Изобретение относится к области технической диагностики и неразрушающего контроля с применением метода акустической эмиссии (АЭ) и направлено на повышение точности при определении координат (локации) шумоподобных источников АЭ во время диагностирования, оценки состояния и ресурса объектов контроля (ОК). К задачам подобного вида относятся выявление мест износа и разрушения узлов трения; поиск дефектов «обвязки» компрессорного и насосного оборудования; определение мест утечек продукта на емкостном оборудовании (герметичности); выявление активных мест объектов, работающих на переменных токах / магнитных полях (трансформаторы, электродвигатели); изучение затухания и трансформации волн в объекте контроля и т.п.
Известными основными методами пассивной локации источников АЭ в настоящее время являются: зонный, триангуляционный, угловой, линейный и дисперсионный [1-7 и др.]. Принципиальное различие в методах основано на:
- построении антенных групп преобразователей акустической эмиссии (ПАЭ);
- связи ПАЭ с выбранной системой координат (декартовой или полярной);
- составлении и решении аналитических соотношений связывающих: координаты ПАЭ; координаты источника АЭ; скорость распространения мод акустических волн; затухание мод акустических волн и временные задержки прихода сигналов на различные ПАЭ антенной группы (разность времен прихода - РВП).
Несмотря на принципиальное отличие основных методов локации по способу получения первичной информации их можно разделить всего на две большие группы: амплитудные и корреляционные.
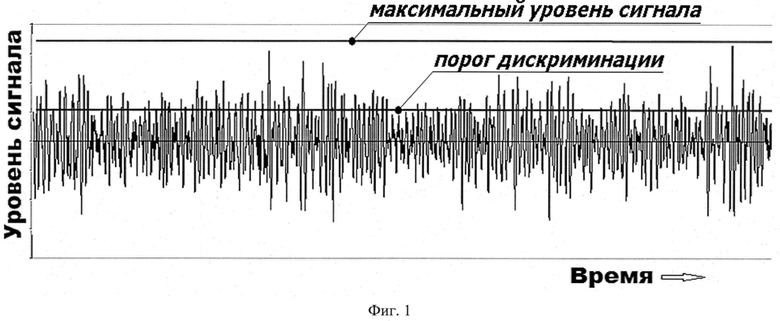
Известно, что в амплитудных способах определяют либо затухание пиковой амплитуды, либо разность времен прихода между фронтами или пиками амплитуд сигналов, зарегистрированных разными каналами АЭ аппаратуры при их превышении заданного уровня дискриминации. Сигнал АЭ от «полезных» шумоподобных источников, как правило, представляет собой непрерывное колебание с варьированием амплитуды выбросов в пределах 2-4 дБ (фиг.1), что затрудняет выделение событий пороговым методом по превышению сигналом некоторого заданного уровня дискриминации. Кроме того, из-за отсутствия явно выраженной формы импульсов АЭ, становится невозможным использование общепринятых параметров временной селекции (ИКД - интервал контроля длительности, ИКК - интервал контроля конца и ИКП - интервал контроля пика сигналов АЭ). Таким образом, использование известных амплитудных способов для локации шумоподобных источников АЭ приводит к заполнению локационных карт ложными событиями (фиг.5а), что исключает возможность определения истинного места положения искомого шумоподобного источника АЭ.
Известные корреляционные способы основаны на анализе изменения амплитудно-временной функции (АВФ) и направлены на определение разности времен прихода (РВП) по максимуму функции кросс-корреляции (или взаимной корреляции) АВФ АЭ. Однако их применение ограничено из-за невозможности учета неизбежных искажений АВФ сигнала АЭ при: распространении волны по объекту контроля от источника до ПАЭ; преобразовании акустических колебаний в электрические и их последующем усилении; оцифровке электрических колебаний. Следовательно, чем дальше разнесены ПАЭ в антенной группе, чем сложнее вид антенной решетки (т.е. чем сложнее форма объекта контроля) и чем больше разница между техническими характеристиками аппаратной части многоканальной АЭ-системы, тем менее подобны друг другу будут кривые АВФ АЭ различных каналов. В связи с этим в известных нам работах для получения корректных результатов с помощью волновых способов (основанных на Фурье и Вейвлет преобразовании) вводятся ряд ограничений:
- контроль только линейных объектов (трубопроводы, полосы металла и т.д.);
- анализ АВФ АЭ только тех компонент, которые наименее подвержены частотно-зависимым искажениям (низкочастотные составляющие);
- размещение ПАЭ только вблизи друг от друга (добиваясь минимальной разницы в акустических трактах каналов регистрации).
Таким образом, ни один из известных нам способов локации не позволяет выделить участки АВФ АЭ на различных каналов регистрации АЭ, принадлежащих одному событию (физическому процессу), что при определении координат шумоподобных источников АЭ не позволяет использовать произвольный вид антенных решеток (ограничивает номенклатуру объектов контроля), снижает точность расчета ключевых параметров методов локации (амплитуды или РВП) или делает данную задачу невыполнимой методом АЭ.
Задачей, на решение которой направленно изобретение, является повышение точности существующих методов локации при определении координат шумоподобных источников АЭ.
Указанная задача решается путем применения универсального алгоритма предварительной обработки АВФ АЭ, встраиваемого в существующие методы локации, с целью выделения участков на АВФ, полученных по различным акустическим трактам АЭ-системы, принадлежащих одному событию (физическому процессу) для последующего определения ключевых параметров методов локации (амплитуды или РВП) на этих участках АВФ АЭ.
Предлагаемый способ, заключающийся в том, что участки АВФ АЭ, принадлежащие одному событию (физическому процессу), выделяют на основе совместного анализа их спектрально-временного самоподобия, отличается тем, что в режиме реального времени или при постобработке данных АЭ события устанавливают на участках АВФ по подобию их кривых спектральной плотности, а принадлежность одному событию выявляют на основе сравнения временных функций проявления источника АЭ.
Устройством, с помощью которого осуществим предлагаемый способ, является любой одно- или многоканальный акустико-эмиссионный комплекс, имеющий в своем составе: широкополосные или полосовые преобразователи акустической эмиссии (ПАЭ), усилители (предварительный и/или основной), средства коммуникации (проводные и/или беспроводные), аналого-цифровой преобразователь (АЦП) и устройство с заданным алгоритмом обработки, вывода информации и принятия решений, например ЭВМ. При создании автоматических следящих систем в состав устройства могут входить платы сопряжения, средства коммуникации, сервоприводы, исполнительные механизмы в зависимости от поставленной задачи.
Способ осуществляется следующим образом (фиг.2). На первом этапе стандартно для испытаний ОК с применением метода АЭ [8 и др.] определяют: коэффициент затухания сигнала в материале объекта контроля (5); максимальное расстояние между ПАЭ в антенной группе (L); скорость распространения акустической волны (С); тип конфигурации антенной решетки для локации (зонная, линейная, треугольная, прямоугольная и т.д.) и время задержки между каналами регистрации АЭ (At) от импульсного имитатора АЭ.
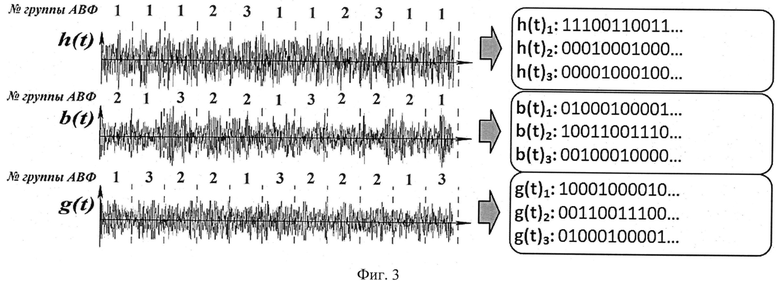
Далее проводится одновременная запись АВФ по всем каналам регистрации АЭ. Запись АЭ может быть произведена разными способами, но в итоге должна представлять собой последовательные участки (которые еще можно назвать: кадры, фреймы) АВФ (фиг.3). При разбивке записи АВФ на кадры и при определении длительности АЭ контроля (времени записи АВФ - TREC) необходимо учитывать особенности сигналов от источника АЭ, а также время его существования или проявления. При отсутствии таких данных для большинства источников АЭ при настройке АЭ аппаратуры и определении длительности сбора АЭ данных подходит система настроек (1).
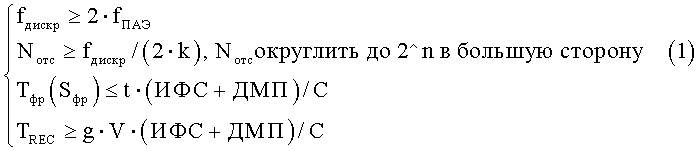
где fдискр - частота дискретизации АЦП (Гц); fПАЭ - максимальная рабочая частота ПАЭ (Гц); Nотс - количество отсчетов в кадре (фрейме); k - коэффициент разрешающей способности по частоте (Гц на отсчет); Тфр - длительность фрейма (с), при делении записи на кадры плавающим окном Тфр=Sфр; Sфр - шаг сдвига фрейма при реализации плавающего окна (Sфр≤Δt); t - коэффициент разрешающей способности по РВП, принимается t<1 и характеризует количество Тфр, приходящихся на ИФС; ИФС - интервал формирования события, в общем случае ИФС равен расстоянию между ПАЭ (м); ДМП - допуск на максимальный пробег, допуск на отклонение формы ОПО от «правильной» формы антенной решетки (м); V - время чувствительного изменения контролируемого процесса (время падения уровня, давления, время износа и т.д.); g - статистический коэффициент, определяющий количество выборок данных для построения локационных серий; С - скорость распространения волны в материале (м/с).
Распознавание событий в кадрах АВФ АЭ проводится в спектральной области. Спектральный анализ может быть основан на Фурье или Вейвлет преобразовании записи АЭ и их модификаций (быстрой частотной или при перекрытии кадров с помощью частотно-временной модификации), с помощью которых рассчитывается спектр мощности G(f) для каждого кадра АВФ. Для получения состоятельной оценки функции G(f) сглаживаются плавающим окном.
Далее кадры внутри одного канала регистрации АЭ объединяются в группы по степени схожести формы кривых G(f). Чтобы результаты статистического сравнения G(f) не зависели от мощности, площадь под кривой G(f) нормируется на полную мощность (W):
Тем самым получают нормированные функции спектральной плотности мощности 

В качестве критерия степени схожести (подобия) функций 
Спектры кадров АВФ АЭ признаются подобными, если при их сравнении величина коэффициента подобности превышает некоторое пороговое значение: KПД≥[KПД]. Если KПД<[KПД], формируется новая группа, количество формируемых групп регулируется значением [KПД] исходя из представления физики искомого процесса и количества предполагаемых источников АЭ. В испытаниях с шумоподобными процессами для выявления минимального отличия в спектре сигналов пороговое значение [Кпд] требуется задавать в диапазоне от 30% (механические испытания материалов, аэрогидродинамические процессы) до 95% (трибологические процессы). Сравнение спектрограмм завершается закреплением номера группы за каждым кадром АВФ (фиг.3) с созданием спектрального образа каждой группы 
Выявление искажения АВФ между каналами регистрации АЭ, входящих в антенную группу, основывается на описанном выше способе, но путем сравнения спектральных образов групп 
Если группы по разным каналам с одинаковыми номерами признаются подобными, то можно считать, что искажения по разным акустическим каналам (акустическим трактам) минимальны (не критические) и можно переходить к определению ключевых параметров методов локации (амплитуды сигналов или их РВП).
Если группы по разным каналам регистрации с одинаковыми номерами не признаются подобными, то искажения АВФ критические и требуется установить принадлежность групп разных каналов одному событию.
Каждый источник АЭ генерирует сигналы с заданной частотой и длительностью, являющейся индивидуальной функцией источника, которая не зависит от акустического тракта и имеет одинаковое отображение на временной записи на каждом канале регистрации АЭ. Поэтому выявление групп разных каналов, принадлежащих одному событию, проводится сравнением временных функций проявления источника АЭ. Для этого АВФ предлагается трансформировать в последовательности появления групп кадров АВФ АЭ (периодограммы) с последующим сравнением бинарных масок групп в пределах времени ИФС+ДМП.
Бинаризация периодограмм кадров АВФ АЭ на длине TREC проводится на основе замены участков АВФ известного времени Тфр или Sфр номером группы, присвоенной на основании их подобности по критерию [KПД]. При этом при появлении АВФ заданной группы участок известного времени Тфр или Sфр заменяется на «1» и присваивается значение «0» при появлении любой другой группы, отличной от заданной. В качестве примера на фиг.3 представлена бинаризация записей АЭ b(t), g(t), h(t) с преобразователей АЭ b, g, h.
Подобие между двумя любыми бинарными рядами Xi(t) и Yi(t) из множества сочетаний количества каналов регистрации и количества групп, а также время задержки (τ0) между ними определяется положением максимумов функций кросс-корреляции 
По окончании выполнения этапа сравнения бинарных масок группы кадров АВФ АЭ различных каналов регистрации, различных антенных групп приводятся к одним номерам (одинаковым событиям) в соответствии с формой кривой спектральной плотности и максимумами функций 
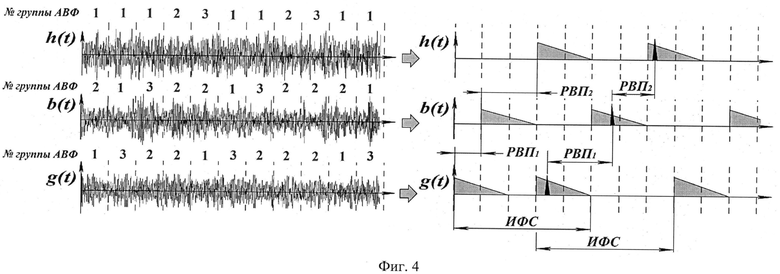
Определение координат шумоподобного источника АЭ может быть проведено любым из известных способов локации (зонный, линейный, триангуляционный, угловой, дисперсионный) после определения ключевых параметров методов локации (амплитуды сигналов и/или их РВП) на кадровой записи АВФ. Для этого кадровую запись АВФ предлагается приводить к импульсной форме [2] следующим образом. В последовательностях АВФ кадры соответствующей группы заменяются на импульсы длительностью, равной длине фрейма, и амплитудой, равной либо максимальной, либо средней амплитуде колебания в кадре АВФ АЭ, либо при τ0 (фиг.4).
Пусть на фиг.4 для датчика h группа 1 является фоновым шумом, а группы 2 и 3 - искомое событие, разбитое на два фрейма, что для датчика b и g соответствует группам 2 и 1, 3 соответственно. Тогда последовательности АВФ для определения РВП события после учета искажения и объединения групп 2-3 и 1-3 соответственно примут импульсный вид, представленный на фиг.4. В простейшем случае РВП может быть рассчитана, как разница начал отсчета фреймов (серые импульсы) или как разница времени между максимальными амплитудами на фреймах (черные пики), принадлежащих одному событию. Более точное и более сложное определение РВП реализуемо по временным сдвигам τ0 максимумов функции
Необходимо подчеркнуть, что предлагаемый способ не является алгоритмом определения координат, а является базовым звеном подготовки данных для применения существующих методов локации с целью определения координат шумоподобных источников АЭ.
Предлагаемый способ реализуем как при статическом, так и при динамическом, температурном и др. воздействии на ОК в зависимости от конкретной поставленной задачи испытания. Кроме этого предлагаемый способ может быть реализуем и при исследовательском направлении применения метода АЭ в качестве алгоритма распознавания типов/образов шумоподобных источников АЭ.
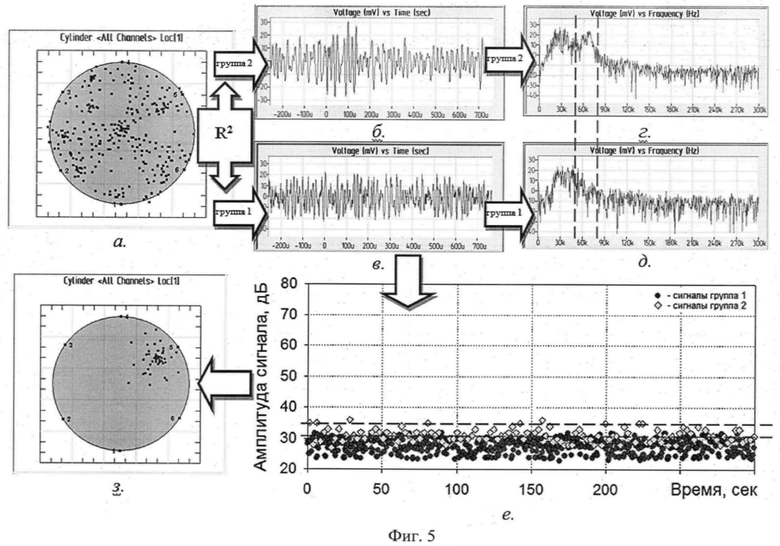
В качестве примера предлагаемый способ был опробован при поиске места утечки продукта в днище резервуара, работающего под атмосферным давлением, диаметром 2,5 м и высотой 5,0 м при гидравлическом испытании. Днище резервуара недоступно для внешнего визуального контроля, а внутренний осмотр и цветная дефектоскопия результатов не дали. Согласно нормативным документам при гидроиспытании в резервуаре разрешается давление до 0,1 МПа, с временем выдержки не более 5 минут. При таком малом давлении уровень «полезного» АЭ-сигнала от пропуска сопоставим с уровнем общего шума, и стандартный пороговый подход приводит к заполнению локационной карты ложными событиями (фиг.1 и 5а). Для поиска места пропуска потребовалось решить задачу по выделению сигналов от пропуска из фонового шума.
При реализации способа использовался метод триангуляции определения координат излучателей. Расстояние между ПАЭ в антенной группе (L) выбиралось с учетом рекомендаций [8, 9], а именно антенные решетки формировались исходя из следующего выражения:

где Р - периметр объекта контроля по контролируемому сечению, ZПАЭ - количество устанавливаемых ПАЭ в контролируемом сечении, LЗОН - радиус зоны уверенного приема для используемых ПАЭ, удовлетворяющий условию:

где Upeaki - амплитуда сигнала АЭ от имитатора при i-м измерении, находящегося на расстоянии Z, от ПАЭ, при i=1, 2, 3…; Unoise - средний уровень фона, при отсутствии действия искомого источника АЭ, ИФС=L (мм), ДМП=±L (мм). При контроле на нескольких типах волн, распространяющихся как по материалу ОПО, так и по хранимому продукту (испытательной среде), LЗОН (мм) и С (м/с) определяются для каждого типа волны.
Запись АВФ АЭ получали по кадрам, через «мертвое время» аппаратуры в диапазоне частот 20÷400 кГц. Длина фрейма выбиралась 1024 отсчета, частота дискретизации - 1 МГц.
Функции G(f) кадров АВФ АЭ получали по алгоритму быстрого Фурье-преобразования Кули-Тьюки. В качестве критерия степени схожести (KПД) их нормированных пар функций

где
где 





Значение R2 подбиралось таким, чтобы происходило разделение кадров АЭ на две группы (фиг.5б и 5в), что логично при поиске места утечки в резервуаре, при постоянном давлении. Одна связана с постоянным окружающим фоном, а вторая - с наложением на фон сигналов от аэрогидродинамических эффектов, возникающих при утечке продукта.
Сравнение усредненных спектров 2-х групп показало следующее (фиг.5г, 5д):
- для обеих групп максимальная мощность излучения происходит в узком частотном диапазоне в районе 40 кГц;
- основное отличие между сигналами двух групп заключается в появлении в спектре сигналов 2-й группы дополнительного локального максимума в области 60-80 кГц. При этом амплитуда сигналов 2-й группы по сравнению с 1-й выше, в среднем, всего на 2-4 дБ (фиг.5е);
- количество сигналов во 2-й группе на порядок меньше чем в 1-й. Исходя из вышеизложенного, сделан вывод о связи с пропуском именно сигналов 2-й группы. Действительно, после применения метода триангуляции для построения локационной карты сигналов 2 группы удалось установить место пропуска с точностью 100×100 мм (фиг.5з). Это заключение впоследствии полностью подтвердил повторный внутренний осмотр указанной области, а проведенное после ремонта выявленного дефекта гидравлическое испытание резервуара с выдержкой на плотность в течение 24 часов дало положительные результаты.
Источники информации
1. Catty J. Acoustic emission testing - defining a new standard of testing for pressure vessels. Part 1: Quantitative and comparative performance analysis of zonal location and triangulation methods - J. Acoustic Emission, 2009, №27, p.299-313.
2. Грешников В.А., Дробот Ю.В. Акустическая эмиссия. Применение для испытаний материалов и изделий - М.: Изд-во стандартов, 1976, 276 с.
3. Наконечная О.А. Методы и алгоритмы локации источников акустической эмиссии - Мiжвiдомчий науково-технiчний збiрник «Електро-мащинобудовання та електро-обладнання», Киiв: «Технiка», 2009, Выпуск 73, с.111-115.
4. Anastasopoulos A., Kourousis D., Bollas К. Acoustic emission leak detection of liquid filled buried pipeline - J. Acoustic Emission, 2009, №27, p.27-39.
5. Aljets D., Chong A., Wilcox S., Holford K. Acoustic emission source location in plate-like structures using a closely arranged triangular sensor array -J. Acoustic Emission, 2010, №28, p.85-98.
6. Ovchinnikov A.E. Localization of AE signals in pipes with one-sided access- 10th ECNDT 2010 Moscow - June.7-11, 2010, www. idspektr.ru.
7. Тарасов В.А., Кропачев Д.А. Корреляционная пассивная звуковая локация - Технология и конструирование в электронной аппаратуре, 2002, №2, с.29-34.
8. ПБ 03-593-03. Правила организации и проведения акустико-эмиссионного контроля сосудов, аппаратов, котлов и технологических трубопроводов - М.: Госгортехнадзор России, 2003.
9. СА 03-008-08. Резервуары вертикальные стальные сварные для нефти и нефтепродуктов. Техническое диагностирование и анализ безопасности (Методические указания) - М.: Ростехэкспертиза, НПС «РИСКОМ», НПК «Изотермик», 2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ АКУСТИЧЕСКОЙ ЭМИССИИ ПОВЫШЕННОЙ НАДЕЖНОСТИ | 2015 |
|
RU2601270C1 |
| Акустико-эмиссионной способ измерения износа узлов трения скольжения | 2023 |
|
RU2830175C1 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ КООРДИНАТ ПРЕОБРАЗОВАТЕЛЕЙ АКУСТИЧЕСКОЙ ЭМИССИИ | 2006 |
|
RU2330277C1 |
| Способ акустико-эмиссионной диагностики динамического промышленного оборудования | 2018 |
|
RU2684709C1 |
| Способ определения координат источников акустической эмиссии при планарной локации | 2024 |
|
RU2830422C1 |
| Способ беспороговой автоматической интеллектуальной регистрации сигналов акустической эмиссии устройством неразрушающего контроля | 2017 |
|
RU2660403C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ НАКОПЛЕНИЯ ПОВРЕЖДЕНИЙ В ДИАГНОСТИРУЕМОМ ОБЪЕКТЕ И УСТРОЙСТВО БИФУРКАЦИОННОЙ МОДЕЛИ | 2019 |
|
RU2704575C1 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ РАННЕГО ВЫЯВЛЕНИЯ ПОВРЕЖДЕНИЙ В ДЕФОРМИРУЕМЫХ АЛЮМИНИЕВЫХ СПЛАВАХ | 2015 |
|
RU2618760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ БЕТОНА МЕТОДОМ АКУСТИЧЕСКОЙ ЭМИССИИ | 2022 |
|
RU2807868C1 |
Использование: для выявления шумоподобных источников акустической эмиссии во время диагностирования, мониторинга, оценки состояния и ресурса объектов контроля с применением локационных методов акустической эмиссии. Сущность изобретения заключается в том, что для выделения сигналов акустической эмиссии, принадлежащих одному событию, совместно анализируют подобие кривых спектральной плотности сигналов со сравнением временных функций их проявления. Технический результат: повышение точности определения координат шумоподобных источников акустической эмиссии. 1 з.п. ф-лы, 5 ил.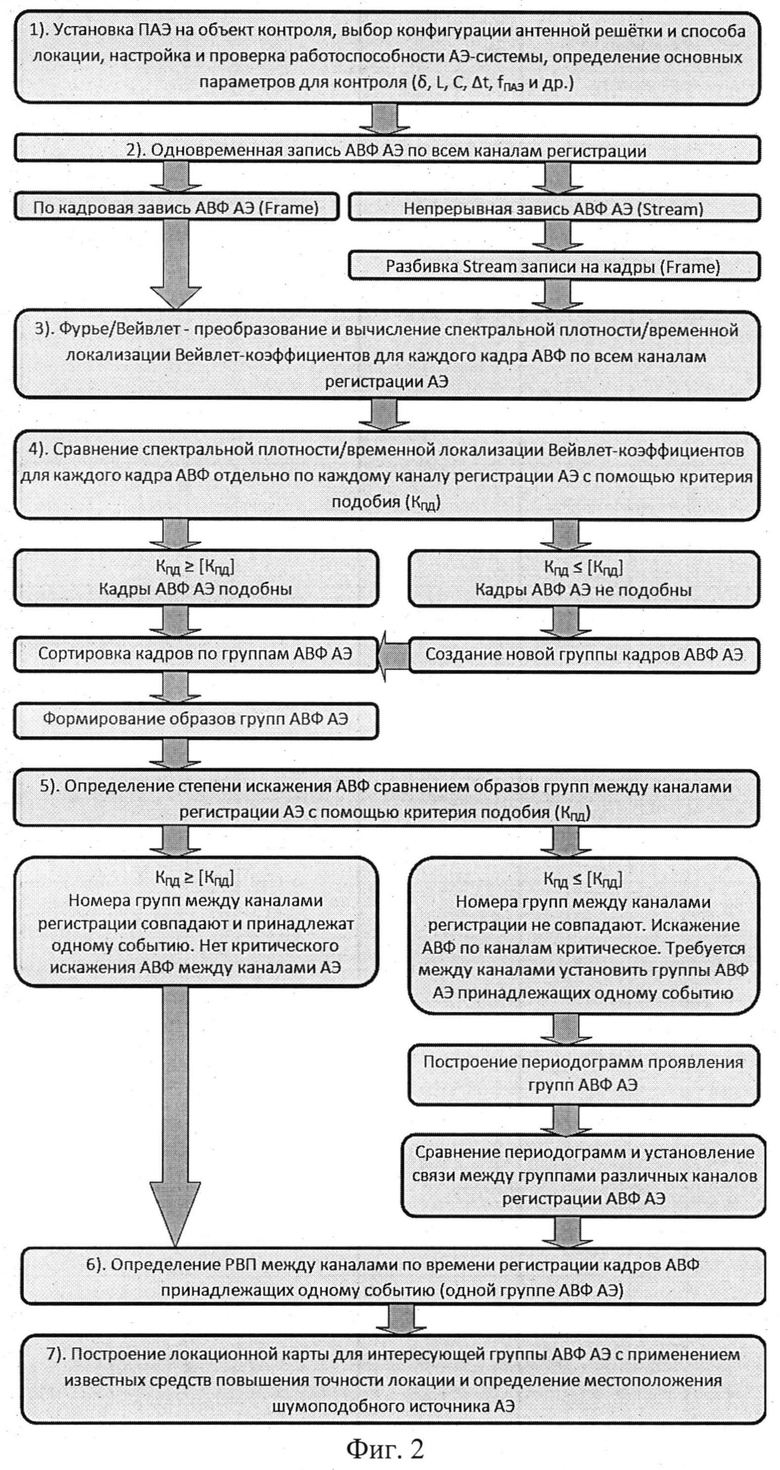
1. Способ повышения точности локации шумоподобных источников акустической эмиссии, отличающийся тем, что для выделения сигналов акустической эмиссии, принадлежащих одному событию, совместно анализируют подобие кривых спектральной плотности сигналов со сравнением временных функций их проявления.
2. Способ по п.1, отличающийся тем, что для анализа регистрирующуюся акустическую эмиссию разбивают на кадры, удовлетворяющие условию (1)
где fдискр - частота дискретизации АЦП (Гц); fПАЭ - максимальная рабочая частота ПАЭ (Гц); Nотс - количество отсчетов в кадре (фрейме); k - коэффициент разрешающей способности по частоте (Гц на отсчет); Тфр - длительность фрейма (c); Sфр - шаг сдвига фрейма при реализации плавающего окна; t - коэффициент разрешающей способности по РВП; ИФС - интервал формирования события (м); ДМП - допуск на максимальный пробег (м); TREC - время записи акустической эмиссии (с); V - время чувствительного изменения контролируемого процесса; g - статистический коэффициент; C - скорость распространения волны в материале (м/с).
| Стрелков Петр Борисович, Разработка методики акустико-эмиссионного контроля оборудования и трубопроводов атомных электростанций, Автореферат диссертации на соискание ученой степени кандидата технических наук, Москва, 2006, весь документ | |||
| Растегаев Игорь Анатольевич, Применение методики спектрального анализа акустических сигналов для исследования |

