Изобретение относится к разделу геофизике, занимающемуся микромагнитной и микрогравитационной разведкой, и может быть использовано в нефтяной и газовой промышленности, а также в коммунальном хозяйстве для определения координат и состояния элементов подземной транспортной коммуникации.
Известен способ совместной интерпретации магнитометрических и гравиметрических данных, когда магнитометрические данные рассматриваются совместно с гравиметрическими ввиду большой общности теории магнитного и гравитационного полей. Вычисляются псевдогравитационные аномалии, представляющие собой вертикальные производные гравитационного потенциала, вычисленные на основании соотношения Пуассона по данным распределения магнитного поля (Z или ΔT) на плоскости измерений.
Псевдомагнитные аномалии - это производные магнитного потенциала, вычисленные на той же основе по распределению поля силы тяжести.
Сопоставление псевдогравитационных и псевдомагнитных аномалий с соответствующими наблюденными полями позволяет более точно установить природу возмущающих объектов.
Если псевдоаномалии и реальные аномалии совпадают, то магнитное и гравитационное поля обусловлены одними и теми же причинами.
Недостатком такого способа является большая трудоемкость при сборе полевых данных и математической обработке полученных результатов, а также малая оперативность при определении координат объектов с заранее известными формой, размерами и физическими свойствами.
Известен способ "биофизического эффекта" (Авторское свидетельство 805224 1981 г., G 01 V 3/00), при котором плановые контуры отыскиваемого подземного объекта определяются при пешеходной геофизической съемке по динамике угла поворота в одной или двух руках оператора свежесрезанной деревянной ветки или горизонтальной металлической рамки.
За единицу измерения при движении оператора по исследуемому участку принимается количество шагов на один поворот рамки или промежуток времени на один оборот (при движении на транспорте).
При этом фиксируются точки и линии перемены знака вращения рамки и составляются карты изолинии БЛЭ, а по ним определяются координаты и размеры залегающего объекта.
Недостатком этого способа является невозможность детальной локализации объектов сравнительно малых размеров и неопределенность в интерпретации природы физических процессов, лежащих в основе "биофизического эффекта", а также отсутствие данных об углах поворота рамки, полученных при неподвижном состоянии оператора относительно точки на местности.
Для определения направления градиента горизонтальной составляющей магнитного поля можно также использовать магнитометр С-15 на кварцевом подвесе, предназначенный для высокоточных измерений горизонтальной составляющей H земли - земного магнитного поля и магнитного склонения D.
Чувствительной частью является постоянный магнит, свободно подвешенный в горизонтальном положении на вертикальной кварцевой нити.
Абсолютное значение горизонтальной составляющей земного магнитного поля определяется путем закручивания кварцевой нити с магнитом сначала в одну сторону, затем в другую и сравнением углов отклонения магнита от плоскости магнитного меридиана (положение свободного равновесия при раскрученной нити).
Недостатком такого устройства является большая трудоемкость в сборе полевых данных и математической их обработке для получения плановой картины градиента горизонтального магнитного поля, малая оперативность и невозможность параллельной фиксации направления градиента горизонтальной составляющей поля силы тяжести этим же устройством.
Для измерения вторых производных силы тяжести применяются гравитационные вариометры и градиентометры, например гравитационный горизонтальный градиентометр Vxz, или градиентометр ГРБМ-2.
В гравитационном вариометре фиксируются положения равновесия (ni) крутильных систем при нескольких ориентациях прибора. По измеренным значениям (ni) вычисляются вторые производные по формулам, выражающим связь между полем силы тяжести, параметрами прибора и его ориентировкой в пространстве.
Недостатком такого устройства является большая трудоемкость в сборе полевых данных и математической их обработке для получения плановой картины градиента горизонтального гравитационного поля, малая оперативность и невозможность параллельной фиксации направления градиента горизонтальной составляющей магнитного поля Земли.
Наиболее близким по технической сущности является устройство для геомагнитной разведки (Авторское свидетельство N 805224, 1981 г., G 01 V 3/00), представляющее собой рамку, удерживаемую в руках оператора, с боковыми сторонами из меди и стали, замкнутыми между собой через контур настройки. С помощью рамки при движении оператора производится подсчет числа шагов на один поворот, причем поворотом считается переход рамки из верхнего наклонного положения в нижнее, а возвращение в исходное положение каждый раз осуществляется самим оператором.
Недостатком устройства является невозможность раздельного учета факторов, воздействующих на показания устройства, таких как полный вектор как магнитного, так и гравитационного поля Земли и оператора, электромагнитные нестационарные излучения контура настройки и необходимость часто приводит устройство в исходное состояние, что приводит к увеличению субъективного фактора в результаты измерения, причем от оператора требуются специфические приемы и навыки, препятствующие широкому применению устройства.
Техническим результатом изобретения является упрощение устройства для одновременной фиксации азимутов градиентов горизонтального магнитного и гравитационного полей с разделением факторов оператора и внешнего поля, повышение информативности и удобств в пользовании устройства.
Поставленный технический результат достигается тем, что чувствительная часть предлагаемого устройства реагирует как на градиенты горизонтального магнитного поля, так и на градиенты горизонтального гравитационного поля.
Устройство для геомагнитной разведки состоит из горизонтального коромысла с двумя уравновешивающими грузиками на концах, подвешенного на тонкой нерастяжимой нити, причем грузики выполнены из магнетиков с противоположными знаками коэффициента магнитной восприимчивости.
По характеру распределения величины и знака азимута градиента относительно направления пути следования определяются плановые координаты линий характерных точек магнитных и гравитационных аномалий, а по плановой картине векторного поля этих градиентов определяются координаты коммуникации, направление движения транспортируемой среды и координаты мест скрытых аварий.
На фиг. 1 изображены графики распределения аномалий магнитного и гравитационного полей над круговым горизонтальным цилиндром бесконечного простирания вдоль оси Y вкрест простирания.
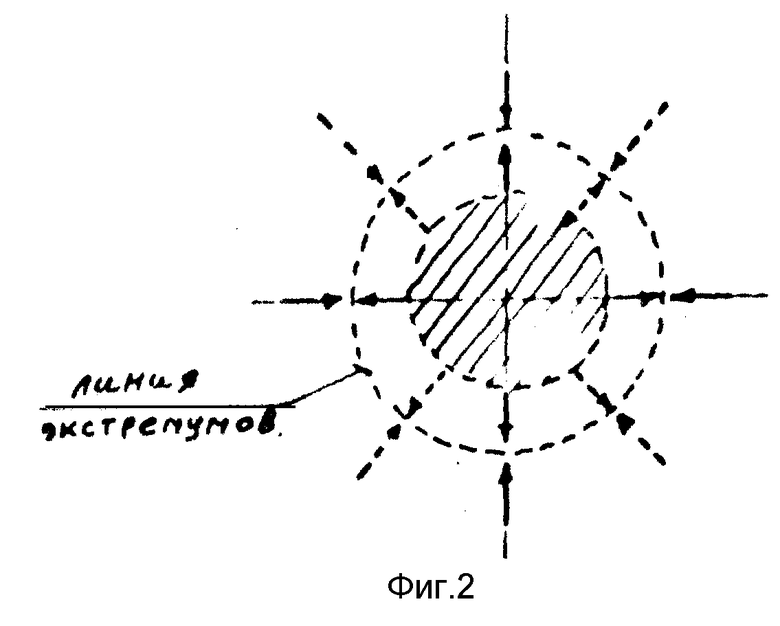
На фиг. 2 изображена плановая картина векторного поля аномалии горизонтально составляющей напряженности магнитного и гравитационного полей и их градиентов над крышкой колодца.
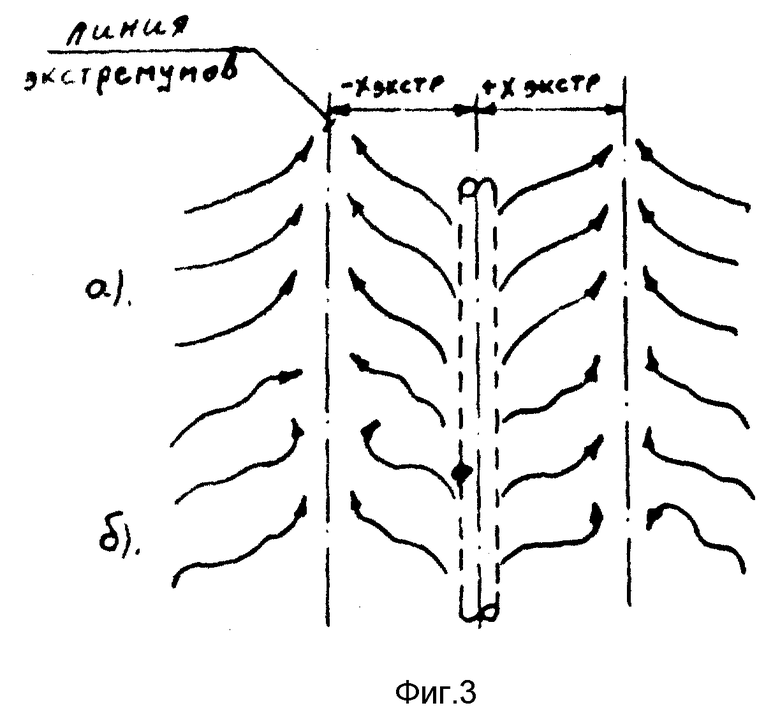
На фиг. 3 изображена плановая картина векторного поля градиентов над действующей коммуникацией.
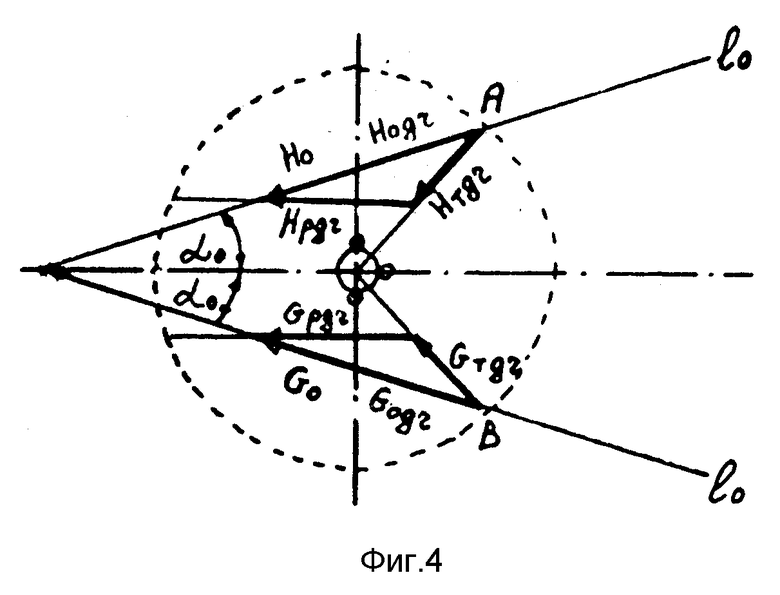
На фиг. 4 изображена плановая картина напряженностей и их градиентов магнитного и гравитационного полей оператора в равномерном и стационарном внешнем поле.
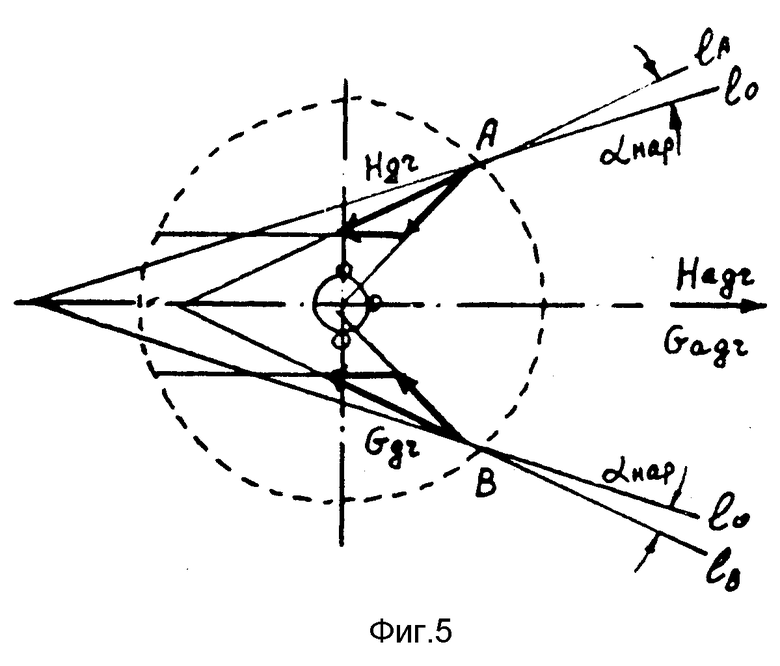
На фиг. 5 изображены повороты линии градиентов "наружу" при внешних градиентах, направленных "от оператора".
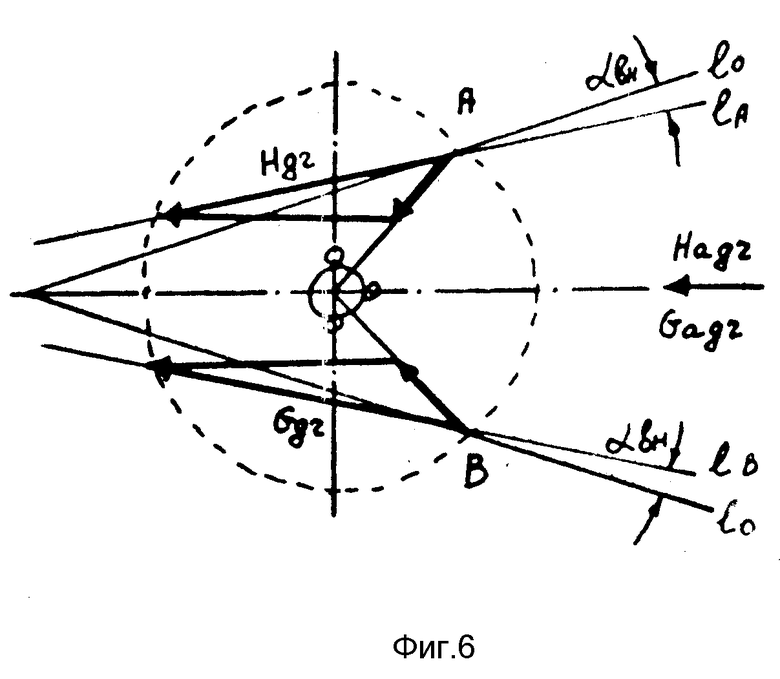
На фиг. 6 изображены повороты линий градиентов "внутрь" при внешних градиентах, направленных "к оператору".
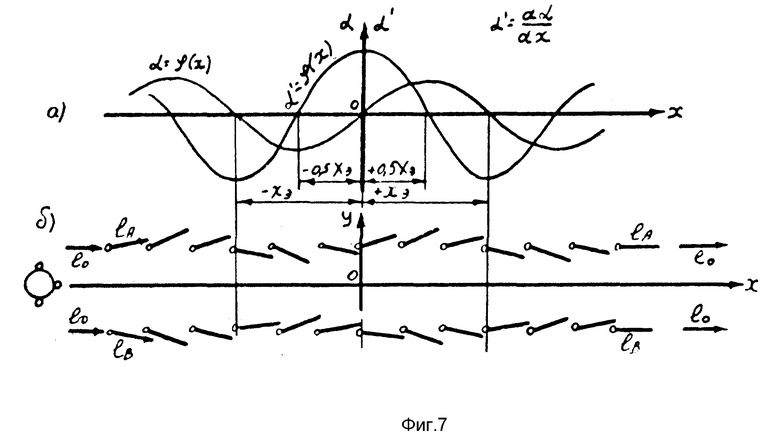
На фиг. 7 изображен характер изменения углов поворота (α) линии градиентов в левой и правой руках оператора при следовании вкрест простирания слева направо.
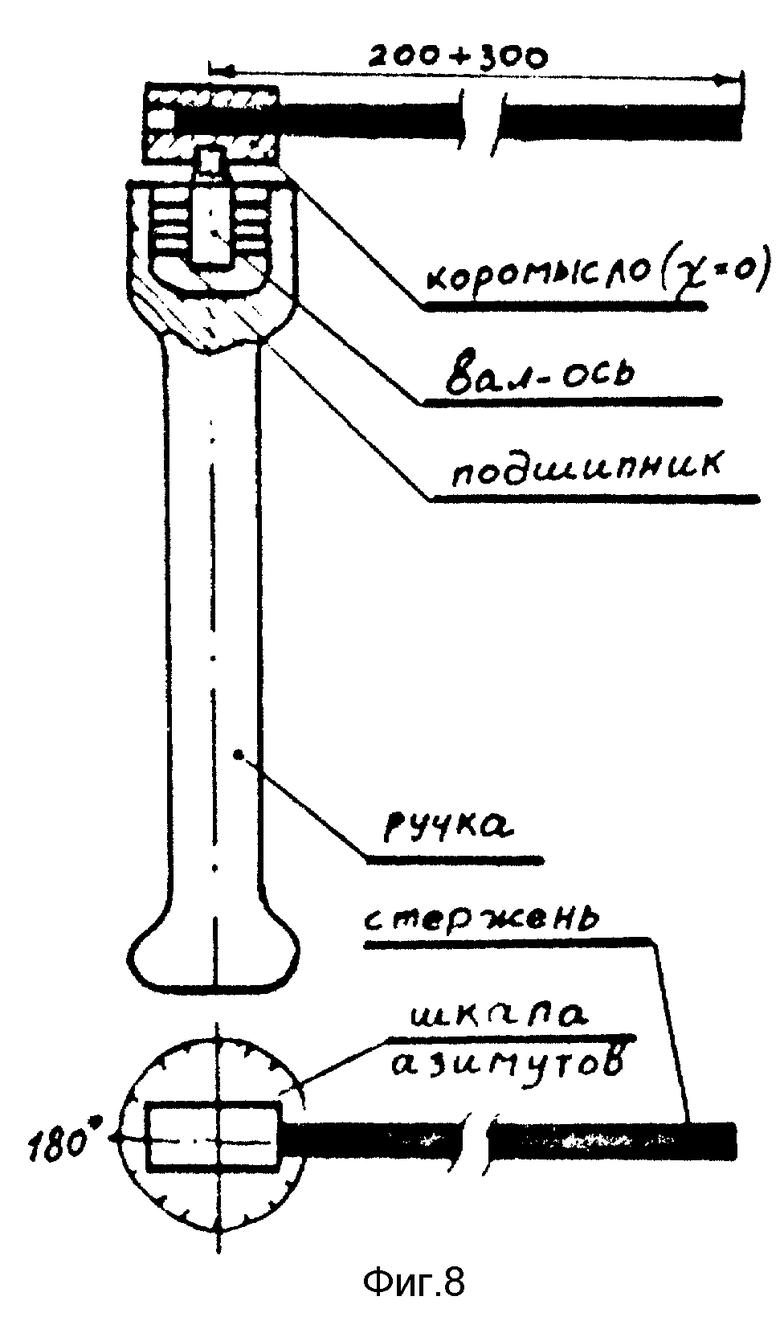
На фиг. 8 изображен переносный градиентометр азимутальный в рабочем положении.
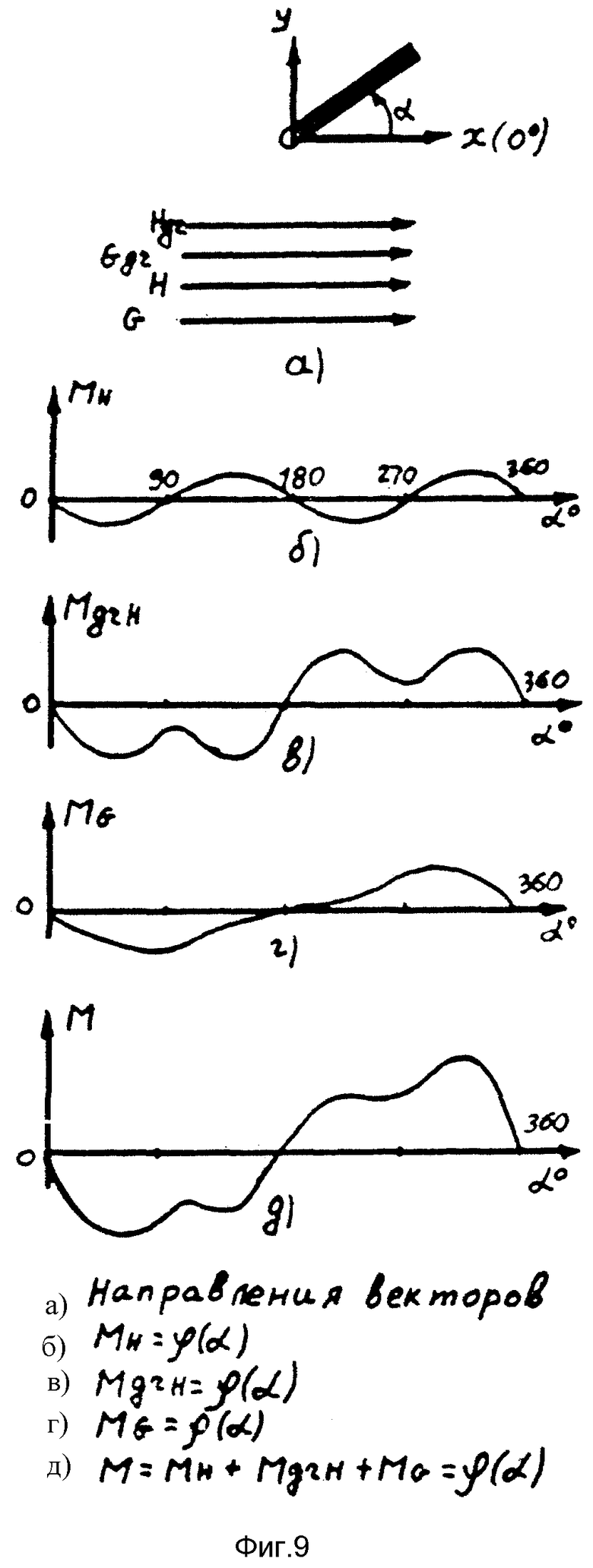
На фиг. 9 изображены графики моментов сил, ориентирующих в пространстве свободный конец стержня, при совпадающих направлениях напряженностей и их градиентов.
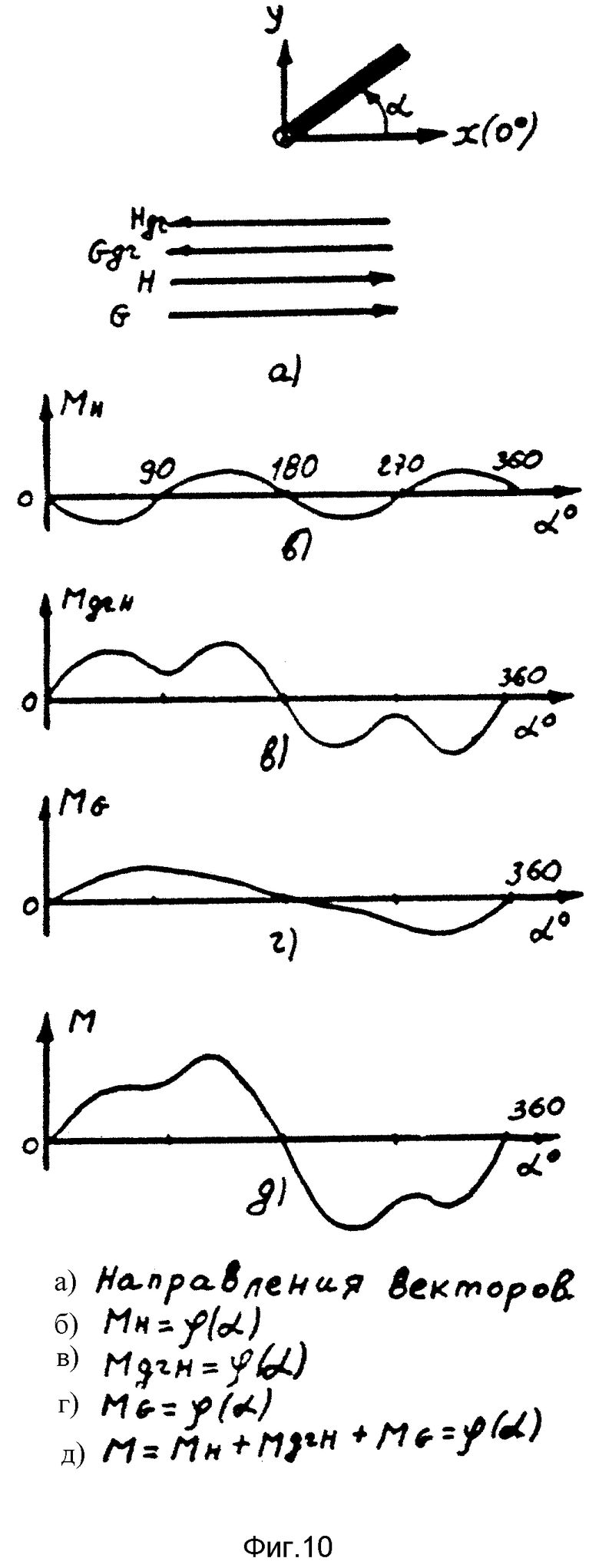
На фиг. 10 изображены графики моментов сил, ориентирующих в пространстве свободный конец стержня при противоположных направлениях напряженностей и их градиентов.
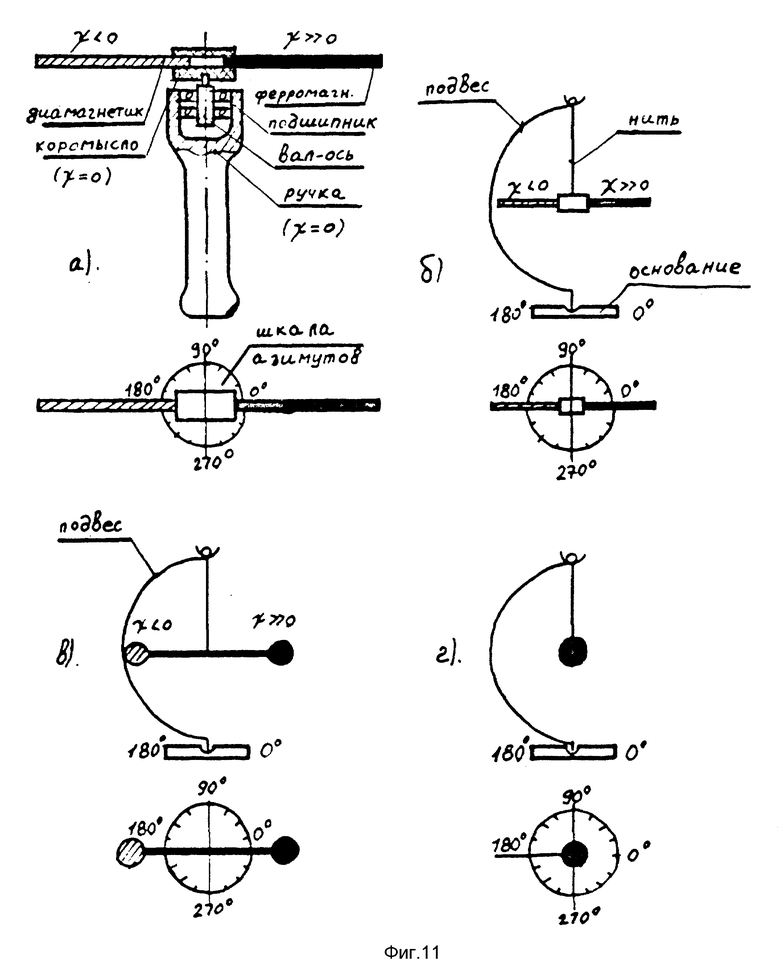
На фиг. 11 изображен градиентометр азимутальный стационарный в рабочем состоянии.
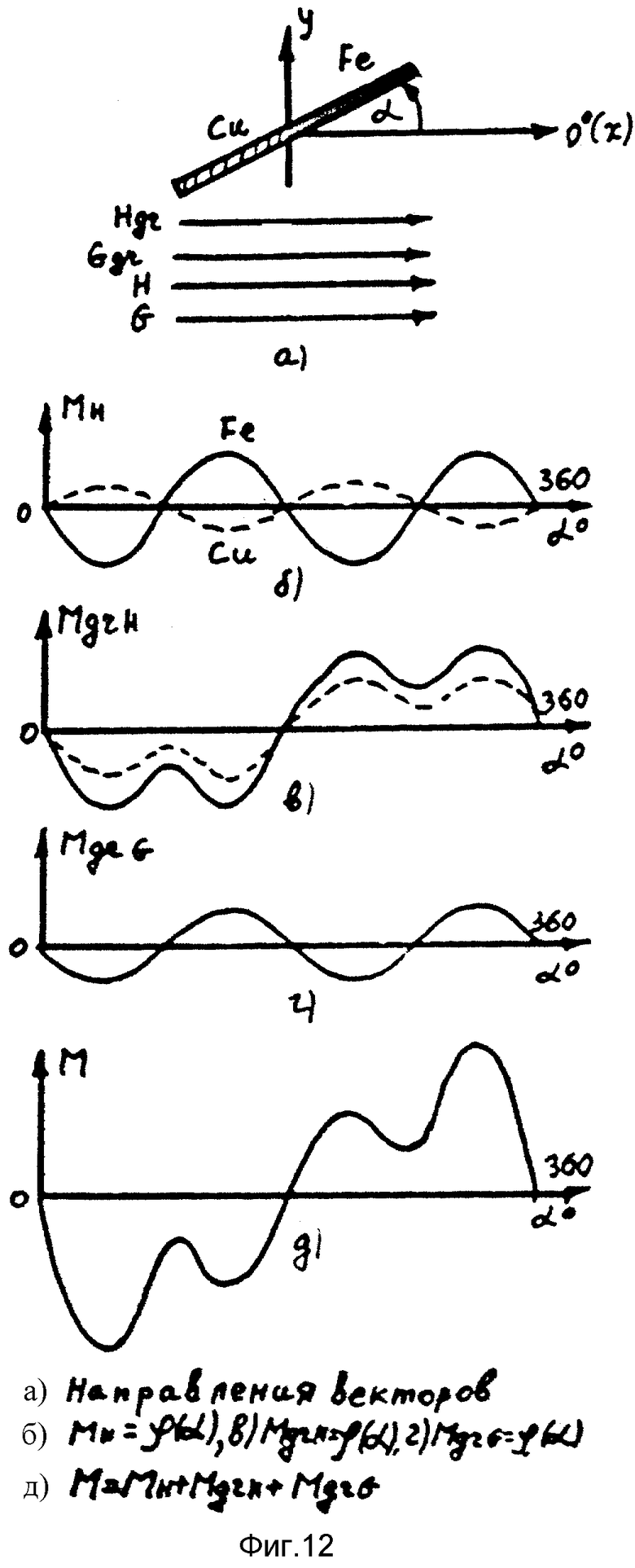
На фиг. 12 изображены графики моментов сил, ориентирующих составной стержень при совпадающих направлениях напряженностей и их градиентов.
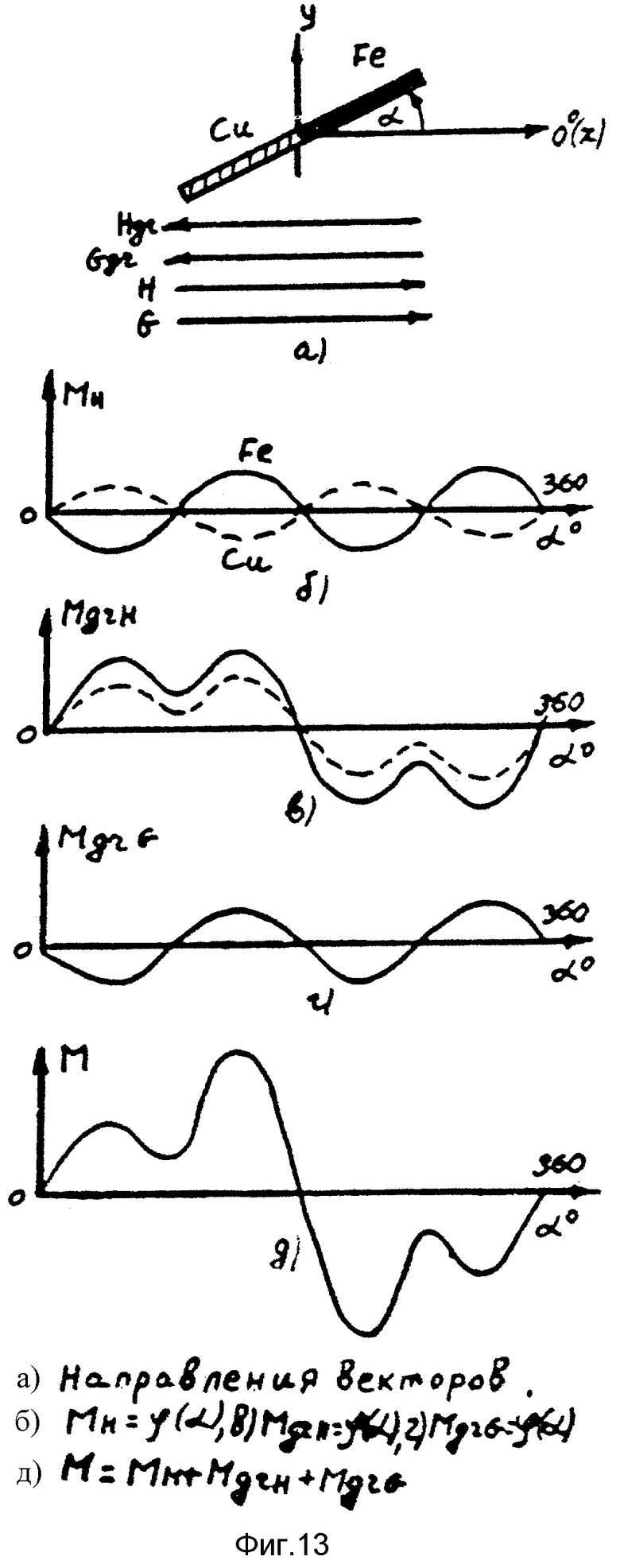
На фиг. 13 изображены графики моментов сил, ориентирующих составной стержень при противоположных направлениях напряженностей и их градиентов.
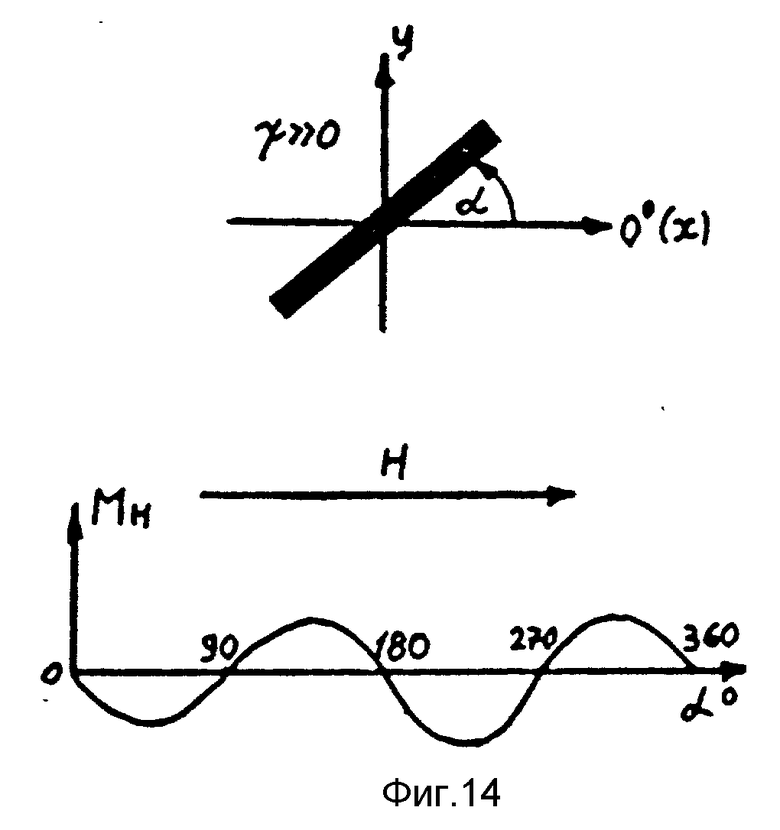
На фиг. 14 изображена ориентация свободно подвешенного горизонтального стержня из парамагнетика (χ > 0) вдоль линии магнитного поля.
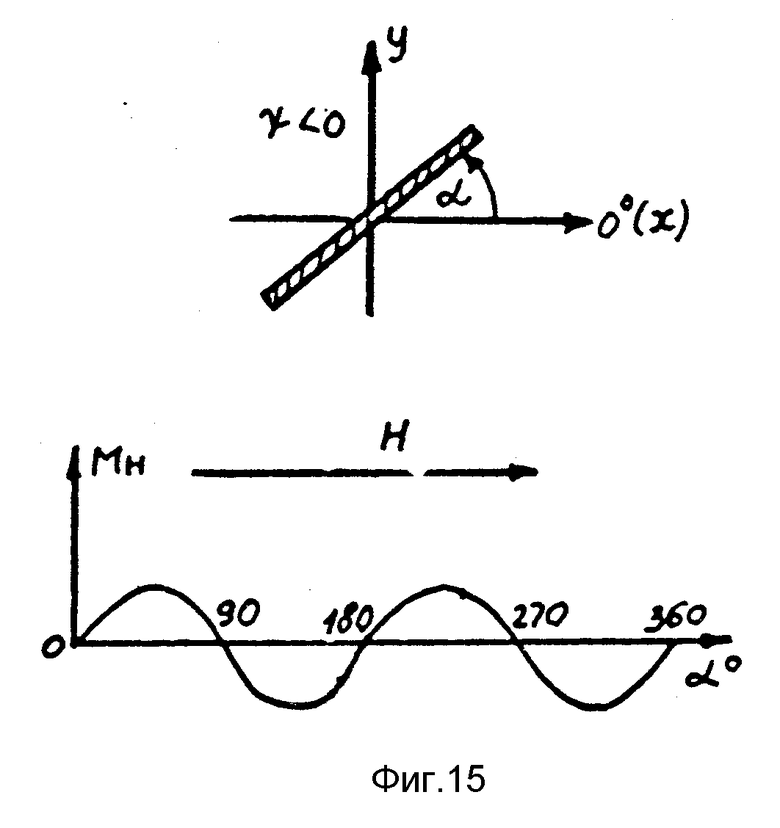
На фиг. 15 изображена ориентация свободно подвешенного горизонтального стержня из диамагнетика (χ < 0) поперек линий магнитного поля.
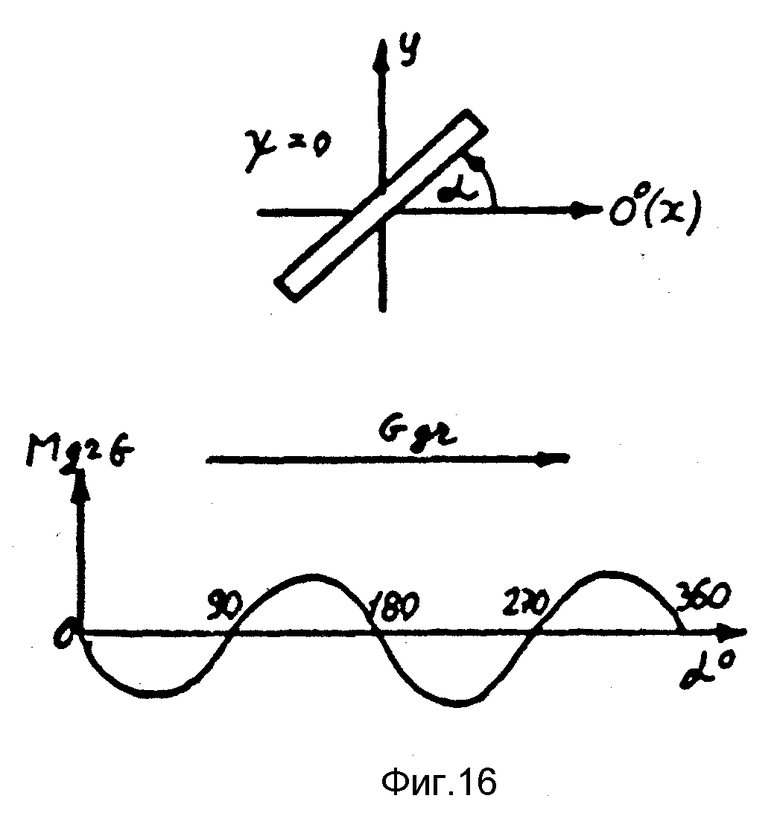
На фиг. 16 изображена ориентация свободно подвешенного стержня из магнитонейтрального материала (χ = 0) в неравномерном поле гравитации.
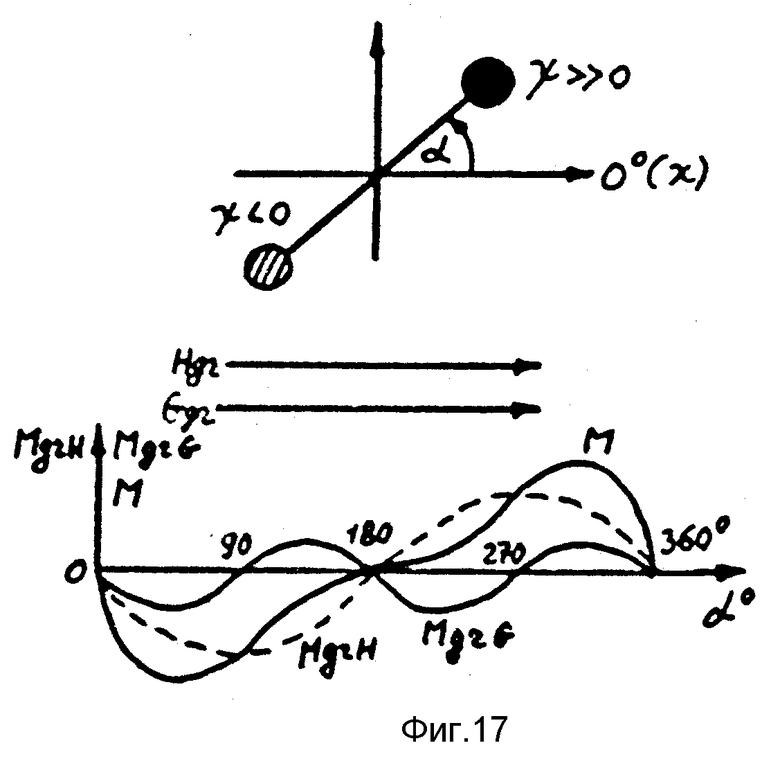
На фиг. 17 изображена ориентация свободно подвешенного горизонтального коромысла с уравновешенными грузами из парамагнетика и диамагнетика.
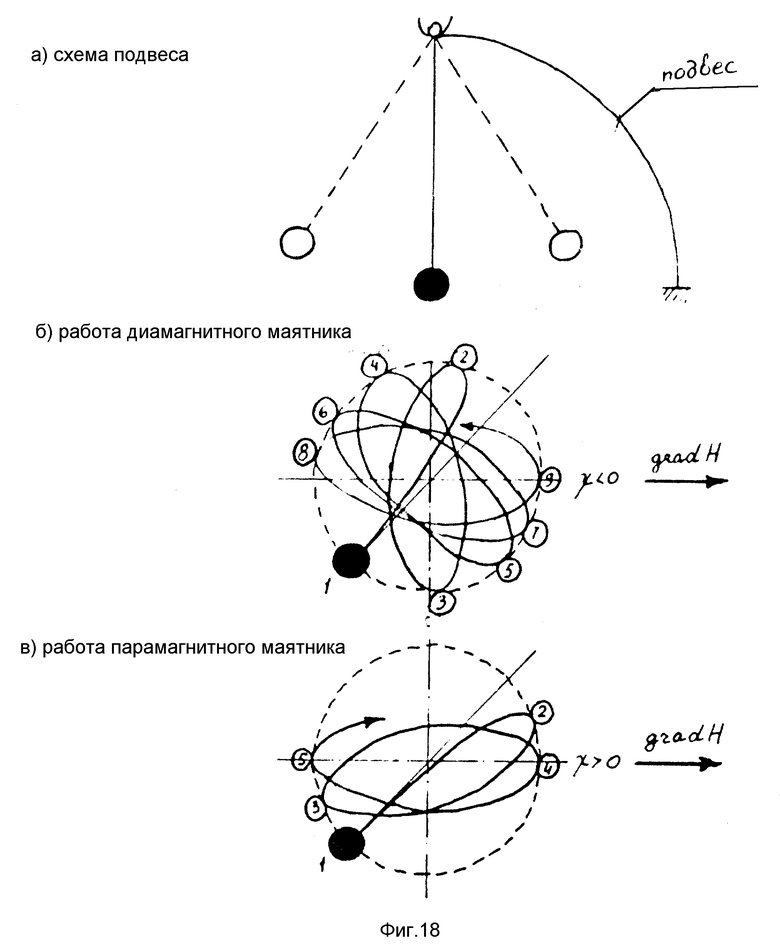
На фиг. 18 изображен градиентометр азимутальный маятниковый в рабочем состоянии.
Физические свойства подземной транспортной коммуникации резко отличаются от физических свойств вмещающей среды (удельная плотность, способность намагничиваться в магнитном поле Земли), а сама коммуникация в первом приближении может быть определена как цилиндр бесконечного простирания.
Обычно глубина залегания коммуникации от одного (кабели, теплотрасса) до четырех (водопровод, нефтепровод) метров, а потерянные крышки колодцев лежат на глубине не более полметра.
Эти факторы являются причиной того, что над коммуникацией появляются резкие аномалии магнитного и гравитационного полей, и плановые координаты таких объектов лучше всего обрисовываются на плановых картинах градиентов горизонтальных составляющих магнитных и гравитационных аномалий, причем чем выше порядок анализируемой производной поля, тем резче проявляются контуры подземного объекта, и чем больше глубина залегания объекта, тем больше размеры "проступающего" контура и тем более размытыми становятся его границы.
Вследствие того, что источников магнитных и гравитационных аномалий является один и тот же объект, можно принять, что графики распределения аномалий горизонтального магнитного (Ha) и горизонтального гравитационного (Ga) полей вкрест простирания коммуникации (фиг. 1) повторяют друг друга по форме, отличаясь лишь масштабностью значений функций при одном и том же значении аргумента (координат местности). При этом
Ha = 1/Gδ•J•Vxz,
где G - гравитационная постоянная,
δ - удельная плотность цилиндра,
J - намагниченность цилиндра во внешнем магнитном поле Земли,
Ha - величина аномалии горизонтальной составляющей магнитного поля,
Vxz - величина аномалии горизонтальной составляющей поля силы тяжести.
Характерные точки - это те точки на местности, где аномалии достигают максимальных значений (± Xэкстр) или меняют свой знак (X = o).
При вертикальном намагничении и с осью простирания Y, направленной на север, глубина залегания h определяется как
График первой производной горизонтального поля (Hagr, Gagr) показаны на той же фиг. 1, причем производная берется по расстоянию X при этом
где Hagr - градиент горизонтального магнитного поля;
Gagr -градиент горизонтального гравитационного поля.
Из фиг. 1 видно, что напряженности направлены в сторону коммуникации, с переменой направления на противоположное в точке X = 0.
Градиенты же меняют свое направление трижды: при X = -Xэкстр X = O и X = +Xэкстр
Над металлической крышкой колодца линия экстремумов (максимумов) повторяет форму крышки и градиенты меняют свой знак только один раз при приближении к ней с любой стороны (фиг. 2).
Если транспортируемая среда (вода, нефть, электрический ток) не движется, то линии действия векторов напряженностей и их градиентов перпендикулярны плановой проекции оси простирания коммуникации (фиг. 1).
Если же коммуникация находится в рабочем состоянии, то линии векторного поля изгибаются в направлении перемещения транспортируемой среды, причем тем более круче, чем больше скорость движения потока (фиг. 3), причем в месте повреждения картина поля становится менее упорядоченной и даже меняется во времени, становясь нестационарной из-за флуктуации, вытекающей из места повреждения транспортируемой среды как по величине, так и по направлению.
Если устройство для фиксации направлений градиентов находится в руках оператора или в непосредственной близости от него, то необходимо учитывать градиенты магнитного и гравитационного поля, обусловленные наличием у оператора как магнитной, так и инертной (гравитационной) массы.
К тому же при определении глубины залегания нужно учитывать расстояние между устройством, находящемся в руках, и поверхностью Земли. Обычно устройство находится на уровне солнечного сплетения на расстоянии от тела оператора, равном длине предплечья (r0), при свободно опущенных плечах. Кисти рук при этом находятся с левой и правой стороны от продольной оси следования оператора.
Магнитные поля живого организма могут вызываться тремя причинами.
Прежде всего это биотоки (движущиеся ионы и радикалы), возникающие вследствие электрической активности ленточных мембран, главным образом таких клеток, как мышечные и нервные.
Другим источником являются мельчайшие сильномагнитные (ферромагнитные) частицы, попавшие в организм. У взрослого человека общее содержание железа в организме достигает 4 - 5 грамм.
Эти два источника создают собственное магнитное поле.
Третий источник - это неоднородности магнитной восприимчивости различных органов, которые проявляют себя только при наложении внешних магнитных полей.
На фиг. 4 показана плановая картина градиентов оператора в левой (A) и правой (B) областях, где расположены кисти. Внешнее поле предполагается равномерным и стационарным (не меняющемся во времени). Градиент оператора (Hogr, Gogr) представляет собой векторную сумму градиента тела (Htgr, Gtgr) и градиента руки (Hpgr, Gpgr)
Градиенты направлены в сторону возмущающего объекта (оператора), а линии действия градиентов l0 составляют некоторый начальный угол α0 с направлением предполагаемого перемещения оператора X.
Если градиенты вешнего поля (Hagr, Gagr) направлены "от оператора" (фиг. 5), то суммарный градиент (Hgr, Ggr) действует по линии l, повернувшейся на угол αнар относительно направления l0.
Если же градиенты внешнего поля направлены "к оператору", то линии градиентов l0 поворачиваются в левой и правой кистях на угол αвн "внутрь" (фиг. 6).
Обычно оператор должен так ориентировать направление X путем поворота корпуса в ту или иную сторону, чтобы углы αA и αB в левой и правой кистях были равны между собой. Тогда линии действия внешних градиентов будут параллельны линии X, а направление внешних градиентов будет определяться характером поворота линии суммарных градиентов с левой и правой сторон "наружу" или "внутрь".
Таким образом, при следовании оператора вкрест простирания коммуникации вдоль оси X (фиг. 1) линии градиентов суммарного поля la и lb будут поворачиваться "наружу" или "внутрь" в зависимости от направления градиентов внешнего поля, что позволяет определить координаты характерных точек аномалии слева и справа от оси простирания коммуникации.
На фиг. 7,а представлен график распределения величины α в зависимости от координат оператора на профильном сечении коммуникации, при этом при поворотах "наружу" угол α считается положительным, а "внутрь" - отрицательным.
Этот график α = ϕ(x) повторяет по форме и по координатам характерных точек график градиента горизонтального поля на фиг. 1.
На фиг. 7,б показаны схематически плановые фрагменты направлений линии la и lb в отдельных точках пути следования оператора слева направо при его остановках.
Отмечая точки, где la (lb) совпадают с l0, можно определить координаты характерных точек аномалий.
Если оператор исследует местность в непрерывном движении со скоростью следования V0, то линия l будет совершать в руке оператора круговые колебания вокруг точки A(B) с угловой скоростью ω, пропорциональной как градиенту  (скорости изменения α вдоль оси X), так и скорости его передвижения
(скорости изменения α вдоль оси X), так и скорости его передвижения 
В характерных точках профильного сечения угол поворота "наружу" или "внутрь" достигает своих крайних значений с переменой направления вращения на противоположное, но координаты таких "крайних" положении линии l будут равны Х = ± 0,5 Xэкстр.
Скорость же вращения (угловая) линии l(ω) будет максимальной в точках с координатами X = +Xэкстр, X = -Xэкстр и X = 0.
Эта скорость фактически пропорциональна градиенту градиента горизонтального магнитного и гравитационного полей, являясь более высшей (на порядок) производной потенциала, нежели градиент горизонтальной составляющей магнитного (гравитационного) поля.
Способ позволяет более оперативно определить координаты подземной транспортной коммуникации и ее состояние, более рельефно обрисовать ее плановые контуры за счет использования более высших производных аномального магнитного и гравитационного полей, умноженных на эффект совместного учета магнитных и гравитационных аномалий.
Для проведения измерений может быть использовано устройство, у которого чувствительным органом является горизонтальный стержень из магнитомягкого ферромагнетика, имеющий возможность свободного вращения вокруг одного из своих концов, шарнирно закрепленного в верхней части вертикальной ручки (фиг. 8).
Длина стержня lст = 200 - 300 мм, а диаметр dст = 2 - 3 мм.
стержень может быть выполненным из μ - железа с коэффициентом магнитной восприимчивости χ = ДО 10000 • 10-5 и с коэрцитивной силой Hc примерно равной нулю.
Ручка, удерживаемая в руках оператора (с левой, правой) изготовлена из магнитонейтрального (χ = 0) материала, не проводящего электрический ток, например из сухого дерева.
Подшипниковый узел, обеспечивающий возможность вращения стержня в горизонтальной плоскости, состоит из двух подшипников качения (шарикоподшипники) с наружным диаметром 7 мм, а внутренним - 2 мм. Высота подшипникового узла 15 - 20 мм.
Вместо шарикоподшипников могут быть применены подшипники скольжения на основе фторопласта, но тогда чувствительность устройства будет несколько меньше.
В неравномерном магнитном поле на стержень будут действовать силы, стремящиеся установить его и вдоль линии магнитного поля и в направлении градиента горизонтального магнитного поля.
Стержень увлекается в область увеличенных значений горизонтального магнитного поля (H) с силой, пропорциональной объему стержня, магнитной восприимчивости и градиенту горизонтального магнитного поля. Для μ - железа χ имеет самое высокое значение среди ферромагнетиков, поэтому появится заметный момент, устанавливающий стержень свободным концом по направлению градиента магнитного поля (MgrH).
Из-за наличия у стержня собственной инертной массы (гравитационной массы) на него действует усилие в направлении горизонтальной напряженности гравитационного поля, пропорционально его величине.
В результате появляется момент (MG), устанавливающий стержень продольной осью вдоль линии горизонтальной составляющей поля силы тяжести.
На графиках зависимости моментов от азимута свободного конца относительно линии напряженностей и их градиентов на фиг. 9 для совпадающих направлений напряженностей и градиентов, а на фиг. 10 для противоположных, можно отметить, что и в том и в другом случае стержень устанавливается свободным концом по направлению градиентов горизонтального магнитного и гравитационного полей, действующих согласованно из-за того, что источником и магнитных и гравитационных аномалий является один и тот же объект.
Суммарный ориентирущий момент на фиг. 9 приводит к тому, что свободный конец устанавливается в направлении 0o (360o), а на фиг. 10 - в направлении 180o.
При полевой съемке вкрест простирания коммуникации проще всего пользоваться сразу двумя устройствами, удерживая одно устройство в левой, а другое - в правой руке, чтобы отмечать направления градиентов (фиг. 4). В равномерном и стационарном поле стержни установятся вдоль линии l0. При следовании поперек оси простирания вдоль оси X стержни "расходятся" (фиг. 5) или "сходятся" (фиг. 6), устанавливаясь вдоль линии la, lb, что отмечается оператором визуально.
Стержни можно устанавливать как "от себя", так и "к себе" наклоном ручки. Чувствительность устройства можно регулировать, изменяя угол наклона. При вертикальном положении ручки чувствительность максимальна. При достаточной натренированности можно пользоваться и одним устройством, удерживая его в "рабочей" руке, как более чувствительной. Для большинства мужчин "рабочая" рука-правая, для женщин - левая. При работе с двумя устройствами стержень в "рабочей" руке обычно первым реагирует на изменения величины и направления градиентов (более подвижен).
Устанавливающие (ориентирующие) моменты сравнительно малы по величине, и могут оказаться менее момента трения покоя в подшипниковом узле шарнирного крепления в ручке. Поэтому возможны "застревания" стержня в промежуточных положениях, если, например, ручку закрепить на местности даже строго вертикально.
Рука же оператора вместе с ручкой совершает незаметные колебания с определенной периодичностью во всех трех плоскостях, что приводит к периодически повторяющимся положениям невесомости стержня, когда даже малые усилия от аномалии внешнего поля пусть не сразу, а постепенно, но поворачивают стержень по направлению источников этих аномалий. Поэтому при фиксации азимутов градиента в отдельной точке местности необходимо выдержать определенный промежуток времени от начала до конца измерения, удерживая устройства в рабочем положении.
При следовании оператора по маршруту в непрерывном режиме со скоростью V0 (фиг. 7) появляются динамические моменты, обусловленные наличием момента инерции стержня относительно вертикальной оси вращения, которые могут быть больше моментов сил трения движения (меньших по величине, нежели моменты сил трения покоя) в подшипниковом узле.
Учитывая эти особенности, оператор должен так регулировать скорость своего передвижения, чтобы не "проскочить" координаты характерных точек аномалии, а при необходимости исследовать "подозрительное" место с другой скоростью и в противоположном направлении.
Для того, чтобы избавиться по возможности от изгибающих усилий в подшипниковом узле и увеличить чувствительность устройства путем удержания ручки строго в вертикальном положении, в узле крепления стержня устанавливается еще один уравновешивающий стержень из диамагнетика (например, из меди) примерно такой же длины, причем продольные оси стержней из магнитомягкого ферромагнетика и диамагнетика совпадают (фиг. 11,а), причем между стержнями находится короткое коромысло из непроводящего магнитонейтрального материала, чтобы по возможности исключить между стержнями электрическую и магнитную связь.
Графики устанавливающих моментов для совпадающих направлений напряженностей и их градиентов приведены на фиг. 12, а для противоположных - на фиг. 13.
Для такого устройства значительную роль играет градиент горизонтального гравитационного поля (MgrH), устанавливающий составной стержень вдоль линии действия этого градиента (фиг. 12,г, 13,г).
Наличие трения покоя в подшипниковом узле также может привести к "застреванию" стержня в промежуточном положении при попытке зафиксировать азимут градиента при неподвижно закрепленной в точке замера вертикальной ручке, хотя такой недостаток достаток также может быть скомпенсирован регулированием скорости перемещения устройства по обследуемому маршруту.
Избавиться от трения при поворотах стержня можно, если осуществить подвес стержня в центре тяжести с помощью тонкой нерастяжимой нити (фиг. 11,б). Подвес осуществляется на проволочной полудуге из магнитонейтрального материала так, чтобы стержень мог совершать полный оборот в горизонтальной плоскости. Полудуга укреплена на легком круглом основании из нейтрального материала так, чтобы проекция нити подвеса на горизонтальную плоскость совпадала с центром основания, отградуированного в градусах для фиксации угла поворота стержня относительно положения свободного равновесия при раскрученной нити. Такое положение стержня с фиксацией нулевой отметки на основании определяется в равномерном и стационарном магнитном и гравитационном поле.
Устройство может устанавливаться на поверхности исследуемой области пространства, размеры которой определяются размерами составного стержня, в рабочем положении. После этого основание поворачивают в ту сторону, куда поворачивается стержень под действием аномалий вмещающего пространства до тех пор, пока стержень не остановится. Таких положений устойчивости может быть несколько, поэтому необходимо проследить эти положения, поворачивая основание на 360 градусов. Одно из самых устойчивых положений можно принять за исходное, и, сохраняя ориентацию основания с полудугой постоянными, можно получить углы отклонения стержня от нулевой отметки в различных точках местности.
Устройство очень чувствительно, поэтому до конца измерений оператор должен сохранять относительно устройства одно и то же положение, и даже одно и то же настроение доброжелательного исследователя.
Для того чтобы выделить линию действия горизонтального магнитного поля, можно подвесить ферромагнитный стержень, который повернется вдоль линии магнитного поля (фиг. 14). Горизонтальный стержень из диамагнетика (меди) повернется перпендикулярно линии магнитного поля (фиг. 15). Стержень из магнитонейтрального материала повернется вдоль линии горизонтального гравитационного поля (фиг. 16).
Два уравновешенных сферических груза, свободно подвешенных на горизонтальном легком коромысле, укажут направление градиента горизонтального магнитного поля и линии градиента горизонтального гравитационного поля, если один груз изготовлен из магнитомягкого ферромагнетика, а другой - из диамагнетика (фиг. 11,в). График ориентирующих моментов для такого устройства представлен на фиг. 17.
В состоянии свободного равновесия ферромагнитный грузик установится в направлении градиента горизонтального магнитного поля.
Свободно подвешенный маятниковый грузик из магнитомягкого ферромагнетика (фиг. 11,г) также может служить для определения азимута линии действия горизонтальной напряженности и ее градиента (фиг. 18).
Если отклонить маятник от положения равновесия в положение 1 и отпустить, то в равномерном и стационарном поле он будет раскачиваться в вертикальной плоскости, проходящей через точку 1 и положение равновесия 0.
В неравномерном магнитном и гравитационном поле маятник будет описывать в пространстве сложную траекторию, плановая проекция которой близка к эллипсоидной с большой осью, постепенно поворачивающейся до совпадения с направлением горизонтальных напряженностей магнитного и гравитационного полей и их градиентов. Спустя некоторое время маятник начнет описывать траекторию эллипса с увеличенным соотношением большой оси к малой и с уменьшением длины самой большой оси этого эллипса.
В конце концов плановая траектория движения маятникового груза превратится в прямую линию, совпадающую с линиями действия напряженностей и градиентов.
Характер входа в конечное положение (скорость поворота большой оси эллипса, изменение формы эллипса со временем, направление вращения грузика вокруг вертикальной оси подвеса нити) зависит от того, совпадают ли направления напряженностей с их градиентами или нет, и от характера распределения величин поля во вмещающем описываемую грузиком траекторию пространстве.
Можно, не дожидаясь, пока движения грузика стабилизируется, остановить грузик, развернуть подставку с подвесом на соответствующий угол в горизонтальной плоскости и снова "качнуть" маятник. Такие манипуляции нужно проводить до тех пор, пока отпущенный маятник не начнет раскачиваться довольно продолжительное время в вертикальной плоскости, проходящей через нижнее положение равновесия с плановой траекторией движения в виде линии, указывающей линию действия соответствующих горизонтальных градиентов.
Последующие измерения можно проводить в других точках местности при сохранении зафиксированного азимута подставки относительно направления на север, отмечая при этом новые направления градиентов.
Грузик можно изготовить из магнитонейтрального материала с целью фиксации азимутов гравитационных аномалий.
При соответствующих навыках оператор может удерживать маятник за нить подвеса в руке (левой, правой или в каждой), проводя оперативные исследования как на ходу, так и в неподвижном состоянии, но теперь уже с учетом собственных магнитных и гравитационных излучений.
При работе с одним маятником желательно удерживать его в "рабочей" руке.
Предлагаемые устройства просты по конструкции, позволяют оперативно определять направления горизонтальных градиентов магнитного поля и поля гравитации в исследуемой области пространства как при непрерывном перемещении устройства оператором, так и в статическом положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ГРАВИМЕТРИЧЕСКОГО ЗОНДИРОВАНИЯ | 2014 |
|
RU2581076C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОТОБРАЖЕНИЯ ФИГУРЫ ГАЗОНЕФТЯНОЙ ЛОГ-ТРУБКИ | 2008 |
|
RU2401443C2 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| БИБЛИОТЕКА I | 1972 |
|
SU332402A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504763C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| ВЕРТИКАЛЬНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2004 |
|
RU2292065C2 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
Использование: в области геомагнитной разведки и при биолокации, для повышения оперативности поиска, удобства пользования и упрощения устройства. Сущность изобретения: устройство состоит из горизонтального коромысла, подвешенного на тонкой перетяжной нити, на концах коромысла выполнены два уравновешивающих грузика из магнетиков с противоположными знаками магнитной восприимчивости. 18 ил.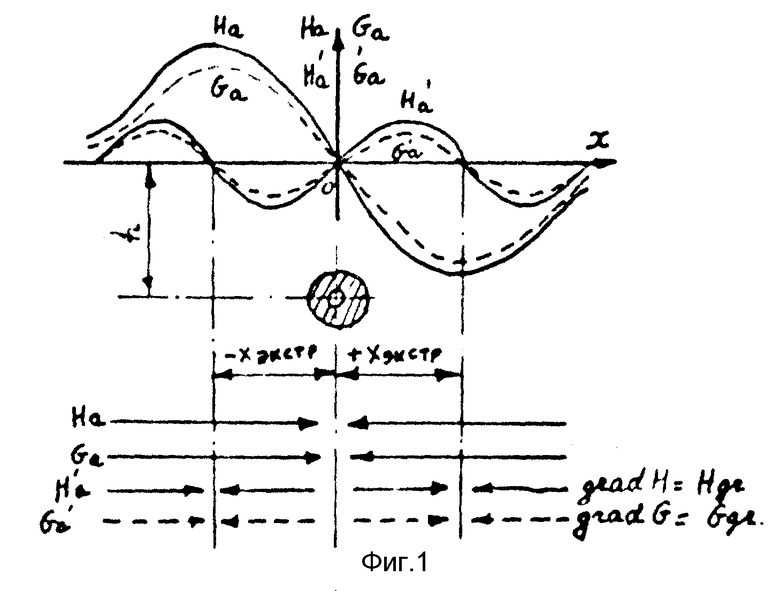
Устройство для геомагнитной разведки, состоящее из горизонтального коромысла с двумя уравновешивающими грузиками на концах и подвешенного на тонкой нерастяжимой нити, отличающееся тем, что грузики выполнены из магнетиков с противоположными знаками коэффициента магнитной восприимчивости.
| Литвиненко А.А | |||
| Практическая биолокация | |||
| - Хмельницкий: Подiпля, УССР, 1991, с.10 - 19 | |||
| Устройство для геомагнитной разведки | 1978 |
|
SU805224A1 |
| Рамка для поисков биолокационным методом | 1979 |
|
SU1126915A1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2159856C2 |
| 0 |
|
SU402930A1 | |
