Изобретение относится к области радиолокационных измерений и предназначено для распознавания (идентификации) воздушных целей различной формы и размеров.
Известен способ распознавания целей, основанный на анализе амплитуды и фазы вертикально и горизонтально поляризованных отраженных сигналов [1]. Способ заключается в излучении зондирующих импульсных сигналов на J различных частотах и 2-х ортогональных (например, горизонтальной и вертикальной) поляризациях. По значениям принятых сигналов формируется поляризационная матрица рассеяния, в которой параметр, характеризующий значение эффективной площади рассеяния (ЭПР), заменен параметром амплитуды отраженного сигнала "а". Сигнал, отраженный от цели, для каждого i-го угла визирования с j-й частотой облучения представляется в виде
где индекс "вв" означает, что сигнал был излучен и принят на вертикальной поляризации; индекс "вг" означает, что сигнал был излучен на вертикальной, а принят на горизонтальной поляризации; индекс "гг" означает, что сигнал был излучен и принят на горизонтальной поляризации; индекс "ij" означает, что сигнал соответствует i-му углу визирования (ракурсу) и j-й частоте зондирования; aij - амплитуда принятого сигнала на i-м ракурсе и j-й частоте; Ψij - фаза принятого сигнала на i-м ракурсе и j-й частоте зондирования.
Затем вычисляют расстояние d
и сравнивают полученный результат с заранее вычисленными порогами, определяющими тип распознаваемой цели. Необходимость сигналов с двумя видами линейной поляризации связана с тем, что для лучшего описания формы летательного аппарата (ЛА) в горизонтальной плоскости (фюзеляж, крылья) целесообразно принимать отраженный сигнал с горизонтальной поляризацией, а для получения информации о высоте планера ЛА - отраженный сигнал с вертикальной линейной поляризацией.
Недостатком данного способа является то, что он громоздок в расчетах и требует применения сигналов на J частотах зондирования для создания 6J-мерного векторного пространства, что существенно усложняет аппаратурную реализацию метода (размерность вектора равна 6J, так как J - число частот зондирования, а для каждой частоты вектор параметров рассеяния имеет размерность 6). К тому же, способ использует только две простейшие линейные поляризации, что снижает его эффективность. Например, если цель на данном ракурсе зондирования имеет симметричную форму и бортовую антенну круговой поляризации, то отраженные сигналы на 2-х ортогональных линейных поляризациях будут равными. Способ требует больших предварительных расчетов во всевозможных ситуациях, которые могут быть выполнены только при заказных полетах целей разных классов (типов) в различных комбинациях. Понятно, что такая задача практически невыполнима в отношении ЛА зарубежного производства.
Известен также способ распознавания целей, использующий одночастотный зондирующий сигнал с линейной поляризацией [2]. Способ заключается в том, что указанный сигнал излучается в направлении распознаваемой цели и имеет угол наклона плоскости поляризации 45o по отношению к горизонту. Затем производится прием отраженной электромагнитной волны (ЗМВ) на коллинеарной и ортогональной поляризациях, а далее - сравнение принятых сигналов по амплитуде. В патенте США N 4106014, описанном в источнике [2], показано, что цели различной конфигурации (например, автомобили военного назначения с коробковидными кузовами и гражданские автомашины гладкой формы) имеют различную амплитуду отражений на поляризации зондирующего сигнала и ортогональной ей линейной поляризации (с углом наклона 135o или минус 45o). Причем эксперименты подтверждают, что отражения на ортогональной поляризации тем больше превышают отражения на основной поляризации с углом наклона 45o, чем больше распознаваемая цель по своему виду приближается к коробковидной. В [2] представлена также функциональная схема устройства, реализующего описанный способ. Схема содержит приемопередающую антенну, приемную антенну, передатчик, триггер, линию задержки, 1-й и 2-й приемники, две схемы стробирования по дальности, сумматор и измерительный прибор.
Данный способ также имеет существенные недостатки. Во-первых, самолеты и вертолеты всегда имеют обтекаемую форму, ввиду чего отраженные ими сигналы на ортогональных поляризациях могут иметь на различных ракурсах непредсказуемую амплитуду. Во-вторых, способ сам по себе ориентирован на распознавание автотранспортных средств, а не воздушных целей, что, видимо, и определило такой угол наклона плоскости поляризации. В-третьих, признак распознавания не позволяет идентифицировать множество целей различной конфигурации с высокой вероятностью, а способствует только делению всех целей на обтекаемые и коробчатые, что сужает область его применения.
Наконец, известен способ распознавания целей [3], предложенный в патенте США N 4035797, который также использует сигналы, принятые на различных поляризациях. Сущность способа состоит в том, что поочередно излучаются сигналы с ортогональными поляризациями: вертикальной и горизонтальной. Для того, чтобы обеспечить развязку этих сигналов, они излучаются на разных несущих частотах f1 и f2. Прием отраженных целью сигналов осуществляется на 4-х поляризациях: коллинеарной вертикальной, перекрестной горизонтальной, перекрестной вертикальной и коллинеарной горизонтальной. Для каждой из 4-х поляризаций может быть предусмотрен свой канал обработки принятых сигналов. Все принятые сигналы проходят смесители, куда в качестве опорного подается часть сигнала, вырабатываемого генератором передатчика. Таким образом, на выходе смесителей формируются сигналы с доплеровской частотой, соответствующей принятому сигналу. Эти сигналы усиливаются, демодулируются и поступают на входы трех делителей для формирования составляющих признака распознавания. Первый делитель вычисляет отношение величины принятого коллинеарного вертикально поляризованного сигнала к величине принятого перекрестно поляризованного сигнала. Второй делитель вычисляет частное от деления величины принятого коллинеарного вертикально поляризованного сигнала к величине принятого колинеарного горизонтально поляризованного сигнала. Третий делитель рассчитывает отношение величины принятого перекрестно поляризованного сигнала к величине принятого коллинеарного горизонтально поляризованного сигнала. Выходные сигналы трех делителей суммируются и полученная сумма подвергается обработке в устройстве вычисления производной (УВП) от функции, представляющей собой изменение суммы сигналов трех делителей с течением времени. Если на выходе УВП при изменении дальности до цели сигнал равен нулю, принимается решение, что цель простая (одноточечная). Если на выходе УВП при изменении дальности до цели сигнал возрастает до определенных пределов, то принимается решение, что цель сложная многоточечная. Для формирования сигнала, характеризующего сложность конфигурации цели и обеспечивающего тем самым возможность распознавания классов целей, выходной сигнал УВП делится на величину выходного сигнала преобразователя "частота-напряжение". Сигнал этого преобразователя характеризует диапазон скорости изменения дальности до цели. Вышеуказанная операция деления осуществляется в четвертом делителе, выходное напряжение которого характеризует сложность цели на основе частного анализа коллинеарного горизонтально поляризованного сигнала. Таким образом, сравнивая сформированный признак распознавания (равный выходному напряжению четвертого делителя) с набором эталонных пороговых сигналов, определяется класс распознаваемой цели.
Недостатком данного способа является низкая вероятность правильного распознавания классов целей. Поскольку признак распознавания является сложной функцией отношений сигналов с различными поляризациями, то по сумме сигналов трех делителей невозможно судить о вкладе сигнала конкретного вида поляризации в итоговое значение признака распознавания. К тому же, как указано в [3], способ учитывает изменения сигналов, связанные только с изменением дальности до цели. При этом очевидно, что вариации сигналов могут быть связаны также и с изменением ракурса цели, как детерминированного за счет поступательного движения, так и случайного за счет рысканий, тангажей и кренов, то есть траекторных нестабильностей (ТН) полета. В способе не оговорено стробирование цели по дальности, что позволяет проникать в канал обработки сигналам, отраженным от местных предметов, метеообразований и других целей. Указанный факт может отрицательно сказаться на используемом алгоритме распознавания целей.
Изобретение способствует увеличению вероятности правильного распознавания целей с различной геометрией и структурой за счет использования излучения сигналов с различными видами поляризации, а также накопления и усреднения отраженных от целей сигналов. Задачей изобретения является повышение вероятности распознавания целей различных типов на основе использования многополяризационного зондирования.
Для достижения цели изобретения предлагается облучать ЛА, выбранный для распознавания, последовательностями импульсных сигналов, в которых каждый отдельно взятый импульс имеет вполне определенную, но отличную от других поляризацию. Как известно, поляризация определяется тремя основными параметрами: коэффициентом эллиптичности; углом наклона γ большой оси эллипса поляризации к горизонту, а также направлением вращения плоскости поляризации [4, с. 26; 5, с. 162-164]. На основании этих параметров можно описать любую, самую сложную поляризацию ЭМВ. При этом известны три основные вида поляризации: линейная, эллиптическая и круговая. Чем большее количество видов поляризации используется при локации цели, тем более детальную характеристику цели можно получить.
В разрабатываемом способе распознавания, как вариант, предлагается использовать десять видов поляризации:
1) линейная горизонтальная (угол наклона γ = 0o);
2) линейная вертикальная (угол наклона γ = 90o);
3) линейная с углом наклона γ = 45o;
4) линейная с углом наклона γ = 135o;
5) круговая левополяризованная (плоскость поляризации вращается против часовой стрелки);
6) круговая правополяризованная;
7) эллиптическая левополяризованная с углом наклона γ = 45o;
8) эллиптическая левополяризованная с углом наклона γ = 135o;
9) эллиптическая правополяризованная с углом наклона γ = 45o;
10) эллиптическая правополяризованная с углом наклона γ = 135o.
Использование такого многообразия видов поляризации позволяет скрупулезно описать отражательные свойства цели. В [6, с. 74-78] показано, что ЭПР реальных целей сложным образом зависит от вида поляризации зондирующих колебаний. Простейший пример такой зависимости приведен в [4, с. 32; 6, с. 37] при рассмотрении зависимости ЭПР пассивного линейного вибратора δ от направления прихода волны и вида ее поляризации. ЭПР реальных целей не является исключением. Их диаграммы обратного рассеяния (ДОР) могут изменяться при изменении вида поляризации, особенно когда размеры элементов цели соизмеримы с длиной волны. Этот факт подтвержден экспериментально в [6, с. 75, рис. 2.38; 7, с. 150, рис. 7.14]. В метровом диапазоне длин волн ДОР самолета отличается не только на разных ракурсах, но и на разных видах поляризации зондирующего сигнала. Одной из причин такого отличия является деполяризация падающей ЭМВ. Степень деполяризации определяется электрическими свойствами и формой цели, зависит от длины волны и условий распространения ЭМВ. При отражении от воздушных целей сложной формы эффект деполяризации может привести к потере принимаемой энергии, то есть к уменьшению измеряемой ЭПР [6, с. 76].
Приведенные выше доводы с очевидностью показывают, что ЛА различных конфигураций, изготовленные из различных материалов и имеющие различные углы визирования будут отличаться интенсивностью отраженных ими сигналов на различных видах поляризации, особенно в метровом диапазоне. Значит, существует объективная основа их идентификации по поляризационным признакам.
Возможен вариант идентичности отраженных различными целями сигналов на определенной поляризации, например, горизонтальной. Однако маловероятен случай, чтобы на всех предложенных к использованию видах поляризации сигналы, отраженные различными ЛА, имели одинаковую амплитуду, тем более, что динамический диапазон измерения амплитуды отраженных сигналов современными радиолокаторами велик.
Назовем набор отраженных от цели сигналов при различных видах поляризации ЭМВ поляризационным портретом цели (ППЦ). Пример ППЦ приведен на фиг. 1, а. Он разделен на 10 кластеров, значение амплитуды сигнала U(N) в каждом из которых соответствует вполне определенному виду поляризации. Например, амплитуда сигнала в 1-м кластере, расположенном на оси абсцисс между точками 0 и 1, соответствует отраженному от цели сигналу на линейной горизонтальной поляризации ( γ = 0o), амплитуда сигнала во 2-м кластере, расположенном на оси абсцисс между точками 1 и 2, соответствует отражению от цели на линейной вертикальной поляризации ( γ = 90o) и т.д.
Для получения такого ППЦ необходимо излучить 10 импульсов, каждый из которых имеет свою поляризацию. Приняв отраженные целью импульсы, после их преобразования и усиления в одинаковое число раз, следует перевести их в цифровой вид с помощью аналого-цифрового преобразователя и записать в запоминающее устройство (ЗУ). Набор записанных амплитуд в десяти ЗУ и представляет собой ППЦ. Его можно получить в обычной одноканальной РЛС, излучая импульсы последовательно и программным образом изменяя поляризацию от импульса к импульсу. Одновременное излучение импульсов с разной поляризацией не приведет к нужному результату по очевидным причинам. Кроме того, необходимо застробировать цель по дальности и сопровождать ее по угловым координатам, чтобы исключить попадание в канал обработки сигналов, отраженных другими целями, местными предметами и т.д. Более того, отраженные 10 импульсов должны быть получены на одном и том же ракурсе. Это уточнение сделано ввиду того, что цель в полете совершает колебательные движения, наиболее интенсивные из которых называют рысканиями цели. Для того, чтобы отражения всех десяти импульсов соответствовали одному и тому же ракурсу, необходимо, чтобы 10 периодов повторения импульсов Tи не превышали времени корреляции ТН полета цели, составляющего, согласно [8], величину порядка 0,025 с. Следовательно, для обеспечения неизменности ракурса локализации в период формирования поляризационного портрета необходимо, чтобы выполнялось условие Tи < tк/10, где tк - время корреляции ТН. Из этого получаем Tи < 0,025/10 = 2,5 мс, что вполне соответствует характеристикам современных импульсных РЛС.
Теперь необходимо вспомнить, что для распознавания цели по любому признаку, необходимо сравнить полученный в опыте результат с эталонным результатом. Однако, ввиду наличия ТН полета, ракурс цели постоянно меняется (колеблется вокруг некоторого среднего значения). Поэтому традиционный метод сравнения ППЦ с эталонным в данном случае не подходит. Предлагается формировать усредненный по множеству ракурсов ППЦ и только после этого сравнивать его с эталонным ППЦ, также полученным методом усреднения.
Стремясь снизить длительность одного цикла распознавания, целесообразно временной интервал усреднения ППЦ выбрать равным периоду ТН. В этом случае ППЦ усредняется по всем ракурсам, на которых может находиться цель в течение данного периода ТН. Зная приближенное значение периода ТН полета и удесятеренное значение периода повторения РЛС, можно найти число ракурсов локации, по которым производится усреднение ППЦ. Это делается по формуле K = Tтн/(10 Tи), где Tтн - период ТН. Если допустить, что Tтн = 3 с, а период повторения Tи = 300 мкс, то число усредняемых ракурсов будет равно K = 3/(10•3•10-4)=103, что более чем достаточно.
Таким образом, каждое из 10 ЗУ должно содержать цифровой сумматор, производящий суммирование всех сигналов, поступающих на его вход, а также счетчик числа приходящих сигналов. Счетчик и будет определять момент, когда закончится процесс накопления или суммирования сигналов в ЗУ. Затем результат цифрового суммирования амплитуд сигналов должен быть разделен на число этапов суммирования K. Так в каждом ЗУ формируется усредненная амплитуда отраженных сигналов на определенном виде поляризации. Совокупность указанных усредненных амплитуд представляет собой ППЦ, способный выступать в качестве информативного признака распознавания.
Поочередно сравнивая параметры полученного ППЦ с эталонным ППЦ, можно определить класс или даже тип распознаваемой цели. Отнесение цели к определенному типу можно производить следующим образом. В каждом кластере (в каждом ЗУ) хранится информация о среднестатистическом отраженном сигнале на определенной поляризации. Вычисляется абсолютная (модульная) разность между значением сигнала данного ЗУ и величиной сигнала в эталонном кластере, соответствующем опытному по поляризации. Затем эта же операция осуществляется в отношении второго, третьего и т.д. кластера. Вычисленные разности суммируются. Производится смена эталонного ППЦ, соответствующего сформированному ППЦ по ракурсу сопровождения, и операции вычисления разностей и их сложения повторяются. В конце производят сравнение полученных сумм для нахождения наименьшей. Тип эталонного ППЦ, для которого указанная сумма будет минимальной, принимается за тип распознаваемой цели.
ППЦ, показанные на фиг. 1,а,б,в упрощенно демонстрируют принцип формирования усредненного ППЦ для двух ракурсов. По первым десяти импульсам получают 1-й ППЦ, показанный на фиг. 1,а. Следующие 10 импульсов различной поляризации позволяют получить второй ППЦ. Если в формировании усредненного ППЦ участвуют только 2 частных ППЦ, то K = 2 и усредненный ППЦ получают сложением сигналов в соответствующих кластерах и делением суммы на K = 2. Например, во 2-м кластере ППЦ фиг. 1,а имеет амплитуду 5 единиц. Такой же кластер у ППЦ фиг. 1,б имеет амплитуду 3 единицы. Значит, в усредненном ППЦ второй кластер будет иметь амплитуду (3+5)/2=4 единицы (фиг. 1,в).
Для повышения помехозащищенности можно предложить изменять поляризацию импульсов каждой пачки не по одному и тому же закону, а сложным случайным образом. В этом случае управление формированием каждой пачки с 10-ю импульсами должно быть программным, что вполне под силу современным цифровым вычислительным системам (ЦВС). Датчик случайных чисел ЦВС должен определять для каждой пачки импульсов последовательность использования десяти различных видов поляризации. Поляризация излучаемых сигналов может меняться за счет изменения сдвига фаз между токами СВЧ, запитывающими ортогонально расположенные вибраторные антенны. Таких пар вибраторов может быть несколько. Можно предложить и другой способ излучения сигналов различной поляризации, основанный на использовании фазированных антенных решеток (ФАР). Важным при этом является то, куда (в какой кластер) попадет отраженный сигнал данного вида поляризации. Эту задачу может разрешить ПВС, которая должна не только обеспечивать формирование импульса заданной поляризации, но и направлять отраженный на этой поляризации сигнал в тот кластер (то ЗУ), где накапливаются отраженные сигналы только данного вида поляризации.
Можно предложить и другой способ реализации процедур, обеспечивающих формирование усредненного ППЦ. Для этого можно использовать 10 антенн, излучающих импульсы различной поляризации, причем каждая антенна излучает сигнал только определенной поляризации и на своей, отличной от других, частоте. Достоинством такого подхода является увеличение числа мгновенных опытных ППЦ в 10 раз при неизменном времени усреднения. Однако дороговизна исполнения является существенным недостатком. Поэтому одночастотный последовательный способ получения ППЦ является предпочтительным.
Как видно из описания предлагаемого способа распознавания целей, он имеет явные преимущества по сравнению с ранее известными. Способ легко реализуем в импульсных РЛС метрового диапазона современного парка, имеющих ФАР и управляющую ЦВС. Способ не требует высокой разрешающей способности по угловым координатам, поскольку использует угловое (временное) усреднение измеряемого параметра распознавания. Способ имеет высокие характеристики распознавания: малое время распознавания, большую вероятность принятия правильного решения, которая обусловлена многообразием используемых видов поляризации зондирующих сигналов. Способ обладает широкими потенциальными возможностями увеличения помехозащищенности, снижения ошибок измерения угловых координат и т.д.
Изобретение относится к радиолокационным измерениям и предназначено для идентификации воздушных целей. Достигаемый технический результат - увеличение вероятности правильного распознавания целей. Способ предусматривает облучение летательного аппарата, выбранного для распознавания, последовательностями импульсных сигналов, в которых каждый импульс имеет определенную, отличную от других, поляризацию, прием отраженных сигналов и их анализ, позволяющий сформировать поляризационный портрет цели, используемый в качестве информативного признака распознавания. 1 ил.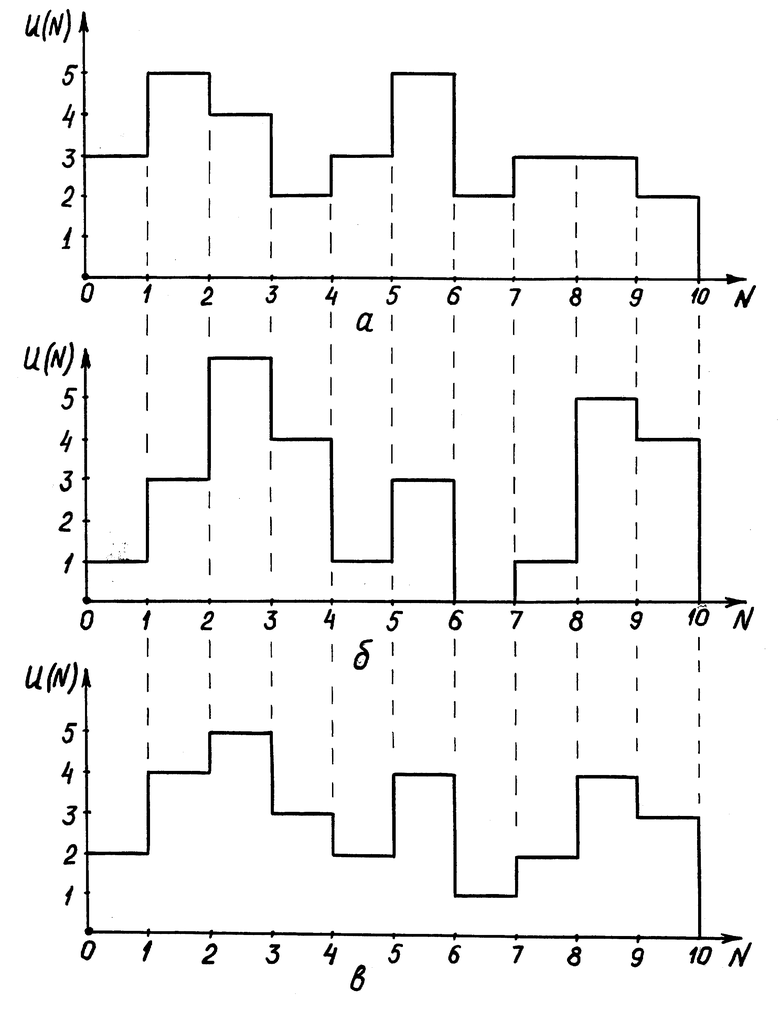
Способ распознавания целей по поляризационным отличиям отраженных сигналов, включающий излучение высокочастотных импульсных сигналов в направлении цели, приеме, усилении и детектировании отраженных от цели сигналов и поочередном сравнении формируемого признака распознавания с эталонными, принадлежащими различным классам целей, для отнесения распознаваемой цели к одному из классов, отличающийся тем, что исследованию подвергают генеральную выборку отраженных от цели импульсных сигналов метрового диапазона, состоящую из целого числа пачек, включающих по 10 импульсов, а при излучении от импульса к импульсу программных образов изменяют вид поляризации электромагнитной волны, применяя следующие 10 видов поляризации: линейная горизонтальная, линейная вертикальная, линейная с углом наклона плоскости поляризации 45o, линейная с углом наклона плоскости поляризации 135o, круговая левого вращения, круговая правого вращения, эллиптическая с углом наклона большой оси эллипса 45o правого вращения, эллиптическая с углом наклона большой оси эллипса 135o правого вращения, эллиптическая с углом наклона большой оси эллипса 45o левого вращения, эллиптическая с углом наклона большой оси эллипса 135o левого вращения, то есть в каждой последовательности или пачке из 10 импульсов каждый отдельный импульс будет иметь отличную от других поляризацию, причем распознаваемую цель стробируют по дальности и сопровождают по угловым координатам, чем обеспечивают попадание в приемный канал сигналов, отраженных только распознаваемой целью, а принятые, усиленные и продетектированные отраженные сигналы преобразовывают в цифровую форму и программным образом распределяют среди 10 цифровых накопительных сумматоров, в каждом из которых складываются амплитуды сигналов только одного определенного вида поляризации, подсчитывают число импульсных сигналов, поступивших на каждый накопительный сумматор, при этом каждая пачка из 10 последовательных импульсов не должна по времени превосходить время корреляции траекторных нестабильностей полета целей, составляющее 0,025 с, а используемая совокупность десятиимпульсных пачек должна быть соизмерима с периодом траекторных нестабильностей полета целей, составляющим 2 - 3 с, амплитуду суммарного сигнала каждого цифрового накопительного сумматора делят на число просуммированных им сигналов, чем обеспечивают вычисление усредненного по нескольким ракурсам значения амплитуды отраженного сигнала на соответствующем виде поляризации, совокупность вычисленных усредненных амплитуд отраженных сигналов на 10 видах поляризации принимают за поляризационный портрет цели, который используют при сравнении с эталонными поляризационными портретами подобного рода в качестве информативного признака распознавания.
| Небабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.38-43, 94-95 | |||
| Neil E | |||
| Chamberlain и др | |||
| Радиолокационная поляризационная идентификация самолетов | |||
| - Радиотехнические устройства и системы: Экспресс - информация | |||
| - М.: ВИНИТИ, 1992, N 19, с.15-22 | |||
| US 4660044 A, 21.04.87 | |||
| US 4490719 A, 25.12.84 | |||
| US 4255791 A, 10.03.81. |
