Изобретение относится к железнодорожному транспорту и может быть использовано в автоматизированных системах диспетчерского управления железнодорожным транспортом.
Известны способ и реализующая его система интервального регулирования движения при диспетчерской централизации, по которым безопасные скорость и интервал между попутно следующими поездами автоматически поддерживается локомотивными бортовыми устройствами, получающими исходную информацию о координатах своего и соседних поездов на участке управления из диспетчерского центра управления по цифровому каналу радиосвязи, а также от бортового устройства спутниковой навигации. При этом поезда оборудованы устройствами контроля целости состава, а интервальное регулирование осуществляется координатным способом (журнал «Железные дороги мира», 2005, №4, с.46-52, «Продвижение проектов ETCS в Европе»).
Недостатком известных способа и реализующей его системы является отсутствие контроля излома рельсов, что ограничивает область их применения.
Известны способ и реализующая его система интервального регулирования движения, в том числе и при диспетчерской централизации, по которым безопасные скорость и интервал между попутно следующими поездами автоматически поддерживаются локомотивными бортовыми устройствами управления совместно с устройствами автоблокировки (АБ) с рельсовыми цепями (Кравцов Ю.А. «Системы железнодорожной автоматики и телемеханики». - М., Транспорт, 1996, с.255, рис.8.1, с.136, рис.5.7, 5.8, с.141, рис.5.10).
Недостатком известного способа и реализующей его системы является низкая пропускная способность и эффективность ведения поездов, обусловленные недостатком информации о параметрах движения впереди идущего поезда для следующего за ним поезда.
Наиболее близким к изобретению по совокупности существенных признаков является способ интервального регулирования движения поездов при диспетчерской централизации и трехзначной автоблокировке с проходными светофорами, по которому осуществляют автоматическое поддержание локомотивными бортовыми устройствами управления совместно с устройствами автоблокировки безопасных скорости и интервала между попутно следующими на перегонах поездами, а движение каждого из попутно следующих поездов осуществляют под зеленый огонь первого по ходу движения поезда светофора на зеленый огонь второго по ходу движения поезда светофора, при этом локомотивные бортовые устройства управления каждого поезда и диспетчерский центр управления в процессе движения каждого поезда к первому по его ходу движения светофору с зеленым огнем и при условии, что на втором светофоре по его ходу движения еще горит желтый огонь, периодически получают данные о расчетном моменте времени смены упомянутых желтых огней на зеленые огни и используют эти данные для оптимизации управления движением каждого поезда индивидуально и всех поездов на диспетчерском участке в целом.
Система, реализующая вышеуказанный способ, содержит на пути устройства трехзначной автоблокировки с рельсовыми цепями, соединенные с постовыми устройствами ЭЦ станций, ограничивающих перегон, и диспетчерский центр управления, который через линию магистральной связи соединен с постовыми устройствами ЭЦ, диспетчерский центр управления через радиоканал цифровой связи соединен с бортовыми устройствами управления локомотивов поездов, вовлеченных в диспетчерское управление, а на каждом из локомотивов бортовые устройства управления соединены с бортовыми приемниками спутниковой навигации (RU 2387563, B61L 27/00, 27.04.10).
Прогнозирование моментов переключения сигнальных показаний светофоров облегчает работу машинистов и повышает пропускную способность.
Для реализации этого технического решения подвижные единицы рельсового транспорта, движущиеся перед поездами с устройствами автоведения, должны быть оборудованы современными комплектами бортовой аппаратуры управления с устройствами цифровой связи и спутниковой навигации, например, КЛУБ-У. На сегодняшний день имеется значительное количество подвижных единиц рельсового транспорта, не оборудованных такой аппаратурой. Кроме того, в реальных условиях эксплуатации возможны частичные и полные отказы локомотивной аппаратуры. Длина блок-участков при трехзначной автоблокировке может варьироваться в диапазоне 1-2,5 км, а длина поездов при смешанном грузовом и пассажирском движении может отличаться еще в большем диапазоне значений. Эти обстоятельства ограничивают возможности известного технического решения.
Технический результат изобретения заключается в повышении эффективности использования устройств автоведения поездов на перегонах при трехзначной АБ с проходными светофорами.
В части способа технический результат достигается тем, что в способе интервального регулирования движения поездов при диспетчерской централизации и трехзначной автоблокировке с проходными светофорами, по которому осуществляют автоматическое поддержание локомотивными бортовыми устройствами управления совместно с устройствами автоблокировки безопасных скорости и интервала между попутно следующими на перегонах поездами, движение которых осуществляют под зеленый огонь первого по ходу движения поезда светофора на зеленый огонь второго по ходу движения поезда светофора, локомотивные бортовые устройства управления каждого поезда периодически рассчитывают прогнозируемый момент времени освобождения очередного блок-участка и передают эти данные в диспетчерский центр управления, который на их основе осуществляет вычисление времени смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда и передает результаты вычислений на бортовые устройства управления каждого из локомотивов, которые оптимизируют процесс ведения как каждого поезда индивидуально, так и всех поездов на диспетчерском участке к первому, по его ходу движения, светофору с зеленым огнем при условии, что на втором светофоре, по его ходу движения, еще горит желтый огонь, согласно изобретению диспетчерский центр управления вычисляет расстояние до конца состава следующего впереди поезда суммированием приращений его координаты и по формуле S=V× Т1, скорость его движения по приращению координаты пройденного пути за один интервал времени между посылками данных с учетом данных электронной топографической карты участков пути по маршруту следования и по формуле: V=(L1+L2)/T, полученные данные о расстоянии до конца состава следующего впереди поезда и скорости его движения выбирает в порядке убывания точности для расчета времени смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда,
где: L1 - длина предыдущего блок-участка;
L2 - длина поезда;
Т - длительность занятого состояния предыдущего блок-участка;
Т1 - время движения по текущему блок-участку.
В части устройства технический результат достигается тем, что в системе для интервального регулирования движения поездов, содержащей на пути устройства трехзначной автоблокировки с рельсовыми цепями, соединенные с постовыми устройствами электрической централизации станций, ограничивающих перегон, и диспетчерский центр управления, в котором персональный компьютер автоматизированного рабочего места через линию магистральной связи соединен с постовыми устройствами электрической централизации, а через радиоканал цифровой связи соединен с бортовыми устройствами управления локомотивов поездов, вовлеченных в диспетчерское управление, на каждом из локомотивов бортовое устройство управления соединено с бортовым приемником спутниковой навигации, согласно изобретению в диспетчерском центре управления на автоматизированном рабочем месте установлен модуль вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения, входы которого подключены к линии магистральной связи с постовыми устройствами электрической централизации, вход/выход модуля вычисления и ранжирования данных соединен с выходом/входом процессора персонального компьютера автоматизированного рабочего места диспетчерского центра управления.
На чертеже представлена схема системы интервального регулирования движения поездов, реализующая предлагаемый способ.
Система для интервального регулирования движения поездов содержит на пути устройства 1 трехзначной автоблокировки с рельсовыми цепями, соединенные с постовыми устройствами 2 электрической централизации станций, ограничивающих перегон, и диспетчерский центр 3 управления, в котором персональный компьютер 4 автоматизированного рабочего места через линию 5 магистральной связи соединен с постовыми устройствами 2 электрической централизации, а через радиоканал 6 цифровой связи соединен с бортовыми устройствами 7 управления локомотивов 8 поездов, вовлеченных в диспетчерское управление, на каждом из локомотивов 8 бортовое устройство 7 управления соединено с бортовым приемником 9 спутниковой навигации, в диспетчерском центре 3 управления на автоматизированном рабочем месте установлен модуль 10 вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения, входы которого подключены к линии 5 магистральной связи с постовыми устройствами 2 электрической централизации, вход/выход модуля 10 вычисления и ранжирования данных соединен с выходом/входом процессора персонального компьютера 4 автоматизированного рабочего места диспетчерского центра 3 управления.
Система интервального регулирования движения поездов реализует предлагаемый способ следующим образом.
При нормальной работе системы, когда впереди идущий поезд передает данные о своем местоположении на блок-участке и текущую измеренную скорость своего движения, безопасные скорости и пространственные интервалы между попутно следующими поездами поддерживаются локомотивными бортовыми устройствами 7 управления совместно с устройствами 1 автоблокировки с рельсовыми цепями.
При автоблокировке с проходными светофорами напольные светофоры являются основным средством регулирования. Информация передается машинисту по оптическому каналу с использованием цвета и режима горения огней светофора. Для повышения безопасности движения в соответствии с Правилами технической эксплуатации железных дорог РФ системы автоблокировки дополняются устройствами АЛС. На пути в составе устройств 1 автоблокировки с рельсовыми цепями размещены путевые устройства кодирования АЛС (на чертеже не показаны), а бортовые устройства 7 управления локомотивов 8 имеют в своем составе локомотивные устройства непрерывной АЛС с автостопом (не показаны). Они могут иметь более сложные бортовые системы управления, включающие, в частности, устройства автоведения (не показаны).
Диспетчерский центр 3 управления взаимодействует по цифровому радиоканалу связи 6 с бортовыми устройствами 7 управления локомотивов 8, оборудованных устройствами для обмена цифровой управляющей информацией. На каждом из локомотивов 8, оборудованных современными системами управления, его бортовое устройство 7 управления непрерывно вычисляет текущие координаты местонахождения и скорость движения поезда. Определение координат осуществляется на основе данных, получаемых от бортовых приемников 9 спутниковой навигации с учетом поправок от имеющихся (на чертеже не показаны) в бортовом устройстве 7 управления датчиков пройденного пути и данных из электронной топографической карты участков пути по маршруту следования поезда. Базируясь на имеющейся в бортовом устройстве 7 управления программе автоведения информации о длине поезда, длине блок-участка по маршруту следования поезда и скорости поезда, бортовое устройство 7 управления периодически рассчитывает прогнозируемый момент времени освобождения очередного блок-участка и отсылает эти данные через радиоканал 6 цифровой связи в диспетчерский центр 3 управления, который на основе полученных данных передает по цифровому радиоканалу 6 связи на устройства 7 управления локомотивов 8 рассчитанное время смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда.
Если впереди идущий поезд не передает данные о своей скорости движения, но периодически передает измеренную по бортовому приемнику 9 спутниковой навигации координату Х текущего места нахождения локомотива 8 поезда, модуль 10 вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения рассчитывает менее точно оценку текущего расстояния до конца состава идущего впереди поезда и средней скорости его движения на очередном отрезке пути в интервале времени между посылками данных.
Расстояние до конца состава следующего впереди поезда определяется модулем 10 суммированием приращений координаты X. Текущая скорость определяется по приращению координаты пройденного пути за один интервал времени между посылками данных с учетом данных электронной топографической карты участков пути по маршруту следования поездов.
Если впереди идущий поезд не передает данные о своем местоположении на блок-участке, своем составе и скорости движения, средняя скорость рассчитывается по формуле:
V=(L1+L2)/T,
где:
L1 - длина предыдущего блок-участка;
L2 - длина поезда;
Т - длительность занятого состояния предыдущего блок-участка.
Оценка расстояния S, пройденного поездом от освобождения предыдущего блок-участка по текущему блок-участку за время Т1 движения по текущему блок-участку вычисляется по формуле:
S=V×T1
В обоих случаях точность вычислений повышается с уменьшением интервалов времени между приемами информации от предыдущего поезда.
Затем модуль 10 вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения выбирает из имеющихся полученных от локомотива рассчитанные по наиболее точной процедуре данные о расстояниях между соседними поездами и скоростях их движения и передает их в диспетчерский центр 3 управления, который на основе полученных данных передает на устройства 7 управления каждого из локомотивов 8 по цифровому радиоканалу 6 связи результаты вычислений времени смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда.
Во всех перечисленных случаях информация о расстоянии до конца состава и скорости впереди идущего поезда позволяет устройствам автоведения позади идущего поезда выработать оптимизированную стратегию автоведения поезда с учетом текущих приоритетов задач автоведения. Такими задачами могут быть:
поддержание заданного графика движения, уменьшение энергозатрат, повышение долговечности оборудования поезда и путевой инфраструктуры, повышение плавности движения для комфорта пассажиров и сохранности грузов и так далее.
Предлагаемый способ интервального регулирования и система для его реализации обеспечивают повышение эффективности автоведения поездов на перегоне при трехзначной АБ с проходными светофорами в различных ситуациях, отличающихся полнотой данных о движении поездов, поступающих в диспетчерский центр 3 управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интервального регулирования движения поездов и система для его реализации | 2018 |
|
RU2693357C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2008 |
|
RU2387563C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ВЫСОКОСКОРОСТНЫХ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2511748C1 |
| СИСТЕМА ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНАХ | 2014 |
|
RU2583397C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2011 |
|
RU2467905C1 |
| СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДОВ НА ОДНОПУТНОЙ ЖЕЛЕЗНОЙ ДОРОГЕ | 2008 |
|
RU2395423C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2385248C1 |
| Система управления распределенная автоматизированная для организации интервального регулирования движения поездов | 2021 |
|
RU2806570C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ОДНОПУТНОЙ ЖЕЛЕЗНОЙ ДОРОГЕ С ДВУХПУТНЫМИ ВСТАВКАМИ | 2009 |
|
RU2392152C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2015 |
|
RU2583987C1 |
Группа изобретений относится к области диспетчерского управления железнодорожным транспортом. В способе интервального регулирования движения поездов вычисляют расстояние до конца состава следующего впереди поезда суммированием приращений его координаты, и скорость его движения по приращению координаты пройденного пути. Полученные данные о движении поезда выбирают в порядке убывания точности, для расчета времени смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда. Система для реализации способа содержит устройства автоблокировки, устройства электрической централизации станций и центр управления. Компьютер центра управления соединен с устройствами электрической централизации и с бортовыми устройствами управления локомотивов, которые соединены с приемником спутниковой навигации. На автоматизированном рабочем месте центра управления установлен модуль вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения, который соединен с процессором персонального компьютера автоматизированного рабочего места. Достигается повышение эффективности использования устройств автоведения поезда. 2 н.п. ф-лы, 1 ил.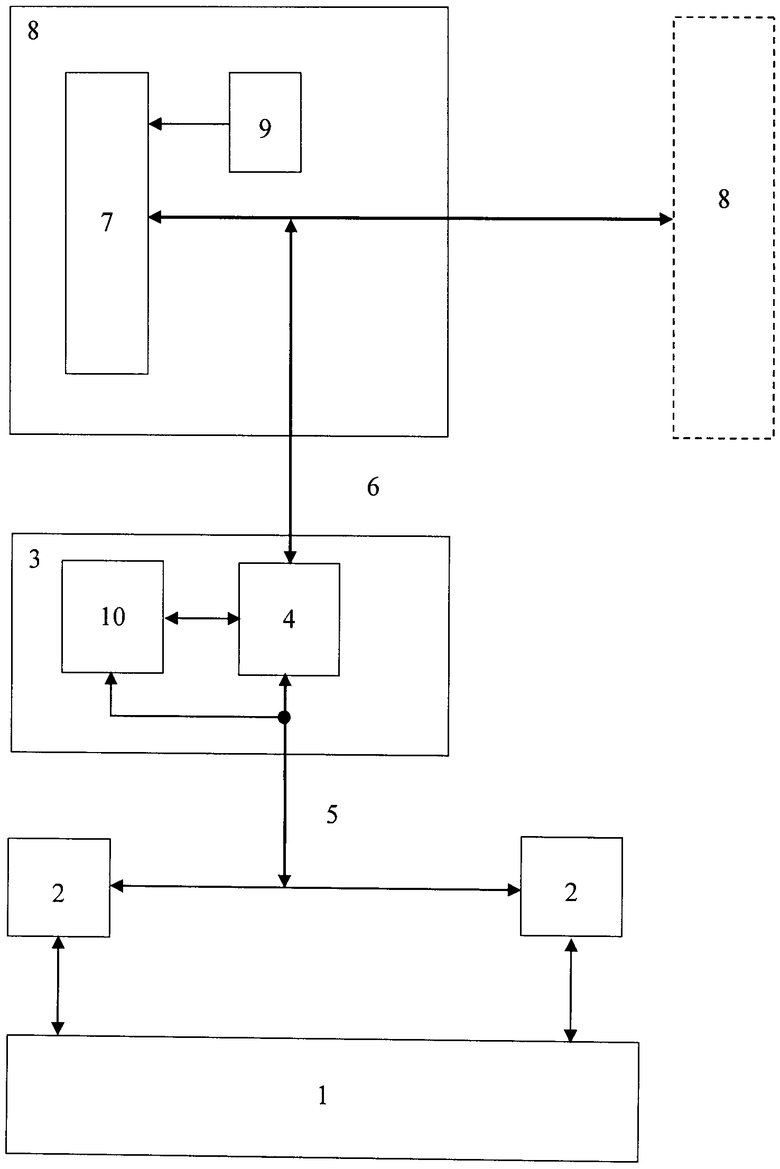
1. Способ интервального регулирования движения поездов при диспетчерской централизации и трехзначной автоблокировке с проходными светофорами, по которому осуществляют автоматическое поддержание локомотивными бортовыми устройствами управления совместно с устройствами автоблокировки безопасных скорости и интервала между попутно следующими на перегонах поездами, движение которых осуществляют под зеленый огонь первого по ходу движения поезда светофора на зеленый огонь второго по ходу движения поезда светофора, локомотивные бортовые устройства управления каждого поезда периодически рассчитывают прогнозируемый момент времени освобождения очередного блок-участка и передают эти данные в диспетчерский центр управления, который на их основе осуществляет вычисление времени смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда и передает результаты вычислений на бортовые устройства управления каждого из локомотивов, которые оптимизируют процесс ведения как каждого поезда индивидуально, так и всех поездов на диспетчерском участке к первому, по его ходу движения, светофору с зеленым огнем при условии, что на втором светофоре, по его ходу движения, еще горит желтый огонь, отличающийся тем, что диспетчерский центр управления вычисляет расстояние до конца состава следующего впереди поезда суммированием приращений его координаты и по формуле S=V×Т1, скорость его движения по приращению координаты пройденного пути за один интервал времени между посылками данных с учетом данных электронной топографической карты участков пути по маршруту следования и по формуле: V=(L1+L2)/T, полученные данные о расстоянии до конца состава следующего впереди поезда и скорости его движения выбирает в порядке убывания точности для расчета времени смены желтого огня на зеленый огонь на втором светофоре по ходу движения поезда,
где: L1- длина предыдущего блок-участка
L2 - длина поезда
Т - длительность занятого состояния предыдущего блок - участка
Т1 - время движения по текущему блок-участку.
2. Система для интервального регулирования движения поездов, содержащая на пути устройства трехзначной автоблокировки с рельсовыми цепями, соединенные с постовыми устройствами электрической централизации, станций, ограничивающих перегон, и диспетчерский центр управления, в котором персональный компьютер автоматизированного рабочего места через линию магистральной связи соединен с постовыми устройствами электрической централизации, а через радиоканал цифровой связи соединен с бортовыми устройствами управления локомотивов поездов, вовлеченных в диспетчерское управление, на каждом из локомотивов бортовое устройство управления соединено с бортовым приемником спутниковой навигации, отличающаяся тем, что в диспетчерском центре управления на автоматизированном рабочем месте установлен модуль вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения, входы которого подключены к линии магистральной связи с постовыми устройствами электрической централизации, вход/выход модуля вычисления и ранжирования данных соединен с выходом/входом процессора персонального компьютера автоматизированного рабочего места диспетчерского центра управления.
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2008 |
|
RU2387563C1 |
| Способ и долото для отбора ориентированного керна из бурящихся скважин | 1949 |
|
SU78757A1 |
| RU 2000979 C1, 15.10.1993 | |||
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |

