Изобретение относится к весоизмерительной технике, предназначено для взвешивания железнодорожных вагонов, чугуновозных ковшей и т.п. объектов и является усовершенствованием устг ройства по авт.св. № IJ83839.
Известно устройство для взвешива- ния движущихся объектов, содержащее силоизмерительный преобразователь встроенный в весовую платформу, путевые датчики, микропроцессорное вычислительное устройство (МВУ), блок памяти, счетчик с устройством управления, два регистра и два устройства
сравнения. Силоизмерительный преобразователь подключен к входу МВУ и выходу блока памяти, вход которого соединен с выходом МВУ. Выходы устройств сравнения соединены с информационными входами устройства управления счетчиком, управляющий вход которого подключен к путевым датчикам первый выход соединен с входом прерывания МВУ, а второй - с первым входом счетчика, второй и третий входы последнего соединены с синхронизирующим выходом МВУ и выходом первого регистра соответственно. Выход счетчика подключен к входу МВУ и объединенным входам устройства сравнения, вторые входы которых соединены с выходами соответствующих регистров, входами соединенных с выходом МВУ.
Известное устройство осуществляет подавление динамической помехи, возникающей при взвешивании движущихся объектов, путем ее цифровой фильтрации СП.
Недостаток известного устройства заключается в низкой точности взвешивания негруженных вагонов (тары).
Причина этого состоит в том, что частота помехи, возникающая при взвешивании негруженного вагона, существенно вьше (в 1,5-2 раза) частоты помехи, возникающей при взвешивании груженного вагона. Поэтому при той же частоте дискретизации входного сигнала увеличивается погрешность в определении координат и собственно значении горбов входного сигнала, а значит возрастает искажение в обрабатываемом сигнале за счет воспроизведения дополнительного числа промежутков между горбами.
Целью изобретения является повышение точности взвешивания негружен
5
0
0
.
ного объекта за счет более полного подавления помехи.
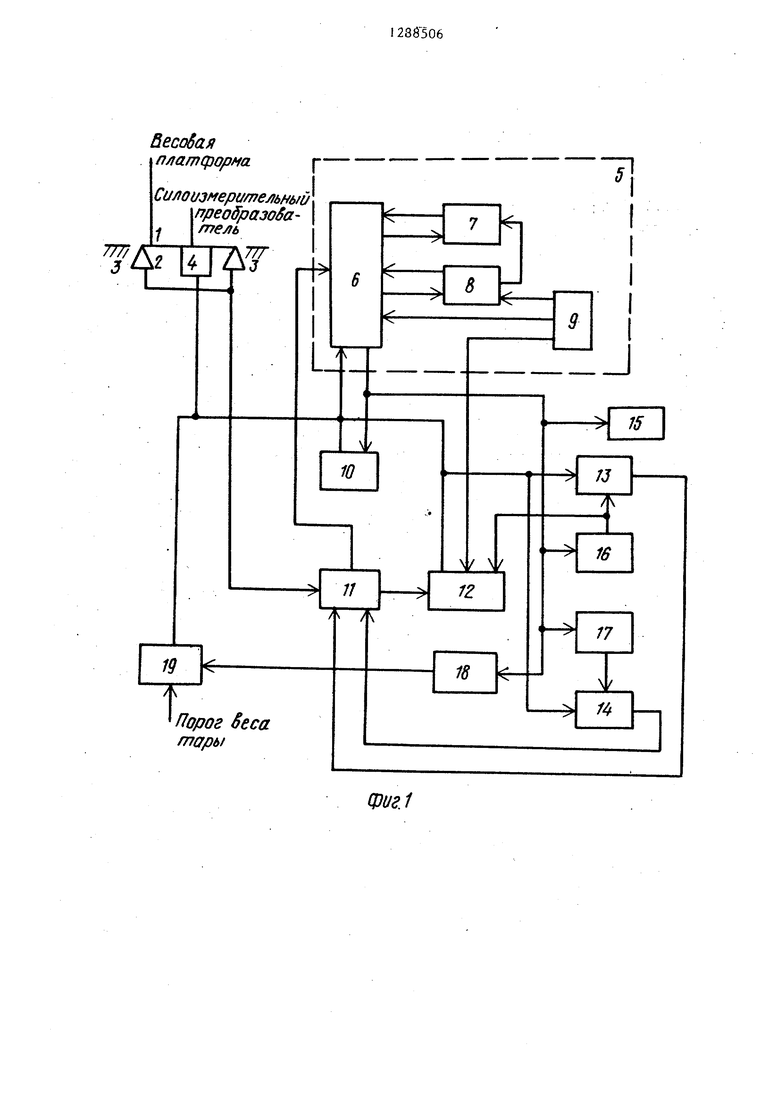
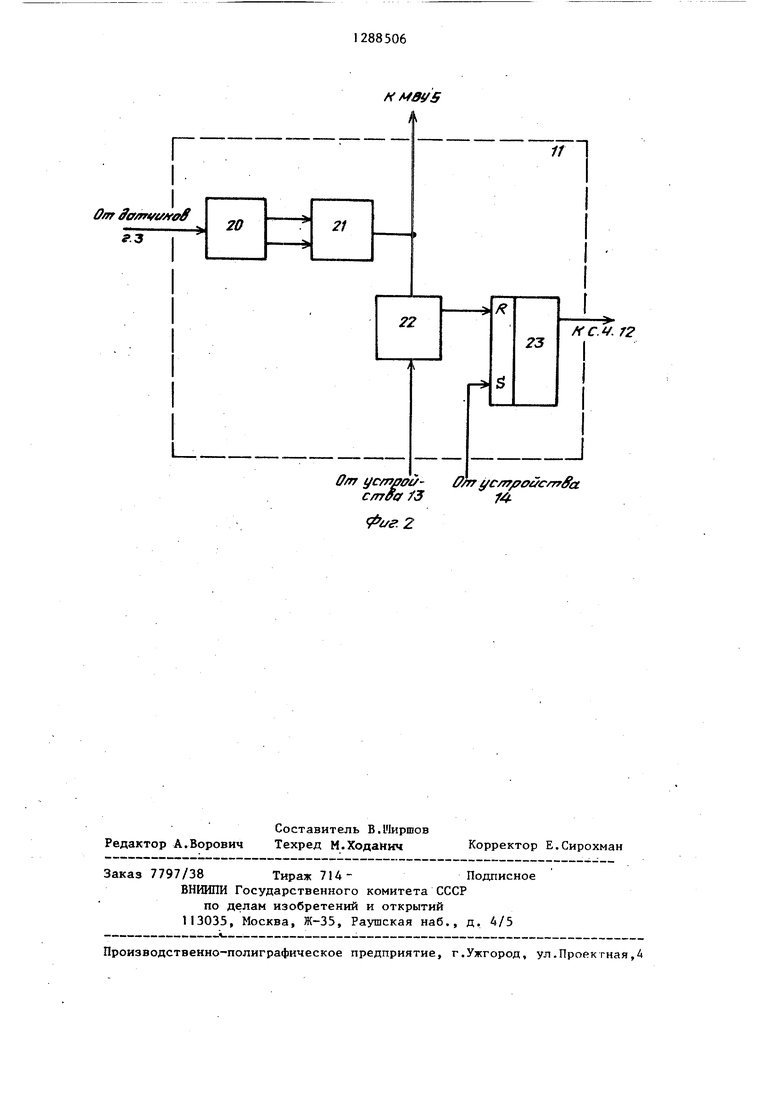
На фиг.1 представлена блок-схема устройства для взвешивания движущихся объектов; на фиг.2 - блок-схема устройства управления счетчиком.
Устройство содержит весовую плат- I , путевые датчики 2 и 3, си- лоизмерительный преобразователь А, встроенный в платформу, МВУ 5, в которое входит центральный процессор (1Ш) 6, постоянное запоминающее уст-i ройство (ПЗУ) 7, устройство, 8 управления (УУ) и синхронизатор (Сх) 9. Информационный вход МВУ 5 соединен с выходами силоизмерительного преобразователя 4 и блока 10 памяти. Вход прерывания МВУ 5 соединен с выходом устройства 11 управления счетчиком, управляющий вход которого подключен к путевым датчикам 2 и 3, а выход - к первому входу счетчика 12, второй вход которого соединен с синхронизирующим выходом МВУ 5, а выход подключен ко входу МВУ 5 и первым входам устройства 13 и 14 сравнения.
Выход МВУ 5 подключен к входу блока 10 памяти, к индикатору 15 и входам регистров 16-18.
Выходы регистров 16 и 17 подключены к вторым входам устройств 13 и 14 сравнения соответственно, выходы которых подключены к информационным входам устройства 1I управления счет- чиком. Выход регистра 16 соединен также с третьим входом счетчика 12. Выход третьего регистра 18 подключен к входу третьего устройства I9 сравнения, другой вход которого предназначен для ввода порогового значения веса I железнодорожной платформы с незагруженным ковшом (тары), а выход соединен с входом МВУ 5.
Устройство управления счетчиком (фиг.2) содержит счетчик 20, дешифратор 21, схему ИЛИ 22 и триггер 23.
Вход счетчика 20 соединен с выхо-, дом путевых датчиков 2 и 3, а выходы - с входами дешифратора 21, выход которого подключен к входу прерывания МВУ 5, и к одному входу схемы ИЛИ 22, другой вход которой соединен с выходом устройства 13 сравнения, а выход подключен к R-входу триггера 23, S-вход которого соединен с выходом устройства 14 сравнения, выход триггера 23.соединен с первым входом счетчика 12.
0
5
0
55
3,1288506
Устройство работает следующим об
разом.
При наезде колеса на весовую плаформу 1 срабатывает путевой датчик по сигналу с которого запускается устройство I1 управления счетчиком, вырабатывающее сигнал прерывания, поступающий на МВУ 5.
По этому сигналу начинает работать программа обработки информации записанная в ПЗУ 7 и выбираемая в Ц 6 сигналами устройства 8 управления
По этой программе с преобразователя А через вход данных в МВУ 5 прнимается информация об измеряемом в се с периодом опроса, соответствующим частоте дискретизации.
Все дискретные отсчеты веса записываются в блок IО памяти и одновременно путем сравнения соседних отсчетов и их адресов- в ЦП 6 производится поиск экстремумом (горбов входного сигнала. Адреса ячеек блока 10 памяти, в которых записаны знчения экстремумов N и N заноМчКС ПИН
сятся соответственно в регистры I6 и 17.
По сигналу с путевого датчика 3, сигнализирующему о съезде колеса с весовой платформы 1, устройство 11 управления счетчиком вырабатывает сигнал, по которому ЦП 6 переводится на вьлюлнение подпрограммы цифровой фильтрации, алгоритм которой записан в ПЗУ 7.
Каждый второй сигнал с путевых датчиков, сигнализирующий о съезде колеса с весовой платформы, делится счетчиком 20 с дешифратором 21 и используется как сигнал прерывания МВ 5. Одновременно он сбрасывает в О RS-триггер 23, выход которого переводит счетчик 12 в режим вычитания . В дальнейшем сигналы с выходов устройств 13 и 14 управля19т RS-триг гером, а значит и режимом работы счетчика I2 (вычитание - суммирование ) .
В устройстве используется алгоритм нерекурсивного цифрового фильтра с окном Дальфа-Чебышева, в котором постоянная составляющая определяется по форме М-1
0 (Н
где W
1
N
К 0
N-I
V.--0
W(k);
O
0
5
N - число отсчетов в окне наблюдения ; x(k) - временные отсчеты входного
сигнала;
W(k) - временные отсчеты окна-; у - постоянная составляющая.
При прохождении вагона по весовой платформе возникает динамическая помеха, частота которой, кроме прочих факторов, зависит от массы вагона. Например, по экспериментальным данным собственная частота вагонов различной массы при ее уменьшении (от массы груженных восьмиосных до пусть четырехосных вагонов) увеличивается от 3,5 до 7,5 Гц.
В то же время, при скорости движения вагонов 10-15 км/ч в измеряемый сигнал соответственно укладывается 2-1,5 периода помехи, соответствующей колебаниям груженного вагона, что недостаточно для качественного ее подавления, и 4-2,5 периода помехи, соответствующей колебаниям негруженного (пустого) вагона.
В предлагаемом устройстве при измерении веса железнодорожной платформы с незагруженным ковшом цифровой фильтрации подвергается реальный входной сигнал, содержащий помеху с частотой 5,5-7,5 Гц, достаточной для того, чтобы в окно наблюдения фильтра попадало требуемое количество периодов помехи. Так, тля требуемого 5 подавления в 40-50 дБ в используемом фильтре необходимо обработать 2,3- 3 периода помехи.
Это достигается тем, что определение веса движущегося объекта осуществляется в два этапа.
На первом этапе определение веса осуществляется в предположении, что взвешивается груженный объект и в окне наблюдения не достает периодов 5 помехи, т.е. после перевода ЦП 6 на подпрограмму цифровой фильтрации устройство I1 управления счетчиком вырабатывает сигнал, по которому в счетчик 12 .записывается код-адреса
0
0
0 I
5
первого экстремума N из регистра 16, после чего счетчик 12 переводится в режим суммирования импульсов с синхронизирующего выхода ИВУ 5.
При наращивании содержимого счетчика 12 от начального значения N на его выходе формируются .адреса ячеек блока 10 памяти, в которых записаны дискретные отсчеты измеренного
входного сигнала, которые выбираются в ЦП 6, где подвергаются цифровой фильтрации.
Одновременно текущий код адреса с выхода счетчика сравнивается в уст ройство 14 сравнения с адресом N , по достижению которого оно вьфабатн- вает сигнал, переводящий счетчик 12 в режим вычитания, и выборка дискреных значений входного сигнала из блока 10 памяти осуществляется в обратном направлении от N, да N , при достижении которого устройство 13 сравнения вырабатывает сигнал, по которому устройство 11 управления - счетчиком переводит счетчик 12 в режим суммирования, и цикл повторяется
Таким образом, набирается коли- чество периодов помехи, требуемое для ее фильтрации при взвешивании груженного объекта. Отфильтрованный от помехи сигнал, соответствующий весу объекта, запоминается в регист-- ре J6.
На втором этапе производится срав нение измеренного веса с пороговым значением, соответствующим весу железнодорожной платформы с незагружен
ным ковщом, задаваемым, например, с ручного задатчика на вход устройства 19 сравнения.
Входной сигнал устройства 19 сравнения анализируется программным путем в МВУ 5. Например, сигнал логической 1 на выходе устройства 19 соответствует тому, что измеренный вес превышает пороговое значение (т.е. ковш загружен). При этом вес индицируется на индикаторе 15 и процесс взвешивания завершается.
fO
15
20
25
30
35
40
Если вес меньше порогового значения (на выходе устройства сравнения 19 сигнал логического 0)j вновь выполняется подпрограмма цифровой фильт- I рации, но при этом обработке подвергаются отсчеты реального входног.о сигнала (без искусственного дополнения до требуемого количества перио-, дов помехи), хранящиеся в блоке 10 памяти и выбираемые процессором ЦП 6.
Отфильтрованный сигнал, соответствующий весу железнодорожной платформы с незагруженным ковшом, инди- . цируется на индикаторе 15, чем заканчивается второй этап взвешивания. I Таким образом, повышается степень подавления динамической помехи, возникающей в случае взвешивания двия;ущегося негруженного объекта, т.е. повышается точность измерения его веса, а значит и точность определения веса нетто груза.
Формула изобретения
Устройство дня взвешивания движущихся объектов по авт.св.№ 1183839, отличающееся тем, что, с целью повьшения точности взвешивания негруженного объекта, оно снабжено третьим регистром и третьим устройством сравнения с двумя входами, причем вход третьего регистра -соединен с выходом шкpoпpoцeccopнoгo вычислительного устройства, а его выход подключен к одному из входов третьего устройства сравнения, выход которого соединен с входом микропроцессорного вычислительного устройства.
ТГ7/
Кесобая платформа
Силоизмеришемнб/й npeoi pa3oSa- те ль
т
Дг ИЛУ
t
Порог Seca тары
фиг.1
OfTT ycmffff - c/rrffcf /J
ife.2
Редактор А.Ворович
Составитель В.Ширшов Техред М.ХодаНич
Заказ 7797/38 Тираж 7 4-Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,Д
ff/rr f/C/77/7 /C/r7ffat n
Корректор Е.Сирохман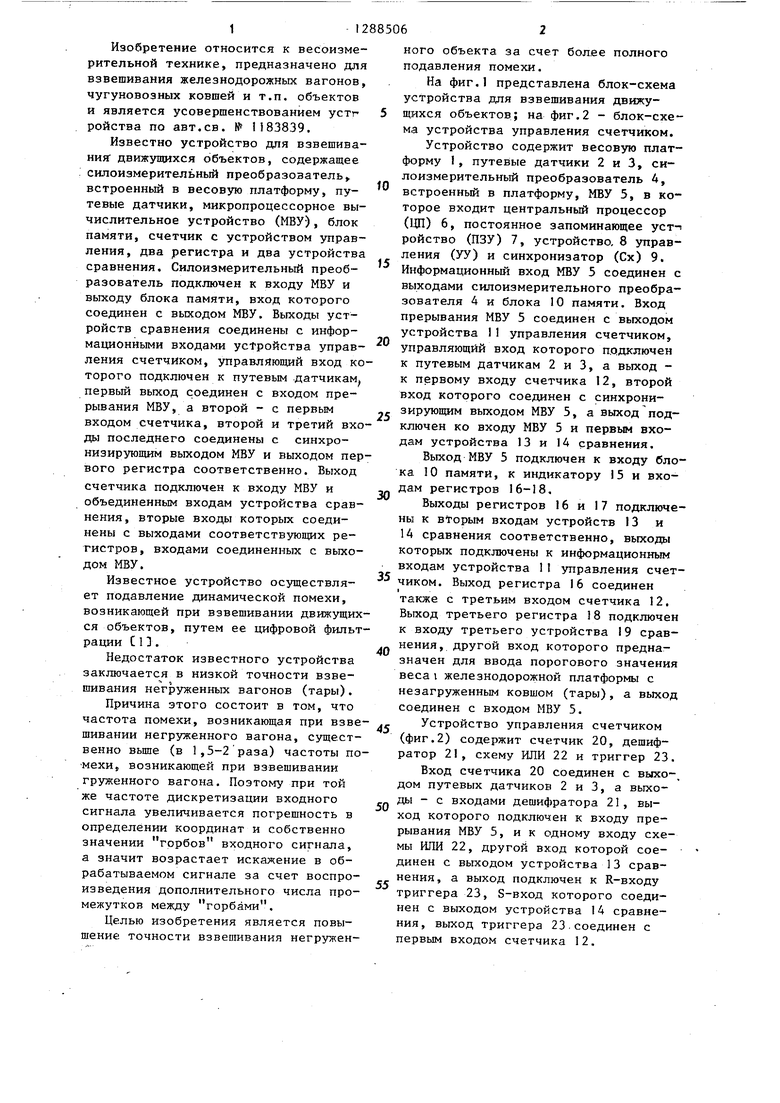
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для повагонного взвешивания транспортных объектов на ходу | 1981 |
|
SU991176A1 |
| Устройство для взвешивания | 1986 |
|
SU1362944A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
Изобретение относится к весоизмерительной технике, предназначено для взвешивания объектов. Цель изобретения - повышение точности взвешивания нагруженного объекта за счет подавления помехи. При измерении веса железнодорожной платформы с незагруженным ковшом цифровой фильтрации подвергается реальный входной сигнал, содержащий помеху с частотой 5,5-5,7 Гц, достаточной для того, чтобы в окно наблюдения фильтра попадало требуемое количество периодов помех. Для требуемого подавления 40- 50 дБ в фильтре обрабатывают 2,3-3 периода помехи. Изобретение дополнительное к основному авт.ев.№ II83839. 2 ил. о (Л KD сх 00 СП о ot No
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
