Предлагаемое изобретение относится к области сейсмологии и направлено на решение задач оперативного прогноза землетрясений, т.е. определения места эпицентра, интенсивности и времени (за несколько часов - сутки до предстоящего события), а также может быть использовано при геофизических исследованиях.
Актуальность проблемы оперативного прогноза землетрясений определяется тем, что на планете ежегодно происходит около 100 разрушительных землетрясений (силой более 5,5 баллов по шкале Рихтера), причем любое из них может быть катастрофическим. Очевидно, что современная сейсмология с этим не справляется, о чем свидетельствуют последствия катаклизмов, происходящих на планете почти каждую неделю. Несмотря на работу сотен сейсмических станций, размещенных в разных странах и объединенных в единые сети, за всю историю цивилизации практически никогда не было оперативного предупреждения о приближающейся катастрофе.
Одной из причин такой ситуации являются ограниченные возможности стандартной сейсмической аппаратуры, способной фиксировать лишь факт совершившегося события, тогда как прогностическая задача при этом остается не решенной [Фремд В.М. Инструментальные средства и методы регистрации сильных землетрясений. М., 1978].
В сейсмологии известны десятки предвестников землетрясений, отражающих различные физические явления в зоне предстоящего катаклизма: изменения температурных, электростатических, магнитных, гидрогеологических, геохимических и других полей. На использовании этих предвестников основаны многие из известных способов и устройств для прогнозирования землетрясений (см., например, патенты РФ №2106001, 2163385, 2170448, 2172968, 2204852, 2205432, 2227311, 2229736, 2248017).
Основные недостатки указанных изобретений состоят в невозможности их непосредственного применения из-за неадекватности измеряемых величин контролируемому процессу и их функциональной ограниченности по выделяемым параметрам. Это связано с тем, что подавляющее большинство вышеупомянутых признаков подготовки очагов землетрясений являются косвенными показателями, тогда как и теоретические расчеты, и экспериментальные данные однозначно свидетельствуют о том, что прямые признаки следует искать среди механических явлений. В настоящее время установлено, что при подготовке очага и реализации землетрясения определяющими являются механические деформационные процессы, обнаружение и отслеживание которых в прогностической задаче обеспечивает возможность использования информации о прямых признаках готовящегося катаклизма.
Некоторые из известных способов и устройств для предсказания землетрясений используют информацию о распространении низкочастотных волн от очага готовящегося катаклизма. Эта информация опирается на изменение спектральных характеристик сейсмического фона в местах установки сейсмометрической аппаратуры при механических процессах подготовки землетрясений (например, патенты-аналоги - изобретения по патентам РФ №2181205, 2170447). Однако в приведенных аналогах используется стандартная аппаратура, не обладающая частотно-селективными свойствами и содержащая в информативных сигналах помехи различного происхождения. Поэтому достоверное предсказание землетрясений этими методами практически невозможно. Кроме того, предвестники в сверхнизкочастотном диапазоне существуют ограниченное время и могут быть пропущены.
Теоретическая модель механизма подготовки землетрясений основана на дилатантной или близких к ней моделях физических явлений в очагах землетрясений. Суть ее состоит в следующем. Когда напряжения в толще тектонических пород сейсмически опасной зоны достигают предельной величины, в них появляются микротрещины, а имеющиеся полости увеличиваются. Перед землетрясением происходит возрастание пористости пород и равномерное распределение трещин по всей очаговой области и вокруг нее. За несколько часов до магистрального разрыва в очаге будущего землетрясения образуется упорядоченная (в статистическом смысле) система трещин, протяженность которой соответствует длине предстоящего разрыва. При приближении момента землетрясения система трещин переходит в предкритическое состояние (предтрещины) с падением прочности пород и под влиянием слабых внешних возмущений, а также вследствие продолжающегося процесса упорядочивания возбуждается и колеблется как единое целое, излучая сейсмическую энергию. При этом высокочастотная часть энергии поглощается в самом очаге и его окрестностях, а колебания на низких частотах в диапазоне (0,1-5)Гц распространяются по земной коре на тысячи километров. По мере возрастания критичности состояния в очаге будущего землетрясения интенсивность колебаний предтрещины увеличивается, а эмиссия сейсмической энергии ведет к дальнейшей упорядоченности системы трещин и падению прочности пород, что, в конечном счете, приводит к магистральному разрыву. Такая концепция объяснения природы оперативных предвестников полностью подтвердилась в 80-90-х гг.прошлого века наблюдениями над многочисленными катаклизмами.
Эта модель механизма подготовки землетрясений определяет методологический подход к решению прогностической проблемы и выдвигает требования к сейсмической аппаратуре откликаться на изменения интенсивности объемных упругих волн от удаленного очага. Конкретизируя эти требования, можно сформулировать прогностическую задачу, как формирование отклика на регулярный цуг упругих волн в низкочастотном спектре от далекого источника при отсутствии реакции аппаратуры, как на высокочастотные, так и низкочастотные, но кратковременные помехи от близких источников тектонического или техногенного происхождения.
Для этого сейсмическая аппаратура должна обладать частотно-избирательными свойствами, а также диаграммой направленности подобно радиолокационным антеннам. Сейсмоприемники, используемые в настоящее время и основанные на принципиальных схемах и технических средствах изготовления длиннопериодных маятников или широкополосных акселерометров, обладают векторными свойствами благодаря пространственной ориентации осей чувствительности приборов, но для решения задач оперативного прогноза землетрясений этого недостаточно, так как частотно-селективные свойства у них практически отсутствуют.
В связи с этим использование в качестве сейсмоприемника высокочувствительного гравитационного вариометра, выполненного по схеме крутильных весов Кулона первого рода, представляется радикальным способом решения проблемы, поскольку указанные требования органически соответствуют его физической природе: его сигнал обладает диаграммой направленности и частотно-избирательными свойствами. Эти свойства гравитационных вариометров при вибрациях основания обусловлены гантельным эффектом, который возникает в приборе при пространственных колебаниях крутильной системы и приводит к моменту закрутки вывешенного коромысла - рабочего тела прибора. При этом резонансное усиление маятниковых колебаний коромысла в системе подвеса определяет частотно-избирательные свойства прибора и его высокую чувствительность к тектонике очага готовящегося землетрясения. К этому следует добавить, что по чувствительности к воздействию инерционных сил тектонического происхождения гравитационные вариометры не уступают лучшим образцам приборов, используемых в сейсмологии.
Прототипом предлагаемого способа является изобретение «Способ оперативного прогноза места готовящегося землетрясения» по патенту РФ №2355000, (опубл. 10.05.2009). Определение прогностической информации здесь производится по многолепестковой (восьмилепестковой) диаграмме чувствительности каждого из пары гравитационных вариометров в составе аппаратуры сейсмической станции, которых должно быть не менее трех. Этот способ основан на измерении положения крутильной системы гравитационного вариометра относительно корпуса по азимутальной координате. При этом углы колебаний крутильной системы с гантельным коромыслом в азимуте пропорциональны величине крутящего момента коромысла относительно вертикальной оси, а диаграмма чувствительности отражает реакцию прибора на сейсмические возмущения. При изменении положения коромысла в каждом из пары приборов с помощью диаграммы чувствительности определяют направление на очаг готовящегося землетрясения от каждой сейсмической станции; по пересечению направлений находят координаты места готовящегося землетрясения.
Недостатки способа - прототипа заявленного изобретения состоят в следующем.
Диаграмма чувствительности гравитационного вариометра вследствие симметричной формы не обеспечивает однозначного решения при вычислении пеленга на очаг зарождающегося землетрясения, в результате чего получаются ложные значения пеленгов. Определение или оценка интенсивности предстоящего землетрясения здесь вообще невозможны. При этом, форма диаграммы зависит от технических параметров приборов (крутильной жесткости, коэффициентов преобразования датчиков и т.п.), что означает ее отличие от расчетной и неидентичность для разных приборов. Это приводит к погрешностям в вычислении прогностических параметров.
Кроме того, в способе-прототипе предложен пример реализации способа с помощью устаревшей конструкции гравитационного вариометра. Здесь крутильная система гравитационного вариометра содержит гантельное коромысло, вывешенное на торсионе (тонкой нити) в корпусе прибора, и датчик угла поворота крутильной системы в азимуте. Полезная прогностическая информация содержится в сигналах датчика угла. В таких конструкциях в случае высокой добротности подвеса возможны автоколебательные процессы, при которых полезная информация искажается, а ее обработка весьма затруднительна. Поэтому такие конструкции сейсмоприемников на базе гравитационного вариометра выполнены с невысокой добротностью: в примере, приведенном в описании к патенту РФ №2355000, крутильная система находится в воздушной среде. Это является существенным недостатком, поскольку от добротности подвеса крутильной системы зависит чувствительность прибора.
Современные конструкции гравитационных вариометров [см. например, патент РФ №2175773, опубл. 10.11.2001] опираются на вакуумные технологии изготовления прецизионных приборов. Прототипом предлагаемого устройства для реализации способа оперативного прогноза землетрясений выбран градиентометрический сейсмоприемник (патент РФ №2439623, опубл. 10.01.2012). Он содержит размещенное в герметичном корпусе гантельное коромысло, вывешенное в управляемом магнитном подвесе, электростатические датчики момента, управляющие движением коромысла относительно вертикальной оси по сигналам от оптических датчиков угла. Измерение полезного сигнала здесь производится с помощью автокомпенсационной схемы, формируемой датчиками угла и момента и электронными блоками, определяющими заданные частотные характеристики прибора как замкнутой системы автоматического регулирования. При этом датчики углов фиксируют положение крутильной системы относительно трех осей. Однако в данном прототипе информация о прогностических признаках содержится только в азимутальном канале в виде сигнала управления движением коромысла на входе датчика момента. Сигналы датчиков углов колебаний крутильной системы относительно горизонтальных осей здесь не используются.
Задачей предлагаемого изобретения является повышение точности и достоверности оперативного (за сутки до события) предупреждения о месте очага зарождающегося землетрясения.
Решение указанной задачи достигается способом, заключающимся в определении места зарождающегося землетрясения, основанном на использовании сигналов пары гравитационных вариометров, развернутых в азимуте друг относительно друга на угол, некратный 90 град., при их установке, по меньшей мере, на трех сейсмических станциях, с которых производят определение направлений на очаг и места их пересечения, фиксировании момента времени изменения уровня крутящего момента в каждом приборе, после чего измеряют углы колебаний крутильной системы относительно горизонтальных осей, вычисляют значения арктангенса их отношения и результирующей амплитуды угла; по усредненным значениям арктангенсов определяют направление на очаг зарождающегося землетрясения, далее, по измеренным сигналам о крутящих моментах в азимутальном контуре каждого из пары гравитационных вариометров векторным построением вычисляют уточненные направления на очаг зарождающегося землетрясения, при этом по сигналам об измеренных углах колебаний крутильной системы относительно горизонтальных осей в каждом гравитационном вариометре вычисляют коэффициент, равный отношению квадратов результирующих амплитуд углов колебаний, и с учетом этого коэффициента корректируют измеренные величины крутящих моментов в азимутальном канале.
В устройстве для реализации указанного способа в состав пары гравитационных вариометров введено вычислительное устройство, входы которого соединены с выходами датчиков углов и входами датчиков момента указанных приборов.
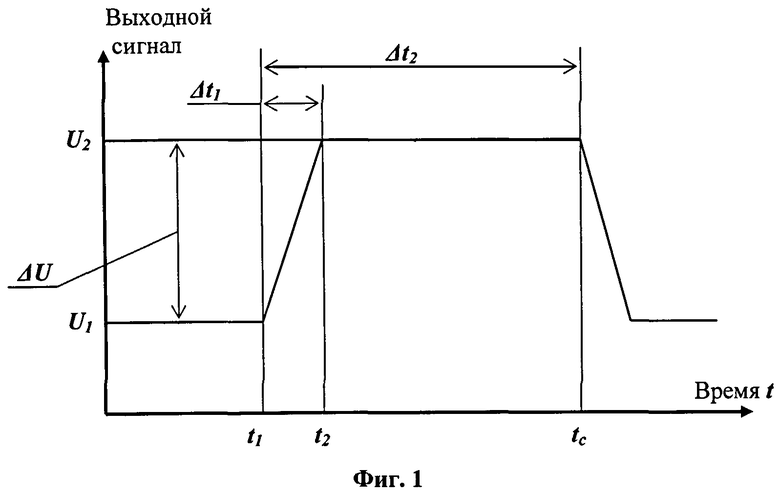
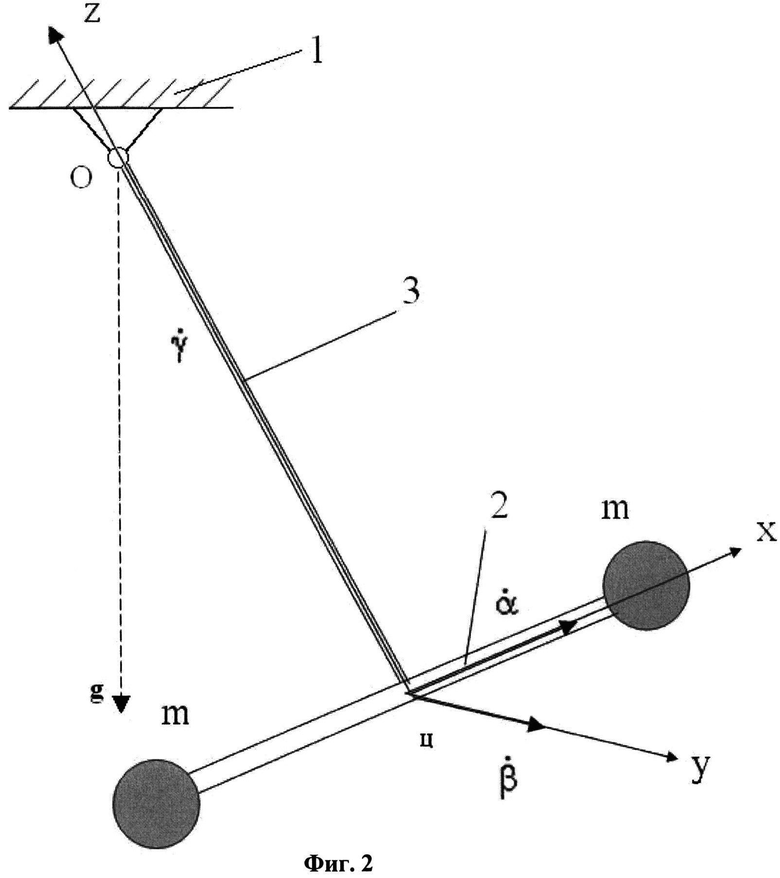
Сущность изобретения поясняется чертежами, где на фиг.1 изображена диаграмма изменения крутящего момента гравитационного вариометра при сейсмической активности, на фиг.2 - кинематическая схема крутильной системы, на фиг.3 - блок-схема устройства для вычисления направления на очаг готовящегося землетрясения.
На фиг.1, 2, 3 обозначены:
U1 - значение сигнала гравитационного вариометра до возникновения сейсмической активности;
t1 - время начала изменения крутящего момента;
U2 - установившееся значение сигнала гравитационного вариометра в момент времени t2 в результате сейсмической активности;
tc - момент землетрясения;
1 - корпус прибора;
2 - гантельное коромысло с пробными массами m на концах;
3 - несущая конструкция крутильной системы;
4 - датчики углов поворота крутильной системы α, β, γ относительно корпуса гравитационного вариометра;
5 - датчики моментов управления крутильной системы относительно вертикальной оси z;
6 - электронные блоки системы управления движением крутильной системы в азимуте;
7 - вычислительное устройство;
O - центр шарнирного подвеса коромысла в корпусе;
α, β, γ - углы поворота крутильной системы относительно корпуса;
при этом углы α, β отражают колебания крутильной системы относительно горизонтальных осей x, y; угол γ - колебания вокруг вертикальной оси; оси x, y, z - в начальном положении совпадают с главными осями инерции коромысла;
ГСП-1 и ГСП-2 - гравитационные вариометры (градиентометрические сейсмоприемники).
Пример практической реализации предлагаемого способа оперативного прогноза землетрясений.
При возникновении аномальной сейсмической активности в регионе очага предстоящего землетрясения образуется система трещин, которая за несколько десятков часов до землетрясения излучает сейсмические колебания в широком частотном диапазоне. Низкочастотные волны (0,1-5 Гц) распространяются по поверхности Земли, создавая колебания основания в месте установки приборов на сейсмической станции.
Колебания основания воспроизводятся корпусом 1 (фиг.2) прибора и возбуждают колебания коромысла 2, связанного с несущей конструкцией 3, относительно центра O шарнирного подвеса. Эти колебания фиксируются датчиками углов 4 (фиг.3), при этом датчик углов колебаний крутильной системы по азимутальной координате не только фиксирует ее положение относительно корпуса прибора, но совместно с датчиком момента 5 и электронными блоками 6 формирует замкнутую систему автоматического управления движением коромысла вокруг вертикальной оси. Эта система является устройством автоматического измерения крутящего момента (автокомпенсационная схема измерения); источником информации здесь служит сигнал на входе датчика момента.
При возникновении сейсмической активности сигнал U на входе датчика момента за интервал времени Δt1 изменяется на величину ΔU (фиг.1) и остается неизменным до момента времени tc, когда происходит землетрясение. После землетрясения сигнал возвращается на прежний уровень U1 (если не возникают афтершоки). Интервал времени Δt2 составляет несколько десятков часов (двое суток), с момента t2 до землетрясения - полтора суток, т.е. при фиксировании этого момента времени на записи сигнала гравитационного вариометра можно осуществлять прогноз времени землетрясения. Подобные процессы наблюдаются более пятнадцати лет на сейсмических станциях, на которых установлены гравитационные вариометры.
Физическая природа этого явления объясняется свойствами гравитационного вариометра откликаться на колебания основания корпуса прибора при аномальной сейсмической активности. Колебания корпуса при резонансной настройке контура физического маятника (крутильной системы с гантельным коромыслом) на одну из частот (например, 0,5 Гц) спектра сейсмических волн вызывают его вынужденные колебания с амплитудой, величина которой пропорциональна добротности контура, т.е. для углов колебаний маятника относительно главных осей инерции коромысла (горизонтальных осей) имеем выражения вида:

и соответственно для угловой скорости:

Здесь 
Δx, Δy - поступательные перемещения основания прибора в направлении главных осей инерции коромысла;
g - ускорение силы тяжести;
ζ - относительный коэффициент демпфирования резонансного контура маятника.
Поскольку Δx=A sin θ, Δy=A cos θ, то согласно (1) получим:


где A - амплитуда перемещений основания прибора с частотой резонансной настройки ωc, вызванных сейсмической активностью в зоне готовящегося землетрясения;
θ - угол между направлением цуга сейсмических волн и одной из главных осей инерции коромысла (пеленг на источник сейсмической активности), зависящий от ориентации корпуса прибора в азимуте;
P - результирующая амплитуда вынужденных колебаний маятника на резонансной частоте.
Из выражений (1) и (2) видно, что вынужденные колебания крутильной системы относительно горизонтальных осей на частоте собственных колебаний физического маятника характеризуются резонансным усилением, а формулы (3) и (4) отражают классическую вычислительную процедуру векторного построения по двум составляющим. Из этих формул следует, что по сигналам датчиков углов колебаний крутильной системы относительно горизонтальных осей согласно (3) определяется направление на источник сейсмической активности, а также информация об интенсивности колебаний основания прибора (4), отражающая сейсмическую активность источника. При этом вычисленный пеленг θ на очаг зарождающегося землетрясения согласно (3) не зависит от его интенсивности, а информация об интенсивности в виде амплитуды P вынужденных колебаний маятника на резонансной частоте не связана с ориентацией прибора в азимуте.
Поскольку эти соотношения справедливы для каждого из пары гравитационных вариометров, установленных на сейсмической станции, то результирующее значение пеленга на очаг зарождающегося землетрясения с учетом разворота приборов относительно друг друга в азимуте получим как среднее значение:

Особенность использования гравитационного вариометра в качестве сейсмоприемника основано на гантельном эффекте, который состоит в том, что при пространственных колебаниях вывешенного рабочего тела с тремя степенями свободы по угловым координатам и анизотропными свойствами тензора инерции возникают крутящие моменты вокруг осей поворота вида:

где Ωx, Ωy - угловые скорости колебаний вывешенного тела (коромысла) вокруг осей, совпадающих с его главными осями инерции х,у (в конструкциях гравитационных вариометров первого рода эти оси лежат в плоскости горизонта, а ось z направлена по вертикали);
Jx, Jy - главные моменты инерции гантельного коромысла.
Принципиальное значение здесь имеет различие главных моментов инерции (в случае симметричного тела Jx=Jy, и гантельный эффект не проявляется), но в гравитационных вариометрах это различие является органическим свойством при любой конструкции коромысла.
Согласно выражениям (2) и (6) крутящий момент вокруг вертикальной оси z получаем в виде:

Из этого выражения следует, что величина крутящего момента вокруг вертикальной оси зависит от добротности настройки контура физического маятника (относительно горизонтальных осей) и при вынужденных колебаниях крутильной системы на резонансной частоте характеризуется коэффициентом усиления гантельного эффекта в виде D2, т.е. в квадратичной форме. Это определяет более высокие частотно-селективные свойства гравитационного вариометра в отличие от сейсмографов, применяемых в современной сейсмологии. Момент Mz согласно выражению (7) содержит переменную составляющую с двойной частотой, не представляющую интереса, поскольку она достаточно эффективно подавляется в азимутальном контуре прибора. Полезная прогностическая информация здесь содержится в детектированной составляющей, которая может быть измерена различными способами подобно измерению гравитационного момента в вариометре, применяемом по прямому назначению. Ее знак и величина зависят от азимута θ и вектора A перемещения основания прибора.
Измерение момента (7) производится в системе управления движением коромысла по азимутальной координате, где выходным сигналом прибора является управляющий сигнал на входе датчика момента.
Из выражения (7) следует, что в сигнале о постоянной составляющей крутящего момента вокруг вертикальной оси содержится информация о направлении на источник колебаний основания прибора и интенсивности этих колебаний в виде:


где К - параметр, характеризующий зависимость реакции прибора от уровня сейсмической активности.
По содержанию информации о прогностических признаках этот сигнал аналогичен сигналам датчиков углов колебаний крутильной системы относительно горизонтальных осей (1), однако частотно-селективные свойства в азимутальном контуре существенно выше, чем в контуре физического маятника. Измеряемый здесь полезный сигнал значительно больше по величине и “чище”, чем сигналы об углах колебаний маятника вокруг горизонтальных осей. Поэтому методика определения прогностических признаков по измеренным сигналам в азимутальном контуре гравитационного вариометра является наиболее точной.
Тот недостаток формы сигнала, что в ней отражается одно уравнение с двумя неизвестными (К, θ), устраняется наличием второго, идентичного прибора, корпус которого развернут в азимуте на известный угол, не кратный прямому углу. В этом случае решение задачи очевидно, так как второй прибор, развернутый в азимуте на известный угол, дает недостающее уравнение:

где φ0 - угол разворота в азимуте второго прибора относительно первого.
При φ0=45° решение прогностической задачи очевидно по аналогии с выражениями (3) и (4), где векторным построением вычисляется пеленг на очаг зарождающегося землетрясения и его интенсивность по сигналам датчиков углов колебаний крутильной системы относительно горизонтальных осей.
Таким образом, по сигналам схемы измерения крутящих моментов в азимутальном контуре управления движением коромысла каждого из пары гравитационных вариометров вычисляются направление на очаг зарождающегося землетрясения.
Однако условие идентичности приборов означает идентичность их метрологических характеристик при измерении крутящего момента Mz (7). Основное значение как метрологические коэффициенты здесь имеют параметры автокомпенсационной схемы измерения сигналов в азимутальной координате и добротность резонансной настройки горизонтальных каналов. По этим свойствам разные образцы приборов могут существенно различаться ввиду конструкторско-технологических несовершенств при их изготовлении. Например, различие в крутизне датчиков момента определяется допусками на величину зазора между статорными и роторными электродами, который формируется в результате ряда последовательных операций технологического цикла. Добротность резонансной настройки зависит от степени вакуумирования камеры прибора с крутильной системой, но вакуум зависит от соблюдения технологической дисциплины в процессе изготовления и от газовыделения деталей. Хотя эти параметры могут быть определены при регулировке, гарантировать их неизменность во времени при эксплуатации приборов затруднительно. Поэтому предлагается производить операции по «уравниванию» коэффициентов выражения (9), используя информацию об углах колебаний крутильных систем приборов относительно горизонтальных осей, которые фиксируются соответствующими датчиками.
В идеальном случае амплитуды вынужденных колебаний маятников для обоих приборов одинаковы и согласно выражению (4) не зависят от их разворота в азимуте. Различие параметров приборов здесь определяется главным образом величиной добротности резонансной настройки, то есть согласно формуле (9):

Но из (4) следует:

С учетом формулы (9) в результате сравнения квадратов результирующих амплитуд углов вынужденных маятниковых колебаний крутильной системы относительно горизонтальных осей, вычисленных для каждого из пары приборов, получим коэффициент для уравнивания сигналов в азимутальных контурах измерения крутящих моментов:
Признаком неидентичности приборов является отличие этого коэффициента от единицы. В этом случае с помощью этого коэффициента корректируются измеренные сигналы о величине крутящих моментов - выражения (10), и дальнейшая процедура определения прогностических признаков по сигналам пары гравитационных вариометров не вызывает трудностей. Следует отметить, что величина этого коэффициента не зависит как от ориентации приборов в азимуте, так и от уровня сейсмической активности.
Предложенный способ обеспечивает повышение точности и достоверности оперативного (за сутки до события) предупреждения о месте очага зарождающегося землетрясения и может быть реализован в заявляемом устройстве, поэтому все существенные признаки формулы изобретения находятся в единстве и в совокупности направлены на решение конкретной задачи.
Таким образом, предлагаемое изобретение позволяет оперативно определить место зарождающегося землетрясения и оповестить о землетрясении за сутки до события с указанием координат места очага.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА МЕСТА ГОТОВЯЩЕГОСЯ ЗЕМЛЕТРЯСЕНИЯ | 2007 |
|
RU2355000C1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗИРОВАНИЯ КООРДИНАТ ГИПОЦЕНТРА ЗЕМЛЕТРЯСЕНИЯ | 2018 |
|
RU2677837C1 |
| Гравитационный вариометр | 1977 |
|
SU693325A1 |
| Способ краткосрочного определения подготовки сильного сейсмического события | 2022 |
|
RU2805275C1 |
| БИОСЕКРЕТ | 1994 |
|
RU2133048C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЯ | 2012 |
|
RU2490675C1 |
| Гравитационный вариометр | 1983 |
|
SU1115001A1 |
| Гравитационный вариометр | 1976 |
|
SU557341A1 |
Изобретение относится к области сейсмологии и может быть использовано для оперативного определения места очага зарождающегося землетрясения. Сущность: устанавливают пары гравитационных вариометров, развернутых в азимуте друг относительно друга на угол, некратный 90˚. Причем пары вариометров устанавливают как минимум на трех сейсмических станциях, с которых определяют направления на очаг землетрясения и места пересечения этих направлений. Фиксируют момент времени изменения уровня крутящего момента в каждом вариометре. При изменении уровня крутящего момента в каждом вариометре измеряют углы колебаний крутильной системы относительно горизонтальных осей. Вычисляют значения арктангенса их отношения и результирующей амплитуды угла. По усредненному значению арктангенса определяют направление на очаг зарождающегося землетрясения. Устройство для реализации данного способа содержит в каждом гравитационном вариометре крутильную систему с гантельным коромыслом, датчиками (4) углов ее колебаний относительно трех осей и датчиками (5) момента системы измерения крутящего момента относительно вертикальной оси. Кроме того, в состав каждой пары гравитационных вариометров введено вычислительное устройство (7). Выходы вычислительного устройства (7) соединены с выходами датчиков (4) углов и входами датчиков (5) момента гравитационных вариометров. Технический результат: повышение точности оперативного предупреждения о месте очага зарождающегося землетрясения. 2 н.п.ф-лы, 2 з.п.ф-лы, 3 ил.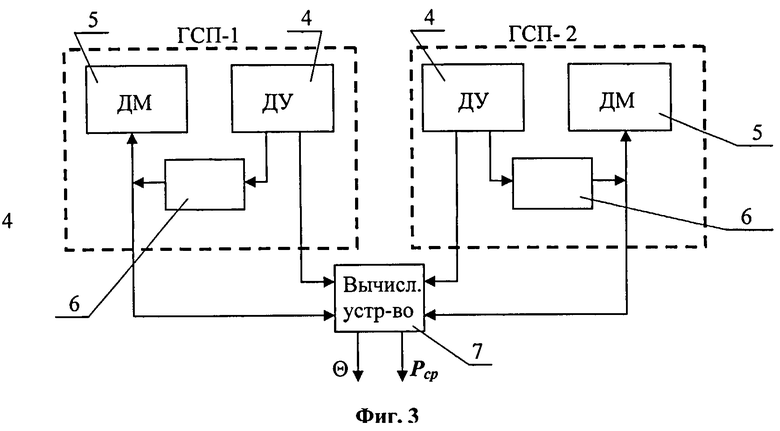
1. Способ оперативного определения места очага зарождающегося землетрясения, основанный на использовании сигналов пары гравитационных вариометров, развернутых в азимуте друг относительно друга на угол, некратный 90°, при установке каждой пары вариометров по меньшей мере на трех сейсмических станциях, с которых производят определение направлений на очаг землетрясения и места пересечения этих направлений и фиксирование момента времени изменения уровня крутящего момента в каждом вариометре, отличающийся тем, что при изменении уровня крутящего момента в каждом вариометре измеряют углы колебаний крутильной системы относительно горизонтальных осей, вычисляют значения арктангенса их отношения и результирующей амплитуды угла, по усредненному значению арктангенса определяют направление на очаг зарождающегося землетрясения.
2. Способ оперативного определения места очага зарождающегося землетрясения по п.1, отличающийся тем, что направление на очаг зарождающегося землетрясения вычисляют векторным построением по сигналам об измеренных крутящих моментах в каждом из пары гравитационных вариометров.
3. Способ оперативного определения места очага зарождающегося землетрясения по п.1 или п.2, отличающийся тем, что по сигналам об измеренных углах колебаний крутильной системы относительно горизонтальных осей в каждом гравитационном вариометре вычисляют коэффициент, равный отношению квадратов результирующих амплитуд углов колебаний, и с учетом этого коэффициента корректируют измеренные величины крутящих моментов в азимутальном канале.
4. Устройство для оперативного определения места очага зарождающегося землетрясения, реализующее способ по п.п.1-3, содержащее в каждом гравитационном вариометре крутильную систему с гантельным коромыслом, датчиками углов ее колебаний относительно трех осей и датчиками момента системы измерения крутящего момента относительно вертикальной оси, отличающееся тем, что в состав каждой пары гравитационных вариометров введено вычислительное устройство, входы которого соединены с выходами датчиков углов и входами датчиков момента гравитационных вариометров.
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА МЕСТА ГОТОВЯЩЕГОСЯ ЗЕМЛЕТРЯСЕНИЯ | 2007 |
|
RU2355000C1 |
| Вольфсон Г.Б., Малеев П.И | |||
| Физико-технические предпосылки создания гравиградиентометрического сейсмоприемника для оперативного прогноза землетрясений | |||
| - Навигация и гидрография, 2009, №28, с.72-82 | |||
| Вольфсон Г.Б | |||
| и др | |||
| Градиентометрический сейсмоприемник с магнитным подвесом в задачах оперативного прогноза | |||

