Предлагаемое изобретение относится к технике обследования, например, минных полей и соответственно может быть использовано для поиска, обнаружения и распознавания мин и, в том числе, например, противотанковых мин и фугасов, закрытых слоем грунта.
Известен способ получения информации о местности, основанный на покадровой съемке подстилающей поверхности с помощью установленной на летательном аппарате (ЛА) фотокамеры [1].
Данный способ обеспечивает возможность получения информации о подстилающей поверхности, но не решает вопроса выявления малоразмерных объектов, например мин.
Наиболее близким аналогом-прототипом является способ получения информации об объектах на местности, основанный на аэросъемке подстилающей поверхности с помощью установленной на носителе фото и телеаппаратуры и последующей обработке полученных данных [2].
Известный способ дает возможность получения с высоким разрешением информации о подстилающей поверхности, однако при его использовании не обеспечена возможность выявления заглубленных объектов.
Известно устройство синтеза радиолокационного изображения, содержащее формирователь опорной функции в виде постоянного запоминающего устройства (ПЗУ), комплексный умножитель, два блока быстрого преобразования Фурье, амплитудный детектор, а также формирователь двумерного матричного сигнала и накопитель [3].
В известном устройстве проведено комплексирование вычислительной среды, инвариантной к траектории и параметрам движения, и обеспечена возможность некогерентного синтеза радиолокационного изображения зондируемой области. Однако это устройство не обеспечивает возможности проведения поиска, а также обнаружения и распознавания малоразмерных объектов.
Наиболее близким аналогом-прототипом является система подповерхностного зондирования, основанная на принципе многочастотного зондирования консервативных сред (строительных конструкций, грунтов и т.п.) и содержащая радиолокационный датчик, подключенный к вычислительному устройству, соединенному с устройством индикации [4].
Эта система обеспечивает возможность сканирования и соответственно зондирования поверхности и позволяет вести обнаружение и идентификацию заглубленных в грунт на (1-10) см пластиковых и металлических противотанковых и противопехотных мин, однако возможность проведения с ее помощью дистанционного поиска малоразмерных объектов в настоящее время конструктивно не проработана.
Известен способ дистанционного выявления малоразмерных объектов, например, мин с помощью робототехнических комплексов, использующих при обследовании минных полей эффект ядерного магнитного резонанса с последующей обработкой полученных спектров [5].
Данный способ обеспечивает возможность получения требуемой для обнаружения и распознавания мин информации с вероятностью, достаточно близкой к аналогичной характеристике контактного миноискателя, однако не решает вопроса оперативной обработки такой информации в больших объемах, а, кроме того, не предназначен для дистанционного поиска малоразмерных объектов, например, тех же мин.
Наиболее близким аналогом-прототипом является способ дистанционного выявления малоразмерных объектов, например, мин, с воздушных носителей, например вертолетов, основанный на получении с помощью соответствующих датчиков аэрофотоснимков исследуемых участков подстилающей поверхности, в том числе в инфракрасном или в радиодиапазоне, и последующей обработке и дешифровке полученных данных [6].
Известный способ обеспечивает возможность получения требуемой информации о маломерных объектах и ее оперативного анализа, однако его использование не обеспечивает возможность обнаружения, например мин, заглубленных в грунт.
Задача изобретения состоит в разработке способа, обеспечивающего возможность повышения разрешения при радиолокационном зондировании подстилающей поверхности, системы для осуществления способа, а также способа дистанционного выявления, например с борта летательного аппарата, путем поиска, обнаружения и распознавания этой системой установленных как на подстилающей поверхности, так и заглубленных малоразмерных объектов, например разного типа мин.
Сущность изобретения состоит в том, что в способе повышения радиолокационного разрешения, включающем получение отраженных сигналов при соответствующем обследовании поверхности, эти сигналы получают с помощью когерентного радиолокационного зондирования участков поверхности в определяемых шириной диаграммы направленности антенны секторах наблюдения (10-50)° под ракурсами обследования в диапазоне ±75°, полученные сигналы запоминают в виде соответствующих радиоизображений, после чего для каждого ракурса обследования формируют радиоизображения, соответствующие совокупности сигналов радиоизображений, получаемых по сечениям, параллельным направлению соответствующего ракурса обследования, в проекциях на плоскость, перпендикулярную этим направлениям, а затем производят Фурье-преобразование сформированных проекций радиоизображений, по совокупности которых для каждого участка с помощью метода реконструктивной вычислительной томографии, например преобразования Радона, формируют соответствующую суммарную квазиголограмму с последующим восстановлением по ней с помощью двухмерного обратного Фурье-преобразования радиоизображения соответствующих участков с увеличенным разрешением.
Сущность изобретения состоит в том, что в систему дистанционного выявления малоразмерных объектов, включающую радиолокационный датчик, связанный с вычислительным устройством, своим выходом подключенным к индикатору, введены блок согласования, блок формирования радиолокационного изображения, классификатор, два блока памяти, блок определения координат, блок синхронизации, печатающее и радиопередающее и радиоприемное устройства, а также дополнительные индикатор и вычислительное устройство, причем радиолокационный датчик первым выходом подключен к первому входу блока согласования, своим выходом соединенного с первым входом блока формирования радиолокационного изображения, подключенного к первому входу первого блока памяти, выходом соединенного с первым входом радиопередающего устройства, вторым (управляющим) входом подключенного к первому выходу вычислительного устройства, вторым выходом соединенного со вторым (управляющим) входом первого блока памяти, третьим выходом соединенного с управляющим входом радиолокационного датчика, а четвертым выходом подключенного ко входу блока синхронизации, своими первым и вторым выходами соединенного со вторыми (синхронизирующими) входами соответственно блока согласования и блока формирования радиолокационного изображения, а группой выходов подключенного к группе соответствующих входов радиолокационного датчика, вторым выходом соединенного с третьим входом блока согласования, при этом вычислительное устройство входом-выходом соединено со входом-выходом первого блока памяти, а пятым и шестым выходами подключено соответственно к первым входам индикатора и блока определения координат, своими первым и вторым выходами соответственно соединенного с первым входом вычислительного устройства и вторым входом индикатора, а радиовходом связанного с радиовходом системы, причем радиопередающее устройство своим радиовыходом связанно с радиовходом радиоприемного устройства, выходом подключенного к первому входу второго блока памяти, своим выходом подключенного к первому входу классификатора, выходом соединенного с первым входом дополнительного вычислительного устройства, своими первым, вторым и третьим выходами подключенного соответственно ко вторым входам радиоприемного устройства, второго блока памяти и классификатора, четвертым и пятым выходами соединенного с первыми входами второго индикатора и печатающего устройства соответственно, а входом-выходом соединенного с входом-выходом второго блока памяти, при этом входы вычислительного и дополнительного вычислительного устройств подключены соответственно к первому и второму входам системы, выход печатающего устройства связан с выходом системы, оптические выходы индикаторов связаны с соответствующими оптическими выходами системы, а группа радиовходов-выходов радиолокационного датчика связана с соответствующей группой входов-выходов системы.
При этом радиолокационный датчик содержит две фазированные антенные решетки, каждая из которых состоит из М независимо подключенных приемо-передающих модулей, где, например, М=1, ..., 12, сумматор, два коммутатора, генератор, модулятор и блок формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча для каждого из приемо-передающих модулей, причем приемо-передающие модули первыми электрическими входами соединены с соответствующими выходами первого коммутатора, первым входом подключенного к первому выходу генератора, первым (управляющим) входом соединенного с входом радиолокационного датчика, а вторым входом подключенного к выходу модулятора, входом соединенного с первым входом группы входов радиолокационного датчика, при этом второй вход группы входов радиолокационного датчика подключен ко входу блока формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча для каждого из приемо-передающих модулей решеток, своими первым и вторым выходами соединенного соответственно со вторым входом первого коммутатора и первым входом второго коммутатора, своим вторым входом подключенного к третьему входу группы входов радиолокационного датчика, а соответствующими N=2M выходами соединенного со вторыми электрическими входами соответствующих приемо-передающих модулей, причем электрические выходы приемо-передающих модулей подключены к соответствующим входам сумматора, выходом соединенного с первым (электрическим) выходом радиолокационного датчика, второй выход генератора подключен ко второму выходу радиолокационного датчика, радио-входы-выходы которого связаны с соответствующими радио-входами-выходами приемо-передающих модулей.
Сущность изобретения состоит в том, что в способе дистанционного выявления системой малоразмерных объектов, включающем их поиск, обнаружение и распознавание и основанном на обследовании с борта летательного аппарата (ЛА) подстилающей поверхности путем ее радиолокационного зондирования и обработке полученных отраженных сигналов, обследование подстилающей поверхности в зоне предполагаемого нахождения малоразмерных объектов, например в предполагаемом минном поле, производят при облете ЛА этого поля путем его сканирования с одновременным радиолокационным зондированием, например, в дециметровом диапазоне радиоволн с помощью сформированной на бортовой радиолокационной станции (РЛС) или установленных на борту ЛА радиолокационных датчиков (РЛД) синтезированной апертуры, а также путем пошагового дискретного поворота луча антенны на заданные углы в каждом предварительно выбранном элементарном интервале обследования и определением координат мест отражения соответствующих сигналов при каждом шаге поворота луча антенны РЛС в этих интервалах обследования, причем полученные при зондировании отраженные сигналы и координаты соответствующих участков подстилающей поверхности запоминают, а затем формируют соответствующие этим отраженным сигналам сигналы радиоизображения участков и соответствующих им координат обследованного поля, после чего, например, по величине интенсивности отраженных сигналов и плотности их расположения на этих участках сигналов соответствующей интенсивности вначале определяют наличие малоразмерных объектов и координаты мест их нахождения, а потом по соответствующим отраженным сигналам производят формирование признаков, характеризующих находящиеся в этих местах объекты, и сопоставляют эти признаки с соответствующими эталонами, причем обследование проводят в «привязке», например, к характерным точкам подстилающей поверхности и/или к специальным маякам, например, к радиомаякам и/или оптическим отражателям, которые устанавливают в зоне предполагаемого нахождения малоразмерных объектов.
При этом зондирование подстилающей поверхности осуществляют в диапазоне, например, дециметровых волн, а зондирующие сигналы формируют в виде повторяющейся во времени ограниченной последовательности когерентных импульсов на различных несущих частотах.
Кроме того, синтезирование апертуры антенны проводят в течение времени длительности импульсов, имеющих одинаковые несущие частоты на каждом элементарном интервале обследования.
При этом элементарный интервал обследования выбирают равным (0,5-2,0) сек, а отраженные сигналы запоминают в виде массива данных, представляющего собой, например, n-мерное (где, например, n=4) представление величин этих отраженных сигналов, а также сигналов, соответствующих координатам мест отражения, и углов сканирования соответствующих мест отражения на исследованных участках подстилающей поверхности.
При этом величины интенсивности сигналов при обнаружении находящихся на этой поверхности и/или заглубленных малоразмерных объектов получают путем суммирования величин сигналов, полученных при каждом пролете ЛА, но отраженных от одних и тех же точек поверхности, с последующим сравнением этих суммарных сигналов с заданным пороговым сигналом и соответствующим выделением с отнесением к координатам на этой поверхности результирующих сигналов и их совокупностей, а используемые для распознавания признаки с помощью, например, преобразования Радона получают в виде квазиголограмм радиоизображения соответствующего малоразмерного объекта при соответствующей обработке запомненных совокупностей сигналов, отраженных от соответствующих мест нахождения этих объектов.
При этом выделение признаков, сопоставление их с соответствующими эталонами и последующую классификацию объектов производят с помощью алгоритмов, работающих на принципах обработки с помощью нейронных сетей, например по алгоритму Кохонена.
Кроме того, обследование предполагаемого минного поля производят путем его облета со сканированием и при соответствующем зондировании каждого участка обследуемой подстилающей поверхности в трех и более ракурсах, а после обнаружения мест нахождения малоразмерных объектов вокруг этих мест осуществляют облет с соответствующим сканированием и зондированием этих участков подстилающей поверхности.
При этом величину шага дискретного поворота радиолокационного луча антенны РЛС выбирают соответствующей ширине этого луча в горизонтальной плоскости, а заданный угол поворота выбирают соответствующим углу охвата участка сектором отклонения луча антенны РЛС ЛА.
Кроме того, радиомаяки и/или оптические отражатели устанавливают путем, например, их сбрасывания с борта ЛА при его полете и эти маяки устанавливают на границах минного поля, например, по его периметру, причем расстояние между установленными на периметре маяками выбирают соответствующим ширине полосы обследования при разовом пролете ЛА.
Кроме того, маяки устанавливают по периметру минного поля и на участках подстилающей поверхности, на которых обнаружены малоразмерные объекты.
Кроме того, на участках подстилающей поверхности, на которых обнаружены малоразмерные объекты, устанавливают оптические средства разметки.
Кроме того, при обследовании минного поля его облет осуществляют по маршруту от каждого установленного, например, по периметру данного поля маяка к каждому другому маяку, причем заранее определяют координаты этих маяков, например, в земной системе координат, при этом в качестве исходной (начальной) точки выбирают местонахождение, например, установленного на периметре радиомаяка, а эти маяки устанавливают на расстоянии, соответствующем, например, (0,3-0,9) ширины обзора при пролете.
При этом сигналы радиомаяков, установленных на границах минного поля и на участках подстилающей поверхности, на которых обнаружены малоразмерные объекты, выбраны с отличающимися по частоте излучаемыми сигналами.
Предложенные способ повышения разрешения радиолокационного зондирования, система для его осуществления и способ дистанционного выявления системой малоразмерных объектов обеспечивают возможность проведения бесконтактного для соответствующего оператора, например минера, поиска с высокой вероятностью обнаружения и распознавания мин, и в том числе, заглубленных в грунт и соответственно замаскированных.
Дело в том, что при решении задачи обнаружения и распознавания малоразмерных целей, в том числе разного типа мин, определяющим фактором является соотношение мощностей отражения радиолокационного сигнала от объекта и непосредственно от окружающей его среды (отношение сигнал/фон).
При этом мощность фона в элементе разрешения зависит от удельной эффективной поверхности рассеяния (ЭПР) фона и линейного разрешения радиолокационного датчика (РЛД) и определяется соотношением [7]:
Pф=kσфδρδD,
где k - коэффициент, учитывающий затухание сигнала при распространении в среде, σф - удельная ЭПР фона, δρ и δD - линейное разрешение по поперечной и продольной координатам участка местности, облучаемого при обнаружении объекта, а мощность сигнала, отраженного от объекта, определяют как
Рc=kσo,
где σо - значение ЭПР малоразмерного объекта.
Особенности, связанные с подповерхностным расположением объекта (мины), существенно усложняют структуру формирования сигнала Рс, поэтому задачу его получения обычно решают экспериментально. Так известно [8], что при обнаружении на площадке размером 1 м × 1 м и использовании радиоизлучения РЛС в дециметровом диапазоне радиоволн на частоте 1 ГГц (0.3 м) для заглубленной металлической противотанковой мины типа М-20 имеет место отношение Рс/Рф ˜ 2 ( или 3 дб), причем вероятность обнаружения мины в таких условиях менее 0,1.
Вероятность обнаружения в этом случае можно повысить путем улучшения разрешения РЛД за счет, например, использования в составе РЛД широкополосной (в диапазоне рабочих частот) активной фазированной антенной решетки (АФАР).
Ориентируясь на величину полосы рабочих частот (Δf) АФАР порядка (250-300) МГц, в соответствии с зависимостью [9]:
τu=1/Δf,
где τu - эквивалентная длительность сжатого импульса, получаем величину эквивалентной длительности сжатого импульса τu=(3.3-4) нс.
Тогда согласно соотношению δρr=сτu/2, где с=3×108 м/с - скорость распространения радиоволн, разрешение по радиальной дальности составляет δρr=(0.5...0,6) м.
При этом разрешение по горизонтальной дальности (подстилающей поверхности) составит:
δD=ρr/cosθy,
где θy - угол между направлением наблюдения и подстилающей поверхностью (угол наблюдения). С учетом такой особенности на ближней границе участка радиолокационного наблюдения имеем θy ˜ 60° и соответственно получаем δD=(1,0-1,2) м.
Потенциальную разрешающую способность РЛД при боковом обзоре подстилающей поверхности вдоль линии пути (δρx), описывает соотношение
δρx=λro/2Lsinθx, (1)
где λ - длина радиоволны сигналов зондирования РЛД, ro - наклонная дальность до середины участка, L - длина пути перемещения антенны РЛД, θx - угол наблюдения относительно вектора путевой скорости ЛА.
Подставляя в формулу (1) значение несущей частоты зондирующих сигналов РЛД из некоторого участка дециметрового диапазона (0,5-1,5) ГГц, например, среднее его значение, равное 1 ГГц, а также принимая угол θx=90°, значение ro=85 м и длину пути L=25 м за время полета летательного аппарата в течение ˜1с, получаем величину радиального разрешения δρx ˜ 0.5 м.
Однако в действительности при использовании для компенсации влияния различных факторов, таких как, например, формирование ложных отметок из-за высокого уровня боковых лепестков когерентной обработки сигналов, составляющих примерно -13 дб по отношению к главному максимуму, и для повышения устойчивости процесса обработки информации использование весовых сглаживающих функций, имеет место ухудшение разрешающей способности [11]. Так, с учетом такой обработки реальное значение разрешения в поперечном направлении (по кросс-дальности) при θx=90° можно ожидать δρx=(0,7-1) м, а с учетом того, что принимаются «кадры» наблюдения и при θx=30° значение δρx в этих кадрах удвоится. Однако для них разрешение по дальности будет лучше почти в 2 раза, чем для «кадров» наблюдения при θx=90°. В среднем для всех «кадров» когерентной обработки на выбранном элементарном интервале обследования длительностью ˜1 с можно принять δρx=˜1 м и δD=˜ 1 м.
Дальнейшее улучшение разрешающей способности РСА возможно посредством введения некогерентной обработки отдельно сформированных «кадров» наблюдения при когерентной обработке. Получение этих результатов основано на применении методов реконструктивной вычислительной томографии, в частности, на базе применения преобразования Радона [12].
Оценку достижимой разрешающей способности при использовании таких методов можно получить, например, путем построения двумерного портрета в декартовой системе координат по совокупности проекций - одномерных портретов, синтезированных на малых угловых интервалах, сдвинутых по ракурсу относительно друг друга, где соответствующие значения потенциальной разрешающей способности для центральных точек синтезированного двумерного портрета получены в виде следующих зависимостей [13]:

Здесь βо - угловой интервал наблюдения, эквивалентный суммарному ракурсу проекций - одномерных портретов, синтезированных на малых угловых интервалах, сдвинутых по ракурсу относительно друг друга.
Отсюда, при βo=π имеем
 и
и 
Представленные оценки получены на базе формирования функции неопределенности (ФН), что соответствует когерентной обработке сигналов [9]. В данном методе синтезирования на малых угловых интервалах двумерного портрета по его одномерным проекциям ведется без учета нелинейной зависимости фазы от ракурса, что в действительности ухудшает характеристики разрешения относительно потенциально достижимых.
Оценку пространственной селекции вдоль отрезка ρ=(ρx, ρy) в полярной системе координат формируют на базе определения ширины модуля ФН на уровне 0.7 (-3 дб) [10]. При этом для кругового обзора при угловом размере РСА βо=2π потенциальная разрешающая способность по всем пространственным координатам равна δρ=0.18λ, что при гипотетически принятой длине волны λ=0.3 м дает δρ=0.05 м.
При формировании квазиголограммы учитывают формальную возможность для каждого радиоизображения участка местности с помощью последующего проведения процедуры преобразования Фурье вновь получить исходную радиоголограмму. В данном случае такую процедуру осуществляют для каждой проекции, соответствующей преобразованию Радона радиоизображения выделенного участка местности, причем для всех полученных проекций этого участка формируют совокупность отдельных радиоголограмм, каждой из которых свойственно отображение местности под другими ракурсами наблюдения. Соединение таких радиоголограмм с обеспечением необходимой их софазировки дает объединенную радиоголограмму общего интервала ракурсов наблюдения выделенного участка. Однако осуществление такой процедуры сопряжено с трудностями реализации необходимой фазировки и учета нелинейности формирования объединенной радиоголограммы, которая при больших ракурсах наблюдения становится кольцевой. В связи с этим реально получаемое представление подобной радиоголограммы названо квазиголограммой.
В отсутствие когерентности при «сшивании» отдельных «кадров» когерентной обработки на элементарных интервалах обследования имеет место расширение ФН и, как следствие, существенное ухудшение разрешения. Однако это обстоятельство может быть компенсировано, например, предложенным в данном техническом решении режимом проведения телескопического обзора участка местности, при котором разрешающая способность уменьшается всего в 2-3 раза и достигает соответственно значения δρ˜0.15 м. Величину разрешающей способности по всем пространственным координатам δρ˜0.25 м следует ожидать при 3-х кратном обзоре участка местности с изменением курсового угла прямолинейных траекторий вертолета над зондируемым участком местности, а при однократном обзоре местности и некогерентной обработке информации, например по семи кадрам обзора когерентной обработки, разрешение по всем пространственным координатам составит δρ˜0.5 м.
Обеспечение разрешения δρ˜0.5 м по всем координатам по сравнению с разрешением δρ˜1 м дает дополнительное увеличение отношения сигнал/фон в 4 раза (на 6 дб) и суммарное его значение 9 дб. В этом случае в соответствии с приведенными в литературе близкими к данной тематике данными [10] значение вероятности обнаружения противотанковой мины составит 0,25. Использование следующего уровня разрешения δρ˜0.25 м обеспечит обнаружение таких мин с вероятностью не ниже 0,95. В случае мин меньшего размера, в частности, противопехотных мин разрешение δρ˜0.25 м позволит их обнаруживать с вероятностью также не ниже 0,95. Более высокое разрешение δρ˜0.15 м в режиме телескопического обзора даст возможность фиксировать радиоизображение обнаруженных мин с особенностями формирования их «блестящих» при радиооблучении (радиозондировании). Это, в свою очередь, при использовании настоящего технического решения позволяет осуществлять распознавание типов мин с помощью, например, нейроструктур, обеспечивающих в данном случае распознавание, в частности, противотанковых мин с вероятностью не ниже 0,95 и противопехотных с вероятностью не ниже 0,9.
На фиг.1 приведена структурная схема системы дистанционного выявления малоразмерных объектов, на фиг.2 приведена структурная схема радиолокационного датчика, на фиг.3 показан пример условной разметки обследуемого поля, на фиг.4 приведена схема сканирования в течение элементарного интервала времени при облете, на фиг.5 приведена схема сканирования при «телескопическом» обследовании, на фиг.6 показан пример превышения сигналами, отраженными от разных участков подстилающей поверхности, сигналов порогового уровня, заданного равным 8 дБ, на фиг.7 приведено сравнение вероятностей обнаружения при использовании известных методов и предложенного способа на основе реконструктивной томографии с использованием преобразования Радона.
Система дистанционного выявления малоразмерных объектов, для осуществления способа (фиг.1) содержит радиолокационный датчик (РЛД) 1, предназначенный для обеспечения соответственно излучения сигналов, например дециметрового диапазона радиоволн, приема отраженных сигналов при зондировании подстилающей поверхности и формирования соответствующих сигналов для последующей обработки. РЛД 1 первым выходом подключен к первому входу блока 2 согласования (БС), выполненного в виде (на фиг. не показаны) последовательно соединенных преобразователя частоты и АЦП [11] и своим выходом соединенного с первым входом блока 3 формирования радиолокационного изображения (БФРЛИ), выполненного в виде, например, процессорного устройства «Багет» [14].
Выход блока 3 формирования радиолокационного изображения подключен ко входу блока 41 памяти, выполненного в виде оперативного запоминающего устройства, например, на плате типа РСЛ-6646В [15], выходом соединенного с первым входом радиопередающего устройства 5, предназначенного для передачи полученной при полете ЛА и записанной в блоке 41 памяти информации для ее последующей обработки в соответствующий наземный центр (на фиг. не показан) и выполненного в виде соответствующего устройства типа UC4 Marcad Delivery Receiver радиосистемы серии UC фирмы SHURE [16].
Вторым (управляющим) входом радиопередающее устройство 5 подключено к первому выходу вычислительного устройства 61, предназначенного для управления работой связанных с ним блоков и устройств системы и для обработки и передачи сигналов этих блоков и соответствующих устройств и выполненного в виде промышленного компьютера IPPC-950T фирмы Advantech [15], своими вторым выходом соединенного со вторым (управляющим) входом первого блока 41 памяти, группой выходов подключенного к первой группе входов РЛД 1, а третьим выходом соединенного со входом блока 7 синхронизации, выполненного в виде генератора тактовых импульсов [17].
Кроме того, вычислительное устройство 61 своим входом-выходом соединено со входом-выходом первого блока 41 памяти, а четвертым и пятым выходами подключено соответственно к первым входам индикатора 81 и блока 9 определения координат, своими первым и вторым выходами соответственно соединенного с первым входом вычислительного устройства 61 и вторым входом индикатора 81, а радиовходом связанного с радиовходом системы.
Индикатор 81 предназначен для создания визуального представления, например у пилота ЛА, о заданной трассе облета минного поля и степени выполнения этого задания и выполнен в виде соответствующего устройства типа GV-D900 [16].
Блок 9 определения координат (БОК) предназначен для получения информации о координатах обследуемых участков подстилающей поверхности и местонахождения обнаруженных малоразмерных объектов, а также координатной привязке ЛА и выполнен в виде спутникового радионавигационного комплекса СРНК-21ДМ [18].
Блок 7 синхронизации своими первым и вторым выходами соединен со вторыми (синхронизирующими) входами соответственно блока 2 согласования и блока 3 формирования радиолокационного изображения, а группой выходов подключен к группе соответствующих входов РЛД 1, вторым выходом соединенного с третьим входом блока 2 согласования.
Радиопередающее устройство 5 своим радиовыходом связано с радиовходом радиоприемного устройства 10, предназначенного для получения информации с борта ЛА для последующей обработки соответствующими устройствами системы и выполненного в виде соответствующего устройства типа UC1 радиосистемы серии UC фирмы SHURE [16].
Радиоприемное устройство 10 выходом соединено с первым входом второго блока 42 памяти, выполненного в виде оперативного запоминающего устройства, например, на плате типа РСЛ-6646В [15] и своим выходом подключенного к первому входу классификатора 11, предназначенного для реализации процедур обнаружения малоразмерных объектов и их распознавания и выполненного в виде нейросетевого микропроцессора NM 6403 [19].
Классификатор 11 выходом соединен с первым входом дополнительного вычислительного устройства 62, предназначенного для обработки поступающих информационных сигналов и построения карты-схемы расположения и координатной привязки малоразмерных объектов, например, мин в обследованной зоне, а также для обеспечения взаимодействия соответствующих блоков и устройств системы и выполненного в виде промышленного компьютера IPPC-950T фирмы Advantech [15].
Вычислительное устройство 62 своими первым, вторым и третьим выходами подключено соответственно ко вторым входам радиоприемного устройства 10, второго блока 42 памяти и классификатора 11, четвертым и пятым выходами - к первым входам соответственно дополнительного индикатора 82 и печатающего устройства 12, а входом-выходом соединено со входом-выходом второго блока 42 памяти.
Дополнительный индикатор 82 выполнен в виде соответствующего устройства типа GV-D900 [16], а печатающее устройство 12 выполнено в виде принтера hp LaserJet 1200.
При этом группа радио-входов-выходов РЛД 1 связана с соответствующей группой входов-выходов системы, входы вычислительных устройств 61 и 62 подключены соответственно к первому и второму входам системы, оптические выходы индикаторов 81 и 82 связаны с соответствующими выходами системы, а выход печатающего устройства связан с выходом системы.
Радиолокационный датчик 1 (фиг.2) содержит антенное устройство (на фиг. не обозначено), выполненное в виде активной фазированной антенной решетки (АФАР) [20], состоящей из двух антенных решеток (на фиг. не показано) по М независимо подключенных приемо-передающих модулей 13 в каждой, где М=1, ..., 12, и представляет собой отдельно установленную антенную решетку, а также сумматор 14, два коммутатора 15, генератор 16, модулятор 17 и блок 18 формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча для каждого из приемо-передающих модулей 13, причем приемо-передающие модули 13 первыми электрическими входами соединены с соответствующими выходами первого коммутатора 151, первым входом подключенного к первому выходу генератора 16, а вторым входом соединенного с первым выходом блока 18 формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча каждого из приемо-передающих модулей 13, вторые электрические входы которых подключены к соответствующим выходам второго коммутатора 152, первым входом соединенного со вторым выходом блока 18 формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча каждого из приемо-передающих модулей 13, а вторым входом подключенного к первому входу первой группы входов радиолокационного датчика 1, первым выходом соединенного с выходом сумматора 14, соответствующими входами подключенного к выходам соответствующих приемо-передающих модулей 13, а вторым выходом соединенного с выходом генератора 16, первым входом подключенного к выходу модулятора 17, своим первым входом соединенного с третьим входом первой группы входов, а вторым входом подключенного к первому входу второй группы входов радиолокационного датчика 1, при этом второй и третий входы второй группы входов радиолокационного датчика 1 соединены со вторыми входами соответственно генератора 16 и блока 18 формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча каждого из приемо-передающих модулей 13, которые радио-входами-выходами связаны с соответствующими радио-входами-выходами радиолокационного датчика 1.
Приемо-передающие модули 13 предназначены для излучения СВЧ-сигналов дециметрового диапазона и приема соответствующих отраженных, например, от подстилающей поверхности при ее зондировании сигналов и выполнены в виде, например, элементов типа М-2730 [21]. Сумматор 14 выполнен в виде распределителя СВЧ [22] и электрическими входами соединенных с соответствующими выходами.
Коммутаторы 15 выполнены в виде соответствующих устройств [17], причем коммутатор 151 предназначен для переключения режимов (передача или прием) работы приемо-передающих модулей 13 и соответствующего распределения мощности СВЧ сигналов, подводимых к этим модулям от генератора 16, выполненного на основе высокочастотного транзистора, например, транзистора типа 2Т634А-2 [20], а коммутатор 152 предназначен для передачи на каждый из приемо-передающих модулей 13 соответствующих значений параметров соответствующих сигналов от блока 18 формирования заданного распределения амплитуд и фаз сигналов для управления положением антенного луча.
Модулятор 17 предназначен для формирования параметров излучаемого импульсного сигнала, а именно: длительности, периода повторения и частотной модуляции, и выполнен в виде микросхемы типа AT90S4433 [21], а блок 18 формирования текущего закона распределения амплитуд и фаз сигналов для управления положением антенного луча выполнен в виде постоянного запоминающего устройства (ПЗУ) типа 82S191 [17].
Способ повышения разрешения радиолокационного зондирования основан на разработках в соответствующих областях науки и техники и вкратце может быть проиллюстрирован на примере рассмотрения задачи дистанционного с борта летательного аппарата, например вертолета, выявления, включающего поиск, обнаружение и распознавание, установленных как на подстилающей поверхности, так и заглубленных малоразмерных объектов, в том числе разного типа мин.
Возможность обнаружения малоразмерных объектов определяется отношением мощностей сигналов отражения от объекта и фона, определяемого величиной участка подстилающей поверхности, размеры которого, в свою очередь, обусловлены разрешающей способностью радиолокационного датчика (РЛД) в продольном и поперечном направлениях его луча. В том случае, когда объект радиолокационного зондирования находится под поверхностью, дополнительными факторами ухудшения отношения мощностей сигналов от объекта и фона являются прохождение радиоизлучения через слой почвы до объекта и обратно, а также рассеивание энергии отраженного сигнала на границе раздела сред [7].
Обобщенное представление глубины проникновения радиоволн в почву в зависимости от частоты излучения зондирующих сигналов и влажности почвы представлено в указанных материалах для радиоволн мм-, см-, дм- и метрового (м)-диапазонов радиоволн [23]. На большей части земной поверхности влажность почв такова, что сигналы см-диапазона проникают на единицы сантиметров, а сигналы дм-диапазона - на единицы дециметров. Лучшее подпочвенное проникновение обеспечивают радиоволны метрового м-диапазона, свойственные составу спектра короткоимпульсного излучения в виде одного периода колебаний зондирующих сигналов. Однако их использование сопряжено с большими энергетическими потерями, обусловленными, в частности, существенным ухудшением направленных свойств радиоволн с уменьшением их несущей частоты.
Приемлемое проникновение в почву для обнаружения и распознавания, например, противотанковых мин на глубине закладки до 0.3 м обеспечивают радиоволны дм-диапазона, причем существенное повышение разрешающей способности радиолокационного зондирования при применении радиоволн дм-диапазона достигается путем использования режима радиолокационного синтезирования апертуры (РСА) антенны при дискретном режиме обзора с применением электронного управления лучом антенны РЛД, причем особенностью организация РСА антенны РЛД является обеспечение выполнения требования, состоящего в том, чтобы каждая точка обозреваемого участка наблюдалась в данном случае в течение нескольких секунд.
Полученную информацию об интенсивности отражения от подстилающей поверхности на 8 позициях положения луча АФАР за элементарный интервал обследования, равном ˜ 1 с, алгоритмически переносят на горизонтальную поверхность, соответствующую отображению 7 участков подстилающей поверхности размером 60 м × 25 м, занимающих суммарно сектор ±60° бокового обзора участка местности при перемещении за это время реальной антенны РЛД вдоль пути вертолета. Эту информацию, полученную (см. фиг.3) с правой и левой сторон вертолета вдоль его пути на каждом элементарном интервале обследования, фиксируют в оперативной памяти процессорного устройства «Багет» РЛД.
Запомненная информация об интенсивности отражения на 7 участках подстилающей поверхности с каждой стороны вертолета вдоль его прямолинейного пути за время 7 элементарных интервалов обследования позволяет, как показано на фиг.4, составить матрицу (7×7) данных когерентной обработки сигналов отражения на каждом из этих интервалов. Главной диагонали такой матрицы соответствует информация, в частности, для VII участка фиг.4, под 7-ю разными ракурсами наблюдения вдоль пути прямолинейного полета вертолета.
Аналогичное накопление данных когерентной обработки на последовательных элементарных интервалах обследования имеет место при организации режима телескопического обзора, представленного на фиг.5. В случае, если на вираже скорость вертолета такая же, как в условиях прямолинейного полета фиг.4, имеет место при круговом облете одного участка диаметром ˜ 25 м накопление когерентной информации под 15 разными ракурсами его радиолокационного наблюдения с борта вертолета.
Посредством обработки информации на 7-15 участках подстилающей поверхности за элементарный интервал обследования образуется синтезированная диаграмма направленности антенны при некогерентной обработке информации, соответствующая определенному сектору его визирования с борта вертолета. Согласно вышеприведенным результатам расчета при использовании данного технического решения и применении при обработке полученных сигналов, например преобразования Радона, разрешение зондирования может достигать (0,15-0,5) м.
В основе преобразования Радона [12] применительно к рассматриваемому случаю лежит определение проекции некоторой неизвестной функции g(x,y), описывающей расположение в декартовых координатах точек объекта на местности, причем изображение искомого объекта формируют по измерениям доступного ограниченного множества проекций. Эти проекции как функции угла наблюдения β с учетом введения δ-функции определяются выражением:

где u - длина перпендикуляра, опущенного из начала координат на каждую из прямых пересекающих область отображения функции g(x,y).
Кроме того, предполагается возможность получения одно- и двумерного Фурье-преобразований функций p(u,β) и g(x,y), обозначаемых соответственно как P1 (ω,β) и G1 (ωcosβ, ωsinβ).
Тогда, в соответствии с теоремой, утверждающей, что посредством перебора всех возможных значений угла β можно получить все возможные значения центрального сечения функции G1 (ωcosβ, ωsinβ), что равносильно ее полному определению [27], имеем:

и, если далее для этой функции провести обратное преобразование Фурье, то соответственно будет определена (восстановлена) искомая функция g(x,y).
Более детальный анализ формирования соотношения (4) позволяет провести аналогию по формированию результирующей голограммы по отдельным голограммам объектов с функциями рассеяния, совпадающими в некоторой области. Однако в отличие от строгого решения этой задачи [28] в данном случае следует использовать понятие квазиголограммы.
Усматриваемая аналогия формирования результирующей голограммы состоит в том, что на ограниченном отрезке каждой изодали РЛИ вдоль нее располагается восстановленное частичное изображение объекта, которое в соответствии с выражением (3) является его проекцией под ракурсом β. Параметр смещения u относительно начала системы координат параллельных линий, пересекающих геометрический объект g(x,y), характеризует расположение суммарных интенсивностей рассеяния в точках узкой полосы каждой изодали РЛИ.
Выполнение одномерного преобразования Фурье такой проекции объекта возвращает в комплексную область представления ее как квазиголограммы записи рассеянного объектом поля. Последующее объединение всех таких квазиголограмм на базе выражения (4) характеризует формирование результирующей квазиголограммы. Если теперь выполнить при этом условии обратное двумерное преобразование Фурье результирующей квазиголограммы, то обеспечивается восстановление геометрического изображения объекта g(x,y) по совокупности его проекций вида р(u,β) под разными ракурсами.
Такая интерпретация соотношения (4) позволяет условно использовать оценки потенциальной разрешающей способности на местности радиолокационного зондирования, рассчитываемые по формулам типа (2), справедливым при когерентной обработке радиолокационной информации. Вместе с тем это определяет удобную вычислительную схему для проведения обработки некогерентной радиолокационной информации. В данном случае такая схема обеспечивается посредством использования алгоритма свертки и обратного проецирования. Отправным пунктом такого алгоритма служит проведение обратного преобразования Фурье равенства (4), что соответствует следующей расчетной формуле

где весовая функция влияния «размаха» проекций p(u,β)

Алгоритм реконструкции изображения g(x,y) реализуют на базе формулы (5) в виде следующей поэтапной процедуры [29]:
Шаг 1: свертка или фильтрация. Для каждой проекции р(u,β) выполняют свертку с функцией (ядром) hc(u), образуя фильтрованные проекции:

При определении значений ядра hc(u) в его расчетной формуле (6) подинтегральное выражение умножают на оконную функцию W(ω).
Шаг 2: обратное проецирование. Восстановление приближения  к исходной функции g1(x,y) в каждой точке осуществляют суммированием значений вдоль каждой проходящей через эту точку прямой u1=xcosβ+ysinβ:
к исходной функции g1(x,y) в каждой точке осуществляют суммированием значений вдоль каждой проходящей через эту точку прямой u1=xcosβ+ysinβ:

Таким образом, рассматриваемый алгоритм РВТ реализует получение фильтрованных значений проекций объекта для каждого угла наблюдения, а затем интегрирование по переменной результатов полученных наблюдений. Объединение зависимостей (7) и (8) формирует выражение (5) и формально проводит к точному решению, когда для всех ω значение W(ω)=1. Однако в этом случае интеграл (6) расходится и понятие точного решения теряет смысл. Поэтому выбирают функцию окна W(ω) такой, чтобы ограничить вклад в решение частот выше некоторой частоты среза ωс.
В идеале Фурье-образ функции hc(u) с учетом функции окна, т.е. |ω| W(ω), должен иметь приближенно линейный отклик вплоть до некоторой граничной частоты, после которой он должен спадать до нуля при ω=ωс. Этому требованию удовлетворяют атомарные функции, которые в данном случае обеспечивают более лучшее приближение  к исходной функции g1(x,y) [30].
к исходной функции g1(x,y) [30].
Для иллюстрации представленных соотношений рассмотрен поясняющий их в упрощенной постановке пример. Предположим, что ряд локальных неоднородностей (ЛН) РЛИ наблюдаемого участка местности явно обнаруживаются радиоголографической обработкой информации на элементарных интервалах обследования. Другая часть ЛН, включая малоразмерные объекты, в том числе и мины, могут быть обнаружены при повышении разрешения РЛД в процессе проведения дальнейшей обработки радиолокационной информации на базе использования соотношений (7) и (8).
Задача состоит в построении двумерного портрета в декартовой системе координат по совокупности проекций - одномерных портретов, синтезированных на малых угловых интервалах, сдвинутых по ракурсу относительно друг друга [13]. Предполагается, что анализируемые РЛИ как обнаруженные на первом этапе обработки, так и необнаруженные находятся в окрестности начала координат зоны обзора на текущем интервале обследования. Относительно точки в начале координат этой зоны рассматривается перемещение вертолета с РЛД по дуге окружности радиуса Ro.
В действительности имеет место более сложное перемещение РЛД относительно точки начала координат, однако для упрощения задачи принимаем, что изменение ракурса участка наблюдения на элементарном интервале обследования мало и тогда Ro≈const. Дополнительно принимают также, что точки интенсивного радиоотражения объекта («блестящие» точки ЛН), далее обозначаемые БТ, расположены в плоскости перемещения РЛД по радиусу Ro.
Амплитудно-фазовая характеристика модели отраженного сигнала y(β) имеет пиковую структуру, что определяет возможность отождествления и сопровождения пиков, обусловленных одной и той же БТ соседних портретов. Совместная обработка доплеровских частот ωj(βl) пиков (l - номер портрета объекта с серединой интервала его наблюдения βl), отождествленных в соседних портретах, позволяет получить РЛИ объекта в виде оценки декартовых компонент радиус-векторов его БТ: ρj=(ρjx, ρjy). Предполагается также, что в измерительном устройстве наряду с полезным сигналом у(β) присутствует аддитивный распределенный по нормальному закону шум с нулевым средним и дисперсией σш 2.
В рамках принятой модели сигнал у(β) представляет собой суперпозицию гармонических сигналов с неизвестными амплитудами, частотами и фазами. Применение метода максимального правдоподобия позволяет определить эти неизвестные параметры при условии разрешения пиков гармонического сигнала. Полученная оценка ωj(βl) методом максимального правдоподобия в асимптотике подчиняется нормальному закону со средним, равным истинному значению доплеровской частоты БТ на данном βl: Мωj(β)=(pjxcosβl-ρjysinβl) и дисперсией D(ωj(βl)), равной потенциальной точности измерения частоты гармонического сигнала 6 dβ/qΔβ3, где q=а2/σш 2 - отношение сигнал/шум по данной БТ и dβ - угловой шаг измерения наблюдения ракурсов РЛИ объекта.
Представленные в работе [13] расчетные формулы по структуре соответствуют выражению (8). В данном случае в силу линейной зависимости от частоты ω(β) при измерении ее среднего значения имеем среднее значение оценок координат ρjx, ρjy и они совпадают с их истинными значениями. Последние определяют положение на плоскости БТ двумерного портрета восстанавливаемого объекта. Качество построения двумерного портрета объекта может быть охарактеризовано флюктуационной ошибкой измерения координат радиус-векторов ρjx и ρjy его БТ и их потенциальной разрешающей способностью.
В представленных материалах исследования при некоторых ограничениях по расположению БТ отражений обозреваемой ограниченной области получены приведенные выше (2) потенциально достижимые оценки разрешающей способности рассматриваемого метода томографии. Полученное потенциально достижимое разрешение рассматриваемой модели сигнала при использовании метода синтезированной апертуры необходимо корректировать, что обусловлено наличием шумов измерения доплеровских частот ω при формировании оценок координат.
Описание работы системы дистанционного выявления малоразмерных объектов для осуществления способа повышения радиолокационного разрешения рассмотрим на примере конкретных условий ее реализации способом дистанционного выявления малоразмерных объектов с помощью РЛД типа вертолетного когерентно-импульсного радиолокационного комплекса [25].
Перед проведением радиолокационного зондирования выделенного участка местности (предположительно не более (5-10) км2), на котором предполагается наличие мин, проводят привязку формируемого радиолокационного изображения (РЛИ) подстилающей поверхности к реальным ориентирам (реперам), обрамляющим это поле. Таких ориентиров (см. фиг.3) на местности должно быть не менее 3-х, при недостатке их создают искусственно, при этом в качестве таких ориентиров могут служить радиомаяки, радио или светоотражатели, или, наконец, например, пронумерованные кубы или щиты с различимыми с борта ЛА номерами. Относительно этих ориентиров по окончанию работ представляют радиолокационную карту нахождения искомых малоразмерных объектов на подстилающей поверхности, в том числе и при подповерхностном их расположении.
На одном из ориентиров выделенного участка местности устанавливают спутниковый радионавигационным комплекс (СРНК) типа СРНК-21ДВ (см. фиг.3) для обеспечения определения относительных координат между ним и ЛА, например, вертолетом, проводящим радиолокационное зондирование поля и имеющим аналогичный радионавигационный комплекс (блок 9 определения координат). Другие ориентиры, обрамляющие поле, привязывают к ориентиру со спутниковым радионавигационным комплексом, например, геодезическими средствами с помощью теодолитов и переносных штанг. При этом ориентиры устанавливают по периметру обследуемого поля, на расстоянии друг от друга, равном (0,3-0,9) ширины полосы зондирования при пролете. На выделенных ориентирах с геодезической привязкой устанавливаются радиомаяки с тем, чтобы при управлении вертолетом по их излучению организовать полеты над минным полем с равномерным многократным его покрытием участками радиолокационного наблюдения под ракурсами, обеспечивающими получение достаточной для выполнения вышеуказанных процедур информации. При этом предполагают, что привязку к местности производят в оперативно сформированной земной системе координат (ЗСК) относительно точки расположения ориентира с радионавигационным комплексом и дискрет измерений координат по осям {X,Y,Z} ЗСК составляет 1 м, то есть фактически задают характеристику разрешения точек в ЗСК, соответствующих обнаружению малоразмерных объектов, в том числе и мин, с учетом неопределенности их положения на площадках разрешения подстилающей поверхности размером 1 м × 1 м.
Кроме того, непосредственно перед проведением работ по зондированию минного поля производят «списывание» систематической ошибки определения взаимных координат вертолета и ориентира с СРНК. Эту процедуру выполняют посредством «зависания» вертолета над ориентиром с СРНК и визуальной фиксации его с борта вертолета с помощью, например, видеокамеры (на фиг. не показана) с углом обзора до 20° относительно вертикальной оси вертолета и с разрешением, обеспечивающим фиксацию одним пикселем площадки размером 1,5 × 1,5 см2 на подстилающей поверхности с высоты ˜ 60 м, например камеры типа TRV830E, размещенной на гироплатформе (на фиг. не показана) вблизи центра масс вертолета. При использовании для различения ориентира размером на подстилающей поверхности 2-3 пикселя такая камера с точностью в несколько см позволяет определить положение ориентира относительно проекции центра масс вертолета на местности. Такая юстировка взаимных координат двух объектов с СРНК с устранением систематической ошибки фактически позволяет с точностью порядка 1 дм регулярно определять положение точки проекции центра масс вертолета на подстилающую поверхность относительно расположенного на ней ориентира с СРНК на протяжении длительного отрезка времени, достаточного для проведения работ по зондированию минного поля.
Для определения координат обнаруженных РЛД малоразмерных объектов необходимо измерение с точностью около 1 м высоты полета вертолета над зондируемой подстилающей поверхностью. Эти измерения в рассматриваемом случае проводят радиотехническим способом в рамках штатной аппаратуры и алгоритмом обеспечения работы РЛД.
Организация обработки радиолокационной информации наблюдения участков местности с борта в оперативно сформированной ЗСК дает возможность проведения фильтрации бортовых ошибок измерения и принципиального получения привязки наблюдаемых объектов к расположению их на местности с точностью порядка 1 дм. Это новое качество обеспечивает повышение разрешения зондирования участков на местности при наблюдении их под разными ракурсами. В свою очередь, это обеспечивает повышение отношения сигнала/фон для малоразмерных объектов, что дает более достоверное их обнаружение и распознавание.
В качестве примера рассмотрим процесс получения радиолокационного изображения (РЛИ) участка минного поля с борта вертолета, осуществляющего боковой обзор по отношению к направлению его полета с использованием бортового радиолокационного датчика 1 (РЛД 1) при полете вертолета с постоянной скоростью ˜ 90 км/ч на высоте (50-60) м. Антенна (положение приемо-передающих модулей 13) РЛД 1 вертолета наклонена к подстилающей поверхности, обеспечивая в вертикальной плоскости под углом радиолокационного зондирования (20-60)° обзор полосы местности от 30 м до 90 м относительно проекции на подстилающую поверхность траектории полета вертолета (фиг.3).
Сектор отклонения луча антенны РЛД 1 в горизонтальной плоскости составляет порядка ±60°, что определяет охват этим сектором длины участка обозреваемой полосы местности ˜ 175 м вдоль линии пути вертолета. Такой длине соответствует отрезок пути вертолета, на протяжении которого в течение ˜ 7 с каждая точка участка обозреваемой полосы находится в секторе отклонения луча антенны РЛД 1.
С помощью задания когерентного излучения РЛД 1 организуют режим синтезированной апертуры антенны, который позволяет за время наблюдения ˜ 1 с получить с большим разрешением РЛИ зондируемого участка местности. Время наблюдения участка местности с помощью РЛД в течение ˜ 1 с выбрано, исходя из практики формирования РСА при использовании когерентной обработки сигналов [11]. Весь сектор зоны обзора РЛД 1 ±60° разделяют на 8 парциальных секторов шириной по 15° в предположении возможности одновременного приема информации во всех 8 секторах в течение 1,024 с. Это может быть обеспечено в случае, когда луч АФАР РЛД 1, находясь в одном секторе в течение 1 мс для формирования 128 изодалей по расстоянию (по радиальному направлению от РЛС) с дискретом 0.5 м, последовательно перемещают на такие же интервалы времени в другие сектора и через 7 мс вновь возвращают в исходное положение. В результате этого при соответствующем получении отраженных сигналов имеют данные для формирования 8 радиоголограмм в виде квадратных матриц 128×128 определения интенсивности отражения 8х214 точек подстилающей поверхности. Согласно общему подходу восстановления РЛИ по радиоголограмме [26] обработку их проводят с использованием процедуры двухмерного быстрого преобразования Фурье (БПФ). Полученными значениями интенсивности обнаружения в полярной системе координат аппроксимируют 10500 узлов земной декартовой системы координат, разделяемых ячейками 1 м × 1 м, площадь обозреваемого участка местности размером 175 м × 60 м.
На следующем ˜ 1 с интервале времени рассмотренную процедуру получения информации для формирования 8 радиоголограмм повторяют на новом отрезке траектории полета вертолета, соответствующем некоторому усредненному ракурсу наблюдения. Этот ракурс наблюдения выделенного участка местности для каждого i-го отрезка траектории полета вертолета далее обозначается как βi(i=1, 2, ..., 7). Параллельно приему РЛД 1 данных для ракурса i-го наблюдения с помощью блока 3 производят обработку информации для (i-1)-го значения ракурса.
Участок минного поля в секторе обзора антенны РЛД шириной 60 м и длиной 175 м вдоль пути вертолета, который он преодолевает за ˜ 7 с, разделяют на 7 примыкающие друг к другу части полосок размером 60 м × 25 м, соответствующих ˜ 1 с циклу формирования «кадра» изображения местности при когерентной обработке информации. Фиг.4 иллюстрирует характер пересечения этих полосок веерным расположением лучей РЛД 1 вертолета, в частности, на отрезке его траектории от момента времени t7 до момента времени t14, отсчитываемых от начала времени накопления данных для некогерентной обработки информации.
При движении вертолета каждую ˜ 1 с производят прием данных, соответствующих отраженным с участков подстилающей поверхности, номера которых относительно текущего положения вертолета показаны на фиг.4, сигналов для проведения в блоке 3 формирования радиолокационного изображения их когерентной обработки по 49 «кадрам». При наличии данных для такой матрицы через каждые 7 с наступает возможность организации некогерентной обработки информации для одной из полосок для 7 существенно разных диапазонов ракурсов радиолокационного ее облучения: ±(60°-51°), ±(51°-40°), ±(40°-22°) и ±22°. На фиг.4 эту ситуацию иллюстрирует матрица «кадров» размером (7×7), главная диагональ которой соответствует полоске местности с 7-ю «кадрами» для некогерентной обработки информации.
На последующих (˜ 1 с) интервалах времени (элементарных интервалах) рассмотренную процедуру получения информации для формирования 8 радиоголограмм с каждого нового отрезка траектории полета вертолета, соответствующую некоторому усредненному ракурсу наблюдения, повторяют. В результате обработки информации 8 каналов за ˜ 1 с формируют синтезированную диаграмму направленности (СДН) антенны, соответствующую сектору угла ±60° бокового обзора участка местности при перемещении реальной антенны РЛД 1 вдоль пути вертолета.
Кроме того, длину каждого контрольного участка выбирают с учетом возможности охвата такого участка сектором отклонения луча антенны РЛС ЛА, величину шага дискретного поворота радиолокационного луча антенны РЛС выбирают соответствующей ширине этого луча в горизонтальной плоскости, а заданный угол поворота луча выбирают соответствующим углу охвата участка сектором отклонения луча антенны РЛС ЛА.
При этом в качестве признаков, определяющих или участки с возможным местонахождением малоразмерных объектов, или места нахождения на них объектов, или находящиеся в этих местах объекты, выбирают характеристики интенсивности и/или протяженности дискретных сигналов соответствующего радиоизображения.
Проведение дополнительной некогерентной обработки информации по 7 «кадрам» позволяет в несколько раз увеличить линейное разрешение на местности. Если из-за малости полученных на некоторых участках соотношений сигнал/фон результаты обработки могут оказаться недостаточными для принятия решения об обнаружении, в частности, мин, проводят дополнительное обследование «подозрительных» участков. Естественным способом дальнейшего уменьшения величины линейного разрешения на местности является повторное зондирование этих участков с существенным увеличением диапазона ракурсов их наблюдения, путем, например, кругового (называемого также телескопическим) облета этих участков местности.
Телескопический режим наблюдения при ширине зондирующего луча РЛД θ05=15° позволяет при наклонной дальности 85 м охватить площадку местности диаметром около 25 м и обеспечить в центральной части ее линейное разрешение вплоть до половины длины радиоволны зондирующего сигнала РЛД 1.
При недостаточности одноразового осмотра минного поля и частых обращений к режиму телескопического обзора возможен другой вариант организации поиска с многократным наблюдением участков минного поля под различными ракурсами. В этом варианте организации поиска мин вертолет многократно пересекает это поле, не меняя курса и делая развороты вне поля, чтобы пересечь его под другим курсовым направлением полета.
Для выдерживания курса вертолета при ручном пилотировании на поверхность минного поля предварительно могут быть сброшены оптически заметные буйки, служащие ориентирами пилота при полете вертолета. Эти буйки при проведении радиолокационного зондирования минного поля фиксируют также видеокамерой (на фиг. не показана), расположенной, например, под днищем кабины вертолета. Видеосъемка позволяет организовать привязку формируемого на борту вертолета радиолокационного изображения к ориентирам на местности, в том числе к буйкам на минном поле, относительно которых в дальнейшем производят операцию, связанную с проведением разминирования.
Троекратный пролет вертолета с постоянным курсом над малоразмерными объектами местности под курсовыми углами 0, 120° и 240° практически эквивалентен круговому облету во всем диапазоне ракурсов 360° телескопического обзора выделенного участка местности. В данном случае при соблюдении вышеуказанных параметров полета регулярным скользящим 7-секундным циклом обработки картографической информации покрывают ˜ 1 га местности, что почти в 20 раз больше наблюдаемого участка в режиме телескопического обзора. Однако при таком обзоре необходимо накопление огромного объема информации отдельных «кадров» местности площадью каждого 0.15 га. При 3-х кратном покрытии минного поля площадью 1 км2 подобная обработка потребует объем памяти запоминающих устройств для фиксирования радиолокационных данных почти 15000 «кадров» местности.
Обработку производят в вычислительном центре командного пункта (КП) (на фиг.3 не пронумерован), куда автоматически с помощью радиопередающего и радиоприемного устройств (соответственно устройств 5 и 10) поступает соответствующая информация.
Дополнительное увеличение линейного разрешения в режиме телескопического обзора участка местности возможно посредством увеличения скорости полета вертолета с тем, чтобы на регулярном скользящем 7 с цикле обработки картографической информации охватить весь диапазон ракурсов наблюдения малоразмерных объектов. В данном случае для наклонной дальности 85 м до центра наблюдаемого участка при скорости полета вертолета 90 км/час диапазон ракурсов не превышает 120°.
При организации поиска производят последовательный просмотр участков заданной местности (предполагаемого минного поля). Процедуры обнаружения и распознавания малоразмерных объектов проводят в соответствии с алгоритмом, реализуемым в вычислительном устройстве 62.
Обнаружение объекта
Каждый «кадр» РЛИ, полученный в результате зондирования и записанный в блок памяти БП 41, а затем переданный в БП 42, представляет собой матрицу, в которой положение элементов соответствует положениям элементарных площадок в геодезической сетке. Размеры таких площадок определяются той разрешающей способностью системы, которой она обладает на этапе обнаружения (например, 1×1 м). В визуальном изображении такая дискретная площадка будет соответствовать одному пикселю, яркость которого определится суммой радиолокационных сигналов от земной поверхности, переотражений от подповерхностных слоев и от объекта, расположенного на поверхности или под ней. Вполне очевидно, что в зависимости от рельефа местности наклоны элементарных площадок будут изменяться, но в большинстве случаев эти изменения характерны не для одной элементарной площадки, а для некоторой их группы. Для такой группы может быть вычислен усредненный уровень мощности принимаемых сигналов Рср. Далее устанавливается порог Пк, обеспечивающий заданную вероятность ложных тревог, которая должна выдерживаться постоянной для всех последующих групп площадок. Факт обнаружения объекта будет считаться установленным в случае превышения порога сигналом с мощностью Рcij в ячейке матрицы Sij. При этом вероятность обнаружения Робн зависит от соотношения Ксф=Рij/Рср. При наблюдении площадки в одном пролете над ней под некоторым курсовым углом Ксф может составить (3-9) дБ [8] в зависимости от длины излучаемой волны. При Ксф=9 дБ вероятность обнаружения объекта на фоне отражений от подстилающей поверхности, согласно [10] составит Робн=(0,2-0,3). Повторные наблюдения этого участка при одном и том же курсовом угле полета ЛА позволят увеличить вероятность обнаружения. В качестве дальнейшего рассмотрения взят участок, сигнал от которого едва превысил пороговый уровень и имел Ксф=9 дБ (участок №4 фиг.6) при разрешающей способности БРЛС с синтезированной апертурой, равной 1×1 м.
При увеличении количества повторных полетов над участком №4 с использованием метода синтезированной апертуры Робн будет возрастать (фиг.7). Первый случай соответствует N полетам (1, 2, 3, 4) над участком №4, а второй - такому же количеству полетов под разными курсовыми углами М над тем же участком. При одинаковом начальном соотношении Ксф=9 дБ для обоих вариантов при каждом последующем пролете над участком №4 разрешающая способность в предлагаемой системе возрастает в 2 раза по каждой координате, в результате чего наблюдаемая площадь уменьшается в 4 раза (6 дБ), во столько же возрастает Ксф. Это приводит к быстрому росту вероятности обнаружения до уровня (0,95-0,98) при многократном просмотре одного и того же участка. В то же время из фиг.7 видно, что при использовании существующих систем с синтезированной апертурой увеличение количества пролетов не приводит к повышению разрешающей способности, а рост Робн объясняется лишь результатом обработки накопленной информации.
Алгоритм обнаружения объектов можно представить в следующем виде:
Первый проход групп площадок при разрешении, равном 1×1 м:
Определение порога для групп участков:
где N=5
Формирование пороговой матрицы K[L,M ], элемент которой обозначим Кij

Второй проход групп площадок при разрешении, равном 0,5×0,5

Третий проход групп площадок при разрешении, равном 0,5×0,5

Таким образом, после обработки первичной информации получаем матрицу K[L,M], элементы которой Кij будут иметь значения 0; 1; 2; 3, что определяет соответствующую степень достоверности обнаружения некоторого объекта.
После выполнения процедуры обнаружения, произведенной с различной степенью достоверности на различных участках, производится автоматическое выделение малоразмерных объектов. Если при анализе содержимого матрицы K[L,M ] будет обнаружена компактная группа значений ≥1, то это будет означать наличие протяженного объекта. В противоположном случае, т.е. когда в матрице будут присутствовать разрозненные значения, отличные от нуля, то эти места будут соответствовать местоположению малоразмерных объектов. Причем, значение «1» означает самую низкую достоверность обнаружения малоразмерного объекта и это место на земной поверхности необходимо проверить дополнительно из-за того, что здесь могла быть ложная тревога.
Алгоритм выделения малоразмерного объекта


После выделения малоразмерных объектов над одним из них, имеющим высокую достоверность, производится облет в режиме телескопического наблюдения, при котором обеспечивают разрешающую способность системы порядка 0,15 м × 0,15 м.
В этом режиме РЛИ со сверхразрешением передают на нейросетевую структуру, которая путем сравнения с эталоном, которому она обучена, должна распознать обнаруженный объект. Малоразмерный объект может быть, например, осколком снаряда, куском трубы или миной определенного типа. Классификатор 11 на своем выходе должен дать ответ на принадлежность обнаруженного объекта к тому или иному классу малоразмерных объектов.
Распознавание объекта основано на применении нейросетевых структур (НСС) [34]. НСС состоит из схемы Кохонена и многослойного перцептрона. На первом этапе функционирования НСС работает схема Кохонена, которая используется в качестве обнаружителя, а на втором (распознавание) - многослойный перцептрон (МП).
Известные парадигмы (схемы) НСС основаны на схеме искусственного нейрона (ИН), которая в общих чертах копирует структуру естественного нейрона. Основу ИН составляет сумматор, умножитель и пороговая схема (на фиг. не показаны). На входные сигналы, поступающие на ИН, через умножители накладываются определенным образом задаваемые весовые коэффициенты, а суммарный сигнал поступает на пороговую схему, в которой реализуется нелинейная функция активации. Форма этой функции может иметь вид сигмоиды, единичного скачка, квадратичной или другой зависимости. Выходом ИН могут быть значения 0 или 1 для функции единичного скачка, либо промежуточные значения между 0 и 1 (или -1 и 1) для других функций. В результате нейрон будет считаться возбужденным (положительные значения или 1 на его выходе), либо заторможенным ( отрицательные значения или 0 на выходе). В многослойных схемах НСС между входным и выходным слоями могут существовать один или более промежуточных слоев, связанные с предыдущими и последующими слоями определенным образом. На выходах нейронов последнего слоя будет сформирован результат работы всей нейросети.
Общим свойством для всех видов НСС является то, что они имеют два режима работы - обучение и воспроизведение. Следовательно, если НСС является обучаемой структурой, то она заранее не программируется, а обучаясь без программирования, НСС представляет собой адаптивную или самоорганизующуюся вычислительную машину.
Работа схемы Кохонена основана на принципе конкуренции и наилучшим образом подходит для выявления неоднородностей, чаще всего встречающихся на изображении при проведении первичной обработки, что является важным свойством для применения данной схемы в качестве обнаружителя для выявления характерных неоднородностей. При сканировании изображения скользящим окном в этой НСС образуются кластеры, соответствующие появлению сигналов от «победивших» нейронов. Эти кластеры по мере движения окна по строкам усиливаются или ослабляются. После сканирования всего изображения в среднем слое НСС будут образованы кластеры неоднородностей, чаще всего встречающиеся на изображении. После этого содержимое кластеров передают в многослойный перцептрон, который заранее обучен распознаванию некоторых фигур (прямоугольник, эллипс, квадрат и др.) различной ориентации и их сочетаний. После обработки всего изображения на выходе МП получают отфильтрованную информацию, в которой отсутствуют не связанные с эталонными изображениями и их сочетаниями образы.
Использованная в созданной НСС схема Кохонена (СК) выполнена как двухслойная нейросеть. Входной слой фактически является буфером между входными сигналами и внутренним слоем нейронов, поэтому не считается слоем нейронов. Нейроны всех слоев имеют между собой связи с определенными весовыми коэффициентами, например mij, Wij. Коэффициенты mij первоначально назначают случайным образом, а затем на каждом шаге вычислений настраивают
mij=mij+С(Ei-mij)Yj, где 0<С<1,
Еi - нормированные значения входных сигналов,
Yj - выходное значение J-нейрона,
Yj=fWjkΣmkiEi-(ΣΣmjiEi-G),
где G - пороговое значение.
В процессе функционирования (самоорганизации) на выходе сети Кохонена формируют кластеры - группы активных нейронов, характеризующие определенные категории входных векторов, соответствующие одной пространственной ситуации.
При сходстве полученного от сети Кохонена образа с соответствующим эталонным образом на выходе перцептрона активизируют информацию об одном из классов образов, например, или «мина», или «осколок снаряда», или «кусок трубы», или «неопознанный объект».
Алгоритм работы блока 3 формирования радиолокационного изображения приведен при описании получения радиоголограмм и преобразования Радона.
Входная информация поступает по цифровым линиям связи (на фиг. не показаны):
- из БСогл 2 в виде последовательности импульсов (16 разрядов) с частотой 300 МГц;
- из БСинхр 7 по каналу синхронизации с частотой передачи импульсов 1 ГГц;
- из ВУ 61 по каналу передачи траекторных данных о движении вертолета в виде 16 разрядных слов с частотой 1 кГц.
Выходная информация алгоритма представляет собой массив данных, который передают в блок 41 памяти для оперативного хранения с целью последующей их передачи на обработку.
Алгоритм БФРЛИ включает следующую последовательность действий:
1) проведение процедуры цифрового фазового детектирования сигнальной информации промежуточной частоты;
2) формирование для каждой пачки 8 отраженных импульсов длительностью, например, 0.2 мкс и периодом повторения 1 мкс значений комплексных чисел с учетом корректирующего фазового множителя компенсации задержки сигнала для среднего значения несущей частоты импульсов пачки и общего индекса частотной модуляции ЛЧМ, например, μ=300 МГц/с;
3) запись последовательности комплексных чисел в виде массива i-й строки каждой последовательно образуемой m-й зоны обзора луча (m=1, 2, ..., 8) при его перемещении с дискретом по времени 1024 мкс в секторе бокового обзора ±60° РЛД относительно прямолинейного полета вертолета;
4) формирование на элементарном интервале обследования длительностью 1,048 с для 8 зон обзора луча матриц исходных данных размером (128×128);
5) определение координат центра каждой m-й зоны обзора луча и значения наклонной дальности в зависимости от высоты полета вертолета;
6) оценка радиальной и тангенциальной составляющих скорости движения вертолета относительно центров каждой m-й зоны обзора луча в середине элементарного интервала обследования;
7) определение доплеровского сдвига, вызванного скоростью движения вертолета по радиальной составляющей, для каждой из 128 частот зондирования;
8) проведение корректировки значений комплексных элементов 8 матриц размером (128×128) с целью исключения влияния радиального приближения вертолета;
9) определение сектора ракурсов наблюдения каждого центра m-й зоны обзора луча;
10) формирование 8 матриц размером (128×128), соответствующих дискретным двукоординатным радиоголограммам вращающихся объектов;
11) выполнение двумерного БПФ 8 указанных матриц;
12) получение дискретных образов восстановленных РЛИ участков подстилающей поверхности соответствующих радиоголограмм;
13) представление 128×128 значений элементов 8 матриц обзора лучей РЛД в полярной системе координат в декартовую систему координат подстилающей поверхности, охватываемую «кадром» наблюдения 175 м × 60 м, и интерполяция разнесения этих данных «кадра» на 7 матриц, соответствующих площадкам 60 м × 25 м;
14) занесение в память данных по каждой из площадок, зафиксированных на текущем элементарном интервале обследования;
15) формирование аналогичных данных для 7 последовательных «кадров» в виде клеточной матрицы (7×7) значений точек площадок;
16) выделение главной диагонали сформированной клеточной матрицы;
17) проведение процедуры составления проекций р(u,β) реконструируемого образа объекта, наблюдаемого под 7 ракурсами;
18) проведение в соответствии с формулой (7) операции свертки проекций р(u,β) с заранее рассчитанным значением ядра hc(u), причем определение фильтрованного значения ph(u,β) выполняют в частотной области, используя Фурье-преобразование проекции р(u,β) и ядра hc(u) и последующее обратное Фурье-преобразование произведения их изображений;
19) восстановление согласно формуле (8) приближения к исходной функции g1(x,y) по фильтрованным значениям рh(u,β) в каждой точке суммированием значений данных вдоль каждой прямой xcosβ+ysinβ=u1, проходящей через эту точку [31];
20) пересчет с использованием интерполяционных сплайнов 4-го порядка значений данных , полученных для каждой прямой xcosβ+ysinβ=u1 декартовой системы координат с разбиением сетки узлов 1 м × 1 м, в сетку узлов 0.1 м × 0.1 м [32];
21) определение превышений над адаптивным порогом накопленных значений интенсивностей отражения от подстилающей поверхности для каждого участка размером 60 м × 25 м;
22) проведение кластерного анализа для определения оценки расположения малоразмерных объектов, включая мины;
23) регулярное повторение представленных выше вычислительных процедур на каждом элементарном интервале обследования;
24) передача текущей информации в БП 41 для выполнения более детального анализа полученных данных в процессе полета либо после полета на КП.
Объем вычислительных затрат по аналогии с расчетом вычислительной загрузки ЦВМ при решении подобных задач [14] для обеспечения работы всех алгоритмов БФРЛИ в реальном времени составит величину порядка 45 млн.опер/с. В целом выполнение всех вычислительных процедур по формированию РЛИ малоразмерных объектов на местности в реальном времени поступления информации потребует порядка 50 млн. опер./с, что может быть реализовано, например, перепрограммируемыми сигнальными процессорами типа «Багет» [14].
Блок ВУ 61 выполняет следующие задачи:
запуск блока синхронизации 7, который формирует сетку тактовых импульсов для синхронизации работы всех блоков системы;
выделение по требованию оператора из блока памяти 41, в котором фактически заполняют и сохраняют матрицу Sij, локальных участков матрицы Sij для визуальной оценки возможного нахождения в них миноподобных объектов;
передача информации об РЛИ для текущих участков местности на радиопередающее устройство 5 для ее трансляции в наземный центр обработки (КП) и на кабинный индикатор 81;
выдача в РЛД 1 информации по управлению текущим положением антенного луча и по значениям параметров излучаемого сигнала для каждого режима работы системы;
управление работой блока 9 определения координат.
Принципиальным моментом является осуществление последней функции, выполнение которой определяет точность работы всей системы. Действительно, от точности привязки положений ЛА и луча АФАР к карте местности зависит и точность определения координат обнаруживаемых объектов и в конечном счете эффективность работы системы. Поэтому поэтапно рассмотрим подготовительные операции и работу блока 61.
Этап 1.
Перед началом облета минного поля по сигналам спутниковой связи GPS определяют координаты ЛА (в режиме зависания или при движении с малой скоростью) и радиомаяка (РМ) с точностью (3-5) см. Одновременно с такой же точностью производят тарировку видеокамеры по отражателю, расположенному на РМ (на фиг. не показаны). Полученное точечное видеоизображение от этого отражателя будет принято за начало координат на визуальном изображении местности. При этом визуальному началу координат приписывают GPS-координаты РМ, полученные по каналу связи через блок 9 определения координат. Далее все объекты, попадающие в поле зрения видеокамеры, будут иметь координаты относительно положения РМ. Относительно начальной точки высвечивают и текущие положения ЛА, координаты которого определяют через систему GPS и, следовательно, также привязывают к визуальному началу координат.
Этап 2.
При систематическом просмотре местности с помощью РЛД 1 системы выявления малоразмерных объектов на экран индикатора 81 выводят и в дальнейшем сохраняют увеличивающиеся по длине в процессе полета ЛА полосы, соответствующие текущим и просмотренным «кадрам» земной поверхности. Эти полосы соответствуют также участкам пересечения диаграммы направленности главного лепестка антенного луча в его текущих положениях плоскостью земной поверхности при данной высоте полета ЛА. При этом координаты указанных участков пересечения вычислены в ВУ 61 и представлены на экране индикатора 81.
Этап 3.
Визуальная карта местности для улучшения наблюдаемости радиолокационных отражений устраняется путем отключения от индикатора видеокамеры. Ее подключение будет происходить лишь в моменты наблюдения ярких точек от оптических отражателей, установленных по контуру поля для корректровки курсового маршрута ЛА. Таким образом, на индикатор выводят: полосы, соответствующие просмотренным участкам земной поверхности; запомненные и текущие РЛИ; положения реперных точек от оптических отражателей. После завершения полета на экране будут видны те участки, которые оказались пропущенными при радиолокационном осмотре всего поля или были просмотрены только по одному курсовому маршруту (бледные участки).
Этап 4.
При радиолокационном осмотре местности на экран индикатора 82 выводят РЛИ в виде набора точек, соответствующих обнаруженным объектам в «кадрах» просмотренных участков земной поверхности. Причем в режиме поиска каждая точка будет соответствовать элементарной площадке разрешения размером 1×1 м. Яркость точки в свою очередь будет зависеть от степени достоверности обнаружения объекта в этом месте. В ВУ 61 производят пересчет координат обнаруженных объектов из полярной системы, в которой работает антенна бортового радиолокационного устройства, в декартовую систему, привязанную к карте местности.
Блок 62 так же, как и бортовой блок 61, представляет собой вычислительно-управляющее устройство, основной функцией которого является управление потоком информации, поступающей от бортовой части системы. Все РЛИ в «кадрах» земной поверхности и видеоизображения поступают в блок памяти БП 42. Память в БП 42 разделена на две области. В одной из них сохраняют поступающие видеоизображения и РЛИ, а в другой части - РЛИ, прошедшие обработку в классификаторе 11 и передаваемые от ВУ 62. Управляющие функции ВУ 62 проявляются в передаче команд на выдачу любой информации от блока БП, затребованной оператором, и выводом ее на индикатор 82 или на печатающее устройство ПУ 12.
Блок ВУ 62 работает в 3 основных режимах:
Режим 1. Прием информации от блока 11 и передача ее на индикатор 82.
«Кадры» с радиолокационными изображениями по команде от ВУ 62 передают в классификатор 11, в котором производят все необходимые процедуры по обработке РЛИ: обнаружение объектов, выделение и распознавание малоразмерных объектов. Каждый «кадр» имеет свой номер, по которому ВУ 62 производит его «привязку» к карте местности, т.е. к видеоизображению, получаемому от видеокамеры, хранящемуся в БП 42 и выводимому на индикатор 82. При поступлении с классификатора очередного РЛИ ВУ 62 осуществляет его координатную привязку.
Режим 2. Передача обработанных РЛИ в БП 42.
Режим 3. Управление передачей информации по требованию оператора: вывод результатов поиска на индикатор или/и на печатающее устройство ПУ 12.
Список использованных источников информации:
1. Кучко А.С. Аэрофотография и специальные фотографические исследования. М.: Недра, 1988, с.с.51-53.
2. Вельцер В. Аэроснимки в военном деле. М.: Военное издательство, 1990, с.с.71-80.
3. Патент РФ №2211461 с приоритетом от 18.06.2001 г., МПК7: G 01 S 13/90.
4. Саблин В.Н. Новые технологии в гуманитарном разминировании. Труды юбилейной научно-технической конференции, посвященной 30-летию образования ЦНИИРЭС. Изд. АО «ЦНИИРЭС», 2001, часть 1, с.с.20 -23.
5. Naval Research Laboratory США, приведенную в www. Science news by Miguel Vicens. corn.
6. Саблин В.Н. Новые технологии в гуманитарном разминировании, Труды юбилейной научно-технической конференции, посвященной 30-летию образования ЦНИИРЭС. Изд. АО «ЦНИИРЭС», 2001, часть 1, с.с.16-18.
7. Подповерхностная радиолокация. Под ред. М.И.Финкельштейна. М.: Радио и связь. 1994.
8. Check F.Lee and outhers. RCS Models and Analysis of Mines Proc. SPIE, Vol.3079, p.p.581-597.
9. Финкельштейн М.И Основы радиолокации. М.: Радио и связь. М, 1983, с.с.46,56.
10. Радиовидение. Учебное пособие. Под ред. Г.С.Кондратенкова. М.: Изд. ВВИА, 1998 г., с.с.26, 112, 127.
11. Радиолокационные станции с синтезированной апертурой антенны. Под ред. В.Т.Горяинова. М.: Радио и связь, 1988, с.с.19; 90.
12. Халкасон С. Преобразование Радона. М.: Мир, М., 1983.
13. Манукьян А.А. «Определение координат локальных неоднородностей на поверхности объекта по амплитудно-фазовой диаграмме обратного рассеяния». // Радиотехника и электроника. Журнал РАН, М.: Наука, том XXX. Вып. 2, 1985.
14. Описание к патенту РФ №22114161 с приоритетом от 18.06.2001 г., МПК7: G 01 S 13/90.
15. Справочник «Передовые технологии автоматизации». Краткий каталог продукции. М.: составитель справочника и поставщик продукции фирма ProSoft, адрес в Web - http://www. prosoft.ru; 1999, с.с.5, 24.
16. Профессиональное телевизионное, видео и аудио оборудование. Каталог фирмы ЗАО «Окно-ТВ». М.: 2001-2002, с.с.8, 88.
17. Титце У. Шенк К. Полупроводниковая схемотехника. М.: Мир, 1982, с.с.125-127, 369, 284-286.
18. Спутниковый радионавигационный комплекс СРНК-21ДВ Проспект МАКС-2003, г.Жуковский, ГУП «Пилотажно-исследовательский центр» ЛИИ им М.М.Громова, 2003.
19. Шевченко П.А. и др. Архитектура нейропроцессора NM 6403. Сборник докладов 5-й Всероссийской конференции «Нейрокомпьютеры и их применение». М., 1999 г., с.с.70-90).
20. Проектирование фазированных антенных решеток. Под ред. Д.И.Воскресенского. М.: Радиотехника», 2003.
21. Левитин В.И. и др. Состояние и перспективы развития приемо-передающих модулей и фрагментов решеток для ФАР. Труды научно-технической юбилейной конференции ЦНИИРЭС. М.: ЦНИИРЭС, часть 1. 2001, с.36.
22. Проспект МАКС-2003, г.Жуковский. Изд. ОАО НИИ Приборостроения и Государственного Рязанского приборного завода, 2003.
23. Радиолокационные станции воздушной разведки. Под ред. Г.С.Кондратенкова. М.: Воениздат. 1983 г., с.120.
24. Описание патента РФ №2099743 с приоритетом от 07.12.95 г., МПК6: G 01 S 13/89.
25. Канащенков А., Ратнер В., Курилкин В. Вертолетные БРЛС разработки «Фазотрон-НИИР», // Журнал «Вестник авиации и космонавтики», 2003 г., №4, с.26.
26. Сафронов Г.С., Сафронова А.П. Введение в радиоголографию. М.: Советское радио, 1973, с.187.
27. Херман Г. Восстановление изображений по проекциям. Основы реконструктивной томографии. М.: Мир. 1983.
28. Воронин Е.Н., Нечаев Е.Е., Шашенков В.Ф. Реконструктивные антенные измерения. М.: Наука, 1995.
29. Townsend D.W. and Defrise М. Image Reconstruction Methods inp Positron Tomography. - Lectures given in the Academic Training Programme ofCERN, Geneva, 1993.
30. Бесараб М.А.,. Кравченко В.Ф. Функции В.Л.Рвачева в задачах вычислительной томографии. // Зарубежная радиоэлектроника, №3, 2002.
31. Даджион Д., Мерсеро Р. Цифровая обработка многомерных сигналов. М.: Мир, 1988.
32. А.Н.Тихонов, В.Я.Арсенин, А.А.Тимонов. Математичекие задачи компьютерной томографии. М.: Наука, 1987.
33. Справочник по радиолокации. Под ред. М.Сколника, М.: 1976, т.1, с.204.
34. Грибков В.Ф. и др. Эмпирический алгоритм обработки радиолокационной информации. Сборник докладов на 5 Всероссийской конференции «Нейрокомпьютеры и их применение», М., 1999 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2323450C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
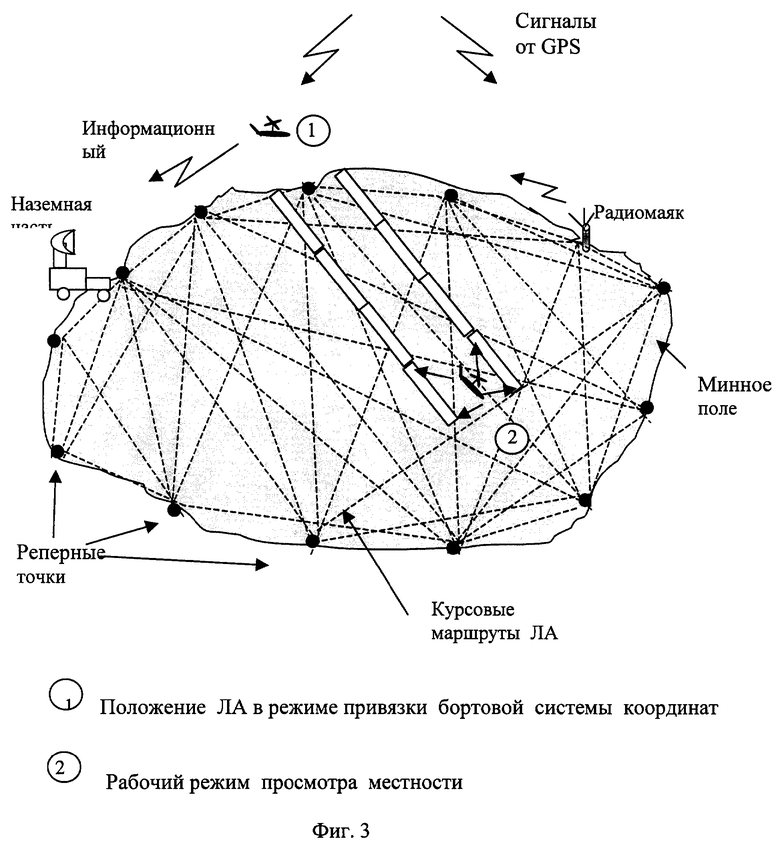
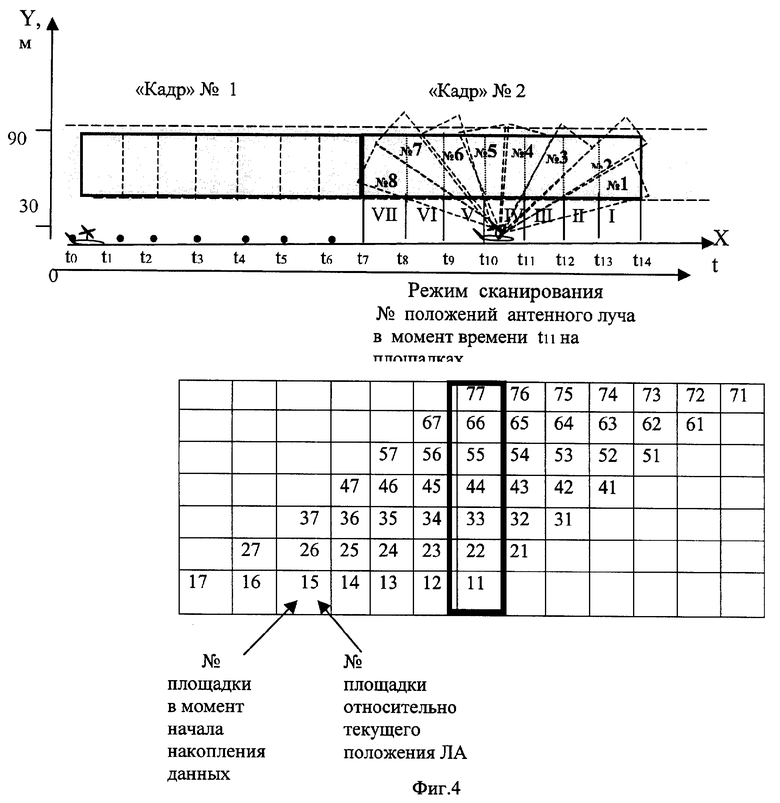
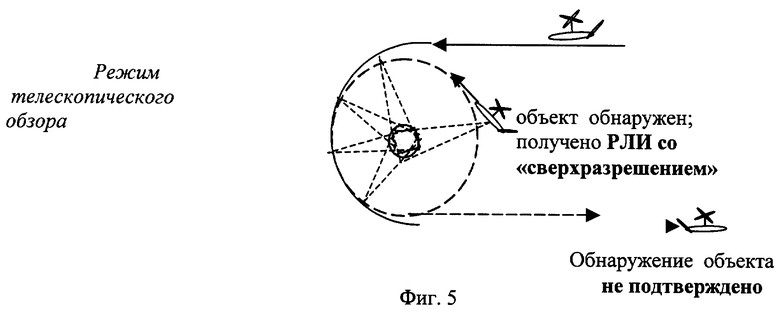
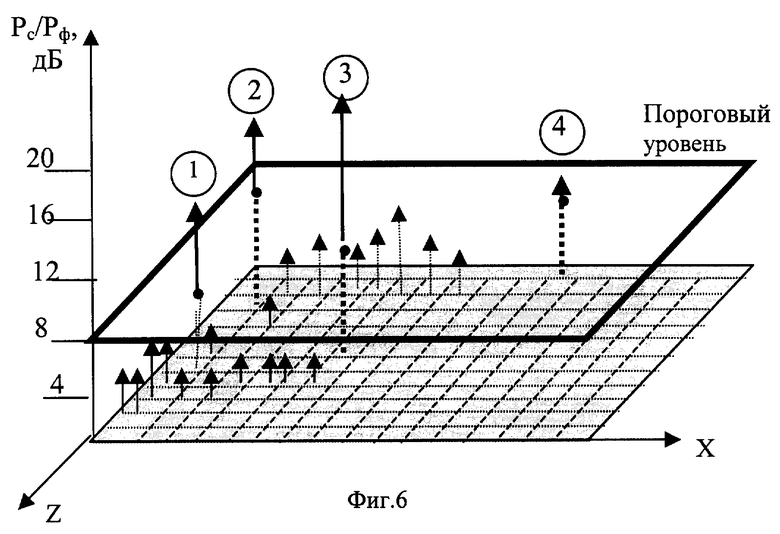
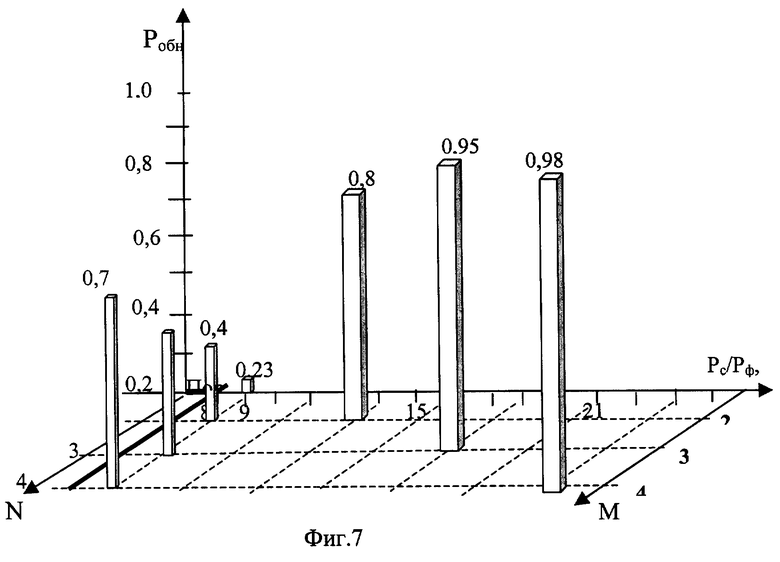
Предлагаемое изобретение относится к технике обследования, например, минных полей и может быть использовано для поиска, обнаружения и распознавания мин, закрытых слоем грунта. Сущность изобретения состоит в том, что в способе повышения радиолокационного разрешения, включающем получение отраженных сигналов при соответствующем обследовании поверхности, эти сигналы получают с помощью когерентного радиолокационного зондирования участков поверхности в определяемых шириной диаграммы направленности антенны секторах наблюдения (10-50)° под ракурсами обследования в диапазоне ±75°, полученные сигналы запоминают в виде соответствующих радиоизображений, после чего для каждого ракурса обследования формируют радиоизображения, соответствующие совокупности сигналов радиоизображений, получаемых по сечениям, параллельным направлению соответствующего ракурса обследования, в проекциях на плоскость, перпендикулярную этим направлениям, а затем производят Фурье-преобразование сформированных проекций радиоизображений, по совокупности которых для каждого участка с помощью метода реконструктивной вычислительной томографии, например преобразования Радона, формируют соответствующую суммарную квазиголограмму с последующим восстановлением по ней с помощью двухмерного обратного Фурье-преобразования радиоизображения соответствующих участков с увеличенным разрешением. Сущность изобретения состоит в том, что система дистанционного выявления малоразмерных объектов включает радиолокационный датчик, связанный с вычислительным устройством, своим выходом подключенным к индикатору, блок согласования, блок формирования радиолокационного изображения, классификатор, два блока памяти, блок определения координат, блок синхронизации, печатающее и радиопередающее и радиоприемное устройства, а также дополнительные индикатор и вычислительное устройство. Сущность изобретения состоит также в том, что в способе дистанционного выявления системой малоразмерных объектов, обследование подстилающей поверхности в зоне предполагаемого нахождения малоразмерных объектов, например в предполагаемом минном поле, производят при облете ЛА этого поля путем его сканирования с одновременным радиолокационным зондированием, например, в дециметровом диапазоне радиоволн с помощью сформированной на бортовой радиолокационной станции (РЛС) или установленных на борту ЛА радиолокационных датчиков (РЛД) синтезированной апертуры, а также путем пошагового дискретного поворота луча антенны на заданные углы в каждом предварительно выбранном элементарном интервале обследования и определением координат мест отражения соответствующих сигналов при каждом шаге поворота луча антенны РЛС в этих интервалах обследования, причем полученные при зондировании отраженные сигналы и координаты соответствующих участков подстилающей поверхности запоминают, а затем формируют соответствующие этим отраженным сигналам сигналы радиоизображения участков и соответствующих им координат обследованного поля. Достигаемым техническим результатом является возможность проведения бесконтактного поиска с высокой вероятностью обнаружения и распознавания малоразмерных объектов, например мин, и в том числе, заглубленных в грунт и соответственно замаскированных. 3 н. и 21 з.п. ф-лы, 7 ил.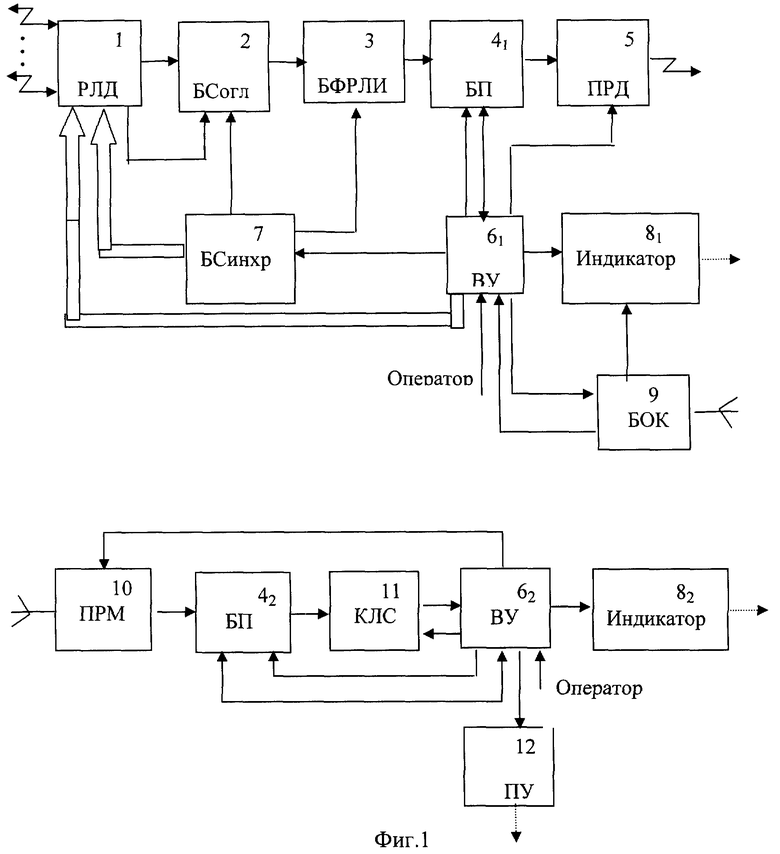
| ВЕЛЬЦЕР В | |||
| Аэроснимки в военном деле | |||
| - М.: Воениздат, 1990, с.51-53 | |||
| Стиральная машина для обработки колпаков валеной обуви | 1932 |
|
SU30439A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 1995 |
|
RU2096829C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| RU 93034497 А, 20.03.1997 | |||
| US 5361029 А, 01.11.1994 | |||
| US 4651152 А, 17.03.1987 | |||
| Наклонный судоподъемник для перевода из бьефа в бьев маломерных судов | 1982 |
|
SU1065530A2 |
| Способ получения дегидродиотолуиндига | 1932 |
|
SU38235A1 |

