Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА), например, при заходе ЛА на посадку по приборам.
Известные способы и устройства измерения угла крена ЛА основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Таким способам измерения и устройствам, их реализующих, присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений и за один час полета она составляет величину единицы градусов [2-3]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные способы измерения угла крена ЛА и устройства, их реализующие, основаны на другом физическом принципе, по сравнению с заявляемым, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Сущность заявляемого способа измерения угла крена ЛА заключается в следующем.
Из точки с известными координатами излучают горизонтально линейно
поляризованные электромагнитные волны, вектор напряженности электрического поля 
На борту ЛА приемная антенна принимает электромагнитные волны в круговом ортогональном синфазном поляризационном базисе, в котором осуществляется одновременное разделение принятых электромагнитных волн на две ортогонально поляризованные по кругу составляющие правого 

Очевидно, что для измерения угла крена γ ЛА необходимо установить связь между разностью фаз ΔφRL ортогонально поляризованных по кругу волн правого 

Для установления этой связи воспользуемся известным [5-8] формализмом векторов и матриц Джонса.
Поскольку прием электромагнитных волн на борту ЛА производится в собственном круговом поляризационном базисе, где происходит разделение принятых электромагнитных волн на две волны круговой поляризации с противоположным направлением вращения, представим для наглядности излучаемую горизонтально линейно поляризованную электромагнитную волну в линейном ортогональном поляризационном базисе в виде суммы таких волн. Тогда получим:

где 

ω - круговая частота,
t - время.
Анализируя (1), видим, что первая группа составляющих представляет собой электромагнитную волну, поляризованную по кругу с левым направлением вращения 




Тогда вектор Джонса принимаемой линейно горизонтально поляризованной электромагнитной волны (2), заданной своими проекциями в линейном поляризационном базисе суммой двух волн, поляризованных по кругу с противоположным направлением вращения вектора электрического поля, может быть определен на борту ЛА, имеющего положительный +γ или отрицательный -γ крен, при переходе в круговой синфазный ортогональный поляризационных базис на входе приемника в виде:

где 

±γ - соответствует положительному углу крена ЛА, когда его правое крыло или поперечная ось находится ниже горизонтальной плоскости,
-γ - соответствует отрицательному углу крена ЛА, когда его правое крыло или поперечная ось находится выше горизонтальной плоскости,


После преобразований получим аналитические выражения для ортогонально поляризованных по кругу составляющих правого 



Подставляя в (4) и (5) значения +γ, получим соответственно выражения для 



Используя известные соотношения [7], амплитуды AL и AR, а также фазы φL и φR ортогонально поляризованных по кругу составляющих 

а их разность фаз после преобразований имеет вид:

откуда следует, что

Из анализа (8) и (10) следует, что амплитуды AL и AR ортогонально поляризованных по кругу составляющих
Подставляя в (4) и (5) или в (6) и (7) значение -γ, получим выражения для


Соответственно амплитуды AL и AR, а также фазы φL и φR ортогонально поляризованных по кругу составляющих
а их разность фаз после преобразований имеет вид:

откуда следует, что

Из анализа (16) и (18) следует, что на выходе приемника амплитуды AL и AR ортогонально поляризованных по кругу составляющих

где «+» - соответствует положительному углу крена γ, когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
«-» - соответствует отрицательному углу крена ЛА, когда его правое крыло или поперечная ось находится выше горизонтальной плоскости,
ΔφRL=φR-φL - разность фаз между ортогонально поляризованными по кругу волнами
Таким образом, проводя сравнительный анализ полученных выражений (12) и (19), видим, что при появлении крена ЛА возникает одновременно фазовый сдвиг между ортогонально поляризованными по кругу составляющими

Использование заявляемой совокупности признаков для измерения угла крена ЛА в известных решениях автором не обнаружено.
На фиг.1 представлена структурная электрическая схема устройства, реализующего предложенный способ измерения угла крена ЛА.
Устройство содержит передатчик 1 и передающую антенну 2, расположенные в точке с известными координатами. На борту ЛА устройство содержит приемную антенну 3, секцию круглого волновода со встроенной четвертьволновой фазовой пластиной 4, линейный поляризационный разделитель 5, фазовый угловой дискриминатор 6 и индикатор 7.
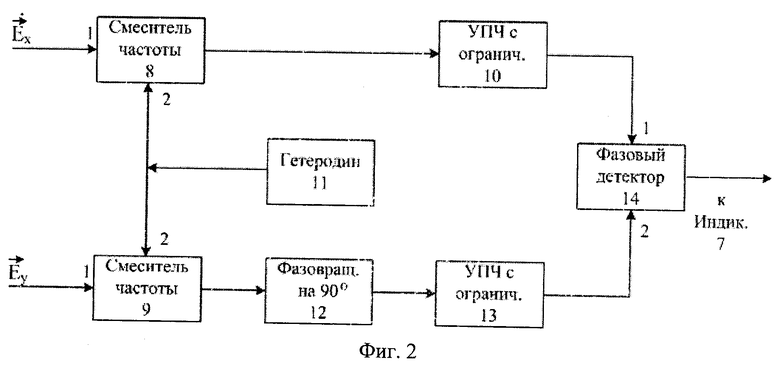
На фиг.2 представлена структурная электрическая схема фазового углового дискриминатора 6, включающего в себя первый и второй смесители частоты 8 и 9, первый усилитель промежуточной частоты (УПЧ) с ограничением по амплитуде 10, гетеродин 11, второй усилитель промежуточной частоты (УПЧ) с ограничением по амплитуде 13, фазовращатель на 90° 12, фазовый детектор 14.
Устройство работает следующим образом.
Передатчик 1 через передающую антенну 2 излучает в направлении ЛА горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля Е которых совпадает с горизонтальной плоскостью и задан своими проекциями в линейном поляризационном базисе суммой двух волн, ортогонально поляризованных по кругу в виде (2).
На борту ЛА, имеющего в общем случае положительный +γ либо отрицательный -γ угол крена, электромагнитные волны, вектор Джонса которых имеет вид (2), принимаются приемной антенной 3 и поступают на последовательно соединенные секцию круглого волновода со встроенной во внутрь четвертьволновой фазовой пластиной 4 и линейный поляризационный разделитель 5, выполненный в виде перехода с круглого волновода на два ортогонально расположенных по отношению друг к другу прямоугольных волноводов, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и совпадают также с вертикальной и поперечной осями ЛА соответственно. Причем четвертьволновая фазовая пластина ориентирована под углом θ=-45° к одной из стенок прямоугольного волновода линейного поляризационного разделителя 5. Сочетание секции круглого волновода со встроенной во внутрь четвертьволновой фазовой пластиной 4 и линейного поляризационного разделителя 5 позволяет, как известно [7], осуществить на борту ЛА прием электромагнитных волн в круговом поляризационном базисе и, таким образом, разделить поступающие на вход электромагнитные волны, вектор Джонса которых задан в виде (2), на две ортогонально поляризованные по кругу волны. В этом случае сигналы на выходах плеч линейного поляризационного разделителя 5 определяются с помощью преобразований вида:


где





Подставляя в (22) и (23) значения +γ и θ=-45°, и, проделав необходимые матричные преобразования, получим аналитические выражения для ортогонально линейно поляризованных сигналов 



Уместно пояснить суть полученных выражений (24) и (25). Для этого обратимся к соотношению (2), из которого следует, что вектор Джонса







и

С выхода секции круглого волновода со встроенной во внутрь четвертьволновой фазовой пластиной сигналы (26) и (27) поступают на соответствующие им входы прямоугольных волноводов линейного поляризационного разделителя 5. Таким образом, на выходе линейного поляризационного разделителя 5 формируются ортогонально линейно поляризованные сигналы, имеющие вид (24) и (25). Причем, как известно [7], амплитуды Ax и Ay, а также фазы φx и φy этих ортогонально линейно поляризованных составляющих




а их разность фаз

или, с учетом ввода в канал 

Из анализа (28) и (30) следует, что амплитуды Ax и Ay ортогонально линейно поляризованных составляющих
Подставляя в (22) и (23) или в (24) и (25) значения γ, получим выражения для ортогонально линейно поляризованных сигналов


Соответственно амплитуды Ax и Ay, а также фазы φх и φy ортогонально поляризованных сигналов


а их разность фаз:

или, с учетом постоянного фазового сдвига 90° в канале

Из анализа (36) и (38) следует, что амплитуды Ax и Ay ортогонально линейно поляризованных сигналов

где «+» - соответствует положительному углу крена γ, когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
«-» - соответствует отрицательному углу крена γ, когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
Δφyx=φy-φx - разность фаз между ортогонально линейно поляризованными сигналами
С выходов плеч линейного поляризационного разделителя 5 ортогонально линейно поляризованные сигналы 


или с учетом (42)

где U0=const.
С выхода фазового детектора 14 сигнал поступает на вход индикатора 7, шкала которого проградуирована, с учетом (44) в градусах угла крена γ ЛА.
В 3-см диапазоне волн заявляемое устройство измерения угла крена ЛА может быть выполнено следующим образом.
В качестве передатчика 1 может использоваться, например, стандартный генератор высокочастотных колебаний типа ГЧ-83.
В качестве передающей антенны 2 может быть использована рупорная антенна [9], которая имеет собственную линейную горизонтальную поляризацию.
Приемная антенна 3 может быть выполнена в виде круглого рупора [10].
Линейный поляризационный разделитель 5 выполнен в виде волновода круглого сечения с переходом на два ортогонально расположенных волноводов прямоугольного сечения [7].
Фазовый угловой дискриминатор может быть выполнен по известной схеме [11] фазо-фазовой моноимпульсной системы.
Индикатор 7 может быть выполнен в виде стрелочного прибора, шкала которого прокалибрована в градусах угла крена ЛА.
По сравнению с широко используемыми средствами измерения угла крена ЛА, основанными на применении гироскопических систем ориентации, заявляемые способ и устройство измерения угла крена ЛА позволяют избежать постоянного накапливания с течением времени ошибки измерения.
Источники информации
1. А.С.Александров, Г.Р.Арно и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. - 119 с.
2. Д.С.Пельпор, В.В.Ягодкин. Гироскопические системы. - М., Высшая школа, 1977. - 216 с.
3. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: Транспорт, 1980. - 357 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
5. Корнблит С. СВЧ-оптика. Пер. с англ./Под ред. О.П.Фролова. - М.: Связь, 1980. - 360 с.
6. Аззам Р., Башара П. Эллипсометрия и поляризованный свет. - М.: Мир, 1981. - 588 с.
7. Канарейкин Д.Б., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Сов. радио», 1966. - 440 с.
8. Богородский В.В., Канарейкин Д.Б., Козлов А.И. Поляризация рассеянного и собственного радиоизлучения земных покровов. - Л.: Гидрометеоиздат, 1981. - 280 с.
9. Драбкин А.Л. и др. Антенно-фидерные устройства. - М.: «Сов. радио», 1974. - 535 с.
10. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. - М.: «Энергия», 1966.
11. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: «Радио и связь», 1984. - 312 с.
Изобретение может использоваться в пилотажно-навигационных системах ориентации летательного аппарата при заходе на посадку по приборам. Способ измерения угла крена летательного аппарата заключается в том, что из точки с известными координатами излучают горизонтально линейно поляризованные электромагнитные волны, на борту летательного аппарата принимают электромагнитные волны в круговом поляризационном базисе, разделяют принятые электромагнитные волны на две ортогонально поляризованные по кругу составляющие правого и левого направления вращения и измеряют разность фаз между ними, по измеренной разности фаз рассчитывают угол крена летательного аппарата. Достигаемый технический результат - исключение постоянного накапливания с течением времени ошибки измерения угла крена летательного аппарата. 2 н.п. ф-лы, 2 ил.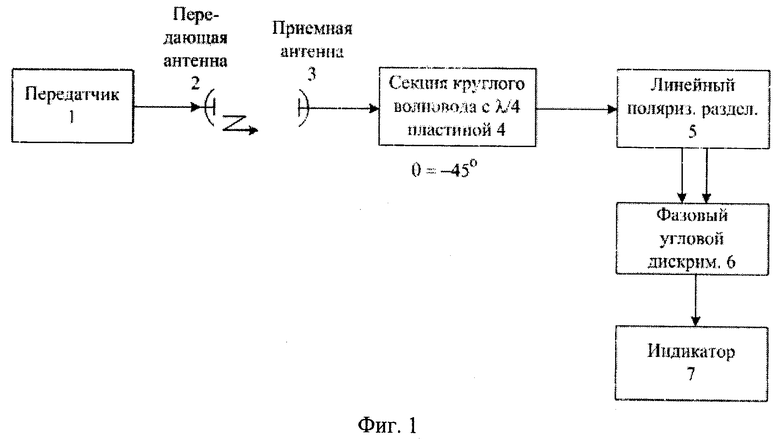
1. Способ измерения угла крена летательного аппарата при его движении на источник излучения электромагнитных волн, отличающийся тем, что из точки с известными координатами излучают горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля 


где ΔφRL=φR-φL - разность фаз между ортогонально поляризованными по кругу составляющими правого 

+γ - положительный угол крена (правое крыло, или поперечная ось ЛА, находится ниже горизонтальной плоскости),
-γ - отрицательный угол крена (правое крыло, или поперечная ось ЛА, находится выше горизонтальной плоскости),
2. Устройство для измерения угла крена летательного аппарата, отличающееся тем, что в точке с известными координатами располагается передатчик, выход которого подключен к входу передающей антенны с горизонтальной собственной поляризацией, и расположенная на борту летательного аппарата приемная антенна, выход которой подключен к входу секции круглого волновода со встроенной во внутрь четвертьволновой фазовой пластиной, выход которой подключен к входу линейного поляризационного разделителя, два выхода которого подключены к соответствующим двум входам фазового углового дискриминатора, выход которого подключен к входу индикатора, шкала которого прокалибрована в градусах угла крена летательного аппарата, причем вектор напряженности электрического поля излучаемых горизонтально линейно поляризованных электромагнитных волн совпадает с горизонтальной плоскостью, четвертьволновая фазовая пластина ориентирована под углом -45° к широкой стенке прямоугольного волновода одного из плеч линейного поляризационного разделителя, а линейный поляризационный разделитель ориентирован так, что его собственные орты совпадают с вертикальной и поперечной осями летательного аппарата соответственно.
| АГАДЖАПОВ П.А | |||
| и др | |||
| Автоматизация самолетовождения и управления воздушным движением | |||
| Москва, Транспорт, 1980, 357 с | |||
| Способ измерения пеленга подвижного объекта и устройство для его осуществления | 1985 |
|
SU1251003A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| МНОГОПОЛЯРИЗАЦИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2139553C1 |
| RU 2191351 C1, 20.10.2002 | |||
| US 7672758 B2, 02.03.2010 | |||
| US 7894948 B2, 22.02.2011 | |||
| Станок для обработки паркетных заготовок | 1990 |
|
SU1794660A1 |

