ли перемедаются по телам качения и шарнирно соединяются промежуточными тягами с копиром. Механизм 10 фикса- ,ции ЗЭ имеет две подпружиненные тяги для закрытия копира. Одна из них имеет в своей нижней части кольцевую проточку и вертикальную наклонную боковую и торцевую плоскости, В корпусе 2 шарнирно установлена втулка, подпружиненная пружиной толкателя в сторону оси элеватора. Во втулке размещен стопор, подпружиненный в сторону тяги и рукоятки. Стопор имеет
1
Изобретение относится к бурению скважин, а именно к устройствам для проведения спуско-подъемных операций с гладкоствольными бурильными трубами.
Целью изобретения является повышение надежности и безопасности работы путем фиксации захватных элементов при закрытом положении копира, а также снижение загрязнения захватных элементов.
На фиг.1 изображен элеватор, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - элеватор, вид сбоку; на фиг.4 - разрез Б-В на фиг.1 (механизм фиксации захватных элементов в верхнем положении); на фиг.З - то же, в нижнем положении; на фиг.6 - то же, в oтк шoчeннoм положении; на фиг,7 - узел Т на фиг.1 (захватный элемент в свободном положении); на фиг.8 - то же, момент захвата трубы: на фиг.9 - элеватор в процессе подъема по трубе; на фиг.ГО - взаимодействие механизма фиксации и тяги механизма управления при верхнем положении захватных элементов; на фиг.11 - то же, при нижнем положении захватных элементов; на фиг.12 - то же, в процессе подъема элеватора по трубе.
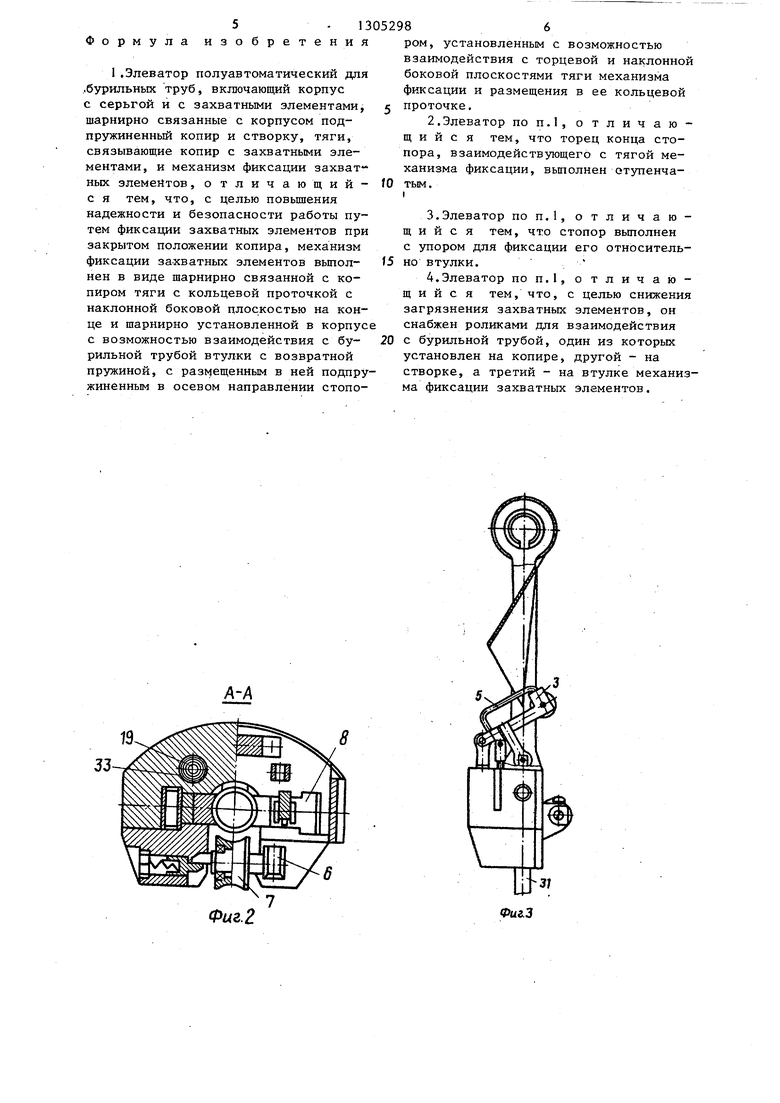
Элеватор полуавтоматический состоит из серьги 1,, корпуса 2, копира 3 с роликом 4 и рукояткой 5, съемной створки 6 с роликом 7, захватных элементов 8, механизма 9 управления захватными элементами и механизма 10 фиксации захватных элементов. Корпус 2 выполнен составным и включает корупор для фиксации в убранном внутрь втулки положении после поворота его на На втулке установлен ролик для взаимодействия с бурильной трубой 31. Стопор вьтолнен со ступенчатым торцом для взаимодействия с тягой. Труба 3 Г контактирует с тремя роликами элеватора: роликом 4 копира, дополнительным роликом створки и роликом втулки. Эти ролики центрируют трубу 31 в элеваторе и исключают воз можность задевания трубы 31 корпусом 2. 3 3.п. ф-лы, 12 ил.
пус и две щеки, на одной из которьк расположена створка 6, на другой - защелка для фиксации створки в закрытом положении.
Захватные элементы В представляют собой плащки 11, установленные в плащ- кодержателях 12, перемещающихся в корпусе 2 в Т-образных наклонных пазах по телам 13 качения и шарнирно соеo диненных промежуточными тягами 14 с копиром 3. Тела 13 качения размещены в сепараторах 15, которые подпружинены относительно плашкодержателей 12 с помощью пружин 16, причем тела 13
5 качения взаимодействуют с плашкодёр- жателями 12 и корпусом 2 через планки 17 и 18.
Механизм управления захватными элементами 9 щарнирно соединен с ко0 пиром 3 и имеет две подпружиненные в осевом направлении тяги 19 для закрытия копира 3, одна из которых имеет в своей нижней части кольцевую проточку 20 и вертикальную 21, наклонную
25 боковую 22 и торцевую 23 плоскости.
Механизм 10 фиксации захватных элементов состоит-из щарнирно установленной в корпусе 2 втулки 24, подпружиненной пружиной 25 толкателя 30 26 в сторону оси элеватора, стопора 2.7., размещенного во втулке 24, подпружиненного в сторону тяги 19 и рукоятки 28. Стопор 27 имеет упор 29 для фиксации в убранном внутрь
35 втулки 24 положении после поворота его на 90. На втулке установлен ролик 30 для взаимодействия с бурильной трубой 31. Кроме того, стопор
27 выполнен со ступенчатым торцом 32 для взаимодействия с тягой 19.
Устройство работает следующим образом.
При спуске колонны бурильных j труб в скважину копир 3 за рукоятку 5 отводят в крайнее положение. При этом захватные элементы 8 под дейстием промежуточных тяг 14 поднимаются вверх, а тяги 19 механизма 9 управле-fO НИН сжимают пружину 33 и перемещаются в верхнее положение. В этот моент втулка 24 под действием пружины толкателя 26 поворачивается в сторону оси элеватора, выводя ступен а- 15 тый торец 32 стопора 27 ниж е тяги 19, а ролик 30 - ближе к оси элеватора. После этого опускают рукоятку 5 копира 3, котор1 й остается в отвеенном положении, так как торцевая плоскость 23 опирается на стопор 27.
Затем элеватор с открытой створкой 6 наводят на трубу 31, стоящую на подсвечнике, и закрывают створку 6. При этом труба 31 нажимает на вы- ступающий внутрь корпуса 2 ролик 30 еханизма 10 фиксации, в результате чего втулка 24 утапливает толкатель 26, а стопор 27, поворачиваясь, освобождает тяги 19, которые поворачивают копир 3 до упора его роликом 4 в трубу 31, Таким образом, элеватор контактирует-с трубой 31 тремя роликами: роликом 4 копира 3, дополнитель20
5
30
ным роликом 7 створки 6 и роликом 30 механизма 10 фиксации, которые центрируют трубу 31 в элеваторе и исключают возможность задевания трубы 31 корпусом 2.
После этого элеватор перемещают вверх по трубе 31, при этом ролики 4, 7 и 30 перекатьюаются по трубе 31, что исключает собирание с нее грязи и глинистого раствора. В процессе перемещения элеватора стопор 27 под действием пружины 25 своим ступенчатым торцом 32 контактирует с вертикальной 21 и наклонной боковой 22 плоскостями тяги 19.
При сходе элеватора с верхнего конца бурильной трубы 31 копир 3 под действием пружины 33 закрывается и опускает захватные элементы 8, котоКопир 3 за рукоятку 5 отводят в крайнее положение, обеспечивая тем самым перемещение захватных элементов 8 в верхнее положение, и надевают элеватор на верхний конец колонны бурильных труб, установленной в трубо- держателе., Затем отпускают рукоятку 5, и копир 3, поворачиваясь под действием пружин 33, перемещает захватные 45 элементы 8 в нижнее положение, которые захватывают колонну за ее верхний Конец.
После этого колонну извлекают из 50 скважины. Отвинчивают трубу от колонны и устанавливают отвинченную трубу на подсвечник. В этом случае верхний конец трубы 31 поворачивает копир 3, который в свою очередь перемещает
рые захватывают трубу 31 за ее верх- 55захватные элементы 8 в верхнее полоний конец. При этч.м тяга 19 перемеща-жение. Освобожденный верхний конец ется в нижнее положение, а стопор 27трубы 31 отражателем серьги 1 отбрасы- под действием толкателя 26 заходитвается в свечеприемник, а элеватор в кольцевую npoTO4Kv 20, обеспечи-оЬускается вниз за следующей свечой.
j -fO 15
20
, 52984
вая тем самым фиксацию захватных элементов 8 и копира 3 в нижнем положении. Под действием осевой нагрузки плашкодержатель 12 перемещается 5 по телам 13 качения и сжимает пружину 1 6.
. Затем трубу 31 соединяют с колонной труб, установленной в трубодержа- теле, и опускают ее в скважину. В случае попадания колонны на уступ в скважине элеватор не перемещается вниз, так как копир 3 зафиксирован в закрытом положении, и, следовательно, исключается возможность выскальзывания колонны в случае ее срыва с уступа и падения в скважину.
После спуска в скважину ее захва- тьшают трубодержателем. Затем открывают створку 6, за рукоятку 28 выводят стопор 27 из кольцевой проточки 20 тяги 19, за рукоятку 5 поворачивают копир 3, поднимая захватные элементы 8 в верхнее положение, и снимают элеватор с колонны труб. При этом пружины I6 возвращают сепаратор 15 с телами 13 качения в исходное (нижнее) положение.
Перед началом подъема колонны бурильных труб из скважины снимают створку 6 и отключают механизм 10 фиксации. Для этого стопор 27 за рукоятку 28 утапливают во втулку 24 и поворачивают на 90 , в результате чего упор 29 фиксирует стопор 27 в убранном положении.
Копир 3 за рукоятку 5 отводят в крайнее положение, обеспечивая тем самым перемещение захватных элементов 8 в верхнее положение, и надевают элеватор на верхний конец колонны бурильных труб, установленной в трубо- держателе., Затем отпускают рукоятку 5, и копир 3, поворачиваясь под действием пружин 33, перемещает захватные 45 элементы 8 в нижнее положение, которые захватывают колонну за ее верхний Конец.
30
35
40
После этого колонну извлекают из скважины. Отвинчивают трубу от колонны и устанавливают отвинченную трубу на подсвечник. В этом случае верхний конец трубы 31 поворачивает копир 3, который в свою очередь перемещает
Формула изобретения
1.Элеватор полуавтоматический для ..бурильных труб, включающий корлус с серьгой и с захватными элементами, шарнирно связанные с корпусом подпружиненный копир и створку, тяги, связывающие копир с захватными элементами, и механизм фиксации захватных элементов, отличаю щий- с я тем, что, с целью повьшения надежности и безопасности работы путем фиксации захватных элементов при закрытом положении копира, механизм фиксации за-хватных элементов выполнен в виде шарнирно связанной с копиром тяги с кольцевой проточкой с наклонной боковой плоскостью на конце и шарнирно установленной в корпус с возможностью взаимодействия с бу- рильной трубой втулки с возвратной пружиной, с размещенным в ней подпружиненным в осевом направлении стопо
ром, установленным с возможностью взаимодействия с торцевой и наклонной боковой плоскостями тяги механизма фиксации и размещения в ее кольцевой проточке.
2.Элеватор поп.1, отличающийся тем, что торец конца стопора, взаимодействзтощего с тягой механизма фиксации, выполнен отупенча20
fO тым.
3.Элеватор поп.1, отличающийся тем, что стопор выполнен с упором для фиксации его относительно втулки.
4.Элеватор поп.1,отличаю- щ и и с я тем, что, с целью снижения загрязнения захватных элементов, он снабжен роликами для взаимодействия с бурильной трубой, один из которых установлен на копире, другой - на створке, а третий - на втулке механизма фиксации захватных элементов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Элеватор полуавтоматический | 1981 |
|
SU976013A1 |
| Полуавтоматический элеватор для бурильных труб | 1983 |
|
SU1090843A1 |
| Буровая установка | 1982 |
|
SU1046467A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЭЛЕВАТОР | 1967 |
|
SU194699A1 |
| Элеватор | 1987 |
|
SU1460185A1 |
| СПАЙДЕР ДВУХКОЛОННЫЙ | 2013 |
|
RU2517107C1 |
| Элеватор | 1984 |
|
SU1208172A1 |
| ЭЛЕВАТОР ДЛЯ СПУСКА-ПОДЪЕМА ДВУХ КОЛОНН ТРУБ | 2012 |
|
RU2507369C1 |
| Полуавтоматический элеватор | 1983 |
|
SU1266957A1 |
| БУРОВАЯ УСТАНОВКА | 1995 |
|
RU2100565C1 |



Изобретение относится к механизмам для бурения скважин, предназначено для проведения спуско-подъемных операций с гладкоствольными бурильными трубами и позволяет повысить надежность и безопасность работы элеватора путем фиксации захватных элементов при закрытом положении копира, а также снизить загрязнение захватных элементов (33). ЗЭ представляют собой плашки в плашкодержателях, перемещающихся в корпусе 2 в Т-образных наклонных пазах. Плашкодержате(Л со о ел ю со оо 
А-Д
19
Фиг.2
25
ff-S
25
а
28
Фиг. 6
Фи&.7
Фиг. 8
Фаг.5
Фиг.Ю
Составитель А.Сергачев Редактор Н.Лазаренко Техред В.Кадар Корректор А. Зимокосов
Заказ 1393/27 Тираж 533Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. IZ
| ПОЛУАВТОМАТИЧЕСКИЙ ЭЛЕВАТОР12 | 1972 |
|
SU419616A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Элеватор полуавтоматический | 1981 |
|
SU976013A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Полуавтоматический элеватор | 1983 |
|
SU1266957A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
