлен вакуумный насос для подачи сливной воды в полость емкости, насос электрической связью связан через блок управления роботом с аккумулятором, который электрически соединен с блоком управления, причем аккумулятор и блок управления расположены в полости корпуса под мембраной и электрически соединены друг с другом, при этом блок управления роботом-пробоотбонником оснащен контроллером с GSM-модулем, а корпус оснащен фиксатором штока.
| СПОСОБ СБОРА ИНФОРМАЦИИ ОБ ЭКОЛОГИЧЕСКОМ СОСТОЯНИИ РЕГИОНА И АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2443001C1 |
| CN 202120124 U, 18.01.2012 | |||
| Электронный счетно-решающий прибор | 1949 |
|
SU82723A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ОДНОФАЗНОГО ТОКА ПОСТОЯННОЙ ЧАСТОТЫ В ТРЕХФАЗНЫЙ ТОК ПЕРЕМЕННОЙ ЧАСТОТЫ | 1933 |
|
SU43079A1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБ ЖИДКИХ ПРОДУКТОВ ИЗ РЕЗЕРВУАРА | 2007 |
|
RU2431126C2 |
| СИСТЕМА ОПЕРАТИВНОГО БИОЛОГИЧЕСКОГО МОНИТОРИНГА И ИНДИКАЦИИ | 2010 |
|
RU2437093C1 |
| JP 2004054525 A, 19.02.2004 | |||
| Способ испытания усталостной прочности стержневых образцов материалов | 1958 |
|
SU115005A1 |

