Изобретения относятся к радиолокационной технике и могут быть использованы для определения длины перемещающихся объектов.
Известна РЛС измерения начальной скорости снаряда (РЛС) [патент 2367975, RU, G01S 13/58], содержащая приемно-передающую антенну, вход которой, работающий на передачу, подключен к высокомощному выходу передатчика непрерывного сигнала с частотной модуляцией по одностороннему пилообразному линейно спадающему закону (НЛЧМ сигнал), а выход, работающий на прием, подключен к первому входу смесителя, второй вход которого подключен к маломощному выходу передатчика, а выход, через фильтр разностных частот, обнаружитель сигналов узкополосного спектра частот, измеритель интервала времени и вычислитель начальной скорости снаряда к выходной шине. При этом начальную скорость снаряда вычисляют как Vнач=2До/tизм2, где
tизм2 - интервал времени пролета удаляющимся от РЛС снарядом известного базового расстояния 2До.
Данную РЛС можно использовать в качестве измерителя средней скорости (Vср=4До/t2) объекта на интервале известного базового расстояния 4До, где
t2 - формируемый на РЛС интервал времени между моментами возникновения и обнаружения на ней сигналов частотой NFдо=N2Vofн/C и (N+4)Fдо, за который объект пролетает интервал расстояния S2
от (1-δ)(Дo/Vo)(Vi+NVo)до(1+δ)(До/Vo)[Vi+(N+4)Vo], где
fн - средняя частота излучаемого РЛС НЛЧМ сигнала, выбираемая из условия До/Vo=fн/Fмfд;
fд - девиация частоты НЛЧМ сигнала;
Fм - частота модуляции НЛЧМ сигнала;
Vo - минимально возможная величина радиальной скорости цели;
До - выбираемое базовое расстояние;
С и Vi - соответственно скорость света и скорость цели;
δ - коэффициент, определяющий длину известных интервалов S1=S3 расстояния, при пролете которых происходит на РЛС обнаружение цели;
N - положительное число, определяющее расстояние между РЛС и началом обнаружения цели на интервале расстояния S2,
но не для измерения длины перемещающегося объекта, например ракеты на траектории ее полета.
Целью изобретения является расширение ассортимента устройств измерения длины перемещающихся объектов.
Поставленная цель достигается за счет создания измерителя длины перемещающегося объекта на базе РЛС измерения начальной скорости снаряда.
Измерение длины перемещающегося объекта заключается в формировании интервала времени t2 между моментами возникновения и обнаружения на РЛС измерения длины перемещающегося объекта сигналов частотой NFдо=N2Vofн/C и (N+4)Fдо за который объект пролетает интервал расстояния S2
от (1-δ)(До/Vo)(Vi+NVo)до(1+δ)(Дo/Vo)[Vi+(N+4)Vo], где
fн - средняя частота излучаемого РЛС непрерывного сигнала с частотной модуляцией по одностороннему пилообразному линейно спадающему закону (НЛЧМ сигнал), выбираемая из условия До/Vo=fн/FмFд;
fд и Fм - соответственно девиация частоты и частота модуляции НЛЧМ сигнала;
Vo - минимально возможная величина радиальной скорости цели;
До - выбираемое базовое расстояние;
С и Vi - соответственно скорость света и скорость цели;
δ - коэффициент, определяющий длину известного интервала S1 расстояния, на котором происходит обнаружение объекта;
N - положительное число, определяющее расстояние между РЛС и началом обнаружения цели на интервале расстояния S2
и формировании интервала времени t1, в течении которого объект пролетает интервал расстояния S1
от(1-δ)(Дo/Vo)(Vi+NVo)до(1+δ)(Дo/Vo)(Vi+NVo),
во время обнаружения на РЛС сигнала частотой NFдо±ΔFдо, где
±ΔFдо - диапазон узкополосного спектра частот сигналов обнаруживаемых на РЛС, и длину объекта вычисляют, используя выражение L=4Дot1/t2.
Устройства измерения длины перемещающихся объектов содержит: приемнопередающую антенну 2, вход которой, работающий на передачу, подключен к высокомощному выходу передатчика 1 непрерывного сигнала с частотной модуляцией по одностороннему пилообразному линейно спадающему или возрастающему законам (НЛЧМ сигнал), а выход, работающий на прием, подключен к первому входу смесителя 3, второй вход которого подключен к маломощному выходу передатчика 1 НЛЧМ сигнала, а выход, через фильтр 4 разностных частот, к входу обнаружителя 5 сигнала узкополосного спектра частот, выход которого подключен к входам регистра 6 сдвига и первого элемента 9 И, первый выход регистра сдвига подключен к входу второго элемента 8 И и второму входу первого элемента 9 И, выход генератора 7 счетных импульсов подключен к второму входу второго и третьему входу первого элементов 8 и 9 И, выходы первого и второго элементов 9 и 8 И подключены к входам счета соответственно первого и второго счетчиков 11 и 10 импульсов, выходы первого счетчика 11 импульсов подключены к входам схемы 14 умножения, вторые входы которой подключены к шинам 13 постоянного цифрового числа, а выходы к входам схемы 15 деления, выходы второго счетчика 10 импульсов подключены к вторым входам схемы 15 деления, выходы которой, через блок 16 памяти, подключены к выходным шинам 17, второй вход регистра 6 сдвига через элемент 12 задержки подключен к входу записи блока 16 памяти и входам сброса первого и второго счетчиков 11 и 10 импульсов и регистра 6 сдвига.
Рассмотрим, в том числе на примерах, работу устройств измерения длины перемещающихся объектов (фиг.1).
Пусть устройства в пространство излучают и принимают отраженные от неподвижных и перемещающихся со скоростью, например, V2000=2000 м/с объектов НЛЧМ сигналы с, например, параметрами: fн=100 ГГц, Fм=50кГц и fд=50МГц, выбранными при базовом расстоянии Do=6 м и минимально возможной скорости цели Vo=150 м/с, а также при опорном сигнале частотой 21Fдо=21(2Vofн)/C=2100 кГц, поступающим на НЧ смеситель обнаружителя 5 сигнала узкополосного спектра.
В результате смешивания в смесителе 3 отраженного и излученного сигналов на его выходе будут формироваться разностные сигналы частотой:
Fp193,97=[(2Д193,97)FмFд/С]-(2V2000fн/С)=1899,5 кГц - разностный сигнал от цели находящейся на удалении в Д193,97=193,97 м от антенны РЛС, в момент пролета целью точки пространства соответствующей дальности, вычисляемой по формуле (До/Vo)(Vi+NVo)-S1/2, где N=19 и, например, S1=6 см;
Fp194,03=[(2Д194,03)Fмfд/С]-(2V2000fн/С)=1900,5 кГц - разностный сигнал от цели, находящейся на удалении в Д194,03=194,03 м от антенны РЛС, в момент пролета целью точки пространства соответствующей дальности, вычисляемой по формуле (До/Vo)(Vi+NVo)+S1/2;
Fp217,97=[(2Д217,97)Fмfд/С]-(2V2000fн/С)=2299,5 кГц - разностный сигнал от цели, находящейся на удалении в Д217,97=217,97 м от антенны РЛС, в момент пролета целью точки пространства соответствующей дальности, вычисляемой по формуле (Дo/Vo)[Vi+(N+4)Vo)]-S2/2 и, например, S2=6 см;
Fp218,03=[(2Д218,03)Fмfд/С]-(2V2000fн/С)=2300,5 кГц - разностный сигнал от цели находящейся на удалении в Д218,03=218,03 м от антенны РЛС, в момент пролета целью точки пространства соответствующей дальности вычисляемой по формуле (Дo/Vo)[Vi+(N+4)Vo)]+S1/2.
Очевидно, что если 4До намного больше S1 и S2, то цель интервал расстояния
Д218,03-Д193,97=(218,03-193,97)м = 24,06 м = 4До
пролетит со средней скоростью
Vcp=4До/t2,
где t2 интервал времени между моментами возникновения и обнаружения на РЛС сигналов с частотами Fp193,97 и Fр218,03 и между моментами смены потенциалов на первом и втором выходах регистра 6 сдвига.
Тогда цель интервал S1 пространства, находящийся на расстоянии от антенны РЛС {(Дo/Vo)[Vi+(N+4)Vo)]+(До/Vo)(Vi+NVo)}/2=(Дo/Vo)[Vi+(N+2)Vo)]=206 м, пролетит со скоростью Vcp=V1=4До/t2. При этом на выходе обнаружителя 5 сигнала узкополосного спектра частот будет сформирован импульс длительностью
t1=L/Vi=Lt2/4Дo,
где L=4Доt1/t2 - длина цели, величина которой всегда постоянна и может быть вычислена следующим образом.
За время длительности импульса, соответствующего по длительности интервалу времени t1, на выходе счетчика 11 импульсов формируют цифровое число, соответствующее величине t1, так как на вход счетчика 11 импульсов, через элемент И9, в течение времени t1, будут поступать счетные импульсы с генератора 7 счетных импульсов.
За время, соответствующее по длительности интервалу времени t2, на выходе счетчика 10 импульсов формируют цифровое число, соответствующее величине t2, так как на вход счетчика 10 импульсов, через элемент И8, в течение времени t2, будут поступать счетные импульсы с генератора 7 счетных импульсов.
Схема, образованная схемой 14 умножения, схемой 15 деления и блоком 16 памяти представляет собой вычислитель выражения
L=4Доt1/t2,
при подаче на нее цифровых чисел с выходов счетчиков 10 и 11 импульсов, а на вторые входы схемы 14 умножения с шин 13 постоянного цифрового числа, соответствующего интервалу расстояния 4До.
Так, например, при выше принятых параметрах НЛЧМ сигнала и значениях других величин, допустим, получим, интервалы времени t2=0,012 с и t1=0,0003 с. Тогда длина объекта определится цифровым числом, сформированным на выходах схемы 15 деления и блока 16 памяти, соответствующая величине
L=4Дot1/t2=4×6м×0,0003с/0,012с=0,6 м/с,
Следует отметить, что в блок 16 памяти цифровые числа с выхода схемы 15 деления будут переписываться под воздействием потенциала с выхода элемента 12 задержки и которым счетчики 10 и 11 импульсов и регистра 6 сдвига будут устанавливаться в исходное состояние.
Изобретения относятся к радиолокационной технике. Достигаемый технический результат - расширение ассортимента устройств измерения длинны объектов.
Измеренная длина перемещающегося объекта определяется выражением
L=4Доt1/t2, где
t2 - интервал времени между моментами возникновения и обнаружения на радиолокационной станции (РЛС) сигналов частотой NFдо=N2Vofн/C и (N+4)Fдо, за который объект пролетает интервал расстояния S2
от (1-δ)(Дo/Vo)(Vi+NVo) до (1+δ)(Дo/Vo)[Vi+(N+4)Vo], где
fн - средняя частота излучаемого РЛС непрерывного сигнала с частотной модуляцией по одностороннему пилообразному линейно спадающему закону (НЛЧМ сигнал), выбираемая из условия До/Vo=fн/Fмfд;
fд и Fм - соответственно девиация частоты и частота модуляции НЛЧМ сигнала;
Vo - минимально возможная величина радиальной скорости цели;
До - выбираемое базовое расстояние;
С и Vi - соответственно скорость света и скорость цели;
δ - коэффициент, определяющий длину известного интервала S1 расстояния, на котором происходит обнаружение объекта;
N - положительное число, определяющее расстояние между РЛС и началом обнаружения цели на интервале расстояния S2;
t1 - интервал времени, в течение которого объект пролетает интервал расстояния S1
от (1-δ)(До/Vo)(Vi+NVo) до (1+δ)(Дo/Vo)(Vi+NVo),
во время обнаружения на РЛС сигнала частотой NFдо±ΔFдо, где
±ΔFДo - диапазон узкополосного спектра частот сигналов, обнаруживаемых на РЛС. Устройства измерения длины перемещающегося объекта содержат антенну, передатчик непрерывного линейно частотно-модулированного (НЛЧМ) сигнала, смеситель, фильтр разностных частот, обнаружитель сигнала узкополосного спектра частот, регистр сдвига, два элементав И, два счетчика импульсов, элемент задержки, генератор счетных импульсов, схему умножения и схему деления, блок памяти и шины постоянного цифрового числа. 2 н.п. ф-лы, 1 ил.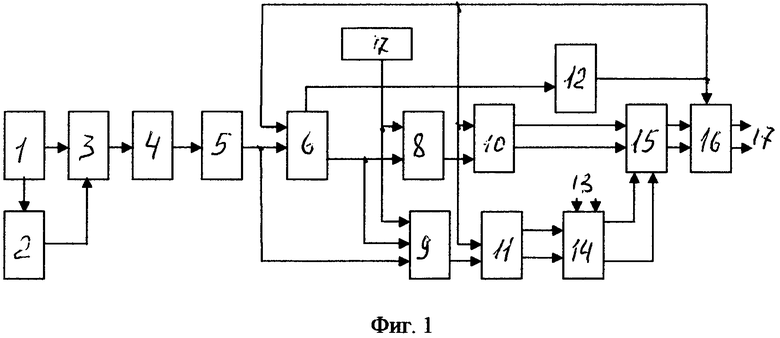
1. Способ измерения длины перемещающегося объекта, заключающийся в формировании интервала времени t2 между моментами возникновения и обнаружения на радиолокационной станции измерения длины перемещающегося объекта (РЛС) сигналов частотой NFдо=N2Vofн/C и (N+4)Fдo, за который объект пролетает интервал расстояния S2
от (1-δ)(Дo/Vo)(Vi+NVo) до (1+δ)(Дo/Vo)[Vi+(N+4)Vo], где
fн - средняя частота излучаемого РЛС непрерывного сигнала с частотной модуляцией по одностороннему пилообразному линейно спадающему закону (НЛЧМ сигнал), выбираемая из условия До/Vo=fн/Fмfд;
fд и Fм - соответственно девиация частоты и частота модуляции НЛЧМ сигнала;
Vo - минимально возможная величина радиальной скорости цели;
До - выбираемое базовое расстояние;
С и Vi - соответственно скорость света и скорость цели;
δ - коэффициент, определяющий длину известного интервала S1 расстояния, на котором происходит обнаружение объекта;
N - положительное число, определяющее расстояние между РЛС и началом обнаружения цели на интервале расстояния S2;
отличающийся тем, что на РЛС формируют дополнительно интервал времени t1, в течении которого объект пролетает интервал расстояния S1
от (1-δ)(До/Vo)(Vi+NVo) до (1+δ)(Дo/Vo)(Vi+NVo),
во время обнаружения на РЛС сигнала частотой NFдо±ΔFдо, где
±ΔFдо - диапазон узкополосного спектра частот сигналов обнаруживаемых на РЛС и длину объекта вычисляют, используя выражение L=4Доt1/t2.
2. Устройство измерения длины перемещающегося объекта, содержащее приемно-передающую антенну, вход которой работающий на передачу, подключен к высокомощному выходу передатчика непрерывного сигнала с частотной модуляцией по одностороннему пилообразному линейно спадающему закону (НЛЧМ сигнал), а выход, работающий на прием, подключен к первому входу смесителя, второй вход которого подключен к маломощному выходу передатчика НЛЧМ сигнала, а выход, через фильтр разностных частот, к входу обнаружителя сигнала узкополосного спектра частот, отличающееся тем, что выход обнаружителя сигнала узкополосного спектра частот подключен к входам регистра сдвига и первого элемента И, первый выход регистра сдвига подключен к входу второго элемента И и второму входу первого элемента И, выход генератора счетных импульсов подключен к второму входу второго и третьему входу первого элементов И, выходы первого и второго элементов И подключены к входам счета соответственно первого и второго счетчиков импульсов, выходы первого счетчика импульсов подключены к входам схемы умножения, вторые входы которой подключены к шинам постоянного цифрового числа, а выходы к входам схемы деления, выходы второго счетчика импульсов подключены к вторым входам схемы деления, выходы которой, через блок памяти, подключены к выходным шинам, второй вход регистра сдвига через элемент задержки подключен к входу записи блока памяти и входам сброса первого и второго счетчиков и регистра сдвига.
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТОВ ПРОЛЕТА СНАРЯДОМ НАЧАЛА И КОНЦА ИЗВЕСТНОГО ИНТЕРВАЛА РАССТОЯНИЯ, РЛС ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2007 |
|
RU2367975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА, ДВИЖУЩЕГОСЯ БЫСТРЕЕ, ЧЕМ ИСПУСКАЕМЫЕ ИМ ВОЛНЫ | 1994 |
|
RU2107306C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| Устройство для дискретного измерения длины движущихся объектов | 1983 |
|
SU1146541A1 |
| JP 2003279309 A, 02.10.2003 | |||
| JP 2012052838 A, 15.03.2012 | |||
| JP 2003172608 A, 20.06.2003 | |||
| US 6943727 B2, 13.09.2005 | |||

