Изобретение относится к железнодорожному транспорту и может быть использовано в автоматизированных системах диспетчерского управления железнодорожным транспортом.
Известна система управления движением поездов, содержащая на пути устройства трехзначной автоблокировки с рельсовыми цепями, соединенные с постовыми устройствами электрической централизации, станций, ограничивающих перегон, и диспетчерский центр управления, в котором персональный компьютер автоматизированного рабочего места через линию магистральной связи соединен с постовыми устройствами электрической централизации, а через радиоканал цифровой связи соединен с бортовыми устройствами управления локомотивов поездов, вовлеченных в диспетчерское управление, на каждом из локомотивов бортовое устройство управления соединено с бортовым приемником спутниковой навигации, при этом в диспетчерском центре управления на автоматизированном рабочем месте установлен модуль вычисления и ранжирования данных о расстояниях между соседними поездами и скоростях их движения, входы которого подключены к линии магистральной связи с постовыми устройствами электрической централизации, вход/выход модуля вычисления и ранжирования данных соединен с выходом/входом процессора персонального компьютера автоматизированного рабочего места диспетчерского центра управления (RU 2509672, B61L 27/00, 20.03.14).
В известной системе в диспетчерском центре управления осуществляют вычисление расстояния до конца состава следующего впереди поезда и передачу этих данных на локомотивы каждого поезда на участке управления, обеспечивая тем самым возможность достижения максимальной пропускной способности, в том числе при высокоскоростном движении. Если впереди идущий поезд не передает данные о своем местоположении на блок-участке, о своем составе и скорости движения, то диспетчерский центр управления передает на локомотив последующего поезда команды по управлению движением, которые сохраняют максимально возможную пропускную способность в условиях неполной информации о параметрах движения первого поезда.
Однако на участках, где наблюдаются сбои в работе радиоканалов цифровой связи между локомотивами и центром диспетчерского управления, происходит снижение пропускной способности. В этом случае из-за полной потери на локомотиве актуальной информации, передаваемой центром диспетчерского управления для высокоскоростного движения, приходится производить снижение скорости движения высокоскоростного поезда до скорости ниже 160 км/час (скорости, максимально разрешенной для пассажирского поезда) при движении его под зеленый огонь путевого светофора при кодовой автоблокировке числового кода.
В качестве прототипа принята система управления движением поезда, содержащая комплексное локомотивное устройство безопасности с блоками автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, блок определения скорости движения локомотива и блок автоматического управления торможением поезда, первый и второй входы которого подключены соответственно к выходам блоков автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, вычислитель и анализатор работы блоков автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, причем первый и второй входы анализатора подключены соответственно к выходу блока автоматической локомотивной сигнализации непрерывного типа и к выходу блока многозначной автоматической локомотивной сигнализации, а его выход соединен с первым входом вычислителя, ко второму входу которого подключен выход блока определения скорости движения локомотива, при этом вход/выход вычислителя соединен с выходом/входом блока автоматического управления торможением поезда (RU 95621, B61L 3/20, 10.07.10).
В известной системе при потере на локомотиве информации для высокоскоростного движения из-за сбоев АЛС-ЕН снижение скорости движения высокоскоростного поезда до значений менее 160 км/час (максимально разрешенной при трехзначной автоблокировке) производится с допустимой по безопасности движения задержкой по времени. Задержка по времени производится в расчете на возможность восстановления нормальной работы АЛС-ЕН за время этой задержки. Во многих случаях это предотвращает лишние торможения поездов и повышает пропускную способность. Однако область применения известной системы для высокоскоростного движения ограничена только участками, уже оборудованными путевыми устройствами системы АЛС-ЕН.
Технический результат изобретения заключается в повышении устойчивости системы к сбоям в работе на локомотиве каналов приема информации для высокоскоростного движения и повышении пропускной способности.
Технический результат достигается тем, что в системе управления движением поезда, содержащей комплексное локомотивное устройство безопасности с блоками автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, блок определения скорости движения локомотива и блок автоматического управления торможением поезда, первый и второй входы которого подключены соответственно к выходам блока автоматической локомотивной сигнализации непрерывного типа и блока многозначной автоматической локомотивной сигнализации, анализатор работы блоков автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, первый и второй входы которого подключены соответственно к выходу блока автоматической локомотивной сигнализации непрерывного типа и к выходу блока многозначной автоматической локомотивной сигнализации, а его выход соединен с первым входом вычислителя, ко второму входу которого подключен выход блока определения скорости движения локомотива, при этом вход/выход вычислителя соединен с выходом/входом блока автоматического управления торможением поезда, согласно изобретению в комплексное локомотивное устройство безопасности введен приемо-передающий модуль, связанный через цифровой радиоканал связи с приемопередатчиком, соединенным с ЭВМ центра управления движением поездов, при этом выход приемо-передающего модуля соединен с третьим входом блока автоматического управления торможением поезда и с третьим входом анализатора.
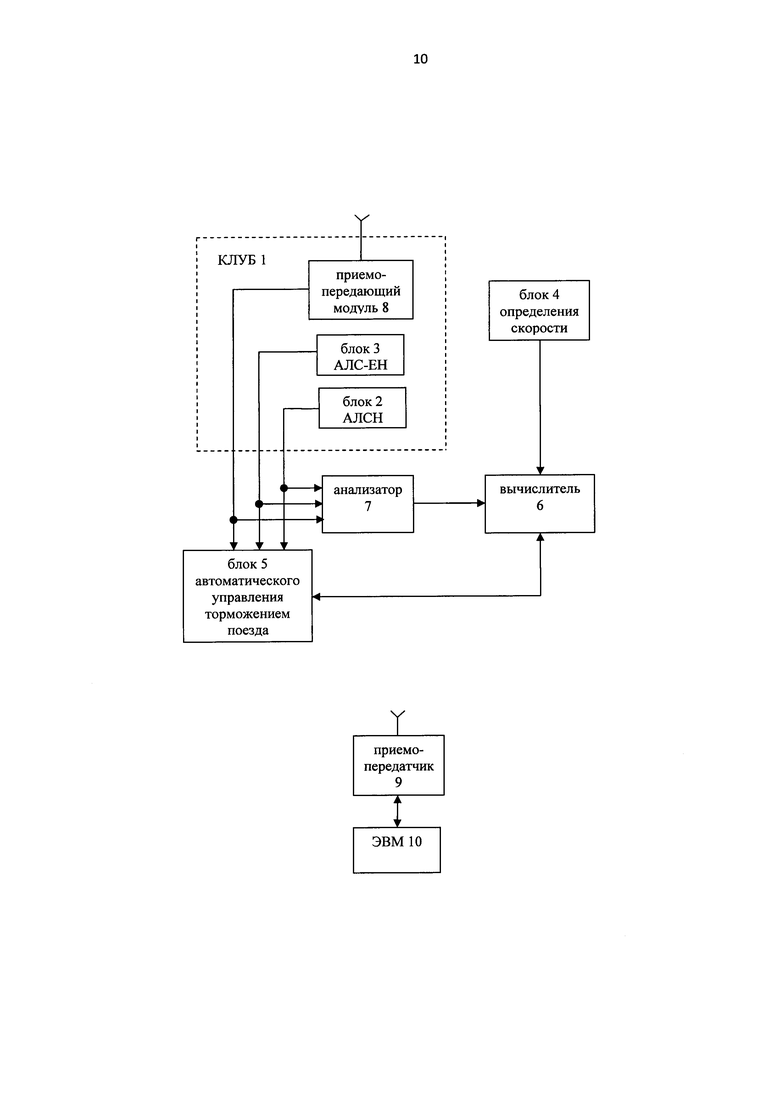
На чертеже приведена структурная схема предлагаемой системы управления движением поезда.
Система управления движением поезда содержит комплексное локомотивное устройство 1 безопасности (КЛУБ) с блоком 2 автоматической локомотивной сигнализации непрерывного типа (АЛСН) и с блоком 3 многозначной автоматической локомотивной сигнализации, блок 4 определения скорости движения локомотива, блок 5 автоматического управления торможением поезда, первый и второй входы которого подключены соответственно к выходам блока 2 автоматической локомотивной сигнализации непрерывного типа и блока 3 многозначной автоматической локомотивной сигнализации, вычислитель 6 и анализатор 7 работы блоков автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, причем первый и второй входы анализатора 7 подключены соответственно к выходам блока 2 автоматической локомотивной сигнализации непрерывного типа и блока 3 многозначной автоматической локомотивной сигнализации, а его выход соединен с первым входом вычислителя 6, ко второму входу которого подключен блок 4 определения скорости движения локомотива, вход/выход вычислителя 6 соединен с выходом/входом блока 5 автоматического управления торможением поезда. В комплексное локомотивное устройство 1 безопасности введен приемо-передающий модуль 8, связанный через цифровой радиоканал связи с приемопередатчиком 9, соединенным с ЭВМ 10 центра управления движением поездов, при этом выход приемопередающего модуля 8 соединен с третьим входом блока 5 автоматического управления торможением поезда и с третьим входом анализатора 7.
Система управления движением поезда функционирует следующим образом.
Сигналы блоков 2 и 3 поступают в блок 5 автоматического управления торможением, обеспечивая безопасное управление работой движущегося локомотива скоростного поезда. Одновременно информация блоков 2 и 3 поступает в анализатор 7, в котором осуществляется контроль передаваемых сигналов. Блок 3 контролирует свободность до пяти блок-участков впереди поезда, что необходимо для обеспечения скоростного движения, блок 2 передает информацию сразу о сигналах по пути следования, по которым машинист может заранее оценивать обстановку по выполняемому маршруту и своевременно увеличивать или уменьшать скорость, благодаря чему поезд может двигаться со значительно большей скоростью, не прибегая к резкому торможению. При одновременной работе блоков 2 и 3 выход анализатора 7 находится в отключенном положении и не вырабатывает импульса на включение вычислителя 6. При пропадании сигнала блока 3 анализатор 7 выдает сигнал на включение вычислителя 6, который по показаниям блока 2 начинает рассчитывать в каждой точке пути максимально возможную скорость движения, определяемую максимально допустимой интенсивностью прицельного служебного торможения локомотива до конца блок-участка, по которому движется поезд. С этой целью в вычислитель 6 из блока 4 определения скорости движения локомотива поступает информация о мгновенной скорости движения поезда, а из блока 5 автоматического управления торможением поступает информация о расстоянии до конца блок-участка (препятствия). Полученное в вычислителе 6 значение допустимой скорости движения поступает в блок 5 автоматического управления торможением. Если требуемое снижение скорости обеспечивается с запасом по расстоянию до конца данного блок-участка, то начало служебного торможения поезда задерживается на время, за которое этот запас исчерпывается.
На участках, где для дополнительного управления высокоскоростным движением используются цифровые радиоканалы связи, команды, передаваемые от ЭВМ 10 центра управления движением поездов, принимаются на каждом локомотиве высокоскоростного поезда приемо-передающим модулем 8. Эти команды поступают на третьи входы блока 5 автоматического управления торможением поезда и анализатора 7 и выполняются этими блоками в соответствии с приоритетами, установленными в них алгоритмами работы. Больший приоритет по безопасности движения имеют команды, формируемые блоками 2 и 3. Если системами самодиагностики регистрируются сбои в работе какого-либо из блоков 2, 3 или приемо-передающего модуля 8, то команды от неисправно работающих блоков не передаются в блок 5 автоматического управления торможением поезда и в анализатор 7.
На участках, где отсутствуют путевые устройства системы АЛС-ЕН, приемо-передающий модуль 8 может передавать в блок 3 через системный интерфейс комплексного локомотивного устройства 1 безопасности (на чертеже не показан) информацию для высокоскоростного движения, аналогичную информации от путевых устройств АЛС-ЕН и использовать ресурсы блока 3 для обработки этой информации либо просто передавать в блок 5 автоматического управления торможением поезда и анализатор 7 команды от ЭВМ 10 центра диспетчерского управления движением поездов.
Если в работе приемо-передающего модуля 8 из-за помех в цифровых радиоканалах связи происходят сбои, то в предлагаемой системе в отличие от известного решения немедленное служебное торможение не происходит из-за параллельной нормальной работы АЛС-ЕН. Если параллельно АЛС-ЕН тоже не работает, то в ряде эксплуатационных ситуаций торможение задерживается.
Однако при этом блок 5 автоматического управления торможением и анализатор 7 используют другие (по сравнению с прототипом) алгоритмы, поскольку восстановление нормальной работы цифровых радиоканалов связи имеет другие временные характеристики и связанные с работой ЭВМ 10 центра управления движением поездов эксплуатационные ситуации имеют свою специфику. Здесь важной эксплуатационной ситуацией является, например, такая, когда сбой в работе приемо-передающего модуля 8 на участке без путевых устройств АЛС-ЕН происходит при движении поезда со скоростью в диапазоне 160-180 км/час и до сбоя - блок 5 автоматического управления торможением поезда имел информацию, что перед поездом имеется два полностью свободных блок-участка, кроме свободного остатка текущего блок-участка. Алгоритм работы блока 5 автоматического управления торможением поезда для этой эксплуатационной ситуации предусматривает задержку служебного торможения (если поезд уже не находится в состоянии торможения) на одну минуту (или менее) до момента вступления поезда на следующий блок-участок. Если нормальная работа приемо-передающего модуля 8 успеет за это время восстановиться, то торможение не происходит. Этот и подобные алгоритмы используют нормированные временные задержки на включение торможения, обоснованные для соответствующих категорий поездов и условий их движения, на основе имитационного моделирования с проверкой соблюдения требований по безопасности движения поездов.
Такое имитационное моделирование производится заранее и обоснованные им нормы задержек вносятся в постоянную память блока 5 автоматического управления торможением поезда и анализатора 7.
Введение задержек на торможение повышает пропускную способность и устойчивость высокоскоростного движения аналогично тому, как это предусмотрено в прототипе при парировании сбоев системы АЛС-ЕН.
Предложенная система управления движением поезда обеспечивает более высокую степень взаимного резервирования каналов приема на локомотиве информации для высокоскоростного движения на участках, где одновременно работают путевые устройства АЛС-ЕН и на локомотивах осуществляется прием информации для высокоскоростного движения, передаваемой из центра диспетчерского управления по радиоканалам цифровой связи.
Таким образом, изобретение позволяет повысить пропускную способность участков за счет более высокой устойчивости системы к сбоям в работе на локомотиве каналов приема информации для высокоскоростного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Локомотивное устройство управления движением поезда | 2016 |
|
RU2629582C1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2023 |
|
RU2818401C1 |
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2013 |
|
RU2534084C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте. Система содержит комплексное локомотивное устройство безопасности с блоками автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, блок определения скорости движения локомотива и блок автоматического управления торможением поезда, анализатор работы блоков сигнализации, вычислитель, блок определения скорости движения локомотива. Причем в комплексное локомотивное устройство безопасности введен приемо-передающий модуль, связанный через цифровой радиоканал связи с приемопередатчиком, соединенным с ЭВМ центра управления движением поездов, а выход приемо-передающего модуля соединен с входом блока автоматического управления торможением поезда и с входом анализатора. Достигается повышение надежности и повышение пропускной способности. 1 ил.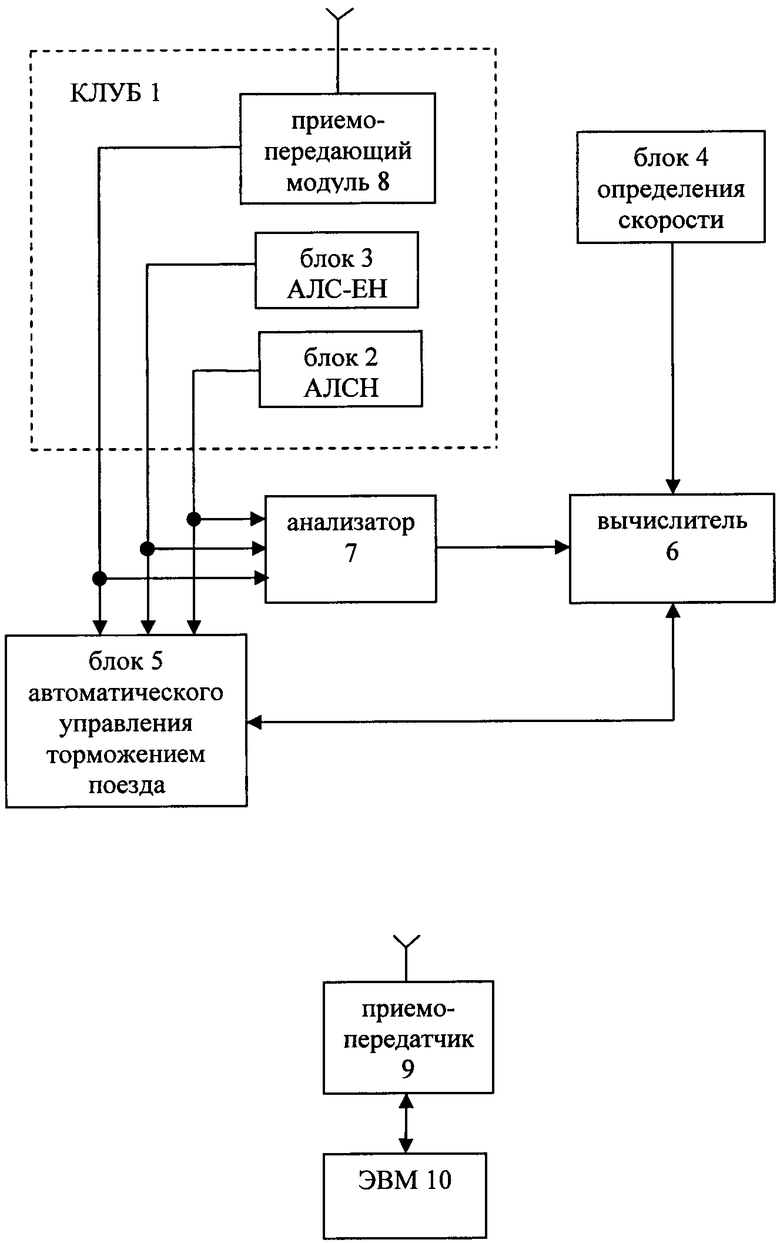
Система управления движением поезда, содержащая комплексное локомотивное устройство безопасности с блоками автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, блок определения скорости движения локомотива и блок автоматического управления торможением поезда, первый и второй входы которого подключены соответственно к выходам блока автоматической локомотивной сигнализации непрерывного типа и блока многозначной автоматической локомотивной сигнализации, анализатор работы блоков автоматической локомотивной сигнализации непрерывного типа и многозначной автоматической локомотивной сигнализации, первый и второй входы которого подключены соответственно к выходу блока автоматической локомотивной сигнализации непрерывного типа и к выходу блока многозначной автоматической локомотивной сигнализации, а его выход соединен с первым входом вычислителя, ко второму входу которого подключен выход блока определения скорости движения локомотива, при этом вход/выход вычислителя соединен с выходом/входом блока автоматического управления торможением поезда, отличающаяся тем, что в комплексное локомотивное устройство безопасности введен приемо-передающий модуль, связанный через цифровой радиоканал связи с приемопередатчиком, соединенным с ЭВМ центра управления движением поездов, при этом выход приемо-передающего модуля соединен с третьим входом блока автоматического управления торможением поезда и с третьим входом анализатора.
| Высокочастотный кабель однокабельной системы связи | 1952 |
|
SU95621A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2011 |
|
RU2468951C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| US 20030236598 A1, 25.12.2003. | |||

