Изобретение относится к автоматике, в частности к устройствам контроля и управления параметрами флотации. Важнейшими параметрами флотации являются плотность пульпы, объемное содержание воздуха в процентах (степень аэрированности) в пульпе и массовое количество в процентах твердой фракции (твердого) в пульпе [1]. Известно устройство для измерения плотности [2], содержащее в качестве чувствительного элемента буек, полностью погруженный в пульпу, измерительным элементом является тензометрический датчик. Недостатком устройства [2] является контроль только одного параметра пульпы - плотности, что в ряде конкретных случаев является недостаточным для управления процессом флотации.
Известно устройство [3], обеспечивающее измерение аэрированности пульпы. Устройство [3] содержит каналы измерения веса буйков в пульпе. Один канал измеряет вес буйка, помещенного в аэрированную пульпу, второй канал измеряет вес буйка, помещенного в деаэрированную (без примеси воздуха) пульпу.
Условия для измерения аэрированной и деаэрированной пульпы создаются в двух специальных устройствах - успокоителях, рассредоточенных в камере флотационной машины.
К недостаткам устройства [3] относятся неодинаковость изменения веса буйков ввиду налипания на них твердых фракций пульпы и каналов измерения для буйка аэрированной и деаэрированной пульпы, необходимость настройки двух каналов измерения веса буйков, а также то, что места измерения параметров аэрированной и деаэрированной пульпы разнесены в объеме флотационной машины. Прототипом предлагаемого изобретения является устройство [3]. В предлагаемом устройстве исключаются перечисленные недостатки устройства [3].
Это достигается тем, что в устройство [3] введены успокоитель с заслонкой, механизм перемещения, связанный посредством соединительной тяги с заслонкой успокоителя, микроконтроллер, оснащенный дисплеем и клавиатурой, модулями ввода и вывода, цифровым каналом связи, программными блоками, реализующими управление механизмом перемещения, вычисление плотности аэрированной и деаэрированной пульпы, степень аэрированности пульпы и массовую концентрацию твердого в пульпе. Предлагаемое устройство изображено на Рис.1, где обозначены:
1 - флотационная машина,
2 - пена,
3 - пульпа,
4 - аэратор,
5 - тензометрический датчик силы,
6 - измерительная тяга буйка,
7 - успокоитель,
7.1 - заслонка успокоителя,
8 - измерительный буек,
9 - заслонка,
10 - механизм перемещения,
11 - соединительная тяга заслонки,
12 - микроконтроллер,
12.1- дисплей микроконтроллера,
12.2 - клавиатура микроконтроллера,
12.3 - входной сигнал микроконтроллера,
12.4 - выходной управляющий сигнал микроконтроллера,
12.5 - цифровой канал связи микроконтроллера,
13 - выходной сигнал степени аэрированности пульпы,
14 - выходной сигнал массовой концентрации твердого.
Предлагаемое устройство работает циклически. Перед вводом в действие предлагаемого устройства осуществляются следующие процедуры:
тарировка измерительного канала - выходному сигналу тензометрического датчика силы 5 при подвешенной к нему измерительной тяге 6 и снятом буйке 8 путем нажатия на специально выделенную кнопку клавиатуры 12,2 присваивается (запоминается в микроконтроллере 12) условный нулевой сигнал;
калибровка измерительного канала - при подвешивании к измерительной тяге 6 эталонной гири выходному сигналу тензометрического датчика силы 5 путем нажатия на специально выделенную кнопку клавиатуры 12.2 присваивается (запоминается в микроконтроллере 12) сигнал, соответствующий значению веса эталонной гири;
определение веса Р измерительного буйка 8 - при подвешивании к измерительной тяге 6 измерительного буйка 8, находящегося в воздухе, осуществляется взвешивание буйка 8, и путем нажатия на специально выделенную кнопку клавиатуры 12.2 в микроконтроллере 12 запоминается вес буйка 8, и этот вес используется при вычислении плотности аэрированной и деаэрированной пульпы.
определение объема V6 измерительного буйка 8 - с этой целью буек 8 опускают в воду и производят взвешивание и запоминание веса буйка 8 в воде способом, аналогичным определению веса измерительного буйка 8 в воздухе. Измеренный вес буйка 8 в воде используется для вычисления его объема.
ввод констант в микроконтроллер 12 предназначается для использования их значений при вычислении измеряемых параметров, циклическом управлении механизма перемещения 10 и задании скорости передачи данных по цифровому каналу связи 12.5 микроконтроллера 12.
Константы, вводимые в микроконтроллер:
цикл работы устройства - Т, с
плотность твердого - ρтв, г/см3
плотность жидкости - ρж, г/см3
ускорение свободного падения (мировая константа) - g, м/с2 задержка измерения плотности после опускания соединительной тяги - τо, с
задержка измерения плотности после подъема соединительной тяги - τп, с
номер устройства - N, (0-255)
скорость передачи данных по цифровому каналу связи - бод
Формула для вычисления плотности ρа(д) аэрированной (деаэрированной) пульпы

где FT - сила натяжения измерительной тяги 6 измерительного буйка 8 - выходной сигнал тензометрического датчика силы 5, Р - вес измерительного буйка 8, Vб - объем измерительного буйка 8 во время погружения его в воду:

где ρводы - плотность воды, FТводы - сила натяжения измерительной тяги 6 при погружении измерительного буйка 8 в воду.
После ввода всех констант в микроконтроллер 12 предлагаемое устройство готово к использованию. Работает устройство следующим образом.
В исходном состоянии соединительная тяга 11 находится в верхнем положении, и нижняя часть успокоителя 7 открыта. Заслонка находится в вертикальном положении. Успокоитель 7 заполнен аэрированной пульпой. При включении питающего напряжения микроконтроллер 12 с установленной выдержкой времени выполняет измерение плотности аэрированной пульпы. После окончания измерения плотности аэрированной пульпы микроконтроллер 12 выдает управляющий сигнал на механизм перемещения 10, соединительная тяга 11 опускается и посредством заслонки 9 перекрывает нижнюю часть успокоителя 7, оставляя зазор для выпуска осаждающейся твердой фракции. Пузырьки воздуха, находящиеся в успокоителе 7, поднимаются вверх, и в успокоителе 7 остается деаэрированная пульпа. После этого с установленной задержкой производится измерение плотности деаэрированной пульпы. Затем с выхода микроконтроллера 12 подается управляющий сигнал на механизм перемещения 10 для подъема соединительной тяги 11 в верхнее положение, что вызывает открывание нижней части успокоителя 7, выпуск из него деаэрированной пульпы и наполнение его объема аэрированной пульпой. На этом цикл управления механизмом перемещения 10 заканчивается, и производится вычисление степени аэрированности пульпы γ и массовой концентрации С твердого в пульпе.
Степень аэрированности γ пульпы осуществляется по формуле:

ρа - плотность аэрированной пульпы, ρд - плотность деаэрированной пульпы. Массовая концентрация твердого вычисляется по формуле:

ρтв - плотность твердой фазы пульпы, находящейся в пульпе, ρж - плотность жидкой фазы пульпы.
Для передачи информации об измеренных параметрах на верхний уровень системы автоматизированного управления необходимо по цифровому каналу связи 12.5 задать номер устройства. На это обращение системы верхнего уровня предлагаемое устройство включает цифровой канал связи 12.5 и обеспечивает передачу информации об измеренных параметрах (плотности аэрированной и деаэрированной пульпы, степени аэрированности пульпы и массовой концентрации твердого в пульпе). Для передачи информации на внешние устройства контроля микроконтроллер 12 оснащен выходами 13 и 14, на которые из микроконтроллера 12 подаются сигналы степени аэрированности пульпы и массовой концентрации соответственно.
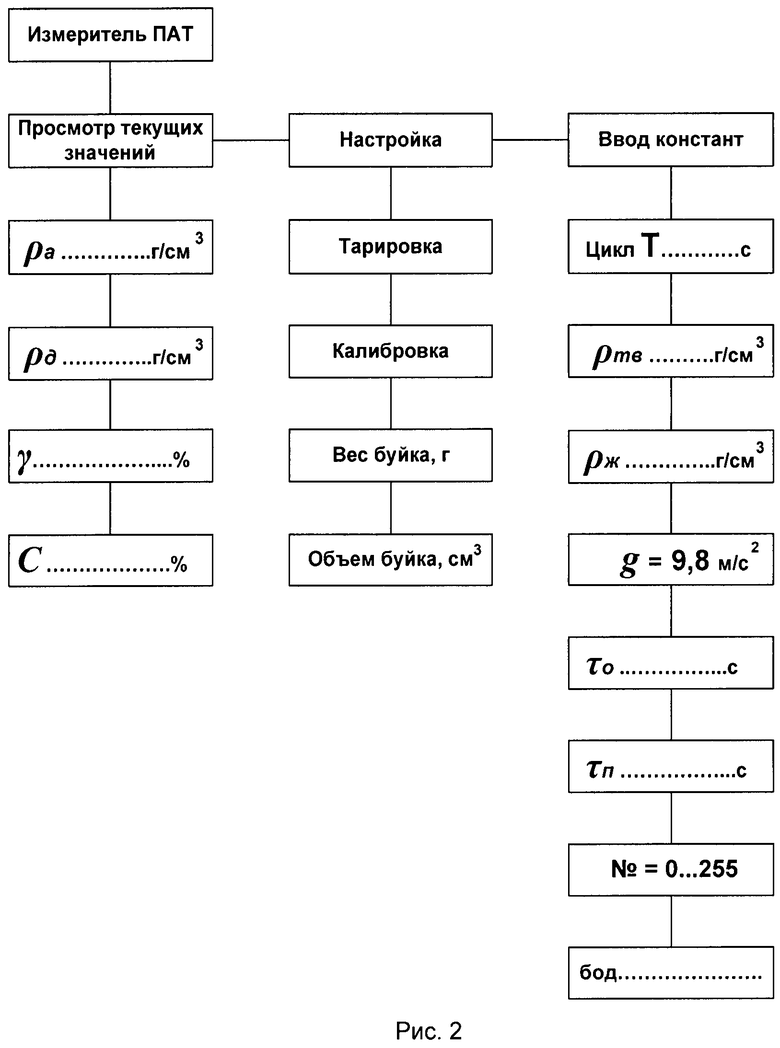
Технологическое программирование и использование по назначению Измерителя ПАТ осуществляется в соответствии с графом, представленном на Рис.2, в режиме МЕНЮ. Граф содержит ветви: «ПРОСМОТР ТЕКУЩИХ ЗНАЧЕНИЙ», «НАСТРОЙКА» и «ВВОД КОНСТАНТ». Перемещение по графу «вниз» осуществляется путем нажатия на первую выделенную клавишу клавиатуры 12.2 микроконтроллера 12, перемещение «вправо» осуществляется нажатием на вторую выделенную кнопку клавиатуры 12.2. Возврат в вершину ветви графа или в вершину графа осуществляется нажатием на третью выделенную кнопку клавиатуры 12.2 микроконтроллера 12.
В ветви «ПРОСМОТР ТЕКУЩИХ ЗНАЧЕНИЙ» графа путем последовательного нажатия на первую выделенную кнопку клавиатуры 12.2 на дисплее 12.1 микроконтроллера 12 просматриваются значения плотности аэрированной и деаэрированной пульпы, степени аэрированности пульпы в процентах и массовой концентрации твердого в пульпе в процентах.
В ветви «НАСТРОЙКА» графа путем нажатия на первую выделенную кнопку клавиатуры 12.2 последовательно выполняется тарировка, калибровка и вводятся в микроконтроллер 12 вес и объем буйка 8 указанным в настоящем тексте описания способом.
В ветви «ВВОД КОНСТАНТ» графа путем перемещения по этой ветви, набора вводимой константы и нажатия первой выделенной кнопки клавиатуры 12.2 микроконтроллера 12 осуществляется ввод: цикла Т работы устройства, плотности твердого, плотности жидкой фазы пульпы, ускорения свободного падения, задержки времени τо для измерения плотности после опускания соединительной тяги 11, задержки времени τп для измерения плотности после подъема соединительной тяги 11, номер устройства (один из 0-255), скорость передачи данных по цифровому каналу связи 12.5 (бод) микроконтроллера 12.
Таким образом, в предлагаемое устройство введены новые элементы - успокоитель 7, оснащенный заслонкой 9, соединительной тягой 11 и механизмом перемещения 10; микроконтроллер 12, оснащенный дисплеем 12.1, клавиатурой 12.2, аналоговым входом 12.3, дискретным выходом 12.4, цифровым каналом связи 12.5 и аналоговыми выходами 13 и 14 для вывода значений измеренных параметров, а также программными средствами, включающими программные блоки: Просмотр текущих значений, Настройка, Ввод констант, Вычисление плотности аэрированной и деаэрированной пульпы, Вычисление степени аэрированности пульпы, Вычисление массовой концентрации твердого в пульпе, Управление механизмом перемещения, Ввод аналогового сигнала, Вывод аналоговых сигналов, Вывод дискретного управляющего сигнала, Управление цифровым каналом связи.
Предлагаемое устройство является новым, полезным, технически реализуемым и соответствует критерию изобретения.
Литература
1. Сорокер Л.В. и др. Управление параметрами флотации. - М.: Недра, 1979, с.53-59.
2. Плотномер микропроцессорный весовой «Плотномер ТМ-1А», 2Е2.843.017.РЭ, Москва, ОАО «Союзцветметавтоматика», 2004 г.
3. RU 2432208 С1, 29.01.2010 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТЕПЕНИ АЭРИРОВАННОСТИ ПУЛЬПЫ В КАМЕРЕ ФЛОТАЦИОННОЙ МАШИНЫ | 2010 |
|
RU2432208C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕСОВОГО РАСХОДА И ВЕСОВОГО ДОЗИРОВАНИЯ ЖИДКИХ ФЛОТАЦИОННЫХ РЕАГЕНТОВ (ВЕСОВОЙ РАСХОДОМЕР/ДОЗАТОР ЖИДКОСТИ) | 2013 |
|
RU2537099C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЖИДКОСТИ В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548926C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ ЖИДКОСТИ В РЕЗЕРВУАРЕ | 1991 |
|
RU2033597C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ ЖИДКОСТИ | 2004 |
|
RU2273829C2 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРОВ | 2006 |
|
RU2327118C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ПУЛЬПЫ | 2018 |
|
RU2694448C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ | 1991 |
|
RU2047845C1 |
| Способ измерения массы жидкости в резервуаре произвольной конфигурации | 2021 |
|
RU2791960C2 |
| Система автоматического контроля содержания магнетита в пульпе | 2020 |
|
RU2746880C1 |
Изобретение относится к автоматизации технологического процесса флотации и может быть использовано для автоматического контроля технологических параметров процесса флотации - плотности, аэрированности пульпы и массовой концентрации твердого в пульпе. Устройство содержит измерительный буек, помещенный в успокоитель, который оснащен заслонкой в нижней его части. Измерительный буек подвешен к тензометрическому датчику силы, выход которого подключен на вход микроконтроллера. В устройство введен механизм перемещения, соединенный посредством тяги с заслонкой успокоителя. Механизм перемещения управляется микроконтроллером. Устройство работает циклически. Цикл работы начинается с измерения веса буйка при открытой нижней части успокоителя. При этом вычисляется плотность аэрированной пульпы, после чего заслонка под действием механизма перемещения закрывает нижнюю часть успокоителя, оставляя щель для выхода осаждающегося твердого. Пузырьки воздуха выходят из успокоителя и производится измерение веса буйка в деаэрированной пульпе, и вычисляется плотность деаэрированной пульпы. На основе значений плотности аэрированной и деаэрированной пульпы микроконтроллер проводит вычисление степени аэрированности пульпы - объемного количество воздуха в процентах в пульпе. Аналогично по соотвествующей формуле микроконтроллер осуществляет вычисление массовой концентрации твердого в пульпе. Информация о значениях плотности аэрированной и деаэрированной пульпы, а также степени аэрированности пульпы и массовой концентрации твердого в пульпе передается по цифровому каналу связи микроконтроллера на верхний уровень автоматизированной системы управления, а также в виде выходных аналоговых сигналов микроконтроллера на внешние приборы контроля. Управление устройством (просмотр текущих значений, настройка, ввод констант) осуществляется посредством дисплея и клавиатуры по графу в режиме «Меню». Техническим результатом является создание устройства для измерения плотности, степени аэрированности пульпы и массовой концентрации твердого в пульпе. 2 ил.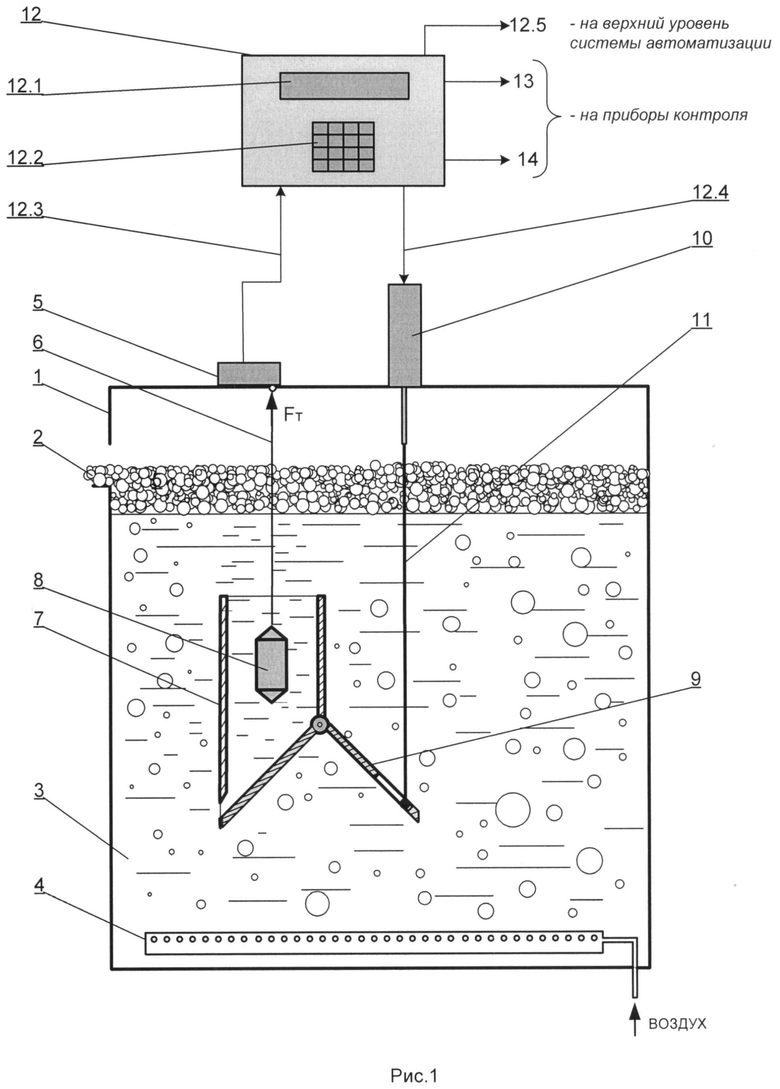
Устройство для измерения плотности, степени аэрированности пульпы и массовой концентрации твердого в пульпе, содержащее измерительный буек, помещенный в успокоитель, находящийся в пульпе; тензометрический датчик силы, соединенный с измерительным буйком тягой, вычислительное устройство, к входу которого подключен выход тензометрического датчика силы, отличающееся тем, что успокоитель оснащен заслонкой и введены механизм перемещения; соединительная тяга, одним концом подсоединенная к заслонке, а другим концом - к механизму перемещения; в устройство введен микроконтроллер, оснащенный дисплеем и клавиатурой, аналоговым входом, управляющим выходом, аналоговыми выходами и цифровым каналом связи, причем аналоговый вход микроконтроллера подключен к выходу тензометрического датчика силы, управляющий выход подключен к управляющему входу механизма перемещения, а аналоговые выходы микроконтроллера подключены к внешним приборам контроля; цифровой канал связи подключен к верхнему уровню системы автоматизации, при этом микроконтроллер оснащен программными блоками: Просмотр текущих значений, Настройка, Ввод констант, Вычисление плотности аэрированной и деаэрированной пульпы, Вычисление степени аэрированности пульпы, Вычисление массовой концентрации твердого в пульпе, Управление механизмом перемещения, Ввод аналогового сигнала, Вывод аналоговых сигналов, Вывод дискретного управляющего сигнала, Управление цифровым каналом связи.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТЕПЕНИ АЭРИРОВАННОСТИ ПУЛЬПЫ В КАМЕРЕ ФЛОТАЦИОННОЙ МАШИНЫ | 2010 |
|
RU2432208C1 |
| ПРИБОР ДЛЯ РАССМАТРИВАНИЙ ОТДАЛЕННЫХ СТЕРЕОПРОЕКЦИЙ | 1920 |
|
SU4546A1 |
| ЧАСЫ С РАЗРЕЗНЫМ РЕМЕШКОМ И ДЕКОРАТИВНЫЙ КОРПУС ЧАСОВ С УГЛУБЛЕНИЯМИ ДЛЯ РАЗРЕЗНОГО РЕМЕШКА | 2017 |
|
RU2660513C1 |
| СПОСОБ ПОЛУЧЕНИЯ ГОРЯЧЕГО ВОЗДУХА | 2002 |
|
RU2248509C2 |

