Изобретение относится к радионавигации и может использоваться в навигационных системах для определения угловых координат подвижных объектов как в азимутальной, так и в угломестной плоскостях.
Известна радионавигационная система [1, 2], в которой пеленг подвижного объекта определяется на основе измерения разности фаз сигналов на выходе двух разнесенных в пространстве приемных антенн. Эта система содержит источник электромагнитных волн, расположенный в точке с известными координатами и расположенные на подвижном объекте две разнесенные в пространстве приемные антенны, каждая из которых последовательно соединена с соответствующим приемником, фазометр и счетно-решающее устройство, причем, выходы приемников подключены к соответствующим двум входам фазометра, а его выход подключен к входу счетно-решающего устройства. Фазометр измеряет разность фаз напряжений на выходе приемников, а счетно-решающее устройство по измеренной разности фаз определяет пеленг подвижного объекта.
Недостатком этой радионавигационной системы является низкая точность измерений пеленга подвижного объекта при наличии жестких ограничений на габариты приемных антенн.
Этот недостаток обусловлен тем, что точность измерений пеленга подвижного объекта определяется пространственным разносом приемных антенн. Чем больше расстояние между антеннами, тем выше точность измерений и, наоборот, при уменьшении пространственного разноса приемных антенн точность измерений пеленга подвижного объекта снижается.
Известна радионавигационная система для измерения пеленга подвижного объекта [3, 4]. Эта система содержит радиомаяк, расположенный в точке с известными координатами и приемо-индикатор, расположенный на подвижном объекте. Радиомаяк содержит передатчик с подключенными к нему, через синхронный переключатель, трех передающих антенн, расположенных в вершинах равностороннего треугольника. Разность фаз сигналов, приходящих от любой из пар антенн, определяется угловым положением подвижного объекта. Приемо-индикатор содержит приемную антенну, выход которой соединен с выходом приемника, а его выход через синхронный переключатель подключен к трем приемным каналам и фазометр, два входа которого с помощью переключателя подключены к выходам любой из пар приемных каналов. Работа системы основана на поочередном, во времени, излучении электромагнитных волн из двух точек с известными координатами, расположенных в плоскости измерений на расстоянии d друг от друга. Причем длины и амплитуды излучаемых электромагнитных волн равны и начальные фазы совпадают. На подвижном объекте последовательно во времени принимаются электромагнитные волны от любой из пар передающих антенн и измеряется их разность фаз, после чего рассчитывается пеленг подвижного объекта.
Недостатком этой радионавигационной системы является низкое быстродействие измерений пеленга подвижного объекта, обусловленное временным разделением передаваемых и, соответственно, принимаемых сигналов.
Известна радионавигационная система для измерения пеленга подвижного объекта (А.с. №1355955, М кл.4, G01S 3/02, приоритет от 9.12.1985 [5]), в которой пеленг подвижного объекта определяется на основе измерения разности фаз Δφ между ортогонально линейно поляризованными электромагнитными волнами, одновременно излучаемыми с равными амплитудами, фазами и длинами волн из двух точек с известными координатами расположенных в плоскости измерений на расстоянии d друг от друга. При этом пеленг α подвижного объекта определяется относительно равносигнального направления, совпадающего с нормалью к середине линии, соединяющей точки излучений ортогонально линейно поляризованных электромагнитных волн по формуле:

где λ - длина волны.
Навигационная система содержит передатчик с подключенными к нему двумя передающими антеннами с ортогональными линейными собственными поляризациями. На подвижном объекте навигационная система содержит приемную всеполяризованную антенну, секцию круглого волновода с встроенной четвертьволновой фазовой пластиной, линейный поляризационный разделитель, амплитудный дискриминатор и вычислитель. Причем четвертьволновая фазовая пластина ориентирована под углом 45° к одной из стенок прямоугольного волновода линейного поляризационного разделителя.
Навигационная система работает следующим образом.
Передатчик через подключенные к нему двумя передающими антеннами с ортогональными линейными собственными поляризациями излучают линейно ортогонально поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн.
На подвижном объекте суммарная электромагнитная волна полностью принимается всеполяризованной приемной антенной и поступает на последовательно соединенные секцию круглого волновода со встроенной четвертьволновой фазовой пластиной и линейный поляризационный разделитель. Сочетание секции круглого волновода с встроенной четвертьволновой фазовой пластиной и линейного поляризационного разделителя позволяет осуществить на подвижном объекте прием суммарной электромагнитной волны в круговом поляризационном базисе и, таким образом, разделить поступающую на вход суммарную электромагнитную волну на две ортогонально поляризованные по кругу волны. С выходов плеч линейного поляризационного разделителя сигналы поступают на вход амплитудного дискриминатора, где формируется напряжение, равное отношению амплитуд E1/E2 сигналов в виде [5]

После чего, выходной сигнал (2) амплитудного дискриминатора поступает на вычислитель, где с учетом (1) и (2), рассчитывается пеленг подвижного объекта по формуле [5]

где n=0, 1, 2, ….
Этой радионавигационной системе присущ ряд недостатков. Во-первых, обладает низкой точностью измерений пеленга подвижного объекта на равносигнальном направлении и направлениях, близких к нему, обусловленной низкой крутизной пеленгационной характеристики (2) в указанных направлениях при фиксированном отношении d/λ. Во-вторых, не возможно определить сторону отклонения подвижного объекта от равносигнального направления. Последнее обусловлено тем, что отношение амплитуд сигналов E1/E2 на выходе амплитудного дискриминатора величина всегда положительная, поэтому пеленгационная характеристика (2) имеет симметричный вид относительно равносигнального направления.
Наиболее близким по совокупности признаков к заявляемой радионавигационной системе является устройство для измерения пеленга подвижного объекта (патент СССР №1251003 М. кл.4 G01S, 3/02, приоритет от 29.01.85) [6]. Это устройство содержит передатчик с подключенными к нему двумя передающими антеннами с ортогональными собственными поляризациями и расположенными в точках с известными координатами в плоскости измерений на расстоянии d друг от друга и расположенных на подвижном объекте приемную всеполяризованную антенну, линейный поляризационный разделитель, амплитудно-фазовый дискриминатор и вычислитель, при этом выход приемной всеполяризованной антенны подключен к входу линейного поляризационного разделителя, а два его выхода подключены к двум входам амплитудно-фазового дискриминатора, а его выход подключен к входу вычислителя, причем линейный поляризационный разделитель ориентирован так, что орты его собственной системы координат совпадают с осями плеч прямоугольных волноводов и ориентированы под углом θ=45° к плоскости измерений.
Работа устройства заключается в том, что передатчик через подключенные к нему двумя передающими антеннами одновременно из двух точек излучают ортогонально эллиптически поляризованные электромагнитные волны с равными амплитудами, фазами и длинами волн.
На подвижном объекте суммарная электромагнитная волна, вектор Джонса которой в декартовом поляризационном базисе имеет вид [6]

где ε - угол эллиптичности излучаемых ортогонально поляризованных электромагнитных волн,
полностью принимается всеполяризованной приемной антенной, после чего сигнал поступает на вход линейного поляризационного разделителя, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и ориентированы под углом θ=45° к плоскости измерений. Линейный поляризационный разделитель разделяет поступающую на его вход суммарную электромагнитную волну, на две линейные ортогональные по поляризации электромагнитные волны. В этом случае сигналы на выходах плеч линейного поляризационного разделителя, опуская временную зависимость сигналов, определяются с помощью преобразований [6]


где 


После преобразований получим аналитические выражения для сигналов 



С выходов плеч линейного поляризационного разделителя сигналы, описываемые аналитическими выражениями (5) и (6), поступают на входы амплитудно-фазового дискриминатора. Причем сигнал 





Из анализа (7) и (8) видно, что амплитуды A1 и A2 сигналов 





а их разность фаз имеет вид

Таким образом, при θ=45° амплитуды A1 и A2 зависят только от измеряемого параметра разности фаз Δφ между принимаемыми на подвижном объекте ортогонально эллиптически поляризованными электромагнитными волнами от первой и второй передающих антенн и не зависят от угла эллиптичности ε этих волн. В то же время разность фаз Δψ между сигналами
Для обеспечения нормальной работы амплитудно-фазового дискриминатора необходимо, как отмечается в [6], чтобы разность фаз между сигналами, поступающими на его вход, была равна 90°, а амплитуды A1 и А2 сигналов
В амплитудно-фазовом дискриминаторе происходит преобразование по частоте и усиление с учетом работы автоматической регулировки усиления, осуществляющей на промежуточной частоте нормировку сигналов

где k - коэффициент пропорциональности, зависящий от идентичности амплитудно- и фазо-частотных характеристик приемных каналов.
Полагая k=1 из (14) следует, что

где n=0, 1, 2, ….
С выхода амплитудно-фазового дискриминатора сигнал поступает на вычислитель, где с учетом (1) и (15), производится операция расчета пеленга а подвижного объекта по формуле

Зависимость измеряемого отношения A1/A2 (14) от угловой координаты α подвижного объекта, по сути, является пеленгационной характеристикой угломерного устройства. Пользуясь соотношением (14) с учетом (1), полагая k=1, можно показать, что крутизна пеленгационной характеристики в точке α=0 определяется соотношением

Таким образом, крутизна пеленгационной характеристики а, следовательно, и точность пеленгования растут с увеличением отношения 
Недостатком этой радионавигационной системы является низкая точность измерений пеленга α подвижного объекта, находящегося на равносигнальном направлении и направлениях, близких к равносигнальному. Этот недостаток обусловлен низкой крутизной пеленгационной характеристики в указанных направлениях, при фиксированном отношении d/λ.
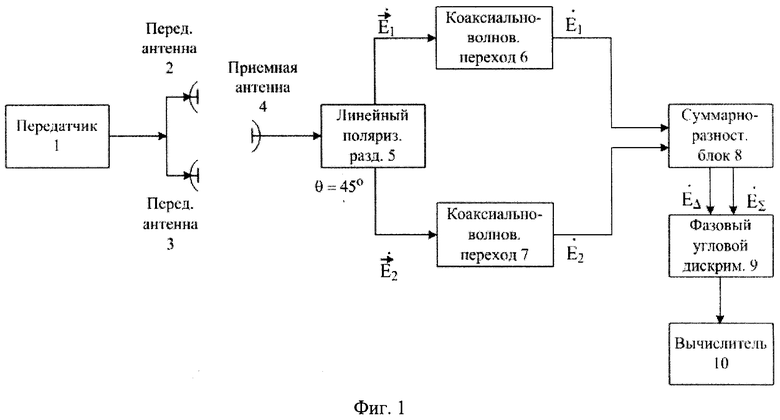
На фиг.1 представлена структурная электрическая схема радионавигационной системы для измерения пеленга подвижного объекта.
Радионавигационная система содержит передатчик 1, передающие антенны 2 и 3, расположенные в точках с известными координатами и разнесенные в плоскости измерений на расстоянии d друг от друга, на борту подвижного объекта радионавигационная система содержит приемную всеполяризованную антенну 4, линейный поляризационный разделитель 5, коаксильно-волноводные переходы 6 и 7, суммарно-разностный блок 8, фазовый угловой дискриминатор 9 и вычислитель 10.
На фиг.2 представлена структурная электрическая схема фазового углового дискриминатора 9, включающего в себя первый смеситель частоты 11, второй смеситель частоты 12, фазовращатель на π/2 13, гетеродин 14, первый усилитель промежуточной частоты (УПЧ) с ограничением по амплитуде 15, второй УПЧ с ограничением по амплитуде 16, фазовый детектор 17.
Радионавигационная система работает следующим образом.
Передатчик 1, через подключенные к нему двумя передающими антеннами 2 и 3 излучает электромагнитные волны соответственно с горизонтальной и вертикальной ориентациями плоскости поляризации с равными амплитудами, фазами и длинами волн.
На подвижном объекте суммарная электромагнитная волна, вектор Джонса которой в направлении α в декартовом поляризационном базисе, с учетом (4), при условии ε=0°, имеет вид:

где 
полностью принимается всеполяризованной антенной 4 и поступает на вход линейного поляризационного разделителя 5, орты собственной системы координат которого совпадают с осями плеч ортогонально расположенных по отношению друг к другу прямоугольных волноводов и ориентированы, в общем случае, под углом θ с плоскостью измерений.
Тогда ортогонально линейно поляризованные сигналы на выходах плеч линейного поляризационного разделителя 5, опуская временную зависимость сигналов, определяются с помощью преобразований вида:


где 


После преобразований получим аналитические выражения для сигналов 



С выходов плеч линейного поляризационного разделителя 5, ориентированного под углом θ=45° к плоскости измерений, сигналы


Соответственно амплитуды A1 и А2, а также фазы ψ1 и ψ2 сигналов 





а их разность фаз, после преобразований имеет вид:

Из анализа (25) и (27) следует, что при θ=45° амплитуды сигналов
В то же время, из анализа (29) видно, что разность фаз Δφ между сигналами
На выходах суммарно-разностного блока 8 формируются нормированные, с точностью до постоянного коэффициента 



Подставляя (23) и (24) в (30) и (31) и вводя, для наглядности представлений, временную зависимость сигналов, получим аналитические выражения для суммарного


Соответственно амплитуды AΣ и AΔ суммарного

и их разность фаз

где n=0, 1, 2, …,
или, после преобразований, с учетом n=0 получим

Из анализа (34) и (36) следует, что при ориентации линейного поляризационного разделителя 5 под углом θ=45° к плоскости измерений, амплитуды АΣ и АΔ суммарного

С выходов суммарно-разностного блока 8 суммарный

или с учетом (36)

где U0=const.
Производя нормировку (38) 

При малых значениях α, полагая U0=1, зависимость (39) имеет приближенно линейный характер:

Таким образом, по сигналу с выхода фазового детектора 17 можно определить величину и знак угла отклонения α от перпендикуляра, восстановленного к середине базы d, образованной передающими антеннами 2 и 3.
Найдя производную нормированного выходного сигнала фазового детектора 17 

Из (41) следует, что крутизна пеленгационной характеристики, а, следовательно и точность пеленгования растут с увеличением отношения 
С выхода фазового детектора 17 сигнал поступает в вычислитель 10, где по измеренной разности фаз ψΔ-ψΣ между разностным


где n=0, 1, 2, ….
Проведем сравнительный анализ точности измерений пеленга α подвижного объекта между устройством прототипом и заявляемой радионавигационной системой.
Из сравнительного анализа (17) и (41) следует, что когда подвижный объект находится на равносигнальном направлении, или на направлениях близких к равносигнальному, крутизна пеленгационной характеристики в заявляемой радионавигационной системе, при одном и том же отношении d/λ, в два раза выше, чем у устройства прототипа. А поскольку известно [1, 7], что при одном и том же отношении сигнал/шум на входе приемных каналов ошибка пеленгования δα связана с крутизной пеленгационной характеристики µ соотношением [7]:

то увеличение ее крутизны в два раза снижает ошибку пеленгования δα соответственно в два раза и тем самым обеспечивается более высокая точность измерений пеленга α.
Повышение точности измерений пеленга α подвижного объекта на указанных направлениях достигается за счет применения суммарно-разностной обработки сигналов на выходе линейного поляризационного разделителя, ориентированного под углом 45° к плоскости измерений.
Проводя сравнительный анализ выражений (25) и (29) с соответствующими выражениями (34) и (36) видим, что суммарно-разностная обработка сигналов, позволяет преобразовать угловую информацию о подвижном объекте, которая в устройстве прототипе содержится в амплитудных соотношениях (25) и (27) сигналов на выходе линейного поляризационного разделителя, в фазовые соотношения сигналов (36) на выходе суммарно-разностного блока в заявляемой радионавигационной системе. При этом пеленгационная характеристика (14) преобразовывается в пеленгационную характеристику (37). Причем эти преобразования осуществляются на высокой частоте до входов приемных каналов с использованием пассивных элементов в виде коаксиальных линий из-за их простоты и стабильности характеристик. Кроме того, использование суммарно-разностной обработки выходных сигналов линейного поляризационного разделителя на высокой частоте позволяет, так же как и в фазовых суммарно-разностных моноимпульсных системах [1, 7] предъявлять менее жесткие требования к идентичности амплитудно-фазовых характеристик приемных каналов, по сравнению с прямым измерением разности фаз Δφ. При этом необходимо так же отметить, что суммарно-разностная обработка осуществляется на выходе линейного поляризационного разделителя, ориентированного, так же как в прототипе, под углом 45° к плоскости измерений. Это обстоятельство позволяет обеспечить комплексные независимые измерения пеленга α за счет одновременного использования как амплитудных отношений (25) и (27) сигналов на выходе линейного поляризационного разделителя, так и использования фазовых соотношений (36) сигналов на выходе суммарно-разностного блока, что, безусловно, повысит точность и достоверность получаемой навигационной информации.
В 3-см диапазоне волн заявляемая радионавигационная система может быть реализована следующим образом.
В качестве передатчика 1 может быть использован, например, стандартный генератор высокочастотных колебаний типа ГЧ-83, к выходу которого подключен делитель мощности, выполненный в виде двойного волноводного Т-образного разветвителя [8]. Причем первый выход разветвителя подключен к передающей антенне 2, а его второй выход подключен через отрезок скрученного на 90° прямоугольного волновода к передающей антенне 3.
В качестве передающих антенн 2 и 3 может быть использована рупорная антенна [9].
Приемная всеполяризованная антенна 4 может быть выполнена в виде круглого рупора [8].
Линейный поляризационный разделитель 5 выполнен в виде волновода круглого сечения с переходом на два ортогонально расположенных волноводов прямоугольного сечения [10].
Суммарно-разностный блок 8 выполнен на коаксиальных линиях [1].
Фазовый угловой дискриминатор 9 может быть выполнен по известной [7] схеме фазо-фазовой моноимпульсной системе.
Вычислитель 10 может быть выполнен на базе бортового компьютера подвижного объекта.
Заявляемая радионавигационная система позволяет повысить точность измерений пеленга а подвижного объекта в два раза в случаях, когда подвижный объект находится на равносигнальном направлении и на направлениях близких к равносигнальному, за счет большей крутизны пеленгационной характеристики, сохраняя при этом габариты приемной антенны неизменными. Последнее позволяет повысить эффективность практического применения радионавигационных средств на подвижных объектах, где масса и габариты приемной антенны приобретают первостепенное значение.
Источники информации, использованные при составлении описания изобретения:
1. Ширман Я.Д. Теоретические основы радиолокации. - М.: «Транспорт», 1973.
2. Ярлыков М.С. Статистическая теория радионавигации. - М.: «Радио и связь», 1985. - 343 с.
3. Астафьев Г.П., Шебшаевич B.C., Юрков Ю.А. Радиотехнические средства навигации летательных аппаратов. - М.: «Советское радио», 1962. - 963 с.
4. Казаринов Ю.М. и др. Радиотехнические системы. - М.: «Советское радио», 1968. - 495 с.
5. Бадулин Н.Н., Гулько В.Л. Навигационная система для определения пеленга. - А.С. №1355955, М. кл.4, G01S 3/02, приоритет от 9.12.1985.
6. Бадулин Н.Н., Гулько В.Л. Способ измерения пеленга подвижного объекта и устройство для его осуществления. - Патент СССР №1251003, М. кл.4, G01S 3/02, приоритет от 29.01.1985.
7. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: «Радио и связь», 1984. - 312 с.
8. Жук М.С., Молочков Ю.Б. Проектирование линзовых сканирующих широкодиапазонных антенн и фидерных устройств. - М.: «Энергия», 1973. - 401 с.
9. Драбкин А.Л. и др. Антенно-фидерные устройства. - М.: «Советское радио», 1974.
10. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.

Изобретение относится к радионавигации и может использоваться в радионавигационных системах для измерения угловых координат подвижных объектов как в азимутальной, так и в угломестной плоскостях относительно задаваемого наземным радиомаяком направления. Сущность изобретения заключается в том, что радиомаяк одновременно из двух пространственно разнесенных в плоскости измерений точек с известными координатами излучает ортогонально линейно поляризованные электромагнитные волны. На подвижном объекте принимаются электромагнитные волны в линейном поляризационном базисе, составляющем угол 45° с плоскостью измерений. По принятым сигналам на выходе линейного поляризационного разделителя формируются суммарный и разностные сигналы и измеряется разность фаз между ними, после чего рассчитывается угловая координата подвижного объекта. Достигаемый технический результат - предлагаемая угломерная система обеспечивает более высокое быстродействие и точность измерений при наличии жестких ограничений на габариты приемной антенны подвижного объекта, где масса и габариты антенны приобретают первостепенное значение. 2 ил.
Радионавигационная система для измерения пеленга подвижного объекта, содержащая передатчик, выход которого соединен с входами двух разнесенных передающих антенн с ортогональными собственными поляризациями, расположенных в точках с известными координатами в плоскости измерений на расстоянии d друг от друга, и расположенные на подвижном объекте приемную всеполяризованную антенну, выход которой соединен с входом линейного поляризационного разделителя, выполненного в виде перехода с круглого волновода на два ортогонально расположенных по отношению друг к другу прямоугольных волновода, орты собственной системы координат которого совпадают с осями плеч прямоугольных волноводов и ориентированы под углом 45° к плоскости измерений, и вычислитель, отличающаяся тем, что введены первый и второй коаксиально-волноводные переходы, суммарно-разностный блок, выполненный на коаксиальных линиях, и фазовый угловой дискриминатор, при этом входы первого и второго коаксиально-волноводных переходов со стороны прямоугольных волноводов подключены к выходам линейного поляризационного разделителя, а их выходы подключены к входам суммарно-разностного блока, а два его выхода подключены к соответствующим двум входам фазового углового дискриминатора, а его выход подключен к входу вычислителя, причем передающие антенны имеют соответственно горизонтальную и вертикальную линейные собственные поляризации.
| Способ измерения пеленга подвижного объекта и устройство для его осуществления | 1985 |
|
SU1251003A1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |
| RU 22264937 C1, 27.11.2005 | |||
| US 20110298663 A1, 08.12.2011 | |||
| WO 2003023436 A2, 20.03.2003 | |||
| US 20110133987 A1, 09.06.2011 | |||
| СПОСОБ РЕМОНТА СКВАЖИНЫ | 2008 |
|
RU2354804C1 |

