Изобретение относится к устройству подвески для пружинящей или же амортизационной подвески материального тела, например кабины грузового автомобиля, согласно ограничительной части пункта 1 формулы изобретения.
Устройства подвески указанного вначале вида применяются, например, однако ни в коем случае не исключительно, в грузовых автомобилях, сельскохозяйственных транспортных средствах или автомобилях большой грузоподъемности для того, чтобы как можно более существенно разъединить соответствующую кабину и шасси транспортного средства относительно колебаний и движений.
Поскольку в автомобилях большой грузоподъемности в связи со значительным весом транспортного средства, а также в связи с большими неподрессоренными массами в ходовой части жесткость пружин и амортизаторов неизбежно приходится выбирать большими, неровности дорожного полотна или же колебания из осей и трансмиссии зачастую еще в значительной части через подрессоривание осей предаются на шасси, а оттуда и на кабину.
Для того чтобы в смысле эргономики и охраны труда для водителя свести к минимуму перенос подобных толчков и вибраций на кабину и тем самым на рабочее место водителя, разработаны подвески кабины, в которых кабина опирается на шасси автомобиля с использованием собственной системы подвески. Такие системы подвески для кабины благодаря намного меньшей по сравнению с автомобилем массе кабины могут быть рассчитаны с более низкой жесткостью пружин, чем подвеска осей, из-за чего тогда неровности дорожного полотна или же происходящие из трансмиссии или осей автомобиля колебания благодаря таким сравнительно мягким системам подвески кабины могут быть явно лучше изолированы от рабочего места водителя.
Для того чтобы в известных из уровня техники упругих устройствах подвески кабины ограничить нежелательные боковые движения или же поперечные колебания кабины вокруг продольной оси относительно шасси автомобиля, например, при движении с наклоном или при повороте, а также, например, в случае односторонних неровностей дорожного полотна, разработаны устройства подвески, в которых между кабиной и шасси расположена структура систем шарнирных рычагов. При этом в зависимости от ее выполнения структура систем шарнирных рычагов обеспечивает то, что боковые движения кабины относительно шасси пресекаются или же то, что движения кабины, связанные с ходом пружины, относительно шасси происходят по существу линейно, то есть, что степени свободы перемещения между кабиной и шасси посредством структуры систем шарнирных рычагов сводятся прежде всего к вертикальному связанному с ходом пружины движению.
Устройство подвески такого вида известно, например, из DE 102005043998 А1. Это известное устройство подвески в зависимости от его конструктивной формы содержит одну или несколько систем шарнирных рычагов, которые обеспечивают то, что степени свободы движения кабины относительно шасси, например, грузового автомобиля сводятся к лишь вертикальному движению, или же то, что относительные колебательные движения кабины вокруг продольной оси относительно шасси пресекаются. В то же время являются неограниченно возможными линейные движения, связанные с ходом пружин, между кабиной и шасси вдоль вертикальной оси в пределах хода пружин кабины.
Хотя преимущественно жесткая связь относительно колебательных движений вокруг продольной оси между кабиной и шасси в этом известном устройстве подвески и обеспечивает то преимущество, что могут быть пресечены, прежде всего, самостоятельные колебательные движения кабины вдоль продольной оси относительно шасси. Однако, с другой стороны, это также приводит к тому, что кабина неизбежно следует каждому исходящему от шасси побуждению к поперечным колебаниям вокруг продольной оси. При этом угол колебаний кабины в поперечной плоскости является по меньшей мере таким же, но зачастую в связи с упругостями в креплении кабины и в системах шарнирных рычагов даже больше, чем угол исходящего от шасси побуждения к колебаниям в поперечной плоскости.
Однако при движении на повороте, движении с наклоном или в случае односторонних неровностей дорожного полотна это может приводить к тому, что кабина наклоняется по меньшей мере точно так же или даже сильнее, чем шасси автомобиля. Однако, из соображений комфорта и безопасности было бы желательно пресекать или по меньшей мере уменьшать боковые наклоны кабины при всех условиях движения. Кроме того, для комфорта водителя было бы также очень полезно, если бы, например, при парковке грузового автомобиля поперек уклона можно было пресекать или уменьшать перенос наклонного положения шасси на кабину.
На этом фоне задачей настоящего изобретения является создание устройства подвески для пружинящей подвески материального тела относительно основания, прежде всего для подвески кабины в грузовом автомобиле, с помощью которого могут быть преодолены указанные недостатки уровня техники. При этом прежде всего устройство подвески должно обеспечить возможность пресечения или компенсации нежелательных колебательных движений материального тела или же кабины в поперечной плоскости, в том числе и в случае колебательных возмущений в поперечной плоскости или наклонных положений основания или же шасси.
Эта задача решена посредством устройства подвески с признаками пункта 1 формулы изобретения. Предпочтительные варианты осуществления являются предметом зависимых пунктов формулы.
Устройство подвески само по себе известным образом служит прежде всего для пружинящей подвески материального тела относительно основания, то есть, например, подвески кабины грузового автомобиля относительно шасси автомобиля.
Самим по себе также известным образом устройство подвески содержит расположенную между материальным телом и основанием структуру пружин и амортизаторов для амортизации толчков или же колебаний, а также, кроме того, структуру систем шарнирных рычагов по меньшей мере с одной относительно подвижно соединяющей материальное тело и основание системой шарнирных рычагов. При этом по меньшей мере одна система шарнирных рычагов служит уменьшению степеней свободы движения материального тела относительно основания, например по существу линейного направления материального тела или же кабины вдоль (вертикального) основного направления ударов основания или же шасси.
Однако согласно изобретению устройство подвески отличается тем, что по меньшей мере одна из точек шарнирного соединения системы шарнирных рычагов относительно подвижно соединена с материальным телом или основанием. При этом относительное положение между точкой соединения системы шарнирных рычагов и материальным телом является регулируемым посредством по меньшей мере одного воздействующего по существу линейно исполнительного органа.
За счет возможности изменения относительного положения между точкой шарнирного соединения системы шарнирных рычагов и материальным телом или же основанием согласно изобретению обеспечивается возможность того, что нежелательным колебаниям материального тела в поперечной плоскости относительно основания, то есть, например, нежелательным боковым наклонам кабины грузового автомобиля, может оказываться прежде всего активное противодействие за счет того, что точка шарнирного соединения системы шарнирных рычагов относительно ее соединения с материальным телом или же основанием посредством исполнительного органа смещается.
Другими словами, это означает, что угол колебаний в поперечной плоскости между материальным телом и основанием, то есть, например, между кабиной и шасси грузового автомобиля, таким образом может быть активно изменен для того, чтобы тем самым, например, в случае боковых наклонов шасси, тем не менее, сохранять горизонтальное позиционирование кабины или по меньшей мере поддерживать боковой наклон кабины меньшим, чем боковой наклон шасси.
При этом осуществление изобретения возможно прежде всего независимо от того, каким образом конструктивно выполнен исполнительный орган и присоединен по меньшей мере к одной системе шарнирных рычагов, пока изменение длины исполнительного органа приводит к изменению угла колебаний материального тела или же кабины в поперечной плоскости относительно основания.
Однако согласно одному предпочтительному варианту осуществления по меньшей мере один исполнительный орган посредством расположенного по существу перпендикулярно направлению воздействия исполнительного органа плеча рычага присоединен по меньшей мере к одной точке шарнирного соединения системы шарнирных рычагов. При этом направление воздействия исполнительного органа предпочтительно проходит по существу перпендикулярно направлению прямолинейной направляющей по меньшей мере одной системы шарнирных рычагов.
Таким образом, в зависимости от длины плеча рычага может быть создан вращающий момент между точкой шарнирного соединения системы шарнирных рычагов, на которую воздействует исполнительный орган, и материальным телом или же кабиной. Тем самым посредством этого реализованного исполнительным органом вращающего момента может быть оказано прежде всего активное противодействие нежелательным колебаниям кабины в поперечной плоскости.
Этот вариант осуществления может быть использован для стабилизации колебаний в поперечной плоскости, например, и в том случае, если структура систем шарнирных рычагов устройства подвески содержит только одну, а не несколько систем шарнирных рычагов. При этом одна система шарнирных рычагов служит прежде всего для пресечения боковых (поступательных) движений материального тела или же кабины относительно основания.
Присоединенный посредством одного плеча рычага исполнительный орган в этом случае может быть привлечен как к активной стабилизации колебаний в поперечной плоскости, так и к приблизительному параллельному направлению материального тела или же кабины вдоль направления движения пружинящей подвески.
Согласно еще одному варианту осуществления изобретения по меньшей мере одна точка шарнирного соединения системы шарнирных рычагов упруго соединена с материальным телом или же основанием. При этом по меньшей мере один исполнительный орган (в отношении к его эффективному изменению длины) расположен между точкой шарнирного соединения и материальным телом или же между точкой шарнирного соединения и основанием. Другими словами, это означает, что за счет изменения длины исполнительного органа может регулироваться положение точки соединения между системой шарнирных рычагов и материальным телом или же точки соединения между системой шарнирных рычагов и основанием за счет того, что посредством исполнительного органа деформируется упругое соединение этой точки шарнирного соединения, в случае которой речь может идти прежде всего об эластомерном подшипнике.
В этом варианте осуществления одновременно получаются способности устройства подвески сохранять служебные свойства при возможном отказе исполнительного органа. Дело в том, что в таком случае упругое присоединение регулируемой исполнительным органом точки соединения, посредством которой система шарнирных рычагов присоединена к кабине или же основанию, в связи с ее пружинящими силами самостоятельно возвращается в среднее положение.
Согласно еще одному предпочтительному варианту осуществления изобретения упругое соединение между соединенной с исполнительным органом точкой шарнирного соединения системы шарнирных рычагов и материальным телом или же основанием имеет разные коэффициенты жесткости пружины по меньшей мере в двух направлениях в пространстве. За счет этого могут быть установлены независимые друг от друга разные жесткости пружины для различных функций системы шарнирных рычагов или же для различных направлений движения материального тела или кабины. Так, например, жесткость пружины упругого соединения в вертикальном направлении может определять жесткость системы шарнирных рычагов относительно колебаний материального тела или же кабины в поперечной плоскости, в то время как отличная от этого жесткость пружины упругого соединения в горизонтальном направлении устанавливает жесткость системы шарнирных рычагов относительно боковых движений материального тела или кабины.
Согласно еще одному предпочтительному варианту осуществления изобретения устройство подвески отличается тем, что структура систем шарнирных рычагов содержит две системы шарнирных рычагов. При этом направления прямолинейных направляющих по меньшей мере двух систем шарнирных рычагов совпадают, системы шарнирных рычагов расположены на расстоянии друг от друга вдоль общего направления прямолинейных направляющих и плоскости движения систем шарнирных рычагов проходят параллельно друг другу.
Этот содержащий по меньшей мере две разнесенных системы шарнирных рычагов конструктивный вариант имеет то преимущество, что дополнительно к прямолинейной направляющей материального тела, которая реализуется уже с одной единственной системой шарнирных рычагов прежде всего без дополнительных вспомогательных средств эффективно подавляются и колебательные движения материального тела или же кабины в поперечной плоскости относительно шасси. Это связано с тем, что расположенные на расстоянии друг от друга системы шарнирных рычагов между основанием и материальным телом могут передавать или же отводить не только поперечные силы (как одна отдельная система шарнирных рычагов), но в связи с воздействующим как плечо рычага расстоянием между системами шарнирных рычагов также и вращающие моменты, прежде всего моменты колебаний в поперечной плоскости.
На этом фоне согласно еще одному особенно предпочтительному варианту осуществления изобретения далее предусмотрено, что соотнесенные с двумя поперечными шатунами обеих систем шарнирных рычагов внешние точки шарнирного соединения расположены соответственно попарно на одной общей для обеих систем шарнирных рычагов поворотной оси. К тому же при этом поперечные шатуны разных систем шарнирных рычагов попарно выполнены соответственно монолитно в виде, например, V-образного комбинированного шатуна. За счет этого прежде всего внешние точки шарнирного соединения поперечных шатунов обеих систем шарнирных рычагов делят в целом только две шарнирных оси вместо того, чтобы, как при двух отдельных системах шарнирных рычагов, нагружать четыре шарнирные оси.
Кроме того, этот конструктивный вариант, при котором два совместно шарнирно присоединенных поперечных шатуна образуют соответственно похожую на треугольный рычаг V-образную деталь, дает прежде всего конструктивные упрощения за счет того, что значительно уменьшается количество необходимых конструктивных деталей, прежде всего количество необходимых шарнирных соединений. Так как в этом случае требуется не четыре поворотные опоры, как при двух системах шарнирных рычагов с отдельно установленными поперечными шатунами, а только две поворотные опоры для присоединения внешних точек шарнирного соединения всех четырех поперечных шатунов обеих систем шарнирных рычагов. Тем самым таким образом экономятся детали, а поэтому и затраты. Кроме того, таким образом структура систем шарнирных рычагов является особенно компактной и экономящей монтажное пространство и конструктивно требуется только две (вместо четырех) точки шарнирного соединения со стороны рамы.
Так как произведенные обоими шарнирными рычагами, воздействующие на точки шарнирного соединения со стороны рамы силы при этой структуре на основе векторного сложения частично взаимно уничтожаются, детали шарнирного соединения со стороны рамы могут быть рассчитаны более легкими и тем самым более экономичными, чем при двух системах шарнирных рычагов с отдельно присоединенными поперечными шатунами. Кроме того, при использовании эластомерных подшипников могут быть применены уменьшенные жесткости для эластомерных подшипников, что обещает лучшую звукоизоляцию. Наконец, таким образом все поперечные шатуны обеих систем шарнирных рычагов без проблем могут быть расположены в одной и той же плоскости движения, что еще раз экономит монтажное пространство.
Согласно еще одному варианту осуществления изобретения две разные точки шарнирного соединения, состоящего из по меньшей мере двух систем шарнирных рычагов структуры систем шарнирных рычагов, посредством двух исполнительных органов могут быть относительно подвижно соединены с материальным телом или же основанием. За счет применения двух воздействующих на разных точках шарнирного соединения структуры систем шарнирных рычагов исполнительных органов вследствие последовательного включения и сложения путей приведения в действие обоих исполнительных органов получается прежде всего больший регулировочный диапазон без необходимости выполнения для этого более длинных исполнительных органов или больших путей перемещения. Кроме того, таким образом достигается симметричная компенсация колебательных движений вокруг находящейся в средней плоскости кабины продольной оси.
Согласно альтернативному этому варианту осуществления изобретения предусмотрено, что точка шарнирного соединения по меньшей мере одного исполнительного органа на структуре системы шарнирных рычагов соединена с точкой поворота одного из шарнирных рычагов структуры систем шарнирных рычагов. При этом одновременно направление воздействия по меньшей мере одного исполнительного органа проходит по существу перпендикулярно направлению прямолинейной направляющей структуры систем шарнирных рычагов.
В этом варианте осуществления получается прежде всего особенная компактная система и в то же время хорошее рычажное действие исполнительного органа, а также связанные с этим сравнительно малые усилия и соответственно экономная размерность для исполнительного органа. Это связано со значительным расстоянием между обоими шарнирными рычагами структуры систем шарнирных рычагов, которое в этом варианте осуществления образует плечо рычага для произведенного исполнительным органом вращающего момента в качестве противоположного полюса внешнему моменту колебаний в поперечной плоскости.
Кроме того, в этом варианте осуществления по сравнению с вариантом осуществления с попарным воздействием исполнительного органа на опорных точках поперечных шатунов в связи с воздействием исполнительного органа непосредственно на один из шарнирных рычагов структуры систем шарнирных рычагов (то есть в середине структуры систем шарнирных рычагов относительно направления движения) получается то преимущество, что управляемое исполнительным органом изменение угла колебаний в поперечной плоскости таким образом происходит непосредственно вокруг точки поворота соответственно другого шарнирного рычага структуры систем шарнирных рычагов, которая также расположена в середине структуры систем шарнирных рычагов. За счет этого также отпадает необходимость во втором исполнительном органе, как это требуется в вышеуказанных вариантах осуществления, если и там должно происходить желательное изменение угла колебаний в поперечной плоскости вокруг центральной оси материального тела или же кабины.
Кроме того, посредством расположения направления воздействия исполнительного органа по существу перпендикулярно направлению прямолинейной направляющей структуры систем шарнирных рычагов получается оптимальная развязка между прямолинейной направляющей системы шарнирных рычагов, например вертикального направления кабины грузового автомобиля, с одной стороны, и оказанием влияния на колебательные движения в поперечной плоскости воздействующим в этом случае по существу в горизонтальном направлении исполнительным органом.
На этом фоне согласно еще одному варианту осуществления изобретения предусмотрено, что имеется только один исполнительный орган, при этом точка шарнирного соединения исполнительного органа на структуре систем шарнирных рычагов соединена с точкой поворота того шарнирного рычага структуры систем шарнирных рычагов, которая имеет большее расстояние до материального тела. Таким образом, расстояние между центром тяжести материального тела или же кабины и образованным точкой поворота соответственно другого шарнирного рычага центром вращения сводится к минимуму, в результате чего сводятся к минимуму и прежде всего для кабины, нежелательные боковые движения в случае изменения исполнительным органом угла колебаний в поперечной плоскости.
Согласно еще одному варианту осуществления изобретения предусмотрено, что параллельно исполнительному органу подключен пружинный элемент. Таким образом и при возможном отказе исполнительного органа сохраняется остаточная жесткость опоры против колебаний в поперечной плоскости за счет того, что пружинный элемент удерживает возможно отказавший исполнительный орган в его среднем положении и при возможных отклонениях (колебательных движениях в поперечной плоскости) снова возвращает его туда.
Изобретение может быть осуществлено не зависимо от того, какого вида является исполнительный орган и как он конструктивно выполнен, если исполнительным органом могут быть произведены необходимые для стабилизации колебаний в поперечной плоскости усилия. На этом фоне согласно еще одному варианту осуществления изобретения предусмотрено, что исполнительный орган выполнен как пассивный, как полуактивный или как активный исполнительный орган. При этом пассивный исполнительный орган, например, в простейшей форме может быть реализован в виде пружинного элемента, полуактивный исполнительный орган, например, может быть образован гидравлическим амортизатором или газонаполненным амортизатором, а активный исполнительный орган, например, в виде гидравлического, пневматического или электрического линейного исполнительного органа.
На этом фоне и в этом варианте осуществления изобретения является, например, возможным дополнительно переоборудовать устройство подвески согласно изобретению от только пассивной до полуактивной или активной системы просто путем замены исполнительного органа и, при необходимости, соответствующего управления.
Далее изобретение поясняется более детально на представляющих лишь примеры осуществления чертежах. При этом показано на:
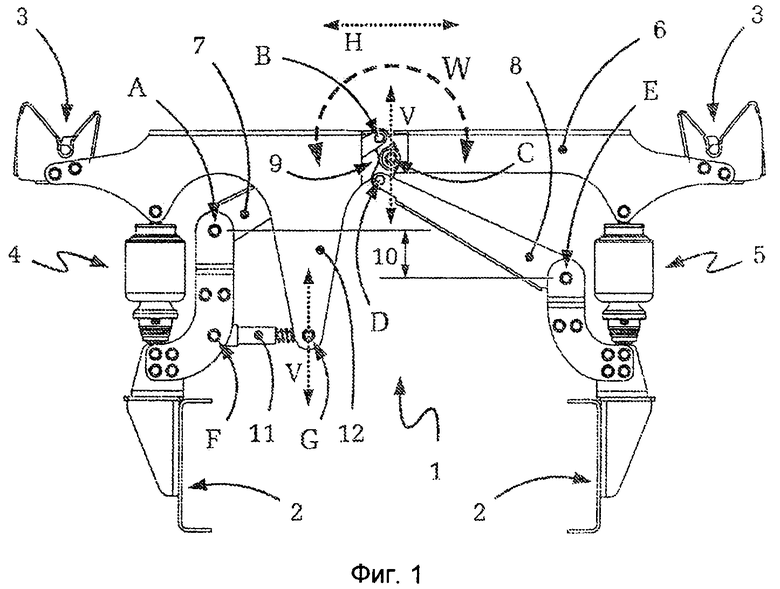
Фиг.1: в схематическом изображении конструктивная форма структуры подвески с системой шарнирных рычагов и исполнительным органом согласно настоящему изобретению,
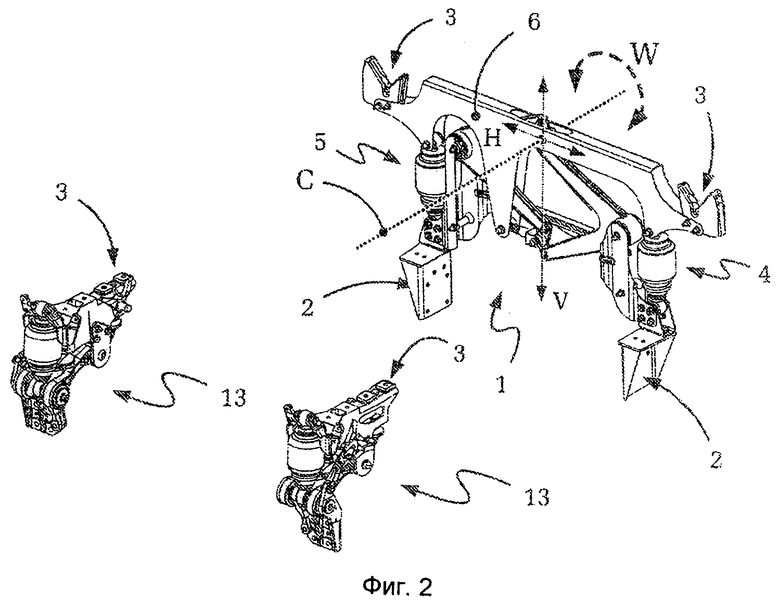
Фиг.2: в изометрическом изображении пример встраивания конструктивной формы устройства подвески согласно изобретению,
Фиг.3: в соответствующем фиг.1 изображении и виде конструктивная форма устройства подвески согласно изобретению с двумя исполнительными органами,
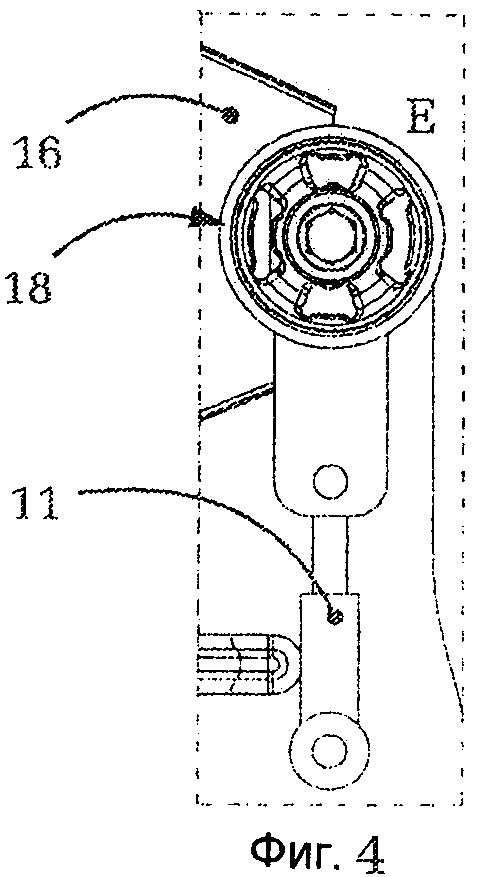
Фиг.4: в увеличенном изображении выреза присоединение одного из исполнительных органов в случае с устройством подвески согласно фиг.3,
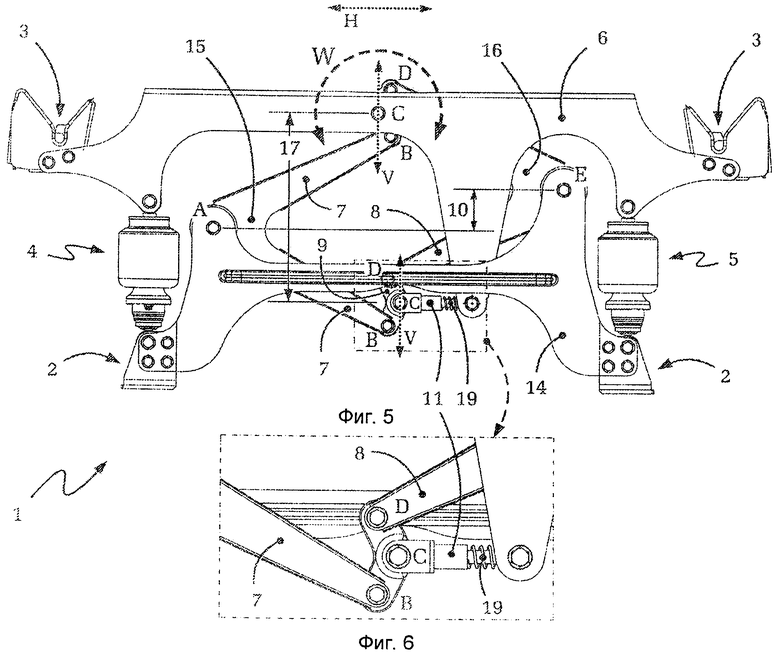
Фиг.5: в соответствующем фиг.1 или же фиг.3 изображении и виде конструктивная форма устройства подвески согласно изобретению с воздействием исполнительного органа на шарнирный рычаг, и
Фиг.6: в увеличенном изображении выреза присоединение исполнительного органа на шарнирном рычаге в случае с устройством подвески согласно фиг.5.
На фиг.1 в схематическом изображении показана конструктивная форма устройства 1 подвески согласно настоящему изобретению. Устройство 1 подвески служит для поддержки (непоказанной) кабины грузового автомобиля в области заднего конца кабины, относительно схематически обозначенного на фиг.1 шасси 2 грузового автомобиля. Для установки и поддержки кабины устройство 1 подвески согласно фиг.1 снабжено двумя точками 3 установки.
Кроме того, на фиг.1 видно, что расположенное между кабиной и шасси 2 устройство 1 подвески, кроме двух пружинно/амортизационных устройств 4, 5, содержит систему шарнирных рычагов с пятью шарнирами, которые обозначены буквами A, B, C, D, E. Из шарниров A-E в изображенной конструктивной форме A и E неподвижно соединены с шасси, а C неподвижно соединен с кабиной или же с верхним поперечным мостом 6 устройства 1 подвески. При этом шарнирные точки A-E системы шарнирных рычагов соединены друг с другом посредством системы из двух поперечных шатунов 7, 8 и центрального шарнирного рычага 9.
При этом в связи с особой самой по себе известной кинематикой системы A, B, C, D, E шарнирных рычагов согласно фиг.1 боковые поперечные движения Н кабины или же соединенного с кабиной верхнего поперечного моста 6 устройства подвески относительно шасси 2 воспринимаются соответственно шарнирами C, A и E системы шарнирных рычагов и тем самым пресекаются. Однако вертикальное движение V между кабиной и шасси 2 в связи со свободной вертикальной подвижностью соответствующего шарнирного рычага 9 остается полностью без помех и воспринимается или же улавливается лишь пружинно/амортизационными устройствами.
Тем самым возникающие статические или динамические поперечные силы переносятся и отводятся непосредственно через поперечные шатуны 7 и 8, через шарнирный рычаг 9, а также через шарниры A-E между кабиной и шасси 2, так что во всяком случае в области системы шарнирных рычагов, то есть в данной конструктивной форме в задней области кабины, наряду с системой шарнирных рычагов не требуется никакого дополнительного направления или опоры кабины.
Это связано с тем, что средняя точка C поворота шарнирного рычага 9 в связи с его направлением посредством обоих приданных шарнирному рычагу 9 поперечных шатунов 7 и 8, которые для этого должны иметь одинаковую длину, а внешние точки A и E шарнирного соединения которых должны иметь вертикальное расстояние 10, которое соответствует вертикальному размеру шарнирного рычага 9, не может покидать ее обозначенную на фиг.1 двунаправленной пунктирной стрелкой V траекторию движения. Для этого верхний поперечный мост 6 или же кабина и шасси 2, также прежде всего постоянно, удерживаются в показанном взаимно друг над другом центрированном положении. Таким образом, относительного поперечного движения кабины относительно шасси 2 благодаря системе A, B, C, D, E шарнирных рычагов не происходит.
Кроме того, на фиг.1 виден исполнительный орган 11, который посредством плеча 12 рычага соединен с соединенным с кабиной верхним поперечным мостом 6 устройства 1 подвески и тем самым с точкой C шарнирного соединения центрального шарнирного рычага 9 системы шарнирных рычагов, при этом (здесь горизонтальное) направление воздействия исполнительного органа 11 проходит перпендикулярно направлению V прямолинейной направляющей системы шарнирных рычагов.
В силу такого расположения исполнительный орган 11 в этой конструктивной форме выполняет двойную функцию. C одной стороны, посредством присоединенного у F, G исполнительного органа 11 вместе с точками A, C подвески системы шарнирных рычагов получается приблизительный параллелограмм A, C, G, F и тем самым уже приблизительное параллельное направление соединенного с кабиной верхнего поперечного моста 6 устройства 1 подвески вдоль вертикального направления V движения. Таким образом достигается уже приближение к стабилизации колебаний в поперечной плоскости верхнего поперечного моста 6 или же кабины относительно нежелательных колебательных движений W в поперечной плоскости вокруг продольной оси С автомобиля.
Кроме того, с другой стороны, расположенный таким образом исполнительный орган 11 может быть применен и для активной стабилизации или же компенсации нежелательных колебательных движений W в поперечной плоскости за счет того, что при регистрации нежелательных колебательных движений W в поперечной плоскости посредством подходящей схемы датчиков и управления длина исполнительного органа 11 активно изменяется так, что оказывается противодействие колебательным движениям W в поперечной плоскости или же нежелательные колебательные движениям W в поперечной плоскости компенсируются.
Таким образом также возможно активное оказание влияния на статический угол колебаний кабины в поперечной плоскости. Так, кабина может, например, при парковке грузового автомобиля быть активно наклонена поперек уклона на определенную величину W угла против направления уклона вокруг продольной оси C автомобиля для того, чтобы таким образом улучшить комфорт для водителя.
На фиг.2 изометрически показана возможная ситуация встраивания устройства 1 подвески согласно изобретению. Прежде всего видна конструктивная форма устройства 1 подвески согласно настоящему изобретению, которая так же, как конструктивная форма согласно фиг.1, расположена в области заднего конца (непоказанной) кабины грузового автомобиля и посредством соответствующих креплений 2 соединена с шасси грузового автомобиля.
При этом переднее присоединение кабины на шасси происходит самим по себе известным образом посредством подрессоренных сдвоенных карданов 13 и еще двух опорных точек 3 для кабины. B показанной на фиг.2 конструктивной форме само устройство 1 подвески выполнено в виде комбинации из двух систем шарнирных рычагов и тем самым соответствует по существу конструктивной форме согласно фиг.5.
Таким образом, устройство 1 подвески согласно фиг.2 с обеими ее соединенными системами шарнирных рычагов обеспечивает то, что в задней особенно мягко подвешенной области кабины возможны только вертикальные связанные с ходом пружин движения V, и дополнительно то, что в поперечной плоскости вокруг продольной оси С кабины не возникает никаких нежелательных колебательных движений W.
На фиг.3 в соответствующем фиг.1 виде показана еще одна конструктивная форма устройства 1 подвески согласно изобретению, в которой прежде всего имеется две системы A, B, C, D, E шарнирных рычагов, при этом обе системы A, B, C, D, E шарнирных рычагов здесь расположены вертикально друг над другом. При этом соотнесенные с поперечными шатунами 7, 8 обеих систем A, B, C, D, E шарнирных рычагов внешние точки А, Е шарнирного соединения расположены попарно на соответственно общей для обеих систем шарнирных рычагов поворотной оси у A или E на нижнем поперечном мосту 14 устройства 1 подвески. К тому же соответственно два поперечных шатуна 7, 8 разных систем A, B, C, D, E шарнирных рычагов выполнены попарно в виде соответственно комбинированного шатуна 15 или же 16 как монолитная деталь.
Эта конструктивная форма, в которой совместно присоединенные у A, E поперечные шатуны образуют тем самым соответственно похожую здесь на треугольный рычаг 15, 16 V-образную деталь, имеет по сравнению с устройством подвески с двумя отдельными системами шарнирных рычагов в связи с отсутствием нескольких необходимых там точек опоры прежде всего значительные конструктивные упрощения. Возникающие в этой конструктивной форме при связанных с ходом пружин движениях незначительные кинематические напряжения в монолитных комбинированных шатунах 15, 16 без проблем перехватываются посредством легкой упругой деформации V-образных комбинированных шатунов 15, 16.
Структуры систем шарнирных рычагов с двумя расположенными вертикально на расстоянии друг от друга системами шарнирных рычагов имеют по сравнению с конструктивными формами только с одной системой шарнирных рычагов (см., например, фиг.1) прежде всего то преимущество, что так реализуется не только прямолинейная направляющая верхнего поперечного моста 6 (или же кабины) относительно шасси 2 вдоль вертикали V, но и что таким образом непосредственно может происходить и стабилизация относительно вращательных движений, то есть относительно нежелательных колебательных движений W в поперечной плоскости.
Это обосновано тем, что обе согласно фиг.3 расположенные на взаимном вертикальном расстоянии 17 между шасси 1 и кабиной 3 системы шарнирных рычагов A, B, C, D, E не только, как при одной единственной системе шарнирных рычагов (см., например, конструктивный пример согласно фиг.1), могут передавать поперечные усилия вдоль горизонтали H. Более того, таким образом благодаря воздействующему как плечо рычага вертикальному расстоянию 17 между обеими системами шарнирных рычагов могут передаваться и вращающие моменты, которые действуют вокруг продольной оси автомобиля, в случае которых речь идет о моментах W колебаний в поперечной плоскости согласно фиг.1-3.
Другими словами, это означает, что кабина в изображенном на фиг.3 конструктивном примере прежде всего может совершать лишь еще (нежелательные) вертикальные компенсационные движения вдоль пунктирных линий V относительно шасси 2, что, однако, боковые относительные движения Н, как и вращения W кабины относительно шасси 2, благодаря изображенному двойному устройству с системами шарнирных рычагов прежде всего пресекаются.
Однако, как описано вначале, это приводит прежде всего к тому, что шасси 2 и кабина относительно моментов колебаний или же колебательных движений W в поперечной плоскости соединены друг с другом в значительной степени жестко, так что при возможном наклонном положении шасси 2 это наклонное положение (возможно нежелательно) также переносится и на верхний поперечный мост 6 и тем самым на кабину. Это относится как к динамическому случаю, то есть, например, во время езды, так и к статическому случаю, например при поставленном поперек уклона автомобиле.
Однако конструктивная форма согласно фиг.3 отличается от конструктивной формы согласно фиг.1 также и тем, что в конструктивной форме согласно фиг.3 имеется не только один, а два исполнительных органа 11, которые соответственно воздействуют на эластомерный шарнир A или же E устройства подвески. При этом воздействие соответствующих исполнительных органов 11 на эластомерном шарнире A или же E еще раз в увеличенном виде показано на фиг.4. В соответствии с этим исполнительные органы 11 шарнирно присоединены на соответственно обоих концах к устройству 1 подвески, при этом на чертеже нижний конец соответствующего исполнительного органа 11 соединен с нижним поперечным мостом 14 устройства 1 подвески, в то время как верхний конец соответствующего исполнительного органа 11 присоединен к той части эластомерного шарнира A или же E соответствующего комбинированного шатуна 15, 16 (здесь к внешней шарнирной муфте 18), которая (часть) соединена соответственно с приданным шарниру комбинированным шатуном 15, 16.
Благодаря созданной таким образом возможности регулировки с помощью исполнительных органов упругих точек A или же E шарнирного соединения обоих V-образных комбинированных шатунов 15, 16 в конструктивной форме согласно фиг.3 возможно достижение того, что кабина сохраняет ее горизонтальное положение и при наклонных положениях шасси 2. Так как при определении датчиками наклонного положения шасси 2 посредством соответствующего управления обоими исполнительными органами 11 и связанного с этим вращения всей структуры систем шарнирных рычагов обеспечивается то, что центральные точки C шарнирного соединения обоих шарнирных рычагов B-C-D горизонтально перемещаются относительно друг друга так, что верхний поперечный мост 6 устройства 1 подвески, а тем самым и кабина сохраняют горизонтальное положение.
В конструктивном примере согласно фиг.3 и 4 эластомерные опоры A и E, которыми оба V-образных комбинированных шатуна 15, 16 обеих систем шарнирных рычагов соединены с нижним поперечным мостом 14, имеют, кроме того, две разные жесткости пружины. Первая жесткость вдоль горизонтали H обеспечивает расцепление кабины относительно горизонтальных колебаний из шасси автомобиля, в то время как вторая в значительной степени независимая от первой жесткость пружины обеих эластомерных опор A и E вдоль вертикали V обеспечивает то, что в распоряжении имеется достаточно пути движения для исполнительных органов 11 для регулировки горизонтального положения кабины.
В то же время при возможном отказе исполнительных органов 11 или их системы управления жесткость пружины эластомерных опор A и E действует вдоль вертикали V в смысле остаточной жесткости пружины в качестве функции аварийного хода. То есть в таком случае не возникает неконтролируемого перекоса кабины или полного отказа опоры против колебаний поперечной плоскости, а верхний поперечный мост 6 и тем самым кабина автомобиля стабилизируются посредством остающихся, вертикальных сил возврата эластомерных опор A и E параллельно шасси.
На фиг.5 показана еще одна конструктивная форма устройства 1 подвески согласно изобретению с двумя системами A, B, C, D, E шарнирных рычагов. Устройство 1 подвески согласно фиг.5 отличается от имеющего сходную конструкцию устройства согласно фиг.3 прежде всего тем, что имеется лишь один исполнительный орган 11, а также, кроме того, расположением и позиционированием исполнительного органа 11.
Так же как и устройство подвески согласно фиг.3, устройство подвески согласно фиг.5 прежде всего содержит устройство из двух систем A, B, C, D, E шарнирных рычагов, при этом поперечные шатуны 7, 8 обеих систем A, B, C, D, E шарнирных рычагов выполнены соответственно также попарно монолитными в виде V-образных комбинированных шатунов 15, 16.
Однако в отличие от устройства подвески согласно фиг.3 здесь имеется только один исполнительный орган 11, который к тому же воздействует не на одной из точек А или Е подвески V-образных шатунов 15, 16 поперечного сдвига, а, напротив, соотнесен непосредственно с одним из обоих шарнирных рычагов 9. Другими словами, это означает, что в этой конструктивной форме точки С поворота обоих шарнирных рычагов 9, прежде всего относительно нижнего поперечного моста 14 устройства 1 подвески, постоянно остаются расположеными вертикально друг над другом и тем самым непосредственно следуют колебательным движениям W шасси 2 в поперечной плоскости.
Амортизация или же компенсация колебательных движений W в поперечной плоскости в этом варианте осуществления изобретения реализуется за счет того, что верхний поперечный мост 6 устройства 1 подвески посредством исполнительного органа 11 поворачивается относительно точки поворота одного из обоих шарнирных рычагов. В показанной конструктивной форме согласно фиг.5 этот поворот или же компенсация колебаний в поперечной плоскости происходит с точкой C поворота верхнего из обоих шарнирных рычагов в качестве центра вращения посредством того, что исполнительный орган 11 соотнесен с нижним из обоих шарнирных рычагов 9 и соединен с ним.
Это является благоприятным прежде всего в том отношении, что по сравнению с конструктивным вариантом согласно фиг.3 требуется только один исполнительный орган 11 для того, чтобы повернуть верхний поперечный мост 6 или же кабину вокруг лежащей в их плоскости симметрии центральной оси C. Кроме того, таким образом точка C поворота, вокруг которой поворачивается верхний поперечный мост 6 или же кабина автомобиля при этой конструктивной форме, может быть подведена как можно ближе к центру тяжести кабины. За счет этого сводятся к минимуму вызванные компенсацией колебаний в поперечной плоскости боковые движения центра тяжести кабины автомобиля. Однако, если бы по конструктивным причинам возникала соответствующая необходимость, то точка С поворота верхнего поперечного моста 6 также могла быть положена на нижний из обоих шарнирных рычагов 9, а исполнительный орган 11 мог быть соотнесен с верхним шарнирным рычагом.
Кроме того, в конструктивной форме согласно фиг.5 уже более не требуется специально предусматривать сравнительно высокую упругость точек A, E шарнирного соединения комбинированных шатунов 15, 16 на нижнем поперечном мосту для того, чтобы обеспечить в конструктивной форме согласно фиг.3 все еще требующуюся для компенсации колебаний в поперечной плоскости степень свободы движения комбинированных шатунов 15, 16 в вертикальном направлении V.
Напротив, конструктивная форма согласно фиг.5 и 6 обеспечивает возможность того, что соединение комбинированных шатунов 15, 16 с нижним поперечным мостом 14 на их точках A, E шарнирного соединения во всяком случае относительно вертикальной присоединения) также может быть рассчитано очень жестким. За счет этого улучшается возможность регулирования относительно нежелательных колебательных движений W в поперечной плоскости посредством исполнительного органа 11, так как таким образом сводятся к минимуму или же исчезают вторичные колебательные эффекты в связи с упругостью присоединения системы шарнирных рычагов прежде всего в вертикальном присоединении в шарнирных точках A и E. За счет этого повышается также и надежность и срок службы эластомерных опор A и E, посредством которых комбинированные шатуны 15, 16 присоединены к нижнему поперечному мосту 14.
Однако независимо от этого жесткость боковой направляющей устройства 1 подвески по-прежнему устанавливается в соответствии с пожеланиями или же изменяемо, при этом эластомерные опоры A и E V-образных комбинированных шатунов 15, 16 в точках их соединения с нижним поперечным мостом 14 получают соответствующую податливость или же коэффициент жесткости пружины вдоль горизонтали H, в то время как зависящий от этого коэффициент жесткости пружины эластомерных опор A и E вдоль вертикали V по-прежнему может быть выбран неизменно жестким. Также характеристики колебаний в поперечной плоскости и боковой податливости могут быть соответственно адаптированы в зависимости от случая применения и требований заказчика за счет того, что выбираются подходящие эластомерные опоры A и E с соответствующими и, при необходимости, разными жестокостями пружины в горизонтальном Н или же вертикальном V направлении.
Для того чтобы и в конструктивной форме согласно фиг.5 получить желательную способность сохранять служебные свойства при разрушении или же остаточную жесткость опоры против колебаний в поперечной плоскости параллельно исполнительному органу 11, аналогично конструктивному примеру согласно фиг.1, подключен пружинный элемент 19.
Это следует прежде всего из увеличенного изображения выреза согласно фиг.6. Пружинный элемент 19 обеспечивает то, что исполнительный орган 11 при возможном отказе из любого положения возвращается в его среднее положение, за счет чего, например, установленный относительный угол W колебаний в поперечной плоскости между верхним 6 и нижним поперечным мостом 14 или же между кабиной и шасси 2 снова может быть установлен соответственно на нуль или уменьшен.
При этом, однако, в отличие от конструктивного примера согласно фиг.1 не требуется, чтобы исполнительный орган 11 подрегулировался для того, чтобы таким образом обеспечить параллельный упругий прогиб кабины. Напротив, активное управление исполнительного органа 11 в конструктивном примере согласно фиг.5 требуется только тогда, когда фактически должен быть изменен относительный угол W колебаний в поперечной плоскости между кабиной и шасси 2.
В связи с длинным эффективным плечом 17 рычага, которым исполнительный орган 11 воздействует на верхнем поперечном мосту 6, к тому же получается благоприятная передача усилия с соответственно компактной и экономной возможностью расчета относительно поперечного сечения исполнительного органа. Кроме того, в этой конструктивной форме исполнительный орган 11 расположен хорошо защищенным и не требует достойного упоминания дополнительного монтажного пространства по сравнению с конструктивной формой без активной стабилизации колебаний в поперечной плоскости.
Также и переоборудование конструктивной формы прежде всего согласно фиг.5 между пассивной системой, полуактивной системой или системой с активной компенсацией колебаний в поперечной плоскости возможно в любое время впоследствии, при этом вместо исполнительного органа 11 либо предусматривается только пружинный элемент (пассивная система), либо используется амортизатор или газонаполненный амортизатор (полуактивная система), либо предусматривается, как описано выше, активно управляемый, например гидравлический, исполнительный орган 11 (активная компенсация колебаний в поперечной плоскости).
В итоге становится понятно, что благодаря изобретению создается устройство подвески для пружинящей подвески материального тела, например кабины грузового автомобиля, с помощью которого при экономии конструктивного пространства, а также надежно в эксплуатации определяется желательная, прежде всего вертикальная, степень свободы движения кабины. В то же время активно с помощью исполнительного органа пресекаются нежелательные колебательные движения в поперечной плоскости или перекосы материального тела или же кабины, в том числе и в случае возмущений к таким колебаниям со стороны основания или же шасси.
Таким образом, изобретение делает возможным конструктивно простое активное подавление колебаний в поперечной плоскости в смысле улучшения комфорта для водителя, прежде всего при использовании изобретения в области систем кабины грузового автомобиля.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
Изобретение относится к устройству подвески для пружинящей подвески материального тела относительно основания и шасси автомобиля. Устройство подвески имеет расположенное между материальным телом и основанием пружинно-амортизационное устройство, для амортизации ударов или же колебаний и содержит структуру систем шарнирных рычагов по меньшей мере с одной системой (A, B, C, D, E) шарнирных рычагов для уменьшения степеней свободы движения. По меньшей мере одна из точек (A, B, C, D, E, G) шарнирного соединения по меньшей мере одной системы (A, B, C, D, E) шарнирных рычагов относительно подвижно соединена с материальным телом или же основанием. При этом относительное положение между точкой шарнирного соединения и материальным телом или же основанием является регулируемым посредством по меньшей мере одного воздействующего по существу линейно исполнительного органа. Достигается надежность в эксплуатации, а также уменьшение или же пресечение нежелательных движений кабины; одновременно могут быть пресечены или же компенсированы нежелательные колебательные движения. 13 з.п. ф-лы, 6 ил.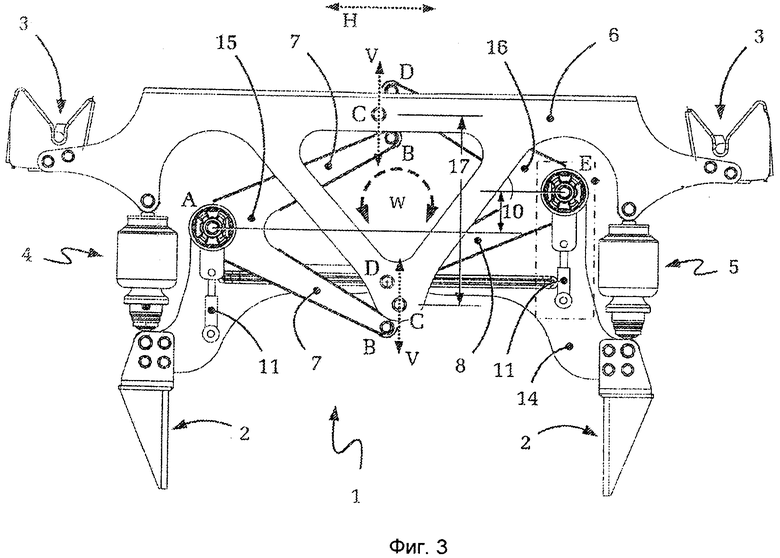
1. Устройство (1) подвески для пружинящей подвески материального тела, прежде всего кабины грузового автомобиля, относительно основания (2), прежде всего относительно шасси автомобиля,
при этом устройство (1) подвески имеет расположенное между материальным телом и основанием (2) пружинно-амортизационное устройство (4, 5) для амортизации ударов или же колебаний,
при этом устройство (1) подвески содержит структуру систем шарнирных рычагов по меньшей мере с одной относительно подвижно соединяющей материальное тело и основание (2) системой (A, B, C, D, E) шарнирных рычагов для уменьшения степеней свободы движения материального тела относительно основания (2),
отличающееся тем, что
по меньшей мере одна из точек (A, B, C, D, E, G) шарнирного соединения по меньшей мере одной системы (A, B, C, D, E) шарнирных рычагов относительно подвижно соединена с материальным телом или же основанием (2),
при этом относительное положение между точкой шарнирного соединения и материальным телом или же основанием (2) является регулируемым посредством по меньшей мере одного воздействующего по существу линейно исполнительного органа (11).
2. Устройство подвески по п.1, отличающееся тем, что исполнительный орган (11) посредством расположенного по существу перпендикулярно направлению воздействия исполнительного органа плеча (12) рычага присоединен по меньшей мере к одной точке (A, B, C, D, E, G) шарнирного соединения системы шарнирных рычагов.
3. Устройство подвески по п.2, отличающееся тем, что направление воздействия по меньшей мере одного исполнительного органа (12) проходит по существу перпендикулярно направлению (V) прямолинейной направляющей по меньшей мере одной системы (A, B, C, D, E) шарнирных рычагов.
4. Устройство подвески по одному из пп.1-3, отличающееся тем, что по меньшей мере одна точка (A, E) шарнирного соединения по меньшей мере одной системы (A, B, C, D, E) шарнирных рычагов упруго соединена с материальным телом или же основанием (2), при этом по меньшей мере один исполнительный орган (11) расположен между по меньшей мере одной точкой (A, E) шарнирного соединения и материальным телом или же основанием (2).
5. Устройство подвески по п.4, отличающееся тем, что упругое соединение между точкой (A, E) шарнирного соединения соединенной с исполнительным органом (11) системы (A, B, C, D, E) шарнирных рычагов и материальным телом или же основанием (2) имеет разные коэффициенты жесткости пружины по меньшей мере в двух разных направлениях (H, V) в пространстве.
6. Устройство подвески по одному из пп.1-3 или п.5, отличающееся тем, что структура систем шарнирных рычагов содержит две системы (A, B, C, D, E) шарнирных рычагов, при этом направления (V) прямолинейной направляющей по меньшей мере двух систем (A, B, C, D, E) шарнирных рычагов совпадают, при этом системы (A, B, C, D, E) шарнирных рычагов расположены на расстоянии друг от друга вдоль общего направления (V) прямолинейной направляющей и при этом плоскости движения по меньшей мере двух систем (A, B, C, D, E) шарнирных рычагов проходят параллельно друг другу.
7. Устройство подвески по п.6, отличающееся тем, что соотнесенные с поперечными шатунами (7, 8) обеих систем (A, B, C, D, E) шарнирных рычагов внешние точки (A, E) шарнирного соединения расположены соответственно попарно на одной общей для обеих систем (A, B, C, D, E) шарнирных рычагов поворотной оси (A, E) и выполнены соответственно попарно монолитными в виде по существу V-образного комбинированного шатуна (15, 16).
8. Устройство подвески по п.6, отличающееся тем, что две точки (A, E) шарнирного соединения структуры (A, B, C, D, E) систем шарнирных рычагов посредством двух исполнительных органов (11) относительно подвижно соединены с материальным телом или же основанием (2).
9. Устройство подвески по п.7, отличающееся тем, что две точки (А, Е) шарнирного соединения структуры (A, B, C, D, E) систем шарнирных рычагов посредством двух исполнительных органов (11) относительно подвижно соединены с материальным телом или же основанием (2).
10. Устройство подвески по п.6, отличающееся тем, что точка (С) шарнирного соединения по меньшей мере одного исполнительного механизма (11) на структуре (A, B, C, D, E) систем шарнирных рычагов соединена с точкой (C) поворота одного из шарнирных рычагов (9) структуры (A, B, C, D, E) систем шарнирных рычагов, при этом направление (H) воздействия по меньшей мере одного исполнительного органа (11) проходит по существу перпендикулярно направлению (V) прямолинейной направляющей структуры (A, B, C, D, E) систем шарнирных рычагов.
11. Устройство подвески по п.7, отличающееся тем, что точка (С) шарнирного соединения по меньшей мере одного исполнительного механизма (11) на структуре (A, B, C, D, E) систем шарнирных рычагов соединена с точкой (C) поворота одного из шарнирных рычагов (9) структуры (A, B, C, D, E) систем шарнирных рычагов, при этом направление (H) воздействия по меньшей мере одного исполнительного органа (11) проходит по существу перпендикулярно направлению (V) прямолинейной направляющей структуры (A, B, C, D, E) систем шарнирных рычагов.
12. Устройство подвески по п.10, отличающееся тем, что имеется ровно один исполнительный орган (11), при этом точка (C) шарнирного соединения исполнительного органа (11) на структуре (A, B, C, D, E) систем шарнирных рычагов соединена с точкой (С) поворота того шарнирного рычага (9) структуры (A, B, C, D, E) систем шарнирных рычагов, который имеет большее расстояние до материального тела.
13. Устройство подвески по одному из пп.1-3, отличающееся тем, что параллельно исполнительному органу (11) подключен пружинный элемент (19).
14. Устройство подвески по одному из пп.1-3, отличающееся тем, что по меньшей мере один исполнительный орган (11) выполнен в качестве пассивного, полуактивного или активного исполнительного органа.
| DE 102005043998 A1, 05.04.2007 | |||
| US 2005274557 A1, 15.12.2005 | |||
| Подвеска кабины транспортного средства | 1970 |
|
SU503495A3 |
| КОМБИНИРОВАННАЯ ПОДВЕСКА АВТОМОБИЛЯ | 1998 |
|
RU2149106C1 |

