Область техники
Настоящее изобретение относится к технологии предоставления информации о местоположении. Более конкретно, настоящее изобретение относится к технологии предоставления информации о местоположении, даже в среде, препятствующей проникновению сигнала, излученного со спутника, который излучает сигнал определения местоположения.
Предшествующий уровень техники
В качестве традиционной системы определения местоположения известна глобальная система определения местоположения (GPS). Спутник для излучения сигнала для использования в GPS (спутник и сигнал будут далее упоминаться как «GPS спутник» и «GPS сигнал», соответственно) летит на высоте примерно двадцать тысяч километров от земли. Любой пользователь имеет возможность принимать сигнал, излученный от GPS спутника, чтобы измерять расстояние между GPS спутником и пользователем посредством демодуляции принятого сигнала. Таким образом, если нет препятствия между землей и GPS спутником, определение местоположения может быть выполнено с использованием сигнала, излученного с GPS спутника. Однако в случаях, когда GPS используется, например, в городской области, множество зданий часто создают препятствие, вызывая ситуацию, когда устройство для обеспечения информации о местоположении пользователя не может принять сигнал, излученный от GPS спутника. Кроме того, в зависимости от условий, дифракция или отражение сигнала часто возникают вследствие зданий, вызывая ошибку в измерении расстояния с использованием сигнала, что приводит к искажению точности определения местоположения.
Хотя имеется метод приема в области внутри помещений слабого GPS сигнала, который проникает через стену или крышу, состояние приема остается нестабильным, что вызывает искажение точности определения местоположения.
Хотя приведенное выше описание относится к определению местоположения на примере GPS, вышеописанные явления наблюдаются в общем случае в спутниковой системе определения местоположения. Как используется здесь, термин «спутниковая система определения местоположения» означает любой тип спутниковой системы определения местоположения, включая GLONASS (глобальная навигационная спутниковая система) в Российской Федерации, Galileo в Европе и GPS.
Метод, относящийся к системе обеспечения информации о местоположении, раскрыт, например, в JP 2006-67086А (патентный документ 1).
Однако в методе, раскрытом в JP 2006-67086А, существует проблема, состоящая в недостаточной гибкости, поскольку считывающее устройство или записывающее устройство является единственным в качестве элемента системы обеспечения информации о местоположении. Более того, ввиду необходимости ограничения выходного сигнала передатчика, чтобы избежать взаимных помех, дальность приема информации о местоположении ограничена, что вызывает проблему, состоящую в невозможности непрерывного получения информации о местоположении, или требуется очень большое число передатчиков, чтобы покрыть широкий диапазон.
В обычном мобильном телефоне, поддерживающем функцию определения местоположения, информация о местоположении может быть получена в местоположении, где имеется возможность принимать сигнал от спутника, так что можно уведомлять о местоположении мобильного телефона. Однако в местоположении, где невозможно принимать радиоволны, таком как внутренняя область здания или подземный торговый центр, имеется проблема, состоящая в невозможности получения информации о местоположении.
В качестве меры для решения этой проблемы рассматривается метод, который предусматривает размещение во внутренней области множества передатчиков, каждый из которых может излучать сигнал, подобный GPS сигналу, чтобы вычислять местоположение на основе принципа трилатерации, как в GPS. Однако в этом случае имеется проблема, состоящая в увеличении стоимости передатчиков ввиду необходимости обеспечения того, чтобы время соответствующих часов в передатчиках было синхронизировано друг с другом.
Кроме того, распространение радиоволн становится более сложным, ввиду отражения во внутренней области, что вызывает другую проблему, состоящую в том, что возникает ошибка порядка нескольких десятков метров, несмотря на установку таких дорогостоящих передатчиков.
JP 2007-278756 A (патентный документ 2) раскрывает систему обеспечения информации о местоположении, способную непрерывно получать информацию о местоположении в областях внутренней установки и во внешней области, причем собственно информация о местоположении (широта, долгота, высота и т.п.), относящаяся к местоположению установки передатчика внутренней установки, передается в том же самом формате, что и обычный формат сигнала от GPS спутника, и обычная конфигурация для определения местоположения на основе GPS спутников используется в качестве аппаратных средств GPS приемника без модификации.
Патентный документ 1: JP 2006-67086А
Патентный документ 2: JP 2007-278756A
Раскрытие изобретения
Задачи, решаемые изобретением
Таким образом, имеется возрастающая потребность в точном получении информации о местоположении в областях как внешней, так и внутренней установки.
Более конкретно, в отношении получения или оповещения об информации о местоположении, например, в телефоне стационарной линии, местоположение вызывающего абонента может идентифицироваться вызовом, посланным с телефона стационарной линии, поскольку местоположение его установки предварительно известно. Однако ввиду широкого распространения мобильных телефонов, мобильная связь становится все более популярной. Таким образом, часто оказывается невозможным сообщить информацию о местоположении вызывающего абонента тем же способом, как в случае телефона стационарной линии. Кроме того, что касается сообщения в чрезвычайной ситуации, в настоящее время поддерживается разработка законов, предусматривающих включение информации о местоположении в сообщение с мобильного телефона.
Однако в случаях, где передатчик внутренней установки используется для предоставления информации о местоположении на устройство обеспечения информации о местоположении, например, мобильный телефон, имеющий функцию определения местоположения, не точно ясно, в сигнальном формате какого типа должен передаваться сигнал, чтобы позволить подавить ошибки в синхронизации и захвате сигнала.
В области внутренней установки, по сравнению с сигналом от спутника, может передаваться сигнал, имеющий достаточную интенсивность. Таким образом, ожидается, что синхронизация и захват могут выполняться в более короткий интервал времени, чем интервал для сигнала от спутника. Однако имеется проблема, состоящая в том, что не точно ясно, какой формат сигнала подходит для этого.
Поэтому имеется потребность в системе, способной обеспечивать информацию о местоположении без ухудшения точности даже в местоположении, где невозможно принимать радиоволны от спутника, который излучает сигналы для определения местоположения.
Также имеется потребность в системе, способной снижать стоимость передатчика, предназначенного для излучения сигнала для определения местоположения.
Также имеется потребность в системе обеспечения информации о местоположении, способной снижать время, требуемое для получения информации о местоположении.
Поэтому имеется другая потребность в передатчике внутренней установки, способном передавать сигнал для обеспечения информации о местоположении, без ухудшения точности даже в местоположении, где невозможно принимать радиоволны от спутника, который излучает сигналы для определения местоположения.
Также имеется потребность в передатчике внутренней установки, способном снижать стоимость передатчика внутренней установки, предназначенного для передачи сигнала для определения местоположения.
Также имеется потребность в передатчике внутренней установки, способном снижать время, требуемое для получения информации о местоположении.
Средства для решения задачи
Согласно первому аспекту настоящего изобретения, предложена система обеспечения информации о местоположении, способная предоставлять информацию о местоположении с использованием первого сигнала определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников. Система обеспечения информации о местоположении содержит передатчик внутренней установки и устройство обеспечения информации о местоположении. Передатчик внутренней установки содержит запоминающее устройство, которое хранит данные местоположения для идентификации местоположения установки передатчика внутренней установки, блок генерации для генерации, в виде сигнала расширенного спектра, второго сигнала определения местоположения, содержащего данные местоположения, и передающий блок для передачи сгенерированного сигнала расширенного спектра. Устройство обеспечения информации о местоположении содержит приемный блок для приема сигнала расширенного спектра, блок идентификации для того, чтобы на основе множества кодовых комбинаций, связанных с первым и вторым сигналами определения местоположения, идентифицировать одну из кодовых комбинаций, которая соответствует сигналу расширенного спектра, принятому приемным блоком, блок определения для того, чтобы на основе сигнала, полученного демодуляцией принятого сигнала расширенного спектра с использованием кодовой комбинации, идентифицированной блоком идентификации, определять, какой из первого и второго сигналов определения местоположения принят, блок получения информации о местоположении для получения информации о местоположении устройства обеспечения информации о местоположении, при переключении между режимами обработки в зависимости от результата определения, и блок вывода для вывода информации о местоположении, полученной блоком получения информации о местоположении. Второй сигнал определения местоположения конфигурирован для повторения сообщения того же самого содержания в цикле, более коротком, чем у первого сигнала определения местоположения.
Предпочтительным образом, второй сигнал определения местоположения содержит множество кадров, каждый из которых включает в себя множество слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем число слов, включенных в каждый из кадров, установлено переменным, и слова, образующие каждый из кадров, включают в себя слово, имеющее идентификационную информацию, указывающую количество слов, образующих кадр.
Предпочтительным образом, второй сигнал определения местоположения содержит множество кадров, каждый из которых включает в себя множество слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем первое одно из слов в каждом из кадров включает в себя преамбулу для установления синхронизации кадров при приеме, а остальные слова, иные чем, по меньшей мере, первое слово, в каждом из кадров, включают в себя данные отсчета, которые обновляются каждый раз, когда генерируются данные слова.
Предпочтительным образом, первый сигнал определения местоположения содержит множество первых кадров, каждый из которых включает в себя множество первых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из первых кадров включает в себя первую преамбулу для установления синхронизации кадров при приеме.
Кроме того, предпочтительным образом, второй сигнал определения местоположения содержит множество вторых кадров, каждый из которых включает в себя множество вторых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из вторых кадров включает в себя вторую преамбулу для установления синхронизации кадров при приеме, и причем вторая преамбула имеет структуру, отличающуюся от структуры первой преамбулы.
Предпочтительным образом, блок получения информации о местоположении действует, когда второй сигнал определения местоположения передан передатчиком внутренней установки, чтобы получать данные местоположения из сигнала, полученного путем демодуляции, и, когда принято множество первых сигналов определения местоположения без приема второго сигнала определения местоположения, чтобы вычислять информацию о местоположении на основе множества принятых сигналов расширенного спектра.
Предпочтительным образом, устройство обеспечения информации о местоположении приспособлено, чтобы осуществлять связь с устройством связи для обеспечения относящейся к местоположению информации, ассоциированной с идентификационными данными, через линию связи, и блок получения информации о местоположении действует, когда приемный блок принимает второй сигнал определения местоположения, чтобы осуществлять связь с устройством связи на основе идентификационных данных, для получения относящейся к местоположению информации, ассоциированной с идентификационными данными.
Согласно второму аспекту настоящего изобретения, предусмотрен передатчик внутренней установки, способный обеспечивать информацию о местоположении с использованием первого сигнала определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников, и второго сигнала определения местоположения, совместимого с первым сигналом определения местоположения. Передатчик внутренней установки содержит первое запоминающее устройство, которое хранит данные местоположения для идентификации местоположения установки передатчика внутренней установки, блок генерации для генерации, в виде сигнала расширенного спектра, второго сигнала определения местоположения, содержащего данные местоположения, и передающий блок для передачи сгенерированного сигнала расширенного спектра, причем блок генерации приспособлен для генерации второго сигнала определения местоположения таким образом, чтобы повторять сообщение того же содержания в цикле более коротком, чем у первого сигнала определения местоположения.
Предпочтительным образом, в передатчике внутренней установки, первый сигнал определения местоположения содержит множество первых кадров, каждый из которых включает в себя множество первых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из первых кадров включает в себя первую преамбулу для установления синхронизации кадров при приеме, и второй сигнал определения местоположения содержит множество вторых кадров, каждый из которых включает в себя множество вторых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из вторых кадров включает в себя вторую преамбулу для установления синхронизации кадров при приеме, и причем вторая преамбула имеет структуру, отличающуюся от структуры первой преамбулы.
Предпочтительным образом, в передатчике внутренней установки, блок генерации включает в себя идентификационные данные, ассоциированные с относящейся к местоположению информацией.
Согласно третьему аспекту настоящего изобретения, предложен способ обеспечения информации о местоположении с использованием первого сигнала определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников. Способ содержит этап загрузки данных местоположения для идентификации местоположения установки передатчика внутренней установки; этап генерации второго сигнала определения местоположения, включающего в себя данные местоположения, в виде сигнала расширенного спектра; этап передачи сгенерированного сигнала расширенного спектра; этап приема переданного сигнала расширенного спектра; этап идентификации, на основе множества кодовых комбинаций, связанных с первым и вторым сигналами определения местоположения, одной из кодовых комбинаций, которая соответствует принятому сигналу расширенного спектра; этап определения, на основе сигнала, полученного демодуляцией принятого сигнала расширенного спектра с использованием идентифицированной кодовой комбинации, какой из первого и второго сигналов определения местоположения принят; этап получения информации о местоположении при переключении между режимами обработки, в зависимости от результата определения; и этап вывода полученной информации о местоположении, причем второй сигнал определения местоположения генерируется таким образом, чтобы повторять сообщение того же содержания в цикле более коротком, чем у первого сигнала определения местоположения.
Краткое описание чертежей
Фиг.1 - диаграмма, показывающая конфигурацию системы обеспечения информации о местоположении согласно первому варианту осуществления настоящего изобретения.
Фиг.2 - блок-схема, показывающая конфигурацию аппаратных средств передатчика 200-1 внутренней установки.
Фиг.3 - диаграмма, концептуально показывающая один режим хранения данных в EEPROM 243, обеспеченном в передатчике 200-1 внутренней установки.
Фиг.4 - диаграмма, показывающая структуру сигнала C/A кода L1-полосы, излучаемого передатчиком, установленным на GPS спутнике.
Фиг.5 - диаграмма, показывающая структуру кадра сигнала IMES (внутренняя система передачи сообщений).
Фиг.6 - таблица, показывающая сравнение между значением MID (идентификатор (ID) типа сообщения) и длиной/содержимым кадра.
Фиг.7 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “000”.
Фиг.8 - таблица, показывающая соответствующие примеры содержимого данных в кадре, соответствующие значения битовой длины и LSB (младший бит) и выражаемый диапазон.
Фиг.9 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “001”.
Фиг.10 - таблица, показывающая соответствующие примеры содержимого данных в кадре, соответствующие значения битовой длины и LSB и выражаемый диапазон.
Фиг.11 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “011”.
Фиг.12 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “100”.
Фиг.13 - блок-схема, показывающая конфигурацию аппаратных средств устройства 100 обеспечения информации о местоположении.
Фиг.14 - блок-схема, показывающая этапы обработки, которая будет выполняться устройством 100 обеспечения информации о местоположении.
Фиг.15 - диаграмма, показывающая экранное изображение на дисплейном блоке 440 устройства 100 обеспечения информации о местоположении.
Фиг.16 - блок-схема, показывающая конфигурацию устройства 1000 обеспечения информации о местоположении согласно первому модифицированному варианту осуществления настоящего изобретения.
Фиг.17 - диаграмма, показывающая состояние использования устройства обеспечения информации о местоположении согласно второму модифицированному варианту осуществления настоящего изобретения.
Фиг.18 - блок-схема, показывающая конфигурацию аппаратных средств мобильного телефона 1200 во втором модифицированном варианте осуществления.
Фиг.19 - блок-схема, показывающая конфигурацию аппаратных средств сервера 1230 обеспечения информации во втором модифицированном варианте осуществления.
Фиг.20 - диаграмма, показывающая структуру кадра модифицированного IMES сигнала.
Фиг.21 - диаграмма, показывающая структуру кадра модифицированного IMES сигнала, когда ID типа сообщения равен “000”.
Фиг.22 - таблица, показывающая соответствующие примеры содержимого данных, соответствующие значения битовой длины и LSB и выражаемый диапазон.
Фиг.23 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “001”.
Фиг.24 - таблица, показывающая соответствующие примеры содержимого данных, битовую длину, соответствующее значение LSB и представляемый диапазон, в каждом кадре.
Фиг.25 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “011”.
Фиг.26 - диаграмма, показывающая структуру кадра, когда ID типа сообщения равен “100”.
Объяснение кодов
10: система 10 обеспечения информации о местоположении
110, 111, 112: GPS спутник
120, 121, 122: передатчик
100-1, 100-2, 100-3, 100-4, 1000, 1160, 1170: устройство обеспечения информации о местоположении
130: здание
200-1, 200-2, 200-3, 1110, 1120, 1130, 1210: передатчик внутренней установки
210: радиоинтерфейс
220: порт внешней синхронной линии связи
221: порт внешнего тактового сигнала
230: блок ввода/вывода опорного тактового сигнала
240: блок цифровой обработки
250: аналоговый блок
1010, 1308: антенна
1140, 1150: область
1220: Интернет
1380: карта памяти
1462: CD-ROM
Лучший режим осуществления изобретения
Со ссылкой на чертежи настоящее изобретение будет далее описано на основе его варианта осуществления. В последующем описании общая ссылочная позиция или код относятся к тем же самым элементам или компонентам. Такие элементы или компоненты имеют то же самое наименование и функцию. Таким образом, дублированное детальное их описание будет опущено.
Первый вариант осуществления
Со ссылкой на Фиг.1 будет описана система 10 обеспечения информации о местоположении согласно первому варианту осуществления настоящего изобретения. На Фиг.1 представлена диаграмма, показывающая конфигурацию системы 10 обеспечения информации о местоположении. Система 10 обеспечения информации о местоположении содержит множество GPS (Система глобального позиционирования) спутников 110, 111, 112, 113, каждый из которых излучает сигнал для определения местоположения (далее "сигнал определения местоположения"), летящих на высоте приблизительно двадцати тысяч км от земли, и множество устройств 100-1 - 100-5 обеспечения информации о местоположении. Когда каждое из устройств 100-1 - 100-5 обеспечения информации о местоположении будет описываться в общем, оно будет упоминаться как "устройство 100 обеспечения информации о местоположении". Например, устройство обеспечения информации о местоположении может быть терминалом, имеющим обычный блок определения местоположения, таким как мобильный телефон, портативная автомобильная навигационная система или другое устройство определения местоположения мобильного объекта.
Как используется здесь, термин "сигнал определения местоположения" означает "сигнал расширенного спектра", например, так называемый "GPS сигнал". Однако сигнал местоположения не ограничен GPS сигналом. Хотя следующее описание будет сделано на основе одного примера, где GPS используется в качестве системы определения местоположения, для простоты объяснения, настоящее изобретение также применимо к любой другой спутниковой системе определения местоположения (такой как Galileo или QZSS (квази-зенитная спутниковая система)).
Например, центральная частота сигнала местоположения может составлять 1575,42 МГц. Например, расширенная частота сигнала местоположения может составлять 1.023 МГц. В этом случае, частота сигнала определения местоположения становится равной частоте сигнала C/A (грубого сопровождения) в существующей GPS LI полосе. Таким образом, входной каскад существующей схемы приема сигнала определения местоположения (например, схемы приема GPS сигнала) может быть переведен на другой канал, так что устройство обеспечения информации о местоположении становится способным принимать сигнал определения местоположения только путем изменения программного обеспечения для обработки сигнала из входного каскада, не добавляя новых схем аппаратных средств.
Сигнал местоположения может модулироваться прямоугольным колебанием на 1,023 МГц. В этом случае, например, если канал данных тот же самый, что и канал сигнала определения местоположения, который заново запланирован для передачи в LI полосе, пользователь может принять сигнал позиционирования (определения местоположения), используя приемник, способный принимать и обрабатывать новый GPS сигнал. Частота прямоугольного колебания предпочтительно равна 1.023 МГц. Частота для модуляции может быть установлена с учетом спектрального разделения, чтобы избежать взаимных помех с другими сигналами.
Передатчик 120 установлен на GPS спутнике 110, чтобы излучать сигнал определения местоположения. Далее, передатчик (121, 122, 123) подобный передатчику 120, установлен на каждом из GPS спутников 111, 112, 113.
Каждое из устройств 100-2, 100-3, 100-4 обеспечения информации о местоположении, имеющее ту же самую функцию, что и функция устройства 100-1 обеспечения информации о местоположении, может использоваться в местоположении, куда радиоволнам трудно проникнуть, например, в здании 130 или подземном торговом центре, как описано ниже.
В здании 130 передатчик 200-1 внутренней установки присоединен к потолку 1-го этажа здания 130. Устройство 100-4 обеспечения информации о местоположении действует для приема сигнала определения местоположения, излучаемого передатчиком 200-1 внутренней установки. Тем же самым образом, два передатчика 200-2, 200-3 внутренней установки прикреплены к потолкам 2-го и 3-го этажей здания 130, соответственно. Каждый из передатчиков 200-1 - 200-3 внутренней установки действует для передачи от него информации для непосредственной идентификации местоположения установки передатчика внутренней установки, как описано ниже.
В зоне подземного торгового центра множество передатчиков 200-4 - 200-6 внутренней установки закреплены на его потолке. Устройство 100-5 обеспечения информации о местоположении действует для приема сигнала определения местоположения от каждого из передатчиков 200-4 - 200-6 внутренней установки. В этом случае каждый из передатчиков 200-4 - 200-6 внутренней установки также действует для передачи от него информации, непосредственно идентифицирующей местоположение установки передатчика внутренней установки, как описано ниже.
Альтернативно, например, может быть использована конфигурация, в которой локальный сервер 204 установлен в зоне подземного торгового центра, и каждый из передатчиков 200-4 - 200-6 внутренней установки действует для передачи от него идентификационной информации, ассоциированной с местоположением установки передатчика внутренней установки (т.е. информации для косвенной идентификации местоположения установки передатчика внутренней установки), вместо собственно местоположения установки передатчика внутренней установки, как описано ниже. Кроме того, устройство 100-5 обеспечения информации о местоположении может быть конфигурировано для посылки запроса об относящейся к местоположению информации, эквивалентной идентификационной информации, на локальный сервер 204 через базовую станцию 202 и сеть (например, сеть мобильной телефонной связи). В здании 130 может использоваться конфигурация, приспособленная для посылки запроса об относящейся к местоположению информации на локальный сервер.
В случаях, когда множество передатчиков внутренней установки установлены на том же самом этаже зоны подземного торгового центра, интенсивность выходного сигнала каждого из передатчиков внутренней установки может регулироваться, чтобы ограничить размер зоны, покрываемой одним из передатчиков внутренней установки. Это позволяет устранить необходимость в увеличении интенсивности сигнала, передаваемого от каждого из передатчиков внутренней установки, и облегчить настройку мощности передачи на значение равное или меньше, чем предусматриваемое законом или нормами, регулирующими использование радиоволн, например Radio Law в Японии, так что специальная авторизация установки становится ненужной.
В первом варианте осуществления время часов каждого из передатчиков 200-1, 200-2, 200-3 внутренней установки или передатчиков 200-4, 200-5, 200-6 внутренней установки (время часов будет в дальнейшем упоминаться как "земное время") и время часов каждого из GPS спутников 110, 111, 112, 113 (время часов будет в дальнейшем упоминаться как "спутниковое время") могут быть независимыми одно от другого, то есть не требуется, чтобы земное время и спутниковое время были синхронизированными друг с другом. Однако спутниковые времена часов GPS спутников должны быть синхронизированными друг с другом. Таким образом, каждое из спутниковых времен контролируется атомными часами, установленными на соответствующем из GPS спутников. Согласно потребности, земные времена как времена часов передатчиков 200-1, 200-2, 200-3 внутренней установки могут быть предпочтительно синхронизированы друг с другом.
Сигнал расширенного спектра, который должен излучаться как сигнал местоположения от каждого из передатчиков GPS спутников, генерируется путем модуляции навигационного сообщения PRN (псевдошумовым) кодом. Навигационное сообщение содержит данные времени часов, орбитальные данные, данные альманаха и данные ионосферной коррекции. Каждый из передатчиков 120-123 также хранит данные (PRN-ID (идентификационные данные)) для идентификации передатчика (120-123) непосредственно или GPS спутника, на котором установлен передатчик (120-123).
Устройство 100 обеспечения информации о местоположении содержит данные и генератор кода для генерации множества типов псевдошумовых кодов. Устройство 100 обеспечения информации о местоположении действует, в ответ на прием сигнала определения местоположения, чтобы выполнять описанную ниже обработку демодуляции, используя комбинацию псевдошумового кода, назначенную соответствующему одному из передатчиков спутников или соответствующему одному из передатчиков внутренней установки, чтобы идентифицировать, от какого из спутников или передатчиков внутренней установки излучается принимаемый сигнал. PRN-ID включен в данные L1C сигнала как один тип сигнала определения местоположения, чтобы предотвратить захват/отслеживание сигнала с использованием ошибочной кодовой комбинации, что может произойти, когда уровень приема низок. В противоположность этому, PRN-ID не включен в L1C/А сигнал существующей GPS.
Передатчик, установленный на GPS спутнике
Конфигурация передатчика, который должен устанавливаться на GPS спутнике, известна. Таким образом, только схема конфигурации передатчика, установленного на GPS спутнике, будет описана ниже. Каждый из передатчиков 120, 121, 122, 123 содержит атомные часы, запоминающее устройство для хранения данных, схему осциллятора, схему обработки для формирования сигнала позиционирования (определения местоположения), схему кодирования для того, чтобы подвергнуть сигнал, сформированный схемой обработки, кодированию расширения спектра, и передающую антенну. Запоминающее устройство хранит навигационное сообщение, включая данные эфемерид, данные альманаха соответствующего одного из GPS спутников и данные ионосферной коррекции и PRN-ID.
Схема обработки действует для формирования исходящего сообщения с использованием информации времени часов от атомных часов и данных, сохраненных в запоминающем устройстве.
В передатчиках 120-123 комбинация псевдошумового кода для кодирования с расширением спектра предварительно определена для каждого передатчика. Иными словами, кодовая комбинация отличается от передатчика к передатчику (то есть, от GPS спутника к GPS спутнику). Схема кодирования действует для расширения спектра сообщения, используя вышеупомянутый псевдошумовой код. Каждый из передатчиков 120 - 123 действует, чтобы преобразовывать кодированный сигнал в высокочастотный сигнал и излучать преобразованный сигнал во внешнее пространство через передающую антенну.
Вышеуказанным образом каждый из передатчиков 120-123 излучает сигнал расширенного спектра, не вызывающий взаимных помех сигналам остальных передатчиков. Отсутствие вредных взаимных помех может быть гарантировано уровнем выходного сигнала, ограниченным в такой степени, чтобы не вызывать взаимных помех. Альтернативно, это может также быть достигнуто методами спектрального разделения. Сигнал расширенного спектра передается посредством несущей, например, "LI полосы". Например, каждый из передатчиков 120, 121, 122, 123 может быть конфигурирован, чтобы излучать сигнал определения местоположения, имеющий ту же самую частоту, согласно схеме связи расширенного спектра. Таким образом, даже если соответствующие сигналы определения местоположения, переданные от спутников, принимаются тем же самым одним (например, 100-1) из устройств обеспечения информации о местоположении, они могут приниматься, не вызывая взаимных помех друг с другом.
Во внешней области устройство 100-1 обеспечения информации о местоположении может получать информацию трехмерного местоположения, например, широту, долготу и высоту путем одновременного приема сигналов определения местоположения от четырех спутников.
В отношении сигнала определения местоположения от передатчика внутренней установки на земле, каждый из сигналов от множества передатчиков внутренней установки может приниматься, не вызывая взаимных помех остальным сигналам, таким же способом, как в случае сигналов, переданных от спутников.
Конфигурация аппаратных средств передатчика 200-1 внутренней установки
Со ссылкой на Фиг.2 ниже описывается передатчик 200-1 внутренней установки. Фиг.2 является блок-схемой, показывающей конфигурацию аппаратных средств передатчика 200-1 внутренней установки.
Передатчик 200-1 внутренней установки содержит радио-(беспроводный) интерфейс (далее упоминаемый как "радио-I/F") 210, блок 240 цифровой обработки, блок 230 ввода/вывода опорного тактового сигнала (далее упоминаемый как "блок I/O опорного тактового сигнала"), электрически соединенный с блоком 210 цифровой обработки, для подачи опорного тактового сигнала для работы каждой секции схемы, блок 250 аналоговой обработки, электрически соединенный с блоком 210 цифровой обработки, антенну (не показана), электрически соединенную с блоком 250 аналоговой обработки, для передачи сигнала определения местоположения и блок питания (не показан) для подачи потенциала электропитания на каждую секцию передатчика 200-1 внутренней установки.
Источник питания может быть включен в передатчик 200-1 внутренней установки, или передатчик 200-1 внутренней установки может конфигурироваться, чтобы получать электропитание извне.
Интерфейс радиосвязи
Радио-I/F 210 является радио-(беспроводным) интерфейсом связи и предназначен для приема внешней команды и приема и, в случае необходимости, данных передачи о параметре настройки и программы (программно-аппаратного обеспечения и т.д.) от внешней стороны и к внешней стороне посредством связи в ближней зоне, такой как Bluetooth, или радиосвязи, такой как PHS (Персональная телефонная система), или мобильной телефонной сети.
На основе радио-I/F 210, передатчик 200-1 внутренней установки имеет возможность изменять параметр настройки, например, данные местоположения (данные, указывающие на местоположение установки передатчика 200-1 внутренней установки), подлежащие передаче от передатчика 200-1 внутренней установки, или изменять встроенное программное обеспечение в соответствии с отличающейся схемой связи, даже после того, как он установлен на потолке и т.п. во внутренней области.
В первом варианте осуществления предполагается, что интерфейс является беспроводным. Альтернативно, в случаях, где проводной интерфейс выгоден, даже с учетом затрат времени/рабочей силы на проводку к местоположению установки и установку и т.д., интерфейс может быть проводным.
Блок цифровой обработки
Блок 240 цифровой обработки содержит процессор 241, который действует, согласно команде от радио-I/F 210 или согласно программе, чтобы управлять работой передатчика 200-1 внутренней установки; RAM (память произвольного доступа) 242, которая хранит программу, выполняемую процессором 241 и установлена в процессоре 241; EEPROM (электронно-стираемая программируемая постоянная память) 243 для хранения параметра настройки и т.п. в качестве части данных от радио-I/F 210; программируемую пользователем вентильную матрицу (далее FPGA) 245, которая действует, под управлением процессора 241, для формирования сигнала базовой полосы, который будет передаваться передатчиком 200-1 внутренней установки; EEPROM 244 для хранения встроенного программного обеспечения FPGA 245, в качестве части данных от радио-I/F 210; и цифро-аналоговый преобразователь (ЦАП) 247, который действует, чтобы преобразовывать выходной сигнал базовой полосы из FPGA 245 в аналоговый сигнал и выдавать аналоговый сигнал на аналоговый блок 250.
Более конкретно, блок 240 цифровой обработки конфигурирован для формирования данных, которые являются источником сигнала, который будет передаваться как сигнал определения местоположения от передатчика 200-1 внутренней установки. Далее, блок 240 цифровой обработки конфигурирован для отсылки сформированных данных в блок 250 аналоговой обработки в форме битового потока.
Хотя не ограничено конкретно следующим, например, после приложения мощности питания к FPGA 245, программа встроенного программного обеспечения, сохраненная в EEPROM 244, загружается на FPGA 245. Информация (данные битового потока) встроенного программного обеспечения загружается в память конфигурации, образованную посредством SRAM (статическая память произвольного доступа) 246 в пределах FPGA 245. Отдельные битовые данные загруженного битового потока служат источником информации для схемы, которая будет реализована на FPGA 245, обеспечивая возможность настройки ресурса, обеспеченного в FPGA 245, таким образом, чтобы реализовать схему, специфическую для встроенного программного обеспечения. Как указано выше, FPGA 245 имеет внешние данные конфигурации, не полагаясь на аппаратные средства, так что могут достигаться высокая разносторонность и гибкость.
Далее, процессор 241 действует, согласно внешней команде, принятой от радио-I/F 210 и основанной на данных, сохраненных в EEPROM 243, чтобы сохранить следующие данные в SRAM 246 (регистре) FPGA 245, в качестве параметра установки для передатчика 200-1 внутренней установки.
1) Код расширения (PRN код)
2) ID передатчика
3) Данные идентификации местоположения
4) Данные широковещательного уведомления
(Каждые из данных 3 и 4 сформированы в формате, совместимом с навигационным сообщением от спутника, в смысле аппаратных средств приемника, как описано ниже.)
Данные идентификации местоположения и данные широковещательного уведомления будут описаны ниже.
5) Параметр выбора цифрового фильтра
FPGA 245 действует на основе PRN кода, сохраненного в EEPROM 243, чтобы подвергнуть сигнал, формат которого описан ниже, обработке расширения спектра. Само значение PRN кода может быть сохранено и может считываться из EEPROM 243, или PRN код может генерироваться в реальном времени генератором PRN, содержащим регистр.
Программа для работы процессора 241 также предварительно сохранена в EEPROM 243. После активации передатчика 200-1 внутренней установки, эта программа считывается из EEPROM 243 и переносится в RAM 242.
Запоминающее устройство для хранения программы или данных не ограничено EEPROM 243 или EEPROM 244. Запоминающее устройство данных может быть таким, которое способно, по меньшей мере, хранить данные энергонезависимым способом. Далее, в случаях, где данные введены извне, как описано ниже, запоминающее устройство может быть таким, которое позволяет осуществлять запись данных в него. Структура данных для данных, которые должны сохраняться в EEPROM 243, описана ниже.
Блок аналоговой обработки
Блок 250 аналоговой обработки конфигурирован, чтобы модулировать несущую 1.57542 ГГц, используя данные битового потока из блока 240 цифровой обработки, формировать сигнал передатчика и посылать сигнал передатчика в антенну. Этот сигнал излучается антенной.
Более конкретно, сигнал с выхода ЦАП 247 блока 240 цифровой обработки преобразуется с повышением частоты повышающим преобразователем 252. Затем, после того, как только часть преобразованного с повышением частоты сигнала в данном диапазоне частот усилена посредством полосового фильтра (BPF) 253 и усилителя 254, усиленный сигнал вновь преобразуется с повышением частоты повышающим преобразователем 255. Затем, после того, как часть преобразованного с повышением частоты сигнала в данном диапазоне частот извлечена фильтром SAW (поверхностная акустическая волна), извлеченный сигнал преобразуется в сигнал, имеющий предопределенную интенсивность, переменным аттенюатором 257 и RF переключателем 258, и полученный сигнал передается антенной.
Тактовый сигнал для использования в повышающем преобразователе 252 и повышающем преобразователе 255 генерируется умножением тактового сигнала, предоставляемого от блока 230 I/O опорного тактового сигнала на FPGA 245, посредством умножителя 251.
Настройка соответствующих уровней переменного аттенюатора 257 и RF переключателя 258 управляется управляющим сигналом от процессора 241 через FPGA 245. RF переключатель 258 действует, чтобы эффективно изменять интенсивность сигнала посредством так называемой импульсной модуляции (PM).
Вышеописанным способом сигнал, имеющий структуру, совместимую с сигналом определения местоположения от спутника, излучается от передатчика 200-1 внутренней установки. В этом случае, содержимое сигнала не точно идентично тому, которое включено в сигнал определения местоположения, излучаемый от спутника. Один пример структуры сигнала, который должен излучаться передатчиком 200-1 внутренней установки, будет описан ниже (Фиг.5).
В приведенном выше описании FPGA 245 используется в качестве блока обработки для осуществления обработки цифрового сигнала в блоке 240 цифровой обработки. Альтернативно, любой другой подходящий тип блока обработки может использоваться, если он способен изменять функцию радио-(беспроводного) блока посредством программного обеспечения.
На Фиг.2 тактовый сигнал (Clk) подается на блок 250 аналоговой обработки через блок 240 цифровой обработки. Альтернативно, тактовый сигнал может непосредственно подаваться от блока 230 I/O опорного тактового сигнала в блок 250 аналоговой обработки.
В первом варианте осуществления блок 240 цифровой обработки и блок 250 аналоговой обработки показаны отдельно, для простоты иллюстрации. Однако, в физическом аспекте, они могут быть смешанным образом смонтированы на одной микросхеме.
Блок I/O опорного тактового сигнала
Блок 230 I/O опорного тактового сигнала конфигурирован для подачи тактового сигнала для управления работой блока 240 цифровой обработки или тактового сигнала для генерации несущей, на блок 240 цифровой обработки.
В "режиме внешней синхронизации" возбудитель 234 блока 230 I/O опорного тактового сигнала действует, чтобы подавать тактовый сигнал в блок 240 цифровой обработки и другие блоки, основываясь на сигнале синхронизации, выданном от внешнего тактового генератора на порт 220 канала внешней синхронизации.
Далее, в "режиме внешнего тактового сигнала", мультиплексор 232 блока 230 I/O опорного тактового сигнала действует, чтобы выбрать внешний тактовый сигнал, выданный на порт 221 внешнего тактового сигнала, таким образом, что тактовый сигнал выводится из PLL (контур фазовой автоподстройки частоты) схемы 233 и подается на блок 240 цифровой обработки и другие блоки в синхронизации с внешним тактовым сигналом.
В "режиме внутреннего тактового сигнала" мультиплексор 232 блока 230 I/O опорного тактового сигнала действует, чтобы выбрать внутренний тактовый сигнал, сгенерированный внутренним генератором 231 тактового сигнала, таким образом, что тактовый сигнал выводится из PLL схемы 233 и подается на блок 240 цифровой обработки и другие блоки в синхронизации с внутренним тактовым сигналом.
Внутреннее состояние (например, сигнал "PLL управления") передатчика внутренней установки может контролироваться из радио-I/F 210 на основе сигнала с выхода процессора 241. Цифровой интерфейс 260 ввода/вывода может быть конфигурирован, чтобы принимать ввод кодовой комбинации псевдошумового кода для модуляции расширения сигнала, излучаемого передатчиком 200-1 внутренней установки, или радио-I/F 210 может быть конфигурирован, чтобы принимать ввод дополнительных данных, которые должны передаваться от передатчика 200-1 внутренней установки. Например, дополнительные данные могут включать в себя текстовые данные (данные местоположения), указывающие на местоположение передатчика 200-1 внутренней установки. В случаях, когда передатчик 200-1 внутренней установки установлен в коммерческой зоне, например, в универмаге, рекламные данные, информация трафика, информация о погоде и/или информация о бедствиях могут быть введены в передатчик 200-1 внутренней установки в качестве дополнительных данных.
Когда комбинация псевдошумового кода (PRN код) вводится в передатчик 200-1 внутренней установки, она записывается в предопределенной области в EEPROM 243. В соответствии с потребностью, PRN-ID и имя передатчика могут дополнительно записываться в EEPROM 243, и затем записанные PRN-ID и имя передатчика могут включаться в сигнал определения местоположения. Дополнительные данные также записываются в область, зарезервированную в EEPROM 243 в зависимости от типа данных.
Структура данных для данных, сохраняемых в EEPROM 243
Со ссылкой на Фиг.3 ниже описана структура данных для данных, сохраняемых в EEPROM 243.
На Фиг.3 представлена диаграмма, концептуально показывающая один режим хранения данных в EEPROM 243, предусмотренной в передатчике 200-1 внутренней установки. EEPROM 243 содержит множество областей 300 - 350 для хранения данных.
В области 300 ID передатчика сохранен в виде числа для идентификации передатчика. Например, ID передатчика может быть числовым символом и/или буквенным символом, или их комбинацией, которая записывается в памяти энергонезависимым способом во время изготовления передатчика.
PRN-ID псевдошумового кода, назначенного передатчику, сохранен в области 310. Имя передатчика сохранено в области 320 в форме текстовых данных.
Псевдошумовая кодовая комбинация, назначенная передатчику, сохранена в области 330. Эта псевдошумовая кодовая комбинация является одной, выбранной из конечного множества кодовых комбинаций, которые предварительно назначены системе обеспечения информации о местоположении согласно первому варианту осуществления, из большого количества кодовых комбинаций, принадлежащих той же самой категории, что и псевдошумовые кодовые комбинации для спутников. Таким образом, псевдошумовая кодовая комбинация, назначенная передатчику, отличается от назначенной каждому из спутников.
Число псевдошумовых кодовых комбинаций, назначаемых системе обеспечения информации о местоположении, является конечным, тогда как число передатчиков внутренней установки изменяется в зависимости от размера места установки для каждого из передатчиков внутренней установки или структуры места установки (число этажей здания и т.д.), так что число передатчиков внутренней установки, вероятно, будет больше, чем число кодовых комбинаций. Таким образом, возможно, что множество передатчиков внутренней установки имеют ту же самую псевдошумовую кодовую комбинацию. В этом случае, местоположение установки каждого из передатчиков внутренней установки, имеющих ту же самую кодовую комбинацию, может быть установлено с учетом вывода сигнала. Это позволяет предотвратить ситуацию, когда множество сигналов определения местоположения, использующих ту же самую псевдошумовую кодовую комбинацию, будут приниматься тем же самым одним из устройств обеспечения информации о местоположении, при той же самой временной характеристике.
Данные местоположения для идентификации местоположения установки передатчика 200-1 внутренней установки хранятся в области 340. Например, данные местоположения выражены как комбинация долготы, широты и высоты. В дополнение или вместо данных местоположения, в области 340 могут быть сохранены почтовый адрес/имя здания. В настоящем изобретении данные, обеспечивающие возможность идентификации местоположения установки передатчика 200-1 внутренней установки только как такового, например, "комбинация широты, долготы и высоты", "комбинация широты, долготы и номера этажа здания", "комбинация широты, долготы, номера этажа здания и высоты", "почтовый адрес/имя здания" "комбинация широты, долготы и высоты и почтового адреса/имени здания", будут обобщенно упоминаться как "данные идентификации местоположения". Кроме того, данные, указывающие информацию иную, чем данные идентификации местоположения, такие как вышеупомянутые «информация рекламы», «информация трафика», «информация о погоде» и/или «информация о бедствиях», которые должны широковещательно передаваться передатчиком внутренней установки, будут упоминаться как «данные широковещательного оповещения».
Данные идентификации местоположения сохранены в области 340, а данные широковещательного оповещения сохранены в области 350.
Каждое из PRN-ID, имени передатчика устройства связи, псевдошумовой кодовой комбинации, данных идентификации местоположения и данных широковещательного оповещения может заменяться на другие данные, вводимые через радиоинтерфейс (I/F), как упомянуто выше. В частности, данные широковещательного оповещения заменяются или обновляются по мере необходимости. Например, в случаях, когда передатчик 200-1 внутренней установки установлен в универмаге, данные рекламы могут предоставляться на передатчик 200-1 внутренней установки администратором операций в качестве коммерческой операции универмага.
Структура данных сигнала, передаваемого от передатчика 200-1 внутренней установки
Сначала будет описана структура данных сигнала, совместимого с сигналом определения местоположения, излучаемого со спутника вместе с навигационным сообщением, наложенным на него, например C/A кодом L1 полосы.
LIC/A совместимый сигнал
Со ссылкой на Фиг.4 будет описан сигнал позиционирования (определения местоположения), передаваемый от передатчика спутника.
На Фиг.4 представлена диаграмма, показывающая структуру сигнала 500 C/A кода L1 полосы, который будет излучаться от передатчика, установленного на GPS спутнике. Сигнал 500 состоит из пяти подкадров, каждый из которых состоит из 300 битов, то есть, подкадров 510-550. Подкадры 510-550 повторно передаются передатчиком. В этом примере каждый из подкадров 510-550 состоит из 300 битов и передается со скоростью 50 б/с (бит в секунду). Таким образом, каждый из подкадров передается за 6 секунд. Содержимое каждого из 4-го и 5-го подкадров 540, 550 последовательно заменяется другим содержимым и возвращается к начальному содержимому в 25-ом цикле. Каждое заменяемое содержимое называется «страницей», и каждый их 4-го и 5-го подкадров состоит из 25 страниц.
1-ый подкадр 510 содержит 30-битовую транспортную служебную нагрузку 511, 30-битовую информацию 512 времени часов и 240-битовые данные 513 сообщения. Более конкретно, информация 512 времени часов содержит информацию времени часов, полученную, когда генерируется 1-ый подкадр 510, и ID подкадра. ID подкадра - это идентификационный номер для того, чтобы отличить 1-ый подкадр от остальных подкадров. Данные 513 сообщения включают в себя недельное число GPS, информацию часов, информацию степени исправности для GPS спутника, информацию о точности орбиты для GPS спутника.
2-ой подкадр 520 содержит 30-битовую транспортную служебную нагрузку 521, 30-битовую информацию 522 времени часов и 240-битовые данные 523 сообщения. Информация 522 времени часов имеет ту же самую структуру, что и информация 512 времени часов в 1-ом подкадре 510. Данные 523 сообщения включают эфемериду. Эфемерида (эфемерида широковещательной передачи) означает орбитальную информацию о спутнике, излучающем сигнал позиционирования. Эфемерида является высокоточной информацией, которая последовательно обновляется административным бюро, управляющим навигацией спутника.
3-ий подкадр 530 имеет ту же самую структуру, что и у 2-го подкадра 520. Более конкретно, 3-ий подкадр 530 содержит 30-битовую транспортную служебную нагрузку 531, 30-битовую информацию 532 времени часов и 240-битовые данные 533 сообщения. Информация 532 времени часов имеет ту же самую структуру, что и информация 512 времени часов в 1-ом подкадре 510. Данные 533 сообщения включают эфемериду.
4-ый подкадр 540 содержит 30-битовую транспортную служебную нагрузку 541, 30-битовую информацию 542 времени часов и 240-битовые данные 543 сообщения. В отличие от вышеупомянутых данных 513, 523, 533, сообщения, данные 543 сообщения включают информацию альманаха, сводку информации о степени исправности спутника, информацию об ионосферной задержке и параметр UTC (Универсальное синхронизированное время).
5-ый подкадр 550 содержит 30-битовую транспортную служебную нагрузку 551, 30-битовую информацию 552 времени часов и 240-битовые данные 553 сообщения. Данные 553 сообщения включают информацию альманаха и сводку информации о степени исправности спутника. Каждые из данных 543, 553 сообщений состоят из 25 страниц, причем вышеупомянутые различные типы информации определены в каждой странице. Информация альманаха указывает на соответствующие грубые орбиты GPS спутника и всех остальных GPS спутников. После того, как передача подкадров 510-550 повторена 25 раз, данные сообщения возвращаются к 1-ой странице, и будет передаваться та же самая информация.
Подкадры 510-550 передаются от каждого из передатчиков 120, 121, 122. Когда подкадры 510-550 принимаются устройством 100 обеспечения информации о местоположении, местоположение устройства 100 обеспечения информации о местоположении вычисляется на основе информации обслуживания/управления, включенной в каждую из транспортных служебных нагрузок 511-551, информации 512-552 времени часов и данных 513-553 сообщения.
В вышеупомянутом примере каждый из подкадров 510-550 состоит из 10 слов. Каждое из слов состоит из 30 битов. Каждое из слов содержит требуемые данные и бит четности для обнаружения ошибок, причем первое из слов в каждом из подкадров включает в себя преамбулу. Информация синхронизации и телеметрическая информация включены в два из слов в начале подкадра. HOW (слово передачи обслуживания) и z-отсчет включены в эту информацию. Z-отсчет - это данные, эквивалентные коду времени часов (час, минута, секунда), и HOW - это данные для перехода к P коду.
Структура IMES сигнала
Сигнал, который должен передаваться от передатчика 200-1 внутренней установки (IMES сигнал), будет описан ниже.
Система обеспечения информации о местоположении согласно настоящему изобретению предназначена, чтобы устанавливать передатчик внутренней установки в местоположении, таком как внутренняя область, куда трудно проникнуть сигналу определения местоположения от GPS или QZSS спутника, так что пользователь получает возможность непрерывно получать информацию о местоположении во внутренней и внешней областях, используя тот же самый принимающий терминал, что и таковой для GPS или QZSS.
Система может реализовать определение местоположения во внутренней и внешней областях, изменяя только программное обеспечение, при перестройке микросхемы приемника GPS (входного каскада, принимающего сигнал местоположения), который был уже установлен в существующем мобильном телефоне, без модификации.
Навигационное сообщение, наложенное на GPS сигнал определения местоположения, периодически передается при очень низкой скорости передачи 50 битов в секунду, и в следующем фиксированном формате: 300 битов/подкадр и 5 подкадров×25 страниц, как упомянуто выше.
Хотя стандартизация в аппаратных средствах приемника, для облегчения стандартизацию между IMES сигналом и GPS сигналом, имеет вышеупомянутое преимущество, имеется проблема, состоящая в том, что требуется слишком много времени, чтобы пользователь получил информацию о местоположении после считывания сообщения, если фиксированный формат GPS сигнала используется без модификации. Кроме того, если используется сигнал, совместимый с сигналом местоположения с фиксированным форматом от спутника, то передаваемый объем сообщения будет ограничен. Таким образом, в случаях, где эта система используется в качестве носителя рекламной информации, будут введены ограничения на количество информации.
Далее, в отличие от спутника GPS, передатчик 200-1 внутренней установки в настоящем изобретении предназначен для передачи информации о местоположении передатчика внутренней установки непосредственно к пользователю, так что он будет периодически передавать ту же самую битовую последовательность, как описано ниже. В этом случае, если просто использовать метод синхронизации кадров, использующий преамбулу и бит четности, и битовая последовательность, имеющая те самые позиционные соотношения между преамбулой и битом четности при этом появляется в некорректном положении в кадре, вероятно, что возникает ошибка в синхронизации кадров, и корректная информация о местоположении не демодулируется в пользовательском терминале.
Оповещение об информации о местоположении во время экстренной передачи сообщений должно иметь высокую степень точности. В системе CDMA (множественный доступ с кодовым разделением) система, при условии, что достаточное отношение сигнал-шум не получается для полезного сигнала, то есть, из-за так называемой "проблемы ближней-дальней зоны", захват/отслеживание сигнала, вероятно, будет выполняться с использованием ошибочного PRN кода. Более определенно, в то время как сигнал (IMES сигнал) от передатчика внутренней установки и сигнал определения местоположения от спутника отличаются друг от друга на основе их PRN кодов, существует вероятность того, что спутниковый сигнал определения местоположения будет ошибочно захвачен на основе PRN кода для IMES сигнала, или сигнал от передатчика внутренней установки будет ошибочно захвачен на основе PRN кода для спутникового сигнала. В этом случае необходимо быстро обнаружить ошибочный захват и выполнить повторный захват на основе правильного PRN кода. Ввиду этой обработки, вероятно, значительно увеличится время, требуемое для получения информации о местоположении.
В настоящем изобретении, в целях достижения сокращения времени получения сообщения, обеспечения гибкости в зависимости от намеченного пользователем использования и обеспечения высокой надежности, требуемой для оповещения информации о местоположении во время экстренной передачи сообщений, при поддержании стандартизации между IMES сигналом и GPS сигналом в максимальной степени, следующая структура сигнала используется для IMES сигнала.
i) Стандартизация с сигналом определения местоположения от спутника определения местоположения (например, GPS C/A сигнал)
Ввиду стандартизации в аппаратных средствах приемника и программного обеспечения для обработки сигнала, желательно стандартизировать спецификации сигнала и спецификации сообщения. Высокочастотная характеристика (RF характеристика) IMES сигнала и последовательность PRN кода для IMES сигнала стандартизированы с таковыми для сигнала определения местоположения от спутника определения местоположения (например, GPS C/A сигнала). Что касается структуры сообщения, одно слово состоит из 30 битов, и 8-битовая преамбула и 6-битовая четность для обнаружения ошибки в коде обеспечены в головной части кадра и в концевой части каждого слова, соответственно. Что касается алгоритма вычисления кода четности, то используется тот же самый алгоритм, что и используемый для GPS C/A сигнала.
Таким образом, более широко, термин "слово" означает блок данных передачи, подвергаемый обнаружению ошибки. Термин "кадр" означает блок данных передачи, который включает в себя сигнал преамбулы для синхронизации в его начале. Кадр составлен из множества слов, например, 10 слов. "Обнаружение ошибки", которое должно выполняться пословно, может быть "обнаружением и исправлением ошибки" или может быть "исправлением ошибки".
ii) Сокращение TTRM (время, чтобы прочитать сообщение)
Фиксированный формат навигационного сообщения сигнала определения местоположения от спутника определения местоположения (например, GPS C/A сигнал) изменен, чтобы получить формат с переменной длиной кадра и более коротким сообщением, который будет использоваться.
iii) Разносторонность/гибкость в зависимости от намеченного использования
Фиксированный формат навигационного сообщения сигнала определения местоположения от спутника определения местоположения (например, GPS C/A сигнала) изменен таким образом, что первое слово в кадре имеет ИД типа сообщения с заданной длиной в битах, например, длиной в 3 бита, чтобы позволить персоналу, выполняющему установку передатчика, установить содержание и порядок/частоту передачи сообщения, которое должно передаваться, в зависимости от намеченного использования/цели. В последующих спецификациях сообщения, которые будут описаны для иллюстрации, среди множества ИД типа сообщения, устанавливаемых посредством 3 битов, определены четыре ИД, а остальные ИД зарезервированы для нового использования в будущем.
iv) Обеспечение высокой надежности внутренней информации о местоположении (предотвращение ошибочной синхронизации)
Битовый счетчик, имеющий заданную длину в битах, например, 3-битовую длину, обеспечен в каждом слове, и значение счета получает приращение каждый раз, когда передается каждое слово. Когда значение отсчета достигнет 111, операция отсчета будет перезапущена с 000. Операция отсчета позволяет устранить ситуацию, где данное соотношение между преамбулой и четностью в конце слова становится условно удовлетворенным в положении ином, чем надлежащее положение, и будет неоднократно появляться, и достоверно обнаруживать головную часть кадра, чтобы установить синхронизацию кадра так, чтобы препятствовать выводу ошибочной информации о местоположении.
v) Обеспечение высокой надежности внутренней информации о местоположении (предотвращение ошибочного захвата)
В модернизированном GPS сигнале (L2C сигнал и последующие сигналы) сообщение передается вместе с PRN-ID, включенным в него, так что приемник может немедленно распознать ошибочный захват, основываясь на том факте, что захваченный PRN код не идентичен PRN-ID в сообщении. Однако PRN-ID не включен в C/A сигнал. Поэтому в настоящем изобретении, чтобы быстро распознать ошибочный захват, преамбула сообщения для передатчика внутренней установки установлена на значение (битовую комбинацию), отличающуюся от значения из преамбулы QZSS или GPS сигнала.
Сигнальные спецификации для IMES сигнала
Структура сигнала, который должен передаваться от передатчика 200-1 внутренней установки (IMES сигнала), будет более конкретно описана ниже.
IMES сигнал имеет RF характеристику, соответствующую такой характеристике спутникового сигнала определения местоположения (например, C/A код L1-полосы для GPS или QZSS). В то время как IMES сигнал является тем же самым, что и спутниковый сигнал определения местоположения, в том, что структура навигационного сообщения имеет 30-битовое слово в качестве базового блока, он имеет разграниченную структуру короткого кадра, чтобы обеспечить более короткое TTRM.
Ввиду RF характеристики и характеристики сообщения, сигнальные спецификации будут описаны ниже.
(1) RF характеристика
(1-1) Структура сигнала
Например, номинальная центральная частота составляет 1575.42 МГц, и частота PRN-расширения составляет 1.023 МГц. Например, схема модуляции PRN-расширения представляет собой BPSK (двоичная фазовая манипуляция) модуляцию.
(1-2) Число каналов и PRN код
IMES сигнал имеет единственную несущую и является той же самой кодовой последовательностью, что и для PRN кода спутникового сигнала определения местоположения (например, C/A сигнала).
(1-3) Навигационное сообщение
Навигационное сообщение IMES сигнала имеет ту же самую структуру слова, битовую скорость и схему модуляции, как у навигационного сообщения спутникового сигнала определения местоположения (например, C/A сигнала).
(2) Характеристика сообщения
(2-1) Структура слова
Одно слово имеет ту же самую длину слова, как у спутникового сигнала определения местоположения, например, 30 битов. Например, в случаях, где одно слово состоит из 30 битов, одно слово включает 21-битовые данные, 3-битовый счетчик слова и 6-битовую четность.
(2-2) Счетчик слова
Каждое слово имеет счетчик слова. FPGA 245 передатчика 200-1 внутренней установки действует так, чтобы каждый раз, когда передается каждое слово, значение счетчика слова получало приращение на заданное значение, например, на единицу.
Счетчик слова способствует идентификации слова и разделителей кадров. Чтобы способствовать идентификации разделителей, 3-битовый счетчик слова конфигурирован таким образом, что он не принимает то же самое значение, что и значение 3 битов более высокого порядка преамбулы, то есть, пропускает значение.
(2-3) Код четности
Код обнаружения ошибки (например, код четности), имеющий заданную длину в битах, например, 6-битовую длину, предусмотрен в концевой части 30-битового слова. Код обнаружения ошибок является тем же самым кодом, что и код спутникового сигнала определения местоположения, например, (32, 26) расширенный код Хэмминга. Код четности способствует идентификации разделителя слов.
(2-4) Алгоритм четности и алгоритм проверки четности
Используются те же самые алгоритм генерации кода обнаружения ошибки и алгоритм обнаружения ошибки, что и у спутникового сигнала определения местоположения.
(2-5) Структура кадра
На Фиг.5 представлена диаграмма, показывающая структуру кадра IMES сигнала.
Один кадр состоит из целочисленного умножения слова и имеет следующий формат. Кадр, имеющий проиллюстрированную структуру, передается последовательно и периодически.
В 1-ом слове имеется преамбула, имеющая заданную длину в битах, например, 8-битовую длину, и за преамбулой следует идентификатор типа сообщения (MID), имеющий заданную длину в битах, например, 3-битовую длину. Кроме 3-битового счетчика слова в каждом слове и 6-битовой четности в каждом слове, все остальные биты являются битами данных.
Фиг.5 иллюстрирует случай, когда один кадр состоит из одного слова, другой случай, когда один кадр состоит из двух слов, и еще один случай, когда один кадр состоит из трех слов.
Хотя IMES сигнал, который должен передаваться от каждого из передатчиков 200-1 - 200-6 внутренней установки, стандартизирован со спутниковым сигналом определения местоположения с точки зрения структуры слова, он отличается от спутникового сигнала определения местоположения с точки зрения числа слов, составляющих один кадр. Более конкретно, один кадр IMES сигнала состоит из множества слов, причем число слов меньше, чем число слов, включенных в один кадр спутникового сигнала определения местоположения.
(2-6) Преамбула
8-битовая преамбула, обеспеченная на переднем конце 1-го слова в каждом кадре, имеет заданную битовую комбинацию.
Эта преамбула способствует идентификации разделителя кадров. В отличие от битовой комбинации преамбулы спутникового сигнала определения местоположения, битовая комбинация преамбулы IMES сигнала конфигурирована, чтобы позволить IMES сигналу отличаться от спутникового сигнала определения местоположения GPS или QZSS.
(2-7) ID типа сообщения (MID)
3-битовый ID типа сообщения (MID), обеспеченный после преамбулы 1-го слова в каждом кадре, указывает длину кадра и содержимое кадра, включая 1-ое слово.
Фиг.6 показывает сравнение между значением MID и длиной/содержимым кадра. Содержание Фиг.6 будет более конкретно описано ниже.
(2-7-1) Содержание сообщения
(2-7-1-1) ID типа сообщения "000": информация о местоположении 1
Когда ID типа сообщения равен "000", длина кадра равна 3 словам, и содержимым кадра является информация о местоположении.
На Фиг.7 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "000".
На Фиг.8 представлена таблица, показывающая соответствующие примеры содержимого данных в кадре, соответствующие значения битовой длины и LSB (младший бит), и диапазон, который должен быть выражен. Со ссылкой на Фиг.7 и 8, это содержимое описано ниже.
i) Номер этажа
С 12-го по 18-ый биты 1-го слова представляют номер этажа здания, где установлен передатчик внутренней установки, и единицей этого является "n-ый".
Это значение имеет битовую длину 7 битов и никакого кода. LSB указывает на 1-ый этаж. Установлен сдвиг -26-ой этаж, и выражен диапазон от -26-го этажа до +100-го этажа.
ii) Широта
С 1-го по 21-ый биты 2-го слова упорядочены на стороне MSB (старшего бита). Всего 22 бита, полученные добавлением 19-го бита 1-го слова к 21 биту, представляют широту передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 180/1022 [градусов] до 0,000043 [градусов], что представляет от -90 градусов до +90 градусов. Это эквивалентно приблизительно 4,8 м в направлении «север-юг».
iii) Долгота
С 1-го по 21-ый биты 3-го слова упорядочены на стороне MSB. Всего 23 бита, полученные добавлением 20-го и 21-го битов 1-го слова к 21 биту, представляют долготу передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 360/1023 [градусов] до 0,000043 [градусов], что представляет от -180 градусов до +180 градусов. Это эквивалентно приблизительно 4,8 м. в направлении «восток - запад» по экватору.
(2-7-1-2) ID типа сообщения "001": информация о местоположении 2
Когда ID типа сообщения равен "001", длина кадра равна 4 словам, и содержимым кадра является информация о местоположении.
На Фиг.9 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "001".
На Фиг.10 представлена таблица, показывающая соответствующие примеры содержимого данных в кадрах, соответствующие значения битовой длины и LSB, и диапазона, который будет выражен. Со ссылкой на Фиг.9 и 10, это содержимое будет описано ниже.
i) Номер этажа
С 12-го по 20-ый биты 1-го слова представляют номер этажа здания, где установлен передатчик внутренней установки, и его единицей является "n-ый".
Это значение имеет битовую длину 9 битов и никакого кода. LSB указывает на 1-ый этаж. Установлен сдвиг -26-ой этаж, и выражен диапазон от -26-го этажа до +100-го этажа.
ii) Широта
С 1-го по 21-ый биты 2-го слова упорядочены на стороне MSB (старшего бита). Всего 23 бита, полученные добавлением 17-го и 18-го битов 4-го слова к 21 биту, представляют широту передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 180/1023 [градусов] до 0,000021 [градусов], что представляет от -90 градусов до +90 градусов. Это эквивалентно приблизительно 2,4 м в направлении «север-юг».
iii) Долгота
С 1-го по 21-ый биты 3-го слова упорядочены на стороне MSB. Всего 24 бита, полученные добавлением с 19-го по 21-ый битов 4-го слова к 21 биту, представляют долготу передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 360/1024 [градусов] до 0,000021 [градусов], что представляет от -180 градусов до +180 градусов. Это эквивалентно приблизительно 2,4 м в направлении «восток - запад» по экватору.
iv) Высота
С 1-го по 12-ый биты 4-го слова представляют высоту передатчика внутренней установки, и ее единицей является "м (метр)".
Это значение не имеет никакого кода. LSB указывает на 1 м. Установлено смещение -95 м, и выражен диапазон от -95 м до +4000 м.
(2-7-1-3) ID типа сообщения "011": Короткий ID
Когда ID типа сообщения равен "011", длина кадра равна 1 слову, и содержимым кадра является короткий ID(IDS).
На Фиг.11 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "011".
В кадре, соответствующем короткому ID, передается 10-битовое сообщение короткого ID.
В отличие от ID типа сообщения, равного "000" (тип 0), и ID типа сообщения, равного "001" (тип 1), информация о местоположении не может быть непосредственно получена из содержимого сообщения короткого ID. Поставщик услуг может уникально определить ID сообщения короткого ID для развития гибкой услуги информации о местоположении в области, более узкой, чем для типов 0 и 1.
Сообщение короткого ID используется для ассоциирования с относящейся к местоположению информацией, которая будет обеспечиваться, в локальном сервере 204, управляемом поставщиком услуг в объектах коммерческого предприятия, таких как универмаг, станционный пассаж или подземный торговый центр, и используется в качестве руководства маршрута или ключа информационной доставки в локальном сервере.
(2-7-1-4) ID типа сообщения "100": Средний ID
Когда ID типа сообщения равен "100", длина кадра равна 2 словам, и содержимым кадра является средний ID(IDM).
На Фиг.12 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "100".
В кадре, соответствующем среднему ID, передается 10-битовое сообщение среднего ID и 21-битовое сообщение среднего ID.
Сообщение среднего ID назначается объектам коммерческого предприятия, таким как универмаг, станционный пассаж или подземный торговый центр, и используется, чтобы получить доступ к локальному серверу, которым управляет поставщик услуг в объектах коммерческого предприятия.
Более конкретно, например, сервер, соответствующий серверу доменного имени в Интернете, распоряжается средним ID и URL (универсальный идентификатор ресурса) локального сервера, как базой данных, причем пользователь может получить доступ к локальному серверу, используя средний ID.
Таким образом, устройство 100-5 обеспечения информации о местоположении (например, мобильный телефон) действует, в ответ на прием сообщения короткого ID и сообщения среднего ID, чтобы послать запрос об относящейся к местоположению информации, соответствующей сообщениям, в локальный сервер 204 через базовую станцию 202 и сеть, чтобы получить относящуюся к местоположению информацию.
Как используется здесь, термин "относящаяся к местоположению информация" может быть, по меньшей мере, одной из упомянутой информации, идентифицирующей местоположение передатчика внутренней установки (например, номер этажа, широта, долгота и/или высота), "рекламной информации", "информации трафика", "информации о погоде" и "информации о бедствиях".
Конфигурация устройства 100 обеспечения информации о местоположении (приемник)
Со ссылкой на Фиг.13 ниже описано устройство 100 обеспечения информации о местоположении. На Фиг.13 показана блок-схема конфигурации аппаратных средств устройства 100 обеспечения информации о местоположении.
Устройство 100 обеспечения информации о местоположении содержит антенну 402; RF (РЧ) входную схему 404, электрически соединенную с антенной 402; понижающий преобразователь 406, электрически соединенный с РЧ входной схемой 404; аналого-цифровой преобразователь (АЦП) 408, электрически соединенный с понижающим преобразователем 406; процессор 410 базовой полосы, электрически соединенный с АЦП 408; память 420, электрически соединенную с процессором 410 базовой полосы; навигационный процессор 430, электрически соединенный с процессором 410 базовой полосы; и дисплейный блок 440, электрически соединенный с навигационным процессором 430.
Память 420 содержит множество областей, хранящих множество псевдошумовых кодовых комбинаций как данные для идентификации каждого источника излучения сигналов позиционирования (определения местоположения). Например, в случаях, где 48 типов кодовых комбинаций используются в системе, память 420 может включать сорок восемь областей от 421-1 до 421-48. В другой ситуации, если число типов кодовых комбинаций дополнительно увеличивается, большее число областей будет обеспечиваться в памяти 420. Наоборот, число типов кодовых комбинаций может быть установлено на значение меньшее, чем число областей, которые обеспечены в памяти 420, в зависимости от конкретного случая.
Например, в случаях, где 48 типов кодовых комбинаций используются в спутниковой системе определения местоположения, использующей 24 спутника, данные идентификации в числе 24 (PRN коды) для идентификации соответствующих спутников и 12 дополнительных данных, сохранены в области от 421-1 до 421-36. В этом случае, например, псевдошумовая кодовая комбинация для первого из спутников может быть сохранена в области 421-1. Кодовая комбинация может считываться из области 421-1 и подвергаться обработке взаимной корреляции по отношению к принятому сигналу, чтобы выполнить отслеживание сигнала и декодирование навигационного сообщения, включенного в принятый сигнал. Память 420 также хранит структуру преамбулы сигнала определения местоположения от каждого из спутников и структуру преамбулы IMES сигнала от каждого из передатчиков 200 внутренней установки. Хотя метод считывания предварительно сохраненных кодовых комбинаций показан в качестве примера, также может использоваться метод генерации кодовых комбинаций с использованием генератора кодовых комбинаций. Например, генератор кодовой комбинации может быть реализован путем комбинирования двух сдвиговых регистров с обратными связями. Конфигурация и работа генератора кодовых комбинаций хорошо известны специалистам в данной области техники, поэтому их подробное описание опущено.
Тем же способом множество псевдошумовых кодовых комбинаций, назначенных передатчикам внутренней установки с 1-го по n-ый, способным излучать сигнал определения местоположения, сохранены в областях 421-37 - 421-48. Например, псевдошумовая кодовая комбинация, назначенная 1-му передатчику внутренней установки, может быть сохранена в области 421-37. В этом случае, в то время как внутренние передатчики, имеющие 12 типов кодовых комбинаций, могут использоваться в первом варианте осуществления, предпочтительно разместить передатчики внутренней установки таким образом, что два или более из передатчиков внутренней установки, использующих ту же самую кодовую комбинацию, не располагаются в пределах диапазона приема того же самого одного из устройств обеспечения информации о местоположении. Это позволяет установить 12 или более передатчиков внутренней установки, например, на том же самом этаже здания 130.
Процессор 410 базовой полосы содержит блок 412 коррелятора, приспособленный для приема сигнала с выхода АЦП 408, блок 414 управления для управления работой блока 412 коррелятора и блок 416 определения для определения источника излучения сигнала определения местоположения на основе данных с выхода блока 414 управления. Навигационный процессор 430 содержит блок 432 определения внешнего местоположения для определения внешнего местоположения устройства 100 обеспечения информации о местоположении на основе сигнала с выхода блока 416 определения и блок 434 определения внутреннего местоположения для получения информации, указывающей внутреннее местоположение устройства 100 обеспечения информации о местоположении, на основе данных с выхода блока 416 определения.
Антенна 402 может принимать соответствующие сигналы определения местоположения, излучаемые от GPS спутников 110, 111, 112, и сигнал определения местоположения, излучаемый от передатчика 200-1 внутренней установки. Далее, в случаях, где устройство 100 обеспечения информации о местоположении реализовано как мобильный телефон, антенна 402 также может передавать и принимать сигнал беспроводной связи или передачи данных, в дополнение к приему вышеупомянутых сигналов определения местоположения.
РЧ входная схема 404 действует, в ответ на прием сигнала, принимаемого антенной 402, чтобы выполнить обработку удаления шума или обработку фильтрации для вывода только сигнала, имеющего предопределенную ширину полосы. Сигнал с выхода РЧ входной схемы 404 вводится в понижающий преобразователь 406.
Понижающий преобразователь 406 действует, чтобы усиливать сигнал с выхода РЧ входной схемы 404 и выводить усиленный сигнал как сигнал промежуточной частоты (ПЧ). Сигнал промежуточной частоты вводится в АЦП 408. АЦП 408 действует, чтобы подвергнуть сигнал промежуточной частоты, введенный в него, обработке цифрового преобразования, чтобы преобразовать его в цифровые данные. Цифровые данные вводятся в процессор 410 базовой полосы.
В процессоре 410 базовой полосы, блок 412 коррелятора действует для выполнения обработки корреляции между принятым сигналом и кодовой комбинацией, считанной из памяти 420 блоком 414 управления. Например, блок 414 управления действует для обеспечения двух типов (или двух или более типов) кодовых комбинаций, отличающихся по фазе кода на 1 бит, и блок 412 коррелятора действует для выполнения обработки сопоставления кодовых комбинаций с цифровыми данными, посланными из АЦП 408. Далее, блок 412 коррелятора действует, основываясь на кодовых комбинациях, чтобы отслеживать сигнал определения местоположения, принимаемый устройством 100 обеспечения информации о местоположении, и идентифицировать одну из кодовых комбинаций, которая имеет битовую последовательность, идентичную последовательности сигнала определения местоположения. Таким способом идентифицируется псевдошумовая кодовая комбинация. Таким образом, устройство 100 обеспечения информации о местоположении может определить, от какого из спутников передан принятый сигнал определения местоположения, или передан ли принятый сигнал определения местоположения от передатчика внутренней установки. Затем устройство 100 обеспечения информации о местоположении действует на основе идентифицированной кодовой комбинации, чтобы демодулировать сигнал определения местоположения и декодировать сообщение, содержащееся в нем.
Более конкретно, блок 416 определения действует, чтобы выполнить вышеупомянутое определение и отослать данные, в зависимости от определения, к навигационному процессору 430. Блок 416 определения действует, чтобы определить, идентична ли преамбула, включенная в принятый сигнал определения местоположения, преамбуле, назначенной передатчику иному, чем передатчики, установленные на GPS спутниках.
Один пример, где 24 GPS спутника используются в системе определения местоположения, будет описан ниже. В этом случае, используются 36 типов псевдошумовых кодов, включая дополнительные коды. Далее, в случаях, когда PRN-ID включен в GPS сигнал определения местоположения, PRN-01-PRN-24 могут использоваться в качестве чисел для того, чтобы идентифицировать соответствующие GPS спутники (PRN-ID), и PRN-25-PRN-36 могут использоваться в качестве чисел для того, чтобы идентифицировать соответствующие дополнительные спутники. Дополнительный спутник означает спутник, который запущен в дополнение к первоначально запущенному спутнику. Дополнительный спутник запускается, чтобы подготовиться к возможному отказу GPS спутника или передатчика и других компонентов, установленных на GPS спутнике.
Далее, например, 12 типов псевдошумовых кодовых комбинаций назначены передатчикам (например, передатчикам 200-1,… внутренней установки) иным, чем передатчик, установленный на GPS спутниках, причем числа, отличающиеся от PRN-ID, назначенных спутникам, такие как PRN-37-PRN-48, назначаются соответствующим передатчикам. Другими словами, в этом примере, имеется 48 PRN-ID. Например, PRN-37-PRN-48 назначены передатчикам внутренней установки, принимая во внимание расположение передатчиков внутренней установки. Таким образом, если выход передатчика установлен на уровень, позволяющий избегать помех между сигналами, излучаемыми от передатчиков внутренней установки, тот же самый PRN-ID может использоваться в двух или более из передатчиков внутренней установки. На основе такого размещения передатчики могут использоваться в количестве большем, чем число PRN-ID, назначенных передатчикам для использования на земле. Далее, PRN-ID могут использоваться так, что они включаются в соответствующие сигналы от передатчиков внутренней установки, как числа для идентификации соответствующих передатчиков внутренней установки.
Блок 416 определения действует, в отношении псевдошумовых кодовых комбинаций, сохраненных в памяти 420, чтобы определять, идентична ли кодовая комбинация, полученная из принятого сигнала определения местоположения, кодовой комбинации, назначенной каждому из передатчиков внутренней установки. Если две кодовых комбинации идентичны друг другу, блок 416 определения определяет, что принятый сигнал определения местоположения передан от одного из передатчиков внутренней установки. В противном случае блок 416 определения определяет, что принятый сигнал определения местоположения передан от одного из GPS спутников. Тогда блок 416 определения действует, ссылаясь на кодовые комбинации, сохраненные в памяти 420, чтобы определить один из спутников, которому назначена полученная кодовая комбинация. Хотя пример, основанный на кодовых комбинациях, показан как методология для определения, определение может выполняться на основе сравнения других данных. Например, сравнение PRN-ID может использоваться для определения.
Если принятый сигнал идентифицирован как сигнал, передаваемый от одного из GPS спутников, блок 416 определения действует, чтобы отсылать данные, полученные из идентифицированного сигнала, к блоку 432 определения внешнего местоположения. Данные, полученные из идентифицированного сигнала, включают навигационное сообщение. В противном случае, если принятый сигнал идентифицирован как сигнал, переданный от одного из передатчиков внутренней установки, например, передатчика 200-1 внутренней установки, блок 416 определения действует, чтобы отослать данные, полученные из идентифицированного сигнала, к блоку 434 определения внутреннего местоположения. Эти данные являются значениями координат, предварительно установленными как данные для идентификации местоположения передатчика 200-1 внутренней установки. В определенной ситуации может использоваться идентификационный номер этого передатчика.
В навигационном процессоре 430, блок 432 определения внешнего местоположения действует, на основе данных, посланных из блока 416 определения, чтобы выполнять обработку для вычисления местоположения устройства 100 обеспечения информации о местоположении. Более конкретно, блок 432 определения внешнего местоположения действует, на основе данных, включенных в сигналы, излучаемые от трех или более (предпочтительно, четырех или более) GPS спутников, чтобы вычислить соответствующие времена распространения сигналов и на основе результата вычисления вычислить местоположение устройства 100 обеспечения информации о местоположении. Эта обработка выполняется с использованием обычной технологии спутникового определения местоположения. Эта обработка была бы легко понятна специалистам в данной области техники, поэтому ее описание будет опущено.
В навигационном процессоре 430 блок 434 определения внутреннего местоположения действует на основе данных, посланных из блока 416 определения, чтобы выполнить обработку для определения положения в случаях, когда устройство 100 обеспечения информации о местоположении расположено во внутренней области. Как описано ниже, передатчик 200-1 внутренней установки действует, чтобы излучать сигнал определения местоположения, включая данные для идентификации местоположения (данные идентификации местоположения). Таким образом, устройство 100 обеспечения информации о местоположении может принимать сигнал определения местоположения и извлекать данные, включенные в сигнал, чтобы идентифицировать местоположение устройства 100 обеспечения информации о местоположении на основе извлеченных данных. Блок 434 определения внутреннего местоположения выполняет эту обработку. Данные, вычисленные блоком 432 определения внешнего местоположения, или данные, считанные блоком 434 определения внутреннего местоположения, используются для отображения на дисплейном блоке 440. Более определенно, эти данные включаются в данные для отображения экранного изображения для генерации изображения, чтобы указывать измеренное местоположение, или изображения, чтобы указывать считанное местоположение (например, местоположение установки передатчика 200-1 внутренней установки), и изображение отображается дисплейным блоком 440.
Устройство 100 обеспечения информации о местоположении дополнительно содержит блок 450 связи для выполнения обмена данными с внешней стороной, например, локальным сервером 204, действующим как сервер обеспечения информации о местоположении, под контролем блока 414 управления.
В конфигурации, проиллюстрированной на Фиг.13, хотя не ограниченной следующим, в обработке сигнала между приемом сигнала определения местоположения и генерацией информации отображения, антенна 402, РЧ входная схема 404, понижающий преобразователь 406 и АЦП 408 образованы аппаратными средствами, а обработка в каждом из процессора 410 базовой полосы и навигационного процессора 430 может быть выполнена согласно программе, сохраненной в памяти 420. Однако, в отношении обработки в блоке 412 коррелятора, блок 412 коррелятора может быть конфигурирован для реализации обработки, основанной на аппаратных средствах, вместо программного обеспечения.
Со ссылкой на Фиг.14 ниже описана работа устройства 100 обеспечения информации о местоположении. На Фиг.14 представлена блок-схема, показывающая этапы обработки, которая должна выполняться процессором 410 базовой полосы и навигационным процессором 430 устройства 100 обеспечения информации о местоположении.
На этапе S610 устройство 100 обеспечения информации о местоположении получает (отслеживает и захватывает) сигнал определения местоположения. Более конкретно, процессор 410 базовой полосы принимает ввод принятого сигнала местоположения (цифровым образом преобразованные данные) от АЦП 408. Затем процессор 410 базовой полосы генерирует, в качестве копий псевдошумовых кодов, множество кодовых комбинаций, имеющих различные фазы кодов, отражающие возможную задержку, и определяет присутствие или отсутствие корреляции между принятым сигналом определения местоположения и каждой из кодовых комбинаций. Например, число кодовых комбинаций, которые должны генерироваться, равно умноженному на два отсчету битов битовых комбинаций. В качестве примера, в случаях, где частота элементарных посылок равна 1023 бита, могут генерироваться 2046 кодовых комбинаций, имеющих последовательную задержку или разность фаз кода в 1/2 битов. Затем выполняется корреляционная обработка каждой из кодовых комбинаций с принятым сигналом. В корреляционной обработке, если выход, имеющий интенсивность, равную или превышающую предопределенное значение, обнаружен в одной из кодовых комбинаций, процессор 410 базовой полосы может захватить кодовую комбинацию и идентифицировать один из спутников, который излучает принимаемый сигнал определения местоположения, основываясь на захваченной кодовой комбинации. Имеется только один псевдошумовой код, имеющий битовую последовательность захваченной кодовой комбинации. Таким образом, идентифицируется псевдошумовой код, используемый для формирования принятого сигнала определения местоположения как кодированного сигнала расширенного спектра.
Как отмечено ниже, корреляционная обработка принятого и полученного сигнала с каждой из множества копий кодовых комбинаций, сгенерированных в устройстве 100 обеспечения информации о местоположении, может также быть реализована как параллельная обработка, как описано ниже.
На этапе S612 процессор 410 базовой полосы идентифицирует источник излучения принятого сигнала определения местоположения. Более конкретно, блок 416 определения идентифицирует источник излучения принятого сигнала определения местоположения, основываясь на PRN-ID, ассоциированном с одним из передатчиков, которому назначена псевдошумовая кодовая комбинация, используемая при модуляции для генерации принимаемого сигнала определения местоположения (например, с использованием данных, сохраненных в памяти 420 на Фиг.13). Если определено, что принимаемый сигнал определения местоположения излучается из внешней области, процедура управления переходит к этапу S620. Если определено, что принимаемый сигнал определения местоположения излучается из внутренней области, процедура управления переходит к этапу S630. В противном случае, если определено, что принятый сигнал определения местоположения содержит множество сигналов определения местоположения, излучаемых как из внешней области, так и из внутренней области, процедура управления переходит к этапу S640.
На этапе S620 устройство 100 обеспечения информации о местоположении демодулирует сигнал определения местоположения, чтобы получить данные, включенные в него. Более конкретно, блок 432 определения внешнего местоположения навигационного процессора 430 демодулирует сигнал определения местоположения с использованием кодовой комбинации, временно сохраненной в памяти 420 (кодовой комбинации, захваченной вышеописанным способом; далее "захваченная кодовая комбинация"), чтобы получить навигационное сообщение из подкадра, образующего сигнал определения местоположения. Затем, на этапе S622, блок 432 определения внешнего местоположения подвергает 4 или более полученных сигналов определения местоположения обработке навигационного сообщения, в качестве предварительной обработки определения местоположения, обычным способом.
Затем на этапе S624, на основе результата вышеописанной обработки, блок 432 определения внешнего местоположения выполняет обработку для вычисления местоположения устройства 100 обеспечения информации о местоположении. Например, в случаях, когда устройство 100 обеспечения информации о местоположении принимает сигналы определения местоположения, излучаемые от 4 или более спутников, выполняется вычисление расстояния с использованием спутниковой орбитальной информации, информации времени часов и другой информации, включаемой в навигационные сообщения, демодулируемые из соответствующих GPS сигналов определения местоположения.
В противном случае, если на этапе S612 устройство 100 обеспечения информации о местоположении принимает сигнал определения местоположения, излучаемый от спутника (внешний сигнал), и сигнал определения местоположения от передатчика внутренней установки (внутренний сигнал), устройство 100 обеспечения информации о местоположении демодулирует сигналы определения местоположения, чтобы получить данные, включенные в них, на этапе S640. Более конкретно, блок 432 определения внешнего местоположения демодулирует сигналы определения местоположения, посланные из процессора 410 базовой полосы, с использованием захваченной кодовой комбинации, чтобы получить данные в подкадре, составляющем каждый из сигналов определения местоположения. В этом случае устройство 100 обеспечения информации о местоположении работает в так называемом "гибридном режиме", потому что оно принимает как сигнал определения местоположения от спутника, так и сигнал определения местоположения от передатчика внутренней установки. Таким образом, навигационное сообщение, имеющее данные о времени часов, может быть получено из сигнала определения местоположения от спутника, а данные, имеющие информацию о местоположении, такую как значения координат, могут быть получены из сигнала определения местоположения от передатчика внутренней установки. Более определенно, на этапе S642, блок 434 определения внутреннего местоположения выполняет обработку данных обнаружения, таких как номер этажа, широта, долгота и высота, из сигнала определения местоположения, излучаемого от передатчика 200-1 внутренней установки. Далее, блок 434 определения внутреннего местоположения получает навигационное сообщение из сигнала определения местоположения, излучаемого от GPS спутника, и выполняет обработку навигационного сообщения. Затем процедура управления переходит к этапу S624. На этапе S624 выполняется операция выбора одного из сигналов определения местоположения, который будет использоваться в определении местоположения, на основе, например, соответствующих интенсивностей внутреннего сигнала и внешнего сигнала. Например, если интенсивность внутреннего сигнала больше, чем интенсивность внешнего сигнала, выбирается внутренний сигнал, и значения координат, включенные во внутренний сигнал, используются в качестве местоположения устройства 100 обеспечения информации о местоположении.
В противном случае, если на этапе S612 определено, что источником излучения принятого сигнала определения местоположения является внутренний источник, и интенсивность внутреннего сигнала равна или больше, чем заданный уровень, то устройство 100 обеспечения информации о местоположении демодулирует сигнал определения местоположения, чтобы получить данные, включенные в него, на этапе S630. Более конкретно, блок 434 определения внутреннего местоположения демодулирует сигнал определения местоположения, посланный из процессора 410 базовой полосы, с использованием захваченной кодовой комбинации, чтобы получить данные сообщения в подкадре, составляющем сигнал определения местоположения. Эти данные сообщения являются данными, включенными в сигнал определения местоположения, излучаемый от передатчика внутренней установки, в качестве замены для навигационных сообщений, включаемых в сигналы определения местоположения, излучаемые от спутников.
Затем на этапе S632 блок 434 определения внутреннего местоположения получает значения координат из данных сообщения (то есть получает данные для идентификации местоположения установки передатчика внутренней установки (например, номер этажа, широту, долготу и высоту)). Затем процедура переходит к этапу S650.
Если устройство 100 обеспечения информации о местоположении принимает сообщение короткого ID или сообщение среднего ID на этапе S630, то устройство 100 обеспечения информации о местоположении демодулирует сигнал определения местоположения, чтобы получить данные, включенные в него, на этапе S630. Затем на этапе S632 устройство 100 обеспечения информации о местоположении передает сообщение короткого ID к локальному серверу 204 через сеть, на основе сообщения среднего ID, и получает информацию о местоположении, соответствующую сообщению короткого ID.
На этапе S650, основываясь на результате определения местоположения, навигационный процессор 430 выполняет обработку для отображения информации о местоположении на дисплейном блоке 440. Более конкретно, навигационный процессор 430 генерирует данные изображения для индикации полученной координаты или данных для индикации местоположения установки передатчика 200-1 внутренней установки и отсылает данные в дисплейный блок 440. На основе этих данных дисплейный блок 440 отображает информацию о местоположении устройства 100 обеспечения информации о местоположении 100 на дисплее.
Со ссылкой на Фиг.15 ниже описан режим отображения информации о местоположении устройства 100 обеспечения информации о местоположении. На Фиг.15 представлена диаграмма, показывающая экран дисплея на дисплейном блоке 440 устройства 100 обеспечения информации о местоположении. Когда устройство 100 обеспечения информации о местоположении принимает сигналы определения местоположения, излучаемые от GPS спутников во внешней области, дисплейный блок 440 отображает пиктограмму 710, указывающую, что информация о местоположении получена на основе GPS сигналов определения местоположения. Затем, когда пользователь устройства 100 обеспечения информации о местоположении перемещается во внутреннюю область, устройство 100 обеспечения информации о местоположении становится неспособным принимать сигналы определения местоположения, излучаемые от GPS спутников. Вместо этого 100 устройство обеспечения информации о местоположении принимает излучаемый сигнал, например, от передатчика 200-1 внутренней установки. Этот сигнал передается в том же самом режиме, что и режим сигналов определения местоположения, излучаемых от GPS спутников, как упомянуто выше. Таким образом, устройство 100 обеспечения информации о местоположении выполняет обработку для этого сигнала способом, подобным обработке, которая выполняется, когда принимаются сигналы определения местоположения от GPS спутников. После того, как устройство 100 обеспечения информации о местоположении получит информацию о местоположении из сигнала, дисплейный блок 440 будет отображать пиктограмму 720, указывающую, что информация о местоположении получена на основе сигнала, излучаемого от передатчика, установленного во внутренней области.
Как описано выше, в местоположении, где невозможно принимать радиоволны, таком как внутренняя область здания или подземной торговой зоны, устройство 100 обеспечения информации о местоположении в первом варианте осуществления действует, чтобы принимать радиоволны, излучаемые от передатчика, установленного там (например, одного из передатчиков 200-1, 200-2, 200-3 или один из 200-4, 200-5, 200-6 внутренней установки). Затем устройство 100 обеспечения информации о местоположении действует, чтобы получить информацию, идентифицирующую местоположение передатчика (например, значения координат или почтовый адрес), и отобразить информацию на дисплейном блоке 440. На основе отображенной информации пользователь устройства 100 обеспечения информации о местоположении может знать текущее местоположение. Таким образом, становится возможным предоставлять информацию о местоположении даже в местах, где невозможно непосредственно принимать спутниковые сигналы определения местоположения.
Это позволяет гарантировать устойчивый прием сигнала во внутренней области и предоставлять информацию о местоположении со стабильной точностью порядка нескольких метров даже во внутренней области.
Кроме того, время часов на земле (время часов передатчика, такого как передатчик 200-1 внутренней установки) и время часов спутника могут быть независимыми друг от друга, то есть, не обязательно должны быть синхронизированными друг с другом. Таким образом, становится возможным не увеличивать расходы на производство передатчика внутренней установки. Также нет необходимости синхронизировать время часов множества передатчиков внутренней установки, что облегчает системное управление.
Информация для непосредственной идентификации местоположения установки каждого из множества передатчиков внутренней установки включена в сигнал, передаваемый от каждого из передатчиков внутренней установки, что исключает потребность в вычислении информации о местоположении из сигналов, излучаемых от множества спутников. Таким образом, становится возможным получить сигнал определения местоположения на основе сигнала, излучаемого от одного из передатчиков внутренней установки.
Далее, местоположение приема сигнала может быть идентифицировано путем приема сигнала, излучаемого от одного из передатчиков внутренней установки, что позволяет более просто реализовать систему обеспечения информации о местоположении по сравнению с обычными спутниковыми системами определения положения, такими как GPS.
В устройстве 100 обеспечения информации о местоположении аппаратные средства, реализующие обычные системы определения местоположения, могут использоваться для приема сигнала, передаваемого от передатчика 200-1 внутренней установки, не требуя специализированных аппаратных средств, и обработка сигнала может быть реализована путем изменения или модифицирования программного обеспечения. Таким образом, нет необходимости начинать разработку аппаратных средств с нуля, чтобы использовать методы, связанные с первым вариантом осуществления. Это позволяет не увеличивать стоимость устройства 100 обеспечения информации о местоположении 100, что обеспечивает популяризацию устройства 100 обеспечения информации о местоположении. Далее, становится возможным предоставить устройство обеспечения информации о местоположении, позволяющее не увеличивать размер схемы и сложность в схемной конфигурации.
Более конкретно, память 420 устройства 100 обеспечения информации о местоположении хранит предопределенные PRN-ID и кодовые комбинации для передатчиков внутренней установки и/или спутников в ассоциированном соотношении. Устройство 100 обеспечения информации о местоположении действует, согласно программе, чтобы выполнять обработку для определения того, излучаются ли принимаемые радиоволны от спутников или от передатчика внутренней установки, на основе PRN-ID. Эта программа реализуется блоком обработки, таким как процессор базовой полосы. Альтернативно, устройство 100 обеспечения информации о местоположении может быть конфигурировано путем замены схемного элемента для определения на схемный элемент, включающий в себя функцию, которая должны быть реализована программой.
Если устройство 100 обеспечения информации о местоположении реализовано как мобильный телефон, то получаемая информация может храниться в энергонезависимой памяти 420, такой как флэш-память. Тогда, если вызов посылается из мобильного телефона, то данные, хранимые в памяти 420, могут посылаться получателю. В этом случае, информация о местоположении вызывающего абонента, то есть информация о местоположении, полученная от передатчика внутренней установки устройством 100 обеспечения информации о местоположении, передается к базовой станции, транслирующей вызов. Базовая станция сохраняет информацию о местоположении вместе с датой/временем приема как регистрацию вызова. Далее, если вызывающий абонент является контактным номером экстренного вызова (например, 110 в Японии), информация о местоположении вызывающего абонента может непосредственно оповещаться. Таким образом, оповещение вызывающего абонента с мобильного телефона может быть реализовано тем же самым образом, как это имеет место в случае обычного оповещения вызывающего абонента со стационарного телефона при экстренном контакте.
В отношении передатчика, устанавливаемого в определенном местоположении, система обеспечения информации о местоположении реализуется с использованием передатчика, способного излучать сигнал, подобный сигналу, излучаемому передатчиком, установленным на спутнике для определения местоположения. Таким образом, становится возможным исключить необходимость начинать разработку передатчика с нуля.
В системе 10 обеспечения информации о местоположении согласно первому варианту осуществления, сигнал расширенного спектра используется в качестве сигнала определения местоположения. При передаче сигнала расширенного спектра можно уменьшить электрическую энергию, приходящуюся на частоту. Таким образом, по сравнению с обычным RF маркером, управление радиоволной облегчается. Это позволяет облегчить установку системы обеспечения информации о местоположении.
В передатчике 200-1 внутренней установки параметр настройки может изменяться после его установки. Таким образом, например, данные ID местоположения для идентификации местоположения установки могут быть совместно перезаписаны после установки, что позволяет упростить процесс установки. Далее, в числе информации, передаваемой как сообщения, "рекламные данные", "информация трафика", "информация о погоде" и/или "информация о бедствиях (например, информация о землетрясении)" могут быть предоставлены приемнику, причем эти данные перезаписываются в реальном времени. Таким образом, могут быть реализованы различные услуги. Дополнительно, в передатчике 200-1 внутренней установки встроенное программное обеспечение FPGA 245 для выполнения обработки сигнала может непосредственно перезаписываться. Таким образом, те же самые аппаратные средства могут использоваться в схемах связи (схемах модуляции) в различных системах определения положения. Кроме того, использование сообщения короткого ID и сообщения среднего ID обеспечивает возможность получения различной относящейся к местоположению информации от локального сервера 204.
Первая модификация приемника
Вместо конфигурирования блока 412 коррелятора, предусмотренного в устройстве 100 обеспечения информации о местоположении, может быть использовано множество корреляторов. В этом случае обработка для сопоставления копий с сигналами определения местоположения выполняется одновременно параллельным способом, так что время вычислений для информации о местоположении может быть сокращено.
На Фиг.14 представлена блок-схема, показывающая конфигурацию вышеупомянутой модификации устройства 100 обеспечения информации о местоположении.
Устройство 1000 обеспечения информации о местоположении согласно модифицированному варианту осуществления содержит антенну 1010; полосовой фильтр 1020, электрически соединенный с антенной 1010; малошумящий усилитель (МШУ) 1030, электрически соединенный с полосовым фильтром 1020; понижающий преобразователь 1040, электрически соединенный с малошумящим усилителем 1030; полосовой фильтр 1050, электрически соединенный с понижающим преобразователем 1040; АЦП 1060, электрически соединенный с полосовым фильтром 1050; параллельный коррелятор 1070, составленный из множества корреляторов и электрически соединенный с АЦП 1060; процессор 1080, электрически соединенный с параллельным коррелятором 1070; и память 1090, электрически соединенную с процессором 1080.
Параллельный коррелятор 1070 содержит n корреляторов 1070-1 - 1070-n. Корреляторы действуют, на основе управляющего сигнала с выхода процессора 1080, чтобы выполнять обработку сопоставления каждого из множества принятых сигналов определения местоположения с соответствующими из множества кодовых комбинаций, генерированных для демодуляции сигнала определения местоположения, одновременно параллельным способом.
Более конкретно, процессор 1080 действует, чтобы выдать инструкцию для генерации множества кодовых комбинаций, отражающих возможную задержку, возникающую в псевдошумовом коде (имеющем последовательно задержанные фазы кода), на корреляторы параллельного коррелятора 1070. Например, в существующей системе GPS, эта инструкция соответствует числу спутников×2×1023 (длина псевдошумовой кодовой комбинации, которая должна использоваться). Согласно инструкции, выданной на каждый из корреляторов параллельного коррелятора 1070, параллельный коррелятор 1070 генерирует множество кодовых комбинаций, отличающихся фазой кода, с использованием псевдошумовых комбинаций, установленных на спутниках. Следовательно, во всех генерированных кодовых комбинациях, имеется одна кодовая комбинация, идентичная псевдошумовой кодовой комбинации, используемой для модуляции принятого сигнала определения местоположения. Поэтому псевдошумовая кодовая комбинация может быть мгновенно идентифицирована при помощи параллельного коррелятора 1070, состоящего из множества корреляторов, требуемых для выполнения обработки сопоставления с использованием кодовых комбинаций. Эта операция может также применяться к операции, выполняемой, когда устройство 100 обеспечения информации о местоположении принимает сигнал от передатчика внутренней установки. В этом случае, даже если пользователь устройства 100 обеспечения информации о местоположении находится во внутренней области, информация о его местоположении может быть мгновенно получена.
Другими словами, параллельный коррелятор 1070 может выполнить обработку сопоставления для всех псевдошумовых кодовых комбинаций, установленных на спутниках, и псевдошумовых кодовых комбинаций, установленных в передатчиках внутренней установки, одновременно параллельным способом, наилучшим образом. Далее, даже в случаях, когда обработка сопоставления не выполняется для всех псевдошумовых кодовых комбинаций, установленных на спутниках и передатчиках внутренней установки, с учетом отношения между числом корреляторов и числами псевдошумовых кодовых комбинаций, назначенных спутникам и передатчикам внутренней установки, время, требуемое для получения информации местоположения, может быть значительно уменьшено на основе одновременной параллельной обработки с использованием множества корреляторов.
В этом модифицированном варианте осуществления спутники и передатчики внутренней установки передают сигналы в схеме расширенного спектра, то есть той же самой схеме связи, так что псевдошумовые кодовые комбинации, принадлежащие той же самой категории, могут использоваться в качестве назначенных спутникам и передатчикам внутренней установки. Таким образом, параллельный коррелятор может использоваться как для сигнала от каждого из спутников, так и для сигнала от одного из передатчиков внутренней установки, чтобы выполнить обработку приема одновременно, параллельным образом, без особого различия между сигналами.
Хотя конкретно не ограничено следующим, в устройстве 1000 обеспечения информации о местоположении, показанном на Фиг.16, антенна 1010, полосовой фильтр 1020, малошумящий усилитель (МШУ) 1030, понижающий преобразователь 1040, полосовой фильтр 1050, АЦП 1060 и параллельный коррелятор 1070 для обработки сигнала между приемом сигнала местоположения и генерацией информации для отображения на дисплейном блоке (который не иллюстрируется на Фиг.16) могут быть сформированы аппаратными средствами, а обработка для определения местоположения (процесс, проиллюстрированный на Фиг.12) может быть выполнена процессором 1080 согласно программе, сохраненной в памяти 1090.
Вторая модификация приемника
Второй модифицированный вариант осуществления настоящего изобретения описан ниже. Второй модифицированный вариант осуществления будет описан на основе примера, где в качестве устройства 100 обеспечения информации о местоположении использован мобильный телефон.
Устройство обеспечения информации о местоположении согласно второму модифицированному варианту осуществления реализуется путем модифицирования программного обеспечения обычного мобильного телефона. В устройстве для обеспечения информации о местоположении согласно второму модифицированному варианту осуществления, где сообщение короткого ID передается к локальному серверу 204 в качестве устройства обеспечения информации о передатчике внутренней установки на основе сообщения среднего ID, вместо идентификации местоположения устройства обеспечения информации о местоположении на основе данных, включенных в сигнал от передатчика внутренней установки, процесс получения информации о местоположении выполняется на основе информационного обмена с использованием мобильного телефона. Во втором модифицированном варианте осуществления местоположение мобильного телефона может также быть идентифицировано на основе сообщения короткого ID и сообщения среднего ID. В то время как положение мобильного телефона, в общем случае, определяется как область базовой станции, которая принимает сигнал, излучаемый от мобильного телефона, мобильный телефон, во втором модифицированном варианте осуществления, может определить положение мобильного телефона как таковое. Например, даже в локальной области, где имеется небольшое число базовых станций, становится возможным точно определить местоположение мобильного телефона, на основе сообщения короткого ID и сообщения среднего ID.
Во втором модифицированном варианте осуществления конфигурация или процесс для выполнения определения местоположения на основе сигналов определения местоположении от спутников являются теми же самыми, что и в первом варианте осуществления. Таким образом, ниже описывается операция, выполняемая, когда сообщение короткого ID и сообщение среднего ID принимаются от передатчика внутренней установки.
На Фиг.17 представлена диаграмма, показывающая состояние использования устройства обеспечения информации о местоположении согласно второму модифицированному варианту осуществления. Устройство обеспечения информации о местоположении реализовано как мобильный телефон 1200. Мобильный телефон 1200 приспособлен для приема сигнала определения местоположения, излучаемого передатчиком 1210 внутренней установки. Передатчик 1210 внутренней установки связан с Интернетом 1220. Кроме того, сервер 1230 обеспечения информации (эквивалентный локальному серверу 204 на Фиг.1), способный предоставлять информацию о передатчике 1210 внутренней установки, связан с Интернетом 1220. Следующее описание будет сделано в предположении, что множество сообщений короткого ID и относящаяся к местоположению информация, ассоциированная с соответствующими сообщениями короткого ID, зарегистрированы в базе данных сервера 1230 обеспечения информации. Кроме того, базовая станция 1240, которая может осуществлять связь с мобильным телефоном 1200, соединена с Интернетом 1220.
После приема сигнала, излученного передатчиком 1210 внутренней установки, мобильный телефон 1200 получает сообщение короткого ID и сообщение среднего ID из принятого сигнала. На основе сообщения среднего ID, мобильный телефон 1200 передает сообщение короткого ID на сервер 1230 обеспечения информации.
После распознавания принятого сообщения короткого ID сервер 1230 обеспечения информации обращается к базе данных, связанной с сообщением короткого ID, и считывает относящуюся к местоположению информацию, ассоциированную с ID. Сервер 1230 обеспечения информации передает данные к базовой станции 1240, и затем базовая станция 1240 передает данные. После обнаружения входящих данных, мобильный телефон 1200 может получить местоположение передатчика 1210 внутренней установки и информацию, относящуюся к местоположению, на основе принятых данных, согласно операции просмотра, выполняемой пользователем мобильного телефона 1200.
Со ссылкой на Фиг.18 описана конфигурация мобильного телефона 1200. На Фиг.18 представлена блок-схема, показывающая конфигурацию аппаратных средств портативного телефона 1200. Мобильный телефон 1200 содержит антенну 1308, устройство 1302 связи, центральный процессор 1310, операционную кнопку 1320, камеру 1340, флэш-память 1344, RAM 1346, ROM 1348 данных, накопитель 1380 карты памяти, схему 1370 обработки речевого сигнала, микрофон 1372, динамик 1374, дисплейный блок 1350, светодиодное устройство (LED) 1376, интерфейс 1378 передачи данных и вибратор 1384, которые электрически соединены друг с другом.
Сигнал, принятый антенной 1308, передается к центральному процессору 1310 устройством 1302 связи. Центральный процессор 1310 действует, чтобы передать сигнал в схему 1370 обработки речевого сигнала. Затем схема 1370 обработки речевого сигнала действует для выполнения предопределенной обработки сигнала и затем посылает обработанный сигнал в динамик 1374. Динамик 1374 действует, основываясь на обработанном сигнале, для вывода голоса.
Микрофон 1372 действует для приема голоса, направленного в мобильный телефон 1200, и вывода сигнала, соответствующего голосу, на схему 1370 обработки речевого сигнала. Схема 1370 обработки речевого сигнала действует, основываясь на сигнале, чтобы выполнить предопределенную обработку сигнала для вызова и послать обработанный сигнал в центральный процессор 1310. Затем центральный процессор 1310 действует, чтобы преобразовать обработанные данные в данные передачи и отослать данные передачи в устройство 1302 связи. Устройство 1302 связи действует, чтобы передать сигнал через антенну 1308, и затем базовая станция 1240 действует, чтобы принять сигнал.
Флэш-память 1344 приспособлена для сохранения в ней данных, посланных из центрального процессора 1310. И наоборот, центральный процессор 1310 действует, чтобы считывать данные, сохраненные во флэш-памяти 1344, и выполнять предопределенную обработку с использованием данных.
RAM 1346 приспособлена, чтобы временно хранить данные, сформированные центральным процессором 1310, на основе ручной операции, выполняемой по отношению к операционной кнопке 1320. ROM 1348 данных предварительно сохраняет данные или программу, чтобы позволить мобильному телефону 1200 выполнять предопределенную операцию. Центральный процессор 1310 действует для считывания данных или программы из ROM 1348 данных, чтобы позволить мобильному телефону 1200 выполнять предопределенную операцию.
Накопитель 1380 карты памяти приспособлен для приема загрузки карты 1382 памяти. Накопитель 1380 карты памяти 1382 действует, чтобы считывать данные, сохраненные в загруженной карте 1382 памяти, и отсылать считанные данные в центральный процессор 1310. Накопитель 1380 карты памяти также действует, чтобы реверсивно записывать данные, выведенные центральным процессором 1310, в область хранения данных, обеспеченную на карте памяти 1382.
Схема 1370 обработки речевого сигнала действует, чтобы выполнять обработку для сигнала, который будет использоваться для вызова, как упомянуто выше. Центральный процессор 1310 и схема 1370 обработки речевого сигнала могут быть объединены вместе.
Дисплейный блок 1350 приспособлен для того, чтобы на основе данных с выхода центрального процессора 1310 визуализировать изображение, определяемое данными. Например, в случаях, где флэш-память 1344 сохраняет данные (например, URL) для доступа к серверу 1230 обеспечения информации, дисплейный блок 1350 отображает URL.
Светодиодное устройство 1376 приспособлено для реализации предопределенного действия светового излучения на основе сигнала от центрального процессора 1310. Например, светодиодное устройство 1376 может быть конфигурировано с возможностью индикации множества цветов. В этом случае светодиодное устройство 1376 действует на основе данных, включенных в сигнал с выхода центрального процессора 1310, чтобы излучать свет с цветом, ассоциированным с данными.
Интерфейс 1378 передачи данных приспособлен для приема присоединения кабеля для передачи данных. Интерфейс 1378 передачи данных действует для передачи сигнала с выхода центрального процессора 1310 в кабель, присоединенный к нему. Интерфейс 1378 передачи данных также действует, чтобы передать данные, принятые через кабель, к центральному процессору 1310.
Вибратор 1384 приспособлен для генерации колебаний на предопределенной частоте, основываясь на сигнале с выхода центрального процессора 1310. Принцип работы мобильного телефона 1200 хорошо известен специалистам в данной области техники, поэтому его подробное описание опущено.
Мобильный телефон 1200 дополнительно содержит антенну 1316 для приема сигнала определения местоположения (позиционирования) и входной блок 1314 для приема сигнала позиционирования (определения местоположения).
Входной блок 1314 для приема сигнала определения местоположения содержит антенну 402, РЧ входную схему 404, понижающий преобразователь 406 и АЦП 408, которые были описаны как компоненты, реализованные аппаратными средствами в устройстве 100 обеспечения информации о местоположении, проиллюстрированном на Фиг.13. Далее, обработка в процессоре 410 базовой полосы и навигационном процессоре 430, которая была описана как обработка, реализуемая программным обеспечением в устройстве 100 обеспечения информации о местоположении, может быть выполнена схемой 1312 обработки определения местоположения в центральном процессоре 1310 согласно программе, загруженной из флэш-памяти 1344 в RAM 1346. В этой конфигурации блок 412 коррелятора может быть конфигурирован для реализации в нем обработки на основе аппаратных средств, вместо программного обеспечения. Кроме того, также могут использоваться те же самые конфигурации аппаратного и программного обеспечения, что и в устройстве 1000 обеспечения информации о местоположении, проиллюстрированном на Фиг.16.
Со ссылкой на Фиг.19 далее описана конкретная конфигурация сервера 1230 обеспечения информации. На Фиг.19 представлена блок-схема, показывающая конфигурацию аппаратных средств сервера 1230 обеспечения информации. Например, сервер 1230 обеспечения информации может быть реализован обычной компьютерной системой.
В качестве основных аппаратных средств сервер 1230 обеспечения информации содержит центральный процессор 1410; устройство ввода, включая мышь 1420 и клавиатуру 1430, для приема ввода, осуществляемого пользователем сервера 1230 обеспечения информации; RAM 1440 для временного хранения данных, генерируемых на основе программы, выполняемой центральным процессором 1410, или ввода данных через мышь 1420 или клавиатуру 1430; жесткий диск 1450 для хранения большого объема данных энергонезависимым образом; накопитель 1460 на CD-ROM; монитор 1480 и интерфейс 1470 связи. Эти компоненты аппаратных средств связаны друг с другом шиной данных. CD-ROM 1462 присоединен к накопителю 1460 на CD-ROM.
Обработка в компьютерной системе, реализующей сервер 1230 обеспечения информации, реализуется аппаратными средствами и программным обеспечением, выполняемым центральным процессором 1410. Программное обеспечение может быть предварительно сохранено на жестком диске 1450. Альтернативно, программное обеспечение может быть сохранено на CD-ROM 1462 или другом носителе записи данных как коммерчески доступный программный продукт. Альтернативно, программное обеспечение может быть того типа, который обеспечивается как загружаемый программный продукт поставщиком информации, связанным с Интернетом. Программное обеспечение считывается с носителя записи данных накопителем 1460 на CD-ROM или другим устройством чтения данных или загружается через интерфейс 1470 связи и временно сохраняется на жестком диске 1450. Затем программное обеспечение считывается с жесткого диска 1450 центральным процессором 1410 и сохраняется в RAM 1440 в форме исполняемой программы. Центральный процессор 1410 действует для выполнения программы.
Аппаратные средства компьютерной системы, реализующей сервер 1230 обеспечения информации, проиллюстрированный на Фиг.19, являются обычно используемым типом. Таким образом, можно сказать, что существенная часть сервера 1230 обеспечения информации во втором модифицированном варианте осуществления является программным обеспечением, сохраненным в RAM 1440, на жестком диске 1450, CD-ROM 1460 или другом носителе записи данных, или программным обеспечением, загружаемым через сеть. Работа аппаратных средств компьютерной сети хорошо известна, поэтому ее подробное описание опущено.
Носитель записи не ограничен CD-ROM 1462 и жестким диском 1450, но может быть носителем, постоянно несущим программу, таким как магнитная лента, аудиокассета, оптический диск (МО (магнитный оптический диск)/MD (мини-диск)/DVD (цифровой универсальный диск)), IC (интегральная схема) карта (включая карту памяти), оптическая карта или полупроводниковая память, включая ROM с масочным программированием, EEPROM и флэш ROM.
Как используется здесь, термин "программа" не ограничен программой, исполняемой непосредственно центральным процессором 1410, но содержит исходный тип программы, сжатую программу и зашифрованную программу.
Сообщения короткого ID и относящаяся к местоположению информация, ассоциированная с сообщениями короткого ID, зарегистрированы на жестком диске 1450, как упомянуто выше.
Как описано выше, в системе обеспечения информации о местоположении согласно второму модифицированному варианту осуществления, сигнал, излучаемый передатчиком внутренней установки, установленным на земле или под землей, включает в себя данные о сообщении короткого ID и сообщении среднего ID, в зависимости от ситуаций. Эти данные хранятся в серверном устройстве для предоставления информации о местоположении передатчика внутренней установки, в ассоциации с относящейся к местоположению информацией. Мобильный телефон 1200, функционирующий как устройство обеспечения информации о местоположении, передает сообщение короткого ID к серверному устройству, чтобы получить информацию о местоположении передатчика внутренней установки или информацию, относящуюся к местоположению передатчика внутренней установки. Использование этого метода предоставления информации позволяет избавиться от необходимости того, чтобы информация о местоположении передатчика внутренней установки сохранялась самим передатчиком внутренней установки, и тем самым облегчить изменение местоположения передатчика внутренней установки.
Модификация сигнальных спецификаций IMES сигнала
Хотя спецификации IMES сигнала были описаны со ссылками на Фиг.5-12, также могут использоваться следующие спецификации IMES сигнала.
Следующее описание будет сделано прежде всего относительно различия между соответствующими сигнальными спецификациями модифицированного IMES сигнала и IMES сигнала, описанного со ссылками на Фиг.5-12.
i) Структура для обеспечения высокой надежности информации о внутреннем местоположении (предотвращение ошибочной синхронизации) и обеспечения высокой надежности информации о внутреннем местоположении (предотвращение ошибочного захвата)
В модифицированном IMES сигнале счетчик битов, имеющий заданную длину в битах, например, 3-битовую длину, обеспечен в каждом слове, кроме первого слова в кадре, и значение счета получает приращение каждый раз, когда передается каждое слово. Когда значение счета достигает 111, операция счета перезапускается с 000.
Преамбула сообщения передатчика внутренней установки, включенного в первое слово, установлена на значение, отличающееся от значения преамбулы GPS или QZSS сигнала.
Вышеупомянутые различные преамбулы позволяют быстро распознать ошибочный захват. Операция счета позволяет устранить ситуацию, где заданное соотношение между преамбулой и четности в конце слова становится условно удовлетворенными в положении ином, чем надлежащее положение, и будет неоднократно появляться, и достоверно обнаружить головную часть кадра, чтобы установить синхронизацию кадра так, чтобы препятствовать выводу ошибочной информации о местоположении.
ii) Флаг поддержки идентификации внутреннего/внешнего сигнала (экономия мощности приемника)
Постоянный поиск/захват/отслеживание внутренних и внешних сигналов множественным коррелятором накладывает большую нагрузку на устройство, требующее экономии мощности, такое как мобильный телефон. Таким образом, является желательным во внутренней области осуществлять поиск только внутреннего сигнала, а во внешней области осуществлять поиск спутникового сигнала, выполняя поиск кода для внутреннего сигнала с использованием, по меньшей мере, одного канала. 1-битовый флаг поддержки идентификации внешнего/внутреннего сигнала включен в сообщение внутреннего сигнала. Когда передатчик внутренней установки установлен во внешней области или в соте, граничащей с внешней областью, флаг устанавливается в "1". Приемник действует, когда флаг равен "1", чтобы начать поиск кода для захвата внешнего спутникового сигнала, а когда флаг равен "0", чтобы завершить поиск кода для захвата внешнего спутникового сигнала.
Флаг поддержки идентификации внешнего/внутреннего сигнала более конкретно описан ниже. Например, обычно используемый GPS приемник, установленный в мобильном телефоне, имеет восемь каналов, так что он способен одновременно захватывать/ отслеживать восемь спутников. Вообще, в таком приемнике, множество корреляторов используется, чтобы уменьшить время, требуемое для поисков частоты и кода для захвата спутниковых сигналов.
В качестве предпосылки к сокращению времени для получения информации о местоположении во время перемещения между внутренней и внешней областями, необходимо постоянно осуществлять поиск первого сигнала определения местоположения от спутника и второго сигнала определения местоположения от передатчика внутренней установки.
В этом нормальном состоянии, например, заданный процент (например, 20%; в вышеупомянутом 8-канальннм приемнике это соответствует двум каналам) корреляторов в приемнике выполняют поиск на основе PRN кодов, назначенных передатчикам внутренней установки, а оставшийся процент (например, 80%; в вышеупомянутом приемнике это соответствует шести каналам) корреляторов выполняют поиск на основе PRN кодов, назначенных спутникам.
Поиски постоянно выполняются в вышеупомянутых процентных соотношениях по следующей причине. Когда второй сигнал определения местоположения может быть захвачен, информация о местоположении может быть немедленно выведена из информации о местоположении, полученной из сообщения во втором сигнале определения местоположения. Таким образом, желательно постоянно выполнять поиск кода для передатчика внутренней установки, используя приблизительно 20% корреляторов. Если поиск, основанный на PRN кодах, назначенных передатчикам внутренней установки, постоянно не выполняется, то возникает следующая ситуация. Когда пользователь перемещается во внутреннюю область, и становится невозможно адекватным образом принять GPS сигналы, поиск на основе PRN кодов, назначенных передатчикам внутренней установки, начинается только после того, как поиск захвата спутниковых сигналов последовательно выполнен, и затем определено, что GPS сигналы не могут быть адекватным образом приняты. Таким образом, прежде чем перейти к получению информации о местоположении передатчика внутренней установки, сигналы определения местоположения от спутников принимаются, чтобы выполнить определение местоположения, так что выводится информация о местоположении, имеющая большую ошибку, вследствие влияний многолучевых и отраженных волн.
Далее, чтобы быстро захватить спутниковые сигналы, когда пользователь перемещается из внутренней области во внешнюю область, необходимо выполнить поиск спутниковых сигналов на основе PRN кодов от спутников, в дополнение к поиску на основе PRN кодов, назначенных передатчикам внутренней установки. В этом случае, желательно увеличить процент корреляторов, выполняющих поиск на основе PRN кодов, назначенных передатчикам внутренней установки. Например, предпочтительно, что 20% корреляторов используются для поиска на основе PRN кодов, назначенных спутнику, и 80% корреляторов используются для поиска на основе PRN кодов, назначенных передатчикам внутренней установки.
Однако, в устройстве обеспечения информации о местоположении с батарейным питанием, таком как мобильный телефон, не эффективно постоянно выполнять поиск и захват/отслеживание сигнала, используя все корреляторы. Если может быть известным, что пользователь определенно находится во внутренней области, то количество корреляторов, выполняющих поиск, может быть сокращено, чтобы сократить расход энергии. Например, даже если только приблизительно 20% корреляторов активизированы, то есть поиск передатчика внутренней установки выполняется с использованием только приблизительно двух каналов в вышеупомянутом 8-канальном приемнике, информация о местоположении может быть получена во внутренней области в пределах более короткого промежутка времени, не подвергая пользователя стрессу, при снижении энергопотребления батареи.
Поэтому "флаг поддержки идентификации внешнего/внутреннего сигнала" (BD бит) включается в сигнал, который будет передаваться от передатчика внутренней установки, причем BD бит установлен в "1" для одного или двух передатчиков внутренней установки, расположенных на границе, когда пользователь перемещается между внутренней и внешней областями, и в "0" для передатчика внутренней установки, расположенного в остальной части внутренней области (точно расположенного во внутренней области).
Приемник приспособлен для того, чтобы, когда BD бит равен "1", начать поиск внешних сигналов определения местоположения, и когда BD бит равен "0", завершить поиск. Таким образом, становится возможным удовлетворить как потребность в эффективном сокращении энергопотребления батареи, так и потребность в сокращении времени, требуемого для получения информации о местоположении во время перемещения между внутренней и внешней областями.
Сигнальные спецификации IMES сигнала
Структура модифицированного сигнала, который будет передаваться от передатчика 200-1 внутренней установки (модифицированного IMES сигнала), более конкретно описана ниже.
Модифицированный IMES сигнал имеет РЧ характеристику, соответствующую характеристике сигнала определения местоположения от спутника (например, C/A код L1-полосы GPS или QZSS). В то время как модифицированный IMES сигнал является тем же самым, что и спутниковый сигнал определения местоположения, в том, что структура навигационного сообщения имеет 30-битовое слово в качестве базового блока, он имеет разграниченную структуру короткого кадра, чтобы обеспечить более короткое TTRM. Этот факт является тем же самым, что в сигнальной спецификации IMES сигнала, описанного со ссылками на Фиг.5-12.
Таким образом, (1) РЧ характеристика является той же самой, что и описанная выше, и ее описание опущено. Следующее описание будет относиться к характеристике сообщения.
(3) Характеристика сообщения
(3-1) Структура слова
Одно слово имеет ту же самую длину слова, что и у спутникового сигнала определения местоположения, например, 30 битов. В случаях, где одно слово состоит из 30 битов, одно слово включает 21-битовые данные, 3-битовый счетчик слова и 6-битовую четность.
(3-2) Счетчик слова
Каждое слово, кроме первого слова в кадре, имеет счетчик слова. FPGA 245 передатчика 200-1 внутренней установки действует так, что каждый раз, когда передается каждое слово, значение счетчика получает приращение на заданное значение, например, на единицу.
Счетчик слова способствует идентификации разделителей слов и кадров. Чтобы способствовать идентификации разделителей, 3-битовый счетчик слова конфигурирован таким образом, что он не принимает то же значение, что значение 3 битов высшего порядка преамбулы, то есть он пропускает это значение.
(3-3) Код четности и (2-4) алгоритм четности и алгоритм проверки четности являются теми же самыми, что и в сигнальных спецификациях IMES сигнала, описанного со ссылками на Фиг.5-12.
(3-4) Структура кадра
На Фиг.20 представлена диаграмма, показывающая структуру кадра модифицированного IMES сигнала.
Один кадр состоит из целочисленного умножения слова и имеет следующий формат. Кадр, имеющий проиллюстрированную структуру, передается последовательно и периодически.
В 1-ом слове имеется преамбула, имеющая заданную длину в битах, например, 8-битовую длину, и за преамбулой следует ID типа сообщения (MID), имеющий заданную длину в битах, например, 3-битовую длину. Кроме 3-битового счетчика слова в каждом слове кроме первого слова в кадре и 6-битовой четности в каждом слове, все остальные биты являются битами данных.
Фиг.20 иллюстрирует случай, где один кадр состоит из одного слова, другой случай, где один кадр состоит из двух слов, и еще один случай, где один кадр состоит из трех слов.
Хотя модифицированный IMES сигнал, который будет передаваться от каждого из передатчиков 200-1 - 200-6 внутренней установки, стандартизирован со спутниковым сигналом определения местоположения с точки зрения структуры слова, он отличается от спутникового сигнала определения местоположения с точки зрения числа слов, составляющих один кадр. Более конкретно, один кадр модифицированного IMES сигнала состоит из множества слов, причем число слов меньше, чем число слов, включенных в один кадр спутникового сигнала определения местоположения.
(3-5) Преамбула
8-битовая преамбула, обеспеченная на переднем конце 1-ого слова в каждом кадре, имеет заданную битовую комбинацию.
Эта преамбула способствует идентификации разделителя кадра. В отличие от битовой комбинации преамбулы спутникового сигнала определения местоположения, битовая комбинация преамбулы модифицированного IMES сигнала конфигурирована, чтобы позволить отличить модифицированный IMES сигнал от сигнала определения местоположения GPS или QZSS спутника.
(3-7) ID типа сообщения (MID)
3-битовый ID типа сообщения (MID), обеспеченный после преамбулы 1-го слова в каждом кадре указывает на длину кадра и содержимое кадра, включающего 1-ое слово.
Сравнение между значением MID и длиной/содержимым кадра в модифицированном IMES сигнале такое, как показано на Фиг.6.
(3-6-1) Содержимое сообщения
(3-6-1-1) ID типа сообщения "000": информация о местоположении 1
Когда ID типа сообщения равен "000", длина кадра равна 3 словам, и содержимое кадра соответствует информации о местоположении.
На Фиг.21 представлена диаграмма, показывающая структуру кадра модифицированного IMES сигнала, когда ID типа сообщения равен "000". На Фиг.22 представлена таблица, показывающая соответствующие примеры содержимого данных в кадре, соответствующие значения битовой длины и LSB (младший бит) и диапазон, который будет выражен.
Со ссылками на Фиг.21 и 22 это содержимое описано ниже.
i) Номер этажа
С 12-го по 19-ый биты 1-го слова представляют номер этажа здания, где установлен передатчик внутренней установки, и единицей этого является "n-ый".
Это значение имеет битовую длину 8 битов и никакого кода. LSB указывает на 1-ый этаж. Установлен сдвиг -50-ый этаж, и выражен диапазон от -50-го этажа до +204-го этажа.
ii) Широта
С 1-го по 21-ый биты 2-го слова упорядочены на стороне MSB (старшего бита). Всего 23 бита, полученные добавлением 20-го и 21-го бита 1-го слова к 21 биту, представляют широту передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 180/1023 [градусов] до 0,000021 [градусов], что представляет от -90 градусов до +90 градусов. Это эквивалентно приблизительно 2,4 м в направлении «север-юг».
iii) Долгота
С 1-го по 21-го биты 3-го слова упорядочены на стороне MSB. Всего 24 бита, полученные добавлением с 22-го по 24-ый биты 1-го слова к 21 биту, представляют долготу передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 360/1024 [градусов] до 0,000021 [градусов], что представляет от -180 градусов до +180 градусов. Это эквивалентно приблизительно 2,4 м в направлении «восток - запад» по экватору.
(3-6-1-2) ID типа сообщения "001": информация о местоположении 2
Когда ID типа сообщения равен "001", длина кадра равна 4 словам, и содержимым кадра является информация о местоположении.
На Фиг.23 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "001".
На Фиг.24 представлена таблица, показывающая соответствующие примеры содержимого данных в кадре, соответствующие значения битовой длины и LSB, и диапазон, который будет выражен.
Со ссылкой на Фиг.23 и 24, это содержимое будет описано ниже.
i) Номер этажа
С 12-го по 20-ый биты 1-го слова представляют номер этажа здания, где установлен передатчик внутренней установки, и его единицей является "n-ый".
Это значение имеет битовую длину 9 битов и никакого кода. LSB указывает на 0,5-ый этаж. Установлен сдвиг -50-ый этаж, и выражен диапазон от -50-го этажа до +205-го этажа.
ii) Широта
С 4-го по 24-ый биты 2-го слова упорядочены на стороне MSB (старшего бита). Всего 24 бита, полученные добавлением с 18-го по 20-ый биты 4-го слова к 21 биту, представляют широту передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 180/1024 [градусов] до 0,000011 [градусов], что представляет от -90 градусов до +90 градусов. Это эквивалентно приблизительно 1,2 м в направлении «север-юг».
iii) Долгота
С 4-го по 24-ый биты 3-го слова упорядочены на стороне MSB. Всего 25 битов, полученных добавлением с 21-го по 24-ый биты 4-го слова к 21 биту, представляют долготу передатчика внутренней установки, и ее единицей является "градус".
Это значение имеет код. LSB находится в диапазоне от 360/1025 [градусов] до 0,000011 [градусов], что представляет от -180 градусов до +180 градусов. Это эквивалентно приблизительно 1,2 м в направлении «восток - запад» по экватору.
iv) Высота
С 1-го по 12-ый биты 4-го слова представляют высоту передатчика внутренней установки, и ее единицей является "м (метр)".
Это значение не имеет никакого кода. LSB указывает на 1 м. Установлено смещение -95 м, и выражен диапазон от -95 м до +4000 м.
(3-6-1-3) ID типа сообщения "011": Короткий ID
Когда ID типа сообщения равен "011", длина кадра равна 1 слову, и содержимым кадра является короткий ID (IDS).
На Фиг.25 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "011".
В кадре, соответствующем короткому ID, передается 12-битовое сообщение короткого ID. Этот кадр включает в себя «флаг поддержки идентификации внешнего/внутреннего сигнала» (BD бит).
Содержимое и использование сообщения короткого ID являются теми же самыми, что и у IMES сигнала, описанного в связи с фиг.11.
(3-6-1-4) ID типа сообщения "100": Средний ID
Когда ID типа сообщения равен "100", длина кадра равна 2 словам, и содержимым кадра является средний ID (IDM).
На Фиг.26 представлена диаграмма, показывающая структуру кадра, когда ID типа сообщения равен "100".
В кадре, соответствующем среднему ID, передается 12-битовое сообщение среднего ID и 21-битовое сообщение среднего ID. Этот кадр включает в себя «флаг поддержки идентификации внешнего/внутреннего сигнала» (BD бит).
Содержимое и использование сообщения среднего ID являются теми же самыми, что и у IMES сигнала, описанного в связи с фиг.12.
Таким образом, устройство 100-5 обеспечения информации о местоположении (например, мобильный телефон) действует, в ответ на прием короткого сообщения ID и среднего сообщения ID, чтобы послать запрос об относящейся к местоположению информации, соответствующей сообщениям, к локальному серверу 204 через сеть связи, чтобы получить относящуюся к местоположению информацию.
Как описано выше, согласно вариантам осуществления настоящего изобретения, по меньшей мере, один из следующих эффектов i) - v) может быть получен в зависимости от вариантов осуществления.
i) Стандартизация с GPS C/A сигналом
Конфигурации аппаратных средств каналов для приема внутренних и внешних (спутниковых) сигналов могут быть стандартизированы, так что становится возможным исключить необходимость в обеспечении специализированных каналов для внутренних и внешних сигналов. Таким образом, каналы для поиска/захвата/отслеживания внутренних и внешних сигналов могут более легко переключаться. Ресурс приемника может эффективно использоваться, что является выгодным для портативного устройства, имеющего существенные ограничения на потребление энергии, такого как мобильный телефон.
ii) Сокращение TTRM (время, чтобы прочитать сообщение)
Становится возможным уменьшить время от нажатия кнопки получения информации о местоположении пользователем до получения информации о местоположении.
iii) Гибкость в зависимости от намеченного использования
Обычный постоянный формат навигационного сообщения спутникового сигнала определения местоположения (например, GPS C/A сигнал) модифицирован так, что первое слово в кадре имеет информацию идентификации (ID типа сообщения), имеющую заданный бит, что обеспечивает возможность персоналу, устанавливающему передатчик, устанавливать содержимое и порядок/частоту передачи сообщения, подлежащего передаче, в зависимости от намеченного использования/цели.
iv) Обеспечение высокой надежности информации о внутреннем местоположении (предотвращение ошибочной синхронизации)
Возможность вывода ошибочной информации о местоположении из-за ошибочной синхронизации кадров может быть устранена путем выполнения синхронизации кадров согласно схеме настоящего изобретения. В то время как надежное получение информации о местоположении требуется для оповещения информации о местоположении при экстренной передаче сообщений, надежность схемы определения местоположения внутренней установки может быть улучшена путем использования схемы согласно настоящему изобретению.
v) Обеспечение высокой надежности информации о внутреннем местоположении (предотвращение ошибочного захвата)
Процесс согласно настоящему изобретению, выполняемый во время приема обычного спутникового сигнала определения местоположения (например, GPS C/A сигнал), позволяет распознать ошибочный захват на основе извлечения начального бита в процессе синхронизации кадров и поиска преамбулы.
Должно быть понятно, что приведенные выше варианты осуществления показаны и описаны только для иллюстрации, но описание не предназначено, чтобы толковаться в ограничивающем смысле. Соответственно, объем изобретения должен определяться следующими пунктами формулы изобретения и их юридическими эквивалентами, а не вышеизложенным описанием, и предполагается, что все изменения и модификации, выполненные в пределах объема изобретения, включены в него.
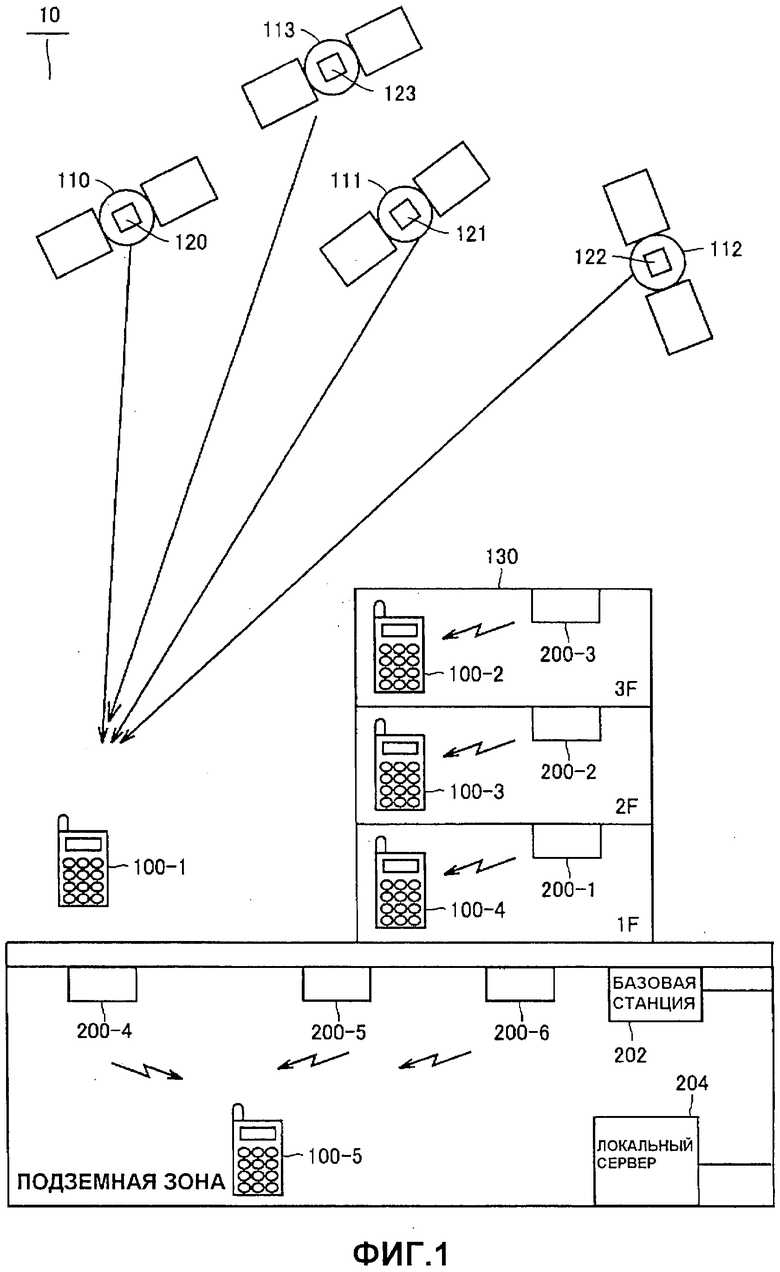
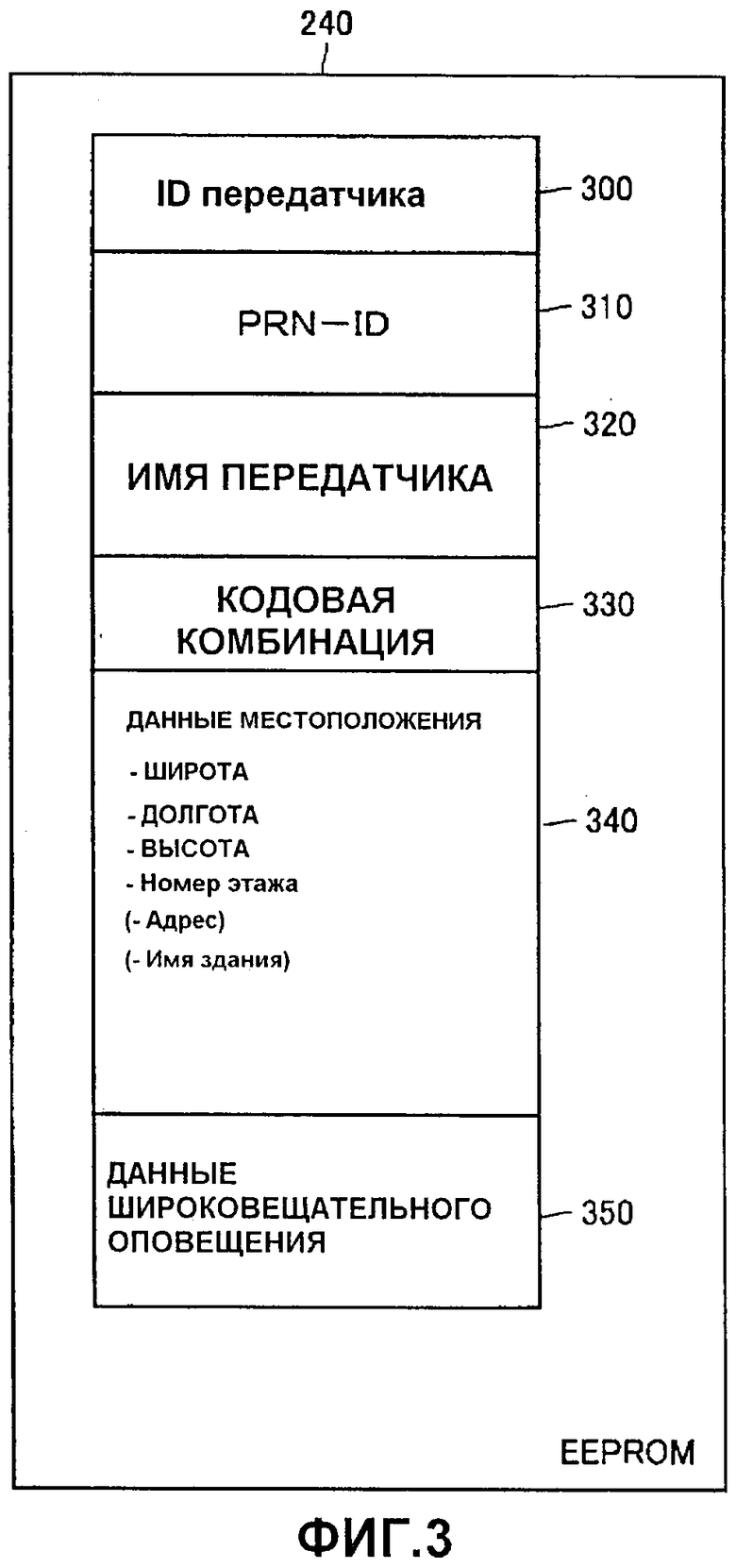
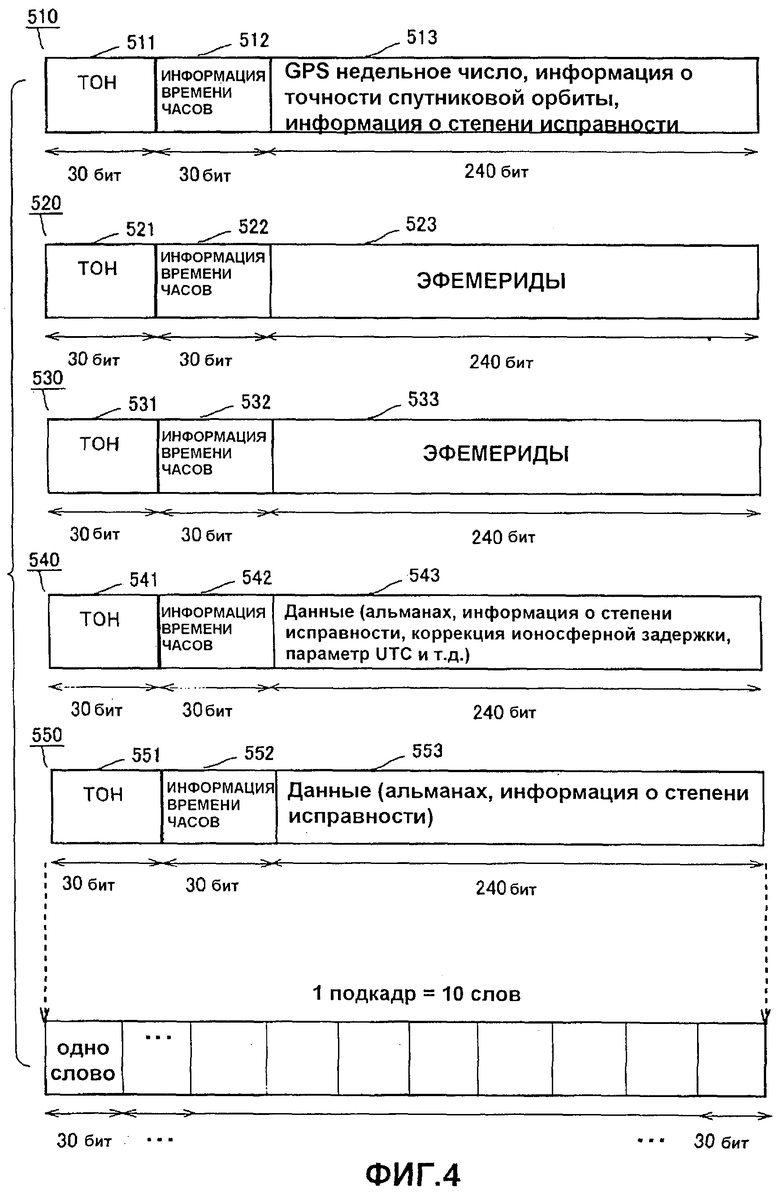
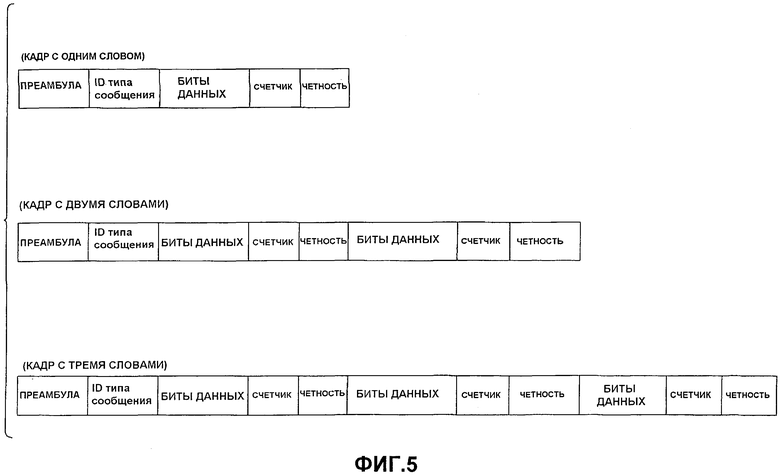
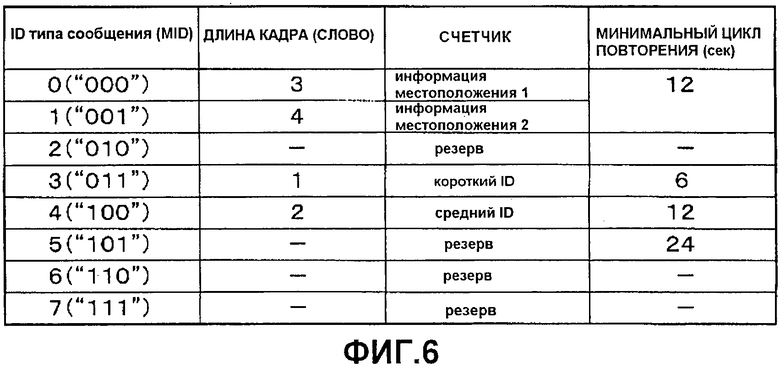
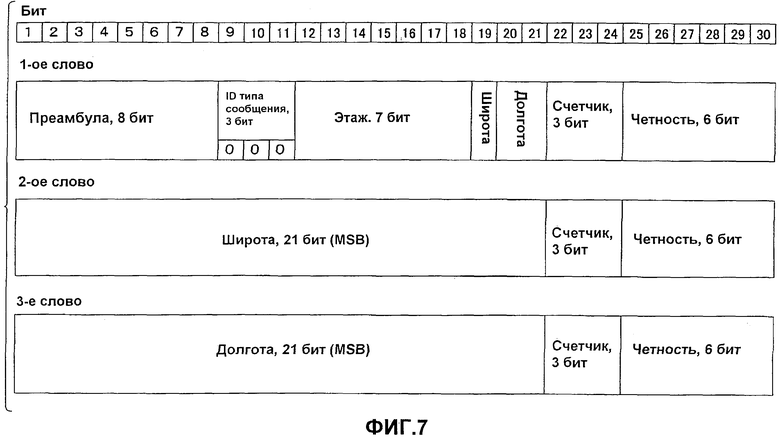
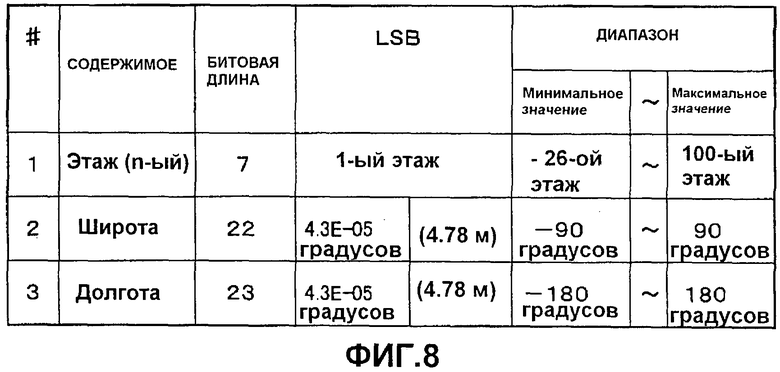
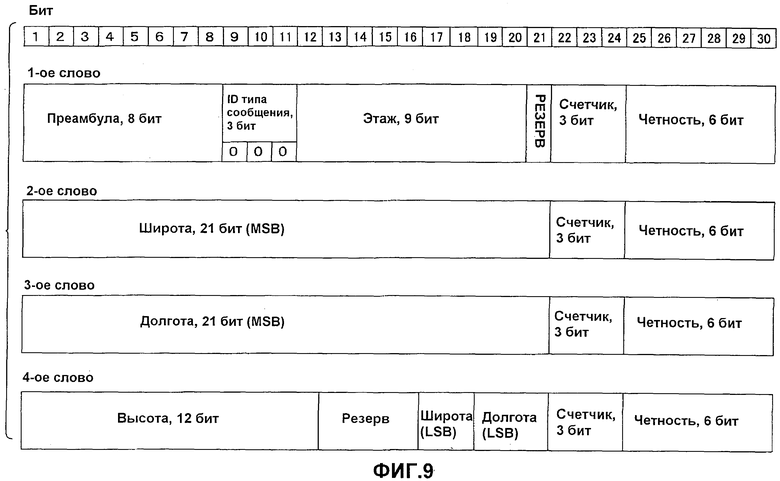
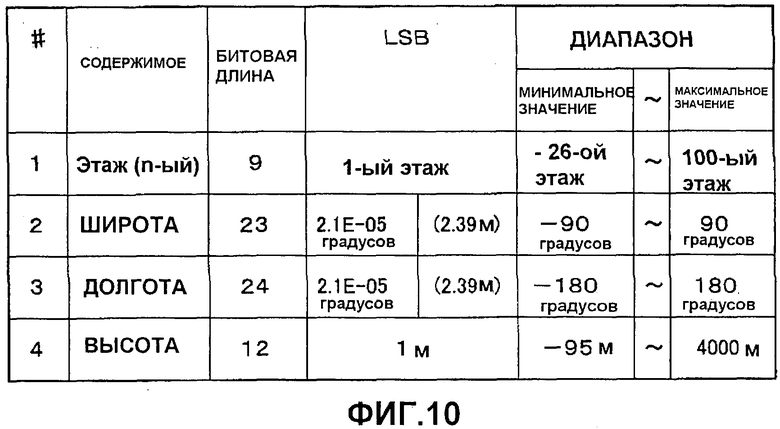
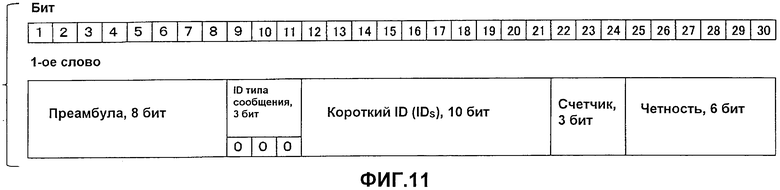
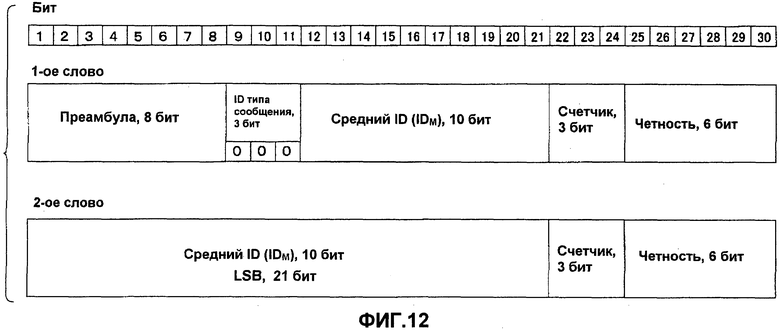
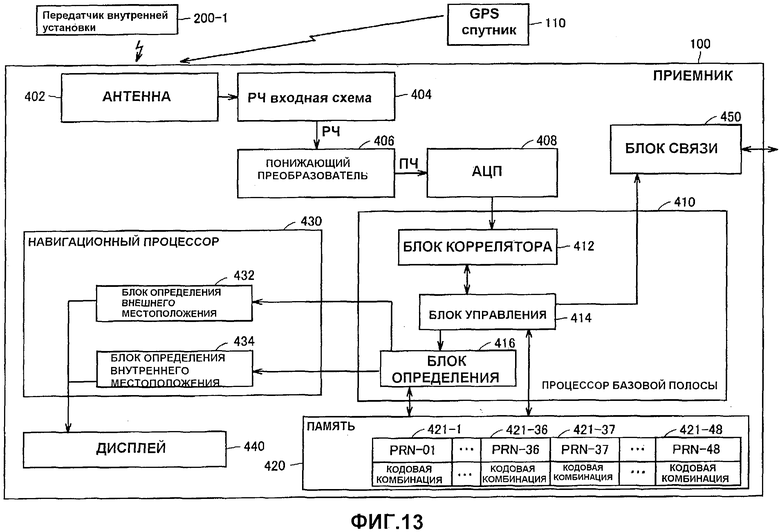
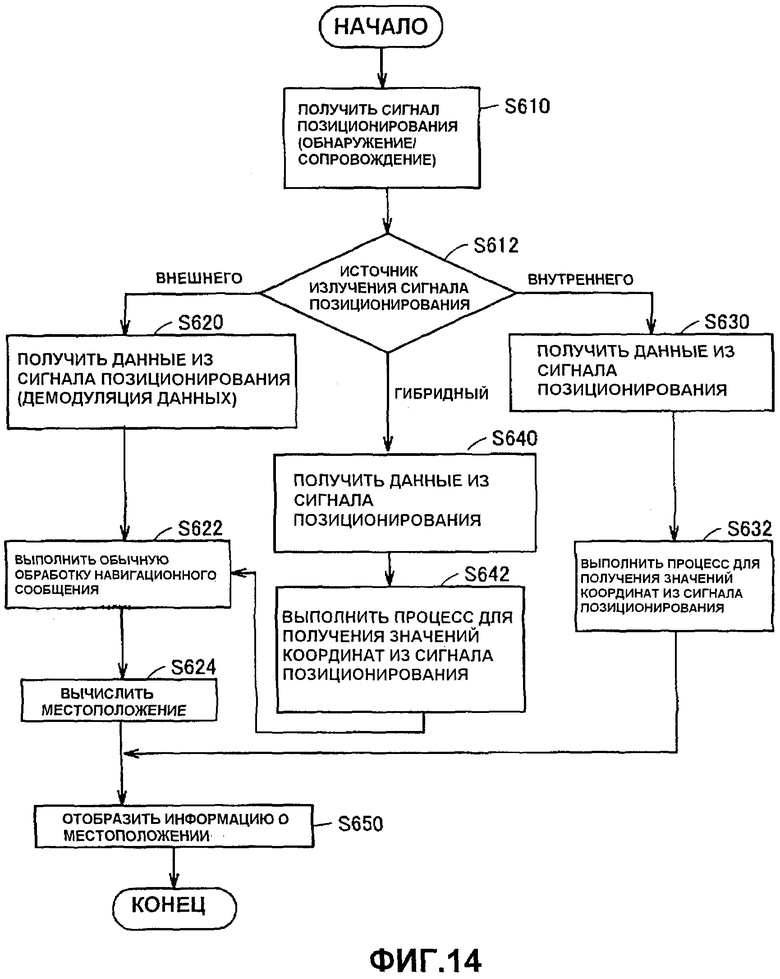
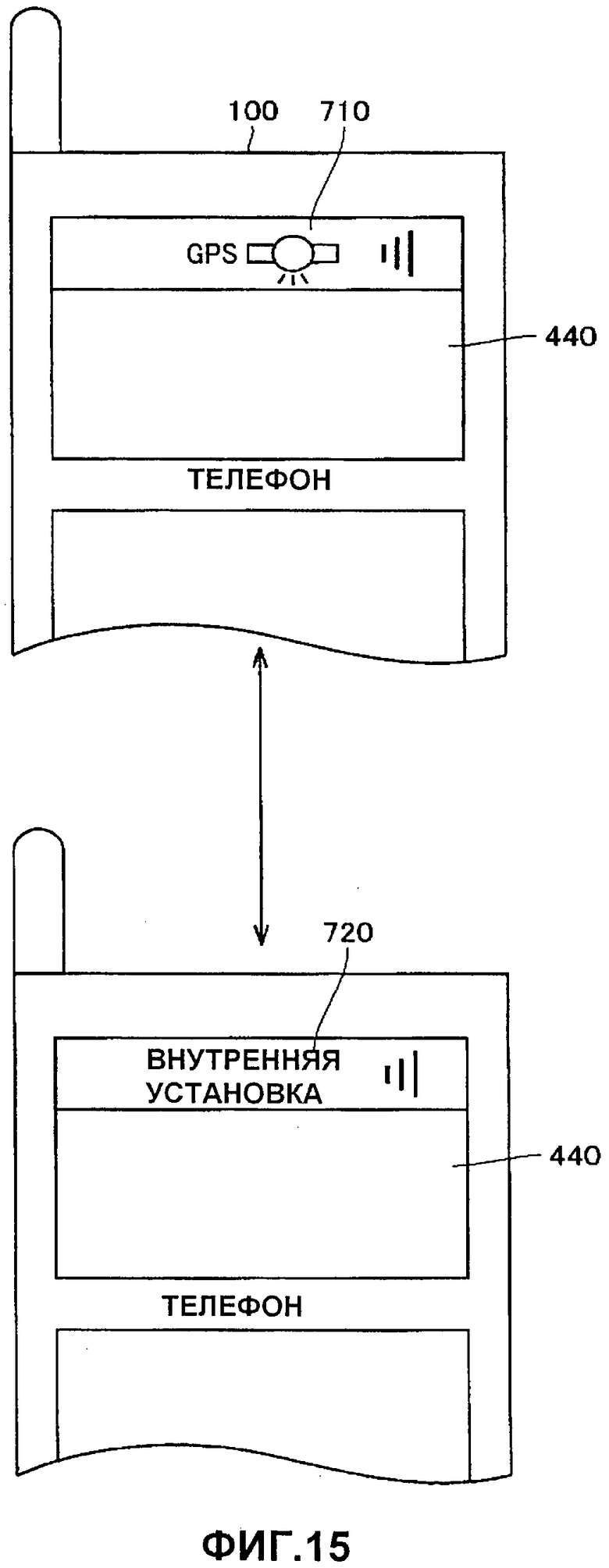
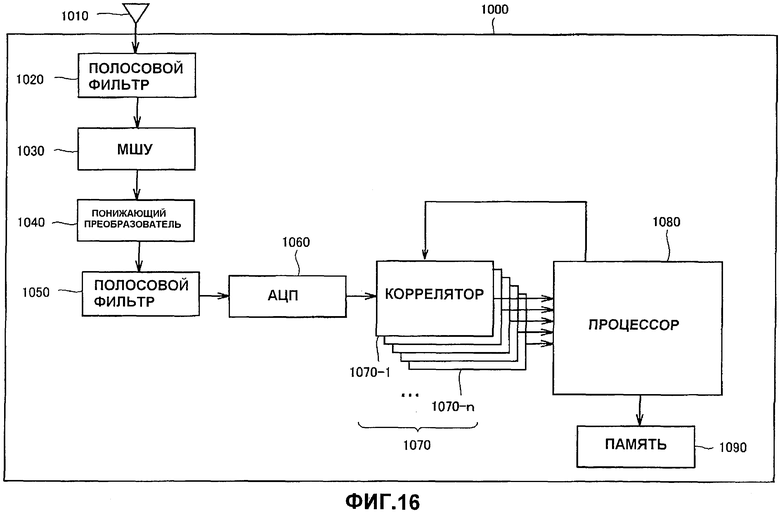
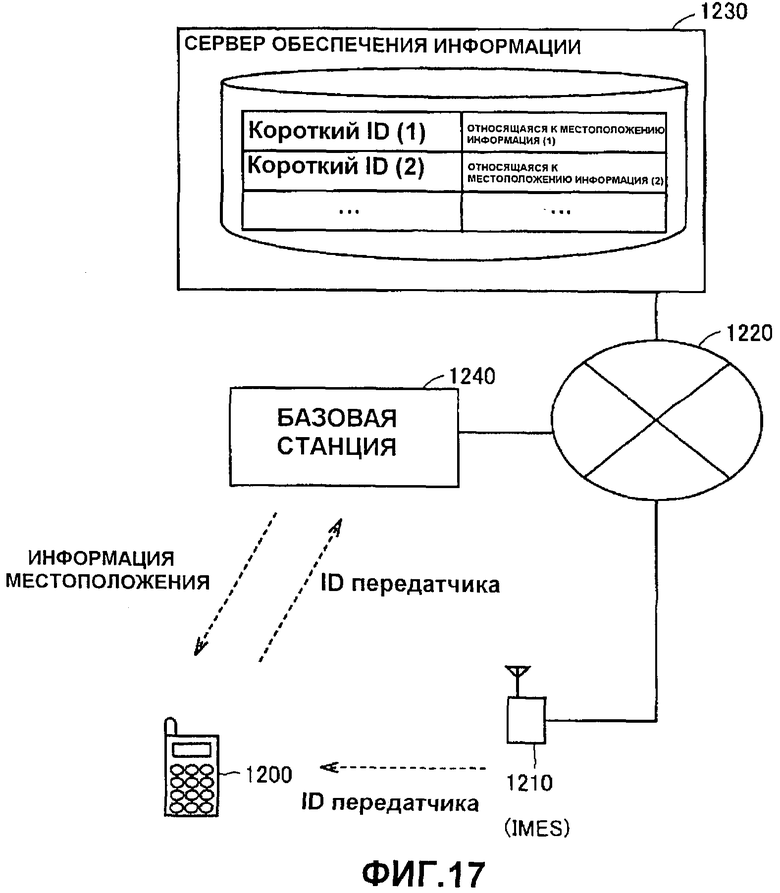
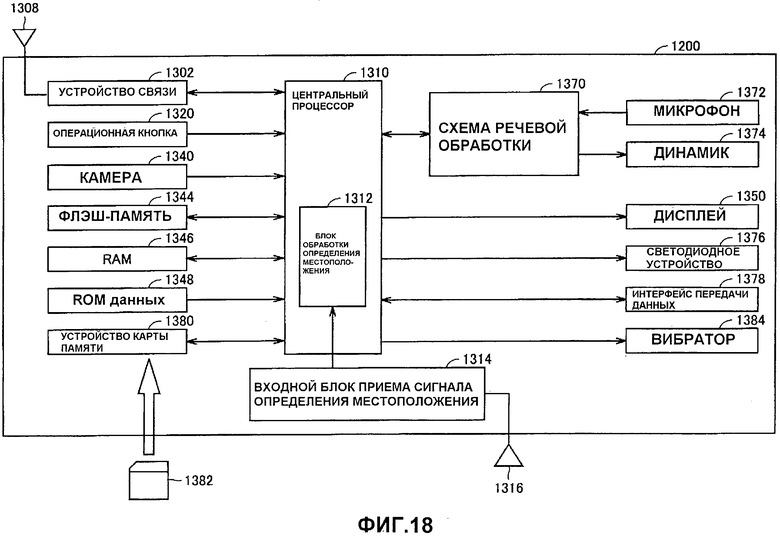
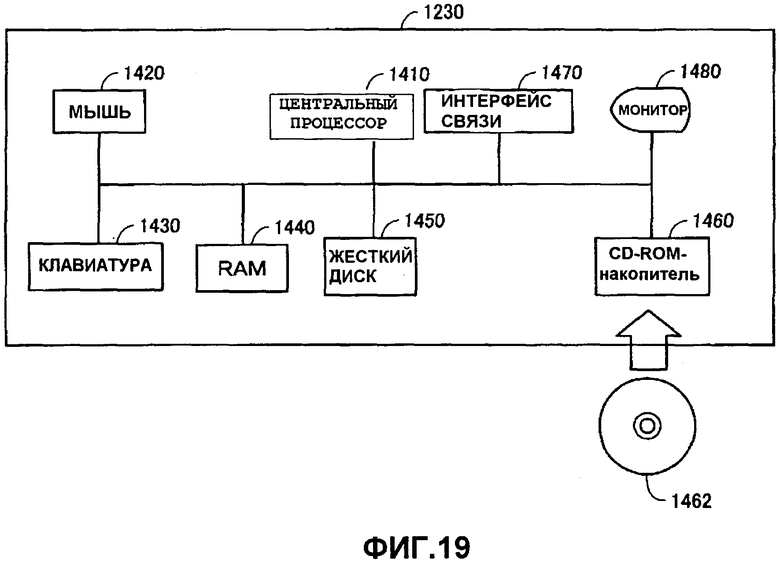
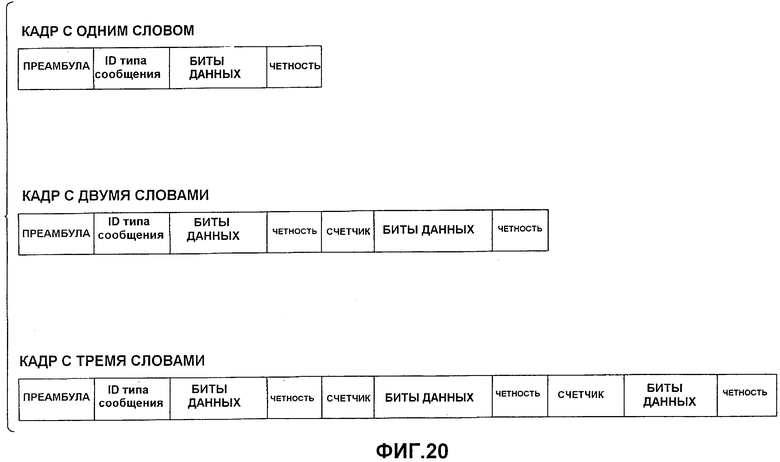
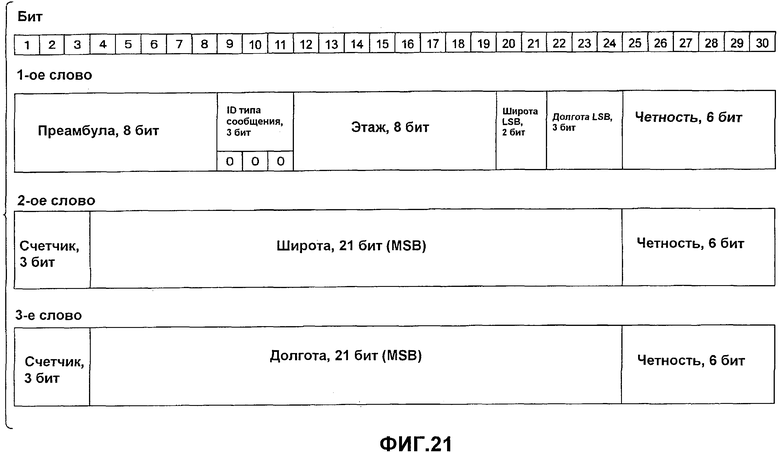

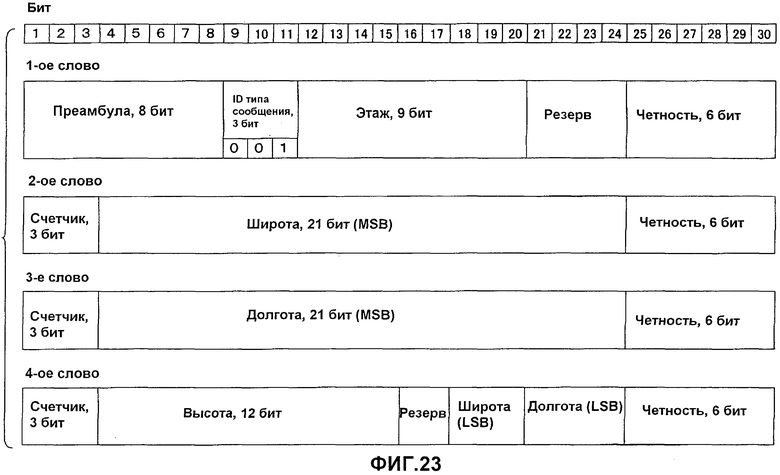
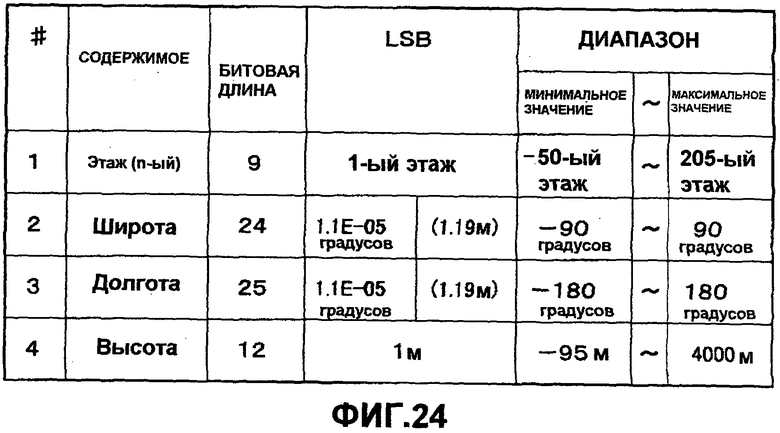
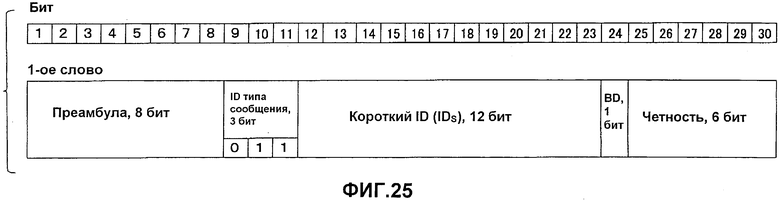
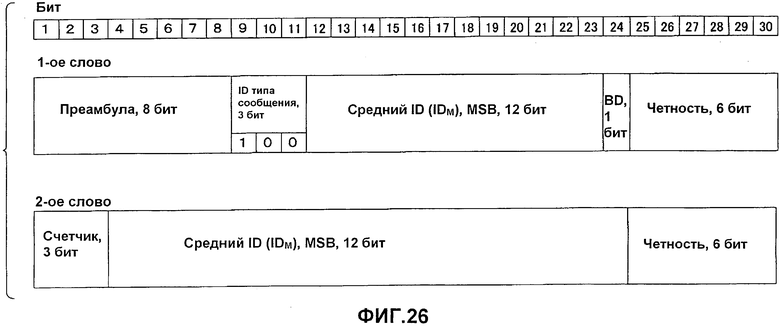
Изобретение относится к области радиотехники, а именно к определению местоположения, и может быть использовано в глобальной системе определения местоположения. Технический результат заключается в обеспечении информации о местоположении без ухудшения точности даже в местоположении, где невозможно принимать радиоволны от спутника, который излучает сигналы для определения местоположения, и в снижении времени, требуемого для получения информации о местоположении. Для этого передатчик (200-1) внутренней установки приспособлен для обеспечения информации о местоположении путем использования второго сигнала определения местоположения, совместимого с первым сигналом определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников. Передатчик (200-1) внутренней установки содержит память EEPROM (243), которая хранит данные местоположения для идентификации его местоположения установки, FPGA (245), действующую для генерации второго сигнала, включающего в себя данные местоположения, в виде сигнала расширенного спектра, и передающий блок (251-258), действующий для передачи сигнала расширенного спектра. Второй сигнал определения местоположения генерируется для повторения того же самого содержания в цикле, более коротком, чем у первого сигнала определения местоположения. 3 н. и 7 з.п. ф-лы, 26 ил.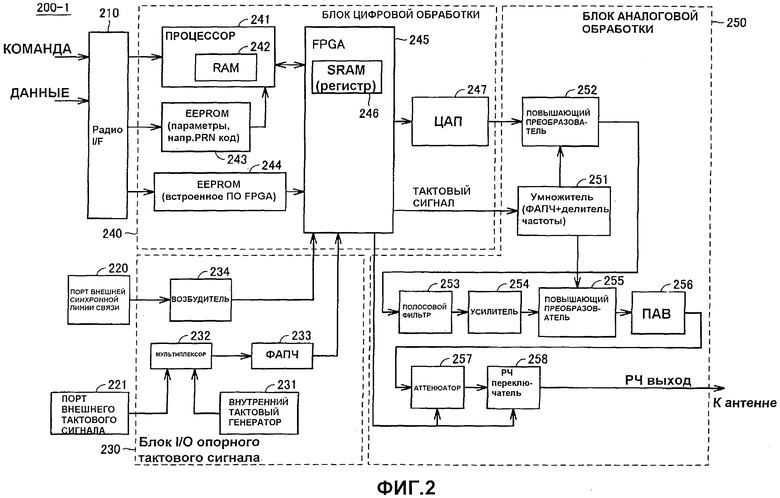
1. Система обеспечения информации о местоположении, способная предоставлять информацию о местоположении с использованием первого сигнала определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников, содержащая передатчик внутренней установки и устройство обеспечения информации о местоположении, при этом
передатчик внутренней установки содержит запоминающее устройство, хранящее данные местоположения для идентификации местоположения установки передатчика внутренней установки, блок генерации для генерации, в виде сигнала расширенного спектра, второго сигнала определения местоположения, содержащего данные местоположения, и передающий блок для передачи сгенерированного сигнала расширенного спектра,
устройство обеспечения информации о местоположении содержит приемный блок для приема сигнала расширенного спектра, блок идентификации для того, чтобы на основе множества кодовых комбинаций, связанных с первым и вторым сигналами определения местоположения, идентифицировать одну из кодовых комбинаций, которая соответствует сигналу расширенного спектра, принимаемому приемным блоком, блок определения для того, чтобы на основе сигнала, полученного демодуляцией принятого сигнала расширенного спектра с использованием кодовой комбинации, идентифицированной блоком идентификации, определять, какой из первого и второго сигналов определения местоположения принят, блок получения информации о местоположении для получения информации о местоположении устройства обеспечения информации о местоположении, при переключении между режимами обработки в зависимости от результата определения, и блок вывода для вывода информации о местоположении, полученной блоком получения информации о местоположении,
причем второй сигнал определения местоположения конфигурирован для повторения сообщения того же самого содержания в цикле, более коротком, чем у первого сигнала определения местоположения, и второй сигнал определения местоположения содержит множество кадров, каждый из которых включает в себя одно или более слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем
число слов, включенных в каждый из кадров, установлено переменным,
первое одно из слов в каждом из кадров включает в себя преамбулу для установления синхронизации кадров при приеме,
первое одно из слов в каждом из кадров содержит идентификационную информацию типа сообщения, указывающую количество слов, составляющих кадр, и дополнительно указывающую, включает ли кадр информацию о местоположении или другую информацию; и
если кадры включают более одного слова, то остальные одно или более слов, иные чем, по меньшей мере, первое слово, в каждом из кадров включают в себя данные отсчета, которые обновляются каждый раз, когда генерируются данные слова.
2. Система обеспечения информации о местоположении по п.1, в которой первый сигнал определения местоположения содержит множество первых кадров, каждый из которых включает в себя множество первых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из первых кадров включает в себя первую преамбулу для установления синхронизации кадров при приеме; и
второй сигнал определения местоположения содержит множество вторых кадров, каждый из которых включает в себя множество вторых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из вторых кадров включает в себя вторую преамбулу для установления синхронизации кадров при приеме, и
причем вторая преамбула имеет структуру, отличающуюся от структуры первой преамбулы.
3. Система обеспечения информации о местоположении по п.1, в которой блок получения информации о местоположении действует, когда принят второй сигнал определения местоположения, переданный передатчиком внутренней установки, чтобы получать данные местоположения из сигнала, полученного путем демодуляции, и, когда принято множество первых сигналов определения местоположения без приема второго сигнала определения местоположения, чтобы вычислять информацию о местоположении на основе множества принятых сигналов расширенного спектра.
4. Система обеспечения информации о местоположении по п.1, в которой устройство обеспечения информации о местоположении выполнено с возможностью осуществления связи с устройством связи для обеспечения относящейся к местоположению информации, ассоциированной с идентификационными данными, через линию связи, и
блок получения информации о местоположении действует, когда приемный блок принимает второй сигнал определения местоположения, чтобы осуществлять связь с устройством связи на основе идентификационных данных, для получения относящейся к местоположению информации, ассоциированной с идентификационными данными.
5. Передатчик внутренней установки, способный обеспечивать информацию о местоположении с использованием первого сигнала определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников, и второго сигнала определения местоположения, совместимого с первым сигналом определения местоположения, содержащий
первое запоминающее устройство, хранящее данные местоположения для идентификации местоположения установки передатчика внутренней установки,
блок генерации для генерации, в виде сигнала расширенного спектра, второго сигнала определения местоположения, содержащего данные местоположения, и
передающий блок для передачи сгенерированного сигнала расширенного спектра,
причем блок генерации выполнен с возможностью генерации второго сигнала определения местоположения таким образом, чтобы повторять сообщение того же содержания в цикле более коротком, чем у первого сигнала определения местоположения, и второй сигнал определения местоположения содержит множество кадров, каждый из которых включает в себя одно или более слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем число слов, включенных в каждый из кадров, установлено переменным,
первое одно из слов в каждом из кадров включает в себя преамбулу для установления синхронизации кадров при приеме,
первое одно из слов в каждом из кадров содержит идентификационную информацию типа сообщения, указывающую количество слов, составляющих кадр, и дополнительно указывающую, включает ли кадр информацию о местоположении или другую информацию; и
если кадры включают более одного слова, то остальные одно или более слов, иные, чем, по меньшей мере, первое слово, в каждом из кадров включают в себя данные отсчета, которые обновляются каждый раз, когда генерируются данные слова.
6. Передатчик внутренней установки по п.5, в котором
первый сигнал определения местоположения содержит множество первых кадров, каждый из которых включает в себя множество первых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из первых кадров включает в себя первую преамбулу для установления синхронизации кадров при приеме, и
второй сигнал определения местоположения содержит множество вторых кадров, каждый из которых включает в себя множество вторых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из вторых кадров включает в себя вторую преамбулу для установления синхронизации кадров при приеме, и
причем вторая преамбула имеет структуру, отличающуюся от структуры первой преамбулы.
7. Передатчик внутренней установки по п.5, в котором блок генерации включает в себя идентификационные данные, ассоциированные с относящейся к местоположению информацией.
8. Способ обеспечения информации о местоположении с использованием первого сигнала определения местоположения, который является сигналом расширенного спектра от каждого из множества спутников, содержащий:
этап загрузки данных местоположения для идентификации местоположения установки передатчика внутренней установки;
этап генерации второго сигнала определения местоположения, включающего в себя данные местоположения, в виде сигнала расширенного спектра;
этап передачи сгенерированного сигнала расширенного спектра;
этап приема переданного сигнала расширенного спектра;
этап идентификации, на основе множества кодовых комбинаций, связанных с первым и вторым сигналами определения местоположения, одной из кодовых комбинаций, которая соответствует принятому сигналу расширенного спектра;
этап определения, на основе сигнала, полученного демодуляцией принятого сигнала расширенного спектра с использованием идентифицированной кодовой комбинации, какой из первого и второго сигналов определения местоположения принят;
этап получения информации о местоположении при переключении между режимами обработки, в зависимости от результата определения; и
этап вывода полученной информации о местоположении,
причем второй сигнал определения местоположения генерируется таким образом, чтобы повторять сообщение того же содержания в цикле более коротком, чем у первого сигнала определения местоположения, и второй сигнал определения местоположения содержит множество кадров, каждый из которых включает в себя одно или более слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем
число слов, включенных в каждый из кадров, установлено переменным,
первое одно из слов в каждом из кадров включает в себя преамбулу для установления синхронизации кадров при приеме,
первое одно из слов в каждом из кадров содержит идентификационную информацию типа сообщения, указывающую количество слов, составляющих кадр, и дополнительно указывающую, включает ли кадр информацию о местоположении или другую информацию; и
если кадры включают более одного слова, то остальные одно или более слов, иные, чем, по меньшей мере, первое слово, в каждом из кадров включают в себя данные отсчета, которые обновляются каждый раз, когда генерируются данные слова.
9. Способ по п.8, в котором
первый сигнал определения местоположения содержит множество первых кадров, каждый из которых включает в себя множество первых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из первых кадров включает в себя первую преамбулу для установления синхронизации кадров при приеме; и
второй сигнал определения местоположения содержит множество вторых кадров, каждый из которых включает в себя множество вторых слов, каждое из которых представляет собой блок данных передачи, подвергаемый обнаружению ошибок, причем каждый из вторых кадров включает в себя вторую преамбулу для установления синхронизации кадров при приеме, и
причем вторая преамбула имеет структуру, отличающуюся от структуры первой преамбулы.
10. Способ по п.8, в котором этап получения включает в себя подэтап, на котором, когда второй сигнал определения местоположения передается от передатчика внутренней установки, получают данные местоположения из сигнала, полученного путем демодуляции, и подэтап, на котором, когда множество первых сигналов определения местоположения принимаются без приема второго сигнала определения местоположения, вычисляют информацию местоположения на основе множества принятых сигналов расширенного спектра.
| Толстый лист из дисперсионно-твердеющей стали для горячей штамповки и способ его получения | 2017 |
|
RU2649110C1 |
| JP 2004132750 A, 30.04.2004 | |||
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| JP 2005077172 A, 24.03.2005. | |||

