Область техники
Настоящее изобретение относится к новому способу идентификации и анализа устойчивых рассеивателей (PS) в последовательности цифровых изображений, полученных с помощью РЛС с синтезированием апертуры (SAR).
В частности, в нижеследующем для упрощения описания и без потери общности настоящее изобретение будет описано с конкретной ссылкой на изображения, полученные с помощью SAR, захваченные из космических систем SAR, с учетом того, что настоящее изобретение также можно применять к изображениям, полученным с помощью SAR, захваченных из авиационных или наземных систем SAR.
Уровень техники
Как известно, многопроходная спутниковая интерферометрия на основе РЛС с синтезированной апертурой (SAR) является очень эффективной технологией для измерения ландшафтных перемещений вследствие осадков, обвалов, землетрясений и вулканических явлений, описанной в P.A. Rosen, S. Hensley, I.R. Joughin, F.K. Li, S.N. Madsen, E. Rodriguez, R.M. Goldstein, Synthetic Aperture Radar interferometry, Proceedings of the IEEE, vol. 88, no. 3, pp. 333-382, March 2000, и в R. Bamler, P. Hartl, Topical Review: Synthetic Aperture Radar interferometry, Inverse Problems, vol. 14, pp. R1-R54, 1998.
В частности, многопроходная спутниковая SAR-интерферометрия основана на когерентном измерении земной поверхности посредством спутниковых (или авиационных или наземных) радиолокаторов, которые изображают земную поверхность с пространственным разрешением от одного метра до нескольких метров с помощью современных космических датчиков (меньшим для авиационных или наземных радиолокаторов). Объединение сигналов обратного рассеяния от всех источников в пределах каждого элемента разрешения дает амплитуду и фазу, связанные с элементом разрешения или пикселем в изображении, полученном с помощью SAR.
В частности, фазу единичного пикселя в изображении, полученном с помощью SAR, которое связано с участком местности в элементе разрешения, можно моделировать как сумму четырех составляющих:
первая составляющая ϕs - это фаза, связанная с механизмом рассеяния в данном элементе разрешения;
вторая составляющая ϕr связана с расстоянием r между датчиком и элементом разрешения и с длиной волны λ датчика, причем вторая составляющая ϕr определяется как ϕr=4πr/λ;
третья составляющая ϕa - это фаза, связанная с задержкой, вносимой атмосферой; и
четвертая составляющая ϕn - это остаток из модели, включающий в себя фазовый шум.
Учитывая в первом примере только составляющую фазы, связанную с рассеянием ϕs, и составляющую фазы, связанную с расстоянием между датчиком и элементом разрешения ϕr, если два изображения, полученные с помощью SAR, захватываются в разные моменты времени и с немного отличающимися углами наблюдения, и предполагая, что поведение рассеяния элемента разрешения идентично в двух захватах, разность фаз двух совместно зарегистрированных изображений, так называемая "интерферометрическая фаза", зависит от высоты элемента разрешения и от его смещений, поскольку член ϕs, обусловленный рассеивателем, уничтожается в разности. Цифровую модель рельефа (DEM) можно использовать для определения и удаления составляющей высоты рельефа из интерферометрической фазы и, таким образом, для получения ландшафтных смещений.
В принципе, дифференциальная интерферометрия позволяет измерять ландшафтные смещения в несколько миллиметров. Однако на точность и выполнимость измерений оказывают влияние различные источники ошибок, которые можно разделить на две группы: шум, в основном обусловленный декорреляцией между изображениями, полученными с помощью SAR в разных захватах, и систематические ошибки, обусловленные ограниченной точностью орбитальных данных и DEM, используемых при обработке, и разными атмосферными условиями на разные даты захвата.
В частности, шум декорреляции позволяет делать пригодные интерферометрические измерения только на разрозненном наборе точек, именуемых устойчивыми рассеивателями (PS), которые сохраняют корреляцию при разных захватах. PS обычно соответствуют элементам разрешения, в которых преобладающая составляющая сигнала обусловлена единичным, точечным и стабильным механизмом рассеяния в течение времени захватов. Эти механизмы рассеяния являются более частыми в присутствии зданий, инфраструктурных сооружений, скал и голой почвы.
Идентификация PS с последующим извлечением их движения (совместно с их точной высотой) из последовательности захватов SAR является основной проблемой интерферометрии на основе устойчивых рассеивателей (PSI).
Известный способ, именуемый способом постоянных рассеивателей и раскрытый в A. Ferretti, C. Prati and F. Rocca, Permanent scatterers in SAR interferometry, IEEE Trans. Geosci. Remote Sensing, vol. 39, no.1, pp. 8-20, Jan. 2001 и в A. Ferretti, C. Prati and F. Rocca, Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry, IEEE Trans. Geosci. Remote Sensing, vol. 38, pp. 2202-2212, Sept. 2000, с идеей минимизации дисперсий амплитуды и фазы в длинной последовательности изображений, полученных с помощью SAR, с максимальным разрешением дал новое понимание SAR-интерферометрии.
В частности, способ постоянных рассеивателей требует идентификации предварительного набора PS, выбранного согласно стабильности в разных захватах их амплитуды сигнала (т.е. модуля отражающей способности). Эти точки анализируются в связи с фазовой моделью для определения скорости перемещения PS (предполагается постоянной, т.е. перемещение линейно зависит от времени) и высоты (или, точнее, коррекции высоты по отношению к DEM, используемой для уплощения фазы) и для уточнения выбора PS.
Эти составляющие скорости и высоты затем вычитаются из фазы PS для определения фазовых остатков, которые содержат атмосферную составляющую, перемещение, нелинейно изменяющееся со временем, и другие немоделируемые составляющие, включающие в себя шум.
Затем можно отфильтровать атмосферную составляющую фазы, используя ее свойство пространственной корреляции (и отсутствия временной корреляции).
Затем атмосферные составляющие фазы, вычисленные на выбранных PS, можно использовать для оценки атмосферных составляющих фазы во всех точках путем локальных или глобальных (модельных) интерполяций или аппроксимаций.
Эти оценки можно вычитать из относительных изображений, которые снова можно обрабатывать для отыскания лучших высоты и скорости смещения и новых PS.
Эту процедуру можно повторять несколько раз для увеличения количества найденных PS.
В этом подходе принципиально важно калибровать данные как радиометрически, так и с точки зрения фазы. В частности, радиометрическая калибровка необходима для анализа дисперсии амплитуды сигнала, тогда как калибровка по фазе означает удаление орбитальных и атмосферных составляющих фазы, этап, необходимый не только для анализа, но и для идентификации всех возможных PS.
Сущность изобретения
Основной недостаток вышеупомянутого подхода состоит в том, что конечные результаты чувствительны к плотности и связности измерений, полученных на первых этапах обработки, и к ошибкам обработки, возникающим на этих первых этапах обработки, причем ошибки обработки более вероятны особенно в больших областях, где присутствуют изолированные или слабые устойчивые рассеиватели.
Кроме того, может случиться так, что в больших областях, где присутствуют изолированные или слабые устойчивые рассеиватели, не получены предварительные измерения.
Кроме того, вышеописанный подход требует моделей для атмосферных артефактов и истории деформации или последовательных уточнений.
Задача настоящего изобретения состоит в обеспечении способа идентификации устойчивых рассеивателей, который может преодолеть, по меньшей мере частично, вышеупомянутые недостатки.
Задача настоящего изобретения решается путем обеспечения способа идентификации устойчивых рассеивателей, заданного в прилагаемой формуле изобретения.
В частности, настоящее изобретение предусматривает способ идентификации устойчивых рассеивателей в цифровых изображениях, полученных с помощью РЛС с синтезированием апертуры (SAR), области земной поверхности, каждое из которых сделано в соответствующее время. Способ содержит обработку цифровых изображений, полученных с помощью SAR, для создания цифровых обобщенных дифференциальных интерферограмм.
Способ отличается тем, что дополнительно содержит этап, на котором анализируют свойства пар пикселей в цифровых обобщенных дифференциальных интерферограммах для идентификации отдельных пикселей, изображающих устойчивые рассеиватели.
Предпочтительно, на этапе анализа свойств пар пикселей в цифровых обобщенных дифференциальных интерферограммах анализируют свойства одних и тех же пар пикселей в цифровых обобщенных дифференциальных интерферограммах.
Краткое описание чертежа
Для лучшего понимания настоящего изобретения описаны предпочтительные варианты осуществления, которые приведены исключительно в порядке примера, но не ограничения, со ссылкой на прилагаемый чертеж (не в масштабе), на котором:
Фиг. 1 - схематичное изображение точек, идентифицированных как устойчивые рассеиватели (PS) или не PS, согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Нижеследующее рассмотрение представлено для того, чтобы специалист в данной области техники мог осуществить и использовать изобретение. Специалист в данной области техники может предложить различные модификации вариантов осуществления, не выходящие за рамки объема заявленного изобретения.
Таким образом, настоящее изобретение не ограничивается представленными вариантами осуществления, но подлежит рассмотрению в самом широком объеме, согласующемся с принципами и признаками, раскрытыми здесь и определенными в прилагаемой формуле изобретения.
Кроме того, настоящее изобретение реализуется посредством программного продукта, загружаемого в память электронного процессора и содержащего сегменты программного кода для реализации, когда программный продукт выполняется на электронном процессоре, и способа идентификации устойчивых рассеивателей, описанного ниже.
В нижеследующем для упрощения описания и без потери общности термины "точка(и)" и "пиксель(и)" будут использоваться как, по существу, взаимозаменяемые термины, а выражение "устойчивый(е) рассеиватель(и)" (или PS) будет использоваться как для устойчивого рассеивателя, изображенного пикселем (или устойчивых рассеивателей, изображенных пикселями), или для пикселя, изображающего устойчивый рассеиватель (или пикселей, изображающих устойчивые рассеиватели).
В частности, когда выражение "устойчивый(е) рассеиватель(и)" (или PS) будет использоваться в дальнейшем, верное значение между двумя вышеозначенными значениями, связанными с ним, можно будет однозначно истолковать на основании соответствующего контекста, в котором будет использоваться это выражение.
В общем случае способ, отвечающий настоящему изобретению, для идентификации и анализа устойчивых рассеивателей, который заявитель назвал способом пар устойчивых рассеивателей (PSP), использует только относительные свойства пар точек и очень общую модель сигнала SAR, позволяя лучше идентифицировать все устойчивые рассеиватели (PS) (также в областях, где они не очень плотны или отличаются тем, что перемещения не являются линейными функциями времени) и находить их перемещения и точные высоты (и, следовательно, также лучше определять местоположение).
В частности, способ PSP не требует ни модели для атмосферных артефактов, ни предварительного вычисления изображений, полученных с помощью SAR, и устойчив по отношению к плотности PS, найденной на предварительных стадиях.
Основной идеей способа PSP является идентификация и анализ PS, работающих только с парами точек ("дугами").
Поскольку пространственно коррелирующие возмущения аналогичным образом влияют на сигналы в двух соседних точках, работа с разностями фаз между близкими точками устраняет атмосферное и орбитальное составляющие фазы, тем самым исключая необходимость в предварительном вычислении данных.
В частности, согласно способу PSP последовательность N совместно зарегистрированных захватов SAR, т.е. N совместно зарегистрированных цифровых изображений, полученных с помощью SAR, где N>1, обрабатывается для создания обобщенных дифференциальных интерферограмм по отношению к эталонному, или опорному, изображению.
В частности, согласно настоящему изобретению обобщенная дифференциальная интерферограмма определяется как дифференциальная интерферограмма между эталонным (или опорным) изображением и совместно зарегистрированным изображением, полученным с помощью SAR, где эталонное изображение может быть (реальным) изображением, выбранным из N совместно зарегистрированных изображений, полученных с помощью SAR, или синтетическим опорным изображением. Когда эталонное изображение является реальным изображением, определение либо соответствует изображению одной из классических дифференциальных интерферограмм, либо может также включать в себя возможность "интерферограммы идентично нулевой фазы" эталонного изображения с самим собой.
В нижеследующем для упрощения описания и без потери общности выражения "обобщенная(ые) дифференциальная(ые) интерферограмма(ы)", "дифференциальная(ые) интерферограмма(ы)" и "интерферограмма(ы)" будут использоваться как, по существу, взаимозаменяемые выражения.
С каждой интерферограммой связаны перпендикулярная (пространственная) базовая линия B i (т.е. составляющая, перпендикулярная линии наблюдения) и разность по времени (или временная базовая линия) T i по отношению к эталонному изображению, где i-индекс, указывающий i-ю рассматриваемую интерферограмму.
Теперь, пусть δϕa,i-разность фаз между двумя точками, т.е. пикселями, в i-й рассматриваемой интерферограмме, которые идентифицируются дугой a, соединяющей их. Дуга a связана с разностью высот δha (a-остаточная разность высот, если DEM используется для уплощения фазы) и с разностью скоростей δva (скорость означает скорость вдоль линии наблюдения) между двумя точками, и δϕa,i можно смоделировать как:

где λ - длина волны, на которой получено (или сделано) N изображений, полученных с помощью SAR, α - известный параметр; εa,i-отклонение от модели, включающее в себя в основном тепловой и спекловый шум при ограниченной длине дуги a. Шум εa,i, по определению, мал для пар устойчивых рассеивателей (PSP), тогда уравнение (1) является очень полезным уравнением для выбора PSP получения остаточных разностей высот и скоростей δha и δva, связанных с дугой a.
Полезным параметром является временная или многозахватная когерентность γa, связанная с дугой a, определяемая как:

где wa,i - возможные весовые коэффициенты, выбранные согласно данному критерию (все они могут быть равны единице в простейшем случае или могут зависеть, например, от значений амплитуды захваченных изображений, полученных с помощью SAR, или могут быть выбраны согласно другим критериям).
В ряде случаев некоторые из параметров δha и δva могут считаться известными и поэтому оставаться фиксированными при максимизации в уравнении (2).
Обычно в литературе суммирование в многозахватной когерентности γa, заданной уравнением (2), производится по N - 1 интерферограммам, сформированным эталонным изображением со всеми остальными изображениями.
Напротив, заявитель указал, что интерферограммы идентично нулевой фазе эталонного изображения с самим собой также можно рассматривать при суммировании согласно определению (2) или, что эквивалентно данному определению (2), N обобщенных дифференциальных интерферограмм по отношению к внешнему синтетическому эталонному изображению нулевой фазы можно рассматривать при суммировании согласно определению (2). Можно видеть, что результаты, полученные применением предложенной модификации, теоретически более верны, тогда как, с количественной точки зрения, разности могут быть значительными, в частности, когда количество N доступных захватов не очень велико.
Предложенную модификацию определения (2) многозахватной когерентности γa можно также применять к аналогичным определениям многозахватной или временной когерентности на основании точек или дуг, которые используются в других способах на основе устойчивых рассеивателей (PS), например первоначально предложенных в вышеупомянутых работах A. Ferretti, C. Prati, and F. Rocca, Permanent scatterers in SAR interferometry, и A. Ferretti, C. Prati, and F. Rocca, Non-linear subsidence rate estimation using permanent scatterers in differential SAR interferometry, или тех, которые впоследствии будут разработаны другими исследователями.
Многозахватную когерентность γa, определенную согласно (2), можно использовать для измерения качества дуги a в качестве PSP посредством проверки дуг.
В частности, дуга проходит проверку дуг, если γa превышает данный порог. Используемый порог можно определять эмпирически или на основании моделей или аналитических выкладок. Однако алгоритм не зависит от типа используемой проверки дуг и можно использовать другие или более сложные проверки дуг, также включающие в себя анализ большего количества дуг.
Работа с дугами может потребовать значительно больше расчетов, чем анализ отдельных точек. Фактически для набора из P точек существуют (P-1)P/2 дуги для анализа.
В интересующем случае значимы только короткие дуги: даже рассматривая только М ближайших соседей каждой точки изображения, придется проверять не менее РМ/2 дуг, что может представлять собой все же очень большое количество, поскольку PS могут быть очень разрозненными и поэтому полезно, чтобы М было большой величиной.
Однако не обязательно анализировать все возможные дуги. Минимальный набор дуг, полезный для идентификации искомых точек, т.е. всех PS, выражается графом, образованным дугами, соединяющими каждый PS с несколькими (по меньшей мере, одним) из ближайших PS, и дугами, соединяющими каждую игнорируемую точку с несколькими (по меньшей мере, одним) из ближайших PS.
В общем случае граф может быть частично несвязным, если существуют разные кластеры PS, которые не могут быть соединены друг с другом, например, вследствие их чрезмерной удаленности друг от друга. Построение этого графа не является непосредственным (поскольку позиции PS не известны, но, наоборот, являются целью поиска).
Этот минимальный набор строится итерационно. В частности, PSP-анализ начинается с начального графа Р0 "затравочных" точек (или узлов) и дуг. Следуя философии работы только с дугами, затравочные точки и дуги можно находить, применяя проверку дуг к ограниченному набору дуг, соединяющих близко расположенные точки.
Этот начальный набор дуг может состоять из дуг, соединяющих только первые соседние пиксели. Однако этот выбор будет эффективен только в областях плотного расположения PS. Поэтому можно рассматривать дополнительные дуги, которые соединяют пиксель на сравнительно более значительных расстояниях. Для ограничения их количества эти дуги не должны быть слишком длинными (что объяснено при рассмотрении уравнения (1)), а должны соединять только наиболее "перспективные" точки, или кандидаты в PS.
Кандидаты в PS можно идентифицировать на основании индекса качества, полученного вычислением многозахватной когерентности γa, определенной согласно (2) для всех дуг между первыми соседними пикселями (например, индекс качества точки можно определить как максимальную многозахватную когерентность γa для дуг, приходящих в эту точку). Однако для выявления наиболее перспективных точек или точек-кандидатов можно рассматривать другие свойства пикселей также на основании их амплитуд.
Кроме того, можно идентифицировать разные наборы кандидатов в PS, применяя разные пороги к индексу качества. При более высоких порогах выбранные точки являются более разрозненными, но более надежными, и меньшее количество более длинных дуг между соседними пикселями позволяет соединять удаленные области. Затем искомый начальный ограниченный набор дуг, соединяющих близко расположенные точки, можно получить как объединение всех дуг между пикселями, которые соседствуют (не обязательно являясь первыми соседями) в разных наборах точек, соответствующих разным порогам.
Определив начальный набор дуг, к этим дугам можно применить проверку дуг, и те, которые прошли проверку дуг, будут формировать несколько отдельных графов, не связанных друг с другом. Графы, демонстрирующие нужные свойства, например данную мощность, т.е. количество узлов связного графа, или связность, т.е. минимальное количество дуг/узлов, удаление которых сделает граф несвязным, будут составлять начальный набор P 0.
Однако для выбора начального графа P 0 можно рассмотреть другие свойства и другие стратегии. Кроме того, выбор затравок не является очень важным вопросом, поскольку итерационный алгоритм построен таким образом, что результаты довольно нечувствительны к плотности начальных затравок. Однако следует обратить внимание на то, что P0 должен содержать в основном только "хорошие" точки, т.е. PS (хотя присутствие нескольких "плохих" точек, которые, при случае, можно отбросить на последующих этапах, не является критическим), и что затравки должны быть хорошо распределены, что может иметь большое значение, когда существуют разные кластеры PS, которые не могут быть соединены друг с другом вследствие их чрезмерной удаленности друг от друга.
На k-м этапе при k>0 Pk получается добавлением в Pk-1, по меньшей мере, еще одного PS. С этой целью дуги между PS, принадлежащими Pk-1, и точки, еще не включенные в этот граф, проверяются, обычно в порядке длины, и включаются в P k в зависимости от результатов проверок дуг. Таким же образом точку можно идентифицировать как не принадлежащую набору PS и больше не проверять.
Например, выбор можно производить на основании количества дуг, проходящих проверку дуг между новым узлом и графом P k-1. Напротив, если обнаружено, что данное количество дуг между узлом, не принадлежащим P k-1, и точками, уже включенными в P k-1, не проходит проверку дуг, этот узел больше не проверяется (пока не будут найдены дуги, более короткие, чем те, которые уже рассмотрены при последующих итерациях между узлом и некоторыми последовательно выбранными узлами).
Однако для включения или исключения точки из набора PS можно использовать другие проверки дуг и комбинации проверок дуг.
Итерации заканчиваются на этапе L, когда все точки проверены и идентифицированы как PS или не PS.
Вышеописанный итерационный выбор PS можно применять ко всему набору точек или к набору заранее выбранных точек (кандидатов в PS, определенных выше) для снижения вычислительной нагрузки.
В связи с вышеописанным итерационным выбором PS на фиг. 1 схематически показан минимальный набор дуг, который идентифицирует точки PS и не PS.
В частности, на фиг. 1 черные кружки изображают устойчивые рассеиватели (PS), идентифицированные согласно способу PSP, а белые кружки изображают точки, идентифицированные как не PS. Сплошные стрелки изображают дуги, прошедшие выбранную проверку дуг, а пунктирные стрелки изображают дуги, не прошедшие выбранную проверку дуг.
В примере, показанном на фиг. 1, выбранная проверка дуг требует, чтобы многозахватная когерентность γa одной дуги превышала данный порог. Это значит, что каждая точка проверяется один раз путем проверки многозахватной когерентности γa дуги между проверенной точкой и PS. В частности, если γa превышает данный порог, проверенная точка включается в набор PS, в противном случае она отбрасывается и вновь не проверяется (пока не будет найдена дуга, более короткая, чем та, которая уже рассмотрена при последовательных итерациях между проверенной точкой и некоторыми последовательно выбранными узлами). Однако обычно используются более сложные проверки дуг, например, требующие анализа более чем одной дуги между проверенной точкой и PS.
Кроме того, многозахватная когерентность γa, определенная в (2), также обеспечивает оценку остаточных разностей высот и скоростей δh a и δva, связанных с дугой a. Поэтому после выбора PS остаточные значения высоты и скорости на всех выбранных PS можно реконструировать путем "интегрирования" с точностью до аддитивной постоянной разностей δha и δva, вычисленных на наборе дуг, соединяющих PS.
Однако значения разностей δh a и δva, связанные с дугами, таковы, что значения, реконструированные в точках, зависят в общем случае от пути "интегрирования". Другими словами, решение является переопределенным (несмотря на то, что задано с точностью до аддитивной постоянной) и может определяться путем решения задачи оптимизации для минимизации согласно данной метрике и весовым коэффициентам, зависящим от надежностей дуг, остатков, соответствующих разным "определениям".
Благодаря этому переопределению и избыточности реконструированные остаточные значения скорости и высоты на всех выбранных PS устойчивее к ошибкам и менее зашумлены.
Затем для получения развития перемещения каждого из идентифицированных PS необходимо развернуть фазы всех интерферограмм. Реконструированные скорости и высоты устраняются согласно уравнению (1) из каждой интерферометрической фазы; остатки, в идеальном случае, не зависят от пространственных и временных базовых линий.
Остаточные фазы на разрозненном наборе выбранных точек можно развертывать, как описано в M. Costantini, A novel phase unwrapping method based on network programming, IEEE Trans. Geosci. Remote Sensing, vol. 36, pp. 813-821, May 1998, и в M. Costantini and P. Rosen, A generalized phase unwrapping approach for sparse data, in Proc. Int. Geosci. Remote Sensing Symp. (IGARSS), Hamburg, Germany, June 28-July 2 1999, pp. 267-269.
Кроме того, из развернутых остаточных фаз отфильтровываются атмосферные артефакты, отличающиеся медленной и быстрой изменчивостью в пространстве и времени, соответственно, для получения фаз, связанных с нелинейными по времени составляющими перемещений.
Наконец, развитие перемещения PS получается сложением постоянной скорости и нелинейных по времени составляющих перемещений.
При случае можно применять дополнительную фильтрацию на основании идеи, что ускорения перемещения не могут быть слишком высокими, как указано в M. Costantini, F. Minati, and L. Pietranera, A Curvature Based Method for Combining Multi-Temporal SAR Differential Interferometric Measurements, in Proc. of Fringe 2003 Workshop, Frascati, Italy, Dec. 2003.
После очистки фазы от атмосферных артефактов процесс, в принципе, можно повторить.
Из вышеизложенного непосредственно следует, что способ, отвечающий настоящему изобретению, для идентификации и анализа устойчивых рассеивателей в последовательностях изображений, полученных с помощью SAR, с максимальным разрешением, т.е. способ PSP, эффективно преодолевает проблемы, обусловленные орбитальными и атмосферными фазовыми артефактами, за счет использования их пространственной корреляции без использования модельных интерполяций или аппроксимаций.
В частности, способ PSP имеет особое преимущество, когда атмосферные артефакты или перемещения, подлежащие получению, не очень хорошо описываются моделями, используемыми в стандартном подходе PS.
Кроме того, способ PSP не предусматривает предварительную обработку для калибровки данных, менее чувствителен к плотности PS и позволяет лучше идентифицировать PS в природных ландшафтах и PS, отличающиеся нелинейными движениями.
Кроме того, способ PSP эффективен с вычислительной точки зрения и допускает высокую степень параллелизации.
Наконец, очевидно, что настоящее изобретение допускает многочисленные модификации и варианты, отвечающие объему изобретения, заданного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТИРОВАНИЕ ЦЕЛИ В ИЗОБРАЖАЕМОМ ПОСРЕДСТВОМ SAR МОРСКОМ РАЙОНЕ | 2008 |
|
RU2472174C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ ФАЗЫ ПРИ ИНТЕРФЕРОМЕТРИЧЕСКОЙ ОБРАБОТКЕ ИНФОРМАЦИИ ОТ КОСМИЧЕСКИХ СИСТЕМ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ЗЕМЛИ | 2016 |
|
RU2612322C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОГО КОНТРОЛЯ КАЧЕСТВА ТЕЛЕСКОПИЧЕСКИХ ОПТИЧЕСКИХ СИСТЕМ | 1992 |
|
RU2020446C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОГО КОНТРОЛЯ КАЧЕСТВА ТЕЛЕСКОПИЧЕСКИХ ОПТИЧЕСКИХ СИСТЕМ | 1992 |
|
RU2031387C1 |
| Способ получения интерферограмм контроля качества линз и объективов | 1991 |
|
SU1800302A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АНАЛИЗА ОБЛАСТИ, ПРЕДСТАВЛЯЮЩЕЙ ИНТЕРЕС, В ОБЪЕКТЕ С ИСПОЛЬЗОВАНИЕМ РЕНТГЕНОВСКИХ ЛУЧЕЙ | 2011 |
|
RU2575495C2 |
| СПОСОБ И СИСТЕМЫ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В КОГЕРЕНТНОМ ИЗЛУЧЕНИИ И УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ МОДИФИКАЦИИ МАТЕРИАЛОВ | 2018 |
|
RU2760694C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ КЛЕТКИ | 2014 |
|
RU2569730C1 |
| СПОСОБ СКАНИРУЮЩЕЙ ДИЛАТОМЕТРИИ И ДИЛАТОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2735489C1 |
| СПОСОБ ДИСТАНЦИОННОГО ДОСМОТРА БАГАЖА В КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА | 2016 |
|
RU2629914C1 |
Изобретение относится к способу идентификации и анализа устойчивых рассеивателей (PS) в последовательности цифровых изображений, полученных с помощью радиолокатора с синтезированием апертуры (SAR). Техническим результатом является повышение эффективности идентификации PS, снижение ошибок обработки цифровых изображений. Предложен способ идентификации PS в цифровых изображениях, полученных с помощью радиолокатора с SAR, области земной поверхности, каждое из которых сделано в соответствующее время. Способ содержит обработку цифровых изображений для создания цифровых обобщенных дифференциальных интерферограмм, при этом анализируют свойства пар пикселей в цифровых обобщенных дифференциальных интерферограммах для идентификации отдельных пикселей, изображающих PS. 3 н. и 11 з.п. ф-лы, 1 ил.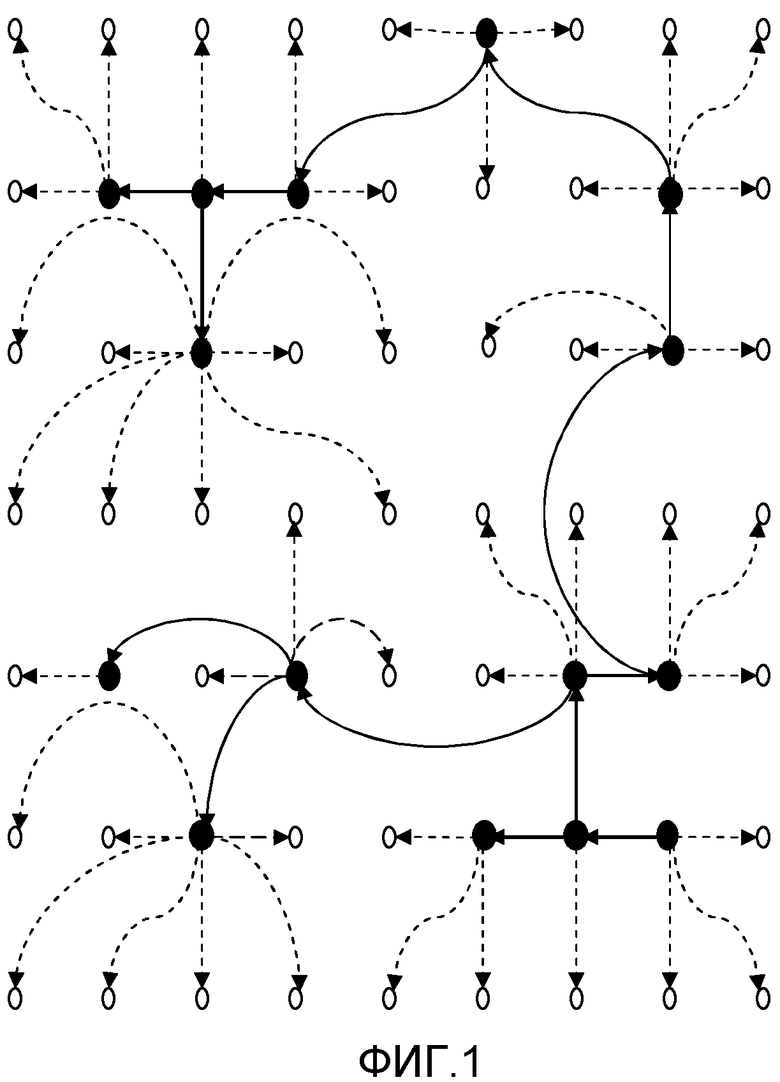
1. Способ идентификации устойчивых рассеивателей в цифровых изображениях радиолокатора с синтезированной апертурой (SAR изображениях), изображающих область земной поверхности в различные моменты времени, содержащий этапы, на которых
совместно регистрируют цифровые SAR изображения; и
обрабатывают совместно зарегистрированные цифровые SAR изображения для создания цифровых обобщенных дифференциальных интерферограмм относительно эталонного изображения, причем каждая цифровая обобщенная дифференциальная интерферограмма представляет собой дифференциальную интерферограмму между эталонным изображением и соответствующим совместно зарегистрированным цифровым SAR изображением, причем каждый пиксель в цифровой обобщенной дифференциальной интерферограмме указывает интерферометрическую фазу;
отличающийся тем, что дополнительно содержит этап, на котором
анализируют свойства пар близких пикселей в цифровых обобщенных дифференциальных интерферограммах для идентификации пикселей, изображающих устойчивые рассеиватели, при этом этап анализа включает в себя этапы, на которых
a) рассматривают пары близких пикселей в цифровых обобщенных дифференциальных интерферограммах;
b) вычисляют, для каждой рассматриваемой пары близких пикселей, соответствующие дифференциальные значения, связанные с фазой (δϕa,i), указывающие разности между интерферометрическими фазами упомянутых близких пикселей в цифровых обобщенных дифференциальных интерферограммах;
c) определяют, для каждой рассматриваемой пары близких пикселей, соответствующие значения, связанные с временной когерентностью (γa), на основе соответствующих дифференциальных значений, связанных с фазой (δϕa,i), соответствующего дифференциального значения, связанного с высотой (δha), и соответствующего дифференциального значения, связанного со скоростью (δva), причем соответствующее дифференциальное значение, связанное с высотой (δha), указывает разность между соответствующими высотами двух соответствующих точек на земной поверхности, которые изображаются упомянутыми близкими пикселями, причем упомянутое соответствующее дифференциальное значение, связанное со скоростью (δva), указывает разность между скоростями перемещения упомянутых двух соответствующих точек на земной поверхности; и
идентифицируют, среди пикселей, принадлежащих к рассматриваемых парам ближних пикселей, пиксели, изображающие устойчивые рассеиватели, на основе определенных значений, связанных с временной когерентностью (γa).
2. Способ по п.1, в котором упомянутый этап анализа свойств пар близких пикселей дополнительно включает в себя выбор начального набора пикселей в цифровых обобщенных дифференциальных интерферограммах,
причем упомянутый этап рассмотрения включает в себя рассмотрение начальных пар близких пикселей, принадлежащих к упомянутому начальному набору;
причем упомянутый этап вычисления включает в себя вычисление, для каждой начальной пары близких пикселей, соответствующих дифференциальных значений, связанных с фазой (δϕа,i),
причем упомянутый этап определения включает в себя определение, для каждой начальной пары близких пикселей, соответствующего значения, связанного с временной когерентностью (γa), на основе соответствующих дифференциальных значений, связанных с фазой (δϕa,i), соответствующего дифференциального значения, связанного с высотой (δha), и соответствующего дифференциального значения, связанного со скоростью (δva);
причем упомянутый этап идентификации включает в себя идентификацию, среди пикселей, принадлежащих начальному набору пикселей, пикселей, изображающих устойчивые рассеиватели, на основе значений, связанных с временной когерентностью (γa), определенных для начальных пар близких пикселей, тем самым формируя набор пикселей, изображающих устойчивые рассеиватели;
причем упомянутый этап рассмотрения включает в себя рассмотрение дополнительных пар близких пикселей в цифровых обобщенных дифференциальных интерферограммах, каждая дополнительная пара сформирована из соответствующего первого пикселя, принадлежащего к набору пикселей, изображающих устойчивые рассеиватели, и соответствующего второго пикселя, не принадлежащего к набору пикселей, изображающих устойчивые рассеиватели;
причем упомянутый этап вычисления также включает в себя вычисление, для каждой дополнительной пары близких пикселей, соответствующих дифференциальных значений, связанных с фазой (δϕa,i),
причем упомянутый этап определения также включает в себя определение, для каждой дополнительной пары близких пикселей, соответствующего значения, связанного с временной когерентностью (γa), на основе соответствующих дифференциальных значений, связанных с фазой (δϕa,i), соответствующего дифференциального значения, связанного с высотой (δha), и соответствующего дифференциального значения, связанного со скоростью (δva);
причем упомянутый этап идентификации также включает в себя:
идентификацию, среди вторых пикселей дополнительных пар близких пикселей, дополнительных пикселей, изображающих устойчивые рассеиватели, на основе значений, связанных с временной когерентностью (γa), определенных для дополнительных пар близких пикселей, и
добавление к набору пикселей, изображающих устойчивые рассеиватели, идентифицированных дополнительных пикселей.
3. Способ по п.1 или 2, в котором этап обработки совместно зарегистрированных цифровых SAR изображений для создания цифровых обобщенных дифференциальных интерферограмм включает в себя выбор эталонного изображения среди совместно зарегистрированных цифровых SAR изображений; при этом цифровые обобщенные дифференциальные интерферограммы содержат цифровую дифференциальную интерферограмму с идентично нулевой фазой, созданную на основании только эталонного изображения.
4. Способ по п.1 или 2, в котором эталонное изображение является синтезированным эталонным изображением.
5. Способ по п.1 или 2, в котором этап идентификации включает в себя определение, что данный пиксель изображает устойчивый рассеиватель, если значение, связанное с временной когерентностью (γa), определенное для пары пикселей, содержащей данный пиксель, отвечает первому критерию определения.
6. Способ по п.5, в котором определение, что данный пиксель изображает устойчивый рассеиватель, включает в себя определение, что данный пиксель изображает устойчивый рассеиватель, если значение, связанное с временной когерентностью (γa), определенное для пары близких пикселей, содержащей данный пиксель, выше первого порога определения.
7. Способ по п.1 или 2, в котором этап идентификации включает в себя определение, что данный пиксель изображает устойчивый рассеиватель, если значения, связанные с временной когерентностью (γa), определенные для пар близких пикселей, содержащих рассматриваемый пиксель, отвечают второму критерию определения.
8. Способ по п.7, в котором определение, что данный пиксель изображает устойчивый рассеиватель, включает в себя определение, что данный пиксель изображает устойчивый рассеиватель, если значения, связанные с временной когерентностью (γa), определенные для пар близких пикселей, содержащих данный пиксель, содержат некоторое количество значений, связанных с временной когерентностью (γa), превышающих соответствующие первые пороги определения, причем это количество превышает второй порог определения.
9. Способ по п.1 или 2, в котором соответствующее значение, связанное с временной когерентностью (γa), определенное для рассматриваемой пары близких пикселей, определяется согласно следующему определению:
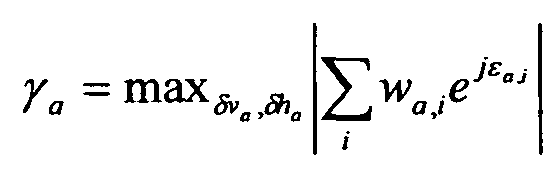
где а обозначает пару рассматриваемых близких пикселей, γa - соответствующее значение, связанное с временной когерентностью, δva - соответствующее дифференциальное значение, связанное со скоростью, δha - соответствующее дифференциальное значение, связанное с высотой, i - индекс, указывающий соответствующую i-ю рассматриваемую цифровую обобщенную дифференциальную интерферограмму среди цифровых обобщенных дифференциальных интерферограмм, wa,i - данный весовой коэффициент, выбранный согласно данному критерию взвешивания, и εa,i - величина, полученная обращением следующего уравнения:
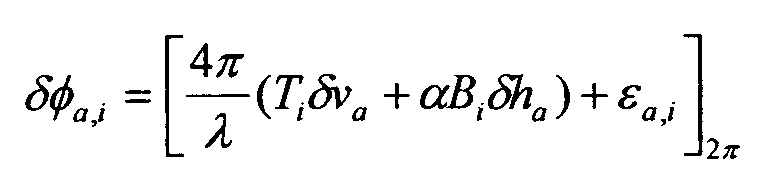
где δϕа,i - дифференциальное значение, связанное с фазой, указывающее разность между интерферометрическими фазами близких пикселей в i-й рассматриваемой цифровой обобщенной дифференциальной интерферограмме, λ - длина волны, на которой получены цифровые SAR изображения, Ti - временная базовая линия, связанная с i-й рассматриваемой цифровой обобщенной дифференциальной интерферограммой, α - известный параметр, и Вi - перпендикулярная пространственная базовая линия, связанная с i-й рассматриваемой цифровой обобщенной дифференциальной интерферограммой.
10. Способ по п.9, в котором данный весовой коэффициент, обозначенный wa,i, зависит от значений амплитуды в цифровых SAR изображениях.
11. Способ по п.1 или 2, дополнительно содержащий этапы, на которых
определяют значения, связанные с высотой, на основании дифференциальных значений, связанных с высотой (δha), на основании которых были определены значения, связанные с временной когерентностью (γa) для пар идентифицированных пикселей, причем каждое значение, связанное с высотой, связано с соответствующим идентифицированным пикселем и указывает высоту устойчивого рассеивателя на земной поверхности, причем устойчивый рассеиватель изображается соответствующим идентифицированным пикселем, и
определяют значения, связанные с постоянной скоростью, на основании дифференциальных значений, связанных со скоростью (δva), на основании которых были определены значения, связанные с временной когерентностью (γa), для пар идентифицированных пикселей, причем каждое значение, связанное с постоянной скоростью, связано с соответствующим идентифицированным пикселем и указывает постоянную скорость перемещения устойчивого рассеивателя на земной поверхности, изображаемого соответствующим идентифицированным пикселем.
12. Способ по п.11, дополнительно содержащий этапы, на которых
вычисляют остаточные фазы для идентифицированных пикселей на основании интерферометрических фаз идентифицированных пикселей, определенных значений, связанных с высотой, и определенных значений, связанных с постоянной скоростью,
развертывают вычисленные остаточные фазы,
отфильтровывают атмосферные артефакты из вычисленных остаточных фаз для получения нелинейных по времени составляющих перемещения устойчивых рассеивателей, изображенных идентифицированными пикселями, и
определяют перемещения устойчивых рассеивателей, изображенных идентифицированными пикселями, на основании определенных значений, связанных с постоянной скоростью, и нелинейных по времени составляющих перемещения.
13. Устройство обработки, выполненное с возможностью осуществления способа идентификации устойчивых рассеивателей по любому из пп.1-12.
14. Устройство памяти устройства обработки, содержащее сохраненный в нем программный код для осуществления, когда программный код выполняется на устройстве обработки, способа идентификации устойчивых рассеивателей по любому из пп.1-12.
| HOOPER A | |||
| еt al, A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers, Geophysical Research Letters, vol.31, 10 December 2004, abstract | |||
| DANIELE PERISSIN еt al, Repeat-pass SAR interferometry with partially coherent targets, Proceedings of Fringe 2007, Italy, 26 - 30 November 2007, |

