Изобретение относится к области градиентометрии и может быть использовано в исследованиях различного рода геофизических явлений и процессов, в том числе в сейсмологии для решения задач оперативного прогноза землетрясений.
Известны конструкции гравитационных вариометров, основанные на использовании крутильных весов, где на тонкой нити (торсионе) вывешивается рабочее тело (коромысло) в виде гантели с грузами на концах; крутильная система при этом является физическим маятником. Эти приборы (аналоги) широко применялись в поисковой геологоразведке, геодезических работах и тонких физических экспериментах. Описание конструкций гравитационных вариометров содержится в литературе (Юзефович А.П., Огородова Л.В. Гравиметрия. М.: Наука, 1980) и материалах изобретений RU 2096813, US 4841772, US 4022064.
Основные недостатки аналогов состоят в следующем. Все геофизические гравитационные вариометры и градиентометры выполнялись в газонаполненных конструкциях, т.е. «затушенными» для обеспечения демпфирования колебаний коромысла, что вызвано необходимостью повышения производительности приборов при их использовании по прямому назначению - измерении компонент гравитационного градиента в процессе работ в интересах геологоразведки, геодезии и т.п. Однако демпфирование колебаний приводит к диссипативным потерям в устройстве подвеса крутильной системы прибора и, следовательно, к снижению точности. Поэтому прибор с такими характеристиками в качестве сейсмоприемника будет обладать низкой чувствительностью при приеме сейсмических волн. По этой же причине - малой добротности резонансной настройки контура физического маятника - оказываются весьма невысокие частотно-селективные свойства такого прибора.
Другим важным недостатком аналогов является то обстоятельство, что технологии производства гравитационных вариометров и градиентометров с торсионным подвесом коромысла, применявшиеся в прошлом веке, в настоящее время практически утрачены. Современные технологии прецизионного приборостроения базируются на использовании бесконтактных подвесов рабочего тела и вакуумных технологиях, что определяет существенные преимущества приборов по технико-экономическим характеристикам.
В качестве прототипа принят гравитационный вариометр, выполненный в виде прибора с магнитным подвесом коромысла, помещенного в вакуумированную камеру (патент РФ №2175773). В этом приборе управление движением коромысла производится с помощью системы автоматического регулирования, исполнительными элементами которой являются электростатические датчики момента, а индикаторными - оптико-электронные датчики углов. Роторные элементы датчиков расположены на коромысле, а статорные - на корпусе прибора. Выбранный прототип - геофизический гравитационный вариометр - в отличие от приведенных аналогов выполнен в малых габаритах, определяемых величиной приведенной длины маятника (около 1 см).
Недостатком прототипа является большое различие частот собственных колебаний вывешенного коромысла относительно горизонтальных осей. Для гравитационного вариометра, используемого по прямому назначению для измерения гравитационного градиента, это не является недостатком, однако для работы сейсмоприемника несовпадение собственных частот колебаний обоих маятниковых каналов недопустимо. Это обусловлено тем, что полезный сигнал прибора, содержащий информацию о прогностических признаках при аномальной сейсмической активности в районе предстоящего землетрясения, подлежит точному измерению для вычисления пеленга на очаг зарождающегося катаклизма и его интенсивности. Для точного измерения целесообразно формирование сигнала в виде величины, постоянной во времени. Это обеспечивается в случае синхронности вынужденных колебаний физического маятника по обеим координатам, вызванных сейсмическими волнами от источника сейсмической активности. Такое условие в конструкции прототипа невыполнимо из-за различия собственных частот колебаний физического маятника вследствие асимметрии инерционных свойств коромысла. Очевидное решение этой задачи только путем увеличения приведенной длины маятника в конструкции прототипа приведет к тому, что элементы системы управления движением коромысла окажутся неработоспособными. Это обстоятельство обусловлено тем, что упомянутые элементы управления (датчики момента и датчики углов рассогласования коромысла с корпусом прибора) выполнены в виде бесконтактных устройств с рабочим зазором между роторными элементами, расположенными на подвижном коромысле, и статорными - на корпусе прибора. Их сигналы зависят как от измеряемого параметра (момента или угла), так и от величины рабочего зазора. Например, величина момента дифференциального датчика момента пропорциональна управляющему напряжению и обратно пропорциональна квадрату величины зазора между статорными и роторными электродами. При значительных изменениях рабочего зазора влияние этого фактора может оказаться разрушительным для функционирования прибора. С другой стороны, для функциональной состоятельности и качества работы сейсмоприемника следует повышать добротность резонансного контура маятника, поскольку при этом полезный сигнал в азимутальном контуре прибора возрастает пропорционально квадрату величины добротности в горизонтальном контуре. Качество подвеса крутильной системы прототипа обеспечивает величину добротности на уровне нескольких сотен. Но при этом амплитуда вынужденных колебаний маятника при сейсмической активности возрастает в той же степени. Отсюда следует, что при размещении устройств системы управления на значительном расстоянии от центра подвеса крутильной системы также происходит увеличение рабочих зазоров между статорными и роторными элементами, что недопустимо.
Таким образом, конструкторские решения, принятые в прототипе, противоречат задачам создания градиентометрического сейсмоприемника для оперативного прогноза землетрясений.
Задачей настоящего изобретения является расширение функциональных возможностей гравитационного вариометра и создание на его основе высокочувствительного сейсмоприемника для оперативного прогноза землетрясений. Согласно изобретению указанная задача решается тем, что в верхней части корпуса соосно цилиндрическому карману выполнена кольцевая выемка, в которой размещены роторные и статорные электроды электростатических датчиков момента и оптических датчиков угла, при этом горизонтальная плоскость симметрии указанных датчиков проходит через центр сферической поверхности ферромагнитного якоря.
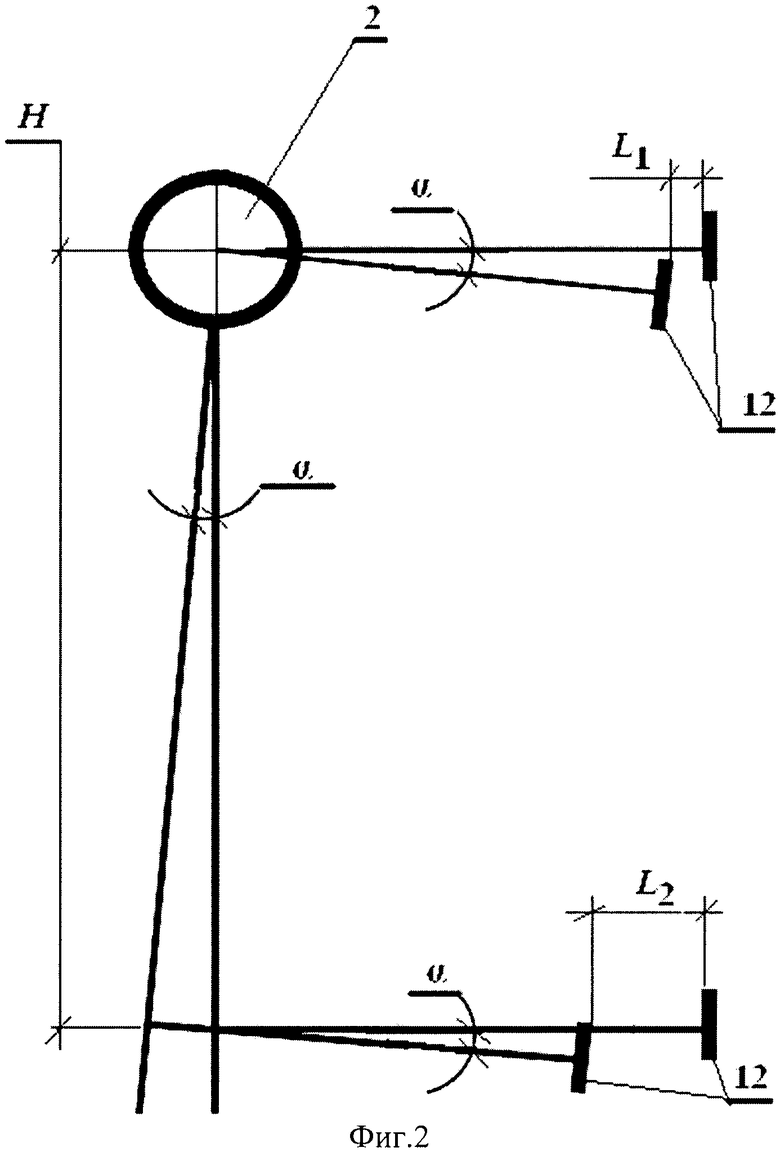
Сущность изобретения поясняется чертежами, где на фиг.1 представлено конструктивное оформление гравитационного вариометра и на фиг.2 показана схема угловых перемещений роторных элементов и изменение линейных зазоров между роторными и статорными элементами датчиков момента.
На фиг.1 и 2 обозначены:
1 - коромысло, включающее гнездовую выемку с базовой посадочной поверхностью и жестко связанные или выполненные за одно целое с гнездовой выемкой консольные элементы;
2 - ферромагнитный сферический якорь из магнитомягкого сплава, жестко зафиксированный на базовой посадочной поверхности в гнездовой выемке коромысла 1 с размещением геометрического центра якоря на вертикальной оси симметрии коромысла 1;
3 - грузы, укрепленные на концах консольных элементов коромысла 1 посредством сварки или пайки;
4 - корпус из тонкостенного немагнитного материала, в котором размещается коромысло 1 с грузами 3 и якорем 2 и конфигурация которого соответствует конфигурации коромысла 1;
5 - крышка корпуса 4, герметично соединяемая с корпусом на стадии сборки вариометра;
6 - сердечник осесимметричного управляемого электромагнита бесконтактного подвеса коромысла 1 с якорем 2 и грузами 3, размещенный снаружи корпуса 4 с совпадением оси сердечника 6 и оси вертикальной симметрии коромысла 1;
7 - катушка электромагнита;
8 - цилиндрический магнитопровод электромагнита;
9 - датчик положения для управления вывешиванием коромысла 1 в подвесе;
10 - оптические датчики угла для измерения колебания коромысла 1 вокруг трех ортогональных осей;
11 - вертикальный стержень коромысла 1, обеспечивающий требуемое расстояние между грузами 3 и гнездовой выемкой, в которой размещен ферромагнитный сферический якорь 2;
12 - электростатические датчики момента для управления движением коромысла 1 в азимуте;
13 - траверса, на которой фиксируются роторные элементы электростатических датчиков момента 12 и зеркальные площадки оптических датчиков угла 10;
14 - узел крепления траверсы 13 на вертикальном стержне 11;
15 - узлы герметичного соединения корпуса 4 с крышкой 5;
Н - расстояние между центром симметрии ферромагнитного сферического якоря 2 и горизонтальной плоскостью, в которой расположены центры грузов 3, укрепленных на концах консольных элементов коромысла 1;
α - угол поворота коромысла 1 в вертикальной плоскости вокруг центра якоря 2;
L1 и L2 - величины, характеризующие изменение исходного зазора между встречно обращенными элементами датчиков для плоскости грузов 3 и для плоскости, проходящей через центр якоря 2 перпендикулярно оси коромысла 1.
Функционирует гравитационный вариометр представленной конструкции следующим образом.
На катушку 7 электромагнита, состоящего из магнитопровода 8 и сердечника 6, от выходного блока системы управления по сигналам датчика перемещения 9 подается электрическое напряжение постоянного тока. Этим обеспечивается постоянство рабочего зазора между сферическим якорем 2 и сердечником электромагнита 6 и реализация бесконтактного подвеса коромысла 1 с якорем 2 и грузами 3 за счет формирования магнитного поля, создающего тяговую силу для уравновешивания коромысла 1.
Корпус 4 с крышкой 5 образует вакуумированное пространство для размещения подвижного коромысла 1 с элементами управления и индикации его положения.
Очевидным является необходимость согласования геометрических параметров кольцевой выемки, расположенных в ней оптических датчиков угла 10 для измерения колебания коромысла 1 вокруг трех ортогональных осей и электростатических датчиков момента 12 для управления движением коромысла 1 в азимуте. Соответственно должна иметь определенную конфигурацию траверса 13, а процесс сборки вариометра должен предусматривать точную выставку траверсы 13 с обеспечением линейного размера Н посредством ее фиксации на вертикальном стержне 11 с помощью узла крепления 14.
Предлагаемая конструкция магнитной системы в максимально возможной степени приближена к идеальной схеме «точечного» подвеса, где якорь располагается внутри электромагнита и его взаимодействие с другими источниками магнитного поля полностью отсутствует.
Функционирование прибора осуществляется в автоматическом режиме, что обеспечивается использованием электростатических датчиков момента 12, являющихся исполнительными элементами в автокомпенсационной схеме измерений гравитационного момента, и автоколлимационных датчиков 10 углов колебаний вывешенного коромысла 1, включенных в систему управления его движением (на фиг.1 не показана) как элементы обратной связи.
Гравитационные вариометры, в том числе и прототип, предназначены для измерения составляющих второй производной гравитационного потенциала (в виде момента закрутки гантельного коромысла) и ранее в сейсмологии не применялись. Для функционирования гравитационного вариометра в качестве сейсмоприемника необходимо, чтобы его сигналы содержали информацию о прогностических признаках: время, место и интенсивность катаклизма. Оперативный прогноз состоит в заблаговременном отклике приборов на эти признаки, т.е. хотя бы за несколько часов до катаклизма. Физические предпосылки решения задачи оперативного прогноза землетрясений с помощью гравитационного вариометра обеспечиваются фактом возникновения предвестников вследствие тектонических процессов в области предстоящего землетрясения и свойствами прибора, реагирующего на эти предвестники.
При возникновении аномальной сейсмической активности в регионе очага предстоящего землетрясения образуется система трещин, которая за несколько десятков часов до землетрясения излучает сейсмические колебания в широком частотном диапазоне. Высокочастотные волны поглощаются в окрестностях трещины, а низкочастотные волны (0,1-5 Гц) распространяются по поверхности Земли на значительные расстояния, создавая колебания основания в месте установки приборов. Эти колебания при резонансной настройке контура физического маятника (крутильной системы с вывешенным гантельным коромыслом) на одну из частот (например, 0,5 Гц) спектра сейсмических волн вызывают вынужденные колебания маятника с амплитудой, величина которой пропорциональна добротности контура.
При вынужденных колебаниях коромысла с частотой собственных колебаний ωс (на резонансе) происходит увеличение амплитуды по углу и скорости колебаний, т.е. для углов колебаний маятника относительно главных осей инерции коромысла имеем выражения вида:

и, соответственно, для угловой скорости:

Здесь D= - добротность резонансного контура, x, y - поступательные перемещения основания прибора в направлении главных осей инерции коромысла; g - ускорение силы тяжести;
- добротность резонансного контура, x, y - поступательные перемещения основания прибора в направлении главных осей инерции коромысла; g - ускорение силы тяжести;  - относительный коэффициент демпфирования резонансного контура маятника.
- относительный коэффициент демпфирования резонансного контура маятника.
Использование гравитационного вариометра в качестве сейсмоприемника основано на гантельном эффекте, который состоит в том, что при пространственных колебаниях вывешенного твердого тела с тремя степенями свободы по угловым координатам и анизотропными свойствами тензора инерции возникают крутящие моменты вокруг осей поворота вида:

Ωx, Ωy - угловые скорости колебаний вывешенного тела (коромысла) вокруг осей, совпадающих с его главными осями инерции X, Y (в конструкциях ГВ первого рода эти оси лежат в плоскости горизонта);
Jx, Jy - главные моменты инерции.
Принципиальное значение здесь имеет различие главных моментов инерции (в случае симметричного тела Jx=Jy и гантельный эффект не проявляется), но в гравитационных вариометрах это различие является органическим свойством для любой конструкции коромысла.
Поскольку x=AsinӨ, y=AcosӨ (здесь А - амплитуда перемещений основания прибора, θ - угол между направлением цуга сейсмических волн и одной из главных осей инерции коромысла), то согласно (1), (2), (3) закручивающий момент вокруг вертикальной оси получим в виде:

Из этого выражения видно, что резонансное усиление крутящего момента зависит от добротности настройки контура и характеризуется квадратичной формой. Это определяет высокие частотно-селективные свойства гравитационного вариометра в отличие от сейсмографов, применяемых в современной сейсмологии. Момент (4) содержит переменную составляющую с двойной частотой, не представляющую интереса, и детектированную, которая может быть измерена различными способами как гравитационный момент в вариометре, применяемом по прямому назначению. Ее знак и величина зависят от азимута θ вектора А перемещения основания прибора. Отсюда следует, что закручивающий момент сейсмоприемника характеризуется диаграммой направленности подобно антенне.
Измерение момента (4) производится в системе управления движением коромысла так же, как в прототипе, где выходным сигналом прибора является управляющий сигнал на входе датчика момента 12 (фиг.1 и 2). Для точного измерения управляющего сигнала рабочие зазоры между роторными и статорными элементами датчика момента, а также датчиков углов должны быть постоянными независимо от колебаний крутильного маятника относительно горизонтальных осей. Это обеспечивается расположением роторных элементов на траверсе 13, когда плоскость симметрии проходит через центр сферического якоря 2 устройства подвеса. При такой конструкции исключается ситуация, показанная на фиг.2, где при удалении устройств управления и индикации от центра подвеса маятника (центра сферического якоря 2) на расстояние Н рабочий зазор L2 между электродами 12 может изменяться в широких пределах и управление движением коромысла практически невозможно.
При расположении элементов индикации 10 и управления 12, как это показано на фиг.1, обеспечивается их нормальное функционирование при больших углах рассогласования подвижной крутильной системы относительно корпуса прибора и измерение сигналов, содержащих информацию о прогностических признаках.
Таким образом, предлагаемая конструкция позволяет с применением элементной базы бесконтактных устройств управления и индикации положения крутильной системы реализовать конструкцию гравитационного вариометра, выполняющего функции сейсмоприемника для решения задач оперативного прогноза землетрясений.
Рассматриваемый гравитационный вариометр может быть применен в составе аппаратуры сейсмических станций.
Предлагаемое изобретение апробировано в виде экспериментальных образцов геофизического гравитационного вариометра, в конструкции которого содержатся все функциональные элементы и узлы сейсмоприемника; при изготовлении этих приборов использованы вакуумные технологии прецизионного приборостроения.
Технико-экономическая эффективность изобретения заключается в создании конструкции сейсмоприемника для оперативного прогноза землетрясений с определением координат места очага и его интенсивности за 1-1,5 суток до события.
Экономический эффект на данном этапе подсчитать не представляется возможным из-за отсутствия статистически обоснованных исходных данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА ЗЕМЛЕТРЯСЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2507546C1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА МЕСТА ГОТОВЯЩЕГОСЯ ЗЕМЛЕТРЯСЕНИЯ | 2007 |
|
RU2355000C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2000 |
|
RU2172967C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2000 |
|
RU2175773C1 |
| Гравитационный вариометр | 1977 |
|
SU693325A1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| Гравитационный вариометр | 1976 |
|
SU557341A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Горизонтальный крутильный маятник | 1978 |
|
SU697946A1 |
Изобретение относится к области гравитационной градиентометрии и может быть использовано для геофизических исследований, в частности для оперативного прогноза землетрясений. Гравитационный вариометр согласно изобретению содержит крутильную систему с рабочим телом в виде гантельного коромысла. Особенность изобретения заключается в том, что крутильная система в качестве физического маятника настраивается в резонанс на одну из частот спектра поверхностных волн, излучаемых из зоны аномальной сейсмической активности при зарождении очага землетрясения. Измерение полезного сигнала производится в азимутальном контуре крутильной системы. Резонансная настройка физического маятника обеспечивается бесконтактным магнитным подвесом крутильной системы с элементами индикации и управления ее движением при размещении подвижной системы в вакуумированном корпусе. Для устранения погрешностей гравитационный вариометр снабжен сборочным узлом, обеспечивающим постоянство рабочих зазоров между роторными и статорными элементами датчиков первичной информации. 2 ил.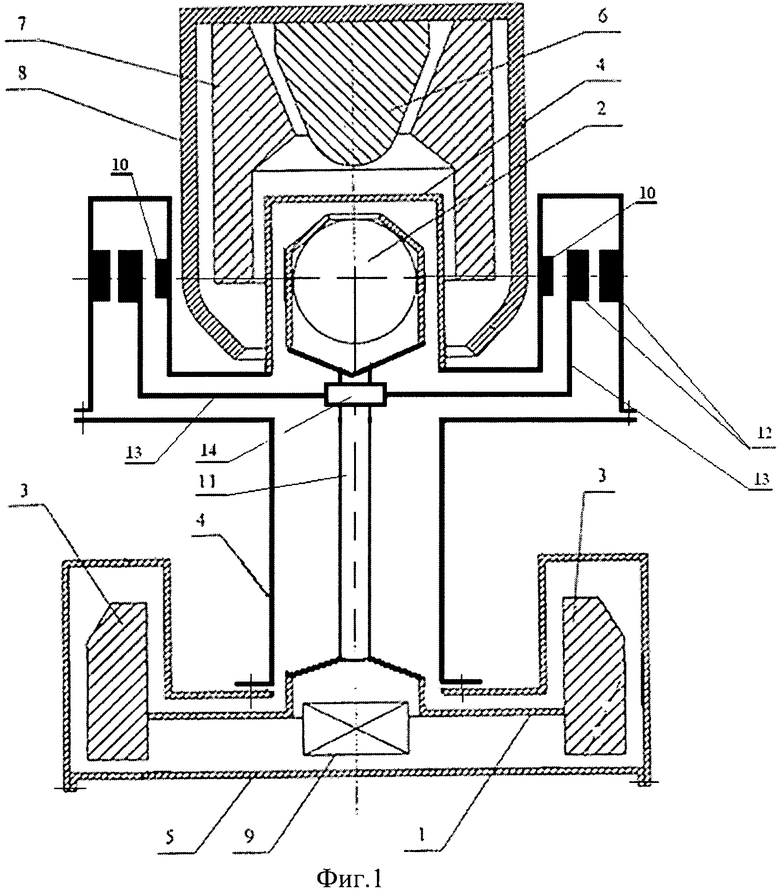
Гравитационный вариометр, содержащий установленное в герметичном корпусе коромысло с грузами, жестко связанный с коромыслом ферромагнитный сферический якорь, размещенный в гнездовой выемке коромысла, которая расположена в цилиндрическом кармане корпуса, статор бесконтактного подвеса коромысла в виде соосного ему осесимметричного электромагнита с катушкой, сердечником, рабочая поверхность которого выполнена в виде сферы, и цилиндрическим магнитопроводом, охватывающим с наружной стороны корпуса упомянутую выемку, электростатические датчики момента, роторные электроды которых жестко связаны с коромыслом, а статорные электроды размещены на корпусе, оптические датчики угла с элементами, укрепленными на коромысле и корпусе, и датчик положения коромысла относительно корпуса, отличающийся тем, что в верхней части корпуса соосно цилиндрическому карману выполнена кольцевая выемка, в которой размещены роторные и статорные электроды электростатических датчиков момента и оптических датчиков углов, при этом горизонтальная плоскость симметрии указанных датчиков проходит через центр сферической поверхности ферромагнитного якоря.
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2000 |
|
RU2175773C1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА МЕСТА ГОТОВЯЩЕГОСЯ ЗЕМЛЕТРЯСЕНИЯ | 2007 |
|
RU2355000C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| US 4841772 А, 27.06.1989 | |||
| US 4022064 А, 10.05.1977 | |||
| Градиентометр | 1982 |
|
SU1081599A1 |
| CN 1693925 A, 09.11.2005 | |||
| СПОСОБ ПРОГНОЗА МЕСТОПОЛОЖЕНИЯ И ИНТЕНСИВНОСТИ ЗЕМЛЕТРЯСЕНИЙ | 1998 |
|
RU2150718C1 |

