ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к детектированию цели в изображаемом посредством Радара с Синтезированной Апертурой морском районе.
УРОВЕНЬ ТЕХНИКИ
Как известно, дистанционное зондирование является наукой и методом получения информации об объекте, районе или явлении с помощью анализа данных, собранных устройством, которое не находится в контакте с исследуемыми объектом, районом или явлением. На основе длины волны, на которой работает система, дистанционное зондирование принципиально классифицируется по двум различным группам, т.е. оптическое и микроволновое.
Оптическое дистанционное зондирование использует видимую и инфракрасную волны, тогда как микроволновое дистанционное зондирование использует радиоволны.
Как и микроволновая система дистанционного зондирования, система Радара с Синтезированной Апертурой (SAR) содержит радарный передатчик сигнала и радарный приемник сигнала, работающие на подвижной платформе, например на самолете или спутнике, и удаленную станцию обработки, соединенную по радиоканалу с подвижной платформой.
Передатчик посылает радарный сигнал на контролируемый земельный участок или морской район, и приемник принимает радарное эхо, обратнорассеянное районом, и передает его на удаленную станцию обработки, которая обрабатывает радарное эхо, чтобы получить двумерную карту контролируемого района. Передаваемый радарный сигнал содержит последовательность электромагнитных импульсов микроволнового диапазона, линейно модулированных по частоте, или так называемых CHIRP, модулируемых и передаваемых с регулярными временными интервалами.
Станция обработки когерентно объединяет радарное эхо, соответствующее переданным импульсам, чтобы получить карты обширных районов с высоким разрешением по азимуту, используя относительно малые передающие антенны. Импульсная модуляция CHIRP, с другой стороны, обеспечивает достижение высокого разрешения перпендикулярно азимутальному направлению.
Более конкретно, система SAR облучает место микроволнами посредством передатчика и записывает как амплитуду, так и фазу обратнорассеянного излучения посредством приемника, выполняя его процесс формирования когерентных изображений. Принятый сигнал дискретизируется и преобразуется в цифровое изображение станцией обработки.
В частности поле, записанное в пикселе x, обозначаемое как E(x), может быть записано в виде
где суммирование производится по рассеивающим элементам s, a(s) и φ(s) являются соответственно, амплитудой и фазой сигнала, принятого от рассеивающего элемента s, и h(s,x) является аппаратной функцией или функцией рассеяния точки. Значение h(s,x) близко к 1, когда рассеивающий элемент s находится в или вблизи разрешаемой ячейки, соответствующей пикселю x, и вблизи нуля - в другом случае. Предполагая, что аппаратная функция является трансляционно-инвариантной, то есть она не зависит от x, она может быть записана как функция h(s-x) с одним параметром.
Квадрат модуля поля E(x) называется детектируемой интенсивностью I(x); квадратный корень из интенсивности I(x) называется огибающей или амплитудой. Это не то же самое, что и амплитуда принятого сигнала a(s), поскольку принимаемое поле E(x) искажается аппаратной функцией h(s,x). Амплитуда принятого сигнала a(s) называется отражательной способностью, а ее квадрат называется поверхностным поперечным сечением.
По сравнению с оптическим дистанционным зондированием формирование изображения SAR имеет некоторые преимущества. Во-первых, в качестве активной системы она является системой сбора данных и днем, и ночью. Во-вторых, рассматривая поведение электромагнитных волн в диапазоне длины волн SAR, можно видеть, что характеристики атмосферы, такие как облачность, небольшой дождь, туман и дым, мало влияют на возможности системы SAR. Это делает SAR всепогодной системой дистанционного зондирования. Наконец, хотя и не в последнюю очередь, поскольку сигналы SAR частично проникают в почву и растительный покров, в дополнение к поверхностной информации система SAR может предоставить также и информацию о слоях под поверхностью.
К сожалению, в сравнении с оптическим дистанционным зондированием формирование изображений SAR имеет также и некоторые недостатки. В частности, в отличие от оптических изображений изображения SAR формируются когерентным взаимодействием передаваемых микроволн с целями. Следовательно, формирование изображений SAR подвержено влиянию спекл-шума, который возникает от когерентного суммирования сигналов, обратнорассеянных рассеивающими элементами s земли, распределенными хаотично в пределах каждого пикселя x. Таким образом, изображение SAR оказывается более зашумленным, чем оптическое изображение.
Более подробно, волны, испускаемые передатчиком, распространяются в фазе и минимально взаимодействуют на своем пути до целевого района. После взаимодействия с целевым районом эти волны больше не находятся в фазе из-за различных расстояний, по которым они распространяются от целей, или при одном расстоянии, но при рассеянии с многократным отражением. При несовпадении по фазе обратнорассеянные волны могут взаимодействовать, создавая светлые и темные пиксели. Этот эффект известен как спекл-шум.
Спекл-шум дает зернистость изображений SAR, уменьшает контраст изображения SAR и негативно влияет на основанный на текстуре анализ. Кроме того, поскольку спекл-шум изменяет пространственную статистику изображений SAR, то он затрудняет классификационную обработку изображения.
Фиг.1 показывает пример типичного зернистого изображения SAR.
Поэтому спекл-шум обычно подавляется применением фильтра удаления спекла на цифровом изображении перед его отображением и дальнейшим анализом.
Фиг.2 показывает зернистое изображение SAR с Фиг.1, отфильтрованное фильтром удаления спекла.
Как показано на фиг.1, изображение SAR обычно отображается как серое масштабное изображение. Интенсивность I(x) каждого пикселя x представляет участок микроволны, обратно рассеянной соответствующим целевым районом на земле, участок которой зависит от разнообразных факторов: типов, размеров, формы и ориентаций рассеивающих элементов s в целевом районе, влагосодержания целевого района, частоты и поляризации радарных импульсов, а также углов падения радарного луча. Значения интенсивности пикселя часто преобразуются в физическую величину, называемую коэффициентом обратного рассеяния или нормированным поперечным сечением радара, которое измеряется в единицах децибелах (dB) со значениями, лежащими в диапазоне от +5 dB для очень ярких объектов до -40 dB для очень темных поверхностей.
Интерпретация изображения SAR не является простой задачей. Очень часто при этом требуется некоторая информация о состояниях земли изображаемых районов. Практически полезное правило заключается в том, что чем больше интенсивность обратного рассеяния, тем более шероховатой является изображаемая поверхность.
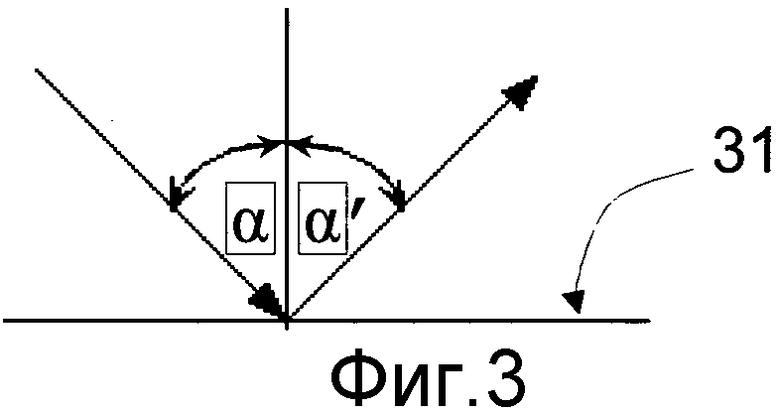
Точнее, плоские поверхности, такие как мощеные дороги, взлетно-посадочные полосы или спокойная вода, обычно проявляются как темные районы на изображении SAR, поскольку большая часть падающих радарных импульсов зеркально отражается от них. Фиг.3 схематично показывает пример зеркального отражения. Точнее, как показано на фиг.3, гладкая поверхность 31 действует подобно зеркалу для падающего радарного импульса. Большая часть падающей радарной энергии отражается согласно закону зеркального отражения, то есть угол отражения α' при этом равен углу падения α. Очень малая часть энергии обратно рассеивается на датчик SAR.
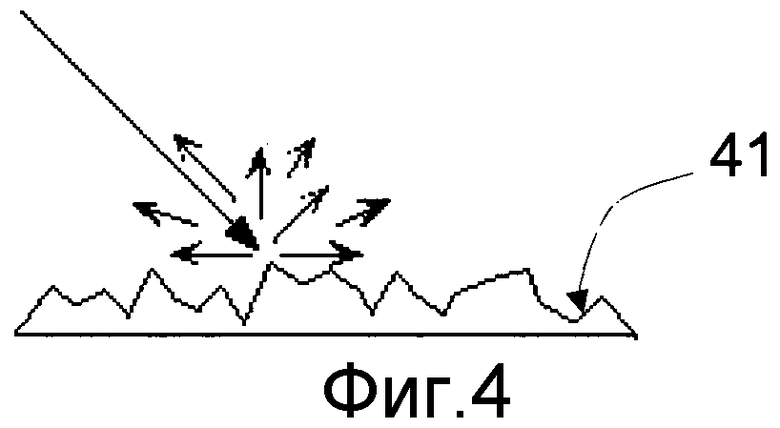
И напротив, шероховатая поверхность отражает падающий радарный импульс во всех направлениях. Это явление называется диффузным отражением. В этом случае, часть радарной энергии обратно рассеивается на радарный датчик. Величина обратно рассеянной энергии зависит от свойств цели на земле. Фиг.4 схематично показывает пример диффузного отражения при наличии шероховатой поверхности 41.
Поэтому спокойные морские поверхности кажутся темными в изображениях SAR, тогда как поверхности с некоторым волнением могут казаться яркими, особенно когда угол падения мал и когда шероховатость морской поверхности обусловлена волнами, имеющими длину волны, меньшую длины волны радарных импульсов.
Кроме того, морскую поверхность сглаживает присутствие нефтяных пленок. При определенных условиях, когда морская поверхность достаточно шероховата, нефтяные пленки могут быть детектированы как темные пятна на ярком фоне.
Кроме того, деревья и другие растения обычно умеренно шероховаты относительно длины волны. Следовательно, они проявляются как умеренно яркие особенности изображения. Тропические дождевые леса имеют характеристический коэффициент обратного рассеяния между -6 и -7 dB, который пространственно однороден и остается стабильным во времени. Поэтому тропические дождевые леса использовались как калибровочные цели при выполнении радиометрической калибровки изображений SAR.
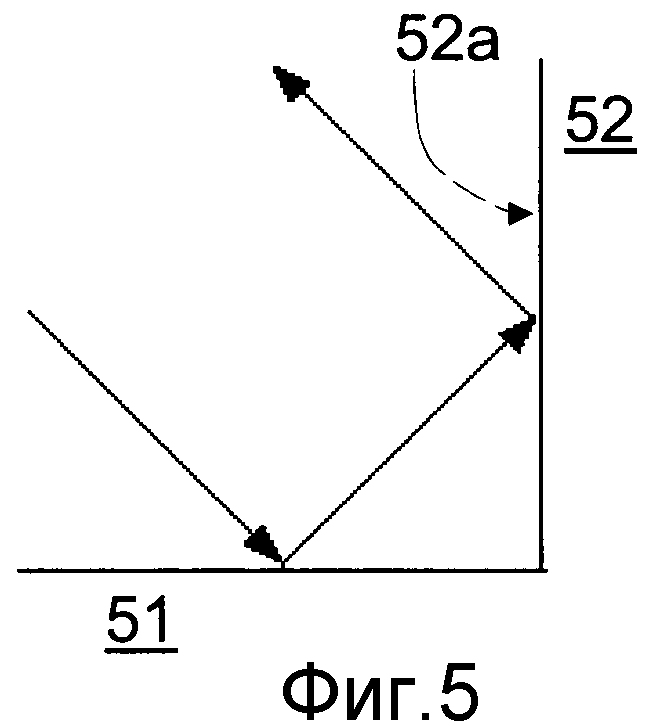
Очень яркие цели могут проявиться в изображении SAR вследствие явления, называемого угловым отражением или эффектом двукратного отражения. Фиг.5 схематично показывает пример эффекта двукратного отражения, когда радарный импульс отражается от горизонтальной поверхности земли 51 к цели 52 и затем отражается от одной вертикальной поверхности 52a цели 52 обратно на датчик SAR. Примерами таких целей являются суда в море, высотные здания и металлические объекты правильной формы, например грузовые контейнеры. Районы застройки и многие искусственные конструкции обычно проявляются как яркие пятна на изображении SAR вследствие эффекта углового отражения.
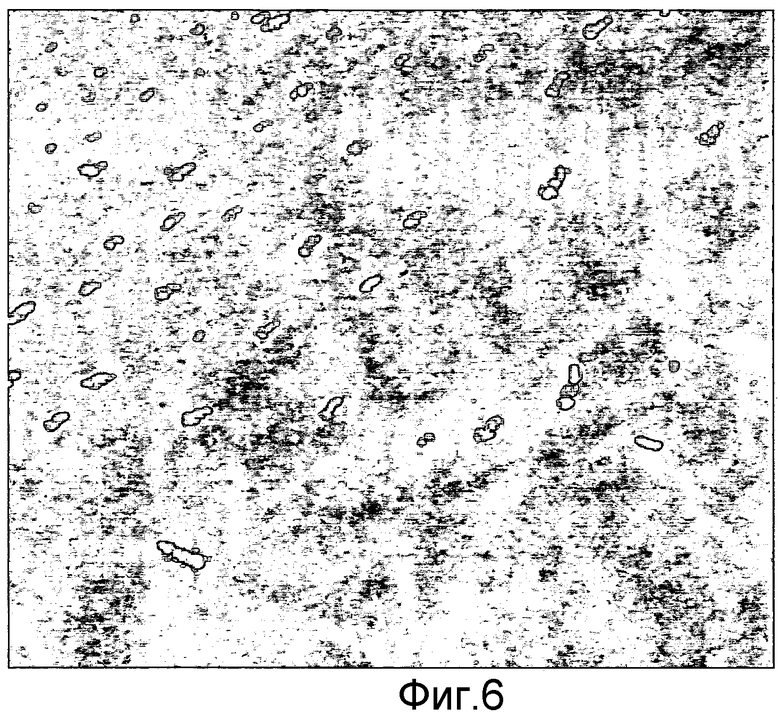
Фиг.6 показывает изображение SAR района моря вблизи оживленного порта, в котором многие суда могут быть видны как яркие пятна вследствие эффекта углового отражения. Море спокойно и, следовательно, суда могут быть легко детектированы на темном фоне.
Наконец, яркость районов, покрытых оголенной почвой, может варьироваться от очень темного до очень яркого в зависимости от ее шероховатости и влагосодержания. Как правило, шероховатая почва оказывается яркой на изображении. Для подобной шероховатости почвы поверхность с более высоким влагосодержанием будет казаться более яркой.
Фиг.7 схематично показывает пример взаимодействия радарного импульса с сухой почвой 71, причем часть падающей радарной энергии способна проникнуть в поверхность 71a почвы, приводя к меньшей интенсивности обратного рассеяния.
Фиг.8 схематично показывает пример взаимодействия радарного импульса с влажной почвой 81, причем большое различие электрических свойств между водой и воздухом приводит к более высокой интенсивности обратно рассеянного радарного излучения.
Фиг.9 схематично показывает пример взаимодействия радарного импульса с затопленной почвой 91, причем радарные импульсы зеркально отражаются от водной поверхности 92, приводя к малой интенсивности обратного рассеяния. Затопленный район будет казаться темным на изображении SAR.
ПРЕДМЕТ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Заявитель заметил, что в изображениях SAR спекл-шум сильно скоррелирован с полезным сигналом и, таким образом, любой процесс снижения/удаления спекл-шума также модифицирует и полезные характеристики сигнала.
Поэтому Заявитель выполнил всестороннее исследование, чтобы разработать инновационный способ детектирования целей в изображаемом посредством SAR морском районе, который не нуждается в какой-либо предварительной обработке изображения SAR, например в снижении или удалении спекл-шума и, кроме того, в любом априорном знании состояний земли визуализируемого морского района.
Целью настоящего изобретения, таким образом, является предоставление способа детектирования цели в изображаемом посредством SAR морском районе вышеупомянутого типа.
Эта цель достигается настоящим изобретением тем, что оно относится к способу, системе, устройству и программе системы программного обеспечения для детектирования цели, например судна, нефтяной пленки, айсберга, полузатопленной конструкции или любого другого возможного объекта, в изображаемом посредством SAR морском районе, как определено в приложенной формуле.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения, предпочтительные варианты осуществления, которые служат исключительно примером и не должны рассматриваться как ограничение, будут описаны ниже со ссылкой на приложенные чертежи (все приведены не в масштабе), на которых:
Фиг.1 показывает типичное зернистое изображение SAR;
Фиг.2 показывает изображение SAR из фиг.1, отфильтрованное фильтром удаления спекла;
Фиг.3 схематически показывает пример зеркального отражения;
Фиг.4 схематически показывает пример диффузного отражения;
Фиг.5 схематически показывает пример эффекта двукратного отражения;
Фиг.6 показывает изображение SAR моря;
Фиг.7 схематически показывает пример взаимодействия радарного импульса с сухой почвой;
Фиг.8 схематически показывает пример взаимодействия радарного импульса с влажной почвой;
Фиг.9 схематически показывает пример взаимодействия радарного импульса с затопленной почвой;
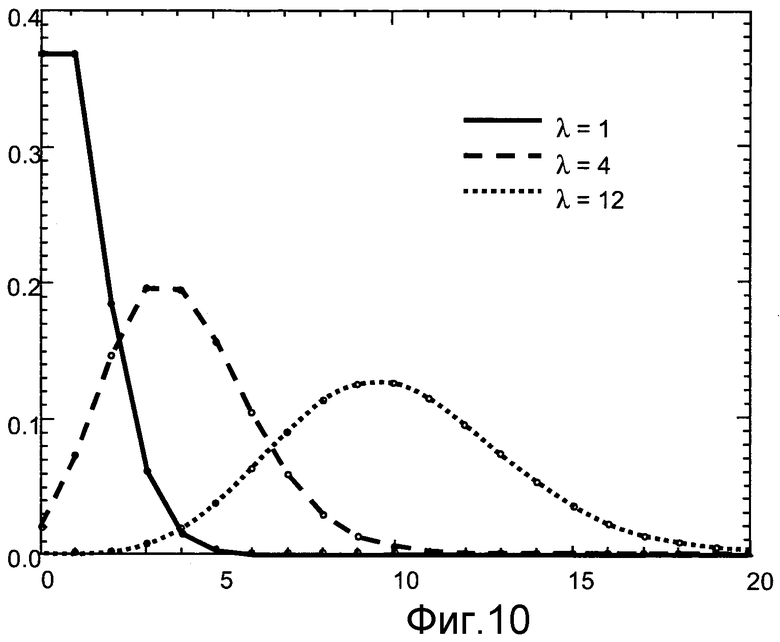
Фиг.10 показывает графические представления функций Пуассона для распределения вероятности дискретной величины;
Фиг.11 показывает гистограмму характеристик пикселей в типичном изображении SAR морского района, когда цель отсутствует;
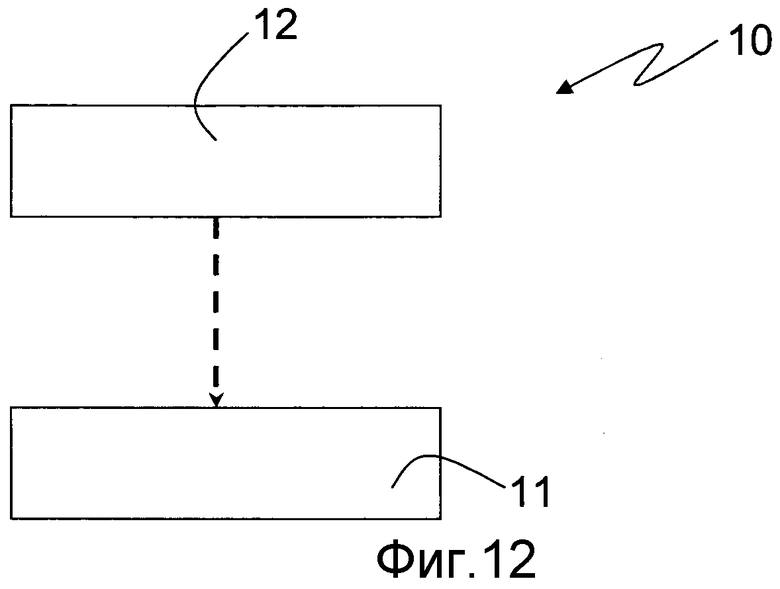
Фиг.12 схематически показывает систему для детектирования цели в изображаемом посредством SAR морском районе в соответствии с настоящим изобретением; и
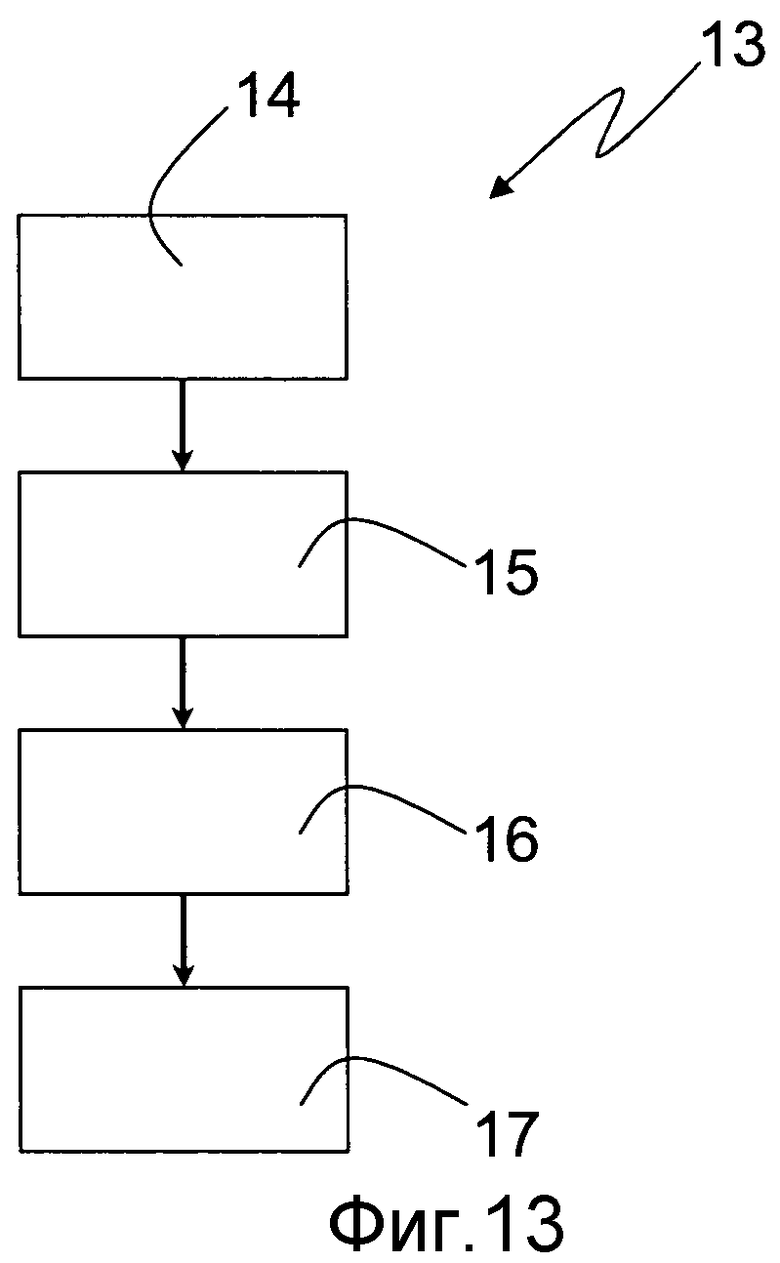
Фиг.13 показывает блок-схему последовательности операций способа детектирования цели в изображаемом посредством SAR морском районе в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Нижеследующее рассмотрение представлено, чтобы позволить специалисту в данной области техники реализовать и использовать изобретение. Различные модификации вариантов осуществления будут очевидны специалистам в данной области техники без отступления от объема заявленного настоящего изобретения.
Таким образом, настоящее изобретение не ограничивается только приведенными вариантами осуществления, но соответствует тому объему притязаний, который следует из раскрытых здесь принципов и признаков и который определен в приложенной формуле.
Кроме того, настоящее изобретение реализуется посредством программы системы программного обеспечения, загружаемой в память электронного процессора и содержащей кодовые участки программного обеспечения для реализации, когда программа системы программного обеспечения работает на процессоре, детектирования цели в изображаемом посредством SAR морском районе, описанном ниже.
Настоящее изобретение возникло из сделанного Заявителем наблюдения того, что в изображении SAR морского района, когда цель отсутствует, характеристики пикселей распределены в соответствии с распределением Пуассона. Характеристика может быть значением интенсивности, коэффициентом обратного рассеяния или любым другим типом характеристики пикселя, используемого в формировании изображения SAR.
Соответственно, вероятность P(I) характеристики I дается следующей функцией Пуассона для распределения вероятности дискретной величины:
причем λ является ожидаемым значением или средним значением характеристики I. Очевидно, e является основанием натурального логарифма, тогда как I! является факториалом характеристики I.
Как легко понять, заданием среднего значения λ однозначно идентифицируются функция Пуассона для распределения вероятности дискретной величины и затем распределение Пуассона характеристики I.
Как известно, для распределения Пуассона дисперсия σ2 и ожидаемое значение λ совпадают, то есть имеем
σ2 = λ.
Очевидно, что стандартное отклонение σ равно √λ.
Кроме того, мода для распределения Пуассона, то есть статистически наиболее вероятное значение или статистически наиболее часто встречающееся значение, равна λ-1, если λ является целым числом, или в другом случае - λ.
Фиг.10 показывает графическое представление трех функций Пуассона для распределения вероятности дискретной величины, каждая из которых имеет соответственное среднее значение λ.
Фиг.11 показывает гистограмму характеристик типичного изображения SAR морского района, когда цель отсутствует. В частности, ось абсцисс представляет коэффициенты обратного рассеяния, измеренные в децибелах (dB), а ось ординат представляет нормированные значения наступления события, то есть значения наступления события, разделенные на наибольшее значение наступления события. Как показано на Фиг.11, коэффициенты обратного рассеяния распределены в соответствии с распределением Пуассона, характеризующимся средним значением в 5 dB и моды в 4dB.
Фиг.12 схематично показывает электронную систему 10 для детектирования цели в изображаемом посредством SAR морском районе в соответствии с настоящим изобретением.
Подробнее, электронная система 10 содержит электронный процессор 11, связанный с системой 12 SAR, для сбора из нее данных. В частности, данные, собранные из системы 12 SAR, являются изображениями SAR, представляющими морские районы.
Кроме того, на электронном процессоре 11 устанавливается программа системы программного обеспечения, содержащая кодовые участки программного обеспечения для реализации детектирования цели в изображаемом посредством SAR морском районе, описанном ниже.
Фиг.13 показывает блок-схему последовательности операций способа детектирования 13 цели в морском районе, представленном изображением SAR в соответствии с настоящим изобретением.
В частности, детектирование 13 цели содержит:
расчет опорной величины (блок 14);
выбор пикселей в изображении SAR (блок 15);
расчет реальной величины (блок 16); и
детектирование (блок 17) цели в морском районе.
Подробнее, расчет опорной величины (блок 14) содержит расчет опорной величины, характеризующей распределение Пуассона, предполагаемое для характеристик, которые пиксели имели бы на изображении SAR, если бы морской район была свободен от целей.
Другими словами, расчет опорной величины (блок 14) содержит оценку среднего значения Ī характеристик I пикселей на изображении SAR, причем изображение SAR составлено из M×N пикселей и представляет морской район. Соответственно, опорная величина является оцененным средним значением Ī.
Более подробно, среднее значение Ī оценивается в соответствии со следующей формулой:
при этом I(i, j) является характеристикой пикселя (i, j).
В соответствии с идеологией, лежащей в основе настоящего изобретения, если нет никакой цели, например судна, нефтяной пленки, айсберга, полузатопленной конструкции или любого другого возможного объекта, в морском районе, представленном M×N пикселями, характеристики I M×N пикселей должны быть распределены в соответствии с нецелевым опорным статистическим распределением, которое является распределением Пуассона, характеризующимся ожидаемым значением, равным оцененному среднему значению Ī. Соответственно, нецелевая опорная вероятность P(I) характеристики I дается следующей функцией Пуассона для распределения вероятности дискретной величины:
Поэтому характеристика, которая встречается наиболее часто, то есть мода I* нецелевого опорного статистического распределения, равна Ī-1, если Ī является целым числом, или в другом случае - Ī.
Соответственно, стандартное отклонение σ нецелевого опорного статистического распределения равно √Ī.
Затем, выбор пикселей в изображении SAR (блок 15) содержит выбор подизображения в изображении SAR, подизображение составлено из m×n пикселей, причем m≤М и n≤N, и представляет соответствующий морской подрайон в морском районе.
Существенно то, что выбор пикселей в изображении SAR (блок 15) может быть выполнен обычным образом, используя окно выбора, подвижное внутри изображения SAR и содержащее m×n пикселей.
Кроме того, расчет реальной величины (блок 16) содержит расчет реальной величины, характеризующей реальное статистическое распределение характеристик выбранных пикселей.
Подробнее, расчет реальной величины (блок 16) содержит этапы, на которых:
рассчитывают гистограмму характеристик I выбранных пикселей, гистограмму, представляющую реальное статистическое распределение характеристик I выбранных пикселей; и
идентифицируют на гистограмме значение I M характеристики, которое встречается наиболее часто и которое представляет моду реального статистического распределения.
Соответственно, реальная величина является идентифицированной модой.
Кроме того, детектирование (блок 17) содержит этапы, на которых:
сравнивают нецелевое опорное статистическое распределение с реальным статистическим распределением, и
детектируют цель, такую как судно, нефтяная пленка, айсберг, полузатопленная конструкция или любой другой возможный объект, в морском подрайоне, представленном выбранными пикселями на основе сравнения.
В частности, сравнение учитывает ошибку зондирования, причем ошибка зондирования возникает из-за неидеального устройства системы зондирования, то есть системы SAR, и по многим другим причинам, таким как Доплеровский сдвиг из-за относительного движения подвижной платформы SAR и возможных целей на морской поверхности.
Подробнее, сравнение предполагает рассматривать нецелевое опорное статистическое распределение и реальное статистическое распределение как эквивалентные, если соответственные моды I* и I M различаются меньше, чем на порог T детектирования, представляющий ошибку зондирования, тогда как сравнение не предполагает рассматривать нецелевое опорное статистическое распределение и реальное статистическое распределение как эквивалентные и, следовательно, цель, которая должна быть детектирована в морском подрайоне, представленном выбранными пикселями, если соответственные моды I* и I M различаются больше, чем на порог T детектирования, представляющий ошибку зондирования.
Более подробно, нецелевое опорное статистическое распределение и реальное статистическое распределение рассматриваются как эквивалентные, если результатом является то, что
I*-I M ≤T,
тогда как нецелевое опорное статистическое распределение и реальное статистическое распределение не рассматриваются как эквивалентные и, следовательно, цель детектируется в морском подрайоне, представленном выбранными пикселями, если результатом является то, что
I*-I M >T.
Обычно порог T детектирования может быть установлен равным σ/3.
Обычно ошибка зондирования, представленная порогом T детектирования, может быть более надежно оценена рассмотрением нескольких изображений SAR, представляющих тот же самый морской район и собранных очень близко по времени, чтобы иметь сильно коррелированные полезные сигналы и некоррелированный спекл-шум.
Соответственно, среднее значение M I характеристик пикселей в нескольких изображениях SAR рассчитывается в соответствии со следующей формулой:
при этом K является числом изображений SAR, рассматриваемых для расчета M I, и I k (i, j) является характеристикой пикселя (i, j) в k-том изображении SAR.
Поэтому стандартное отклонение σM на основе рассчитанного среднего значения M I рассчитывается в соответствии со следующей формулой:
Соответственно, порог T детектирования устанавливается равным σМ/3.
Кроме того, в другом возможном варианте осуществления настоящего изобретения, расчет опорной величины (блок 14) может быть также основан на рассмотрении нескольких изображений SAR, представляющих тот же самый морской район и собранных очень близко по времени. Поэтому, в этом случае, нецелевое опорное статистическое распределение является распределением Пуассона, характеризующимся ожидаемым значением, равным рассчитанному среднему значению M I. В этом случае, мода M* нецелевого опорного статистического распределения равна M I -1, если M I является целым числом, или в другом случае - M I.
Соответственно, относительно детектирования (блок 17) нецелевое опорное статистическое распределение и реальное статистическое распределение рассматриваются как эквивалентные, если результатом является то, что
M*-I M ≤T
тогда как нецелевое опорное статистическое распределение и реальное статистическое распределение не рассматриваются как эквивалентные и, следовательно, цель детектируется в морском подрайоне, представленном выбранными пикселями, если результатом является то, что
M*-I M >T.
В этом случае, порог T детектирования устанавливается равным σМ/3.
Из вышесказанного легко можно видеть, что настоящее изобретение позволяет надежное и эффективное детектирование целей в изображаемых посредством SAR морских районах посредством нетрудной вычислительной обработки без необходимости в какой-либо предварительной обработке изображения SAR, например без снижения или удаления спекл-шума, и без какого-либо априорного знания состояний земли изображаемого морского района.
Таким образом, ясно, что могут быть реализованы многочисленные модификации и варианты настоящего изобретения, находящиеся в пределах объема изобретения, как это определено в приложенной формуле.
Изобретение относится к детектированию цели в морском районе на основе ее изображения Радаром с Синтезированной Апертурой (SAR). Изображение Радара с Синтезированной Апертурой (SAR) составлено из пикселей, причем каждый имеет соответствующую характеристику. Достигаемый технический результат - повышение точности детектирования цели. Способ содержит этапы, на которых рассчитывают первую опорную величину, которая характеризует распределение Пуассона, предполагаемое для характеристик, которые имели бы пиксели в изображении Радара с Синтезированной Апертурой (SAR), если бы морской район был свободен от целей. Способ дополнительно содержит этапы, на которых выбирают пиксели в изображении Радара с Синтезированной Апертурой (SAR), рассчитывают реальную величину, которая характеризует реальное статистическое распределение характеристик выбранных пикселей, и детектируют цель в морском районе на основе рассчитанной первой опорной и реальной величин. Выбранные пиксели находятся в одном и том же подизображении изображения Радара с Синтезированной Апертурой (SAR), детектирование содержит детектирование цели в морском подрайоне морского района, причем морской подрайон представляется подизображением. 3 н. и 1 з.п. ф-лы, 13 ил.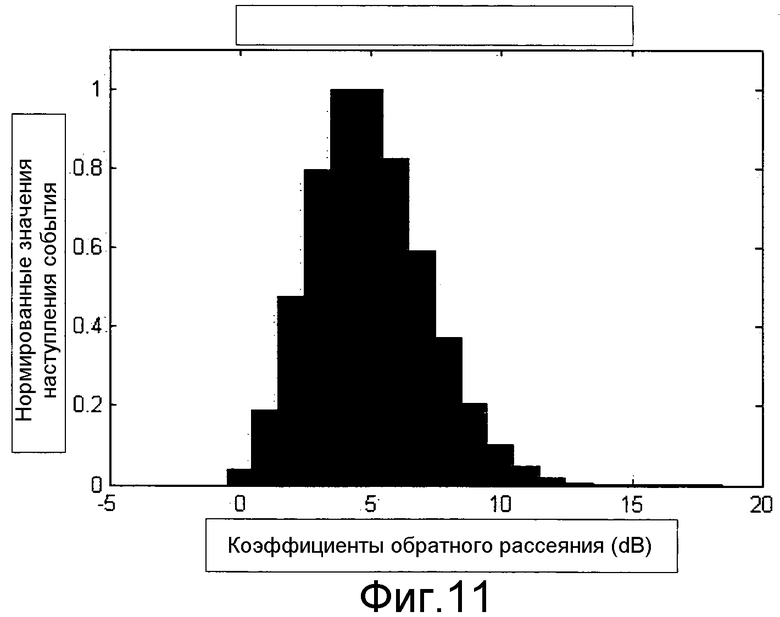
1. Способ детектирования цели в рассматриваемом морском районе на основе данного изображения Радаром с Синтезированной Апертурой (SAR), представляющего упомянутый рассматриваемый морской район, причем способ содержит этапы, на которых:
выбирают подызображение данного изображения Радаром с Синтезированной Апертурой (SAR), упомянутое подызображение представляет подрайон рассматриваемого морского района;
причем способ отличается тем, что дополнительно содержит этапы, на которых:
предоставляют нецелевое опорное распределение для характеристик пикселей в изображении Радаром с Синтезированной Апертурой (SAR) свободного от целей морского района, упомянутое нецелевое опорное распределение является распределением Пуассона;
рассчитывают первую опорную величину, представляющую ожидаемое значение, характеризующее упомянутое нецелевое опорное распределение на основе характеристик пикселей в нескольких изображениях Радара с Синтезированной Апертурой (SAR), представляющих рассматриваемый морской район в разные моменты времени, упомянутая первая опорная величина указывает среднее значение характеристик пикселей в упомянутых нескольких изображениях Радара с Синтезированной Апертурой (SAR);
рассчитывают вторую опорную величину, представляющую наиболее часто встречающуюся характеристику в нецелевом опорном распределении на основе первой опорной величины и математической модели распределения Пуассона;
рассчитывают третью опорную величину, представляющую стандартное отклонение нецелевого опорного распределения на основе первой опорной величины и математической модели распределения Пуассона;
рассчитывают реальное статистическое распределение характеристик пикселей в выбранном подызображении посредством расчета гистограммы характеристик всех пикселей в выбранном подызображении и посредством предоставления реальной величины, указывающей наиболее часто встречающуюся характеристику в реальном статистическом распределении на основе рассчитанной гистограммы;
сравнивают нецелевое опорное распределение и реальное статистическое распределение посредством выполнения сравнения второй опорной величины с реальной величиной посредством порога детектирования, связанного с ошибкой зондирования, на основе третьей опорной величины; и
детектируют цель в подрайоне, если вторая опорная величина и реальная величина отличаются более, чем порог детектирования, связанный с ошибкой зондирования.
2. Способ по п.1, в котором порог детектирования, связанный с ошибкой зондирования, равен трети третьей опорной величины.
3. Электронное устройство для детектирования цели в морском районе на основе изображения Радаром с Синтезированной Апертурой (SAR), выполненное с возможностью реализации способа по любому из предшествующих пунктов.
4. Память, имеющая хранящиеся в ней исполняемые процессором инструкции, чтобы вызывать выполнение процессором способа по любому из пп.1-2.
| ELDHUSET KNUT An Automatic Ship and Ship Wake Detection System for Spacebomc SAR Images in Coastal Regions / IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, IEEE SERVICE CENTER, PISCATAWAY, NJ, US, vol | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 7269538 B1, 11.09.2007 | |||
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| WO 2006073037 A1, 13.07.2006. | |||

