Область техники
[0001] Настоящая технология относится к системе временной синхронизации и устройству передачи, включенному в систему временной синхронизации.
уровень техники
[0002] В системе, требующей временной синхронизации среди множества устройств, в основном использовался способ использования глобальной спутниковой навигационной системы (GNSS), такой как глобальная система позиционирования (GPS). Обычно, в базовой станции мобильной связи (которая также упоминается ниже просто как "базовая станция"), адаптированной для множественного доступа с кодовым разделением (CDMA), системная синхронизация, требуемая для управления передачей и приемом данных, достигалась с начальной стадии ее практического использования путем использования радиосигнала от GNSS (который также упоминается ниже как "сигнал GNSS").
[0003] В обычной конфигурации, временная синхронизация среди множества базовых станций достигается путем обеспечения приемника GNSS в каждой базовой станции, и каждая базовая станция координирует время на основе временного сигнала, выведенного из приемника (в примере GPS, сигнала импульсов в секунду (PPS) или тому подобного), и временного сообщения (см. также NPL 1 и тому подобное).
[0004] Чтобы учитывать повышенный трафик, технология связи, упоминаемая как Развитое LTE (LTE-Advanced), была введена в практическое пользование, и более того, система мобильной связи следующего поколения, упоминаемая как 5G, также технически исследовалась и развивалась (см. также NPL 2 и тому подобное). LTE-Advanced включает в себя множественный вход и множественный выход (MIMO) и скоординированные многоточечные передачу/прием (CoMP) в качестве технологий для увеличения пропускной способности, и более точная временная синхронизация требуется для реализации таких технологий.
[0005] В качестве подхода для увеличения функциональных возможностей связи путем повышения эффективности в использовании частот, сота также была уменьшена в размере, и микро базовая станция, называемая фемтосотой, также была введена в практическое пользование. Системная синхронизация должна достигаться также в такой микро базовой станции как в обычной базовой станции.
Список цитированных документов
Непатентные документы
[0006] NPL 1: Kaoru Arai и Makoto Murakami, "Overview of Network Synchronization Technology, Standardization in ITU-T", NTT Technical Journal, December 2015
NPL 2: Taoka et al., "MIMO and CoMP in LTE-Advanced", NTT DOCOMO Technical Journal Vol. 18, No. 2, July 2010
NPL 3: "IMES User Interface Specifications (IS-IMES)", Japan Aerospace Exploration Agency, October 2016
сущностЬ изобретения
Техническая ЗАДАЧА
[0007] Микро базовая станция, как описано выше, рассматривается как обеспеченная в помещении, например, в доме пользователя. Такая микро базовая станция, обеспеченная в помещении, часто неспособна принимать сигнал GNSS, или интенсивность принятого сигнала GNSS часто является недостаточной. В таком случае, временная синхронизация, как принято в традиционной базовой станции, не может быть достигнута.
[0008] С учетом таких проблем, задачей настоящей технологии является обеспечить систему, способную реализовывать временную синхронизацию среди множества устройств, обеспеченных в положениях, где они неспособны принимать сигнал GNSS.
Решение задачи
[0009] Система временной синхронизации в соответствии с одним аспектом настоящего изобретения включает в себя модуль получения опорного времени, сконфигурированный, чтобы получать, на основе радиосигнала от глобальной спутниковой навигационной системы, первый сигнал временной диаграммы (тайминга) и информацию времени, соответствующую таймингу, указанному первым сигналом тайминга, модулятор, соединенный с линией, разветвленной на множество ветвей, сконфигурированный, чтобы генерировать модулированный сигнал, содержащий соответствующую информацию времени в синхронизации с первым сигналом тайминга, и отправлять модулированный сигнал по линии, по меньшей мере один демодулятор, соединенный с любой ветвью линии, сконфигурированный, чтобы демодулировать модулированный сигнал, распространяющийся по линии, и по меньшей мере один передатчик, сконфигурированный, чтобы передавать первый радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы на основе второго сигнала тайминга и информации времени, полученной посредством демодуляции любым демодулятором.
[0010] Предпочтительно, первый сигнал тайминга выводится периодически, модулятор сконфигурирован, чтобы отправлять модулированный сигнал по линии с таймингом, определенным из момента времени вывода первого сигнала тайминга, в качестве опоры, и модулированный сигнал содержит слово синхронизации в дополнение к информации времени.
[0011] Предпочтительно, демодулятор сконфигурирован, чтобы выводить, когда он обнаруживает слово синхронизации, содержащееся в модулированном сигнале, распространяющемся по линии, информацию, следующую за обнаруженным словом синхронизации, в качестве демодулированных данных, и выводить второй сигнал тайминга с таймингом, определенным из момента времени, предшествующего моменту времени обнаружения слова синхронизации на предопределенное время коррекции, в качестве опоры.
[0012] Предпочтительно, система временной синхронизации дополнительно включает в себя устройство калибровки, сконфигурированное, чтобы получать третий сигнал тайминга по существу идентичный первому сигналу тайминга, полученному модулем получения опорного времени, и определять время коррекции путем измерения временного интервала между третьим сигналом тайминга и вторым сигналом тайминга, выведенным из демодулятора.
[0013] Предпочтительно, передатчик сконфигурирован, чтобы передавать первый радиосигнал с периодом дольше, чем период второго сигнала тайминга, выведенного из демодулятора.
[0014] Предпочтительно, первый радиосигнал поддерживает по меньшей мере одно из первого формата, содержащего информацию о неделе, прошедшей с предписанного опорного дня, и полных секундах с начала недели, и второго формата, содержащего информацию о христианском годе, месяце, дне, часе, минуте и секунде.
[0015] Предпочтительно, первый радиосигнал сконфигурирован как кадр, состоящий из множества слов, заголовок множества слов, которые составляют кадр, ассоциирован с моментом времени начала периода передачи, и первое слово в кадре фиксировано на предопределенном значении.
[0016] Предпочтительно, система временной синхронизации дополнительно включает в себя приемник, сконфигурированный, чтобы демодулировать первый радиосигнал от передатчика для получения четвертого сигнала тайминга и информации времени, соответствующей таймингу, указанному четвертым сигналом тайминга, и приемник включает в себя схему, которая выполняет обработку операции свертки множество раз на первом слове.
[0017] Предпочтительно, передатчик сконфигурирован, чтобы передавать второй радиосигнал, замещающий радиосигнал от глобальной спутниковой навигационной системы, в то время как первый радиосигнал не передается.
[0018] Предпочтительно, линия включает в себя по меньшей мере любое из линии сигнала общей антенной системы, линии сигнала кабельного телевидения и линии сигнала для связи.
[0019] Предпочтительно, первый радиосигнал включает в себя сообщение предписанной длины, вычисленное на основе информации времени, полученной модулем получения опорного времени.
[0020] Дополнительно предпочтительно, сообщение предписанной длины вычисляется согласно криптографической хеш-функции с секретным ключом и информации времени, определяемой в качестве ввода.
[0021] Система временной синхронизации в соответствии с одним аспектом настоящего изобретения включает в себя модуль получения опорного времени, сконфигурированный, чтобы получать, на основе радиосигнала от глобальной спутниковой навигационной системы, первый сигнал тайминга и информацию времени, соответствующую таймингу, указанному первым сигналом тайминга, и модулятор, соединенный с линией, разветвленной на множество ветвей, сконфигурированный, чтобы генерировать модулированный сигнал, содержащий соответствующую информацию времени в синхронизации с первым сигналом тайминга, и отправлять модулированный сигнал по линии. По меньшей мере один терминал для соединения демодулятора, сконфигурированного, чтобы демодулировать модулированный сигнал, распространяющийся по линии, обеспечен на ветви линии.
[0022] Устройство передачи в соответствии с одним аспектом настоящего изобретения включает в себя демодулятор, соединенный с любым положением в линии, разветвленной на множество ветвей, сконфигурированный, чтобы демодулировать модулированный сигнал, распространяющийся по линии. Модулированный сигнал генерируется на основе первого сигнала тайминга, определенного в качестве опоры, и информации времени, соответствующей таймингу, указанному первым сигналом тайминга, и отправленного по линии в синхронизации с первым сигналом тайминга. Устройство передачи включает в себя передатчик, сконфигурированный, чтобы передавать радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы на основе второго сигнала тайминга и информации времени, полученной посредством демодуляции демодулятором.
[0023] Устройство передачи в соответствии с одним аспектом настоящего изобретения включает в себя приемник, сконфигурированный, чтобы принимать первый сигнал тайминга, генерируемый на основе первого радиосигнала от глобальной спутниковой навигационной системы, и передатчик, сконфигурированный, чтобы передавать второй радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы на основе сигнала и информации времени, принятой приемником. Второй радиосигнал включает в себя положение, время, сигнал тайминга и информацию аутентификации.
ПОЛЕЗНЫЕ РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
[0024] В соответствии с одним вариантом осуществления настоящего изобретения, может быть обеспечена система, способная осуществлять временную синхронизацию среди множества устройств, обеспеченных в положениях, где они неспособны принимать сигнал GNSS.
Краткое описание чертежей
[0025] Фиг. 1 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 2 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 3 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 4 представляет собой схематичную диаграмму, показывающую примерную конфигурацию базовой станции, включенной в систему мобильной связи в соответствии с настоящим вариантом осуществления.
Фиг. 5 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 6 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 7 представляет собой блок-схему, показывающую примерную конфигурацию схемы модулятора S2, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 8 представляет собой диаграмму, показывающую примерную структуру RF сигнала передачи, генерируемого модулятором S2, включенным в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 9 представляет собой блок-схему, показывающую примерную конфигурацию схемы демодулятора S2, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 10 представляет собой блок-схему, показывающую примерную конфигурацию схемы передатчика S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 11 представляет собой диаграмму, показывающую один пример типа сообщения (MT) сигнала, передаваемого от передатчика S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 12 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 13 представляет собой диаграмму, показывающую другой пример типа сообщения (MT) сигнала, передаваемого от передатчика S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 14 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 15 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 16 представляет собой диаграмму, показывающую еще один другой пример типа сообщения (MT) сигнала, передаваемого от передатчика S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 17 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 18 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 19 представляет собой диаграмму, показывающую еще один другой пример типа сообщения (MT) сигнала, передаваемого от передатчика S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 20 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 21 представляет собой диаграмму, показывающую один пример структуры кадра формата сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 22 представляет собой диаграмму для иллюстрации одного примера кода тайминга, передаваемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 23 представляет собой диаграмму для иллюстрации одного примера сообщения, передаваемого от передатчика S3 в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 24 представляет собой диаграмму для иллюстрации другого примера сообщения, передаваемого от передатчика S3 в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 25 представляет собой блок-схему последовательности операций, показывающую процедуру обработки при генерации и передаче сигнала IMES-TAS от передатчика S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 26 представляет собой блок-схему, показывающую примерную конфигурацию схемы приемника S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 27 представляет собой диаграмму для иллюстрации обработки для приема сообщения, включающего в себя телеметрическое слово в приемнике S3, включенном в систему временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 28 представляет собой диаграмму для иллюстрации конфигурации сообщения, принятого в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 29 представляет собой диаграмму для иллюстрации одного примера информации, содержащейся в сигнале, передаваемом в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 30 представляет собой диаграмму для иллюстрации одного примера способа генерирования кода аутентификации в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 31 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 32 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 33 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 34 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 35 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 36 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 37 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 38 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 39 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 40 представляет собой диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 41 представляет собой диаграмму для иллюстрации задержки передачи, вызываемой в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 42 представляет собой диаграмму для иллюстрации применения устройства калибровки тайминга в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 43 представляет собой блок-схему, показывающую примерную конфигурацию схемы устройства калибровки тайминга, обеспеченного в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 44 представляет собой диаграмму для иллюстрации функции для автоматической коррекции времени задержки в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
Фиг. 45 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с первой модификацией настоящего варианта осуществления.
Фиг. 46 представляет собой схематичную диаграмму, показывающую примерную конфигурацию базовой станции, включенной в систему мобильной связи, показанной на фиг. 45.
Фиг. 47 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии со второй модификацией настоящего варианта осуществления.
Фиг. 48 представляет собой схематичную диаграмму, показывающую примерную конфигурацию базовой станции, включенной в систему мобильной связи, показанной на фиг. 47.
Фиг. 49 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с третьей модификацией настоящего варианта осуществления.
Фиг. 50 представляет собой схематичную диаграмму, показывающую один пример системы мобильной связи, включающей в себя систему временной синхронизации в соответствии с четвертой модификацией настоящего варианта осуществления.
Описание вариантов осуществления
[0026] Вариант осуществления настоящего изобретения будет описан подробно со ссылкой на чертежи. Одни и те же или соответствующие элементы на чертежах имеют одни и те же выделенные ссылочные позиции, и их описание не будет повторяться.
[0027] <A. Обзор системы>
Сначала будет описан обзор системы временной синхронизации в соответствии с настоящим вариантом осуществления. Хотя конфигурация в примере применения к временной синхронизации в системе мобильной связи, включающей в себя базовую станцию, такую как фемтосота, описана ниже как обычное применение системы временной синхронизации в соответствии с настоящим вариантом осуществления, система временной синхронизации применима к любому устройству или системе без ограничения до описанной конфигурации.
[0028] (a1: Первый пример реализации)
Фиг. 1-3 представляют собой, каждая, схематичную диаграмму, показывающую один пример системы 1 мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления. Система 1 мобильной связи, показанная на фиг. 1-3, сконфигурирована в качестве примера путем обеспечения заново множества базовых станций 300-1, 300-2, … (которые могут также совместно упоминаться далее как "базовая станция 300") в уже обеспеченном здании 10. Обычно, базовая станция 300 обеспечена для каждого помещения в здании 10.
[0029] Предполагается, что базовая станция 300 включает в себя приемник, который может осуществлять системную синхронизацию путем приема сигнала GNSS. Система временной синхронизации осуществляет системную синхронизацию в системе мобильной связи, включающей в себя базовую станцию 300, путем предоставления смоделированного сигнала, который дополняет сигнал GNSS, на базовую станцию 300. В настоящем варианте осуществления, в качестве примера, используется альтернативный сигнал, подходящий для временной синхронизации на основе смоделированного сигнала для дополнения сигнала GNSS, упоминаемый как известный "сигнал внутренней системы передачи сообщений (IMES)" (относительно сигнала IMES, см. NPL 3 и т.п.).
[0030] В описании ниже, сигнал для системной синхронизации, предоставляемый на базовую станцию 300, также обозначается как "синхросигнал тайминга внутренней системы передачи сообщений (IMES-TS)" или "сигнал IMES-TS."
[0031] Сигнал IMES-TS обычно включает в себя положение (Position), время (тактовый сигнал) (Clock) и сигнал тайминга (Timing). Подробности такой информации будут описаны ниже. Сигнал IMES-TS может дополнительно включать в себя код аутентификации (Authentication Code). Код аутентификации обычно используется для обеспечения целостности или аутентичности принятой информации о положении или времени. Подробности такого кода аутентификации также будут описаны ниже.
[0032] Сигнал IMES-TS, дополнительно включающий в себя код аутентификации, также обозначается как "синхросигнал аутентификации тайминга внутренней системы передачи сообщений (IMES-TAS)" или "сигнал IMES-TAS." Такой сигнал IMES-TAS может предоставляться, например, на мобильный терминал, такой как смартфон или портативный телефон.
[0033] Хотя сигнал IMES-TAS будет описан для удобства описания, это описание очевидно применимо также аналогично к сигналу IMES-TS, полученному путем исключения кода аутентификации из сигнала IMES-TAS.
[0034] Хотя система временной синхронизации, имеющая совместимость с предшествующими версиями и совместимость с последующими версиями существующей IMES, представлена в качестве примера в настоящем варианте осуществления, принятие такого сигнала на основе IMES сделано для удобства, и может быть принят любой формат сигнала. Технический объем настоящего изобретения не ограничен технологией, относящейся к известной IMES, но должен определяться на основе терминов формулы изобретения.
[0035] В системе 1 мобильной связи, модули 200-1, 200-2,… передачи для подачи сигналов IMES-TAS (которые могут также совместно упоминаться далее как "модуль 200 передачи") предусмотрены в положениях, в которых соответственные базовые станции 300-1, 300-2, … способны принимать сигналы IMES-TAS. Опорный модуль 100, на который подается сигнал (который также упоминается далее как "радиочастотный (RF) сигнал передачи") для генерирования сигнала IMES-TAS, обеспечен для модулей 200 передачи. В системе 1 мобильной связи, показанной на фиг. 1, предполагается конфигурация, в которой один опорный модуль 100 предусмотрен для каждого уже обеспеченного здания 10. Модули 200-1, 200-2, … передачи генерируют сигналы IMES-TAS на основе RF сигнала передачи, предоставленного из опорного модуля 100, и базовые станции 300-1, 300-2, … могут определять текущее время путем приема сигналов IMES-TAS.
[0036] Предполагается, что сигнал IMES-TAS от модуля 200 передачи на базовую станцию 300 передается беспроводным способом. Хотя RF сигнал передачи может беспроводным способом передаваться от опорного модуля 100 на модуль 200 передачи, обычно предполагается проводная передача.
[0037] В качестве примера, когда предполагается, что множество базовых станций 300 заново предоставлены в уже обеспеченном здании 10, новая линия сигнала может быть проложена в здании 10 или может использоваться уже предусмотренный кабель в уже обеспеченном здании 10. Телефонная линия, линия связи, линия питания и антенная линия могут использоваться в качестве такого уже предусмотренного кабеля. К тому же, проводник (металлический провод) или оптическое волокно может быть принято в качестве среды для передачи сигнала.
[0038] В настоящем варианте осуществления, пример, в котором используется общая антенная система, обеспеченная в здании 10, рассматривается в качестве примера. В этом случае, используется антенная линия 16, которая образует общую антенную систему. Антенная линия 16 проложена по всему зданию 10 от микшерного усилителя 12, и один терминал 18 или множество терминалов 18 для соединения с телевизионным устройством обеспечен/обеспечены в тракте антенной линии 16. Например, терминал 18 может быть обеспечен для каждого помещения.
[0039] Как описано выше, модуль 200 передачи принимает первый сигнал тайминга, генерируемый на основе первого радиосигнала, от глобальной спутниковой навигационной системы. Затем, модуль 200 передачи передает второй радиосигнал (сигнал IMES-TS/сигнал IMES-TAS), совместимый с радиосигналом от глобальной спутниковой навигационной системы, на основе сигнала, принятого приемником, и информации времени. Сигнал IMES-TAS включает в себя положение, тактовый сигнал, сигнал тайминга и информацию аутентификации.
[0040] Опорный модуль 100 электрически соединен с антенной линией 16 с промежуточно расположенным микшерным усилителем 12. Каждый модуль 200 передачи электрически соединен с опорным модулем 100 с любым промежуточно расположенным терминалом 18. А именно, RF сигнал передачи, выведенный из опорного модуля 100, выдается на каждый модуль 200 передачи через микшерный усилитель 12 и антенную линию 16, и каждый модуль 200 передачи генерирует сигнал IMES-TAS на основе RF сигнала передачи от опорного модуля 100 и передает сигнал IMES-TAS на базовую станцию 300. По меньшей мере один терминал 18 для соединения модуля 200 передачи, который демодулирует RF сигнал передачи, распространяющийся по антенной линии 16, обеспечен в ветви антенной линии 16. С принятием такой конфигурации, может достигаться системная синхронизация в системе мобильной связи, включающей в себя базовую станцию 300.
[0041] В системе временной синхронизации в соответствии с настоящим вариантом осуществления, обработка и функции сконфигурированы иерархически, и каждый уровень обработки и функции также называется "сегментом". Более конкретно, как показано на фиг. 3, обработка и функция для получения необходимой информации из сигнала GNSS или тому подобного называются "сегментом 1" или "S1". Обработка и функция для передачи информации, необходимой для генерации сигнала IMES-TAS или сигнала IMES-TS, называются "сегментом 2" или "S2". Обработка и функция, связанные с генерацией и передачей сигнала IMES-TAS или сигнала IMES-TS, называются "сегментом 3" или "S3".
[0042] В описании ниже, чтобы показать, какому сегменту принадлежит функция, описание будет дано с такой добавленной отметкой как "S1", "S2" или "S3".
[0043] Опорный модуль 100 включает в себя приемник 110 GNSS для обработки сигнала GNSS, принятого через антенну 102 GNSS и модулятор 120 S2 (S2TX), который генерирует RF сигнал передачи для генерирования сигнала IMES-TAS. Хотя показан пример конфигурации, в которой приемник 110 GNSS и модулятор 120 S2 установлены в опорный модуль 100, каждое устройство может быть установлено независимо. Подробности приемника 110 GNSS и модулятора 120 S2 будут описаны ниже.
[0044] Обычно, опорный модуль 100 получает информацию, служащую в качестве опоры для временной синхронизации на основе сигнала GNSS. Информация, служащая в качестве опоры для временной синхронизации, однако, не ограничена сигналом GNSS, а может использоваться другая информация.
[0045] Опорный модуль 100 может предоставить секретный ключ для генерирования кода аутентификации на модуль 200 передачи. В этом случае, опорный модуль 100 может принять секретный ключ, выпущенный любым сервером 108 аутентификации, и передать RF сигнал передачи, включающий в себя секретный ключ, на модуль 200 передачи. Секретный ключ, уникальный среди множества модулей 200 передачи, предпочтительно применяется в качестве секретного ключа. Поэтому опорный модуль 100 может включить в RF сигнал передачи секретный ключ, направленный на один модуль 200 передачи, и информацию идентификации, указывающую назначение секретного ключа как комбинируемого.
[0046] Сервер 108 аутентификации и опорный модуль 100 могут быть сконфигурированы, чтобы иметь возможность осуществлять связь друг с другом через сеть 109, такую как Интернет или частная сеть.
[0047] Модуль 200 передачи генерирует код аутентификации на основе информации времени, обеспеченной опорным модулем 100. Код аутентификации соответствует сообщению предписанной длины, вычисленной на основе информации времени, полученной приемником 100 GNSS, функционирующим как модуль получения опорного времени. Например, одноразовый пароль с привязкой ко времени (TOTP), зависимый от текущего значения времени, может использоваться в качестве такого кода аутентификации. Код аутентификации также упоминается ниже как "TOTP". Путем передачи такого TOTP как комбинируемого с информацией о положении и времени, положение может быть аутентифицировано.
[0048] Модуль 200 передачи включает в себя демодулятор 210 S2 (S2RX), который демодулирует RF сигнал передачи, передаваемый от модулятора 120 S2 и передатчика 220 S3 (S3TX), который генерирует сигнал IMES-TAS из результата демодуляции демодулятором 210 S2. Хотя показан пример конфигурации, в которой демодулятор 210 S2 и передатчик 220 S3 установлены в модуле 200 передачи, каждое устройство может быть установлено независимо. Подробности демодулятора 210 S2 и передатчика 220 S3 будут описаны ниже.
[0049] Фиг. 4 представляет собой схематичную диаграмму, показывающую примерную конфигурацию базовой станции 300, включенной в систему 1 мобильной связи в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 4, базовая станция 300 включает в себя радиопередатчик и приемник 310, который обменивается радиосигналом с мобильным терминалом в области соты, и приемник 320 S3 (S3RX), который принимает сигнал GNSS и сигнал IMES-TAS.
[0050] Антенна 340, используемая для передачи и приема радиосигнала на и от мобильного терминала, соединена с радиопередатчиком и приемником 310, и антенна 312 для приема сигнала GNSS или сигнала IMES-TAS соединена с приемником 320 S3. Базовая станция 300 может быть сконфигурирована, чтобы поддерживать любую схему связи. В качестве примера, когда базовая станция 300 поддерживает Долгосрочное развитие с временным разделением (TD-LTE), конфигурация для обмена данными с мобильным терминалом при множественном доступе с временным разделением принимается также для радиопередатчика и приемника 310. Базовая станция 300 может быть сконфигурирована, чтобы поддерживать также Долгосрочное развитие с дуплексным частотным разделением (FDD-LTE) в дополнение к TD-LTE. Поскольку конфигурация радиопередатчика и приемника 310 известна, его подробное описание не приводится. Подробности приемника 320 S3 будут описаны ниже.
[0051] Как описано выше, в соответствии с настоящим вариантом осуществления, система 1 мобильной связи может быть реализована с максимальным использованием уже предусмотренного оборудования. Когда базовая станция 300 предоставляется с использованием уже предусмотренного оборудования, как показано на фиг. 2, необходимо только заново обеспечить опорный модуль 100 и один модуль 200 передачи или множество модулей 200 передачи. Множество базовых станций 300 может использовать сигнал IMES-TAS, передаваемый от идентичного модуля 200 передачи. Поэтому, модули 200 передачи в том же количестве, что и заново обеспеченные базовые 300 станции, не требуется обеспечивать заново.
[0052] Таким образом, когда базовая станция 300, такая как микро базовая станция, должна быть обеспечена заново, это может быть реализовано с более низкими затратами с использованием системы временной синхронизации в соответствии с настоящим вариантом осуществления.
[0053] (a2: Второй пример реализации)
Хотя фиг. 1 и 2, описанные выше, показывают пример, в котором опорный модуль 100 обеспечен для каждого здания 10, может вводиться конфигурация, в которой один опорный модуль 100 совместно используется среди множества зданий 10. Конфигурация, способная достичь сокращения числа опорных модулей 100 по сравнению с системой 1 мобильной связи, показанной на фиг. 1 и 2, представлена в качестве примера ниже.
[0054] Фиг. 5 и 6 представляют собой, каждая, схематичную диаграмму, показывающую один пример системы 2 мобильной связи, включающей в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления. Система 2 мобильной связи, показанная на фиг. 5 и 6, сконфигурирована путем обеспечения заново множества базовых станций 300-1, 300-2, … в уже обеспеченном здании 10, аналогично системе 1 мобильной связи, показанной на фиг. 1-3.
[0055] Предполагается, что кабельное телевидение (CATV) было введено в уже обеспеченное здание 10. А именно, предполагается, что вводной провод 20 сети CATV соединен с микшерным усилителем 12. В такой конфигурации, сигнал IMES-TAS может использоваться во множестве зданий 10 путем обеспечения опорного модуля 100 где-то в сети CATV и передачи RF сигнала передачи через сеть CATV.
[0056] В конкретной конфигурации, как показано на фиг. 5, линии 32 передачи, которые составляют множество сетей CATV, соединены с головным узлом 30 станции вещания CATV, и разветвитель 34 приема соединен с линиями 32 передачи. Разветвитель 34 приема демодулирует и распределяет сигнал от станции вещания CATV и передает сигнал на множество зданий через множество вводных проводов 20.
[0057] В общем, коаксиальный кабель или оптический кабель применяется для линии 32 передачи. Система временной синхронизации в соответствии с настоящим вариантом осуществления применима без ограничения типом линии 32 передачи.
[0058] Как описано выше, в соответствии с настоящим вариантом осуществления, большое число систем 2 мобильной связи может быть реализовано с более низкими затратами путем максимального использования уже предусмотренного оборудования. Когда базовая станция 300 обеспечена с использованием уже предусмотренного оборудования, как показано на фиг. 6, уже обеспеченное здание 10, в том числе и вводные провода 20 уже предусмотренной сети CATV, не требуется модифицировать. Необходимо только обеспечить опорный модуль 100 в уже предусмотренной сети CATV и обеспечить один модуль 200 передачи или множество модулей 200 передачи в необходимом местоположении(ях) с использованием уже предусмотренной антенной линии 16 и терминала 18. Множество базовых станций 300 могут использовать сигнал IMES-TAS, передаваемый от идентичного модуля 200 передачи. Поэтому, модули 200 передачи в том же количестве, что и заново обеспеченные базовые станции 300, не требуется обеспечивать заново.
[0059] Таким образом, даже хотя базовая станция 300, такая как микро базовая станция, должна быть обеспечена заново, синхронизация систем среди всех базовых станций 300 может достигаться путем использования уже предусмотренного оборудования, такого как сеть CATV, и путем обеспечения опорного модуля 100 в станции вещания CATV или тому подобном в дополнение к необходимому числу модулей 200 передачи. Поэтому, даже хотя обеспечивается большое число базовых станций 300, затраты на ввод могут сдерживаться и может осуществляться широкое использование.
[0060] Без ограничения сетью CATV, когда обеспечена линия передачи, через которую некоторый сигнал может передаваться на и приниматься от множества зданий, система временной синхронизации в соответствии с настоящим вариантом осуществления может быть реализована также путем использования такой линии передачи. Например, может использоваться сеть экстренной связи в локальной области.
[0061] (a3: Точность в системной синхронизации)
Со ссылкой на фиг. 1 и 5, системная синхронизация может включать в себя подавление отклонения в тайминге между областями сот, обеспечиваемыми базовыми станциями 300, до предопределенного значения верхнего предела или ниже. Например, предполагаются области 350-1, 350-2, 350-3 и 350-4 сот, обеспеченные базовыми станциями 300-1, 300-2, 300-3 и 300-4, соответственно. В примере, показанном на фиг. 1 и 5, область 350-1 соты и область 350-2 соты перекрывают друг друга. Путем использования системы временной синхронизации в соответствии с настоящим вариантом осуществления, отклонение Terr1-2 тайминга между перекрывающими областями соты может подавляться, например, до±500 наносекунд или короче. Аналогично, отклонение Terr1-3 тайминга между областью 350-1 соты и областью 350-3 соты может также поддерживаться с аналогичной точностью. Отклонение Terr3-out тайминга между областью 400 соты, обеспеченной обычной базовой станцией (не показана), и областью 350-3 соты, обеспеченной базовой станцией 300-3, может также поддерживаться с аналогичной точностью. В отношении такой точности, в системе 1 мобильной связи, показанной на фиг. 1-3, отклонение в тайминге между опорным модулем 100 и модулем 200 передачи может подавляться до±500 наносекунд или короче.
[0062] (a4: Краткое изложение)
Как описано выше, в системе временной синхронизации в соответствии с настоящим вариантом осуществления, RF сигнал передачи на основе опорного времени, координируемого опорным модулем 100, распределяется на множество терминалов 18 как наложенный на линию передачи. Модуль 200 передачи, соединенный с каждым из терминалов 18, принимает распределенный RF сигнал передачи и беспроводным способом передает сигнал IMES-TAS, совместимый с сигналом GNSS, на базовую станцию 300, способную принимать сигнал GNSS. Базовая станция 300 реализует системную синхронизацию на основе сигнала IMES-TAS.
[0063] В системе временной синхронизации в соответствии с настоящим вариантом осуществления, сигнал IMES-TAS генерируется и подается модулем 200 передачи, обеспеченным по соседству с базовой станцией 300. Поэтому ограничения, связанные с трактом передачи от опорного модуля 100 до модуля 200 передачи, могут быть меньше. Поэтому уже предусмотренное оборудование может использоваться, и даже хотя должно быть обеспечено большое число базовых станций 300, их стоимость может быть уменьшена.
[0064] (a5: Услуга, которая может быть обеспечена)
Система временной синхронизации в соответствии с настоящим вариантом осуществления может обеспечивать услугу, как описано ниже.
[0065] (1) Обеспечение услуги глобальной навигации в помещении
Услуга глобальной навигации, совместимая с GNSS, и иерархическая информация могут быть обеспечены даже в помещении, где сигнал GNSS от GNSS (GPS или квази-зенитной спутниковой системы (QZSS)) не принимается успешно.
[0066] (2) Обеспечение информации времени в синхронизации с GNSS
Информация о христианском годе, месяце, дне, часе, минуте и секунде в синхронизации с GNSS может быть обеспечена. Високосный год или секунда координации (Всемирного времени) также учитываются.
[0067] (3) Обеспечение источника тайминга в синхронизации с GNSS
Сигнал тайминга (например, односекундный импульсный сигнал/1-PPS сигнал) в синхронизации с GNSS (GPS или QZSS) может быть обеспечен.
[0068] (4) Обеспечение источника частоты в синхронизации с GNSS
Источник частоты (тактовый сигнал), который может использоваться для сравнения и калибровки с GNSS (GPS или QZSS), может быть обеспечен.
[0069] (5) Услуга обеспечения аутентификации, использующая положение и время
Может быть обеспечена услуга аутентификации (например, TOTP, который будет описан ниже) для удостоверения "когда" и "где". В облачной услуге или услуге электронной коммерции, могут контролироваться ограничения на "когда" и "где" в дополнение к аутентификации пользователя для удостоверения "кто". Такая услуга аутентификации может предпочтительно функционировать, например, в качестве геозоны для облачной услуги.
[0070] (6) Обеспечение комплексной ID информации
Комплексная ID информация, которая может использоваться для выдачи сообщения или выпуска билета, может транслироваться от передатчика IMES-S3, соединенного с сетью, на мобильный терминал.
[0071] (7) Внутреннее распределение или внутренняя трансляция сообщения о бедствии
Обеспечена функция для приема сообщения о бедствии, транслируемого посредством QZSS или тому подобного, и для распространения или трансляции сообщения о бедствии на внутренний мобильный терминал. Более конкретно, опорный модуль 100 выполняет функцию для приема сообщения о бедствии, транслируемого от QZSS, и функцию для генерирования сообщения в соответствии с форматом сообщения IMES. С принятием такой конфигурации, даже мобильный терминал, расположенный в положении, где он неспособен принимать радиосигнал от QZSS (например, в помещении или в доме), может принимать сообщение о бедствии и выдает сообщение о бедствии пользователю. При помощи такой функции, может быть реализована внутренняя аварийная система.
[0072] Подробности каждого устройства, включенного в систему мобильной связи, включающую в себя систему временной синхронизации в соответствии с настоящим вариантом осуществления, будут описаны ниже.
[0073] <B. Получение опорного времени посредством опорного модуля 100>
Опорный модуль 100 получает время, служащее в качестве опоры в системе временной синхронизации, в соответствии с настоящим вариантом осуществления. Любой способ возможен в качестве способа получения времени. В системе временной синхронизации в соответствии с настоящим вариантом осуществления, применяется сигнал GNSS или метод протокола точного времени (PTP).
[0074] Когда применяется сигнал GNSS, приемник 110 GNSS устанавливается на опорный модуль 100. Приемник 110 GNSS принимает сигнал GNSS и получает различные типы информации, включая по меньшей мере информацию времени.
[0075] Любой сигнал GNSS может приниматься в качестве сигнала GNSS для приемника 110 GNSS для получения опорного времени. В качестве характерного примера, GPS, глобальная спутниковая навигационная система (GLONASS), спутниковая система функционального дополнения (SBAS), навигационная спутниковая система BeiDou, Galileo и квази-зенитная спутниковая система (QZSS) известны как GNSS. Может применяться любой сигнал GNSS, который может быть принят в положении, где обеспечен опорный модуль 100.
[0076] Универсальное устройство может быть принято для приемника 110 GNSS для приема сигнала GNSS. Приемник 110 GNSS выполняет операцию PVT (положение, скорость и время) на основе принятого сигнала GNSS. Приемник 110 GNSS выводит информацию, такую как информация о положении, информация времени и частотный сигнал, полученную посредством такой операции PVT и сигнала тайминга (1-PPS сигнала в примере GPS).
[0077] Таким образом, приемник 110 GNSS функционирует как модуль получения опорного времени, сконфигурированный, чтобы получать, на основе радиосигнала (сигнала GNSS) от GNSS, сигнал тайминга (например, 1-PPS сигнал) и информацию времени, соответствующую таймингу, указанному сигналом тайминга.
[0078] Вместо или в дополнение к сигналу GNSS, опора для временной синхронизации может быть получена с использованием метода PTP. Ведомый (подчиненный) тактовый генератор 104 согласно протоколу Института инженеров по электронике и электротехнике (IEEE) 1588 (PTP) или IEEE 1588v2 (PTPv2), может вводиться в качестве типового примера метода PTP (см. фиг. 2 и 3). Подчиненный тактовый генератор 104 находится во временной синхронизации с не показанным эталонным задающим тактовым генератором и обеспечивает информацию, служащую в качестве опоры для временной синхронизации, на модулятор 120 S2. Когда тактовый генератор в синхронизации с подчиненным тактовым генератором 104 дополнительно соединяется, подчиненный тактовый генератор 104 может устанавливаться как эталонный подчиненный тактовый генератор. Подчиненный тактовый генератор 104 может быть обеспечен в качестве резерва в случае неуспеха в приеме сигнала GNSS приемником 110 GNSS.
[0079] Вместо или в дополнение к сигналу GNSS, опора для временной синхронизации может быть получена из сигнала системной синхронизации, передаваемого от базовой станции системы мобильной связи. Когда принята эта конфигурация, например, может применяться приемник 106 для приема сигнала системной синхронизации. Приемник 106 может включать в себя схему, которая вычисляет время из декодированного сигнала системной синхронизации, в дополнение к схеме для приема радиосигнала и схеме для демодуляции радиосигнала, таким же, что и схемы, установленные в мобильном терминале. При использовании такого приемника 106, информация, служащая в качестве опоры для временной синхронизации, может быть предоставлена на модулятор 120 S2.
[0080] Опорный модуль 100 может получать информацию времени, сигнал тайминга или тому подобное от подчиненного тактового генератора 104. Когда используется метод PTP, информация о положении или тому подобное не может быть получена. Однако если системная синхронизация достигнута, не возникает проблемы в работе, даже хотя информация о положении не может быть получена.
[0081] Когда реализована система 2 мобильной связи, показанная на фиг. 5 и 6, большое число модулей 200 передачи используют RF сигнал передачи из опорного модуля 100. Поэтому высокая надежность предпочтительно достигается за счет повышения избыточности. С этой целью, множество приемников 110 GNSS могут быть установлены на опорном модуле 100, или опорный модуль 100 может быть обеспечен приемником 110 GNSS и подчиненным тактовым генератором 104.
[0082] <C. Модулятор 120 S2 опорного модуля 100 и RF сигнал передачи>
Теперь будет описана обработка для генерирования RF сигнала передачи в модуляторе 120 S2 опорного модуля 100.
[0083] Модулятор 120 S2 генерирует RF сигнал передачи путем модулирования различных типов информации, такой как информация времени, включенная в сигнал GNSS, принятый приемником 110 GNSS. Модулятор 120 S2 генерирует RF сигнал передачи в синхронизации с сигналом тайминга (1-PPS сигналом). RF сигнал передачи накладывается на уже обеспеченную общую антенную систему и/или уже обеспеченную сеть CATV. Как описано выше, RF сигнал передачи, наложенный на общую антенную систему или сеть CATV, передается во все помещения, соединенные с общей антенной системой.
[0084] Таким образом, модулятор 120 S2 функционирует как модулятор, соединенный с линией, разветвленной на множество ветвей, и сконфигурирован, чтобы генерировать модулированный сигнал (RF сигнал передачи), включающий в себя соответствующую информацию времени в синхронизации с сигналом тайминга (1-PPS сигналом), и чтобы отправлять модулированный сигнал по линии. Любое из проводника (металлического провода) и оптического волокна может вводиться как линия, по которой отправляется RF сигнал передачи. Например, по меньшей мере любая из линии сигнала общей антенной системы, линии сигнала CATV и линии сигнала для связи (телефонной, цифровой абонентской линии (DSL) и волокна до дома (FTTH)) может использоваться для такой линии.
[0085] Аудио и видео сигнал обычно передается через один частотный канал или множество частотных каналов на уже обеспеченную общую антенную систему и уже обеспеченную сеть CATV. Поэтому, при наложении RF сигнала передачи, должен использоваться незанятый канал с достаточной полосой передачи. С учетом таких обстоятельств, в модуляторе 120 S2, RF частота сгенерированного RF сигнала передачи является предпочтительно переменной в соответствии с незанятым каналом. Ширина частоты, занятой RF сигналом передачи, также предпочтительно адаптируется к незанятому каналу.
[0086] В системе временной синхронизации в соответствии с настоящим вариантом осуществления, в качестве примера, сигнал ввода, выведенный из приемника 110 GNSS, преобразуется в цифровой сигнал с использованием фазовой манипуляции (PSK). В качестве примера фазовой манипуляции, может вводиться модуляция двоичной фазовой манипуляцией (BPSK).
[0087] Фиг. 7 представляет собой блок-схему, показывающую примерную конфигурацию схемы модулятора 120 S2, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 7, модулятор 120 S2 включает в себя схему 121 генерации сигнала промежуточной частоты (IF), осциллятор 125 несущей и схему 126 повышающего преобразования.
[0088] Схема 121 генерации сигнала IF выводит сигнал IF, являющийся результатом обработки входного сигнала из приемника 110 GNSS и модуляции BPSK. Входной сигнал содержит информацию времени и телеметрический сигнал. Слово синхронизации (которое также называется "словом SYNC" ниже) добавляется в каждый набор информации времени и телеметрического сигнала, чтобы тем самым облегчить обработку демодуляции посредством демодулятора 210 S2 модуля 200 передачи, как будет описано ниже.
[0089] Более конкретно, схема 121 генерации сигнала IF включает в себя схему 122 модуляции, фильтр нижних частот (LPF) 123 и цифро-аналоговый преобразователь (DAC) 124.
[0090] Схема 122 модуляции генерирует модулированный сигнал путем извлечения информации времени и телеметрического сигнала из информации, включенной во входной сигнал, из приемника 110 GNSS на основе сигнала тайминга из приемника 110 GNSS, добавления в него слова SYNC и осуществления его модуляции NRZ-BPSK. Когда сигнал IMES-TAS содержит код аутентификации, код аутентификации вводится в схему 122 модуляции, так что генерируется модулированный сигнал, включающий в себя код аутентификации.
[0091] Полоса сигнала, подвергнутого модуляции NRZ-BPSK, ограничивается фильтром с конечным импульсным откликом (FIR). Например, после приема входа на частоте TBD [МГц] в соответствии с незанятым каналом по пути передачи, на который наложен RF сигнал передачи, схема 122 модуляции выводит модулированный сигнал, имеющий центральную частоту TBD. В настоящем варианте осуществления, битовая скорость модулированного сигнала предполагается как 1 Мб/с. Схема модуляции и битовая скорость модулированного сигнала, однако, не ограничены конкретно конфигурацией, описанной выше, но оптимальная схема модуляции и битовая скорость могут выбираться в качестве подходящих согласно требуемым спецификациям или конфигурации системы. Например, модуляция квадратурной фазовой манипуляцией (QPSK) может применяться вместо модуляции двоичной фазовой манипуляцией (BPSK), или может применяться схема без возврата к нулю с инверсией (NRZI) вместо схемы без возврата к нулю (NRZ). При таком изменении в схеме модуляции, битовая скорость или тому подобное может также изменяться подходящим образом.
[0092] Модулированный сигнал, выводимый из схемы 122 модуляции, ограничивается по полосе фильтром нижних частот 123, подвергается аналоговому преобразованию цифро-аналоговым преобразователем 124 и выводится как сигнал IF.
[0093] Схема 122 модуляции или схема 122 модуляции и ее периферийная схема могут выполнять цифровую обработку с использованием программируемой вентильной матрицы (FPGA).
[0094] Схема 126 повышающего преобразования преобразует с повышением частоты сигнал IF от схемы 122 модуляции при помощи волн несущей (например, на частоте 10 МГц) из осциллятора 125 несущей и выводит результирующий сигнал IF в качестве RF сигнала передачи. Конкретно, схема 126 повышающего преобразования включает в себя смеситель 127, переменный усилитель 128 и фильтр нижних частот 129. Смеситель 127 умножает сигнал IF из схемы 122 модуляции на волны несущей из осциллятора 125 несущей. Сигнал, выводимый из смесителя 127, выводится как RF сигнал передачи через переменный усилитель 128 и фильтр нижних частот 129.
[0095] Фиг. 8 представляет собой диаграмму, показывающую примерную структуру RF сигнала передачи, генерируемого модулятором 120 S2, включенным в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 8, модулятор 120 S2 генерирует RF сигнал передачи в синхронизации с периодически выводимым сигналом тайминга (1-PPS сигналом). Обычно, положение начала слова SYNC, включенного в каждый RF сигнал передачи, и нарастание (или спад) сигнала тайминга совпадают друг с другом. При такой конфигурации, демодулятор 210 S2 модуля 200 передачи может воспроизводить сигнал тайминга в дополнение к информации времени. RF сигнал передачи включает в себя слово SYNC в дополнение к информации времени, и RF сигнал передачи, включающий в себя слово SYNC, отправляется по линии с таймингом, определенным из момента времени вывода сигнала тайминга, в качестве опоры.
[0096] При конфигурации схемы, как изложено выше, может генерироваться RF сигнал передачи, включающий в себя входной сигнал из приемника 110 GNSS.
[0097] <D. Демодулятор 210 S2 модуля 200 передачи>
Теперь будет описана обработка для демодуляции RF сигнала передачи демодулятором 210 S2 модуля 200 передачи.
[0098] Демодулятор 210 S2 демодулирует RF сигнал передачи, передаваемый через общую антенную систему и/или сеть CATV, и извлекает данные, включенные в RF сигнал передачи.
[0099] Система временной синхронизации в соответствии с настоящим вариантом осуществления выполняет функцию для коррекции задержки передачи в RF сигнале передачи (функция коррекции задержки), в зависимости от пути передачи от модулятора 120 S2 опорного модуля 100 на демодулятор 210 S2 модуля 200 передачи. Величина коррекции (время коррекции) для задержки передачи может быть установлена в фиксированное значение, определенное заранее, или переменное значение, которое динамически изменяется в соответствии с состоянием пути передачи.
[0100] Когда реальная общая антенная система и сеть CATV предполагаются в качестве пути передачи, направление передачи RF сигнала передачи является однонаправленным и RF сигнал передачи занимает частоту конкретного незанятого канала. Поэтому достаточно использовать некоторую задержку передачи, определенную заранее. Однако может быть обеспечена функция для автоматической коррекции времени задержки, как будет описано ниже.
[0101] Фиг. 9 представляет собой блок-схему, показывающую примерную конфигурацию схемы демодулятора 210 S2, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 9, демодулятор 210 S2 выводит демодулированные данные в синхронизации с сигналом тайминга (1-PPS сигналом) путем преобразования RF сигнала передачи, принятого от модулятора 120 S2, в сигнал IF, демодуляции сигнала IF в цифровой сигнал и обнаружения слова SYNC, включенного в демодулированный цифровой сигнал. Конкретно, демодулятор 210 S2 включает в себя схему 212 понижающего преобразования, схему 214 демодуляции, осциллятор 217 несущей и системный осциллятор 218.
[0102] Схема 212 понижающего преобразования преобразует с понижением частоты принятый RF сигнал передачи при помощи волн несущей из осциллятора 217 несущей и выводит результирующий RF сигнал передачи как сигнал IF (компонент I и компонент Q). Осциллятор 217 несущей генерирует волны несущей в соответствии с тактовым сигналом, полученным путем деления частоты контурно-управляемого тактового сигнала из системного осциллятора 218. Конкретно, схема 212 понижающего преобразования включает в себя переменный усилитель 2121, смеситель 2122, усилители 2123 и 2125 и фильтры нижних частот 2124 и 2126.
[0103] RF сигнал передачи регулируется по амплитуде переменным усилителем 2121 и умножается в смесителе 2122 на волны несущей из осциллятора 217 несущей, так что компонент I и компонент Q выводятся в качестве сигнала IF. Компонент I RF сигнала передачи, выведенный из смесителя 2122, выводится на схему 214 демодуляции через усилитель 2123 и фильтр нижних частот 2124. Аналогично, компонент Q RF сигнала передачи, выведенный из смесителя 2122, выводится на схему 214 демодуляции через усилитель 2125 и фильтр нижних частот 2126.
[0104] Схема 214 демодуляции выводит демодулированные данные путем демодуляции сигнала IF, выведенного из схемы 212 понижающего преобразования. Конкретно, схема 214 демодуляции включает в себя аналого-цифровые преобразователи 2141 и 2142, фазовращатель 2143, фильтры нижних частот 2144 и 2145, смеситель 2146, секцию 2147 битовой синхронизации, секцию 2148 восприятия SYNC, секцию 2149 извлечения данных, секцию 2150 последовательно/параллельного преобразования, секцию 2151 хранения величин коррекции задержки, секцию 2152 регулировки синхронизации, секцию 2153 сравнения фазы, делители частоты 2154 и 2159, контурные фильтры 2156 и 2157, цифро-аналоговый преобразователь 2158 и усилитель 2160. Вся или часть схемы 214 демодуляции может выполнять цифровую обработку с использованием FPGA.
[0105] Компонент I и компонент Q из схемы 212 понижающего преобразования преобразуются в цифровые сигналы посредством соответственных аналого-цифровых преобразователей 2141 и 2142 и выводятся на фазовращатель 2143. Компонент I и компонент Q подвергаются демодуляции BPSK в фазовращателе 2143, и результат демодуляции выводится на смеситель 2146. Результат демодуляции компонента I вводится в секцию 2147 битовой синхронизации и демодулируется в битовую строку. Секция 2148 восприятия SYNC генерирует сигнал тайминга (1-PPS сигнал) путем восприятия слова SYNC, включенного в битовую строку, выведенную из секции 2147 битовой синхронизации. Сигнал тайминга из секции 2148 восприятия SYNC выводится на секцию 2152 регулировки синхронизации. Секция 2149 извлечения данных извлекает данные, следующие за словом SYNC, воспринятым секцией 2148 восприятия SYNC. Наконец, данные, извлеченные секцией 2149 извлечения данных, преобразуются в предписанный формат данных в секции 2150 последовательно-параллельного преобразования и выводятся как демодулированные данные. Демодулированные данные подаются на передатчик 220 S3. Секция 2150 последовательно-параллельного преобразования может быть реализована, например, схемой, такой как универсальный асинхронный приемопередатчик (UART).
[0106] Когда сигнал IMES-TAS содержит секретный код, может быть дополнительно установлен интерфейс для безопасного вывода секретного кода, включенного в результат демодуляции RF сигнала передачи.
[0107] Смеситель 2146 образует часть контура, называемого контуром Костаса, и вывод из смесителя 2146 подается в системный осциллятор 218 через контурный фильтр 2157 и цифро-аналоговый преобразователь 2158. Системный осциллятор 218 представляет собой осциллятор, сконфигурированный, чтобы обеспечивать системный тактовый сигнал для схемы 214 демодуляции, и предназначен для генерации, например, тактового сигнала 100 МГц, что представляет собой частоту в десять раз более высокую, чем волны несущей (например, 10 МГц) RF сигнала передачи. Системный осциллятор 218 изменяет частоту осцилляции в соответствии с сигналом обратной связи из цифро-аналогового преобразователя 2158. Управляемый напряжением кварцевый осциллятор (VCXO) или кварцевый осциллятор с температурной компенсацией (TCXO) могут приниматься в качестве системного осциллятора 218.
[0108] Системный тактовый сигнал из системного осциллятора 218 разделяется по частоте на 1/10 делителем частоты 2159 и воспроизводится как волны несущей принятого RF сигнала передачи. Таким образом, волны несущей (10 МГц) RF сигнала передачи выводятся путем демодуляции сигнала, подвергнутого модуляции BPSK посредством контура Костаса, и воспроизведения сигнала посредством контура воспроизведения несущей.
[0109] Секция 2148 восприятия SYNC воспроизводит сигнал тайминга (1-PPS сигнал) путем восприятия слова SYNC, включенного в RF сигнал передачи. Сигнал тайминга из секции 2148 восприятия SYNC корректируется по задержке передачи посредством секции 2152 регулировки синхронизации и сравнивается по фазе с сигналом тайминга (1 Гц), генерируемым в схеме 214 демодуляции системным осциллятором 218. А именно, сигнал тайминга из секции 2152 регулировки синхронизации, и сигнал тайминга, полученный делением частоты системного тактового сигнала посредством делителя частоты 2154, вводятся в секцию 2153 сравнения фазы. Разность фаз, обнаруженная секцией 2153 сравнения фазы, подается на фазовращатель 2143 через контурный фильтр 2156. В результате такой операции контура, фаза, введенная в контур Костаса, сдвигается надлежащим образом, так что сигнал тайминга (1-PPS сигнал) и системный тактовый сигнал могут быть синхронизированы друг с другом. Например, сигнал тайминга, полученный путем деления частоты системного тактового сигнала делителем частоты 2154, выводится как 1-PPS сигнал. В это время, сигнал тайминга (1-PPS сигнал) выводится с опережением тайминга восприятия слова SYNC, включенного в RF сигнал передачи, с учетом задержки передачи. А именно, сигнал тайминга (1-PPS сигнал) выводится до извлечения данных, следующих за словом SYNC.
[0110] Как изложено выше, демодулятор 210 S2 функционирует как демодулятор, соединенный с любой ветвью линии, разветвленной на множество ветвей, и сконфигурированный, чтобы демодулировать модулированный сигнал (RF сигнал передачи), распространяющийся по линии. Как показано на фиг. 1 и 5, обычно, множество демодуляторов 210 S2 обеспечены для одного опорного модуля 100.
[0111] Функция для коррекции задержки передачи RF сигнала передачи (функция коррекции задержки), принятая в системе временной синхронизации в соответствии с настоящим вариантом осуществления, главным образом выполняется секцией 2151 хранения величин коррекции задержки и секцией 2152 регулировки синхронизации. Путем установки определенного времени задержки, определяемого заранее в секции 2151 хранения величин коррекции задержки, сигнал тайминга (1-PPS сигнал) корректируется на установленное время, так что задержка передачи RF сигнала передачи может быть скорректирована. Более конкретно, когда демодулятор 210 S2 обнаруживает слово SYNC, включенное в модулированный сигнал (RF сигнал передачи), распространяющийся по линии, он выводит информацию, следующую за обнаруженным словом SYNC, как демодулированные данные и выводит сигнал тайминга (1-PPS сигнал) с таймингом, определенным из момента времени, предшествующего моменту времени обнаружения слова SYNC на предопределенное время коррекции, в качестве опоры. За счет применения такой функции коррекции задержки, вывод сигнала тайминга (1-PPS сигнал) отклоняется от вывода демодулированных данных. 1-PPS сигнал, однако, имеет высокую точность по своему периоду. Поэтому, с использованием такой периодичности, не возникает проблемы при генерации и передаче сигнала IMES-TAS.
[0112] При помощи функции коррекции задержки демодулятора 210 S2 в соответствии с настоящим вариантом осуществления, RF сигналы передачи, обработанные модулями 200 передачи, соединенными с идентичной системой временной синхронизации, могут поддерживаться в синхронизированном состоянии с точностью±500 нс (целевое значение).
[0113] При принятии конфигурации, как изложено выше, демодулятор 210 S2, соединенный с терминалом 18 в каждом помещении, выводит информацию, такую как информация о положении, информация времени и сигнал частоты, и сигнал тайминга (1-PPS сигнал) посредством обработки демодуляции и обработки отслеживания синхронизации для RF сигнала передачи.
[0114] <E. S3 Передатчик 220 модуля 200 передачи>
Теперь будет описана обработка для генерирования и передачи сигнала IMES-TAS в передатчике 220 S3 модуля 200 передачи. Передатчик 220 S3 генерирует и передает сигнал IMES-TAS на основе демодулированных данных и сигнала тайминга из демодулятора 210 S2. Например, когда приемник 320 S3 базовой станции 300 адаптирован к GPS, представляющей GNSS, RF частота сигнала IMES-TAS установлена в 1,57542 ГГц. RF частота может изменяться подходящим образом согласно ограничениям, наложенным администрированием радиоволн в месте, где применяется настоящая система. Когда настоящая система установлена как система, совместимая с глобальной спутниковой навигационной системой, отличной от GPS, может быть принята одна RF частота или множество RF частот в соответствии с глобальной спутниковой навигационной системой, представляющей интерес.
[0115] (e1: Конфигурация схемы)
Фиг. 10 представляет собой блок-схему, показывающую примерную конфигурацию схемы передатчика 220 S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 10, передатчик 220 S3 включает в себя блок 221 цифровой обработки, электронно-стираемую и программируемую постоянную память 222 (EEPROM), блок 223 аналоговой обработки, антенну 224, цифровой интерфейс 225 ввода и вывода, интерфейс 226 тайминга, осциллятор 227, блок 223 аналоговой обработки, электрически соединенный с блоком 221 цифровой обработки, и источник 228 питания.
[0116] Блок 221 цифровой обработки включает в себя центральный процессор (CPU) 2212 и память с произвольным доступом (RAM) 2214. EEPROM 222, цифровой интерфейс 225 ввода и вывода, интерфейс 226 тайминга и осциллятор 227 электрически соединены с блоком 221 цифровой обработки. Антенна 224 электрически соединена с блоком 223 аналоговой обработки.
[0117] EEPROM 222 хранит программу, исполняемую CPU 2212 блока 221 цифровой обработки, и данные, необходимые для генерирования сигнала IMES и сигнала IMES-TAS. Программа и необходимые данные, хранящиеся в EEPROM 222, считываются во время запуска передатчика 220 S3 и переносятся в RAM 2214. EEPROM 222 может дополнительно хранить данные, введенные извне передатчика 220 S3. Хранилище для хранения программы и необходимых данных не ограничено EEPROM 222, и может применяться по меньшей мере хранилище, способное сохранять данные энергонезависимым образом.
[0118] Блок 221 цифровой обработки принимает через цифровой интерфейс 225 ввода и вывода демодулированные данные (информацию, такую как информация о положении, информация времени и сигнал частоты), полученные из демодулятора 210 S2, и принимает через интерфейс 226 тайминга сигнал тайминга (1-PPS сигнал), полученный из демодулятора 210 S2, и генерирует данные, которые должны представлять собой источник генерации сигнала IMES и сигнала IMES-TAS. Блок 221 цифровой обработки отправляет сгенерированные данные как битовый поток на блок 223 аналоговой обработки.
[0119] Осциллятор 227 подает тактовый сигнал, который определяет операции посредством CPU 2212, или тактовый сигнал для генерации волн несущей на блок 221 цифровой обработки.
[0120] Блок 223 аналоговой обработки генерирует сигнал передачи путем модулирования битового потока, выведенного из блока 221 цифровой обработки, при помощи волн несущей 1,57542 ГГц и отправляет сигнал передачи на антенну 224. Сигнал отправляется из антенны 224. Сигнал IMES и сигнал IMES-TAS, таким образом, отправляются из передатчика 220 S3.
[0121] Источник 228 питания предоставляет электропитание на каждый секцию, которая образует передатчик 220 S3. Источник 228 питания может содержаться в передатчике 220 S3, как показано на фиг. 10, или может принимать подачу электропитания извне.
[0122] Хотя CPU 2212 применяется в качестве процессора для выполнения обработки в блоке 221 цифровой обработки в приведенном выше описании, может применяться другой процессор. Альтернативно, блок 221 цифровой обработки может быть реализован посредством FPGA.
[0123] Хотя тактовый сигнал (Clk) подается из блока 221 цифровой обработки на блок 223 аналоговой обработки на фиг. 10, он может напрямую подаваться из осциллятора 227 на блок 223 аналоговой обработки.
[0124] Хотя блок 221 цифровой обработки и блок 223 аналоговой обработки показаны отдельно для ясности описания в настоящем варианте осуществления, они могут быть установлены вместе в одном чипе при реализации.
[0125] (e2: Формат сообщения: пример сигнала IMES-TS (No. 1))
Теперь будет описан один пример формата сообщения сигнала IMES-TS, исходящего из передатчика 220 S3. В системе временной синхронизации в соответствии с настоящим вариантом осуществления, в качестве примера, вводится сигнал на основе IMES. Поэтому, конфигурация сигнала, введенного как сигнал IMES-TS, также предпочтительно может быть обратно совместимой с сигналом IMES. А именно, передатчик 220 S3 функционирует как передатчик, сконфигурированный, чтобы передавать радиосигнал, соответствующий радиосигналу из GNSS (сигналу GNSS) на основе сигнала тайминга (1-PPS сигнала), и информацию времени, полученную посредством демодуляции соответствующим демодулятором 210 S2.
[0126] Фиг. 11 представляет собой диаграмму, показывающую один пример типа сообщения (MT) сигнала, передаваемого от передатчика 220 S3, включенного в систему временной синхронизации, в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 11, в дополнение к четырем типам сообщения (MT0, MT1, MT3 и MT4), определенным как известные сигналы IMES, формат 260A сообщения (MT7) может быть принят для сигнала IMES-TS. Сообщение, показанное на фиг. 11, представлено в качестве примера, и может использоваться любой формат сообщения в случае, если сообщение включает в себя информацию, необходимую для временной синхронизации.
[0127] В качестве примера, формат 260A сообщения включает в себя информацию о совместимой с сообщением GPS Nav GPS неделе и времени недели (TOW), месяце, дне, часе, минуте и секунде. Подробности формата 260A сообщения описаны.
[0128] Фиг. 12 представляет собой диаграмму, показывающую один пример структуры кадра формата 260A сообщения, используемого в качестве сигнала IMES-TS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 12, формат 260A сообщения, показанный на фиг. 12, согласован с форматом, совместимым с сообщением GPS Nav.
[0129] Конкретно, формат 260A сообщения составлен из четырех слов 261, 262, 263 и 264. Каждое из слов 261, 262, 263 и 264 составлено из тридцати битов. Первое слово 261 включает в себя область 2611 преамбулы, область 2612 типа сообщения, телеметрическую область 2613 и область 2614 бита четности. Второе слово 262 включает в себя область 2621 счетчика, область 2627 секунды координации, область 2628 GPS недели, область 2625 источника времени и область 2626 бита четности. Третье слово 263 включает в себя область 2631 счетчика, область 2637 TOW, область 2635 работоспособности спутника и область 2636 бита четности. Время недели (TOW) означает всего секунд с начала недели. Четвертое слово 264 включает в себя область 2641 счетчика, часовую область 2642, минутную область 2643, секундную область 2644, область 2645 работоспособности спутника и область 2646 бита четности.
[0130] Путем использования информации, хранящейся в области 2628 GPS недели (неделя(и), прошедшая с опорного дня (6 января 1980)), и информации, хранящейся в области 2637 TOW, включенной в формат 260A сообщения, христианский год, месяц, день, час, минута и секунда могут вычисляться как информация времени.
[0131] Как показано на фиг. 11, сигнал IMES-TS сконфигурирован как кадр, составленный из множества слов.
[0132] (e3: Формат сообщения: пример сигнала IMES-TS (No. 2))
Теперь будет описан другой пример формата сообщения сигнала IMES-TS, исходящего из передатчика 220 S3. В системе временной синхронизации в соответствии с настоящим вариантом осуществления, в качестве примера, принят сигнал на основе IMES. Поэтому, конфигурация сигнала, принятая как сигнал IMES-TS, также предпочтительно может быть обратно совместимой с сигналом IMES. А именно, передатчик 220 S3 функционирует как передатчик, сконфигурированный, чтобы передавать радиосигнал, совместимый с радиосигналом от GNSS (сигналом GNSS) на основе сигнала тайминга (1-PPS сигнала), и информацию времени, полученную посредством демодуляции соответствующим демодулятором 210 S2.
[0133] Фиг. 13 представляет собой диаграмму, показывающую другой пример типа сообщения (MT) сигнала, передаваемого от передатчика 220 S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 13, в дополнение к четырем типам сообщения, определенным как известные сигналы IMES, два типа форматов 250 и 260 сообщения могут быть приняты как сигналы IMES-TS. Оба из двух типов форматов сообщения не обязательно должны быть установлены, и любой один из них может быть установлен. Сообщение, показанное на фиг. 13, представлено в качестве примера, и может использоваться любой формат сообщения в случае, если оно включает в себя информацию, необходимую для временной синхронизации.
[0134] В качестве примера, формат 250 сообщения включает в себя информацию о совместимой с сообщением GPS Nav GPS неделе и TOW. Формат 260 сообщения включает в себя информацию о христианском годе, месяце, дне, часе, минуте и секунде. То, какой из формата 250 сообщения и формата 260 сообщения следует использовать, определяется надлежащим образом согласно способу установки приемника 320 S3. Таким образом, сигнал IMES-TS может поддерживать по меньшей мере один из формата 250 сообщения и формата 260 сообщения. Подробности каждого формата сообщения будут описаны ниже.
[0135] Фиг. 14 представляет собой диаграмму, показывающую один пример структуры кадра формата 250 сообщения, используемого в качестве сигнала IMES-TS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Формат 250 сообщения, показанный на фиг. 14, представляет собой формат, совместимый с сообщением GPS Nav. Когда приемник 320 S3 адаптирован для GPS, он включает в себя декодер сообщений, сконфигурированный, чтобы обрабатывать формат 250 сообщения. Поэтому, христианский год, месяц, день, час, минута и секунда могут быть получены как информация времени без модифицирования декодера сообщений.
[0136] Конкретно, формат 250 сообщения составлен из трех слов 251, 252 и 253. Каждое из слов 251, 252 и 253 составлено из тридцати битов. Первое слово 251 включает в себя область 2511 преамбулы, область 2512 типа сообщения, телеметрическую область 2513 и область 2514 бита четности. Второе слово 252 включает в себя область 2521 счетчика, область 2522 секунды координации, область 2523 GPS недели, область 2524 источника времени и область 2525 бита четности. Третье слово 253 включает в себя область 2531 счетчика, область 2532 TOW, область 2533 работоспособности спутника и область 2534 бита четности.
[0137] С использованием информации, хранящейся в области 2523 GPS недели (неделя(и), прошедшая с опорного дня (6 января 1980)), и информации, хранящейся в области 2532 TOW, включенной в формат 250 сообщения, христианский год, месяц, день, час, минута и секунда могут вычисляться как информация времени.
[0138] Фиг. 15 представляет собой диаграмму, показывающую один пример структуры кадра формата 260 сообщения, используемого как сигнал IMES-TS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 15, формат 260 сообщения, показанный на фиг. 15, представляет собой формат, который непосредственно выражает христианский год, месяц, день, час, минуту и секунду.
[0139] Конкретно, формат 260 сообщения составлен из трех слов 261, 262 и 263. Каждое из слов 261, 262 и 263 составлено из тридцати битов. Первое слово 261 включает в себя область 2611 преамбулы, область 2612 типа сообщения, телеметрическую область 2613 и область 2614 бита четности. Второе слово 262 включает в себя область 2621 счетчика, область 2622 года, область 2623 месяца, область 2624 дня, область 2625 источника времени и область 2626 бита четности. Третье слово 263 включает в себя область 2631 счетчика, часовую область 2632, минутную область 2633, секундную область 2634, область 2635 работоспособности спутника и область 2636 бита четности.
[0140] С использованием информации, хранящейся в каждой из области 2622 года, области 2623 месяца, области 2624 дня, часовой области 2632, минутной области 2633 и секундной области 2634, включенных в формат 260 сообщения, как таковой, христианский год, месяц, день, час, минута и секунда могут быть получены как информация времени.
[0141] Как показано на фиг. 14 и 15, сигнал IMES-TS сконфигурирован как кадр, составленный из множества слов.
[0142] (e4: Формат сообщения: пример сигнала IMES-TAS (No. 1))
Теперь будет описан один пример формата сообщения сигнала IMES-TAS, исходящего из передатчика 220 S3. В системе временной синхронизации в соответствии с настоящим вариантом осуществления, в качестве примера, принят сигнал на основе IMES. Поэтому, конфигурация сигнала, принятая как сигнал IMES-TAS, также предпочтительно может быть обратно совместимой с сигналом IMES. А именно, передатчик 220 S3 функционирует как передатчик, сконфигурированный, чтобы передавать радиосигнал, соответствующий радиосигналу от GNSS (сигналу GNSS) на основе сигнала тайминга (1-PPS сигнала), и информацию времени, полученную посредством демодуляции соответствующим демодулятором 210 S2.
[0143] Фиг. 16 представляет собой диаграмму, показывающую еще один другой пример типа сообщения (MT) сигнала, передаваемого из передатчика 220 S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 16, в дополнение к четырем типам сообщения, определенным как известные сигналы IMES, формат 270 сообщения может быть принят как сигнал IMES-TAS. Сообщение, показанное на фиг. 16, представлено в качестве примера, и любой формат сообщения может использоваться в случае, если оно включает в себя информацию, необходимую для временной синхронизации.
[0144] Формат 270 сообщения (MT7) сигнала IMES-TAS, показанного на фиг. 16, расширен, чтобы иметь возможность передавать больше информации, в то время как он поддерживает совместимость с существующим форматом сообщения путем введения принципа "страницы". Конкретно, путем комбинирования значения типа сообщения и значения страницы для формата 270 сообщения, сообщение, включающее в себя больше слов, чем существующие слова, может передаваться как сообщение конкретного типа сообщения. Хотя фиг. 16 показывает пример, в котором три страницы данных четырех слов могут быть представлены в формате 270 сообщения, число страниц может быть расширено до необходимого числа страниц без ограничения.
[0145] Фиг. 17 и 18 каждая представляет собой диаграмму, показывающую один пример структуры кадра формата 270 сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Формат 270 сообщения может включать в себя переменное число страниц в зависимости от применения. В дополнение к примеру, включающему в себя только формат сообщения (четыре слова/для одной страницы), показанный на фиг. 17, может также быть принята конфигурация формата сообщения, показанного на фиг. 17, и формата сообщения, показанного на фиг. 18, как комбинируемых (восемь слов в целом/для двух страниц). Конфигурация формата сообщения (четыре слова), показанного на фиг. 18 как повторно комбинируемого (четыре слова × число страниц в целом), также может быть принята. Длина (число слов/число страниц) такого формата сообщения может быть переменной в зависимости от применения.
[0146] Формат 270 сообщения, показанный на фиг. 17 и 18, представляет собой формат, совместимый с сообщением GPS Nav. Когда приемник 320 S3 адаптирован к GPS, он включает в себя декодер сообщений, сконфигурированный, чтобы обрабатывать формат 270 сообщения. Поэтому, христианский год, месяц, день, час, минута и секунда могут быть получены как информация времени без модифицирования декодера сообщений.
[0147] Конкретно, формат 270 сообщения составлен из по меньшей мере четырех слов 271, 272, 273 и 274. Когда код аутентификации добавляется, слова 275, 276, 277 и 278, показанные на фиг. 18, могут комбинироваться. Каждое из слов 271, 272, 273, 274, 275, 276, 277 и 278 составлено из тридцати битов.
[0148] Первое слово 271 включает в себя область 2711 преамбулы, область 2712 типа сообщения, в которой хранится информация для указания типа сообщения, телеметрическую область 2713, в которой хранится телеметрическая информация, и область 2714 бита четности.
[0149] Второе слово 272 включает в себя область 2721 счетчика, в которой хранится число подсчитанных сообщений, область 2722 страницы сообщения, область 2723 секунды координации, область 2724 GPS недели, в которой хранится (хранятся) неделя(и), прошедшая с опорного дня (например, 6 января 1980), и область 2725 бита четности. В области 2723 секунды координации хранится информация, указывающая тайминг секунды координации, подлежащей введению или удалению, и информация, указывающая введение или удаление.
[0150] Поскольку формат 270 сообщения может быть сконфигурирован по множеству страниц (четыре слова на одну страницу), информация для указания, на какой из нескольких страниц находится каждое сообщение, хранится в области 2722 страницы сообщения.
[0151] Третье слово 273 включает в себя область 2731 счетчика, область 2732 TOW, область 2733 LAS, область 2734 источника времени и область 2735 бита четности. В области 2732 TOW хранится значение счета, увеличиваемое на один каждые 1,5 секунды начиная с 0 ночи в воскресенье, что определяется как начальный момент. Когда формат 270 сообщения передается каждые три секунды, значение, увеличиваемое на два счета между предшествующим сигналом IMES-TAS и последующим сигналом IMES-TAS, сохраняется в области 2732 TOW. В области 2733 LAS хранится значение состояния, указывающее, активировано или нет применение секунды координации.
[0152] Четвертое слово 274 включает в себя область 2741 счетчика, область 2742 недели применения секунды координации, область 2743 дня применения секунды координации, область 2744 применения секунды координации, ID 2745 передатчика, область 2746 работоспособности спутника и область 2747 бита четности. Тайминг применения секунды координации планируется на основе прошедшей недели (недель), хранящейся в области 2742 недели применения секунды координации, и дня недели, хранящегося в области 2743 дня применения секунды координации. Длина секунды координации, подлежащей применению, определена в области 2744 применения секунды координации. Например, то, следует ли применять "одну секунду" в качестве секунды координации, или информация, указывающая, следует ли применять "одну секунду", хранится в области 2744 применения секунды координации. Информация идентификации для идентифицирования модуля 200 передачи, который сгенерировал сигнал IMES-TAS, хранится в ID 2745 передатчика.
[0153] В отношении информации, хранящейся в формате 270 сообщения, показанном на фиг. 17, следует также ссылаться на описание формата сообщения, показанного на фиг. 12, 14 и 15, описанных выше.
[0154] Со ссылкой на фиг. 18, слова 275, 276, 277 и 278 формата 270 сообщения обеспечивают, каждое, область для передачи TOTP. Как будет описано ниже, слова 275, 276, 277 и 278 разрешают передачу TOTP из шестидесяти четырех битов в целом. Путем последовательной передачи форматов сообщения тех же, что и слова 275, 276, 277 и 278, может быть передан TOTP из 128 битов.
[0155] Пятое слово 275 включает в себя область 2751 счетчика, область 2752 управления, область 2753 TOTP и область 2747 бита четности. Управляющий код, который представляет процедуру, необходимую для обработки аутентификации с использованием TOTP, сохранен в области 2752 управления. Шесть битов данных, которые составляют TOTP, сохранены в области 2753 TOTP.
[0156] Шестое слово 276 включает в себя область 2761 счетчика, область 2762 страницы сообщения, область 2763 TOTP и область 2764 бита четности. Семнадцать битов данных, которые составляют TOTP, сохранены в области 2763 TOTP.
[0157] Седьмое слово 277 включает в себя область 2771 счетчика, область 2772 TOTP и область 2773 бита четности. Двадцать один бит данных, которые составляют TOTP, хранятся в области 2772 TOTP. Восьмое слово 278 включает в себя область 2781 счетчика, область 2782 TOTP и область 2783 бита четности аналогично седьмому слову 277.
[0158] (e5: Формат сообщения: пример сигнала IMES-TAS (No. 2))
Теперь будет описан другой пример формата сообщения сигнала IMES-TAS, исходящего из передатчика 220 S3. Вместо формата сообщения на основе IMES, определенного на фиг. 16-18, может вводиться формат сообщения, как показано ниже.
[0159] Фиг. 19 представляет собой диаграмму, показывающую еще один другой пример типа сообщения (MT) сигнала, передаваемого из передатчика 220 S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 19, в дополнение к четырем типам сообщения, определенным как известные сигналы IMES, два типа форматов 250A и 270A сообщения могут быть приняты как сигналы IMES-TAS. Сообщение, показанное на фиг. 19, представлено в качестве примера, и может использоваться любой формат сообщения в случае, если оно включает в себя информацию, необходимую для временной синхронизации.
[0160] Формат 250A сообщения (MT6) и формат 270A сообщения (MT7) сигналов IMES-TAS, показанные на фиг. 19, расширены для обеспечения возможности передавать больше информации, в то время как они поддерживают совместимость с существующим форматом сообщения, путем введения принципа "страницы".
[0161] Фиг. 20 представляет собой диаграмму, показывающую один пример структуры кадра формата 270A сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Формат 270A сообщения может включать в себя переменное число страниц в зависимости от применения. В дополнение к примеру, включающему в себя только формат сообщения (четыре слова/для одной страницы), показанный на фиг. 20, может также быть принята конфигурация формата сообщения, показанного на фиг. 20, и формата сообщения, показанного на фиг. 18, описанной выше, как комбинируемых (восемь слов в целом/для двух страниц). Конфигурация формата сообщения (четыре слова), показанного на фиг. 20 как повторно комбинируемого (четыре слова × число страниц в целом), также может быть принята. Длина (число слов/число страниц) такого формата сообщения может быть переменным в зависимости от применения.
[0162] Формат 270A сообщения, показанный на фиг. 20, представляет собой формат, совместимый с сообщением GPS Nav. Когда приемник 320 S3 адаптирован к GPS, он включает в себя декодер сообщений, сконфигурированный, чтобы обрабатывать формат 270A сообщения. Поэтому, христианский год, месяц, день, час, минута и секунда могут быть получены как информация времени без модифицирования декодера сообщений.
[0163] Конкретно, формат 270A сообщения составлен из по меньшей мере четырех слов 271A, 272A, 273A и 274A. Каждое из слов 271A, 272A, 273A и 274A составлено из тридцати битов.
[0164] Первое слово 271A включает в себя область 2711 преамбулы, область 2712 типа сообщения, в которой хранится информация для указания типа сообщения, телеметрическую область 2713, в которой хранится телеметрическая информация, и область 2714 бита четности.
[0165] Второе слово 272A включает в себя область 2721 счетчика, в которой хранится число подсчитанных сообщений, область 2726 страницы сообщения, область 2723 секунды координации, область 2727 недели IMES, в которой хранится (хранятся) неделя(и), прошедшая с опорного дня (например, 6 января 1980), и область 2728 DPC.
[0166] Третье слово 273A включает в себя область 2731 счетчика, область 2736 сброса (ролловера) EOW, область 2732 TOW, область 2733 LAS, область 2737 LTF и область 2735 бита четности.
[0167] Четвертое слово 274A включает в себя область 2741 счетчика, область 2748 секунды применения секунды координации, область 2743 дня применения секунды координации, область 2749 времени задержки, ID 2745 передатчика, область 2746 работоспособности спутника и область 2747 бита четности.
[0168] В отношении информации, хранящейся в формате 270A сообщения, показанном на фиг. 20, можно также ссылаться на описание формата сообщения, показанного на фиг. 12, 14, 15 и 18, описанных выше.
[0169] Фиг. 21 представляет собой диаграмму, показывающую один пример структуры кадра формата 250A сообщения, используемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Формат 250A сообщения, показанный на фиг. 21, используется для обеспечения услуги аутентификации, использующей положение и время. Со ссылкой на фиг. 21, слова 251A, 252A, 253A и 254A формата 250A сообщения используются для хранения данных, подлежащих использованию для услуги аутентификации.
[0170] Конкретно, формат 250A сообщения составлен из четырех слов 251A, 252A, 253A и 254A. Каждое из слов 251A, 252A, 253A и 254A составлено из тридцати битов.
[0171] Первое слово 251A включает в себя область 2511 преамбулы, область 2512 типа сообщения, телеметрическую область 2513 и область 2514 бита четности. Второе слово 252A включает в себя область 2526 счетчика, область 2527 типа сообщения, область 2528 содержимого и область 2525 бита четности. Третье слово 253A включает в себя область 2535 счетчика, область 2536 содержимого и область 2534 бита четности. Четвертое слово 254A включает в себя область 2541 счетчика, область 2542 содержимого и область 2543 бита четности.
[0172] В дополнение к формату 250A сообщения, показанному на фиг. 21, следует также ссылаться на описание формата сообщения, показанного на фиг. 12, 14, 15 и 18, описанных выше.
[0173] (e6: Период передачи/Последовательность передачи)
Теперь будет описан период передачи сигнала IMES-TAS, передаваемого из передатчика 220 S3. В системе временной синхронизации в соответствии с настоящим вариантом осуществления, сообщение, включающее в себя телеметрическое слово, хранящееся в телеметрической области 2513, передается как код тайминга сигнала IMES-TAS каждый предписанный период передачи. Предопределенный фиксированный код используется как телеметрическое слово. Путем использования такого фиксированного кода, оно может функционировать как слово SYNC для синхронизации.
[0174] В качестве примера, передатчик 220 S3 повторно передает сообщение, включающее в себя телеметрическое слово, как код тайминга каждые три секунды, определенные как интервал. В этом случае, например, путем установки битовой скорости сигнала, передаваемого от передатчика 220 S3, в 250 бит/с, может быть реализована передача двадцати пяти слов за три секунды (250 бит/с × 3 секунды ÷ 30 битов).
[0175] В описании ниже, хотя пример, в котором битовая скорость сигнала, передаваемого от передатчика 220 S3, установлена в 250 бит/с, описан в качестве примера, битовая скорость не ограничена этим, и может применяться значение, подходящее для системы. Например, сообщение передается от спутника GPS при 50 бит/с, и битовая скорость сигнала, передаваемого от передатчика 220 S3, может быть установлена в 50 бит/с для адаптации к этой существующей спецификации. В этом случае, поскольку количество данных, которое может передаваться в единицу времени, представляет собой 1/5 (=50/250), период передачи, установленный в предположении 250 бит/с, как описано ниже, должен изменяться только до величины в пять раз дольше. Интервал не ограничен и тремя секундами, и он может изменяться, например, до шести секунд. Оптимальный интервал и битовая скорость могут выбираться подходящим образом согласно требуемым спецификациям или конфигурации системы.
[0176] Фиг. 22 представляет собой диаграмму для иллюстрации одного примера кода тайминга, передаваемого как сигнал IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 22, когда наступает период передачи сигнала IMES-TAS от передатчика 220 S3, начинается передача каждого слова, которое составляет формат 270 сообщения (MT7), показанный на фиг. 17 и 18. Конкретно, слова 271, 272, 273, 274, 275, 276, 277 и 278, которые составляют формат 270 сообщения (MT7), передаются последовательно. Когда передача сообщения MT7 завершена, передается другое сообщение.
[0177] После истечения периода Ts передачи (три секунды в этом примере) с момента передачи первого слова 271, наступает период передачи следующего сигнала IMES-TAS. Поэтому, передача слов 271, 272, 273, 274, 275, 276, 277 и 278, которые составляют формат 270 сообщения (MT7), повторяется. Аналогично после этого, данные в связи с форматом 270 сообщения (MT7) и другим форматом сообщения повторно передаются каждый период Ts передачи. Начальный элемент (первое слово) множества слов, которые составляют кадр сигнала IMES-TAS, ассоциирован с моментом времени начала периода передачи передатчика 220 S3. Поскольку телеметрическое слово с фиксированным значением применяется для сигнала IMES-TAS, начальное слово заголовка зафиксировано на предопределенном значении. Поэтому, все начальное слово может также применяться как слово SYNC или реплика при демодуляции. Приемник 320 S3 достигает временной синхронизации на основе таким образом периодически повторно передаваемого кода тайминга.
[0178] В действительности, поскольку формат 270 сообщения, которое представляет собой сигнал IMES-TAS, составлен из восьми слов, сигнал IMES-TAS занимает восемь слов в сообщении (двадцати пяти словах), которое может передаваться с периодом передачи в три секунды. Сообщение известного сигнала IMES (MT0, MT1, MT3 и MT4, показанных на фиг. 11, 13 и 16) может быть свободно распределено по семнадцати словам иным, чем описанные выше.
[0179] Если удовлетворено только условие передачи сообщения (MT7 или MT6), включающего в себя телеметрическое слово, каждый период Ts передачи без сбоя, тип сообщения, передаваемого в течение периода, отличного от этого периода, может определяться произвольно. Некоторые дополнительные слова могут быть представлены перед таймингом передачи сообщения, включающего в себя телеметрическое слово. В таком случае, требуется заполнение путем вставки сообщения, состоящего из одного слова, такого как MT3.
[0180] Передатчик 220 S3 передает сигнал IMES-TAS с периодом (три секунды) более долгим, чем период (одна секунда) тайминга (1-PPS), выведенным из демодулятора 210 S2. Таким образом, путем расширения периода передачи сигнала IMES-TAS, сигнал IMES может также передаваться в течение свободного времени, и способ предоставления информации на базовую станцию 300 может быть различным. А именно, передатчик 220 S3 может также передавать радиосигнал (сигнал IMES), заменяющий радиосигнал из GNSS (сигнал GNSS), пока сигнал IMES-TAS не передается.
[0181] Фиг. 23 представляет собой диаграмму для иллюстрации одного примера сообщения, передаваемого от передатчика 220 S3 в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Как показано на фиг. 23, можно видеть, что восемь слов, которые составляют формат 270 сообщения, передаются без сбоя каждый период Ts передачи (три секунды в этом примере). Любое сообщение передается в течение периода, отличного от этого периода.
[0182] Как описано выше, поскольку сигнал IMES-TAS, передаваемый от передатчика 220 S3, имеет обратную совместимость с сигналом GNSS и сигналом IMES, могут выполняться одновременные операции. Конкретно, приемник 320 S3 может принимать и декодировать сигнал GNSS, и он может также принимать и декодировать сигнал IMES и сигнал IMES-TAS.
[0183] Покрытие передатчиком 220 S3 (расстояние между передатчиком 220 S3 и приемником 320 S3) предполагается равным от нескольких метров до более чем десяти метров, и время задержки, требуемое для передачи сигнала IMES-TAS, приблизительно представляет собой 33 наносекунды на десять метров. Поэтому, время задержки, связанное с передачей сигнала IMES-TAS, является пренебрежимо малым с точки зрения системных спецификаций системы временной синхронизации в соответствии с настоящим вариантом осуществления.
[0184] Хотя фиг. 23, описанная выше, показывает пример передачи формата 270 сообщения, которое представляет собой сигнал IMES-TAS с периодом в три секунды, может вводиться более долгий период передачи. Например, предполагается, что передатчик 220 S3 повторно передает сообщение, включающее в себя телеметрическое слово (сообщение согласно формату 250 сообщения), как код тайминга каждые шесть секунд, определенные как интервал. В этом случае, например, когда битовая скорость сигнала, передаваемого от передатчика 220 S3, установлена в 250 бит/с, может быть осуществлена передача пятидесяти слов за шесть секунд (250 бит/с × 6 секунд ÷ 30 битов).
[0185] Фиг. 24 представляет собой диаграмму для иллюстрации другого примера сообщения, передаваемого от передатчика 220 S3 в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Как показано на фиг. 24, можно видеть, что три слова, которые составляют формат 250 сообщения, передаются без сбоя каждый период Ts передачи (шесть секунд в этом примере). Любое сообщение передается в течение периода, отличного от этого периода.
[0186] Как описано выше, поскольку сигнал IMES-TS, передаваемый от передатчика 220 S3, имеет обратную совместимость с сигналом GNSS и сигналом IMES, могут выполняться одновременные операции. Конкретно, приемник 320 S3 может принимать и декодировать сигнал GNSS и он может также принимать и декодировать сигнал IMES и сигнал IMES-TS.
[0187] (e7: Процедура обработки при генерации/передаче сигнала IMES-TAS)
Теперь будет описан один пример процедуры обработки, связанной с генерацией и передачей сигнала IMES-TAS в передатчике 220 S3.
[0188] Фиг. 25 представляет собой блок-схему последовательности операций, показывающую процедуру обработки при генерации и передаче сигнала IMES-TAS от передатчика 220 S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Каждый этап, показанный на фиг. 25, в основном выполняется блоком 221 цифровой обработки передатчика 220 S3.
[0189] Со ссылкой на фиг. 25, передатчик 220 S3 определяет, завершена ли или нет подготовка для генерации и передачи сигнала IMES-TAS (этап S200). То, завершена ли или нет подготовка для передачи, может быть определено на основе того, были или нет демодулированные данные и сигнал тайминга успешно приняты от демодулятора 210 S2. Если подготовка для генерации и передачи сигнала IMES-TAS не была завершена (НЕТ на этапе S200), обработка на этапе S200 повторяется.
[0190] Если подготовка для генерации и передачи сигнала IMES-TAS была завершена (ДА на этапе S200), передатчик 220 S3 ожидает приема следующего сигнала тайминга от демодулятора 210 S2 (этап S202). Когда передатчик 220 S3 принял следующий сигнал тайминга от демодулятора 210 S2, передатчик 220 S3 генерирует и передает первое слово, которое составляет формат 270 сообщения (или формат 250 или 260 сообщения) сигнала IMES-TAS на основе демодулированных данных от демодулятора 210 S2 в это время (этап S204). А именно, генерируется и передается сообщение MT7 или MT6. По порядку, передатчик 220 S3 генерирует последовательные слова, которые составляют формат 270 сообщения (или формат 250 или 260 сообщения) сигнала IMES-TAS на основе тех же самых демодулированных данных от демодулятора 210 S2 и последовательно передает слова (этап S206).
[0191] Последовательно, передатчик 220 S3 определяет, принял он или нет сигнал тайминга от демодулятора 210 S2 (этап S208). Если передатчик 220 S3 принял сигнал тайминга от демодулятора 210 S2 (ДА на этапе S208), он определяет, достигло или нет совокупное число раз приема сигнала тайминга после непосредственно предшествующей передачи сигнала IMES-TAS числа, соответствующего периоду Ts передачи (этап S210). Если период Ts передачи был установлен в три секунды, то определяется, является ли или нет прием сигнала тайминга третьим разом после непосредственно предшествующей передачи сигнала IMES-TAS.
[0192] Когда совокупное число раз приема сигнала тайминга после непосредственно предшествующей передачи сигнала IMES-TAS достигло числа, соответствующего периоду Ts передачи (ДА на этапе S210), обработка на этапе S204 и последующих этапах повторяется.
[0193] Напротив, если сигнал тайминга не был принят от демодулятора 210 S2 (НЕТ на этапе S208) или если совокупное число раз приема сигнала тайминга после непосредственно предшествующей передачи сигнала IMES-TAS не достигло числа, соответствующего периоду Ts передачи (НЕТ на этапе S210), передатчик 220 S3 генерирует и передает сигнал IMES по предопределенному правилу (этап S212). А именно, генерируется и передается сообщение любого из MT0, MT1, MT3 и MT4. Обработка на этапе S208 и последовательных этапах затем повторяется.
[0194] Сигнал IMES-TAS передается от передатчика 220 S3 на приемник 320 S3 посредством процедуры обработки, как изложено выше.
[0195] <F. S3 Приемник 320 базовой станции 300>
Теперь будет описана обработка для приема и демодуляции сигнала IMES-TAS в приемнике 320 S3 базовой станции 300.
[0196] Фиг. 26 представляет собой блок-схему, показывающую примерную конфигурацию схемы приемника 320 S3, включенного в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 26, приемник 320 S3 включает в себя множество канальных блоков 321, секцию 322 обработки навигации, секцию 323 управления выбором, секцию 324 обнаружения синхронизации, делители 325 и 327 частоты и секцию 326 контура стабилизации.
[0197] Каждый из множества канальных блоков 321 демодулирует сигнал приема (RF сигнал) и выводит сообщение, включенное в него. Множество канальных блоков 321 демодулируют сигналы приема и выводят сообщения параллельно, и секция 323 управления выбором избирательно обеспечивает выводы из канальных блоков 321 на последующие каскады.
[0198] Конкретно, каждый из канальных блоков 321 включает в себя корреляторы 3211 и 3212, секцию 3213 извлечения сообщения, секцию 3214 генерации кода грубого обнаружения/доступа (C/A), секцию 3215 операции свертки и схему 3216 интеграции.
[0199] Коррелятор 3211 вычисляет корреляцию между сигналом приема и кодом C/A, который представляет собой код расширения, выведенный из секции 3214 генерации кода C/A.
[0200] Секция 3213 извлечения сообщения извлекает сообщение (кадр), включенное в вывод из коррелятора 3211. Секция 3213 извлечения сообщения выводит битовый поток, представляющий извлеченное сообщение. Одновременно, секция 3213 извлечения сообщения координирует тайминг обнаружения синхронизации в канальном блоке 321 путем регулирования фазы тактового сигнала (Clock), генерируемого под контурным управлением.
[0201] Схема 3216 интеграции синхронизирует фазу в соответствии с тактовым сигналом из секции 3213 извлечения сообщения и предоставляет вывод на секцию 3215 операции свертки. Секция 3215 операции свертки выполняет операцию свертки между сигналом приема и сигналом синхронизации из схемы 3216 интеграции и выводит результат на коррелятор 3212. Коррелятор 3212 вычисляет корреляцию между результатом операции свертки из секции 3215 операции свертки и кодом C/A, выведенным из секции 3214 генерации кода C/A. А именно, обработка когерентной интеграции кода C/A выполняется с использованием коррелятора 3212 и секции 3215 операции свертки. Вывод из коррелятора 3212 подается на секцию 3213 извлечения сообщения. Секция 3213 извлечения сообщения регулирует фазу тактового сигнала на основе выводов из коррелятора 3211 и коррелятора 3212. При таком контурном управлении, сообщение, включенное в сигнал приема, может быть обнаружено с высокой точностью.
[0202] Число раз контурной обработки (обработки операции свертки) сообщения схемой 3216 интеграции может быть разным в зависимости от типа сообщения. Например, обработка операции свертки может выполняться 120 раз для сигнала IMES-TAS (MT6 и MT7), обработка операции свертки может выполняться четыре раза для сигнала IMES (MT0, MT1, MT3 и MT4), и обработка операции свертки может выполняться двадцать раз для сигнала GNSS. Обработка операции свертки сигнала IMES-TAS будет описана ниже.
[0203] Когда сообщение, включенное в сигнал GNSS или сигнал IMES, выводится из любого канального блока 321, секция 322 обработки навигации выполняет операцию PVT на этом сообщении. Секция 322 обработки навигации выводит положение (положение GNSS), время (время GNSS), сигнал тайминга (GNSS 1 PPS) и данные IMES (включая данные аутентификации), являющиеся результатом операции PVT.
[0204] Секция 323 управления выбором обнаруживает сообщение, выведенное в результате ввода сигнала IMES-TAS в канальный блок 321, и выводит обнаруженное сообщение на секцию 324 обнаружения синхронизации и секцию 326 контура стабилизации.
[0205] Секция 324 обнаружения синхронизации обнаруживает сообщение, включающее в себя периодически передаваемое телеметрическое слово, и выводит сообщение как сигнал тайминга для сигнала IMES-TAS. Поскольку сообщение, включающее в себя телеметрическое слово, передается с периодом в три секунды как описано выше, секция 324 обнаружения синхронизации выводит один импульсный сигнал каждые три секунды (1 импульс IMES-TAS/3 секунды).
[0206] Секция 324 обнаружения синхронизации выводит тайминг каждого введенного бита как тактовый сигнал (CLK). Когда битовая скорость сигнала, передаваемого от передатчика 220 S3, установлена в 250 бит/с, как описано выше, секция 324 обнаружения синхронизации выводит тактовый сигнал с частотой 250 Гц. Делитель 325 частоты служит в качестве счетчика и выводит один импульс для 250 тактовых сигналов. А именно, сигнал тайминга, выведенный из делителя 325 частоты (IMES-TAS 1 PPS (реальный)) соответствует 1-PPS сигналу. Когда битовая скорость сигнала, передаваемого от передатчика 220 S3, установлена в 50 бит/с, должен быть только принят делитель частоты, который выводит один импульс для пятидесяти тактовых сигналов.
[0207] Секция 326 контура стабилизации выводит тактовый сигнал (тактовый сигнал IMES-TAS/GNSS (стабильный)) для сигнала IMES-TAS и сигнала GNSS путем отслеживания фазы с использованием контура фазовой автоподстройки (PLL), включающего в себя локальный осциллятор, при приеме тактового сигнала от секции 3213 извлечения сообщения и битовой строки из секции 322 обработки навигации. Выведенный тактовый сигнал является более стабилизированным с помощью контура PLL, обеспеченного секцией 326 контура стабилизации.
[0208] Аналогично делителю 325 частоты, делитель 327 частоты служит в качестве счетчика и выводит один импульс для 250 тактовых сигналов. А именно, сигнал тайминга, выведенный из делителя 327 частоты (IMES-TAS 1 PPS (стабильный)), становится более стабильным сигналом, соответствующим 1-PPS сигналу.
[0209] Секция 326 контура стабилизации и делитель 327 частоты являются опциональными, и они обеспечиваются надлежащим образом в зависимости от точности во временной синхронизации, требуемой в радиопередатчике и приемнике 310 в базовой станции 300.
[0210] Как изложено выше, приемник 320 S3 функционирует как приемник, сконфигурированный, чтобы демодулировать сигнал IMES-TAS от передатчика 220 S3 и чтобы получать сигнал тайминга (1 PPS) и информацию времени, соответствующую таймингу, указанному сигналом тайминга. Когда сигнал IMES-TAS MT7 принят, могут быть получены совместимые с сообщением GPS Nav GPS-неделя и TOW (см. фиг. 17). Когда сигнал IMES-TAS MT8 принят, христианский год, месяц, день, час, минута и секунда могут быть непосредственно получены (см. фиг. 18).
[0211] Сигнал IMES-TAS (MT7 или MT8) повторно передается каждый период Ts передачи (три секунды в этом примере). В сообщении, включающем в себя телеметрическое слово (первое слово 271, показанное на фиг. 22, или первое слово 271, показанное на фиг. 23), все из тридцати битов от области преамбулы до области бита четности установлены в фиксированные значения. Поэтому, в результате обработки когерентной интеграции кода C/A коррелятором 3212, может быть получено более высокое отношение несущей к шуму (C/N). Следовательно, точность в синхронизации может быть улучшена.
[0212] Фиг. 27 представляет собой диаграмму для иллюстрации обработки для приема сообщения, включающего в себя телеметрическое слово, в приемнике 320 S3, включенном в систему временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 27, приемник 320 S3 может определить, что увеличение начального бита сообщения (слово 251 или слово 261), включающего в себя телеметрическое слово, представляет собой целое кратное периода Ts передачи (три секунды в этом примере). Тогда, путем приема двух сообщений (слов 252 и 253 или слов 262 и 263), переданных вслед за сообщением, включающим в себя телеметрическое слово, вся необходимая информация о времени может быть получена.
[0213] Например, предполагается, что приемник 320 S3 принял MT7 как сигнал IMES-TAS, и сигнал был декодирован для указания времени "десять двадцать три и тридцать секунд 30 июня 2016". После этого, когда новое MT7 принято спустя период Ts передачи (три секунды), время приема начального бита кадра вновь принятого MT7 может интерпретироваться как "десять двадцать три и тридцать три секунды 30 июня 2016". Такая обработка повторяется каждый период Ts передачи (три секунды).
[0214] Поскольку битовая скорость сигнала, передаваемого от передатчика 220 S3, была установлена в 250 бит/с, путем обнаружения 250 отсчетов (один отсчет на один бит) при помощи счетчика после приема сообщения, включающего в себя телеметрическое слово, может быть выведен 1-PPS сигнал как сигнал тайминга. А именно, секция 324 обнаружения синхронизации и делитель 325 частоты, показанные на фиг. 26, воспроизводят 1-PPS сигнал на основе сигнала IMES-TAS, передаваемого от передатчика 220 S3. Поскольку модулированный сигнал на 250 бит/с, передаваемый от передатчика 220 S3, постоянно поддерживает точность, необходимую для временной синхронизации, 1-PPS сигнал, выведенный из секции 324 обнаружения синхронизации и делителя 325 частоты, показанных на фиг. 26, является достаточно точным в практическом использовании, если не требуется особая стабильность.
[0215] Когда битовая скорость сигнала, передаваемого от передатчика 220 S3, установлена в 50 бит/с, путем восприятия синхронизации с затраченным временным периодом в пять раз дольше, может быть достигнута высокая точность, как в примере битовой скорости 250 бит/с.
[0216] Когда требуется особая стабильность, используются секция 326 контура стабилизации и делитель 327 частоты, показанные на фиг. 26. Секция 326 контура стабилизации извлекает более точный сигнал и уменьшает фазовый шум сигнала тайминга путем улучшения отношения C/N посредством выполнения обработки интеграции с использованием телеметрического слова и выполнения обработки корреляции. Секция 326 контура стабилизации не просто отсчитывает бит, который составляет сообщение, а включает в себя механизм для синхронизации фазы с телеметрическим словом с использованием PLL. Более того, осциллятор с высокой точностью и стабильностью, такой как термостатированный кварцевый осциллятор (OCXO) или кварцевый осциллятор с температурной компенсацией (TCXO), применяется для секции 326 контура стабилизации, чтобы установить стабильный контур также для относительно длинного периода передачи в три секунды.
[0217] MT7 и MT8, используемые как сигналы IMES-TAS, таким образом, являются масштабируемыми, и они способны также в достаточной степени удовлетворять требованиям более высокой стабильности.
[0218] Приемник 320 S3 может одновременно принимать сигнал GNSS и сигнал IMES-TAS. В среде, где сигнал IMES-TAS может быть принят, однако, надежность информации времени и сигнала тайминга, полученных из сигнала GNSS, может быть очень низкой. Это объясняется тем, что передатчик 220 S3 в общем обеспечен в среде, где сигнал GNSS не принимается успешно, или среде, значительно низкой по надежности принимаемого сигнала GNSS (например, в помещении).
[0219] С учетом таких причин, когда сигнал GNSS и сигнал IMES-TAS принимаются одновременно, предпочтительно не использовать информацию времени и сигнал тайминга, полученные из сигнала GNSS. Альтернативно, когда принимается сигнал IMES-TAS, может быть принята конфигурация, которая не принимает какой-либо сигнал GNSS. Кроме того альтернативно, прием сигнала GNSS может быть установлен заранее в приемнике 320 S3. Например, установка двоичного декодера (BD) для MT3 в "0" в приемнике 320 S3 указывает, что приемник S3 представляет собой внутренний приемник, то есть, указывает его низкую надежность в глобальной навигации на основе сигнала GNSS или неспособность принимать сигнал GNSS. Посредством не разрешения обработки сигнала GNSS, потребление энергии в приемнике 320 S3 может быть уменьшено, и может быть получен стабильный сигнал синхронизации.
[0220] Когда приемник 320 S3 принимает сигналы IMES-TAS, передаваемые от множества передатчиков 220 S3, обеспеченных вблизи друг друга, может быть выбран сигнал IMES-TAS, принятый в самом раннем тайминге. Поскольку эта разница в тайминге равна порядка только наносекунды, более ранний в тайминге сигнал предпочтительно обнаруживается с использованием коррелятора или тому подобного.
[0221] Теперь будет описан подход для улучшения отношения C/N в приемнике 320 S3.
Фиг. 28 представляет собой диаграмму для иллюстрации конфигурации сообщения, принятой в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Фиг. 28 показывает отношение между кодом C/A и сигналом IMES-TAS (формат 270 сообщения MT7). Сигнал IMES-TAS выражает один бит сообщения путем повторения четыре раза кода C/A, представляющего код расширения. Обычный сигнал GNSS выражает один бит сообщения путем повторения кода C/A двадцать раз.
[0222] Поэтому, когда обычный приемник GNSS захватывает код C/A, он образует контур отслеживания сигнала и выполняет обработку когерентной интеграции (обработку операции свертки) на сигнале приема с таймингом кода C/A. Отношение C/N, таким образом, улучшается, и стабильность контура отслеживания сигнала улучшается.
[0223] Напротив, сигнал IMES-TAS, используемый в системе временной синхронизации в соответствии с настоящим вариантом осуществления, выражает один бит путем повторения кода C/A четыре раза. Поэтому, операция свертки, аналогичная операции свертки в обычном приемнике GNSS, имеет низкую эффективность в улучшении отношения C/N.
[0224] Затем, для сигнала IMES-TAS, подготавливается сообщение для отслеживания сигнала и выполнения обработки интеграции. Конкретно, первое слово 271 сигнала IMES-TAS (формат 270 сообщения MT7) может функционировать как слово синхронизации. Поскольку первое слово 271 имеет все тридцать битов, установленные в фиксированные значения, как описано выше, оно может использоваться как реплика аналогично коду C/A в приемнике 320 S3. С использованием такого сообщения, включающего в себя телеметрическое слово, обработка когерентной интеграции (обработка операции свертки) может выполняться 120 раз максимально. А именно, схема, которая выполняет обработку операции свертки множество раз на первом слове, которое составляет сигнал IMES-TAS, установлена в приемнике 320 S3. Рабочие характеристики частоты и тайминга, которые являются основой сигнала IMES-TAS, могут быть улучшены за счет повышения стабильности контура отслеживания сигнала путем улучшения отношения C/N с использованием обработки операции свертки, выполняемой множество раз.
[0225] Как изложено выше, приемник 320 S3 может выводить высокоточную информацию времени и сигнал тайминга путем улучшения отношения C/N с использованием характеристики сигнала IMES-TAS, передаваемого от передатчика 220 S3.
[0226] <G. Генерация и использование кода аутентификации>
Теперь будут описаны генерация и использование кода аутентификации.
[0227] Фиг. 29 представляет собой диаграмму для иллюстрации одного примера информации, включенной в сигнал, передаваемый в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 29, сигнал 103 GNSS, принимаемый опорным модулем 100, обычно включает в себя сигнал 1031 тайминга, тактовый сигнал 1032, информацию 1033 о положении, информацию 1034 времени и информацию 1035 секунды координации.
[0228] Сигнал 1031 тайминга представляет собой, например, информацию для обеспечения сигнала тайминга в синхронизации с GNSS и включает в себя, например, односекундный импульсный сигнал (1-PPS сигнал).
[0229] Тактовый сигнал 1032 представляет собой, например, информацию для обеспечения источника частоты в синхронизации с GNSS и включает в себя, например, импульсный сигнал 10 МГц.
[0230] Информация 1033 о положении представляет собой информацию для обеспечения услуги глобальной навигации и включает в себя, например, информацию широты, долготы, высоты и минимального уровня.
[0231] Информация 1034 времени представляет собой информацию для обеспечения информации времени в синхронизации с GNSS и включает в себя, например, информацию о христианском годе, месяце, дне, часе, минуте и секунде. Аналогично, информация 1035 секунды координации также представляет собой информацию для обеспечения информации времени в синхронизации с GNSS и включает в себя информацию для коррекции секунды координации.
[0232] Сигнал 203 IMES-TAS, передаваемый от передатчика 220 S3 модуля 200 передачи, обычно включает в себя сигнал 2031 тайминга, тактовый сигнал 2032, информацию 2033 о положении, информацию 2034 времени, информацию 2035 секунды координации и код 2036 аутентификации.
[0233] Поскольку сигнал 2031 тайминга, тактовый сигнал 2032, информация 2033 о положении, информация 2034 времени и информация 2035 секунды координации аналогичны соответствующей информации, включенной в сигнал GNSS 103, подробное описание не будет повторяться.
[0234] Код 2036 аутентификации включает в себя, например, значение TOTP как одноразового пароля в зависимости от текущего значения положения и времени.
[0235] Базовая станция 300 или мобильный терминал, который принял сигнал 203 IMES-TAS от передатчика 220 S3 модуля 200 передачи, может выполнить также обработку аутентификации для обеспечения целостности или аутентичности положения и времени в дополнение к положению и времени путем приема сигнала 203 IMES-TAS.
[0236] Фиг. 30 представляет собой диаграмму для иллюстрации одного примера способа генерирования кода аутентификации в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 30, передатчик 220 S3 модуля 200 передачи включает в себя кодер 280 для генерирования TOTP и генератор 282 IMES-TAS, который генерирует сигнал IMES-TAS (сообщение), включающий в себя TOTP, генерируемый кодером 280.
[0237] Кодер 280 генерирует TOTP, включающий в себя предписанное число битов, путем выполнения предписанной необратимой операции на информации времени, полученной демодуляцией RF сигнала передачи, и некоторый код начального числа. Обычно, TOTP может включать в себя 64 бита или 128 битов. Естественно, может быть принят TOTP, составленный из большего числа битов, или TOTP, составленный из меньшего числа битов.
[0238] Обычно, криптографическая хеш-функция предпочтительно применяется для необратимой операции для генерирования TOTP. Функция серии алгоритма безопасного хеширования (SHA) может применяться в качестве такой криптографической хеш-функции. Дайджест сообщения, выведенный из такой криптографической хеш-функции, соответствует TOTP. Альтернативно, может быть принят TOTP, генерируемый согласно алгоритму генерации, определенному как RFC6238.
[0239] В кодере 280, информация времени и секретный ключ, установленный для каждого модуля 200 передачи, обеспечены для криптографической хеш-функции. TOTP, который представляет собой сообщение предписанной длины, таким образом, вычисляется согласно криптографической хеш-функции с секретным ключом и информацией времени, обеспечиваемой в качестве ввода.
[0240] Секретный ключ используется как код начального числа для генерирования дайджеста сообщения (TOTP). Когда принята такая конфигурация, предпочтительно используются аппаратные средства, высокоустойчивые к несанкционированным вмешательствам, таким как атака на опорный модуль 100. Например, предпочтительно принимается конфигурация, реализующая генерацию пары ключей или вычисление дайджеста сообщения в одном чипе. Модуль доверенной платформы (TPM) известен в качестве одного примера такой конфигурации. TPM также проектируется так, что, при попытке физического реверсивного проектирования, встроенная память разрушается и значение, хранящееся в ней, не считывается. Путем использования таких высокоустойчивых к несанкционированным вмешательствам аппаратных средств может поддерживаться безопасность против атак по сети или физического реверсивного проектирования.
[0241] Альтернативно, вместо установления секретного ключа заранее в модуле 200 передачи, может использоваться секретный ключ, генерируемый сервером 108 аутентификации. Сервер 108 аутентификации произвольно генерирует секретный ключ. Секретный ключ, сгенерированный сервером 108 аутентификации, может быть включен в RF сигнал передачи, передаваемый от опорного модуля 100 на модуль 200 передачи. Поскольку нет необходимости удерживать статический секретный ключ в самом опорном модуле 100 за счет использования секретного ключа из сервера 108 аутентификации, уровень безопасности может быть повышен.
[0242] Генератор 282 IMES-TAS генерирует сигнал IMES-TAS, как описано выше, из TOTP, сгенерированного кодером 280, в дополнение к информации о положении, информации времени, сообщению IMES и информации идентификации.
[0243] Путем установления конфигурации, как показано на фиг. 30, на опорном модуле 100, может транслироваться сигнал IMES-TAS, включающий в себя TOTP.
[0244] <H. Формат вывода демодулированных данных>
Информация, полученная посредством приема сигнала IMES-TAS, передаваемого от модуля 200 передачи, и декодирования принятого сигнала IMES-TAS может выводиться, например, в соответствии с форматом NMEA, используемым при выводе данных приема из общего модуля приема GPS.
[0245] Фиг. 31-40 представляют собой, каждая, диаграмму, показывающую один пример формата вывода данных сигнала IMES-TAS в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
[0246] Фиг. 31 показывает один пример формата (IMTCS) для выведения информации для приема услуги положения и времени. В формате, показанном на фиг. 31, хранится основная информация, включающая в себя текущее время.
[0247] Фиг. 32 показывает один пример формата (IMTCR) для выведения более примитивной информации для приема услуги положения и времени. В формате, показанном на фиг. 32, информация, включенная в принятый сигнал IMES-TAS, хранится как таковая.
[0248] Фиг. 33 показывает один пример формата (IMASC) для выведения информации для приема услуги с использованием кода аутентификации. В формате, показанном на фиг. 33, в дополнение к информации о положении, хранится код аутентификации (TOTP), ассоциированный с информацией о положении.
[0249] Фиг. 34 показывает один пример формата (IMMSG) для выведения информации об обработке для приема сигнала IMES-TAS. В формате, показанном на фиг. 34, хранится тип принятого сигнала IMES-TAS или сам принятый битовый поток.
[0250] Фиг. 35 показывает один пример формата (IMIPI) для выведения только информации о положении. В формате, показанном на фиг. 35, хранится информация о текущем положении, включенная в сигнал IMES-TAS, принятый от конкретного модуля 200 передачи.
[0251] Фиг. 36 показывает один пример формата (IMSPI) для выведения синтезированной информации о положении. В формате, показанном на фиг. 36, хранится информация о текущем положении, синтезированная на основе множества элементов информации.
[0252] Фиг. 37 показывает один пример формата (IMSID) для выведения короткого ID, включенного в передаваемое сообщение. В формате, показанном на фиг. 37, хранится информация о коротком ID, полученном из принятого сообщения, и граничном бите.
[0253] Фиг. 38 показывает один пример формата (IMMID) для выведения среднего ID, включенного в передаваемое сообщение. В формате, показанном на фиг. 38, хранится информация о среднем ID, полученном из принятого сообщения, и граничном бите.
[0254] Фиг. 39 показывает один пример формата (IMDSA) при передаче сообщения о бедствии, транслируемого посредством QZSS с использованием системы временной синхронизации в соответствии с настоящим вариантом осуществления. В формате, показанном на фиг. 39, хранится информация для выдачи сообщения о бедствии.
[0255] Фиг. 40 показывает один пример формата (GPGGA) для выведения содержимого транслируемого сигнала IMES-TAS. На фиг. 40, для отладки или тому подобного, выводится само содержимое, содержащееся в сигнале IMES-TAS.
[0256] Форматы, показанные на фиг. 31-40, являются только примерами и может быть принят любой формат NMEA.
[0257] <I. Функция коррекции задержки и измерение и установка времени задержки>
Теперь будет описана обработка для измерения и установки времени задержки для выполнения функции коррекции задержки в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
[0258] Фиг. 41 представляет собой диаграмму для иллюстрации задержки передачи, вызываемой в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 41, например, предполагается, что сообщение передается от модулятора 120 S2 опорного модуля 100 в определенное время T1. Предполагается, что то же самое сообщение принимается демодулятором 210 S2 модуля 200 передачи во время T2. Разность между временем T1 и временем T2 соответствует времени задержки. В частности, в системе 2 мобильной связи, показанной на фиг. 5 и 6, путь передачи от модулятора 120 S2 опорного модуля 100 на демодулятор 210 S2 модуля 200 передачи является относительно длинным. Поэтому, время задержки не является пренебрежимо малым и должно быть скорректировано. Чтобы такая функция коррекции задержки была выполнена эффективно, величина коррекции (время коррекции) для задержки передачи должна быть установлена для каждого демодулятора 210 S2.
[0259] Чтобы облегчить измерение и установку такой задержки времени, может использоваться устройство калибровки тайминга.
[0260] Фиг. 42 представляет собой диаграмму для иллюстрации применения устройства 500 калибровки тайминга в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 42, устройство калибровки тайминга соединено с демодулятором 210 S2 модуля 200 передачи после того, как система временной синхронизации сконфигурирована в соответствии с настоящим вариантом осуществления, так что время задержки автоматически измеряется, и величина коррекции (время коррекции) для задержки передачи может быть установлена для демодулятора 210 S2 на основе результата измерения. Устройство 500 калибровки тайминга обычно измеряет время задержки и устанавливает время коррекции.
[0261] Фиг. 43 представляет собой блок-схему, показывающую примерную конфигурацию схемы устройства 500 калибровки тайминга, обеспеченного в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 43, устройство 500 калибровки тайминга измеряет время задержки путем сравнения внутренне генерируемого сигнала тайминга (1-PPS сигнала) с сигналом тайминга (1-PPS сигналом), воспроизводимым из RF сигнала передачи демодулятором 210 S2.
[0262] Конкретно, устройство 500 калибровки тайминга получает внутренне генерируемый сигнал тайминга (1-PPS), по существу идентичный сигналу тайминга (1-PPS), полученному приемником 110 GNSS опорного модуля 100, и определяет величину коррекции (время коррекции) для задержки передачи путем измерения отставания по времени между внутренне генерируемым сигналом тайминга (1-PPS) и сигналом тайминга (1-PPS), выведенным из демодулятора 210 S2.
[0263] Конкретно, устройство 500 калибровки тайминга включает в себя CPU 502, детектор 504 отставания по времени, секцию 506 генерации опорного тайминга, смеситель 510, фильтр верхних частот 512, аналого-цифровой преобразователь 514, дисплей 516 и батарею 518.
[0264] CPU 502 обеспечивает инструкцию на каждую секцию и устанавливает время коррекции для демодулятора 210 S2 на основе результата обработки. CPU 502 может также установить разницу в связи с волнами несущей, различными значениями установки и информацией статуса для демодулятора 210 S2.
[0265] Детектор 504 отставания по времени обнаруживает время задержки (разность фаз) между сигналом тайминга (1-PPS) из секции 506 генерации опорного тайминга и сигналом тайминга (1-PPS) из демодулятора 210 S2 в ответ на команду CPU 502 и выводит обнаруженное время задержки на CPU 502. Это время задержки вводится как величина коррекции, подлежащая установке для демодулятора 210 S2.
[0266] Секция 506 генерации опорного тайминга включает в себя однокристальные атомные часы (CSAC) и выводит высокоточный опорный сигнал тайминга с информацией, полученной путем декодирования сигнала GNSS, принятого через антенну 508, определенного в качестве опоры. Конкретно, секция 506 генерации опорного тайминга выводит сигнал тайминга (1-PPS сигнал) и RF сигнал (10 МГц), соответствующий волнам несущей.
[0267] Смеситель 510 умножает RF сигнал из секции 506 генерации опорного тайминга и волны несущей от демодулятора 210 S2 друг на друга. Результат умножения при помощи смесителя 510 преобразуется в цифровой сигнал аналого-цифровым преобразователем 514 посредством фильтра верхних частот 512. Значение, выведенное из аналого-цифрового преобразователя 514, представляет сдвиг по частоте волн несущей.
[0268] Таким образом, смеситель 510, фильтр верхних частот 512 и аналого-цифровой преобразователь 514 реализуют секцию 509 обнаружения отклонения частоты для обнаружения отклонения частоты. Сигнал, выведенный из секции 509 обнаружения отклонения частоты, подсчитывается CPU 502. Секция 509 обнаружения отклонения частоты может быть реализована с использованием внешнего счетчика.
[0269] Дисплей 516 может показывать измеренное время задержки или время коррекции и состояние вывода сигнала тайминга в секции 506 генерации опорного тайминга, в дополнение к информации о состоянии операций посредством устройства 500 калибровки тайминга (например, осуществляемого измерения или установки).
[0270] Последовательность операций, включая измерение времени задержки и установку времени коррекции устройством 500 калибровки тайминга, может выполняться автоматически. Путем автоматизации такой последовательности операций, необходимое время коррекции может быть установлено в упрощенной процедуре, даже хотя обеспечено большое число модулей 200 передачи (демодулятор 210 S2 и передатчик 220 S3).
[0271] Для выполнения функции коррекции задержки, принятой в системе временной синхронизации в соответствии с настоящим вариантом осуществления, время коррекции должно быть установлено для каждого из демодуляторов 210 S2. С использованием устройства 500 калибровки тайминга, однако, время для таких операций может быть сокращено.
[0272] <J. Функция для автоматической коррекции времени задержки>
Теперь будет описана функция для автоматической коррекции времени задержки в системе временной синхронизации в соответствии с настоящим вариантом осуществления.
[0273] Фиг. 44 представляет собой диаграмму для иллюстрации функции для автоматической коррекции времени задержки в системе временной синхронизации в соответствии с настоящим вариантом осуществления. Со ссылкой на фиг. 44, например, задающий приемопередатчик (TASTRX-M) 520 TAS обеспечен ниже по потоку от головного узла 30 станции вещания CATV, и подчиненный приемопередатчик 530 TAS обеспечен как соединенный с демодулятором 210 S2. Механизм двунаправленной синхронизации сконфигурирован между задающим приемопередатчиком 520 TAS и подчиненным приемопередатчиком 530 TAS. Когда используется сеть CATV, механизм двунаправленной синхронизации может быть сконфигурирован в полосе BS/CS.
[0274] В этом случае, посредством выдачи запроса измерения на TASTRX-SID, включенный в пакет вещания TASTRX-M, измеряется время задержки между задающим приемопередатчиком 520 TAS и подчиненным приемопередатчиком 530 TAS. Посредством установления контура коррекции контура захвата частоты (FLL) с использованием измеренного времени задержки, может быть установлен контур, посредством которого время задержки может автоматически корректироваться. Путем применения результата такого контура коррекции FLL к функции для автоматической коррекции времени задержки демодулятора 210 S2, время коррекции может динамически оптимизироваться даже в среде, в которой состояние пути передачи часто изменяется. Поэтому, временная синхронизация высокой точности может постоянно поддерживаться независимо от условия пути передачи.
[0275] <K. Модификация>
(k1: Генерация и передача RF сигнала передачи)
Конфигурация, в которой RF сигнал передачи, передаваемый от одного опорного модуля 100, принимается множеством модулей 200 передачи, представлена в качестве примера в варианте осуществления, описанном выше. Для усиления избыточности, однако, может быть обеспечено множество опорных модулей 100. В этом случае, множество опорных модулей 100 может передавать RF сигналы передачи на разных частотах (каналах). Модули 200 передачи могут принимать RF сигналы передачи через множество каналов и могут избирательно принимать предопределенный RF сигнал передачи среди доступных для приема RF сигналов передачи.
[0276] Альтернативно, посредством взаимного мониторинга среди множества опорных модулей 100, только любой один опорный модуль 100 может передавать RF сигнал передачи, и другие опорные модули 100 могут поддерживать немедленную замену, в случае сбоя опорного модуля 100, отвечающего за передачу RF сигнала передачи, неисправного модуля.
[0277] Система временной синхронизации в соответствии с настоящим вариантом осуществления передает сигнал тайминга (1 PPS) и информацию времени с использованием RF сигнала передачи. Поэтому, качество пути передачи от опорного модуля 100 на модуль 200 передачи не является очень критичным. Поэтому, может применяться множество путей передачи или любой путь передачи, такой как комбинация коаксиального кабеля и оптического кабеля, или комбинация сети CATV и телефонной линии, и объем применения шире.
[0278] (k2: Передача сигнала от модуля передачи)
Хотя пример с использованием сигнала IMES-TAS на основе сигнала IMES, представляющего смоделированный сигнал, дополняющий сигнал GPS, представлен в качестве примера в описании выше, сигнал, служащий в качестве основы, не ограничен этим. Например, информация, такая как информация о положении, системный тактовый сигнал и информация времени, может беспроводным образом передаваться в соответствии с форматом, совместимым с радиосигналом от глобальной спутниковой навигационной системы, такой как GLONASS, SBAS, спутниковая навигационная система BeiDou и Galileo, отличный от GPS.
[0279] Альтернативно, если схема приема базовой станции 300 является адаптируемой, информация, такая как системный тактовый сигнал и информация времени, может беспроводным образом передаваться с использованием радиосигнала в соответствии с известным или уникальным протоколом. Например, радиосигнал может передаваться более точным способом, в то время как принимается протокол, подобный тому, что называется атомными часами.
[0280] Более того, как будет пояснено в качестве примера ниже, модуль передачи и базовая станция могут быть соединены друг с другом через провод. В этом случае, может использоваться сигнал в любом формате.
[0281] (k3: Первый пример проводного соединения между модулем передачи и базовой станцией)
Фиг. 45 представляет собой схематичную диаграмму, показывающую один пример системы 1A мобильной связи, включающей в себя систему временной синхронизации в соответствии с первой модификацией настоящего варианта осуществления. Фиг. 46 представляет собой схематичную диаграмму, показывающую примерную конфигурацию базовой станции 300A, включенной в систему 1A мобильной связи, показанную на фиг. 45.
[0282] Модули 200A-1, 200A-2, … передачи (которые могут также совместно упоминаться ниже как "модуль 200A передачи") в системе 1A мобильной связи, показанной на фиг. 45, включают в себя, каждый, демодулятор 210 S2, который демодулирует RF сигнал передачи, передаваемый от модулятора 120 S2, и интерфейс 230 передачи для передачи результата демодуляции демодулятором 210 S2 на базовую станцию 300A. Соответственный один из модулей 200A передачи электрически соединен с любой одной из базовых станций 300A-1, 300A-2, … (которые могут также совместно упоминаться ниже как "базовая станция 300A") через линию 232 сигнала.
[0283] Информация времени, сигнал тайминга и различные типы данных, включенные в результат демодуляции демодулятором 210 S2, передаются от модуля 200A передачи на модуль 300A передачи через линию 232 сигнала. Сигнал может передаваться в любой схеме и процедуре. Со ссылкой на фиг. 46, в базовой станции 300A, вместо приемника 320 S3 (см. фиг. 4), организован интерфейс 330 передачи. Конкретно, интерфейс 230 передачи модуля 200A передачи и интерфейс 330 передачи базовой станции 300A являются признаками для передачи необходимой информации через линию 232 сигнала.
[0284] Путем принятия такой конфигурации, базовая станция 300A может быть организована даже в местоположении, где передача радиосигнала, такого как сигнал IMES-TAS, ограничена.
[0285] (k4: Второй пример проводного соединения между модулем передачи и базовой станцией)
Фиг. 47 представляет собой схематичную диаграмму, показывающую один пример системы 1B мобильной связи, включающей в себя систему временной синхронизации в соответствии со второй модификацией настоящего варианта осуществления. Фиг. 48 представляет собой схематичную диаграмму, показывающую примерную конфигурацию базовой станции 300B, включенной в систему 1B мобильной связи, показанную на фиг. 47.
[0286] В системе 1B мобильной связи, показанной на фиг. 47, модули 200B-1, 200B-2, … передачи (которые могут также совместно упоминаться ниже как "модуль 200B передачи") соединены с одной базовой станцией или множеством базовых станций базовых станций 300B-1, 300B-2, … (которые могут также совместно упоминаться ниже как "базовая станция 300B") через сетевой кабель 242. Например, при использовании кабеля в соответствии с Ethernet как сетевого кабеля 242, вид сети может быть сконфигурирован. Когда такая сеть сконфигурирована, множество базовых станций 300B может быть соединено с одним модулем 200B передачи.
[0287] В системе 1B мобильной связи, показанной на фиг. 47, каждый из модулей 200B передачи включает в себя демодулятор 210 S2, который демодулирует RF сигнал передачи, передаваемый от модулятора 120 S2, и задающий тактовый генератор 240, который генерирует опорное время на основе результата демодуляции демодулятором 210 S2. Задающий тактовый генератор 240 представляет собой, например, устройство генерации опорного времени для достижения временной синхронизации с использованием метода PTP, и например, может использоваться задающий тактовый генератор в соответствии с протоколом, определенным в IEEE 1588 (PTP) или IEEE 1588v2 (PTPv2). Со ссылкой на фиг. 48, в базовой станции 300B, подчиненный тактовый генератор 360 предусмотрен вместо приемника 320 S3 (см. Фиг. 4). Подчиненный тактовый генератор 360 находится во временной синхронизации с задающим тактовым генератором 240 посредством сетевого кабеля 242 и обеспечивает информацию синхронизированного времени на радиопередатчик и приемник 310.
[0288] С принятием такой конфигурации, базовая станция 300B может быть организована даже в местоположении, где передача радиосигнала, такого как сигнал IMES-TAS, ограничена. Поскольку множество базовых станций 300B может также быть соединено с одним модулем 200B передачи, организация базовой станции 300B является гибкой.
[0289] (k5: Примерное использование сигнала, передаваемого от модуля передачи)
Хотя пример применения системы временной синхронизации к применению временной синхронизации между базовой станцией 300 и другой базовой станцией 300 проиллюстрирован как типовой пример в описании выше, не подразумевается ограничение этим, и другое устройство может использовать информацию, такую как информация о положении, системный тактовый сигнал и информация времени.
[0290] Фиг. 49 представляет собой схематичную диаграмму, показывающую один пример системы 1C мобильной связи, включающей в себя систему временной синхронизации в соответствии с третьей модификацией настоящего варианта осуществления. В системе 1C мобильной связи, показанной на фиг. 49, хотя мобильный терминал 370, представленный в области соты, обеспеченной любой базовой станцией (базовой станцией 300-2 в примере, показанном на фиг. 49), может получать необходимую информацию от базовой станции 300-2, он может принимать совместно радиосигнал от модуля 200-2 передачи и получать информацию о положении, системный тактовый сигнал и информацию времени, передаваемые по радиосигналу. В условиях, как показано на фиг. 49, мобильный терминал 370 с большой вероятностью неспособен использовать сигнал GNSS. Поэтому, информацию о положении получают через радиосигнал от модуля 200-2 передачи, и пользователь может принять необходимую услугу.
[0291] Различные типы информации, передаваемой по радиосигналу от модуля 200 передачи, могут быть предоставлены также на любое устройство 380 связи. Например, любое устройство 380 связи может получать информацию о положении и информацию времени самого устройства связи через радиосигнал от модуля 200 передачи и предоставлять информацию вместе с другими типами собранной информации на устройство сервера более высокого порядка или тому подобное. С принятием такой конфигурации, информация о положении и информация времени могут собираться снаружи и в помещении просто посредством установки схемы радиопередачи и схемы для приема сигнала GNSS на устройстве 380 связи, и собранная полевая информация может быть предоставлена в ассоциации с такой информацией о положении и информацией времени. Поэтому, экономичным образом могут обеспечиваться различные системы, в которых применяется технология Интернета вещей (IoT).
[0292] (k6: Примерное использование сигнала, передаваемого от модуля передачи)
Фиг. 50 представляет собой схематичную диаграмму, показывающую один пример системы 1D мобильной связи, включающей в себя систему временной синхронизации в соответствии с четвертой модификацией настоящего варианта осуществления. В системе 1D мобильной связи, показанной на фиг. 50, опорный модуль 100D включает в себя модулятор 120 S2D, включающий в себя интерфейс для соединения с сетью, такой как Ethernet, вместо интерфейса для генерирования RF сигнала передачи. Модулятор 120 S2D дополнительно содержит (эталонный) задающий тактовый сигнал согласно протоколу, определенному в IEEE 1588 (PTP) или IEEE 1588v2 (PTPv2).
[0293] Каждый модуль 200D передачи включает в себя демодулятор 210 S2D, включающий в себя интерфейс для соединения с сетью, такой как Ethernet, вместо интерфейса для приема RF сигнала передачи. Демодулятор 210 S2D содержит подчиненный тактовый генератор в соответствии с протоколом, определенным в IEEE 1588 (PTP) или IEEE 1588v2 (PTPv2). Демодулятор 210 S2D координирует время в синхронизации с задающим тактовым генератором, содержащимся в модуляторе 120 S2D.
[0294] Аналогично конфигурации, описанной выше, обеспечивается информация для генерирования сигнала IMES-TAS через сеть от опорного модуля 100D на модуль 200D передачи. Модуль 200D передачи затем предоставляет сигнал IMES-TS или сигнал IMES-TAS на базовую станцию. Сигнал IMES-TS обычно включает в себя положение (Position), время (Clock) и сигнал тайминга (Timing). Сигнал IMES-TAS включает в себя код аутентификации (Authentication Code) в дополнение к информации, включенной в сигнал IMES-TS.
[0295] Путем регулирования такой конфигурации, требования к оборудованию, необходимые для передачи информации от опорного модуля 100D на модуль 200D передачи, могут быть ослаблены, и может дополнительно продвигаться широкое использование системы мобильной связи в соответствии с настоящим вариантом осуществления.
[0296] <L. Преимущество>
В системе временной синхронизации в соответствии с настоящим вариантом осуществления, сигнал тайминга и информация времени, необходимая для временной синхронизации, передаются на демодулятор 210 S2 в виде RF сигнала передачи, и путем использования данных, демодулированных демодулятором 210 S2, передатчик 220 S3 передает сигнал и информацию в виде любого сигнала (обычно, сигнала IMES-TAS, как описано выше) беспроводным способом или проводным способом. С принятием такой формы передачи сигнала, может использоваться уже предусмотренное оборудование, такое как общая антенная система или сеть CATV, а также может использоваться оборудование, с которым терминал в помещении (коннектор для TV разводки) может легко быть соединен. Поэтому, когда большое число микро базовых станций, таких как фемтосоты, обеспечены в помещении, временная синхронизация во всей системе, включающей в себя множество микро базовых станций, может быстро достигаться, в то время как затраты, требуемые для установки, уменьшаются.
[0297] Следует понимать, что вариант осуществления, раскрытый в настоящем документе, является иллюстративным и не ограничивающим в любом отношении. Объем настоящего изобретения определяется терминами формулы изобретения, а не описания, приведенного выше, и предназначен, чтобы включать в себя любые модификации в пределах объема и значений, эквивалентных терминам формулы изобретения.
Список ссылочных позиций
[0298] 1, 1A, 1B, 1C, 2 система мобильной связи; 10 здание; 12 микшерный усилитель; 16 антенная линия; 18 терминал; 20 вводной провод; 30 головной узел; 32 линия передачи; 34 разделитель приема; 100 опорный модуль; 102 антенна GNSS; 103 сигнал GNSS; 104, 360 подчиненный тактовый генератор; 106 приемник; 108 сервер аутентификации; 109 сеть; 110 приемник GNSS; 120 модулятор S2; 121 схема генерации сигнала IF; 122 схема модуляции; 123, 129 фильтр нижних частот; 124, 2141, 2142, 2158 цифро-аналоговый преобразователь; 125, 217 осциллятор несущей; 126 схема повышающего преобразования; 127, 510, 2122, 2146 смеситель; 128, 2121 переменный усилитель; 200, 200A, 200B, 200D модуль передачи; 203 сигнал IMES-TAS; 210 демодулятор S2; 212 схема понижающего преобразования; 214 схема демодуляции; 218 системный осциллятор; 220 передатчик S3; 221 блок цифровой обработки; 222 EEPROM; 223 блок аналоговой обработки; 224, 340, 508 антенна; 225 цифровой интерфейс ввода и вывода; 226 интерфейс тайминга; 227 осциллятор; 228 источник питания; 230, 330 интерфейс передачи; 232 линия сигнала; 240 задающий тактовый генератор; 242 сетевой кабель; 280 кодер; 282 генератор IMES-TAS; 300, 300A, 300B базовая станция; 310 радиопередатчик и приемник; 320 приемник S3; 321 канальный блок; 322 секция обработки навигации; 323 секция управления выбором; 324 секция обнаружения синхронизации; 325, 327, 2154, 2159 делитель частоты; 326 секция контура стабилизации; 350, 400 область соты; 370 мобильный терминал; 380 устройство связи; 500 устройство калибровки тайминга; 502, 2212 CPU; 504 детектор отставания по времени; 506 секция генерации опорного тайминга; 509 секция обнаружения отклонения частоты; 512 фильтр верхних частот; 514 аналого-цифровой преобразователь; 516 дисплей; 518 батарея; 520 задающий приемопередатчик; 530 подчиненный приемопередатчик; 1031, 2031 сигнал тайминга; 1032, 2032 тактовый сигнал; 1033, 2033 информация о положении; 1034, 2034 информация времени; 1035, 2035 информация секунды координации; 2036 код аутентификации; 2123, 2125, 2160 усилитель; 2124, 2126, 2144, 2145 фильтр нижних частот; 2143 фазовращатель; 2147 секция битовой синхронизации; 2148 секция восприятия SYNC; 2149 секция извлечения данных; 2150 секция параллельного преобразования; 2151 секция хранения величин коррекции задержки; 2152 секция регулировки синхронизации; 2153 секция сравнения фазы; 2156, 2157 контурный фильтр; 2214 RAM; 3211, 3212 коррелятор; 3213 секция извлечения сообщения; 3214 секция генерации кода; 3215 секция операции свертки; 3216 схема интеграции.
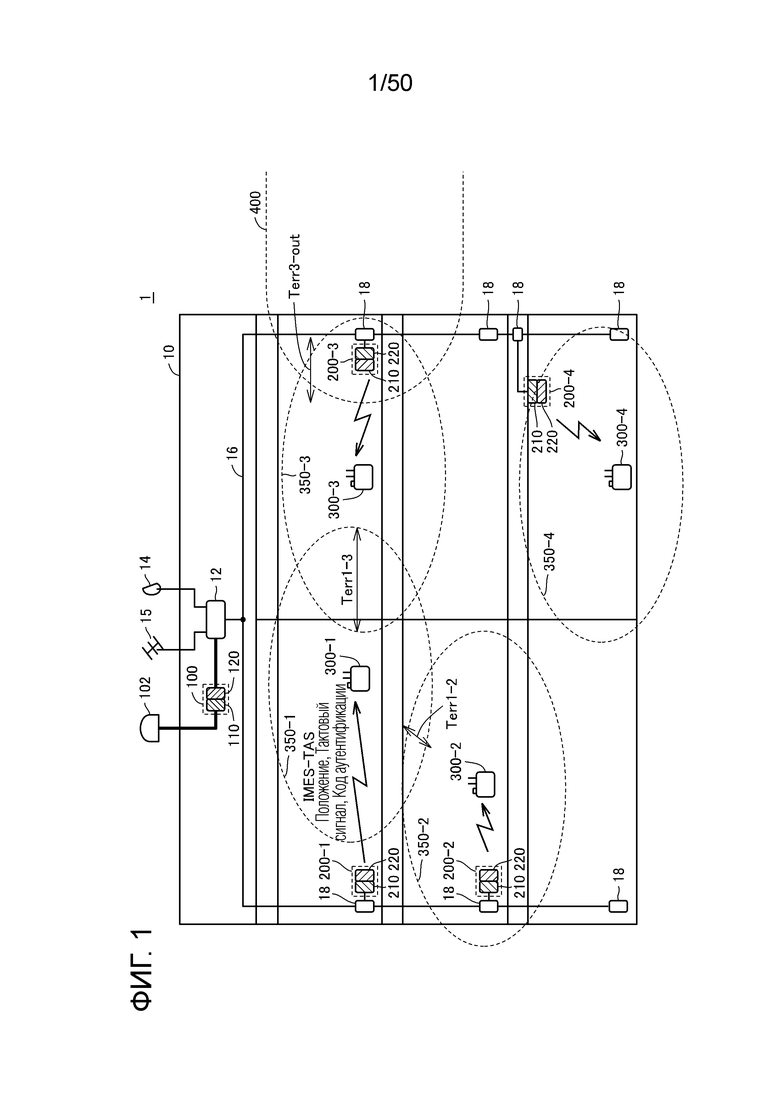
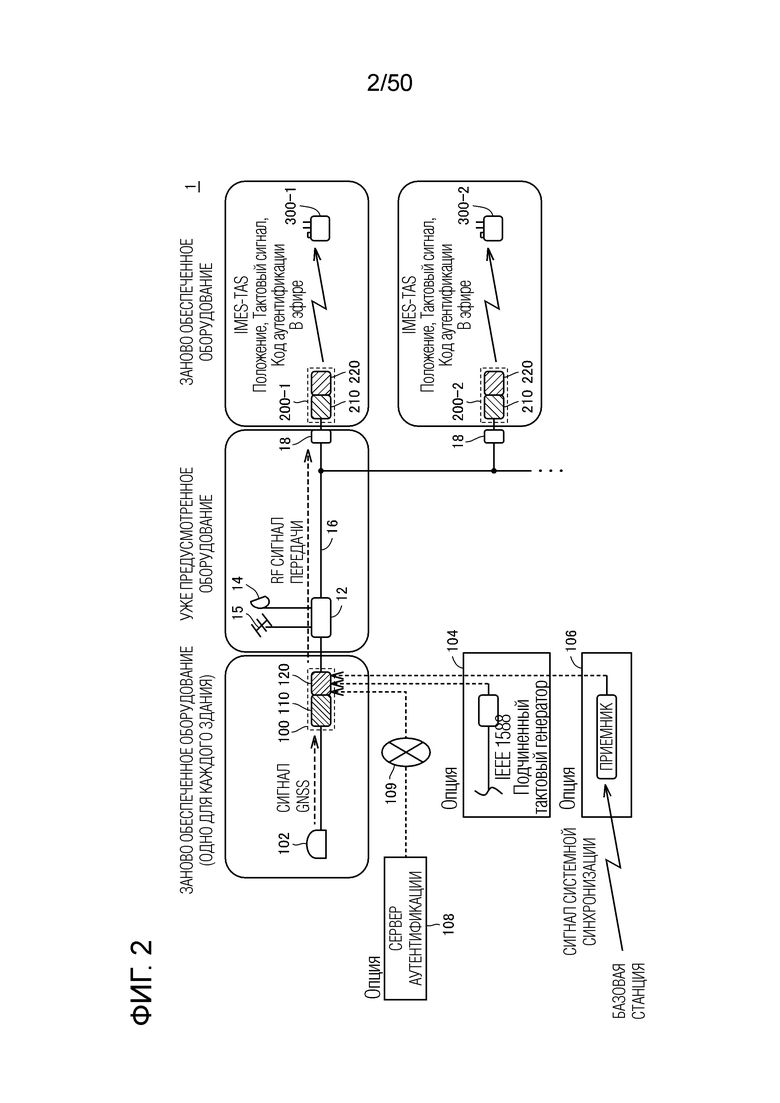
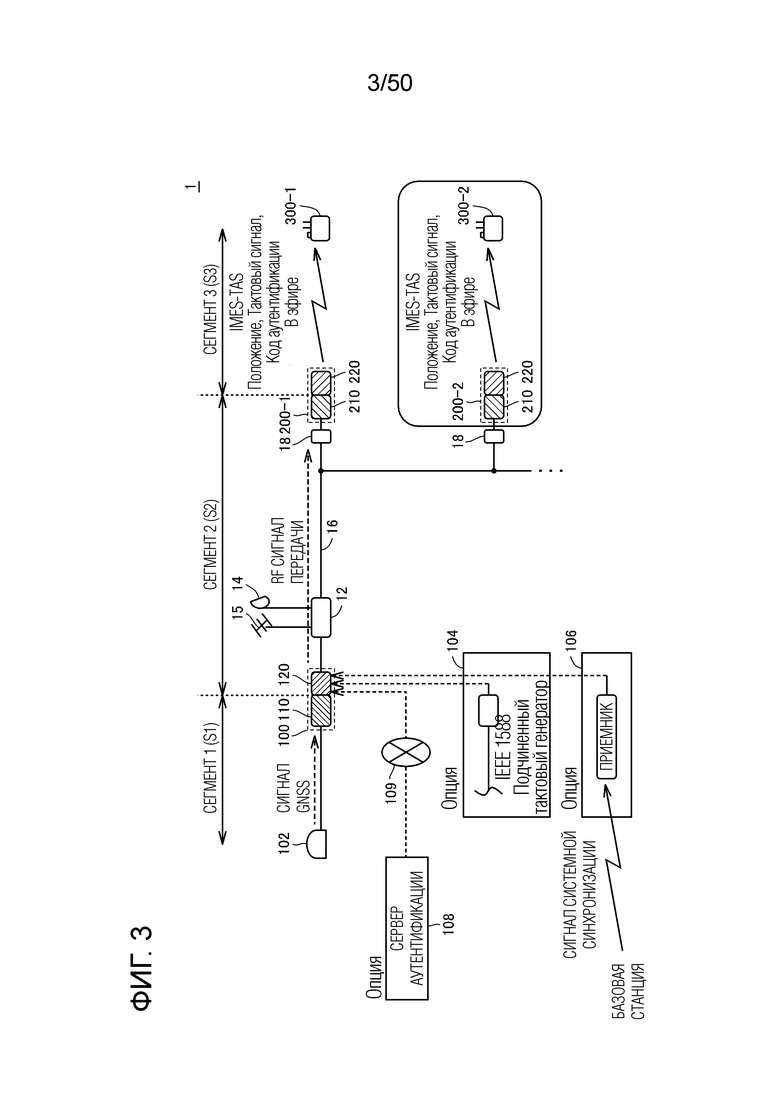
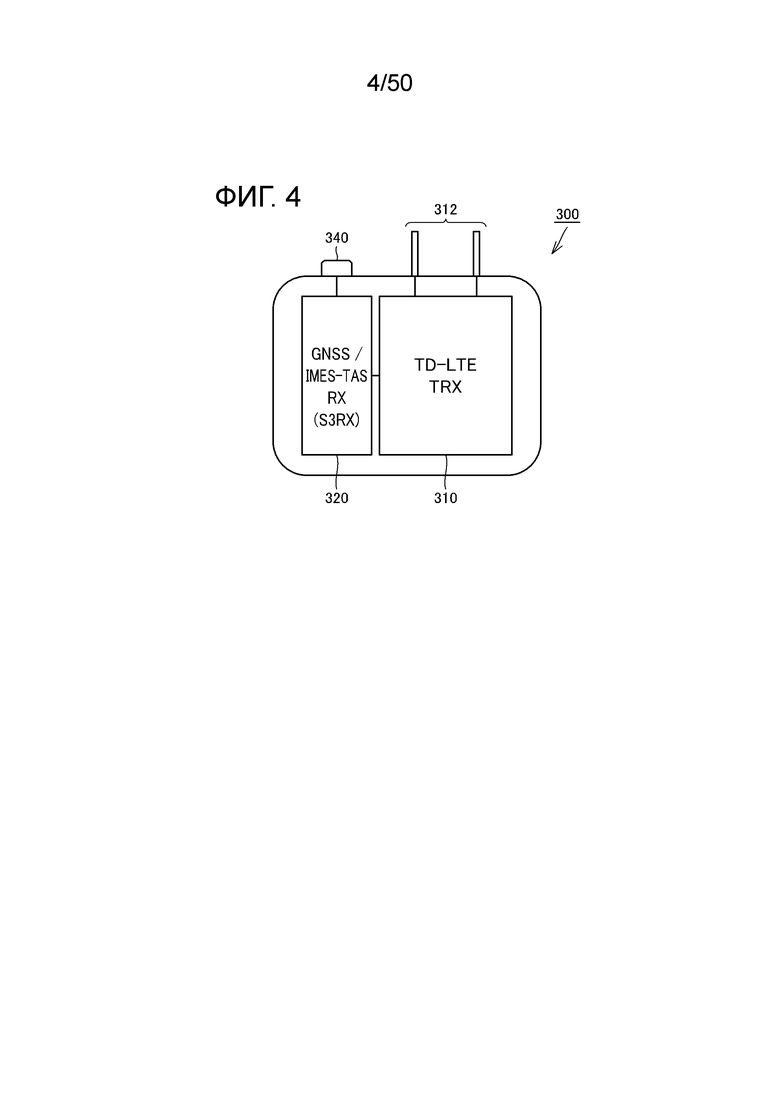
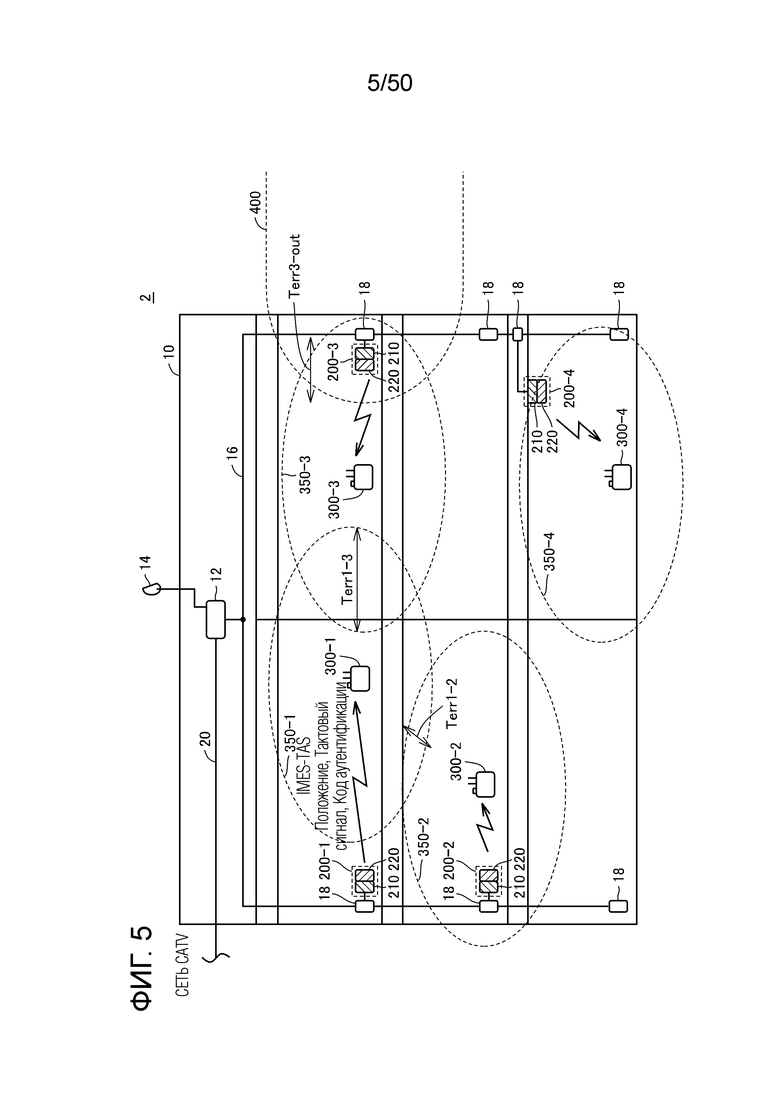
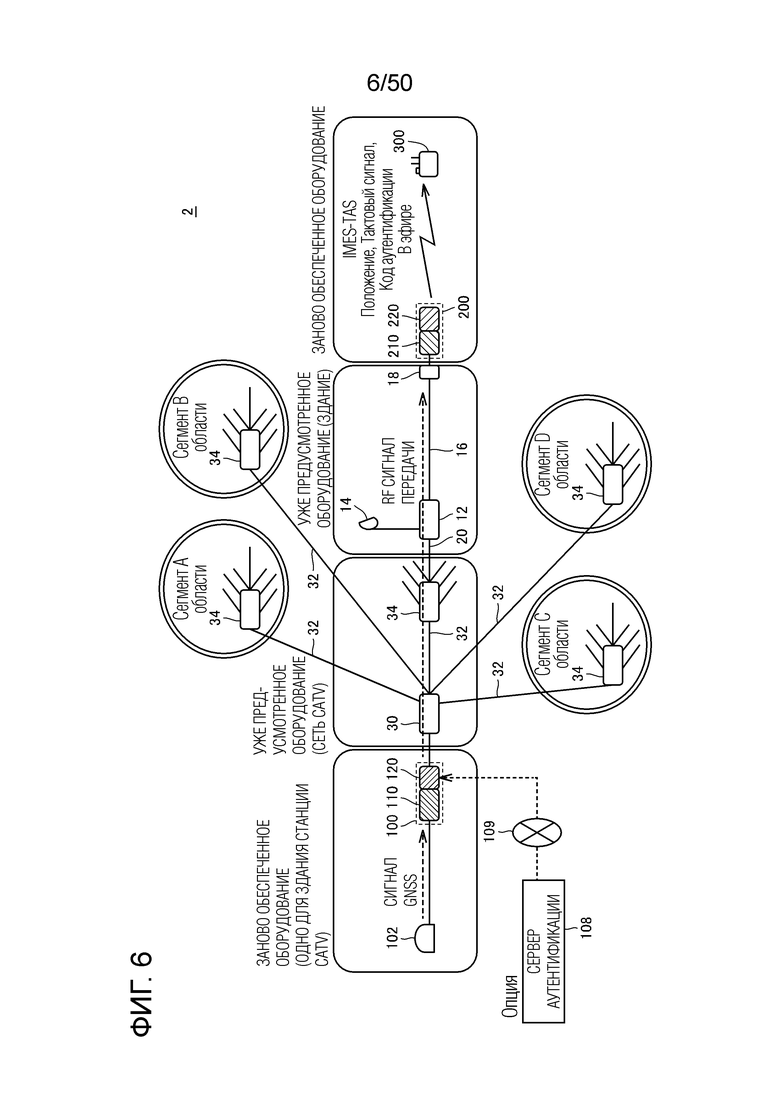
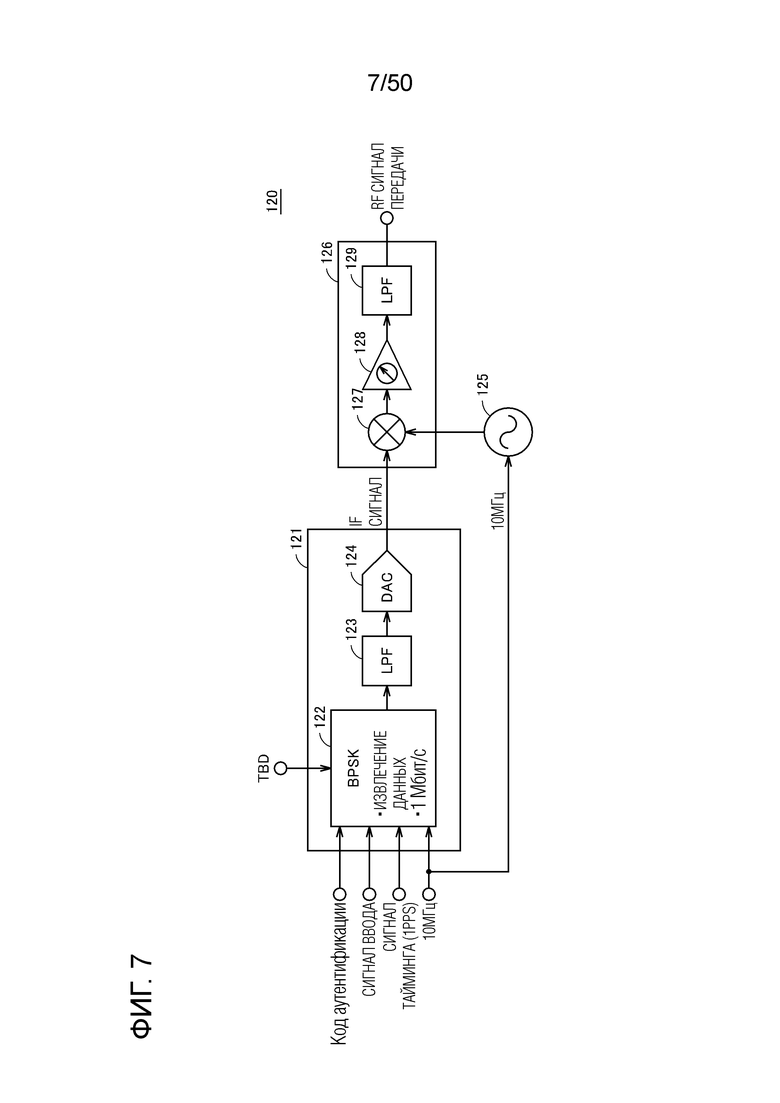
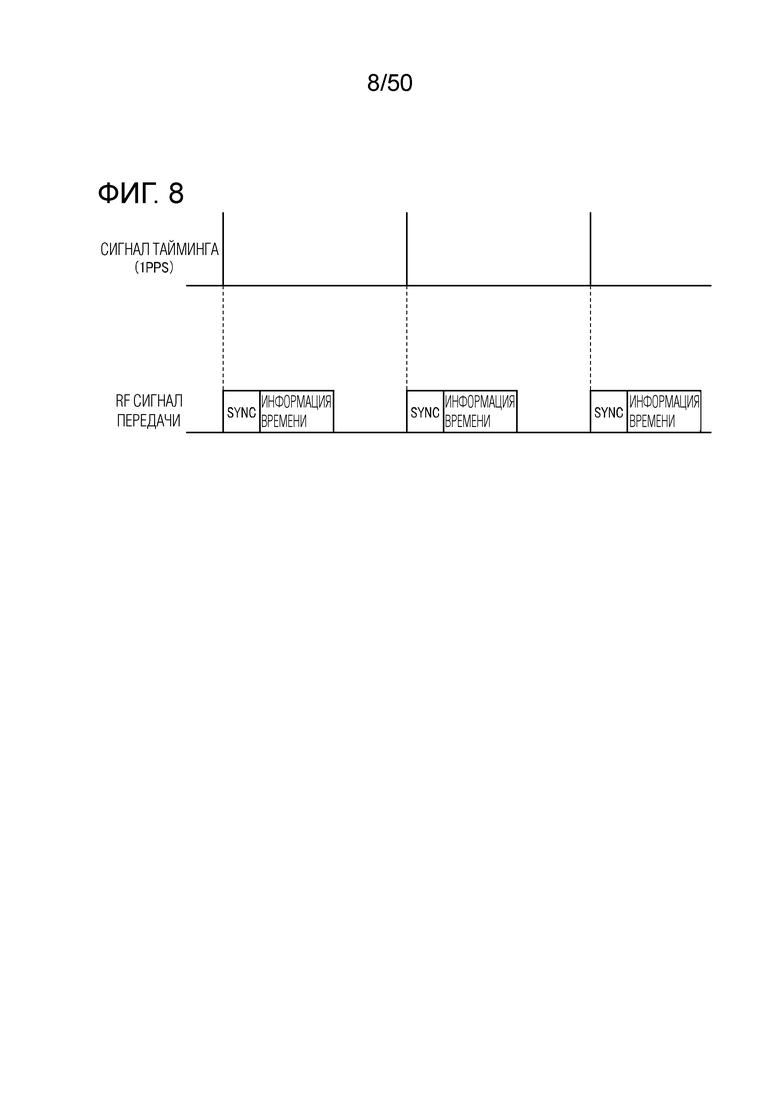
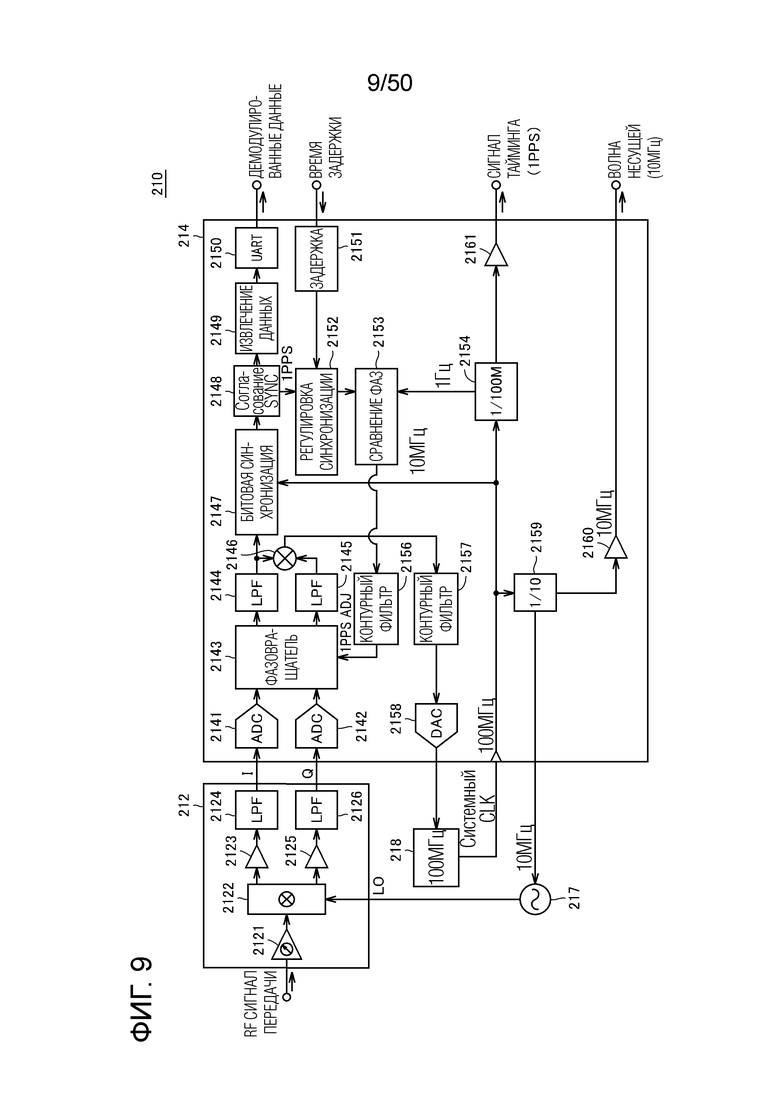
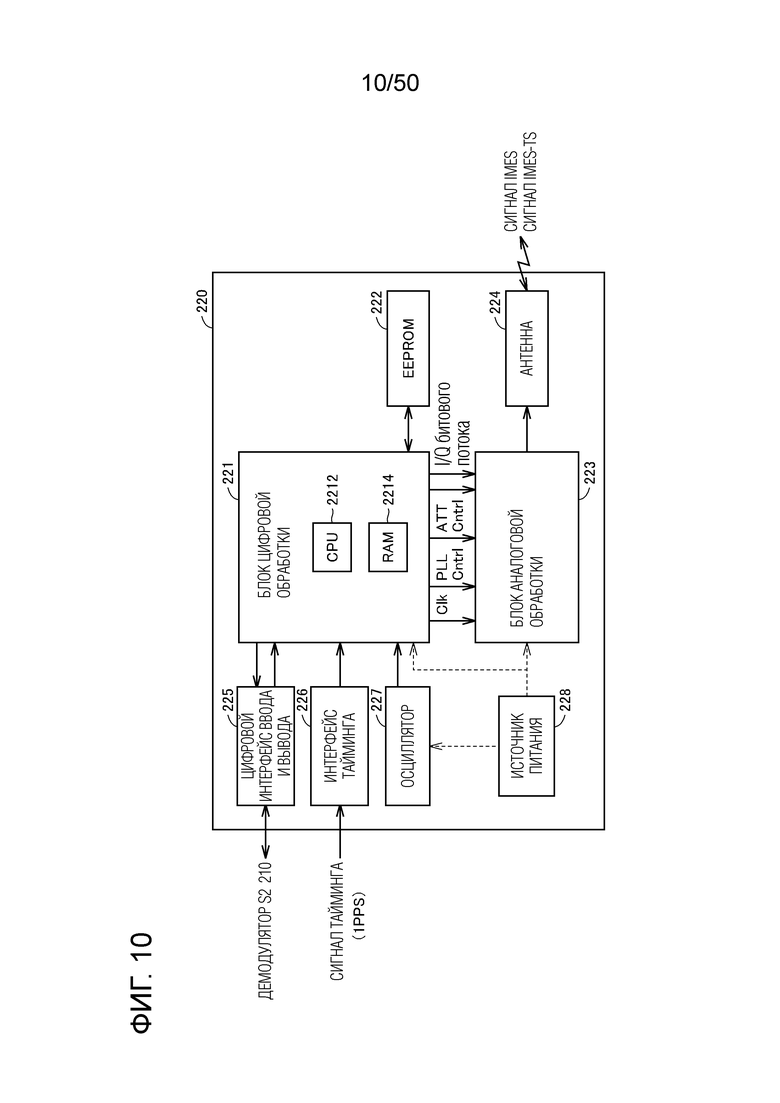
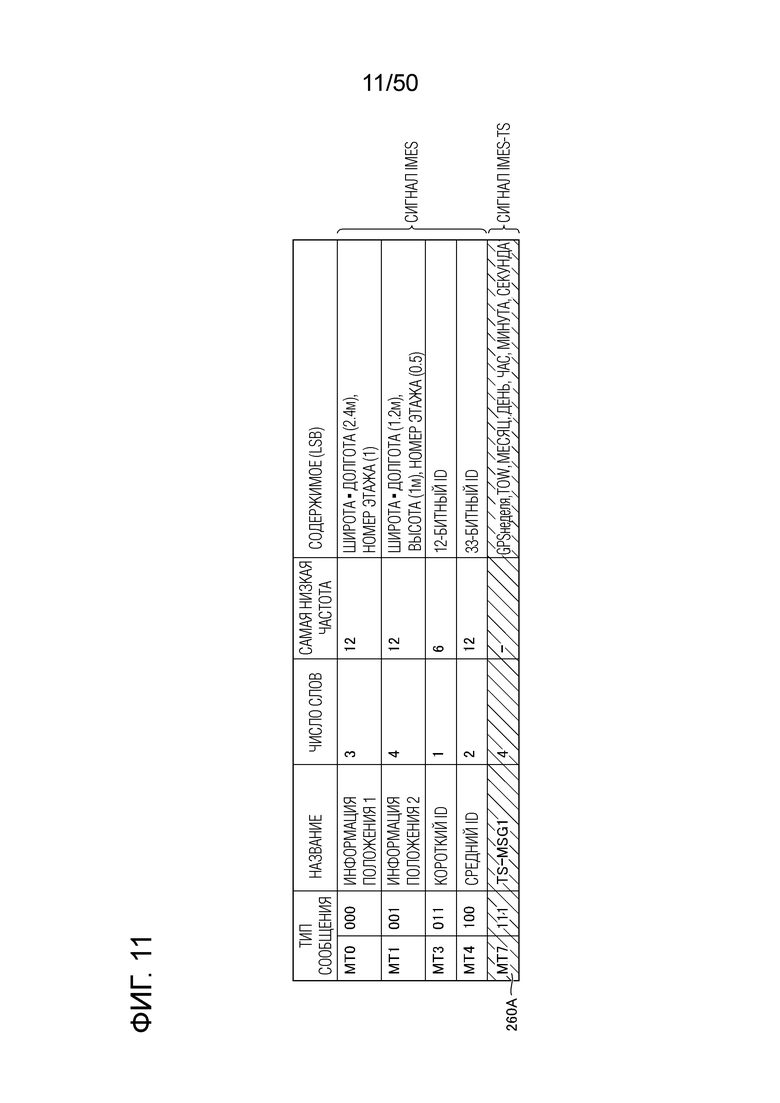
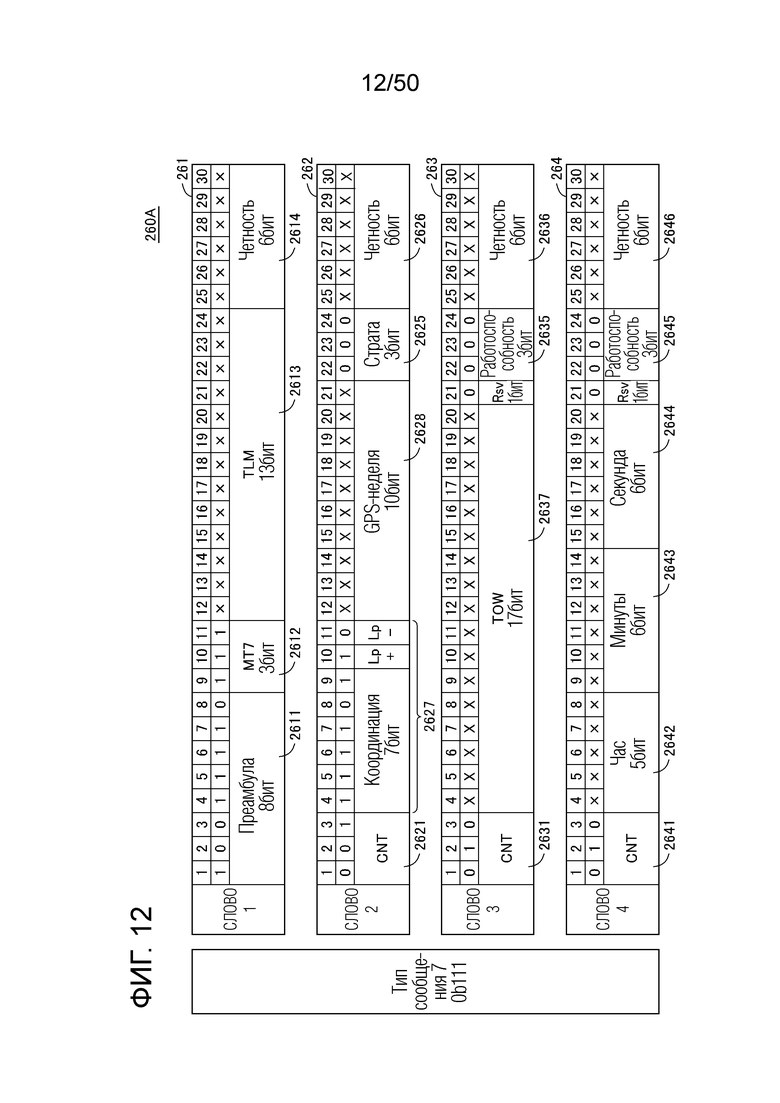
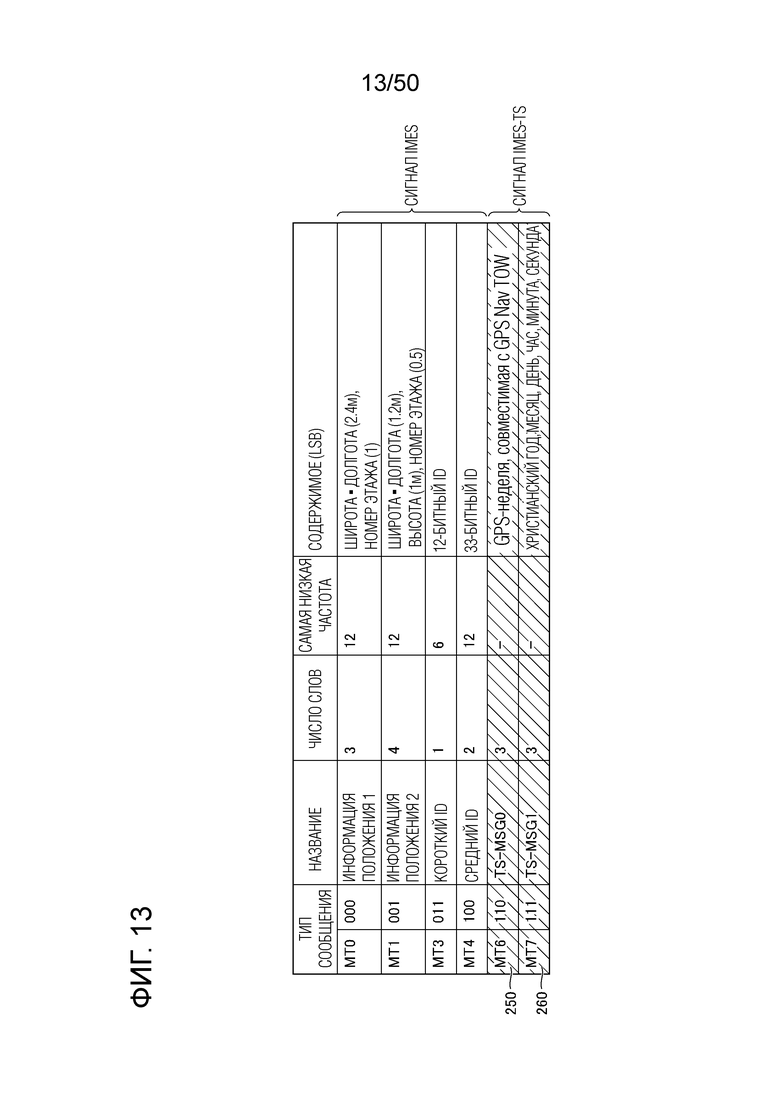
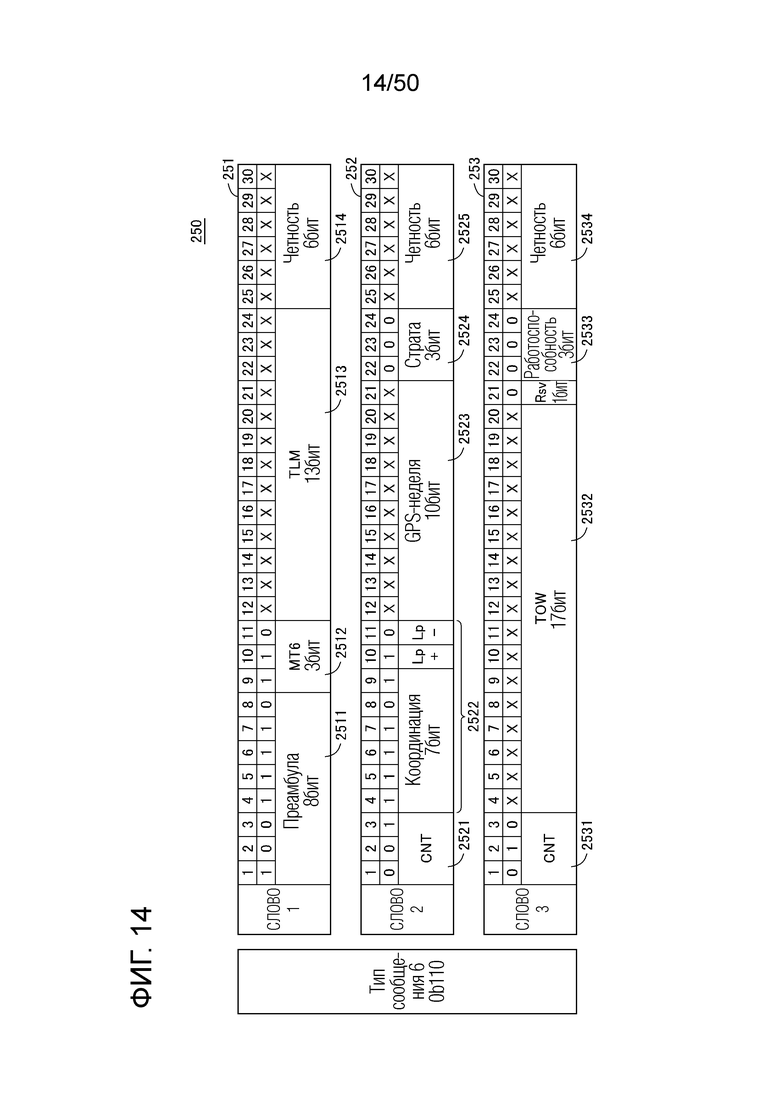
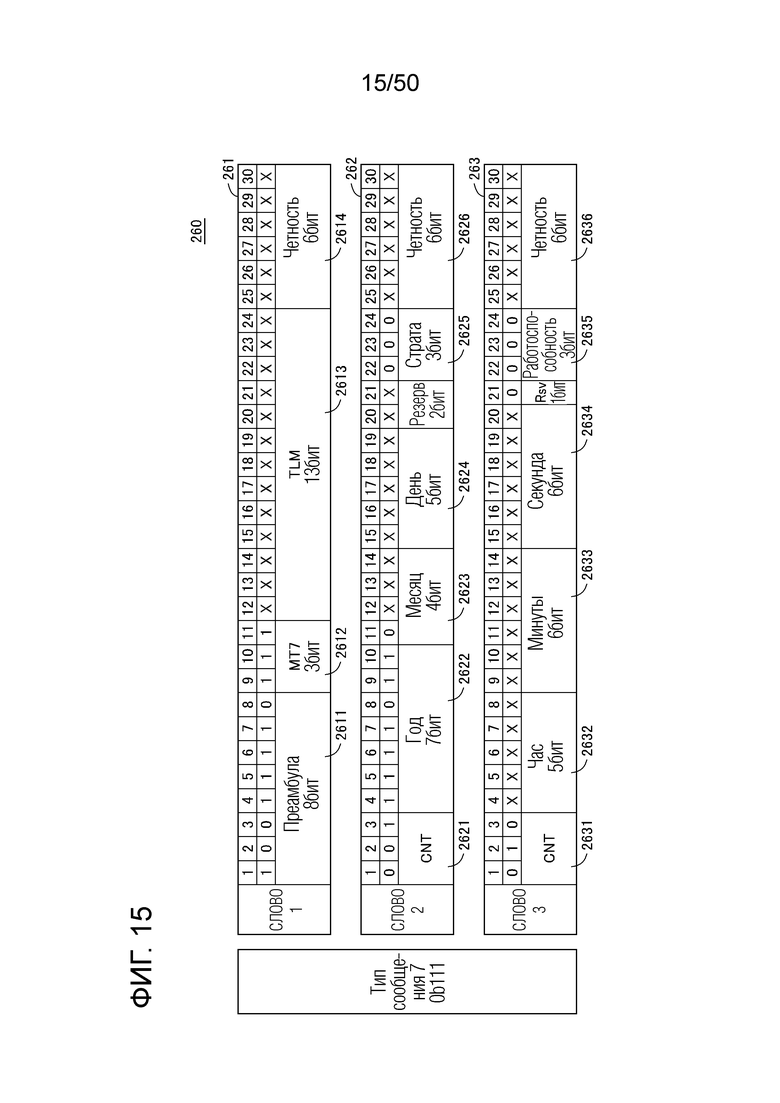
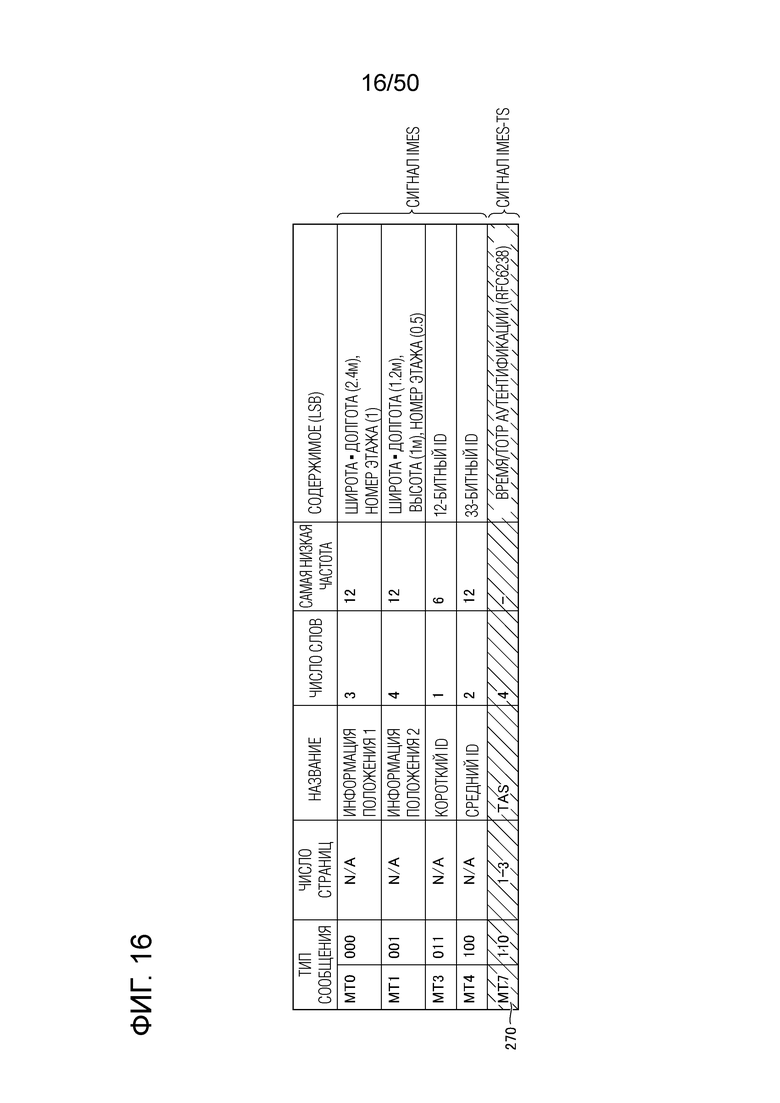
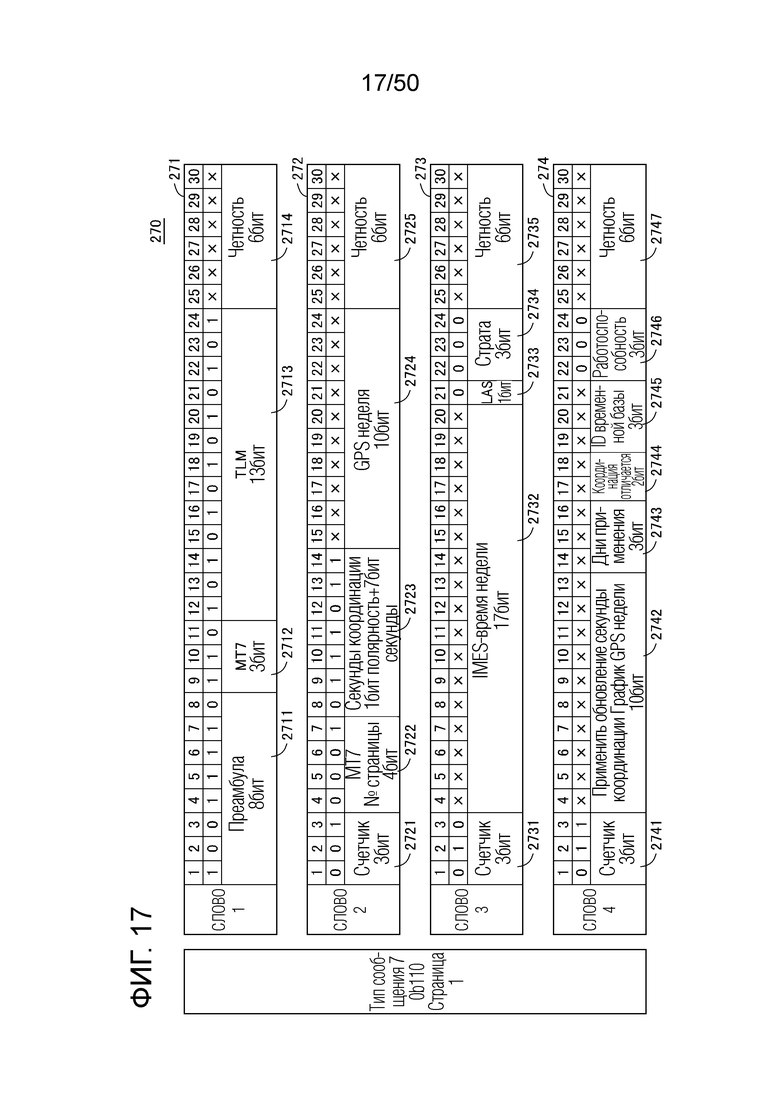
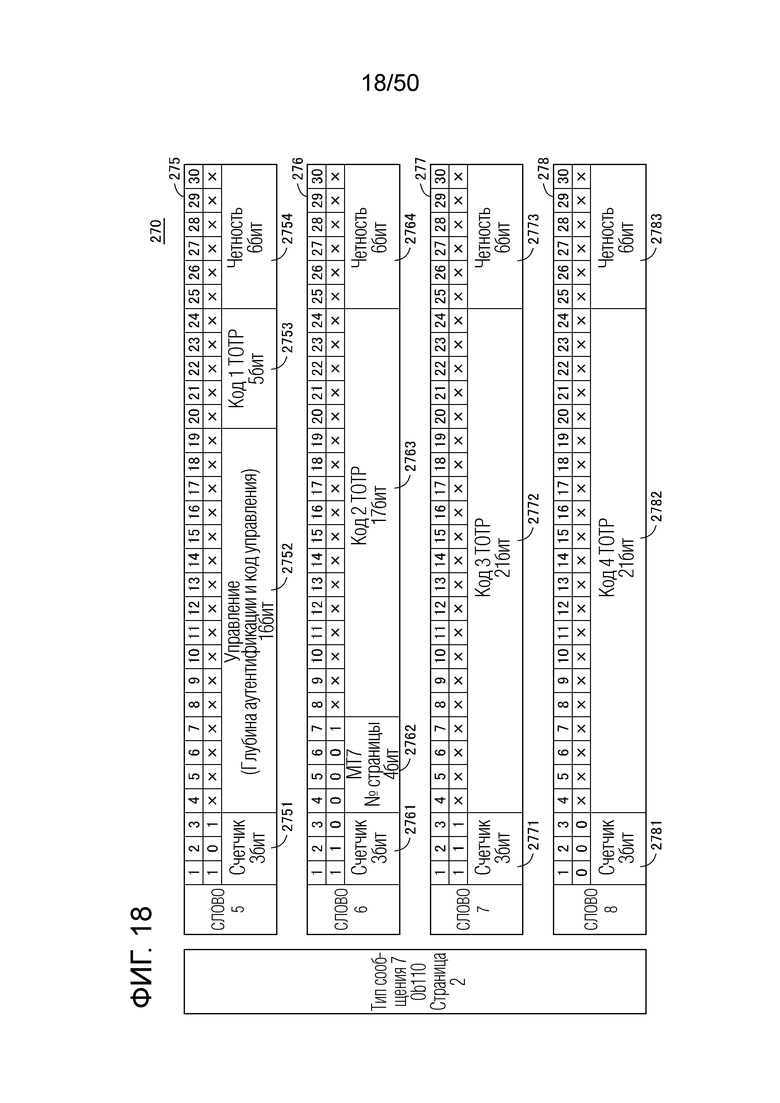

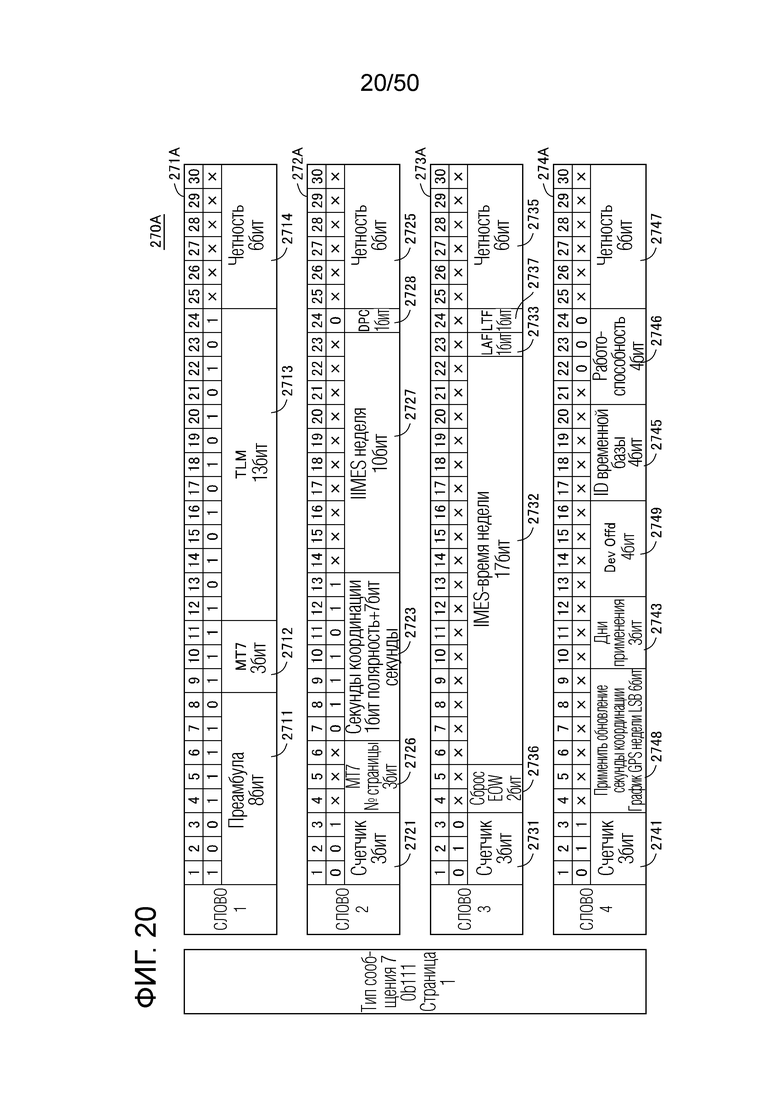

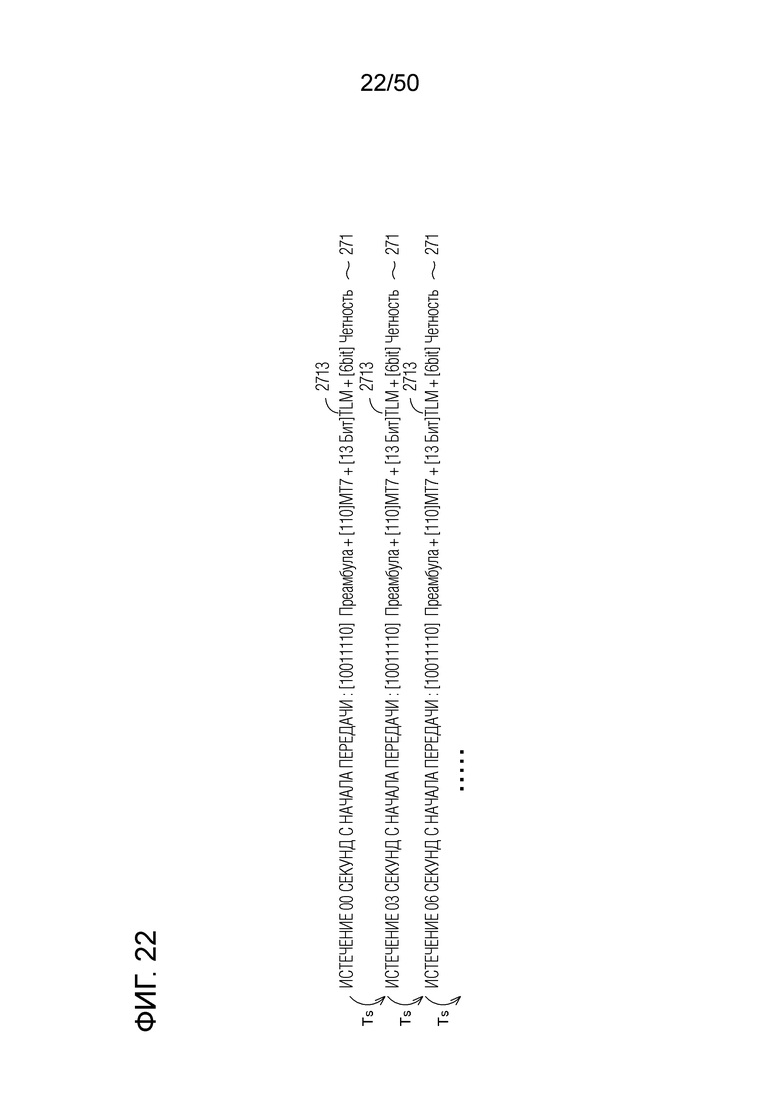
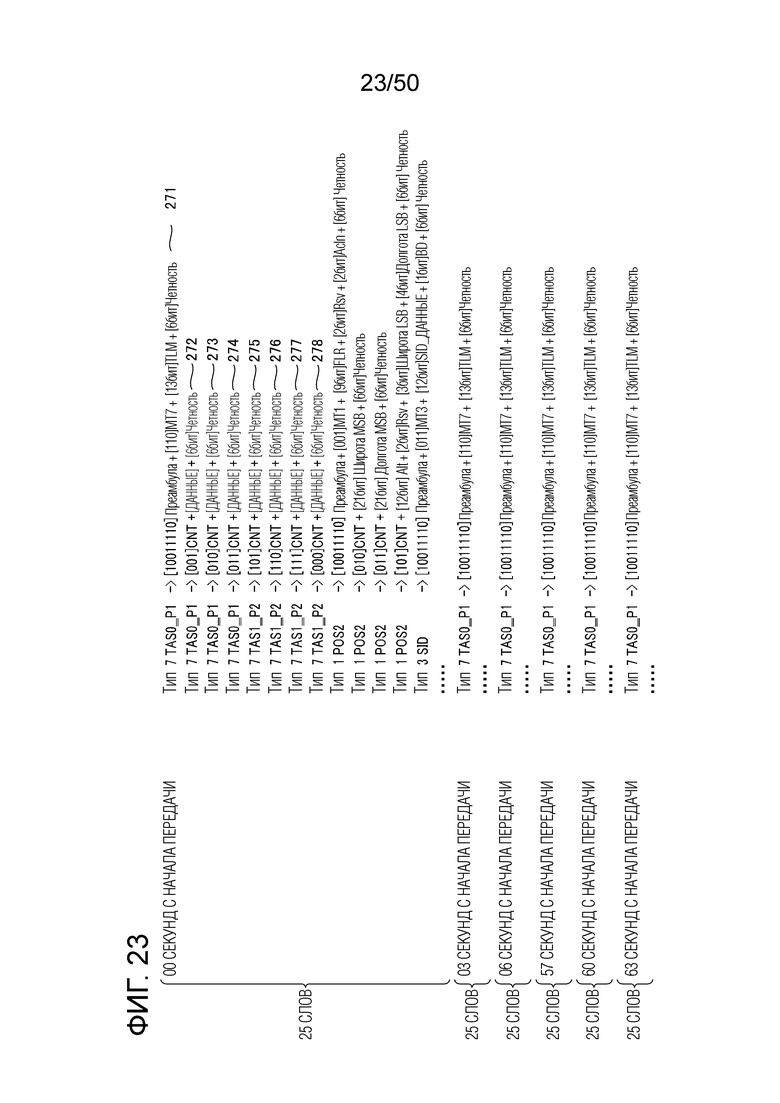
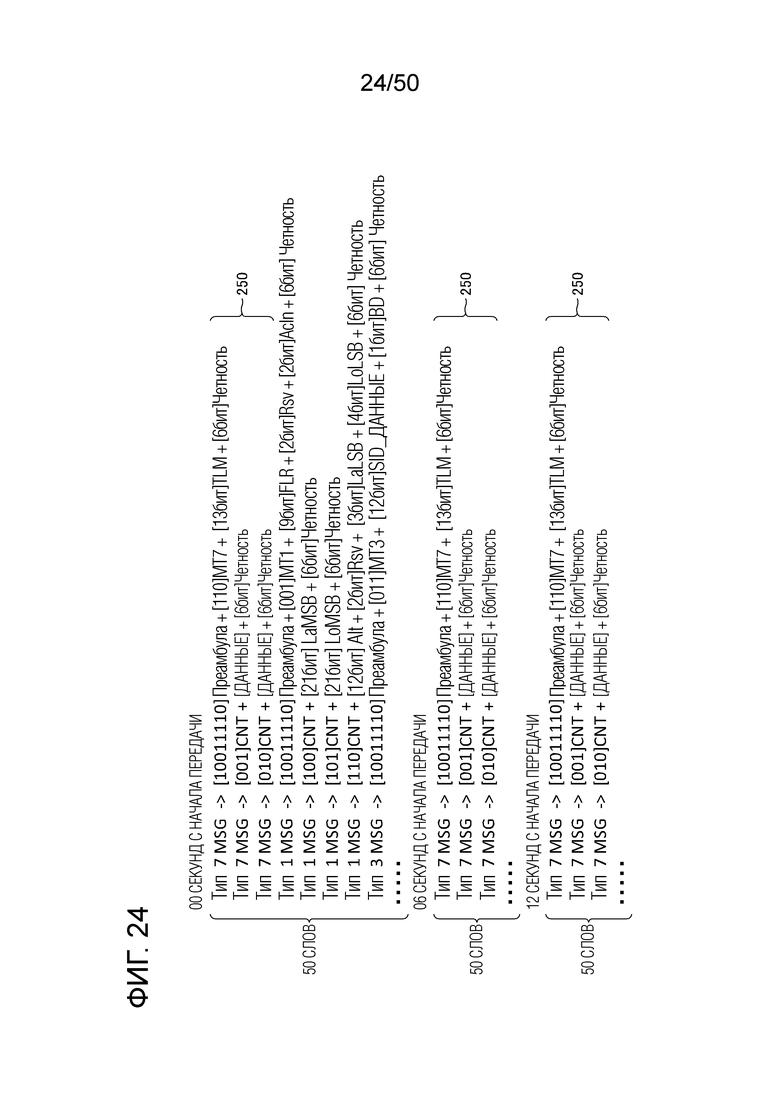
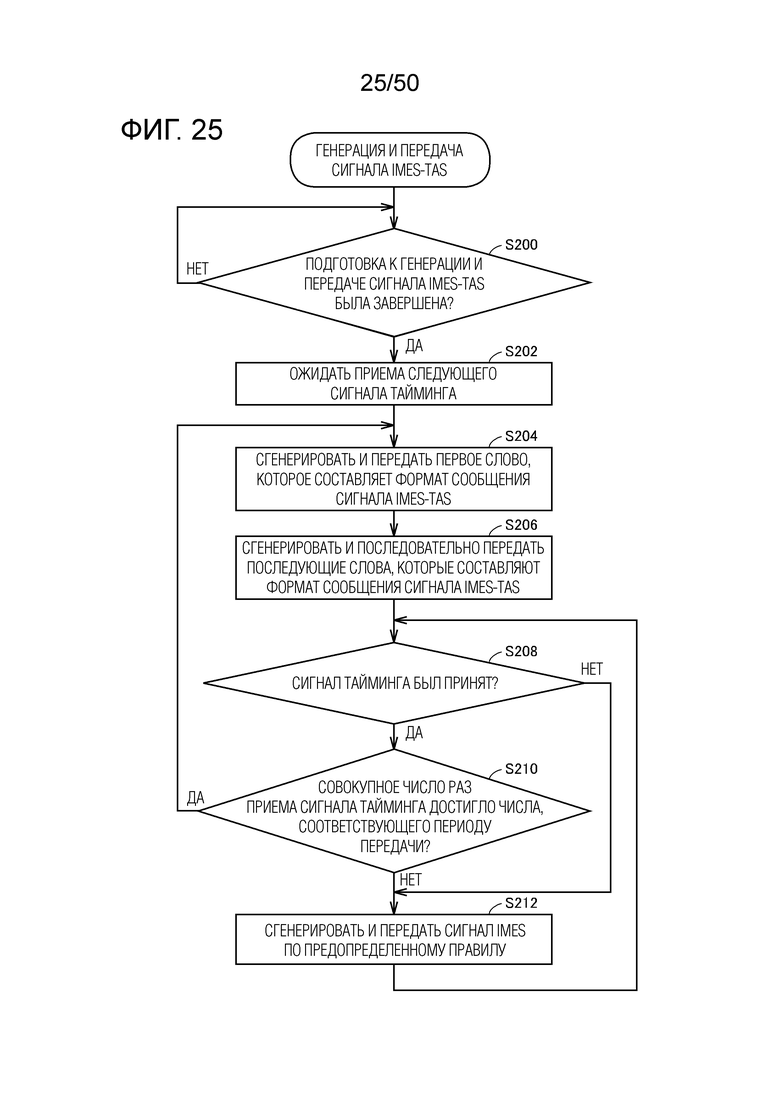
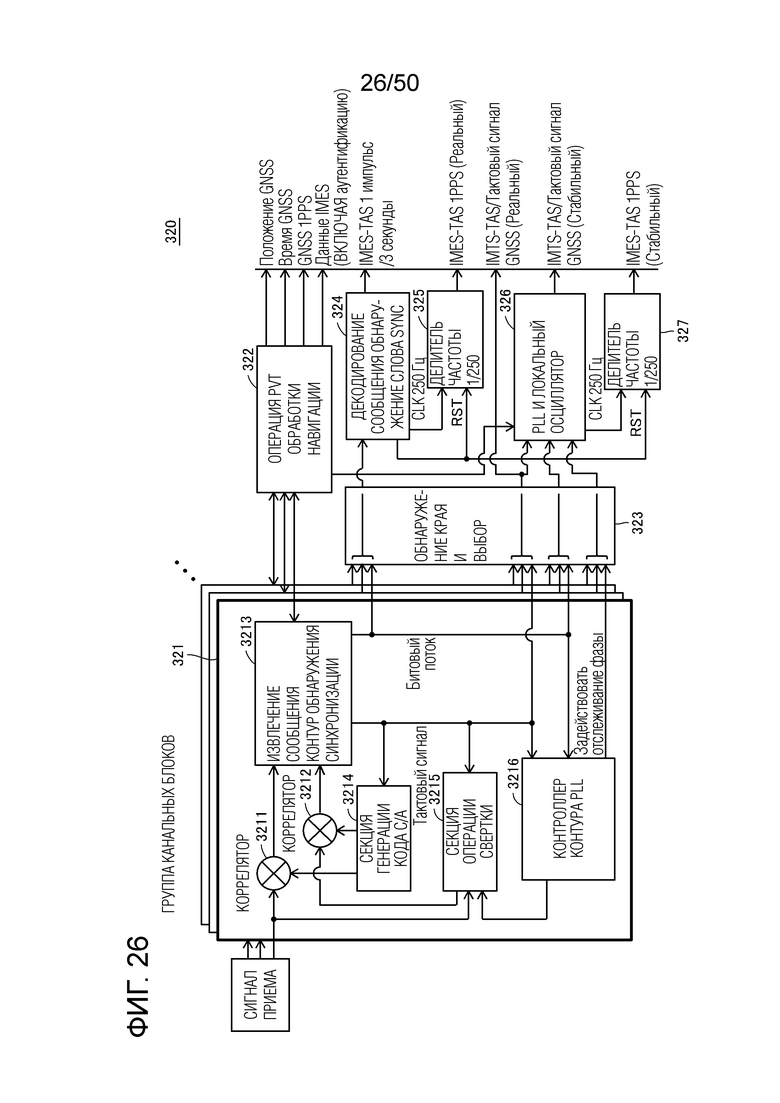
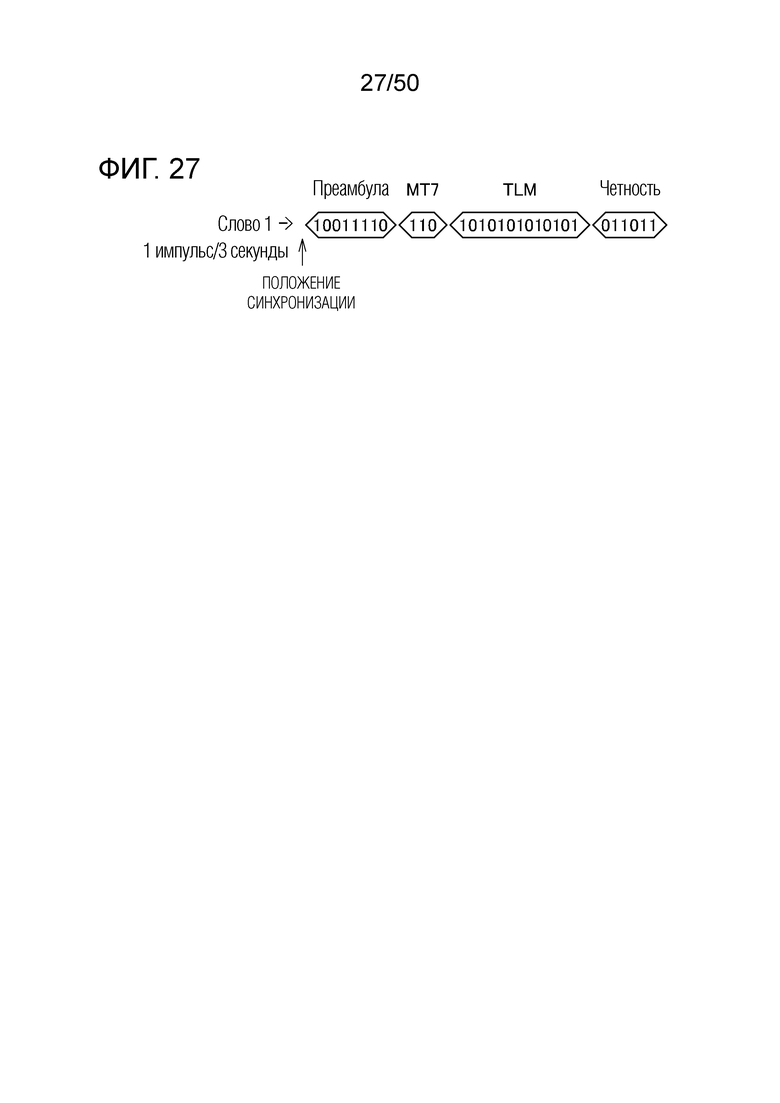
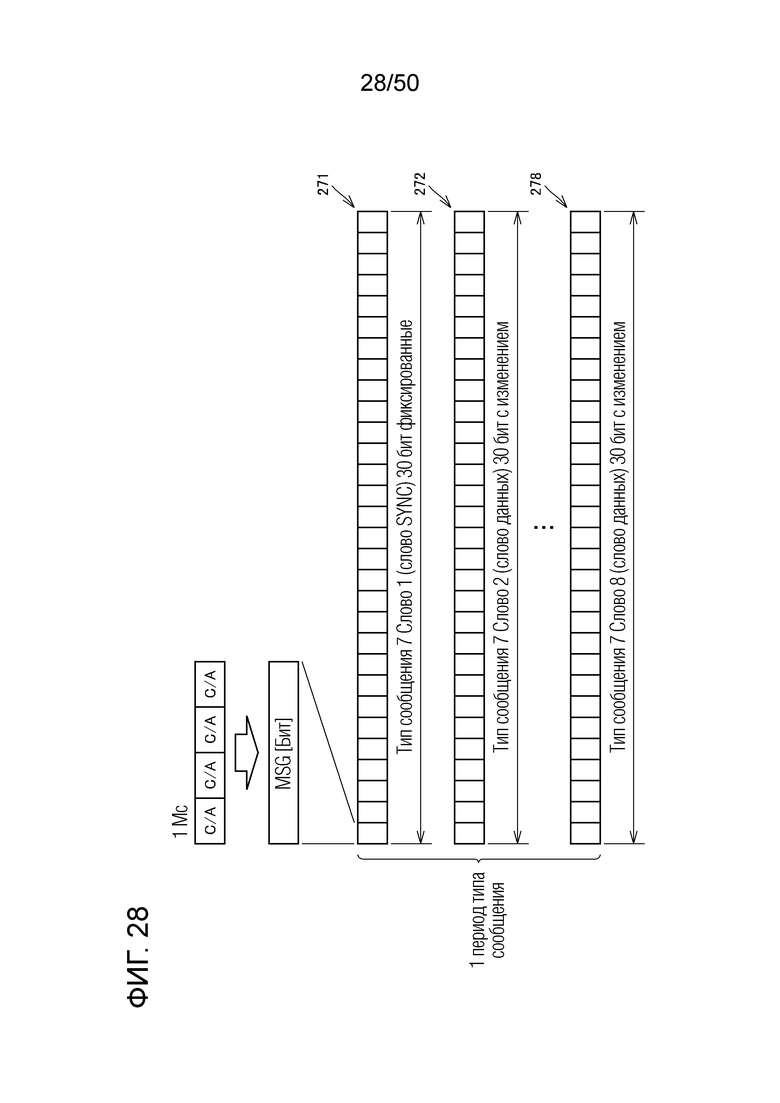
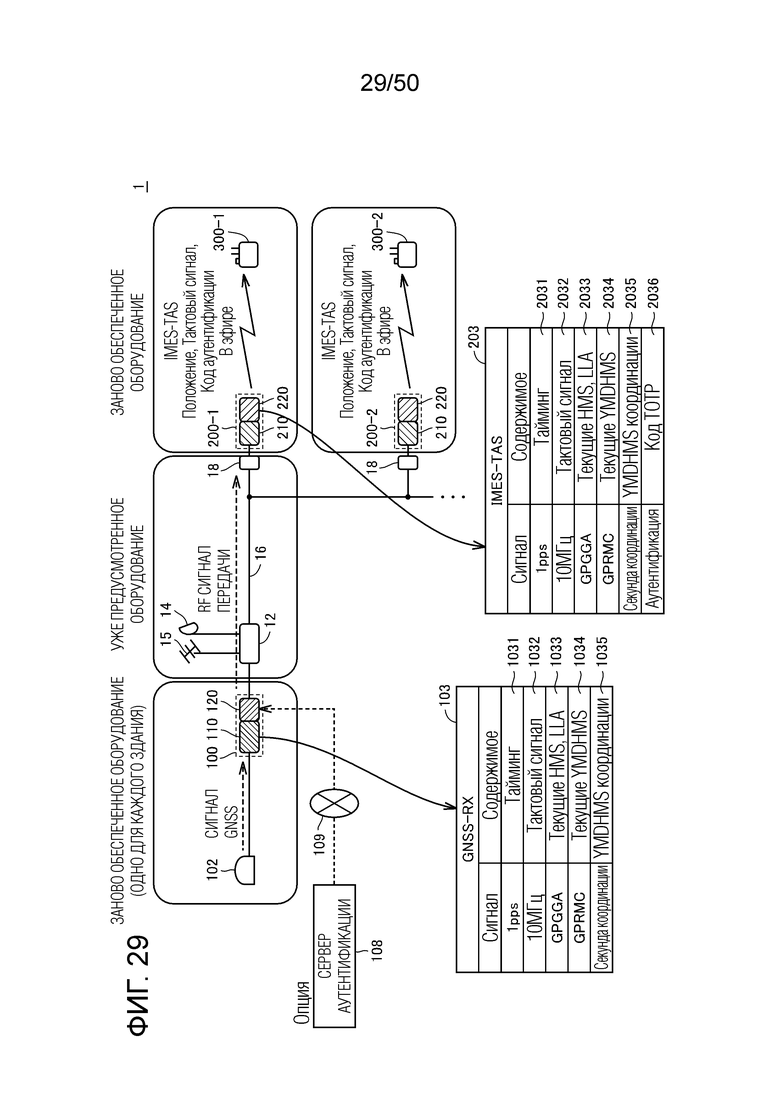
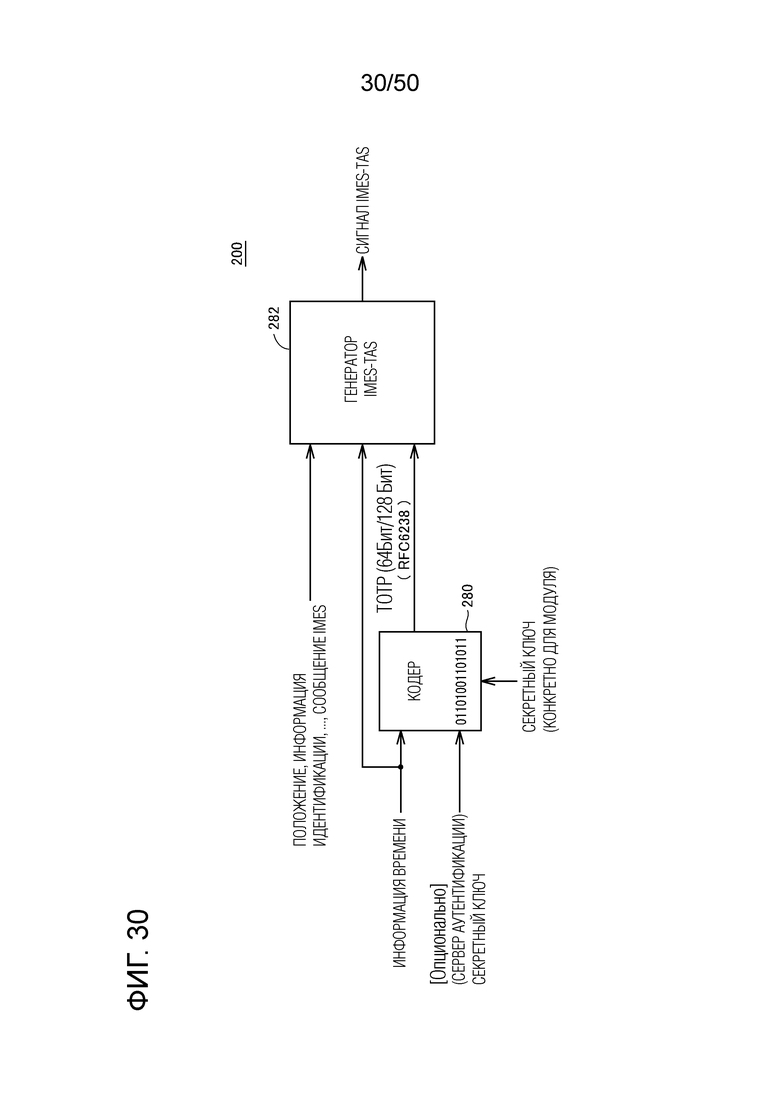
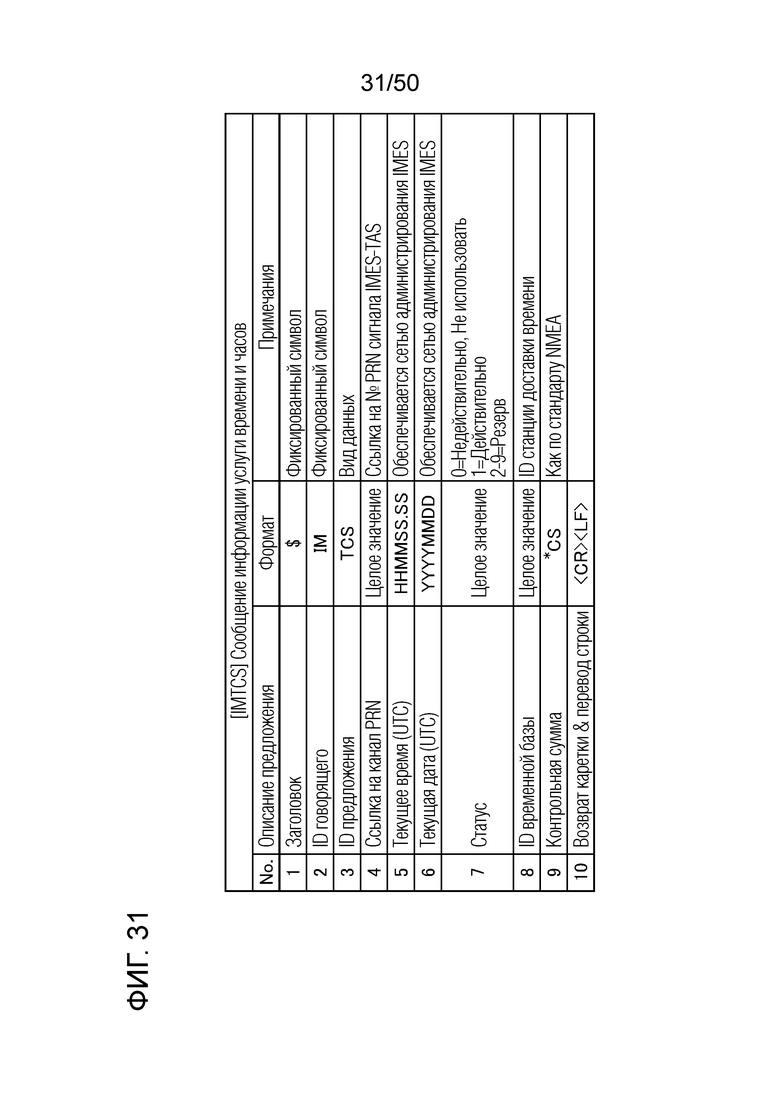
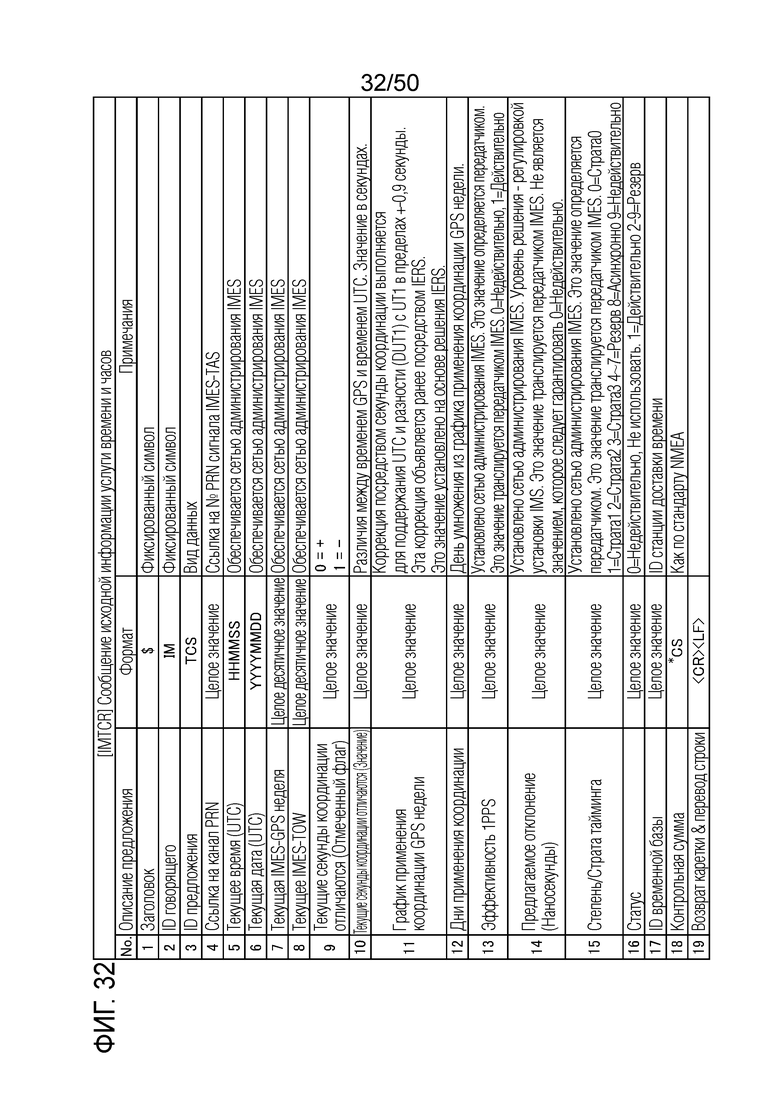
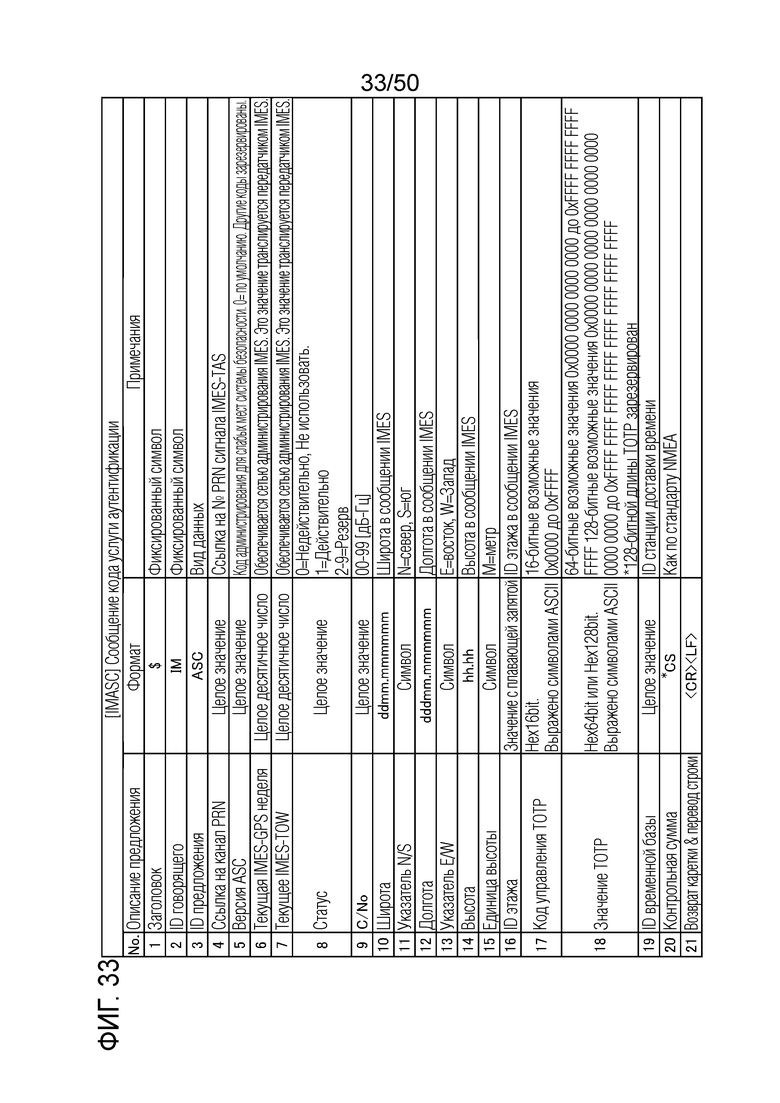
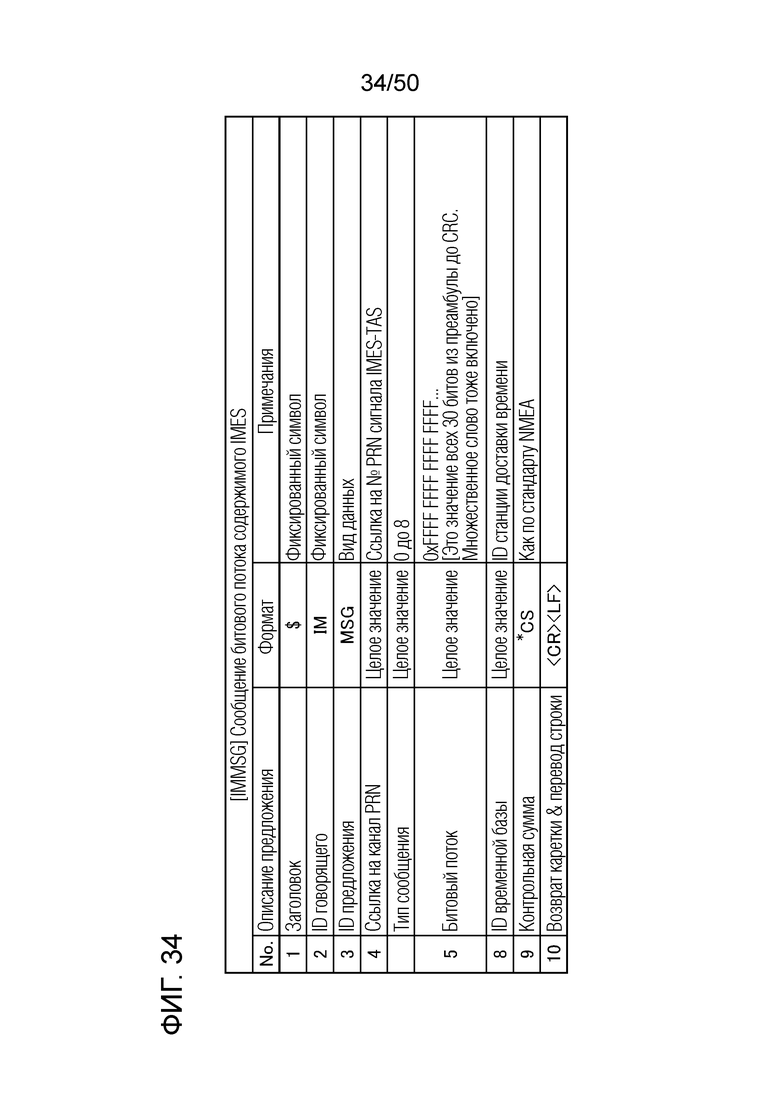
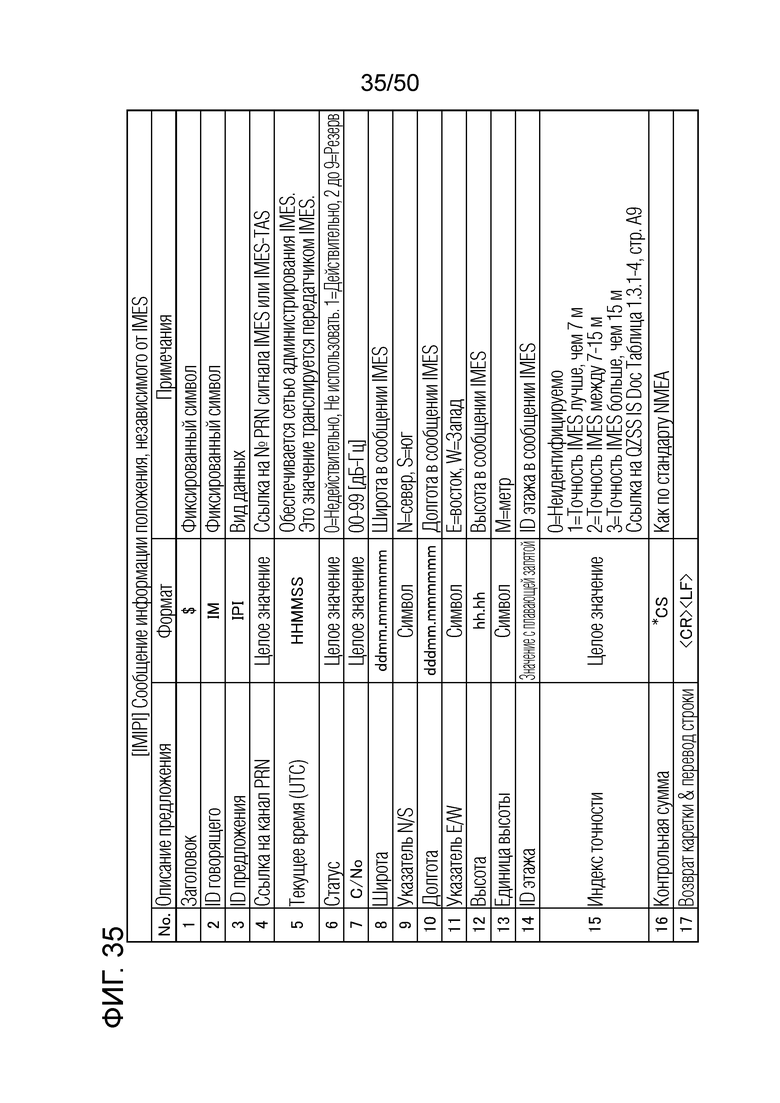
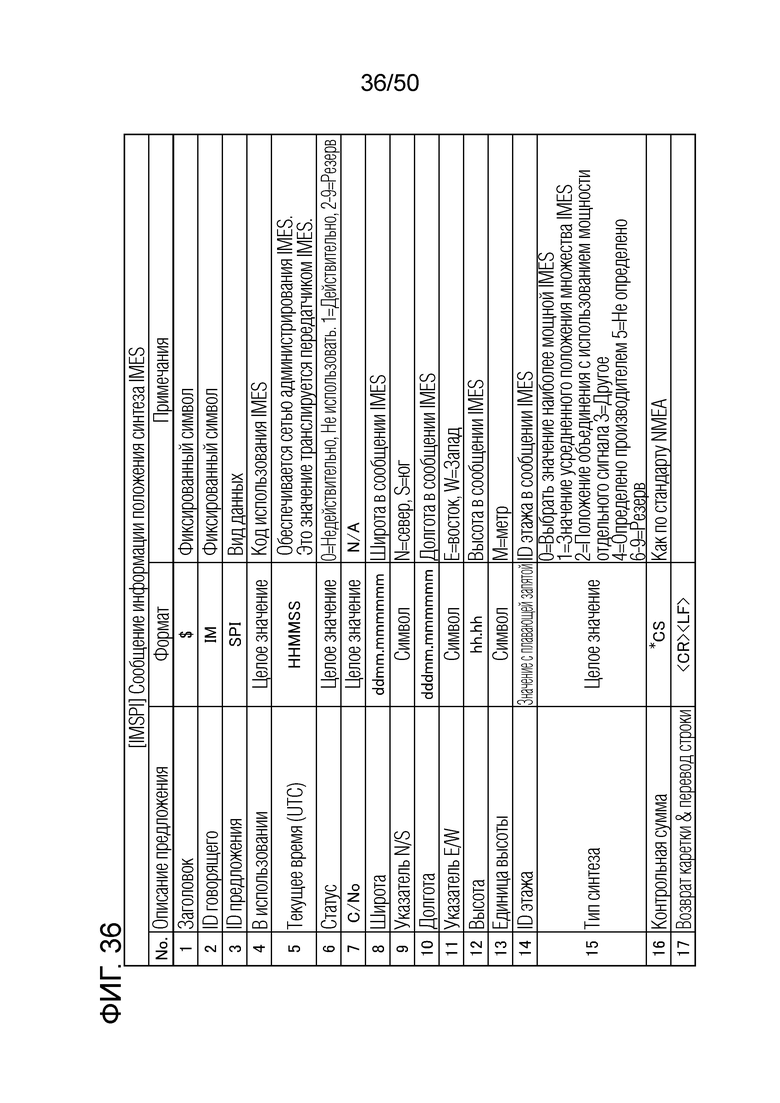
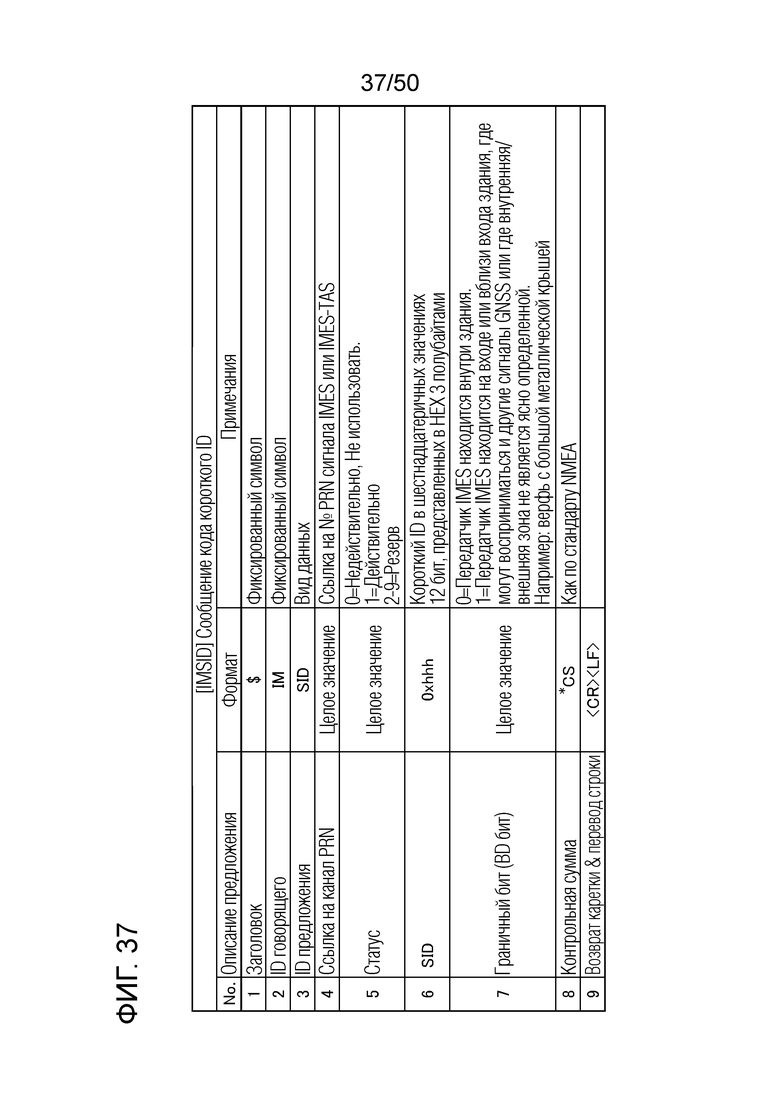
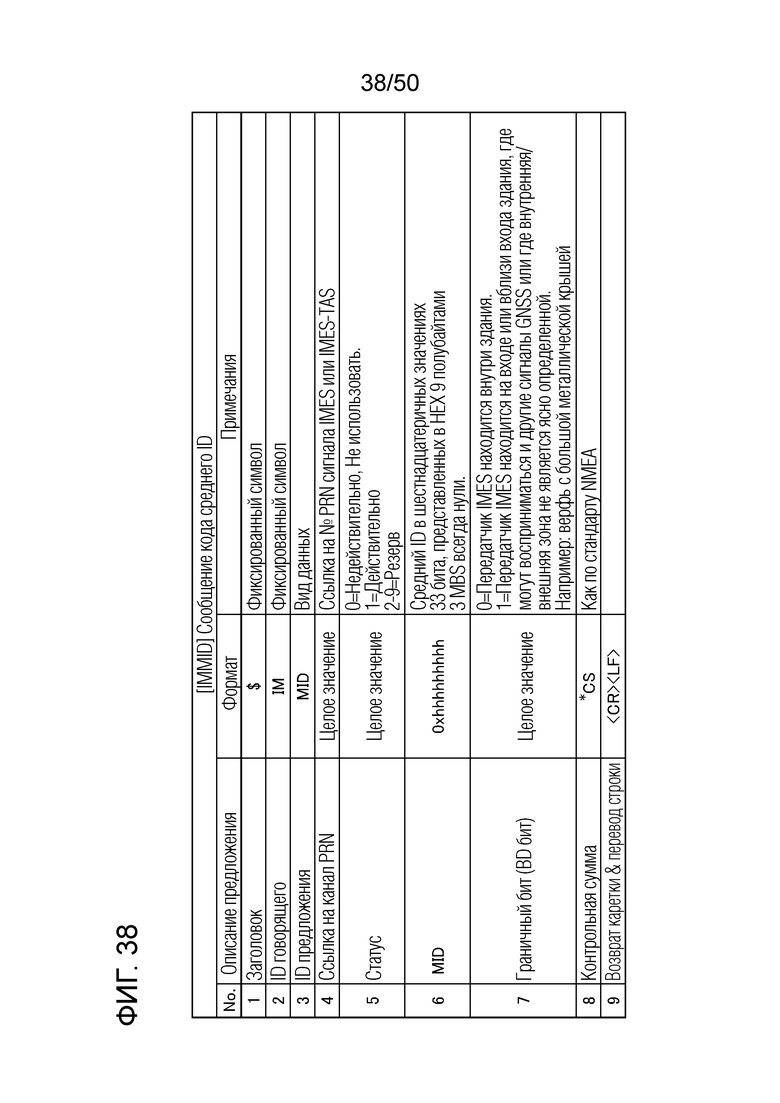
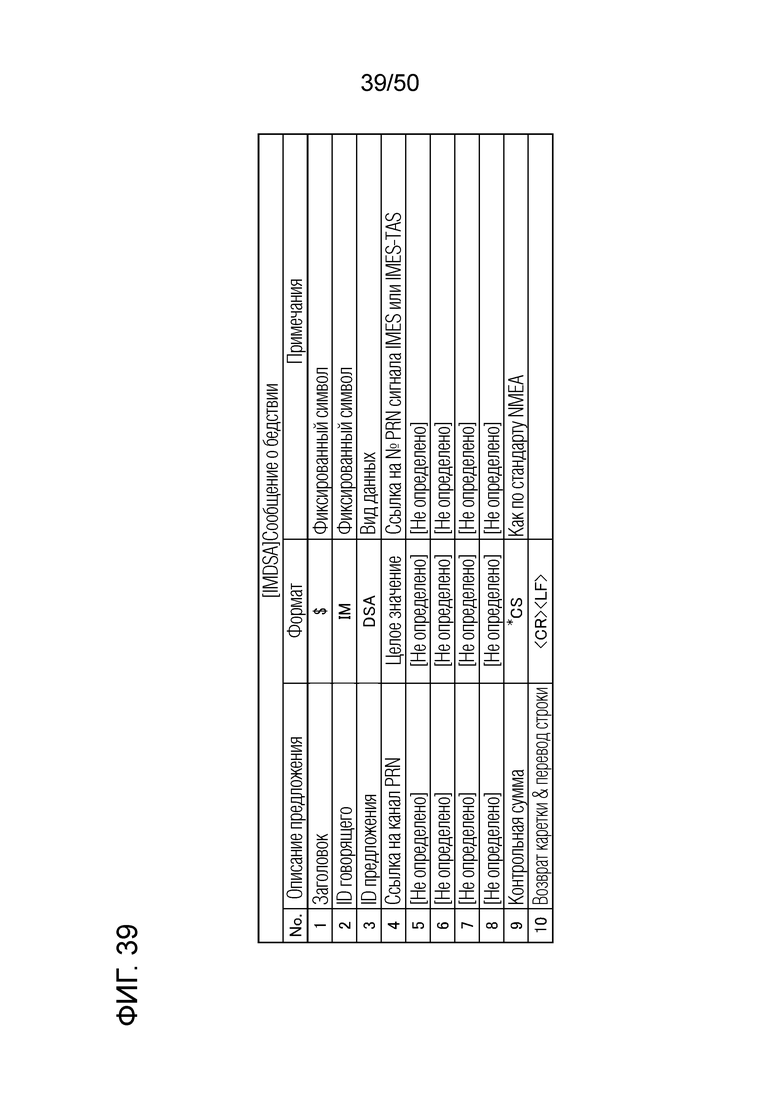
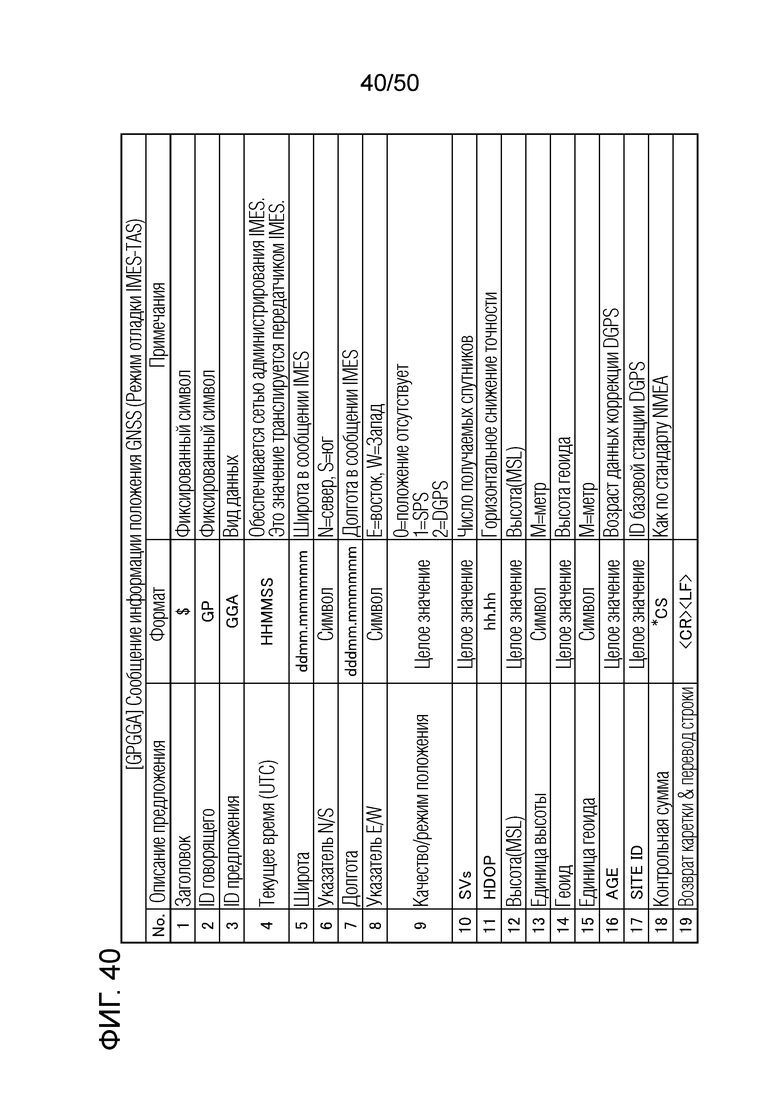
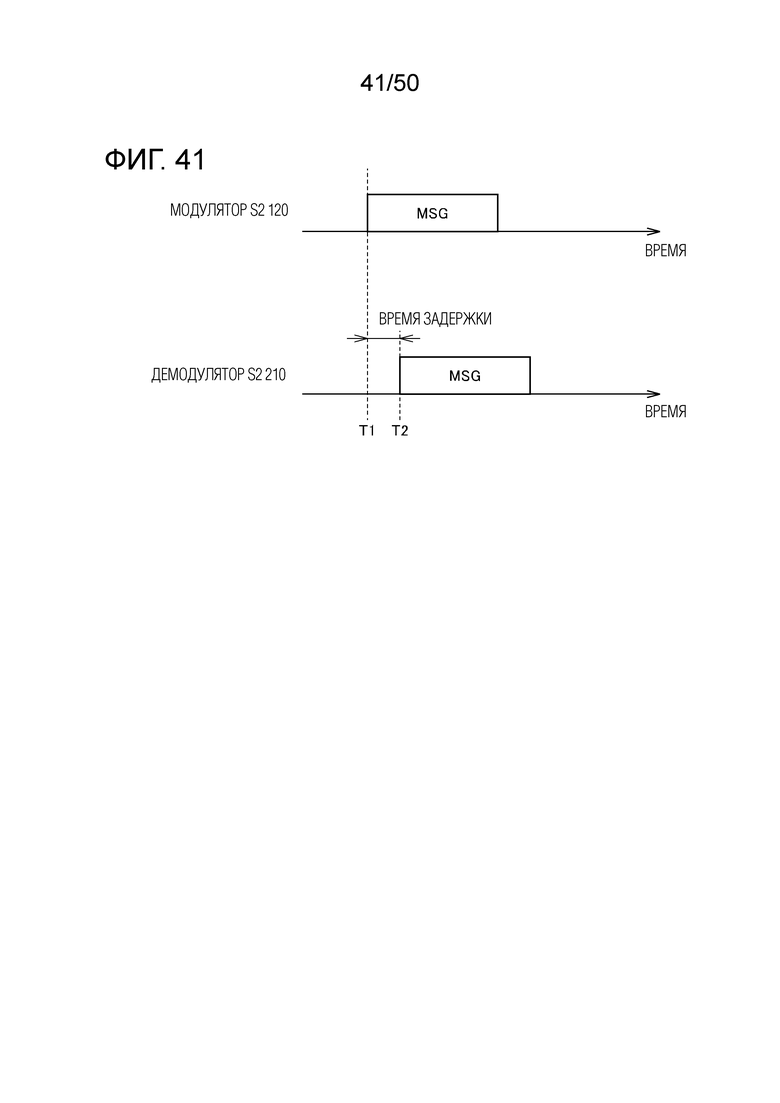
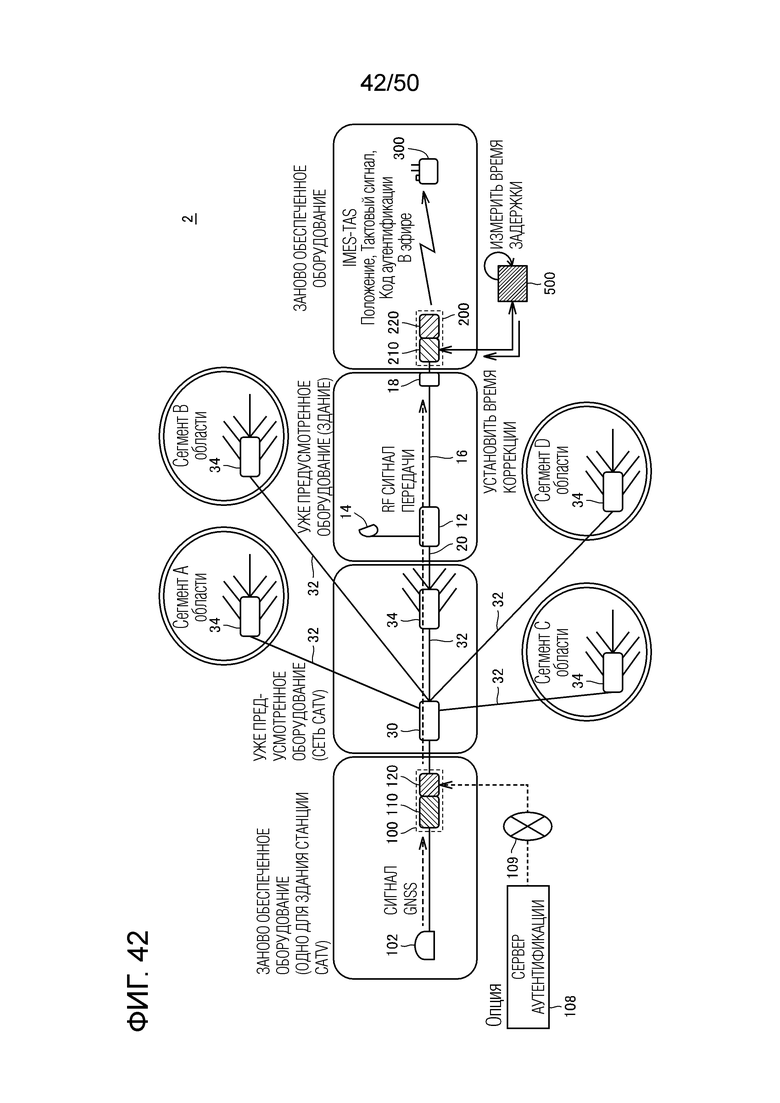
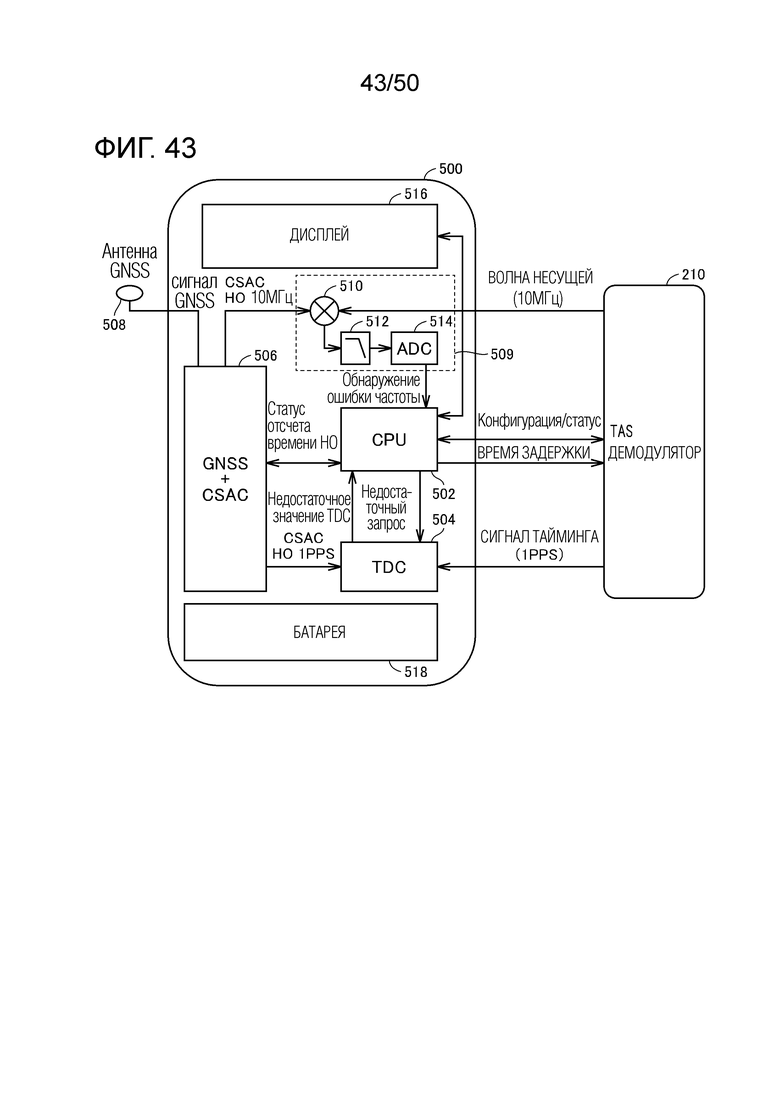
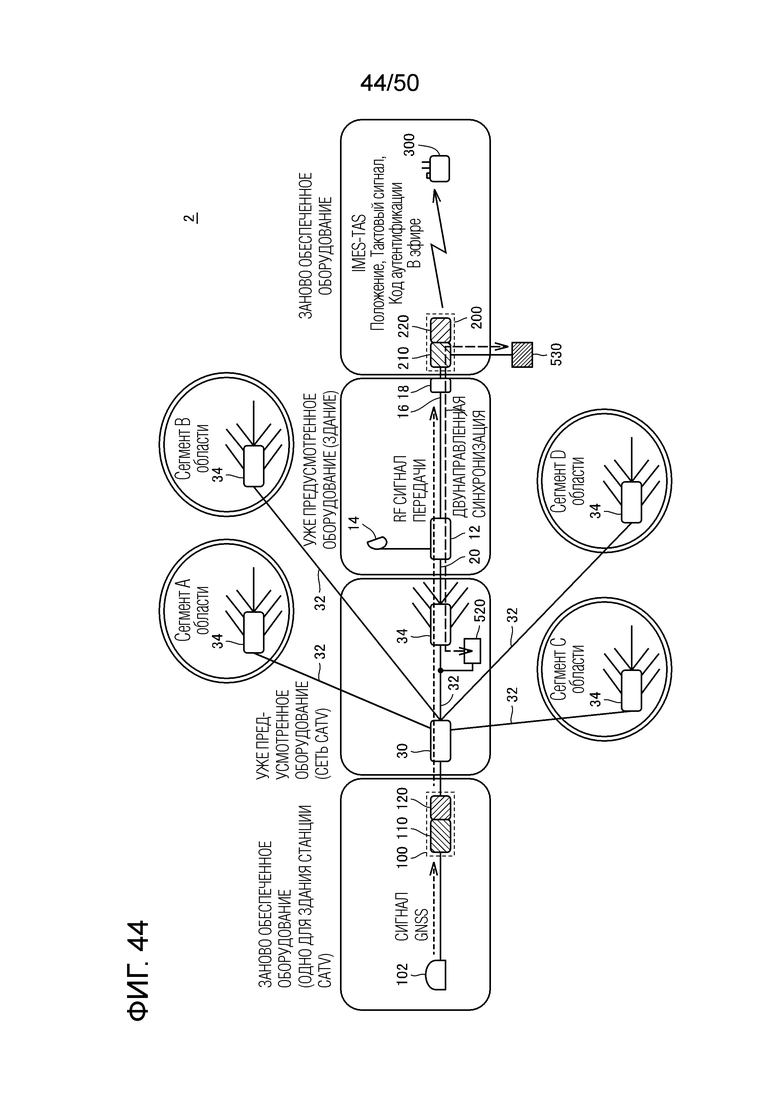
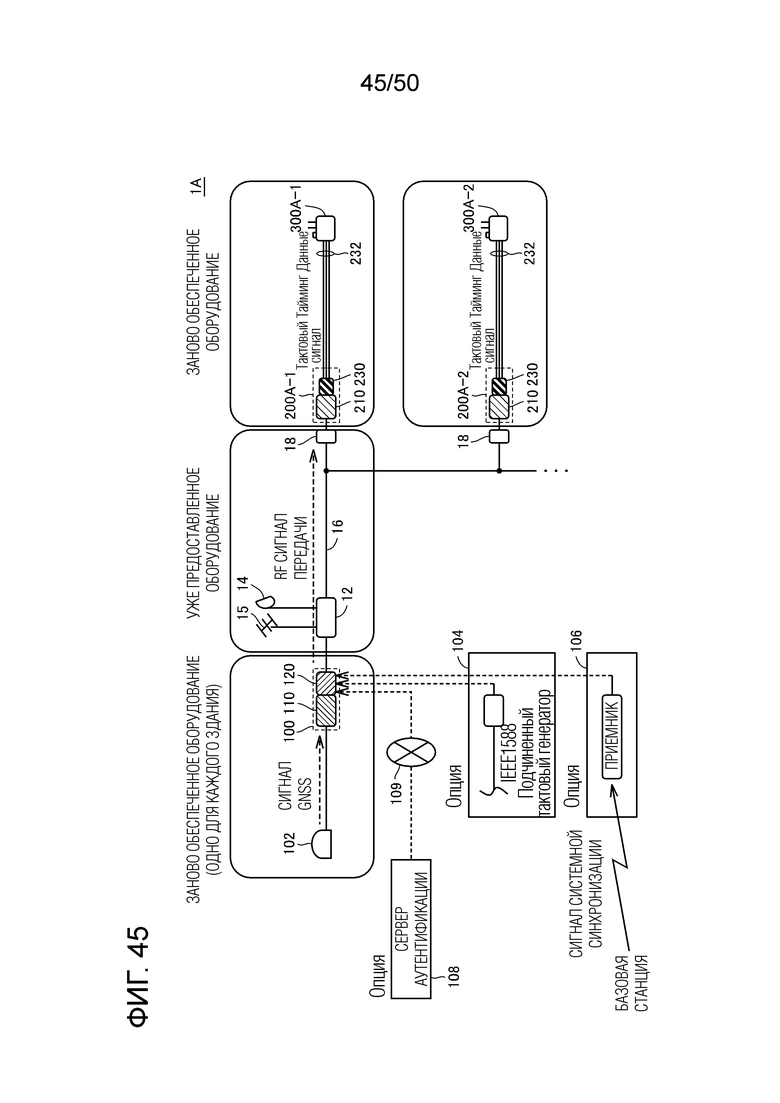
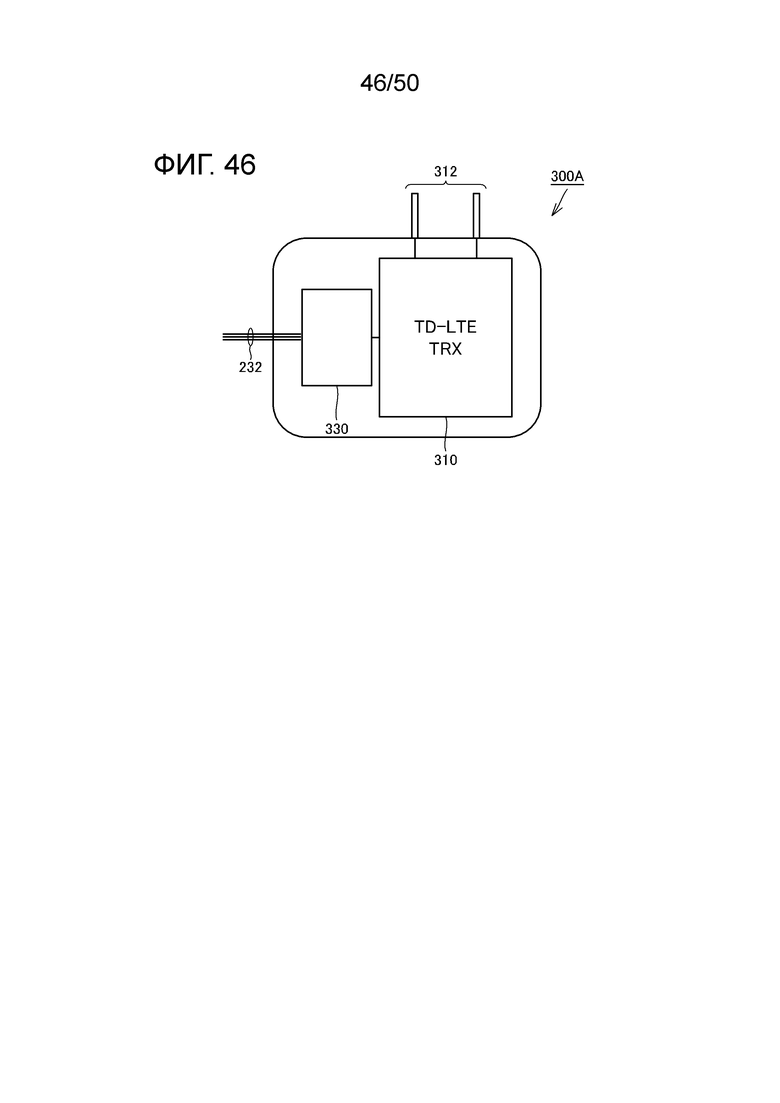
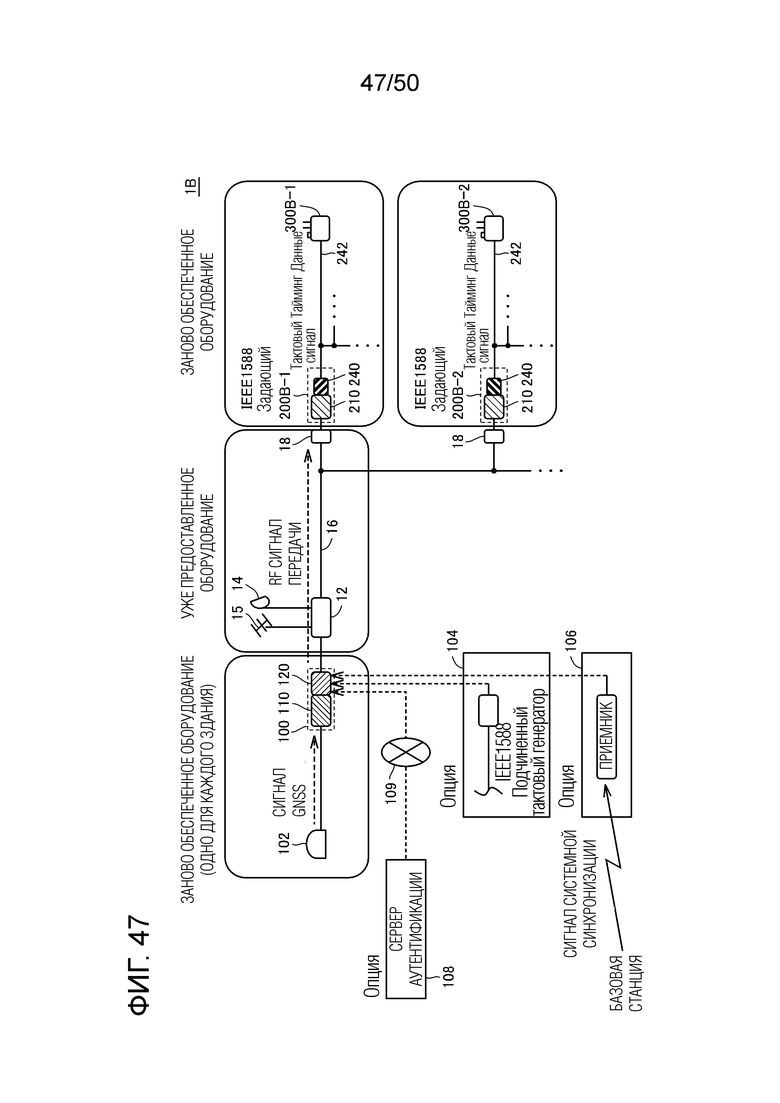
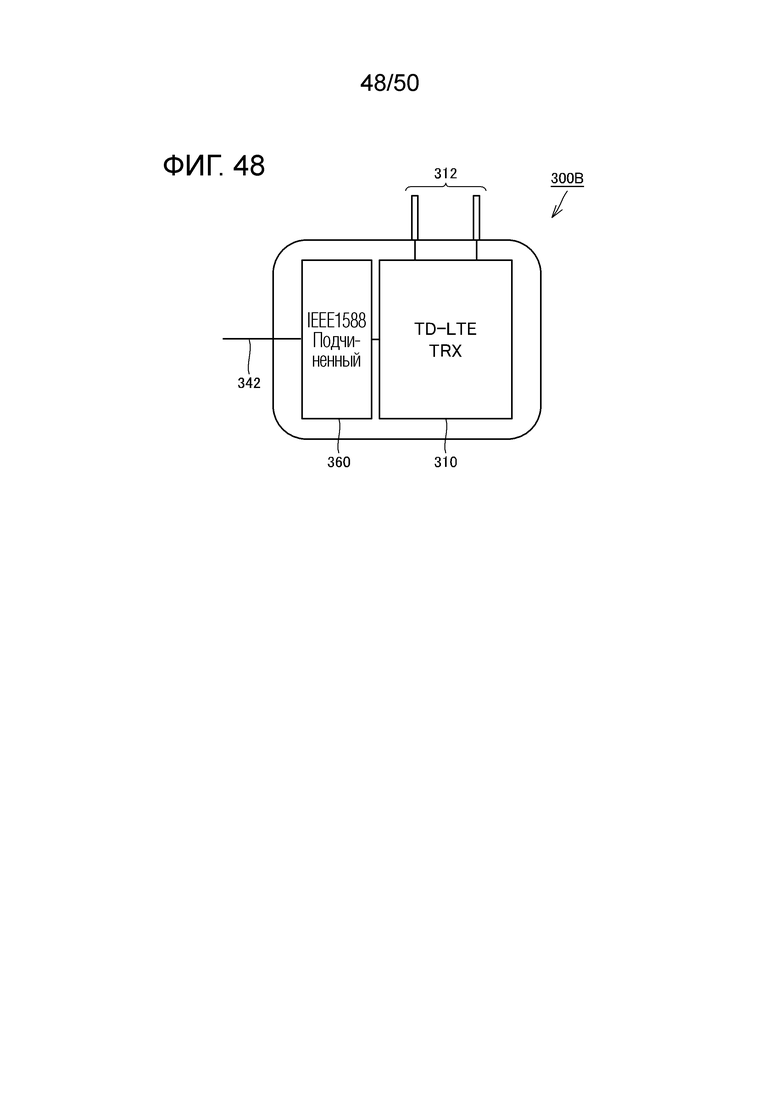
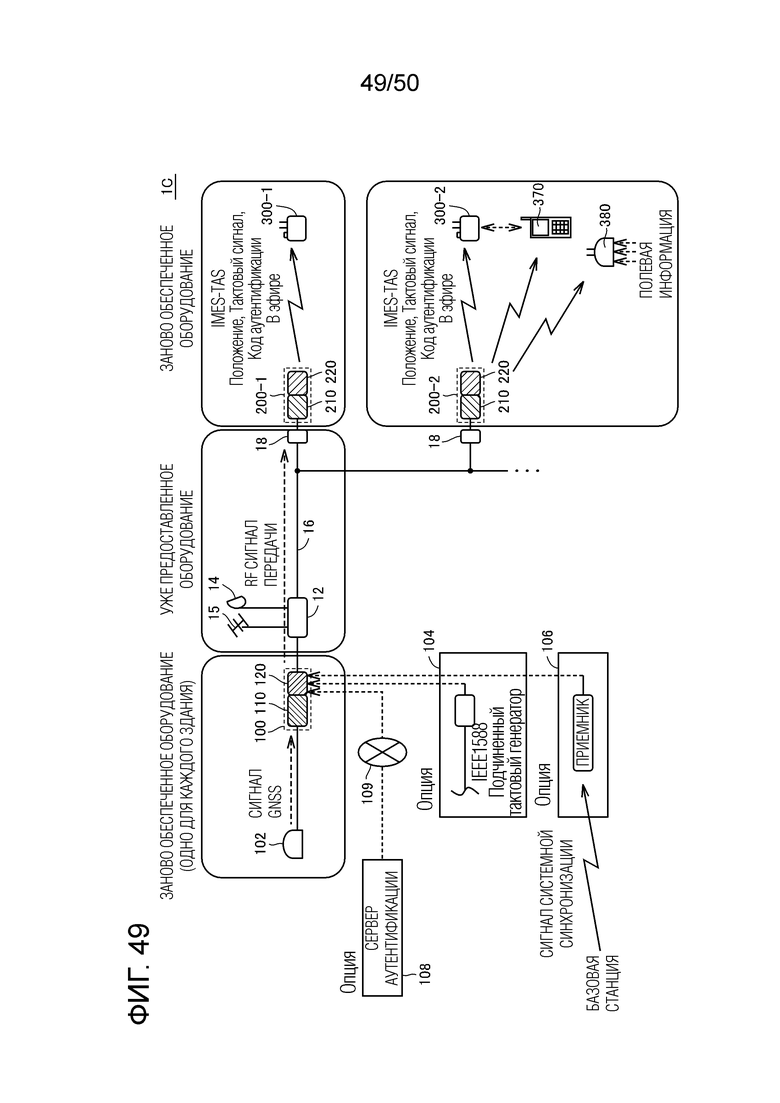
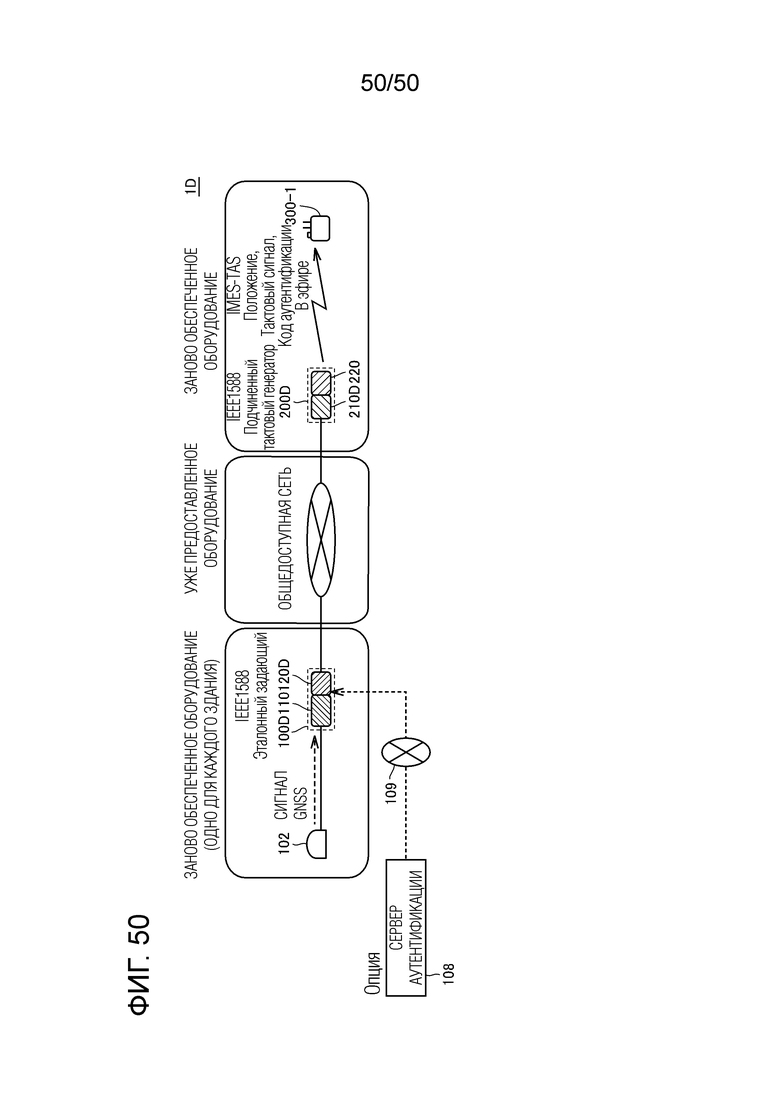
Группа изобретений относится к области временной синхронизации спутниковых систем связи. Техническим результатом является обеспечение временной синхронизации среди множества устройств, не способных принимать сигнал GNSS. Система временной синхронизации включает в себя модуль получения опорного времени, сконфигурированный, чтобы получать, на основе радиосигнала от глобальной спутниковой навигационной системы, первый сигнал тайминга и информацию времени, соответствующую таймингу, указанному первым сигналом тайминга, модулятор, соединенный с линией, разветвленной на множество ветвей, сконфигурированный, чтобы генерировать модулированный сигнал, содержащий соответствующую информацию времени в синхронизации с первым сигналом тайминга, и отправлять модулированный сигнал по линии, по меньшей мере один демодулятор, соединенный с любой ветвью линии, сконфигурированный, чтобы демодулировать модулированный сигнал, распространяющийся по линии, и по меньшей мере один передатчик, сконфигурированный, чтобы передавать первый радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы, на основе второго сигнала тайминга и информации времени, полученной посредством демодуляции любым демодулятором. 4 н. и 10 з.п. ф-лы, 50 ил.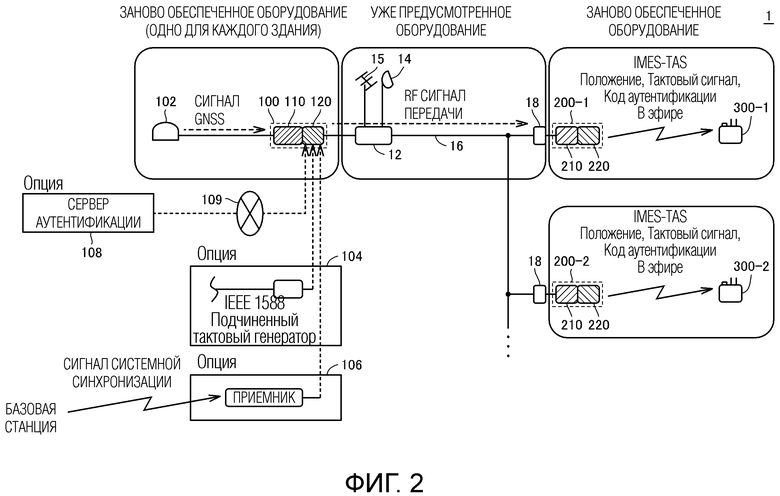
1. Система временной синхронизации для сотовой мобильной связи, содержащая:
модуль получения опорного времени, сконфигурированный, чтобы получать, на основе радиосигнала от глобальной спутниковой навигационной системы, первый сигнал тайминга и информацию времени, соответствующую таймингу, указанному первым сигналом тайминга;
модулятор, соединенный с линией, разветвленной на множество ветвей, сконфигурированный, чтобы генерировать модулированный сигнал, содержащий соответствующую информацию времени в синхронизации с первым сигналом тайминга, и отправлять модулированный сигнал по линии;
по меньшей мере один демодулятор, соединенный с любой ветвью линии, сконфигурированный, чтобы демодулировать модулированный сигнал, распространяющийся по линии; и
по меньшей мере один передатчик, сконфигурированный, чтобы передавать первый радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы, на основе второго сигнала тайминга и информации времени, полученной посредством демодуляции любым демодулятором, при этом
первый сигнал тайминга выводится периодически,
модулятор сконфигурирован, чтобы отправлять модулированный сигнал по линии с таймингом, определенным из момента времени вывода первого сигнала тайминга, в качестве опоры, и
модулированный сигнал содержит слово синхронизации в дополнение к информации времени.
2. Система временной синхронизации по п. 1, в которой
демодулятор сконфигурирован, чтобы выводить, когда демодулятор обнаруживает слово синхронизации, содержащееся в модулированном сигнале, распространяющемся по линии, информацию, следующую за обнаруженным словом синхронизации, как демодулированные данные и выводить второй сигнал тайминга с таймингом, определенным из момента времени, предшествующего моменту времени обнаружения слова синхронизации на предопределенное время коррекции, в качестве опоры.
3. Система временной синхронизации по п. 2, содержащая также устройство калибровки, сконфигурированное, чтобы получать третий сигнал тайминга, по существу идентичный первому сигналу тайминга, полученному модулем получения опорного времени, и определять время коррекции путем измерения временного интервала между третьим сигналом тайминга и вторым сигналом тайминга, выведенным из демодулятора.
4. Система временной синхронизации по п. 1, в которой
передатчик сконфигурирован, чтобы передавать первый радиосигнал с периодом дольше, чем период второго сигнала тайминга, выведенного из демодулятора.
5. Система временной синхронизации по любому одному из пп. 1-4, в которой
первый радиосигнал поддерживает по меньшей мере один из
первого формата, содержащего информацию о неделе, прошедшей с предписанного опорного дня, и полных секундах с начала недели, и
второго формата, содержащего информацию о христианском годе, месяце, дне, часе, минуте и секунде.
6. Система временной синхронизации по любому одному из пп. 1-4, в которой
первый радиосигнал сконфигурирован как кадр, состоящий из множества слов,
начальный элемент множества слов, которые составляют кадр, ассоциирован с моментом времени начала периода передачи и
первое слово в кадре зафиксировано на предопределенном значении.
7. Система временной синхронизации по п. 6, содержащая также приемник, сконфигурированный, чтобы демодулировать первый радиосигнал от передатчика для получения четвертого сигнала тайминга и информации времени, соответствующей таймингу, указанному четвертым сигналом тайминга, причем
приемник включает в себя схему, которая выполняет обработку операции свертки множество раз на первом слове.
8. Система временной синхронизации по любому одному из пп. 1-4, в которой
передатчик сконфигурирован, чтобы передавать второй радиосигнал, заменяющий радиосигнал от глобальной спутниковой навигационной системы, в то время как первый радиосигнал не передается.
9. Система временной синхронизации по любому одному из пп. 1-4, в которой
линия включает в себя по меньшей мере любую из линии сигнала общей антенной системы, линии сигнала кабельного телевидения и линии сигнала для связи.
10. Система временной синхронизации по любому одному из пп. 1-4, в которой
первый радиосигнал включает в себя сообщение предписанной длины, вычисленной на основе информации времени, полученной модулем получения опорного времени.
11. Система временной синхронизации по п. 10, в которой
сообщение предписанной длины вычисляется согласно криптографической хеш-функции с секретным ключом и информации времени, определяемой как ввод.
12. Система временной синхронизации для сотовой мобильной связи, содержащая:
модуль получения опорного времени, сконфигурированный, чтобы получать, на основе радиосигнала от глобальной спутниковой навигационной системы, первый сигнал тайминга и информацию времени, соответствующую таймингу, указанному первым сигналом тайминга; и
модулятор, соединенный с линией, разветвленной на множество ветвей, сконфигурированный, чтобы генерировать модулированный сигнал, содержащий соответствующую информацию времени в синхронизации с первым сигналом тайминга, и отправлять модулированный сигнал по линии,
по меньшей мере один терминал для соединения демодулятора, сконфигурированного, чтобы демодулировать модулированный сигнал, распространяющийся по линии, обеспечиваемой на ветви линии, при этом
первый сигнал тайминга выводится периодически,
модулятор сконфигурирован, чтобы отправлять модулированный сигнал по линии с таймингом, определенным из момента времени вывода первого сигнала тайминга, в качестве опоры, и
модулированный сигнал содержит слово синхронизации в дополнение к информации времени.
13. Устройство передачи, содержащее:
демодулятор, соединенный с любым положением в линии, разветвленной на множество ветвей, сконфигурированный, чтобы демодулировать модулированный сигнал, распространяющийся по линии, модулированный сигнал генерируется на основе первого сигнала тайминга, определенного в качестве опоры, и информации времени, соответствующей таймингу, указанному первым сигналом тайминга, и отправляется по линии в синхронизации с первым сигналом тайминга; и
передатчик, сконфигурированный, чтобы передавать радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы, на основе второго сигнала тайминга и информации времени, полученной посредством демодуляции демодулятором, при этом
первый сигнал тайминга выводится периодически,
модулятор сконфигурирован, чтобы отправлять модулированный сигнал по линии с таймингом, определенным из момента времени вывода первого сигнала тайминга, в качестве опоры, и
модулированный сигнал содержит слово синхронизации в дополнение к информации времени.
14. Устройство передачи, содержащее:
приемник, сконфигурированный, чтобы принимать модулированный сигнал, генерируемый на основе первого радиосигнала от глобальной спутниковой навигационной системы; и
передатчик, сконфигурированный, чтобы передавать второй радиосигнал, совместимый с радиосигналом от глобальной спутниковой навигационной системы, на основе сигнала тайминга и информации времени, принятой приемником,
второй радиосигнал, включающий в себя информацию положения, времени, тайминга и аутентификации, при этом
модулированный сигнал генерируется на основе опорного сигнала тайминга от глобальной спутниковой навигационной системы и информации времени, соответствующей таймингу, указанному опорным сигналом тайминга,
модулированный сигнал передается по линии с таймингом, определенным из момента времени вывода опорного сигнала тайминга, в качестве опоры, и
модулированный сигнал содержит слово синхронизации в дополнение к информации времени.
| US 2015055609 A1, 26.02.2015 | |||
| US 20050169230 A1, 04.08.2005 | |||
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ | 2005 |
|
RU2303853C2 |
| US 9261861 B2, 16.02.2016. | |||

