Изобретение относится к оборудованию для нефтяной и газовой промышленности, а именно к устройствам для спуско-подъемных операций с трубами при бурении, ремонте и освоении скважин.
Известен элеватор для труб (а.с. №1286729, МПК Е21В 19/06, опубликовано 30.01.1987), содержащий:
- корпус с выемкой для трубы и стойками, в которых шарнирно установлен опорный элемент с роликом;
- створку с замком и защелку, шарнирно связанные с корпусом,
- механизм поворота створки, содержащий подпружиненное полукольцо, установленное во внутреннем пазу корпуса и взаимодействующее с трубой, опорным элементом, створкой и защелкой;
- и механизм фиксации створки, выполненный в виде замка, шарнирно связанного со створкой, и зуба створки, взаимодействующих при открытии-закрытии элеватора с защелкой, установленной в корпусе на оси, имеющей упор и возвратную пружину.
Недостатком известного устройства является повышенная трудоемкость эксплуатации, обусловленная тем, что поворот створки обеспечивается только при определенном взаимном пространственном положении элеватора и трубы, продольная ось которой должна иметь определенный угол наклона относительно продольной оси выемки корпуса элеватора и располагаться в ее плоскости симметрично относительно стоек корпуса. При невыполнении этих условий ролик опорного элемента не будет контактировать с трубой, створка не откроется и, следовательно, не будет осуществлен захват трубы, вследствие чего операцию по установке элеватора на трубу необходимо повторять, что требует дополнительных трудозатрат.
Кроме того, ненагруженный весом колонны бурильных труб крюкоблок, обладающий вследствие своих габаритов значительной парусностью, способен раскачиваться на талевой системе от воздействия ветровой нагрузки, что приведет к его смещению как от вертикальной оси вышки буровой установки, так и от продольной оси желоба приемного мостка, на котором расположена труба, приготовленная к захвату для наращивания. Этому же будет способствовать и смещение вышки от вертикали вследствие неравномерной осадки опор вышечного блока, например, от одностороннего расположения свечей на одном из подсвечников. Поэтому обслуживающий персонал при осуществлении захвата трубы будет вынужден вручную ориентировать элеватор относительно лежащей в желобе трубы, оттягивая его вместе с массивным крюкоблоком и одновременно поворачивая на штропах с тем, чтобы ролик опорного элемента расположился своей выемкой под трубой, что трудоемко и небезопасно.
К недостаткам известного устройства следует отнести также низкую надежность работы и малый ресурс работоспособности механизма поворота створки ввиду возможного разрушения насечки, что обусловлено динамикой ее взаимодействия с полукольцом. Последнее, в свою очередь, объясняется тем, что для захвата трубы элеватор на штропах, соединенных с крюкоблоком, должен быть вручную оттянут от центра ротора и заведен под трубу. Далее, удерживая вручную в этом положении, элеватор необходимо поднять до контакта ролика с трубой, а затем отпустить, продолжая подъем. При этом элеватор со штропами, обладая потенциальной энергий ввиду их значительной массы и отклонения от вертикали, будут стремительно возвращаться к исходному положению, т.е. к вертикальной оси, проходящей через центр ротора и вышки, что приведет к преобразованию потенциальной энергии в кинетическую энергию удара ролика в муфтовую часть замка трубы и последующему срабатыванию механизма поворота створки, в котором участвует ребро полукольца и один из зубьев насечки. Такое динамичное взаимодействие этих деталей будет вызывать значительные контактные напряжения, а их многократное повторение при спуско-подъемных операциях может привести к наклепу и последующему хрупкому разрушению как зубьев насечки, так и взаимодействующего с ними ребра полукольца.
Низкая надежность работы известного устройства может быть связана также и с особенностями его конструкции, включающей множество взаимодействующих между собой мелких деталей и узлов, выступающих за габариты массивного корпуса и створки, в том числе: ролик, пружины, тяга и стойки, которые могут повредиться при падениях его на пол вышечного блока, случайном падении на него вспомогательного инструмента и приспособлений (другого элеватора, кувалды, лома и пр.) или соударении элеватора с металлоконструкциями буровой установки. Последнее возможно из-за того, что элеватор, будучи подвешенным на штропах к крюкоблоку, будет раскачиваться от воздействия ветровой нагрузки, что может сопровождаться его соударениями с металлоконструкциями буровой установки и поломкой перечисленных мелких деталей и узлов.
Таким образом, совокупность конструктивных особенностей и технологии применения известного элеватора приводит к повышению трудоемкости и снижению безопасности его эксплуатации, снижению надежности работы и малому ресурсу работоспособности.
Известен элеватор корпусной (патент РФ №2414581, МПК Е21В 19/06, опубликовано 20.03.2011), содержащий:
- корпус, на лицевой стороне которого выполнена выемка для трубы,
- створку, шарнирно соединенную с корпусом и снабженную рукояткой;
- и механизм фиксации створки, содержащий
- подпружиненный поворотный фиксатор створки в виде шарнирно связанной с корпусом скобы, взаимодействующей со створкой в закрытом положении;
- и подпружиненный поворотный стопор фиксатора створки в виде шарнирно связанной со скобой защелки с рукояткой ручного управления и запорным зубом, взаимодействующей со скобой и створкой в ее закрытом положении;
- причем запорный зуб в закрытом положении створки взаимодействует с выполненным в скобе и створке радиусным пазом, центр которого в закрытом положении створки совпадает с центром оси поворота запорного зуба.
Недостатком известного устройства является повышенная трудоемкость эксплуатации, связанная с недостаточно эргономичной конструкцией, которая предполагает необходимость выполнения операций открытия-закрытия створки и защелки скобы одновременно двумя руками. Кроме того, повышенная трудоемкость эксплуатации связана с тем, что у известного элеватора перед началом захвата трубы должна быть открыта створка, ввиду чего у него будет смещен центр тяжести. Тем самым на элеватор, шарнирно подвешенный на штропах, будет воздействовать момент сил, поворачивающий его в наклонное положение относительно вертикали. Поэтому перед закрытием створки элеватор необходимо вручную возвращать в вертикальное положение, поворачивая его за рукоятки для обеспечения соосности трубы и выемки в корпусе. Учитывая значительную массу элеватора, особенно для обсадных труб большого диаметра, исчисляемую сотнями килограммов, эта операция весьма трудоемка и требует для своего выполнения участия нескольких рабочих.
К недостаткам известного элеватора корпусного также следует отнести низкую надежность и, следовательно, небезопасность эксплуатации, обусловленную тем, что запорный зуб защелки, обеспечивающий фиксацию створки в закрытом положении, подвергается значительным ударным нагрузкам в момент закрытия, а также абразивному износу в процессе поворота на закрытие при скольжении по радиусной выемке скобы и створки. Суммарное воздействие этих процессов может привести к тому, что у зуба защелки произойдет хрупкое разрушение ввиду наклепа или уменьшение длины фиксирующей части, вследствие чего не будет обеспечиваться фиксация створки в закрытом положении, а это может привести к открытию створки и падению поднятой трубы на пол вышечного блока или падению колонны труб в скважину.
Совокупность перечисленных конструктивных особенностей повышает трудоемкость, снижает надежность и безопасность известного элеватора корпусного.
Дополнительным недостатком аналога и прототипа являются их ограниченные эксплуатационные возможности ввиду невозможности применения при спуско-подъемных операциях на скважинах, предназначенных для совместно-раздельной эксплуатации двух продуктивных пластов через две колонны лифтовых труб. Известные устройства могут обеспечить спуск в скважину двух лифтовых колонн труб, но только последовательно, одна за другой, что небезопасно ввиду возможной посадки и заклинивания второй спускаемой колонны труб с последующим прихватом обеих колонн в скважине вследствие закручивания (обвивания) спускаемой колонны труб относительно уже спущенной. Последнее объясняется тем, что в скважинах, предназначенных для совместно-раздельной эксплуатации двух продуктивных пластов, основной ствол, как правило, выполняется вертикальным, а второй ствол - с отходом от вертикали, т.е. наклонным и зачастую с горизонтальным окончанием. Но поскольку на практике идеальную вертикальность скважины обеспечить невозможно, ее основной ствол во время бурения ввиду правого вращения породоразрушающего инструмента будет представлять собой винтовую линию правого вращения с большим шагом, спуск в который как колонны бурильных труб, а затем колонны обсадных труб и в последующем лифтовой колонны насосно-компрессорных труб не вызывает затруднений. Однако при спуске второй лифтовой колонны ее трубы, следуя по винтовой линии основного вертикального ствола, будут закручиваться вокруг труб уже спущенной лифтовой колонны, что может привести к заклиниванию и прихвату обеих колонн труб. Поэтому для совместно-раздельной эксплуатации двух продуктивных пластов зачастую используют лишь одну лифтовую колонну насосно-компрессорных труб, а в качестве второй используют эксплуатационную колонну, что может вызвать ускоренный износ ее труб с потерей герметичности колонны, восстановление которой требует дорогостоящего ремонта.
Задачей изобретения является создание технического решения элеватора корпусного для одновременного спуска-подъема двух колонн труб, лишенного перечисленных недостатков.
Техническим результатом решения этой задачи является повышение надежности, безопасности и расширение эксплуатационных возможностей элеватора корпусного для одновременного спуска-подъема двух колонн труб.
Для обеспечения этого результата известный элеватор, содержащий
- корпус, на лицевой стороне которого выполнена радиусная выемка для трубы,
- створку, шарнирно соединенную с корпусом,
- и механизм фиксации створки, содержащий
- поворотный рычаг управления с рукояткой,
- взаимодействующий с рычагом управления подпружиненный поворотный стопор створки, в закрытом положении взаимодействующий с радиусным пазом, центр которого в закрытом положении створки совпадает с центром оси поворота стопора створки,
- и подпружиненную поворотную защелку, взаимодействующую со стопором в закрытом положении створки,
Согласно изобретению
- корпус с обратной стороны дополнительно оснащен противовесом,
- в корпусе на лицевой стороне выполнена дополнительная радиусная выемка для второй трубы, оснащенная дополнительной створкой, шарнирно соединенной с корпусом, и дополнительным механизмом фиксации дополнительной створки,
- при этом радиусные выемки для труб, створки и механизмы их фиксации симметричны относительно поперечной оси корпуса,
- а расстояние между центрами радиусных выемок превышает диаметр муфт, соединяющих трубы,
- подпружиненные поворотные защелки шарнирно закреплены на корпусе,
- поворотные рычаги управления с рукоятками и стопоры шарнирно установлены на створках и взаимодействуют между собой,
- радиусные пазы выполнены в стенке радиусных выемок,
- а линейные размеры в горизонтальной плоскости, перпендикулярной продольной оси, проходящей через центры радиусных выемок, в закрытом положении створок удовлетворяют соотношениям
L1<L2+R;
L2+R<L3+r;
h>r/3,
где L1 - длина створки 10 от центра ее оси поворота до торца,взаимодействующего со стенкой радиусной выемки 4;
L2 - расстояние от центра оси створки 10 до центра радиусной выемки 4, выполненной в корпусе 1;
R - величина радиуса выемки 4;
L3 - расстояние между центрами осей створки 10 и стопора 14;
r - радиус дуги опорной поверхности стопора 14, равный радиусу
ответной поверхности паза 16, выполненного в корпусе 1;
h - глубина паза 16;
- причем угол β между линией, проходящей через центры осей створки и ее стопора, и линией, проходящей через центр оси стопора и через середину дуги его опорной поверхности, взаимодействующей с ответной поверхностью радиусного паза корпуса, в закрытом положении створки равен 45°.
Изобретение поясняется чертежами, где
- на фиг.1 изображен заявляемый элеватор, вид спереди в закрытом положении;
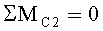
- на фиг.2 - вид А на фиг.1 элеватора;
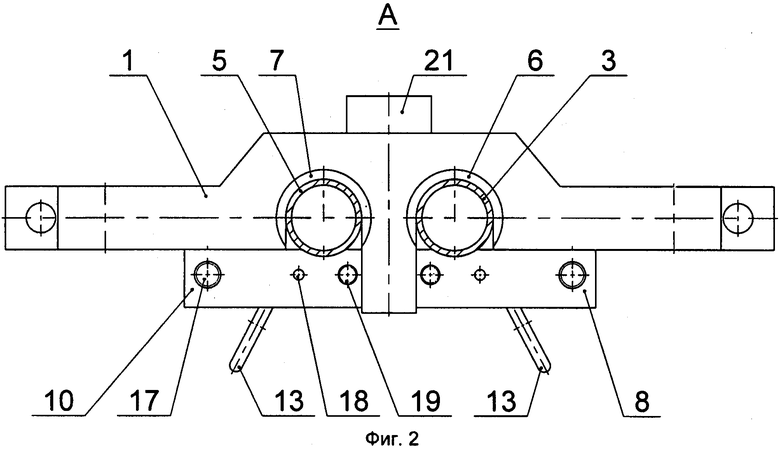
- на фиг.3 - элеватор, вид спереди в открытом положении;
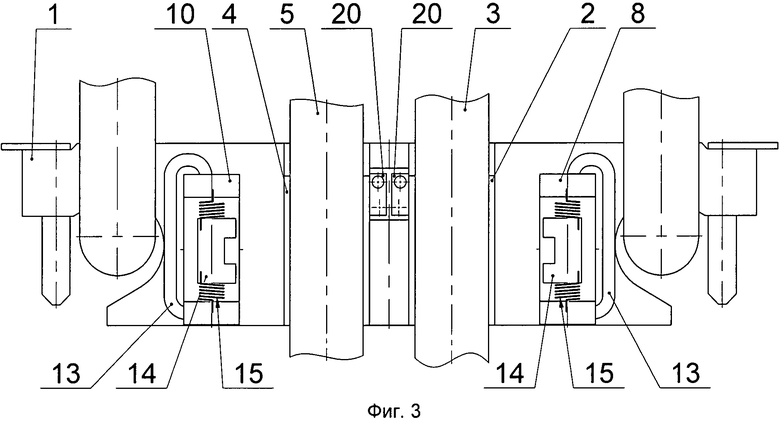
- на фиг.4 - вид сверху на левую часть элеватора, створка и механизм фиксации в закрытом положении;
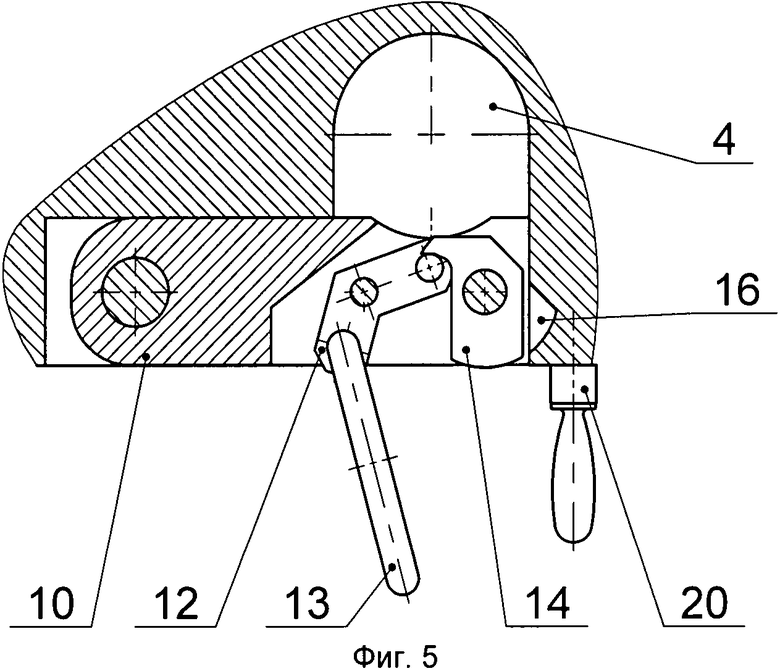
- на фиг.5 - вид сверху на левую часть элеватора, створка в расфиксированном положении;
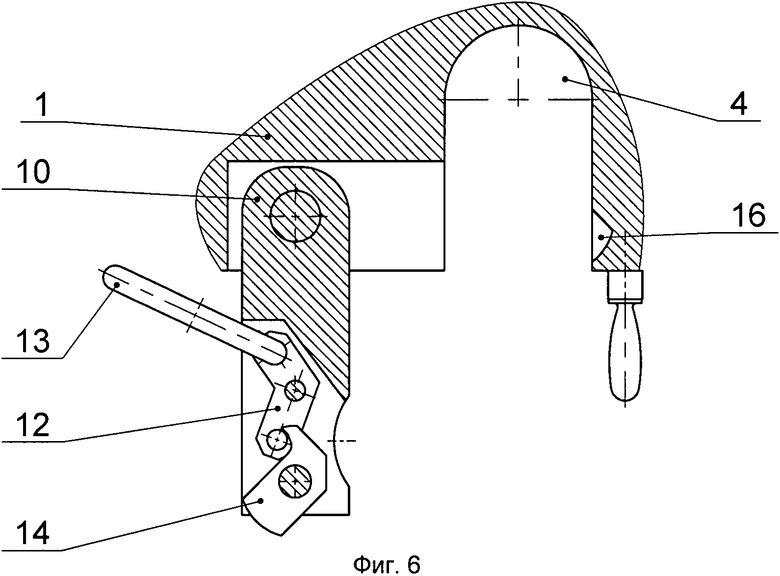
- на фиг.6 - вид сверху на левую часть элеватора, створка открыта;
- на фиг.7 - схемное изображение створки и стопора на фиг.4 в виде разрезной статически определимой рамы с опорами и шарниром.
Заявляемый элеватор для спуска-подъема двух колонн труб содержит (фиг.1) корпус 1, на лицевой стороне которого выполнена радиусная выемка 2 для трубы 3 и дополнительная радиусная выемка 4 для второй трубы 5, благодаря чему заявляемый элеватор может обеспечить спуско-подъемные операции с двумя колоннами труб и имеет более расширенные эксплутационные возможности по сравнению с прототипом. Этому же способствует и то, что расстояние между центрами радиусных выемок 2 и 4 превышает диаметр муфт или замков, соединяющих трубы 3 и 5, т.к. в противном случае трубы не смогли бы одновременно разместиться в заявляемом элеваторе, что не позволило бы ему выполнить свое функциональное назначение. Обе выемки 2 и 4 имеют опорные поверхности 6 и 7 (фиг.2), с которыми взаимодействуют торцы муфт (не показаны) труб 3 и 5 при спуско-подъемных операциях. На корпусе 1 шарнирно закреплена створка 8, перекрывающая выемку 2 для трубы 3 и снабженная механизмом фиксации 9, которым створка 8 фиксируется в закрытом положении. Аналогичная дополнительная створка 10, снабженная дополнительным механизмом фиксации 11, перекрывает выемку 4 для второй трубы 5, при этом как радиусные выемки 2 и 4, так и створки 8 и 10, а также механизмы их фиксации 9 и 11 симметричны относительно поперечной оси корпуса 1 (фиг.2). Последнее обстоятельство обеспечивает возможность равномерного распределения нагрузки на детали и механизмы заявляемого элеватора, что повышает надежность его работы и удобство эксплуатации.
Каждый из механизмов фиксации 9 и 11 створок 8 и 10 (фиг.1, 2, 3 и 4) содержит поворотный рычаг управления 12 с рукояткой 13, который взаимодействует с поворотным стопором створки 14, оснащенным пружинами 15 и взаимодействующим в закрытом положении створок 8 и 10 с радиусным пазом 16 (на фиг.4), выполненным в стенке радиусной выемки 4 корпуса 1. Шарнирное соединение створок 8 и 10 (фиг.2, 4) с корпусом 1 осуществляется осями 17, рычаги управления 12 соединены со створками 8 и 10 осями 18, а стопоры 14 соединены со створками 8 и 10 осями 19, при этом центры радиусных пазов 16 в закрытом положении створок 8 и 10 совпадают с центрами осей 19.
Размещение рычагов управления 12 с рукояткой 13 и стопоров 14 с пружинами 15 на створках 8 и 10 обеспечивает возможность того, что обе створки - правую 8 и левую 10 может открывать и закрывать один работник двумя руками одновременно. Тем самым обеспечивается удобство эксплуатации заявляемого элеватора по сравнению с прототипом, где одной рукой необходимо поворачивать рукоятку механизма фиксации для расфиксации створки, а другой рукой открывать створку.
Кроме того, механизмы фиксации 9 и 11 (фиг.1) дополнительно содержат подпружиненные поворотные защелки 20, шарнирно закрепленные на корпусе 1, которые взаимодействуют со стопорами 14, фиксируя их при закрытом положении створок 8 и 10.
Шарнирное крепление защелок 20 (фиг.1, 4) на корпусе 1 и выполнение радиусных пазов 16 в корпусе 1 конструктивно обеспечивают работоспособность механизмов фиксации 9 и 11 створок 8 и 10. Это обусловлено тем, что стопоры 14 размещены на створках 8 и 10 и поэтому удерживание и фиксация последних в закрытом положении относительно выемок 2 и 4 возможно только конструктивными элементами, размещенными на корпусе 1.
Корпус 1 с обратной стороны дополнительно оснащен противовесом 21 (фиг.2) для обеспечения горизонтального положения элеватора при открытых створках 8 и 10.
Дальнейшее описание конструкции заявляемого элеватора, касающееся соотношения линейных размеров его деталей, приведено для его левой стороны с выемкой 4, створкой 10 и механизмом фиксации 11, изображенной на фиг.4, 5 и 6. Аналогичным соотношением размеров деталей обладает и правая сторона с выемкой 2, створкой 8 и механизмом фиксации 9.
Линейные размеры деталей механизма фиксации 11 и взаимодействующих с ними элементов конструкции корпуса 1 (радиусной выемки 4 и радиусного паза 16) в горизонтальной плоскости, перпендикулярной продольной оси корпуса 1, проходящей через центры радиусных выемок 2 и 4, в закрытом положении створки 10 удовлетворяют соотношениям:

где L1 - длина створки 10 от центра ее оси поворота до торца, взаимодействующего со стенкой радиусной выемки 4;
L2 - расстояние от центра оси створки 10 до центра радиусной выемки 4, выполненной в корпусе 1;
R - величина радиуса выемки 4;

где L3 - расстояние между центрами осей створки 10 и стопора 14;
r - радиус дуги опорной поверхности стопора 14, равный радиусу ответной поверхности паза 16, выполненного в корпусе 1;

где h - глубина паза 16.
Соотношение размеров (1) конструктивно обеспечивает возможность поворота створки 10 из открытого положения (фиг.6) в закрытое (фиг.4), т.к. только при таком соотношении створка 10 может беспрепятственно повернуться и занять рабочее положение, удерживая трубу 5 в выемке 4.
Соотношение размеров (2) при закрытом положении створки 10 обеспечивает невозможность ее раскрытия из рабочего положения при воздействии нагрузки от трубы 5.
Соотношение размеров (3) гарантирует возможность контакта середины 22 дуги опорной поверхности стопора 14 с ответной поверхностью радиусного паза 16.
При этом угол β между линией, проходящей через центр оси 17 створки 10 и центр оси 19 стопора 14, и линией, проходящей через центр оси 19 стопора 14 и через середину 22 дуги его опорной поверхности, взаимодействующей с ответной поверхностью радиусного паза 16, в закрытом положении створки 10 равен 45°.
Такая величина угла β обусловлена тем, что она является наиболее оптимальной для минимизации нагрузки Р от трубы 5 на створку 10 и детали механизма фиксации 11, а именно: на стопор 14 и оси 17 и 19. Это объясняется тем, что с точки зрения науки «Сопротивление материалов» створка 10 и стопор 14 в закрытом положении (фиг.4) схематично представляют собой разрезную статически определимую раму (фиг.7), собранную из двух стержней 25 и 26, соединенных шарниром в виде оси 19, и имеющую две опоры: шарнирно-подвижную в виде оси 17 и жесткое защемление в виде контакта стопора 14 в точке 22 с поверхностью паза 16 (фиг.7). Определение реакций опор и реактивного момента для такой рамы с последующим определением нагрузок на детали возможно решением системы 3-х уравнений статики и 2-х дополнительных уравнений относительно шарнира в виде оси 19, соединяющего стержни 25 и 26 рамы:

где (фиг.7)
- HA - горизонтальная реакция в опоре А;
- RB - вертикальная реакция в опоре В;
- β - угол между стержнями 1 и 2;
- HB - горизонтальная реакция в опоре В;
- ∑MA=0 - уравнение равновесия для суммы моментов всех сил относительно опорного шарнира А;
- L4 - расстояние по горизонтали между опорами А и В;
- P - нагрузка на стержень 1 от трубы 5;
- L2 - расстояние по горизонтали между опорой А и точкой D;
- MB - опорный момент в опоре В;
- ∑MB=0 - уравнение равновесия для суммы моментов всех сил относительно опоры В;
- RA - вертикальная реакция в опоре А;
- L7 - расстояние по горизонтали между точкой D и опорой В;
- L8 - расстояние по вертикали между линией АС и опорой В;
- ∑MC1=0 - дополнительное уравнение равновесия для суммы моментов всех сил относительно центра шарнира С, расположенных слева от него;
- L5 - расстояние по горизонтали между точкой D и шарниром С;
- ∑ МC2=0 - дополнительное уравнение равновесия для суммы моментов всех сил относительно центра шарнира С, расположенных справа от него;
- r - длина стержня 2, равная радиусу дуги опорной поверхности стопора 14.
Решение системы (4) этих 5-ти уравнений показывает, что только при угле β=45° величина горизонтальной реакции НA в опоре А будет равна нулю, т.е. НA=0. В первую очередь это вытекает из решения первого уравнения ∑Z=0, где при подстановке величин синуса и косинуса угла β=45° вертикальная реакция RB и горизонтальная реакция НB в опоре В взаимно уничтожаются и тогда горизонтальная реакция НA=0.
Это объясняется тем, что только при угле β=45° функции синус и косинус равны между собой, т.к. sin45°=cos45°=0,707. При любой другой величине угла β функции синус и косинус становятся неравными и тогда в опоре А возникает горизонтальная реакция HA и, следовательно, на стержни 25 и 26, а также на опоры А и В и шарнир С будут воздействовать нагрузки, превосходящие по величине нагрузки при угле β=45°.
Тем самым приведенные выше соотношения (1) и (2) линейных размеров деталей механизма фиксации 11 и взаимодействующих с ними элементов конструкции корпуса 1 обеспечивают работоспособность заявляемого элеватора и выполнение им своего функционального назначения, т.е захват и освобождение труб при спуско-подъемных операциях. Одновременно с этим соотношение (3) и величина угла β=45° в совокупности обеспечивают минимизацию нагрузки Р от трубы 5 на створку 10 и детали механизма фиксации 11, а именно: на стопор 14 и оси 17 и 19, что позволяет при прочих равных условиях конструктивно уменьшить размеры перечисленных деталей и, следовательно, уменьшить их массу, т.е. снизить металлоемкость и стоимость заявляемого элеватора, что повышает его эксплуатационные характеристики.
Заявляемый элеватор для спуска-подъема двух колонн труб работает следующим образом (фиг.1). Перед использованием корпус 1 элеватора подвешивают к крюкоблоку буровой установки (не показан) на штропах 23, которые фиксируются пальцами 24. Пальцы 24 стопорят от выпадения из корпуса 1 любым известным способом, например болтовым соединением.
Поскольку выемки 2 и 4, створки 8 и 10, а также механизмы их фиксации 9 и 11 симметричны относительно поперечной оси корпуса 1 (фиг.2), то принцип работы деталей и механизмов, расположенных на каждой из сторон (левой или правой) одинаков, отличие только в противоположном направлении воздействия для открытия-закрытия, причем обе створки - правую 8 и левую 10 может открывать и закрывать один работник двумя руками одновременно. Тем самым обеспечивается как удобство эксплуатации заявляемого элеватора по сравнению с прототипом, где одной рукой необходимо поворачивать рукоятку механизма фиксации для расфиксации створки, а другой рукой открывать створку, так и расширение эксплуатационных возможностей заявляемого элеватора по сравнению с прототипом благодаря возможности выполнения спуско-подъемных операций одновременно с двумя колоннами труб.
Дальнейшее описание работы заявляемого элеватора приведено для левой половины (фиг.3, 4, 5 и 6) со створкой 10, управляемой левой рукой работника. Аналогичные операции осуществляются и с правой створкой 8, управляемой правой рукой работника.
Для захвата труб 3 и 5 у элеватора необходимо открыть створки 8 и 10 (фиг.3), для чего вначале поворачивают в вертикальное положение защелки 20, выводя их из взаимодействия со стопорами 14, что обеспечивает расфиксацию последних и возможность их вывода из радиусных пазов 16 (фиг.4 и 5) путем поворота рукоятки 13. При этом рычаг управления 12, поворачиваясь на оси 18, шарнирно воздействует на стопор 14 и, преодолевая сопротивление возвратных пружин 15, выводит его из радиусного паза 16 (фиг.5), а рукоятка 13 с рычагом управления 12 займут крайнее правое положение. Дальнейшим воздействием через рукоятку 13 и ось 18 на створку 10 поворачивают последнюю на оси 17 в открытое положение (фиг.6), что обеспечивается благодаря соотношению размеров (1), т.к. только при таком соотношении размеров створка 10 может беспрепятственно повернуться и открыть выемку 4. Одновременно правой рукой работник производит аналогичные операции на правой створке 8, открывая выемку 2.
Будучи открытыми и обладая значительной массой, створки 8 и 10, тем не менее, не могут повернуть заявляемый элеватор, шарнирно подвешенный на штропах 23, в наклонное положение лицевой стороной корпуса 1 вниз, благодаря тому, что последний снабжен противовесом 21 (фиг.2), который противодействует смещению центра тяжести. Тем самым исключается необходимость вручную поворачивать элеватор на штропах 23 в рабочее положение и, следовательно, обеспечивается удобство его эксплуатации, снижаются трудозатраты и экономится время на выполнение спуско-подъемных операций с применением заявляемого элеватора.
После открытия створок 8 и 10 элеватора (фиг.3) в выемки 2 и 4 корпуса 1 заводят две трубы (две трубные колонны) 3 и 5 и створки 8 и 10 закрывают. Для этого работник, воздействуя на рукоятку 13 (фиг.6) и преодолевая сопротивление пружины 15, переводит рукоятку 13 в крайнее правое положение, одновременно поворачивая стопор 14 в открытое положение, а створку 10 из открытого положения в положение, при котором она перекрывает трубу 5 в выемке 4 (фиг.5), после чего отпускает рукоятку 13. Пружина 15, воздействуя на стопор 14, поворачивает его и заводит в радиусный паз 16, обеспечивая взаимодействие середины 22 дуги его опорной поверхности с ответной поверхностью радиусного паза 16. Одновременно с этим при повороте стопор 14, взаимодействуя с рычагом 12, возвращает рукоятку в крайнее левое положение. Поворотом защелки 20 стопор 14 фиксируется в закрытом положении, что гарантированно обеспечивает невозможность несанкционированного раскрытия створки 10. Одновременное и аналогичное выполнение перечисленных операций на правой стороне элеватора обеспечивает одновременный захват двух труб (двух колонн труб) и возможность проведения спуско-подъемных операций с ними, для чего элеватор поднимают на штропах 23 (фиг.1) вверх до посадки муфт (не показаны) трубных колонн 3 и 5 на опорные поверхности 6 и 7 (фиг.2) корпуса 1.
Таким образом, совокупность отличительных признаков заявляемого элеватора по сравнению с прототипом обеспечивает:
- возможность одновременного спуска-подъема в скважину двух колонн труб, что снижает аварийность выполнения спуско-подъемных операций благодаря исключению скручивания двух параллельных колонн труб и их заклинки и прихвата в стволе скважины,
- расширение эксплуатационных возможностей,
- повышение надежности, безопасности и удобства эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕВАТОР ДЛЯ СПУСКА И ПОДЪЕМА БУРИЛЬНЫХ ТРУБ | 2002 |
|
RU2235846C2 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ДВУХШТРОПНЫЙ | 2023 |
|
RU2816608C1 |
| Элеватор полуавтоматический для бурильных труб | 1985 |
|
SU1305298A1 |
| ЭЛЕВАТОР | 2010 |
|
RU2482258C2 |
| СПАЙДЕР ДВУХКОЛОННЫЙ | 2013 |
|
RU2517107C1 |
| Элеватор для бурильных и обсадных труб | 1977 |
|
SU692974A1 |
| ЭЛЕВАТОР | 2008 |
|
RU2414582C2 |
| Полуавтоматический элеватор для бурильных труб | 1983 |
|
SU1090843A1 |
| ЭЛЕВАТОР КОРПУСНОЙ | 2008 |
|
RU2414581C2 |
| ТРУБНЫЙ ЭЛЕВАТОР | 1996 |
|
RU2107147C1 |

Изобретение относится к оборудованию для нефтяной и газовой промышленности, а именно к устройствам для спуско-подъёмных операций с трубами при бурении, ремонте и освоении скважин. Элеватор для спуска-подъема двух колонн труб содержит корпус, на лицевой стороне которого выполнена радиусная выемка для трубы, створку, шарнирно соединенную с корпусом, и механизм фиксации створки. Также в корпусе на лицевой стороне выполнена дополнительная радиусная выемка для второй трубы, оснащенная дополнительной створкой, шарнирно соединенной с корпусом, и дополнительным механизмом фиксации дополнительной створки. С обратной стороны корпус оснащен противовесом. Механизм фиксации створки содержит поворотный рычаг управления с рукояткой, взаимодействующий с рычагом управления подпружиненный поворотный стопор створки, в закрытом положении взаимодействующий с радиусным пазом, центр которого в закрытом положении створки совпадает с центром оси поворота стопора створки, и подпружиненную поворотную защелку, взаимодействующую со стопором в закрытом положении створки. При этом радиусные выемки для труб, створки и механизмы их фиксации симметричны относительно поперечной оси корпуса, а расстояние между центрами радиусных выемок превышает диаметр муфт, соединяющих трубы. Подпружиненные поворотные защелки шарнирно закреплены на корпусе, поворотные рычаги управления с рукоятками и стопоры шарнирно установлены на створках и взаимодействуют между собой, радиусные пазы выполнены в стенке радиусных выемок. Линейные размеры в горизонтальной плоскости, перпендикулярной продольной оси, проходящей через центры радиусных выемок, в закрытом положении створок удовлетворяют соотношениям
L1<L2+R;
L2+R<L3+r;
h≥r/3,
где L1 - длина створки 10 от центра ее оси поворота до торца, В
взаимодействующего со стенкой радиусной выемки 4;
L2 - расстояние от центра оси створки 10 до центра радиусной выемки 4, выполненной в корпусе 1;
R - величина радиуса выемки 4;
L3 - расстояние между центрами осей створки 10 и стопора 14;
r - радиус дуги опорной поверхности стопора 14, равный радиусу
ответной поверхности паза 16, выполненного в корпусе 1;
h - глубина паза 16.
Причем угол β между линией, проходящей через центры осей створки и ее стопора, и линией, проходящей через центр оси стопора и через середину дуги его опорной поверхности, взаимодействующей с ответной поверхностью радиусного паза корпуса, в закрытом положении створки равен 45°. Техническим результатом является повышение надежности, безопасности, и расширение эксплуатационных возможностей элеватора корпусного для одновременного спуска-подъема двух колонн труб. 7 ил.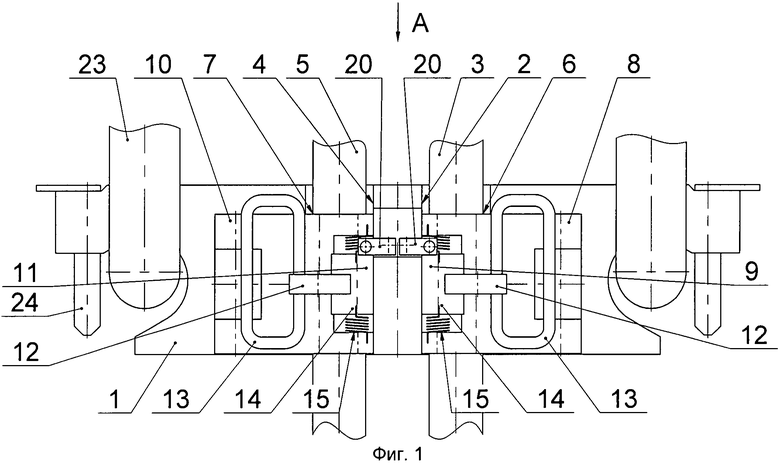
Элеватор для спуска-подъема двух колонн труб, содержащий
- корпус, на лицевой стороне которого выполнена радиусная выемка для трубы,
- створку, шарнирно соединенную с корпусом,
- и механизм фиксации створки, содержащий
- поворотный рычаг управления с рукояткой,
- взаимодействующий с рычагом управления подпружиненный поворотный стопор створки, в закрытом положении взаимодействующий с радиусным пазом, центр которого в закрытом положении створки совпадает с центром оси поворота стопора створки,
- и подпружиненную поворотную защелку, взаимодействующую со стопором в закрытом положении створки,
согласно изобретению
- корпус с обратной стороны дополнительно оснащен противовесом,
- в корпусе на лицевой стороне выполнена дополнительная радиусная выемка для второй трубы, оснащенная дополнительной створкой, шарнирно соединенной с корпусом, и дополнительным механизмом фиксации дополнительной створки,
- при этом радиусные выемки для труб, створки и механизмы их фиксации симметричны относительно поперечной оси корпуса,
- а расстояние между центрами радиусных выемок превышает диаметр муфт, соединяющих трубы,
- подпружиненные поворотные защелки шарнирно закреплены на корпусе,
- поворотные рычаги управления с рукоятками и стопоры шарнирно установлены на створках и взаимодействуют между собой,
- радиусные пазы выполнены в стенке радиусных выемок,
- а линейные размеры в горизонтальной плоскости, перпендикулярной продольной оси, проходящей через центры радиусных выемок, в закрытом положении створок удовлетворяют соотношениям
L1<L2+R;
L2+R<L3+r;
h≥r/3,
где L1 - длина створки 10 от центра ее оси поворота до торца, взаимодействующего со стенкой радиусной выемки 4;
L2 - расстояние от центра оси створки 10 до центра радиусной выемки 4, выполненной в корпусе 1;
R - величина радиуса выемки 4;
L3 - расстояние между центрами осей створки 10 и стопора 14;
r - радиус дуги опорной поверхности стопора 14, равный радиусу ответной поверхности паза 16, выполненного в корпусе 1;
h - глубина паза 16.
- причем угол β между линией, проходящей через центры осей створки и ее стопора, и линией, проходящей через центр оси стопора и через середину дуги его опорной поверхности, взаимодействующей с ответной поверхностью радиусного паза корпуса, в закрытом положении створки равен 45°.
| ЭЛЕВАТОР КОРПУСНОЙ | 2008 |
|
RU2414581C2 |
| Элеватор | 1982 |
|
SU1059120A1 |
| Элеватор для труб | 1985 |
|
SU1286729A1 |
| ПАХОТНЫЙ АГРЕГАТ | 1993 |
|
RU2044429C1 |
| ЭЛЕВАТОР | 2000 |
|
RU2171351C1 |
| ЭЛЕВАТОР ДЛЯ СПУСКА И ПОДЪЕМА БУРИЛЬНЫХ ТРУБ | 2002 |
|
RU2235846C2 |
| US 3884519 A, 20.05.1975 | |||
| US 4035012 A, 12.07.1977. | |||

