Перекрестная ссылка на родственные заявки
По настоящей заявке испрашивается приоритет на основании предварительной заявки на патент США № 61/073264, поданной 17 июня 2008 года, раскрытие которой в полном объеме включено в настоящий документ путем ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к системам цифровой радиосвязи. Более конкретно, но не в качестве ограничения, настоящее изобретение относится к приемнику и способу для приема и обработки последовательности переданных символов в системе цифровой связи с использованием мягких пилот-символов.
Уровень техники
В системах цифровой связи приемник должен оценивать некоторые параметры для того, чтобы правильно демодулировать переданные данные. Приемнику также может быть необходимо оценивать показатель качества сигнала для обратной связи с передатчиком. Оценка параметров/качества сигнала в общем разделяется на три категории:
(1) Слепая оценка. Обычно этот подход зависит от некоторого свойства/характеристики сигнала или канала, которое известно априори или которое узнают медленным способом (например, статистические данные второго порядка). Самой большой проблемой слепой оценки является производительность. Слепая оценка обычно обладает значительно более низкой эффективностью по сравнению с другими подходами. Также алгоритмы слепой оценки могут быть более сложными.
(2) С помощью пилот-символов. Этот подход включает в себя известные (т.е. пилот) символы в переданном сигнале. Пилот-символы могут быть встроены в последовательность данных (например, контрольную последовательность GSM), или им может быть выделен отдельный ресурс, такой как пилот-код в WCDMA, при условии, что пилот-символы испытывают такое же эффективное замирание канала, как данные. Подход с помощью пилот-символов обычно обеспечивает наилучшую производительность. Однако пилот-символы потребляют ресурсы, которые иначе могли бы быть отведены под передачу полезных данных. Обычно имеется компромисс между наличием достаточных пилот-символов для хорошей оценки и максимизацией пропускной способности данных.
(3) С помощью данных. Этот подход использует демодулированные символы данных в качестве “дополнительных” пилот-символов. Обычно этот подход используют совместно либо со слепой оценкой, либо с подходом с помощью пилот-символов. Имеются две проблемы, связанные с подходом с помощью данных. Во-первых, слепая оценка или оценка с помощью пилот-символов (или обе) обычно требуется в качестве первого этапа приемника. Следовательно, подходы с помощью данных требуют дополнительной сложности приемника. Во-вторых, подходы с помощью данных могут ухудшить производительность приемника вследствие влияния ошибок при демодуляции данных. В подходах с помощью данных допускают, что символы демодулированных данных должны быть правильными, и их используют в качестве дополнительных пилот-символов. Однако, если символы данных являются неправильными, алгоритмы оценки параметра/качества сигнала могут создавать неправильные результаты. Влияния неправильного решения (решений) символов могут сохраняться в течение более одного интервала времени оценки, таким образом, подходы с помощью данных могут требовать специальных механизмов, чтобы избегать влияния распространения ошибок.
Подход с помощью данных использован в ряде существующих систем связи. Например, в системах широкополосного множественного доступа с кодовым разделением (WCDMA) управляющий канал в восходящей линии связи демодулируют/декодируют, и решения символов используют в качестве эффективных пилот-символов. Это также предложено для управляющего канала WCDMA в нисходящей линии связи. В цифровой усовершенствованной мобильной телефонной системе (D-AMPS) канал сначала оценивают относительно слова синхронизации, а затем отслеживают относительно данных во время выравнивания. В эквалайзере ранние временные ненадежные решения подают в устройство отслеживания, а задержанные лучшие решения подают в декодер. Также в D-AMPS и GSM многопроходная (турбо) демодуляция/декодирование использует декодированные/повторно закодированные символы в качестве эффективных пилот-символов во втором проходе.
Раскрытие изобретения
Настоящее изобретение преодолевает недостатки предшествующего уровня техники с помощью передачи некоторых символов с более высокой надежностью, чем других. Эти так называемые “мягкие пилот-символы” сначала демодулируют, а затем используют в качестве известных символов для использования в оценке канала и демодуляции символом модуляции более высокого порядка (опорного указателя амплитуды).
Таким образом, один вариант осуществления настоящего изобретения адресован способу в радиоприемнике для оценки параметров принятого радиосигнала, который включает в себя последовательность переданных символов. Способ включает в себя этапы демодуляции символов, переданных сначала с более высокой надежностью, чтобы сформировать мягкие пилот-символы, и использования мягких пилот-символов в качестве известных символов, чтобы оценивать параметры принятого радиосигнала. Эти мягкие пилот-символы являются более надежными, чем окружающие символы, таким образом давая возможность надежной оценки параметра, управляемой с помощью решения. Кроме того, вставка символа модуляции “постоянной огибающей” среди символов модуляции более высокого порядка является особенно полезной при установлении опорного указателя амплитуды, существенного при демодуляции символов модуляции более высокого порядка.
В одном варианте осуществления мягкие пилот-символы модулируют с помощью более простой модуляции более низкого порядка (например, BPSK или QPSK) по сравнению с остатком последовательности символов, который, вероятно, является модуляцией более высокого порядка (например, 16-квадратурной амплитудной модуляцией (16QAM) или 64QAM). С помощью использования этих мягких пилот-символов символы по-прежнему могут переносить некоторые данные в противоположность фиксированным пилот-символам, которые не разрешают никакой пропускной способности данных для символа. Эти определенные местоположения пилот-сиволов (время/частота/код) и тип (типы) модуляции являются известными приемнику. Приемник может знать информацию априори или посредством сигнализации.
Мягкие пилот-символы предоставляют альтернативу явным пилот-символам данных для будущих версий WCDMA. С мягкими пилот-символами явные пилот-символы являются необязательными. Со знанием типа модуляции и местоположения мягких пилот-символов во времени, частоте и коде приемник может максимизировать производительность. Это предусматривает более высокие скорости передачи данных, чем иначе были бы возможны с явными пилот-символами.
В конкретном варианте осуществления изобретение реализовано в двухпроходном универсальном многоотводном приемнике (G-многоотводном приемнике). Рабочие характеристики G-многоотводного приемника улучшены по существу до такой степени, что почти соответствуют идеальному приемнику. Таким образом, изобретение обеспечивает наилучшие рабочие характеристики с учетом подхода линейного выравнивания. Двухпроходный G-многоотводный приемник включает в себя средство для вычисления набора приближенных весовых коэффициентов объединения в первом проходе, средство для идентификации набора мягких пилот-символов в последовательности, причем мягкие пилот-символы модулируют с помощью модуляции более низкого порядка, чем остальные символы в последовательности, и средство для использования приближенных весовых коэффициентов объединения, чтобы когерентно объединять значения со снятым расширением, соответствующие мягким пилот-символам, чтобы создавать оценки символов. Приемник также включает в себя средство для повторного масштабирования оценок символов, средство для принятия жестких решений символов без вовлечения декодера в оценки повторно масштабированных символов с учетом совокупности, использованной для передачи, и средство для использования жестких решений символов в качестве пилот-символов демодуляции, чтобы непараметрическим способом оценивать матрицу ковариации искажений. Приемник также включает в себя средство для вычисления набора уточненных весовых коэффициентов объединения во втором проходе с использованием оцененной матрицы ковариации искажений, и средство для объединения всех данных трафика с использованием уточненных коэффициентов объединения.
В другом варианте осуществления настоящее изобретение адресовано системе, содержащей передатчик и приемник для выполнения способов, как описано в нижеследующем подробном описании.
Краткое описание чертежей
В следующем разделе изобретение будет описано со ссылкой на иллюстративные варианты осуществления, проиллюстрированные на фигурах, на которых:
фиг.1 - блок-схема последовательности этапов, иллюстрирующая этапы иллюстративного варианта осуществления способа настоящего изобретения;
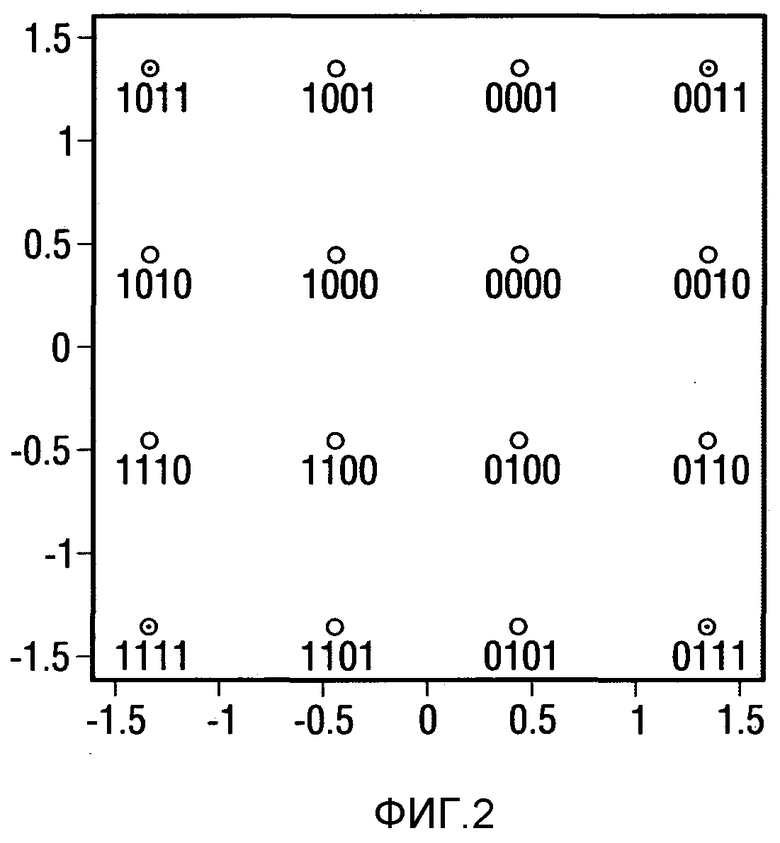
фиг.2 изображает отображение бит данных в точки в совокупности для 16QAM в одном иллюстративном варианте осуществления настоящего изобретения;
фиг.3 изображает отображение бит данных в точки в совокупности для 16QAM в другом иллюстративном варианте осуществления настоящего изобретения;
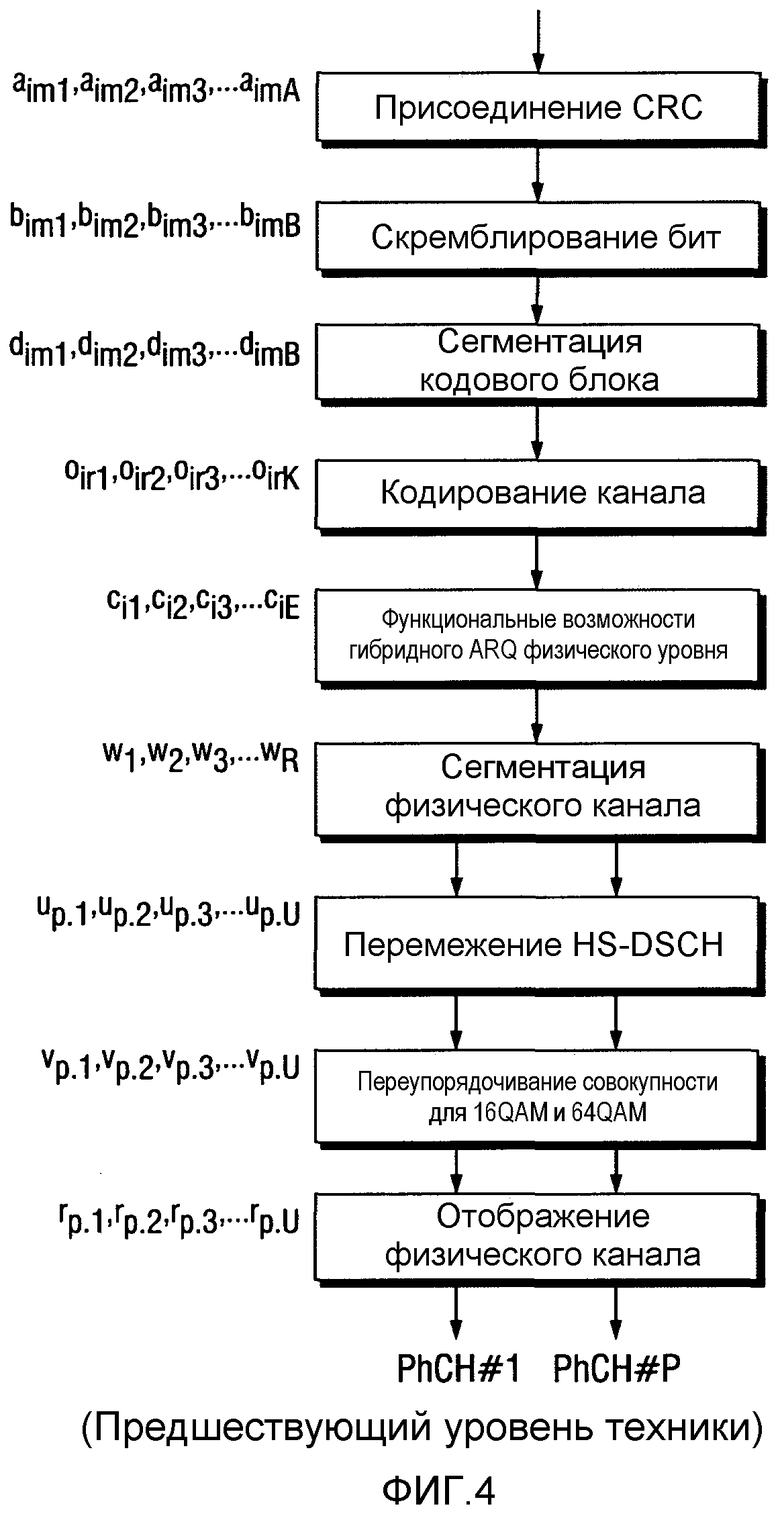
фиг.4 (предшествующий уровень техники) иллюстрирует существующую цепочку кодирования канала для HS-DSCH;
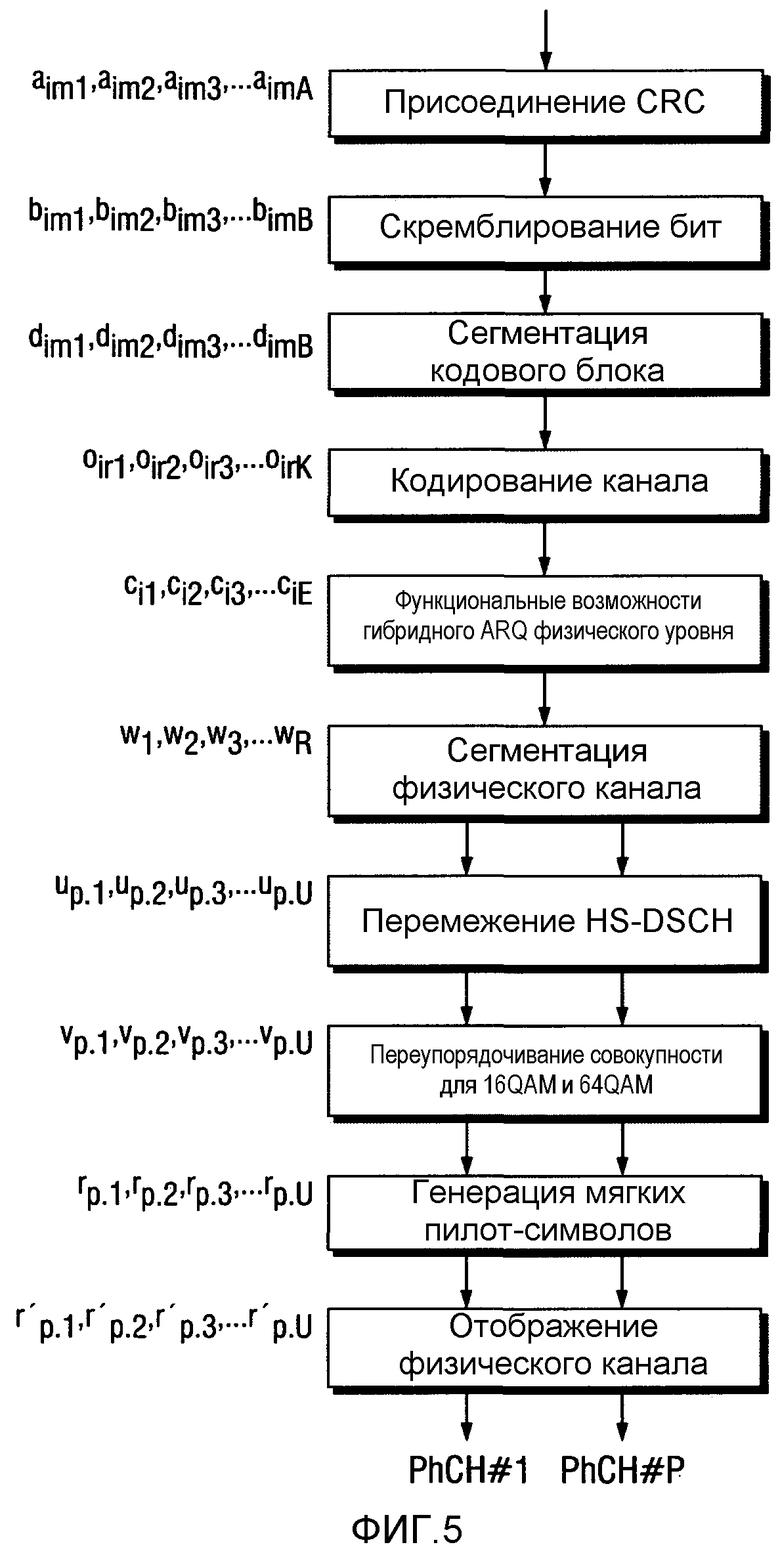
фиг.5 иллюстрирует цепочку кодирования канала для HS-DSCH в иллюстративном варианте осуществления настоящего изобретения;
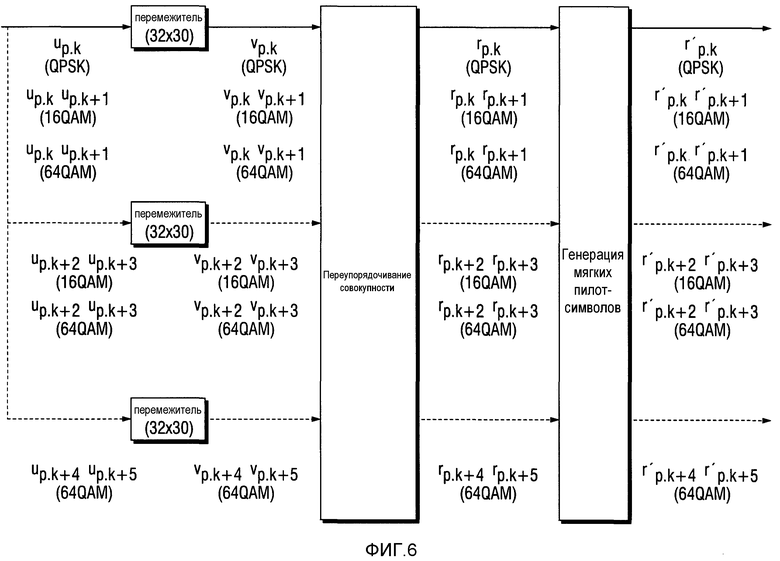
фиг.6 - блок-схема последовательности этапов, иллюстрирующая обзор процесса генерации мягких пилот-символов в иллюстративном варианте осуществления настоящего изобретения;
фиг.7 - блок-схема последовательности этапов, иллюстрирующая процесс генерации мягких пилот-символов для HS-DSCH в иллюстративном варианте осуществления настоящего изобретения;
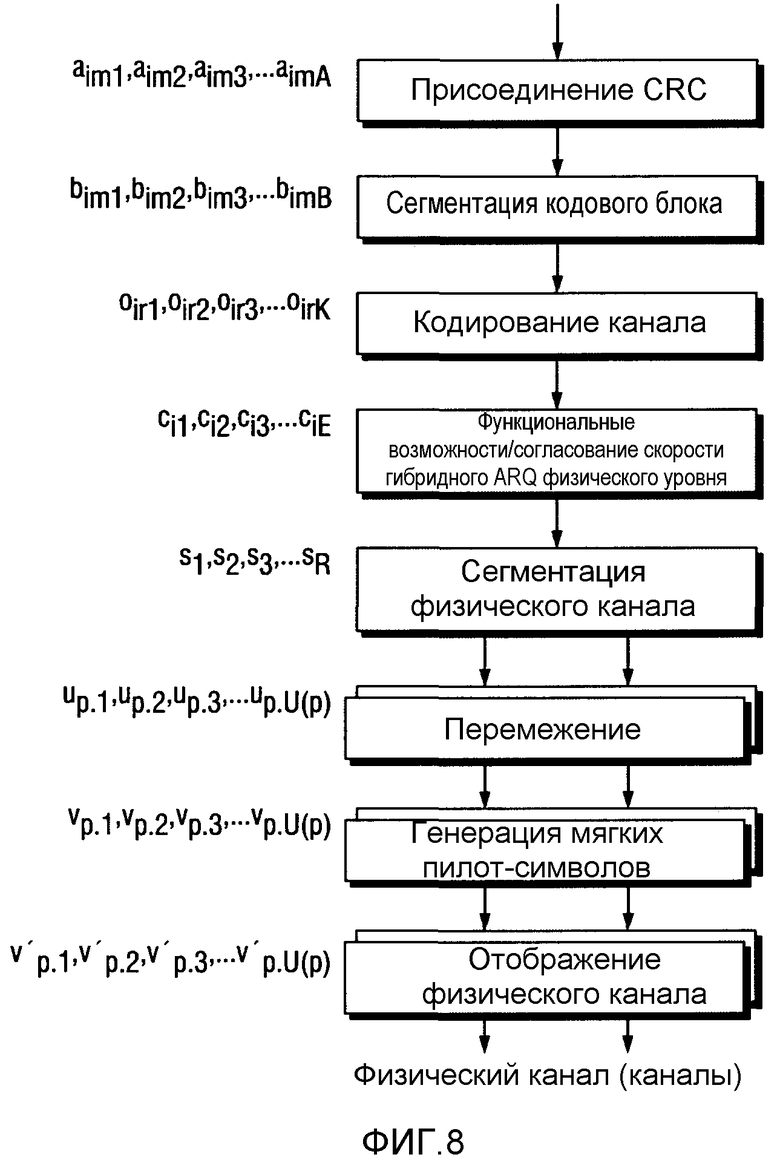
фиг.8 - блок-схема последовательности этапов, иллюстрирующая процесс генерации мягких пилот-символов для E-DCH в иллюстративном варианте осуществления настоящего изобретения;
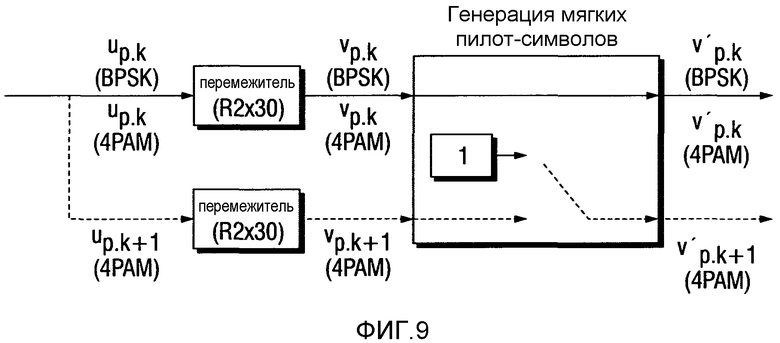
фиг.9 - функциональная блок-схема примерного варианта осуществления структуры перемежителя для E-DCH;
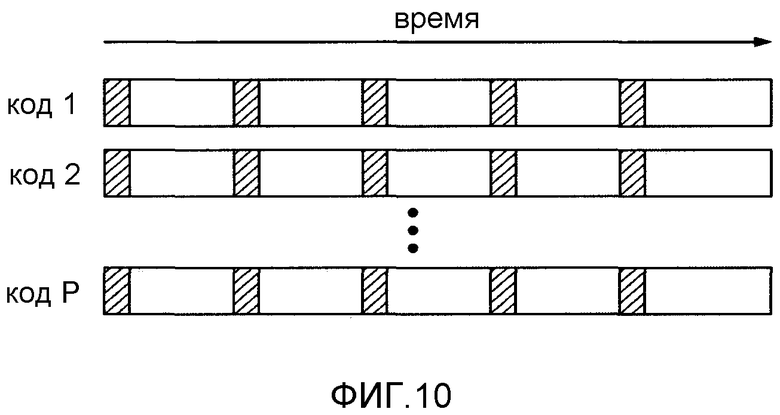
фиг.10 иллюстрирует первый иллюстративный вариант осуществления определения местоположения мягких пилот-символов;
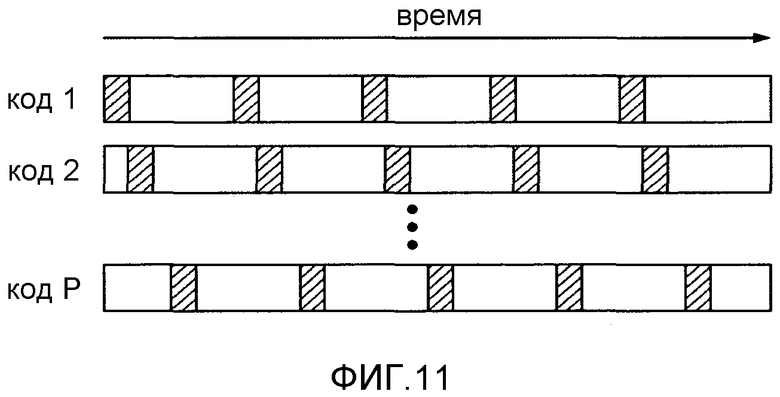
фиг.11 иллюстрирует второй иллюстративный вариант осуществления определения местоположения мягких пилот-символов;
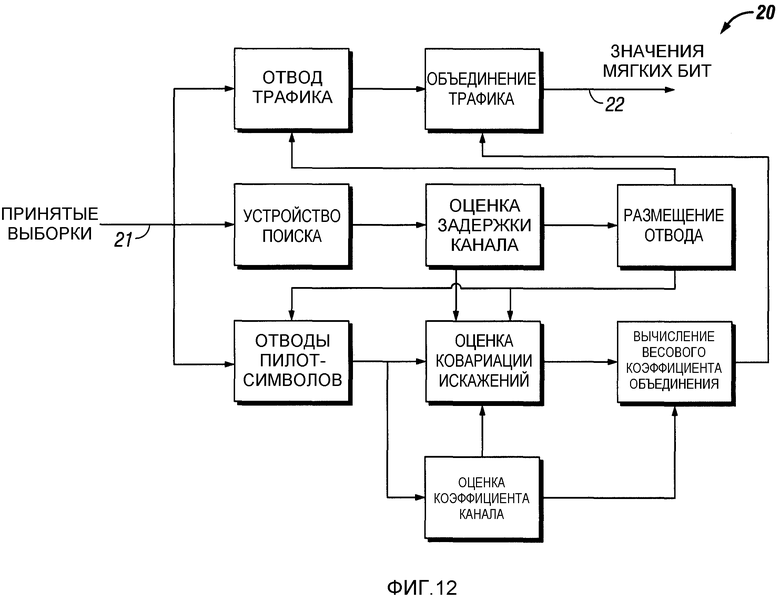
фиг.12 - функциональная блок-схема примерного варианта осуществления двухпроходного G-многоотводного приемника; и
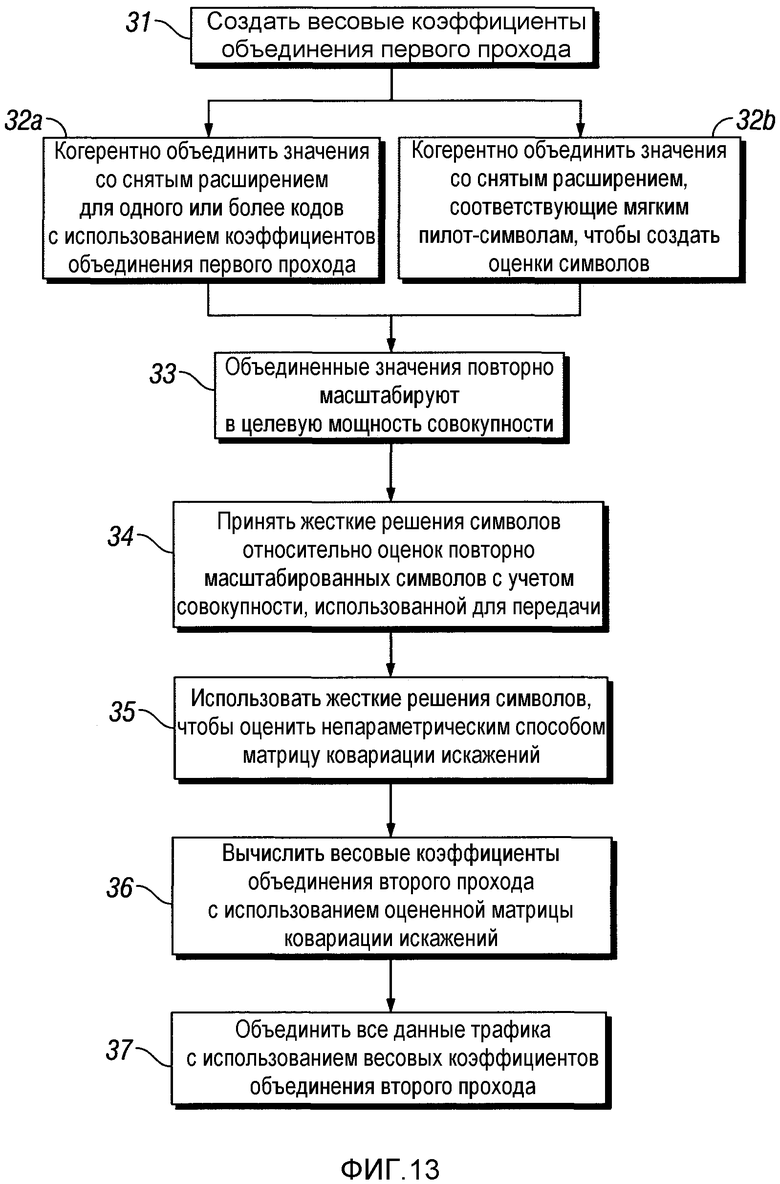
фиг.13 - блок-схема последовательности этапов, иллюстрирующая иллюстративный вариант осуществления способа обработки, выполняемого с помощью двухпроходного G-многоотводного приемника согласно настоящему изобретению.
Осуществление изобретения
Для связи с высокой скоростью передачи данных используют модуляции более высокого порядка, такие как 16QAM и 64QAM, чтобы увеличить спектральную эффективность. В соответствии с первым вариантом осуществления настоящего изобретения передатчик обозначает определенные символы в последовательности данных как так называемые “мягкие пилот-символы” с помощью использования конкретной альтернативной модуляции для этих символов. Порядок конкретной модуляции и местоположение для этих символов (с точки зрения времени, кода и/или частоты) являются известными приемнику или сигнализируемыми приемнику. Приемник использует мягкие пилот-символы, чтобы получить первоначальную оценку параметров сигнала, таких как ответвления канала и матрица корреляции. После первой демодуляции выбранные символы могут быть использованы в качестве эффективных пилот-символов во втором проходе оценки параметра. С помощью ограничения выбранных мягких пилот-символов до более низкой модуляции, чем остальных символов в последовательности, их выборы являются достаточно надежными, чтобы сделать их полезными пилот-символами. Мягкие пилот-символы являются иными, чем традиционные фиксированные пилот-символы, в том что некоторую пропускную способность данных переносят с помощью этих мягких пилот-символов. Таким образом, замена традиционных фиксированных пилот-символов мягкими пилот-символами улучшает пропускную способность данных.
Фиг.1 - блок-схема последовательности этапов, иллюстрирующая этапы иллюстративного варианта осуществления способа настоящего изобретения. На этапе 11 радиосигнал передают с некоторыми символами, имеющими более высокую надежность (например, с помощью модуляции более низкого порядка), чем другие переданные символы. На этапе 12 радиосигнал принимают и символы более высокой надежности сначала демодулируют, чтобы сформировать мягкие пилот-символы. На этапе 13 мягкие пилот-символы используют в качестве известных символов для оценки канала и демодуляции символов модуляции более высокого порядка. На этапе 14 данные извлекают как из мягких пилот-символов, так и из символов модуляции более высокого порядка.
Иллюстративный вариант настоящего изобретение задает тип модуляции и местоположение (время/частоту/код) мягких пилот-символов с последовательности данных. В соответствии с вариантом осуществления изобретения точки совокупности мягких пилот-символов берут в качестве поднабора совокупности модуляции более высокого порядка для передачи данных, такой как 16QAM или 64QAM. Передатчик может использовать заданную модуляцию более низкого порядка для пилот-символов, такую как двоичная фазовая манипуляция (BPSK) или квадратурная фазовая манипуляция (QPSK). Для остатка последовательности символов передатчик может использовать модуляцию более высокого порядка (например, 16QAM или 64QAM). Эти заданные местоположения мягких пилот-символов и тип (типы) модуляции являются известными приемнику. Приемник может знать информацию априори или посредством сигнализации.
Таким образом, настоящее изобретение передает символы модуляции более низкого порядка, вставленные среди символов модуляции более высокого порядка, а приемник выполняет связанные действия, чтобы использовать символы модуляции более низкого порядка в качестве эффективных пилот-символов. Символ может переносить диапазон числа бит m: бит m=0 соответствует чистому пилот-сигналу, бит m=1 соответствует BPSK, биты m=2 соответствуют QPSK и т.д. до максимального числа M (=6 для 64QAM). Если допускают для простоты, что все символы имеют одинаковую энергию, тогда энергия бита и надежность бита уменьшаются с m. Таким образом, символы могут быть использованы в качестве пилот-символов разных уровней надежности, и приемник может выполнять оценки параметров в множестве проходов.
Фиг.2 изображает отображение бит данных в точки в совокупности для 16QAM в одном иллюстративном варианте осуществления настоящего изобретения. Четыре угловые точки совокупности 16QAM (изображенные на фигуре как отмеченные точки) взяты в качестве совокупности для мягких пилот-символов. Можно без труда распознать два признака этого варианта осуществления. Во-первых, совокупность мягких пилот-символов является эквивалентной масштабированной совокупности QPSK. Таким образом, она предлагает преимущества постоянной огибающей и более высокой средней мощности. Во-вторых, точки совокупности мягких пилот-символов могут быть легко адресованы с помощью совокупности более высокого порядка с помощью сохранения поднабора фиксированных меток бит. В примере, изображенном на фиг.2, точки совокупности мягких пилот-символов являются точками с последними двумя фиксированными метками бит в “11”.
Как замечено, использование мягких пилот-символов заставляет переданные символы 16QAM или 64QAM иметь более высокую среднюю мощность. Например, если один из десяти символов для одного кода канализации является мягким пилот-символом, среднюю мощность увеличивают на 0,15 дБ для 16QAM и на 0,54 дБ для 64QAM. В качестве альтернативы, если имеется пятнадцать кодов канализации и один из десяти символов для одного из пятнадцати кодов канализации, среднюю мощность увеличивают только на 0,02 дБ для 16QAM и на 0,04 дБ для 64QAM. На практике переданная мощность может быть обязательно увеличена на эти величины при использовании мягких пилот-символов. Однако понятно, что результирующую производительность системы улучшают с помощью использования мягких пилот-символов.
Фиг.3 изображает отображение бит данных в точки в совокупности для 16QAM в соответствии с другим иллюстративным вариантом осуществления настоящего изобретения. В этом варианте осуществления размер совокупности мягких пилот-символов расширен, чтобы позволить более высокую пропускную способность для переноса данных. Однако совокупность мягких пилот-символов обеспечивает признак постоянной квадратурной амплитуды, который может быть использован, чтобы получать опорный указатель амплитуды. Точки совокупности мягких пилот-символов адресуют в совокупности более высокого порядка с помощью фиксации метки последнего бита в “1”. Специалистам в данной области техники понятно, что может быть задана альтернативная совокупность мягких пилот-символов с помощью фиксации метки третьего бита в “1”, обеспечивая постоянную синфазную амплитуду.
Генерация мягких пилот-символов в HSPA
Введение мягких пилот-символов уменьшает число закодированных бит канала, которые могут быть перенесены с помощью сигнала передачи. Уменьшение закодированных бит канала может быть осуществлено с помощью двух разных подходов, описанных ниже.
Фиг.4 иллюстрирует существующую цепочку кодирования канала для высокоскоростного совместно используемого канала нисходящей линии связи (HS-DSCH). В первом подходе для осуществления уменьшения закодированных бит канала поведение всей цепочки кодирования канала изменяют аналогично поведению для HS-DSCH. Однако последствием является не просто другое число закодированных бит, выводимых с помощью “функциональных возможностей HARQ физического уровня”, а скорее существенное повторное конструирование и переопределение некоторых взаимосвязанных и сложных процедур физического уровня с “функциональных возможностей HARQ физического уровня”, “сегментации физического канала”, ”перемежении HS-DSCH” и ”переупорядочивании совокупности”. Такое существенное повторное конструирование критичной цепочки кодирования канала будет делать большую часть существующего осуществления устаревшим и будет трудно совместно существовать с новыми и традиционными приборами в сети.
Фиг.5 иллюстрирует цепочку кодирования канала для HS-DSCH в иллюстративном варианте осуществления настоящего изобретения. Во втором, предпочтительном подходе для осуществления уменьшения закодированных бит канала, мягкие пилот-символы предпочтительно генерируют с помощью прокалывания низкого уровня закодированных бит канала до стадий “отображения физического канала” цепочки кодирования канала. Таким образом, предпочтительный вариант осуществления делает присутствие мягких пилот-символов прозрачным для стадий “функциональных возможностей HARQ физического уровня”, “сегментации физического канала”, ”перемежения HS-DSCH” и ”переупорядочивания совокупности”.
Фиг.6 - блок-схема последовательности этапов, иллюстрирующая обзор процесса генерации мягких пилот-символов в иллюстративном варианте осуществления настоящего изобретения. В HSDPA процедура собирания бит в функциональных возможностях HARQ физического канала и перемежении канала HS-DSCH сконструирована с возможностью отображения систематических турбо закодированных бит, если присутствуют, в метки первых бит 16QAM или 64QAM, насколько возможно. Целью этого конструирования является гарантировать, чтобы важные систематические турбозакодированные биты передавали через канал с более высокой надежностью. Как изображено на фиг.6, это выполняют в перемежителе канала с помощью использования попарного мультиплексирования бит и независимых прямоугольных перемежителей. Когда модуляция данных основана на QPSK, только цепочка первого прямоугольного перемежителя является активной. Когда модуляция данных основана на 16QAM, активными являются цепочки первого и второго перемежителя. Все три цепочки являются активными, когда данные переносят с помощью 64QAM. Соединенные с присваиванием меток, заданным в 3GPP, “Technical Specification Group Radio Access Network; Spreading and Modulation (FDD)”, TS 25.213 v8, биты в первой цепочке передают через канал с самой высокой надежностью. Биты в третьей цепочке передают с самой низкой надежностью. Следовательно, в первоначальных передачах систематические биты обычно передают через первую цепочку, насколько возможно. Для первоначальных передач параметры HARQ обычно устанавливают таким образом, чтобы эффективно обходить “переупорядочивание совокупности”. Для специалистов в данной области техники будет очевидно, что мягкие пилот-символы могут быть вставлены прямо после перемежения канала. Для повторных передач параметры HARQ могут быть использованы для того, чтобы отдать приказ “переупорядочивания совокупности”, чтобы эффективно повторно передать закодированные биты канала с другой надежностью. Мягкие пилот-символы могут быть вставлены в сигнал после процедуры “переупорядочивания совокупности”.
Фиг.7 - блок-схема последовательности этапов, иллюстрирующая процесс генерации мягких пилот-символов для HS-DSCH в иллюстративном варианте осуществления настоящего изобретения. Входы закодированных бит обозначены с помощью  , а выходы обозначены с помощью
, а выходы обозначены с помощью  . Обычно введенные биты передают на выход без изменения:
. Обычно введенные биты передают на выход без изменения:  . Если масштабированный мягкий пилот-символ QPSK (такой, как символ, изображенный на фиг.2) вставляют, чтобы заменить символ данных 16QAM, тогда
. Если масштабированный мягкий пилот-символ QPSK (такой, как символ, изображенный на фиг.2) вставляют, чтобы заменить символ данных 16QAM, тогда  ,
,  ,
,  и
и  . Если масштабированный мягкий пилот-символ QPSK вставляют, чтобы заменить символ данных 64QAM, тогда , , , ,
. Если масштабированный мягкий пилот-символ QPSK вставляют, чтобы заменить символ данных 64QAM, тогда , , , ,  и
и  .
.
Если мягкий пилот-символ с постоянной квадратурной амплитудой (такой как изображен на фиг.3) вставляют, чтобы заменить символ данных 16QAM, тогда , , и . Если мягкий пилот-символ с постоянной квадратурной амплитудой вставляют, чтобы заменить символ данных 64QAM, тогда  ,
,  ,
,  , ,
, ,  и . Если мягкий пилот-символ с постоянной синфазной амплитудой вставляют, чтобы заменить символ данных 16QAM, тогда , , и . Если мягкий пилот-символ с постоянной синфазной амплитудой вставляют, чтобы заменить символ данных 64QAM, тогда , , , , и .
и . Если мягкий пилот-символ с постоянной синфазной амплитудой вставляют, чтобы заменить символ данных 16QAM, тогда , , и . Если мягкий пилот-символ с постоянной синфазной амплитудой вставляют, чтобы заменить символ данных 64QAM, тогда , , , , и .
Генерация мягких пилот-символов для усовершенствованного специализированного канала (E-DCH)
Фиг.8 - блок-схема последовательности этапов, иллюстрирующая процесс генерации мягких пилот-символов для E-DCH в иллюстративном варианте осуществления настоящего изобретения. Чтобы выполнить надежную идентификацию, аналогичную идентификации в HS-DSCH, процедура собирания бит в функциональных возможностях HARQ физического уровня и перемежение канала сконструированы с возможностью отображения систематических турбозакодированных бит, если присутствуют, в метки первых бит 4РАМ, насколько возможно. В соответствии с предпочтительным вариантом осуществления мягкие пилот-символы генерируют после перемежения канала E-DCH.
Фиг.9 - функциональная блок-схема иллюстративного варианта осуществления структуры перемежителя для E-DCH. Перемежение канала облегчают с помощью ветвей двух прямоугольных перемежителей, когда данные переносят с помощью 4РАМ. Входы закодированных бит в “генерацию мягких пилот-символов” обозначены с помощью  , а выходы обозначены с помощью
, а выходы обозначены с помощью  . Обычно введенные биты передают на выход без изменения:
. Обычно введенные биты передают на выход без изменения:  . Если масштабированный мягкий пилот-символ BPSK вставляют, чтобы заменить символ данных 4РАМ, тогда
. Если масштабированный мягкий пилот-символ BPSK вставляют, чтобы заменить символ данных 4РАМ, тогда  ,
,  .
.
В соответствии с предпочтительным вариантом осуществления мягкие пилот-символы генерируют с помощью прокалывания закодированных бит канала в фиксированных местоположениях (с точки зрения времени и кода/частоты). На стороне приемника мягкие значения, соответствующие проколотым битам, устанавливают в ноль. С помощью этого использование мягких пилот-символов не вносит никаких изменений в операцию, дополнительную согласованию скорости ядра, и в осуществление декодера канала.
Также следует заметить, что в соответствии с этим вариантом осуществления мягкие пилот-символы генерируют с помощью прокалывания закодированных бит канала, которые отображают в метки наименее надежных бит. Поскольку мягкие значения, соответствующие этим битам низкой надежности, обычно являются очень малыми, установка их в ноль вносит пренебрежительно малое влияние в общую производительность кодирования канала.
Местоположение мягких пилот-символов
Мягкие пилот-символы могут быть встроены в одном и том же коде, в одном отдельном коде, в разных антеннах в системах с множеством входов и множеством выходов (MIMO), и тому подобных. Размещение может быть координировано таким образом, что мягкие пилот-символы либо совпадают, либо не совпадают в разных кодах и/или антеннах.
Мягкие пилот-символы могут быть вставлены в сигнал несколькими практическими способами:
1. HSPA - один код, назначенный пользователю HSPA, использует мягкие пилот-символы, в то время как другие коды, назначенные тому же пользователю, используют модуляцию более высокого порядка.
2. HSPA - определенные символы данных в каждом коде, назначенном пользователю HSPA, являются мягкими пилот-символами, в то время как остальные символы в кодах являются традиционными символами данных. Например, символы от 0 по N-1 в коде А, N по 2N-1, в коде В и т.д. могут быть мягкими пилот-символами.
3. HSPA - символы N по 2N являются мягкими пилот-символами во всех кодах, назначенных пользователю HSPA, в то время как остальные символы в кодах, назначенных тому же пользователю, являются традиционными символами данных.
4. Долгосрочное развитие (LTE) - заменить пилот-символы демодуляции мягкими пилот-символами для некоторых (или всех) встроенных пилот-символов демодуляции.
Следующие варианты осуществления сконструированы с дополнительным рассмотрением (а) поддержки изменяющихся во времени каналов, (b) минимизации влияния на производительности кодирования, (с) уменьшения влияния на отношение максимального к среднему (PAR).
Фиг.10 иллюстрирует первый иллюстративный вариант осуществления местоположения мягких пилот-символов. Мягкие пилот-символы расширены во времени, чтобы обеспечить более надежный указатель для изменяющихся во времени каналов. Точное местоположение символов может быть задано с помощью периодических шаблонов. Чтобы предусмотреть усреднение для уменьшения шума оценки, мягкие пилот-символы могут быть представлены более чем в одном коде в одних и тех же местоположениях расширения. В противоположность концентрации пилот-символов, только в один код (или очень мало кодов), шаблон расширения по кодам минимизирует влияние на общую производительность декодирования канала.
Фиг.11 иллюстрирует второй иллюстративный вариант осуществления местоположения мягких пилот-символов. Вариант осуществления, ранее проиллюстрированный на фиг.10, подходит только, если мягкие пилот-символы не способствуют существенному увеличению PAR. Если увеличение PAR представляет интерес, может быть принят вариант осуществления фиг.11. Местоположения мягких пилот-символов между разными кодами являются смещенными, чтобы уменьшить увеличение PAR.
Использование мягких пилот-символов обеспечивает несколько преимуществ. Во-первых, мягкие пилот-символы являются более надежными, чем окружающие символы, таким образом, обеспечивая надежную оценку параметра, управляемую решением. Во-вторых, мягкие пилот-символы могут по-прежнему переносить некоторые данные в противоположность фиксированным пилот-смиволам, которые не позволяют никакой пропускной способности данных для символа. В-третьих, с помощью делания мягких пилот-символов символами модуляции с “постоянной огибающей”, вставленными среди символов модуляции более высокого порядка, мягкие пилот-символы становятся особенно полезными при установлении опорного указателя амплитуды, существенного для демодуляции символов модуляции более высокого порядка.
Использование мягких пилот-символов является применимым к любой проводной или беспроводной системе связи. Мягкие пилот-символы обеспечивают более высокую пропускную способность данных, чем традиционные схемы с помощью пилот-символов, и не жертвуют производительностью, как делают большинство схем слепой оценки. Подход мягких пилот-символов требует, чтобы приемник использовал подход с помощью данных. Однако в противоположность традиционным подходам с помощью данных настоящее изобретение задает модуляцию и местоположение (во времени/коде/частоте) мягких пилот-символов таким образом, чтобы приемник узнавал, что имеются определенные символы высокого качества, которые могут быть использованы в подходе с помощью данных. Алгоритмы оценки приемника, основанные на таких символах, являются менее склонными к ошибкам и обеспечивают существенно хорошие оценки параметра и/или качества сигнала.
Приемник HSPA, который может использовать такие мягкие пилот-символы, полностью описан ниже в иллюстративном варианте осуществления, состоящем из универсального многоотводного приемника (G-многоотводного приемника) с помощью данных. В качестве пояснения, G-многоотводный приемник принимает и обрабатывает сигналы WCDMA, испытывающие помехи в распределенных каналах. Эти помехи состоят из собственных помех (межсимвольных помех), помех множественного доступа (помех вследствие помех ненулевой взаимной корреляции) и помех от другой ячейки (нисходящей линии связи) или другого пользователя (восходящей линии связи). Эти помехи должны быть подавлены, для того чтобы достичь хорошей пропускной способности HSDPA. Кроме того, требования увеличенной пропускной способности, установленные с помощью 3GPP для приемников типа 2 (терминала с одной антенной) и типа 3 (терминала с двумя антеннами), не могут быть удовлетворены без подавления помех.
Линейные способы для подавления помех обычно распадаются на категории выравнивания уровня элементов сигнала или уровня символов. Выравнивание уровня символов следует обычной архитектуре многоотводного приемника, в которой снимают расширение принятых данных уровня элементов сигнала с множеством задержек, а затем объединяют множество отображений. Выравнивание уровня элементов сигнала изменяет последовательность этих операций на обратную, принятые данные элементов сигнала сначала объединяют с использованием линейного фильтра, а затем снимают расширение с одной задержкой. Этим методы обычно являются эквивалентными с точки зрения производительности.
Фиг.12 - функциональная блок-схема G-многоотводного приемника 20, который может быть модифицирован, чтобы использовать настоящее изобретение. Например, приемник может быть осуществлен в подвижном терминале или другом беспроводном устройстве связи. Сигналы расширенного спектра передают через радиоканал и принимают в одной или более антенн приемника. Процессор радиоприемника (не изображен) генерирует последовательности выборок 21 преобразованного в цифровой вид сигнала основной полосы частот из принятого сигнала и вводит их в G-многоотводный приемник. В свою очередь G-многоотводный приемник 20 демодулирует принятые выборки сигнала, чтобы создать оценки 22 мягких значений или бит. Эти оценки предоставляют в одну или более дополнительных схем обработки (не изображены) для дополнительной обработки, такой как декодирование с упреждающей коррекцией ошибок (FEC) и преобразование в речь, текст или графические изображения и тому подобной. Специалисты в данной области техники поймут, что конкретный тип (типы) информации, переносимый с помощью принятого сигнала, и конкретные этапы обработки, примененные с помощью приемника 20, являются функцией от его подразумеваемого использования и типа.
Полное описание G-многоотводного приемника, походящего для использования с мягкими пилот-символами согласно настоящему изобретению, предоставлено в принадлежащей правообладателю настоящей заявки опубликованной заявке на патент США № 2005/0201447, раскрытие которой в полном объеме включено в настоящее описание путем ссылки.
Обращаясь сначала к выравниванию уровня символов, весовые коэффициенты объединения G-многоотводного приемника выполняют когерентное объединение, а также подавление помех. Весовые коэффициенты объединения задают с помощью:

где  - матрица ковариации искажений, а h - вектор результирующих коэффициентов канала. Следует заметить, что понятие “искажения” включает в себя как помехи, так и шум, в то время как понятие “результирующий коэффициент канала” относится к коэффициенту канала, который включает в себя результаты фильтров передачи и приема, а также замирание канала.
- матрица ковариации искажений, а h - вектор результирующих коэффициентов канала. Следует заметить, что понятие “искажения” включает в себя как помехи, так и шум, в то время как понятие “результирующий коэффициент канала” относится к коэффициенту канала, который включает в себя результаты фильтров передачи и приема, а также замирание канала.
Имеются два основных способа для осуществления G-многоотводного приемника. Эти способы обычно известны как непараметрический и параметрический. В настоящей заявке непараметрический способ фокусируется на подходе, взятом, чтобы получать матрицу ковариации искажений. Непараметрический способ (способы) является слепым и оценивает непосредственно из наблюдаемых данных. Параметрический способ допускает лежащую в основе модель и вычисляет из параметров модели. Примеры обоих способов предоставлены ниже.
Имеются два способа, чтобы можно было получить непараметрическую оценку матрицы ковариации искажений. Первый подход использует пилот-канал, чтобы оценивать величины, основанные на интервале времени:
Используя эти величины, матрица ковариации искажений может быть получена из:

Другой подход для генерации непараметрической оценки матрицы ковариации искажений в включает в себя использование незанятых кодов трафика, как описано в принадлежащей правообладателю настоящей заявке и также находящейся в рассмотрении заявке на патент США № 12/135268, поданной 9 июня 2008 года. Значения со снятым расширением для этих кодов содержат только выборки искажений. Эти выборки искажений могут быть использованы, чтобы непосредственно оценивать  следующим образом:
следующим образом:

В этом уравнении  - вектор со снятым расширением символов трафика для q-го кода в течение k-го интервала символа,
- вектор со снятым расширением символов трафика для q-го кода в течение k-го интервала символа,  - число символов на код и
- число символов на код и  - число кодов.
- число кодов.
Параметрический подход для генерации матрицы ковариации искажений зависит от модели для помех, как описано в принадлежащей правообладателю настоящей заявке, опубликованной заявке на патент США № 2005/0201447. Эта модель зависит от радиоканала (радиоканалов) между UE и J базовыми станциями, создающими помехи, модель для матрицы ковариации искажений задают с помощью:

где
В этом уравнении  - полная энергия элементов сигнала для базовой станции j,
- полная энергия элементов сигнала для базовой станции j,  - вектор коэффициентов радиоканала (среды) для канала между UE и j-й базовой станцией,
- вектор коэффициентов радиоканала (среды) для канала между UE и j-й базовой станцией,  представляет свертку фильтров формы импульсов приема и передачи, оцененных в
представляет свертку фильтров формы импульсов приема и передачи, оцененных в  ,
,  - вектор L задержек канала, соответствующих каналу между UE и j-й базовой станцией,
- вектор L задержек канала, соответствующих каналу между UE и j-й базовой станцией,  - время элемента сигнала,
- время элемента сигнала,  - задержка k-го отвода, используемого с помощью UE.
- задержка k-го отвода, используемого с помощью UE.
Выравнивание элементов сигнала описано в G. Kutz и др. “Sparse Chip Equalizer for DS-CDMA Downlink Receivers”, IEEE Communication Letters, vol.9, no.1, p. 10-12, 2005. В соответствии с Kutz принятый сигнал на уровне элементов сигнала задают с помощью:

В этом уравнении r - блок N+L-1 принятых элементов сигнала, H - матрица свертки Топлица размера  , столбцы которой являются сдвинутыми во времени версиями импульсной характеристики канала h с расширением задержки
L
(версия разделенных промежутками элементов сигнала или подэлементов сигнала результирующих коэффициентов канала), v представляет белый гауссов шум вследствие шума соседних базовых станций и терминала, с - переданная последовательность элементов сигнала. Фильтр f эквалайзера элементов сигнала, который подавляет помехи в уравнении (7) является решением для:
, столбцы которой являются сдвинутыми во времени версиями импульсной характеристики канала h с расширением задержки
L
(версия разделенных промежутками элементов сигнала или подэлементов сигнала результирующих коэффициентов канала), v представляет белый гауссов шум вследствие шума соседних базовых станций и терминала, с - переданная последовательность элементов сигнала. Фильтр f эквалайзера элементов сигнала, который подавляет помехи в уравнении (7) является решением для:

где
 - матрице скремблирования и расширения размера
- матрице скремблирования и расширения размера  ,
,
p - последовательность элементов сигнала пилот-символов.
Следует заметить, что допускают, что имеются S пилот-символов на блок данных, и, что столбцы матрицы R являются сдвинутыми во времени версиями принятого сигнала r уровня элементов сигнала.
Аналогично G-многоотводному приемнику имеются несколько способов, чтобы генерировать фильтр эквалайзера элементов сигнала. Один способ может использовать параметрический подход, непараметрический подход и подход прямой адаптации. Параметрическая и непараметрическая формы отличаются (прежде всего) тем, как вычисляют матрицу A. Непараметрическая форма использует данные принятых элементов сигнала непосредственно, чтобы вычислять матрицу A с помощью:

В противоположность параметрическая форма работает вместо этого с импульсной характеристикой канала и мощностями обслуживающей базовой станции и белым гауссовым шумом. Составляющие матрицы A для параметрической формы могут быть записаны как:

где  - задержка k-го ответвления эквалайзера элементов сигнала,
- задержка k-го ответвления эквалайзера элементов сигнала,  - мощность обслуживающей базовой станции,
- мощность обслуживающей базовой станции,  - мощность белого гауссова шума. Подход прямой адаптации рассматривает проблему выравнивания как проблему адаптивной фильтрации. Она использует общеизвестный пилот-сигнал в качестве известной ссылки на цепочку ответвлений фильтра с использованием любого из общеизвестных алгоритмов адаптивного фильтра (LMS, RLS и т.д.).
- мощность белого гауссова шума. Подход прямой адаптации рассматривает проблему выравнивания как проблему адаптивной фильтрации. Она использует общеизвестный пилот-сигнал в качестве известной ссылки на цепочку ответвлений фильтра с использованием любого из общеизвестных алгоритмов адаптивного фильтра (LMS, RLS и т.д.).
Существующие параметрический и непараметрический подходы выравнивания имеют разные сильные и слабые стороны. Сильные и слабые стороны параметрического/непараметрического подходов G-многоотводного приемника описаны ниже. Допускают, что эти сильные стороны/слабые стороны также имеют силу для выравнивания элементов сигнала.
Сильной стороной параметрического подхода является то, что производительность (BER, BLER или пропускная способность) является относительно нечувствительной к скорости UE. Главной слабой стороной параметрического подхода является то, что он зависит от информации о канале, обнаруженной с помощью устройства поиска маршрута/устройства оценки задержки. Если эта информация является неправильной, тогда фактический цвет искажений не будет смоделирован, давая в результате ухудшение производительности.
Сильной стороной непараметрического подхода является то, что он является слепым методом. Не имеется специфичной модели для помех, таким образом, все помехи захватывают с помощью подхода оценки. Однако этот слепой подход также косвенно является слабой стороной. Слепые подходы обычно требуют значительного количества “обучающих” данных, чтобы хорошо выполняться. Пилот-канал имеет только 10 символов на интервал времени, таким образом, подход, основанный на пилот-сигнале, к оценке ковариации требует значительного сглаживания (фильтрации), чтобы работать хорошо. Сглаживание ограничивает эффективность подхода к низкой скорости. Подход неиспользованного кода является очень эффективным, если может быть идентифицирован набор неиспользованных кодов. Однако идентификация неиспользованных кодов в нисходящей линии связи является достаточно проблематичной.
Следует заметить, что имеется дополнительная слабая сторона, присущая существующим методам выравнивания. По-видимому, в них есть неуменьшаемый минимальный уровень ошибок (т.е. наименьший уровень производительности) для практических осуществлений приемника на основании существующего стандарта. Такое явление не имеет место для идеального приемника. Для того чтобы увеличить максимальные скорости данных, предложенные на практике, практический приемник должен более близко подражать производительности идеального приемника. Предполагают, что версия 9 WCDMA добавить больше пилот-символов, таким образом, чтобы приемники непараметрической и/или прямой адаптации выполнялись лучше. Настоящее изобретение предлагает альтернативу этому подходу, которая уменьшает максимальную пропускную способность только незначительно, но все же выполняется близко к производительности идеального приемника.
В двухпроходном G-многоотводном приемнике согласно настоящему изобретению первый проход вычисляет набор “приближенных” или “грубых” весовых коэффициентов объединения. Эти весовые коэффициенты объединения используют, чтобы когерентно объединять символы из одного или более кодов трафика. Объединенные значения повторно масштабируют в некоторую целевую мощность совокупности и принимают жесткие решения символов (т.е. без участия декодера). Жесткие решения символов затем используют в качестве пилот-символов демодуляции, а матрицу ковариации искажений повторно вычисляют непараметрическим способом с использованием этих пилот-символов демодуляции. Из повторно вычисленной матрицы ковариации искажений вычисляют набор весовых коэффициентов объединения второго прохода. Эти весовые коэффициенты объединения используют, чтобы когерентно объединять все данные трафика. При использовании мягких пилот-символов работа приемника является такой же, за исключением того, что весовые коэффициенты объединения первого прохода применяют только к мягким пилот-символам.
Фиг.13 - блок-схема последовательности этапов, иллюстрирующая иллюстративный вариант осуществления способа обработки, выполняемого с помощью двухпроходного приемника G-многоотводного приемника настоящего изобретения. На этапе 31 создают весовые коэффициенты объединения первого прохода. На этапе 32а значения со снятым расширением для одного или более кодов когерентно объединяют с использованием весовых коэффициентов объединения первого прохода. В качестве альтернативы процесс может перейти на этап 32b, где значения со снятым расширением, соответствующие мягким пилот-символам, когерентно объединяют, чтобы создать оценки символов. На этапе 33 оценки символов повторно масштабируют в некоторую целевую мощность совокупности. На этапе 34 принимают жесткие решения символов относительно повторно масштабированных оценок символов с учетом совокупности, используемой для передачи. На этапе 35 жесткие решения символов используют, чтобы непараметрическим способом оценить матрицу ковариации искажений. На этапе 36 вычисляют весовые коэффициенты объединения второго прохода с использованием оцененной матрицы ковариации искажений. На этапе 37 объединяют все данные трафика с использованием весовых коэффициентов объединения второго прохода.
Этот процесс может быть реализован разными способами по сценарию. Для сценариев однопотоковой SISO/SIMO/MIMO имеются два варианта. Аналогично для сценария MIMO имеются, по меньшей мере, два варианта. Каждый вариант описан в альтернативном варианте осуществления ниже.
Сначала будет описан вариант осуществления уровня символов однопотоковой SISO/SIMO. Для первого прохода демодуляции весовые коэффициенты объединения вычисляют с помощью:

где
В вышеприведенном уравнении  представляет вектор значений со снятым расширением обычных пилот-сигналов, соответствующих m-му интервалу пилот-символа в течение n-го интервала времени,
представляет вектор значений со снятым расширением обычных пилот-сигналов, соответствующих m-му интервалу пилот-символа в течение n-го интервала времени,  представляет вектор значений со снятым расширением трафика, соответствующих k-му интервалу символа трафика в течение n-го кода для с-го кода,
представляет вектор значений со снятым расширением трафика, соответствующих k-му интервалу символа трафика в течение n-го кода для с-го кода,  - число обычных пилот-символов на интервал времени,
- число обычных пилот-символов на интервал времени,  - число кодов трафика, используемое для оценки,
- число кодов трафика, используемое для оценки,  - число символов данных на интервал времени.
- число символов данных на интервал времени.
Допускают, что один код трафика используют, чтобы создать оценки символов (замечание: нижеследующее может быть легко распространено на множество кодов трафика). Весовые коэффициенты первого прохода  применяют к коду f трафика, чтобы создать оценки символов с помощью:
применяют к коду f трафика, чтобы создать оценки символов с помощью:

Эти оценки символов преобразуют в жесткие решения символов с помощью нормализации энергии оценки символов в некоторую целевую мощность совокупности (например, единицу), а затем выбирают точку совокупности, самую близкую к каждой оценке символа. Эта процедура может быть описана математически как:
где k(j) - значение j-й точки совокупности, взятой из набора точек S совокупности. Жесткие решения затем используют, чтобы составить более точную оценку матрицы ковариации искажений с помощью:
Более точную оценку матрицы ковариации искажений затем используют, чтобы вычислить весовые коэффициенты объединения второго прохода:


и весовые коэффициенты объединения второго прохода используют, чтобы когерентно объединить все данные трафика со снятым расширением.
Другой вариант осуществления является вариантом осуществления уровня элементов сигнала/уровня символов однопотоковой SISO/SIMO. Этот вариант осуществления является идентичным варианту осуществления уровня символов, за исключением того, что матрицу  , используемую для того, чтобы вычислить весовые коэффициенты объединения первого прохода
, используемую для того, чтобы вычислить весовые коэффициенты объединения первого прохода

вычисляют из данных уровня элементов сигнала. Непараметрический способ для реализации этого описан выше в разделе предшествующего уровня техники. Конкретно, принимают способ уравнения (9), в котором столбцы матрицы R являются сдвинутыми во времени версиями принятого сигнала r уровня элементов сигнала. Выполняют установку  , а затем вычисляют весовые коэффициенты объединения первого прохода. Остальная часть варианта осуществления имеет место на уровне символов и является идентичной варианту осуществления уровня символов однопотоковой SISO/SIMO.
, а затем вычисляют весовые коэффициенты объединения первого прохода. Остальная часть варианта осуществления имеет место на уровне символов и является идентичной варианту осуществления уровня символов однопотоковой SISO/SIMO.
Другой вариант осуществления является вариантом осуществления уровня символов двухпотоковой MIMO. Это описание допускает, что используют схему передачи MIMO D-TxAA, стандартизированную в версии 7 WCDMA, хотя изобретение является достаточно обобщенным, чтобы охватывать другие схемы MIMO 2×2. Для первого прохода демодуляции весовые коэффициенты объединения вычисляют с помощью:

где
В вышеприведенном уравнении  представляет вектор значений со снятым расширением обычных пилот-сигналов, соответствующих m-му интервалу пилот-символа в течение n-го интервала времени,
представляет вектор значений со снятым расширением обычных пилот-сигналов, соответствующих m-му интервалу пилот-символа в течение n-го интервала времени,  представляет вектор значений трафика со снятым расширением, соответствующих k-му интервалу символа трафика в течение n-го кода для с-го кода,
представляет вектор значений трафика со снятым расширением, соответствующих k-му интервалу символа трафика в течение n-го кода для с-го кода,  - число обычных пилот-символов на интервал времени,
- число обычных пилот-символов на интервал времени,  - число кодов трафика, используемое для оценки,
- число кодов трафика, используемое для оценки,  - число символов данных на интервал времени,
- число символов данных на интервал времени,  - m-й пилот-символ, переданный из антенны 1,
- m-й пилот-символ, переданный из антенны 1,  - m-й пилот-символ, переданный из антенны 2, а b
1 и b
2 - столбцы матрицы B предварительного кодирования, используемой для передачи потоков 1 и 2 (т.е. B=[b
1
b
2]).
- m-й пилот-символ, переданный из антенны 2, а b
1 и b
2 - столбцы матрицы B предварительного кодирования, используемой для передачи потоков 1 и 2 (т.е. B=[b
1
b
2]).
Заявители допускают, что один код трафика используют, чтобы создать оценки символов (замечание: нижеследующее может быть легко распространено на множество кодов трафика). Весовые коэффициенты объединения первого прохода  и
и  применяют к коду f трафика, чтобы создать оценки символов с помощью:
применяют к коду f трафика, чтобы создать оценки символов с помощью:

Эти оценки символов преобразуют в жесткие решения символов с помощью нормализации энергии оценки символов в некоторую целевую мощность совокупности, а затем выбирают точку совокупности, самую близкую к каждой оценке символа. Эта процедура может быть описана математически как:
где k(j) - значение j-й точки совокупности, взятой из набора точек S совокупности.
Затем жесткие решения используют, чтобы составить более точную оценку матрицы ковариации искажений с помощью
Более точную оценку матрицы ковариации искажений затем используют, чтобы вычислить весовые коэффициенты объединения второго прохода

и весовые коэффициенты объединения второго прохода используют, чтобы когерентно объединять все данные трафика со снятым расширением для обоих потоков.
Замечание: для первого прохода приемника  может быть получена с использованием параметрического представления G-многоотводного приемника. Для этого подхода имеется существенное преимущество, если используют модуляцию QAM.
может быть получена с использованием параметрического представления G-многоотводного приемника. Для этого подхода имеется существенное преимущество, если используют модуляцию QAM.
Другой вариант осуществления является вариантом осуществления уровня элементов сигнала/уровня символов двухпотоковой MIMO. Этот вариант осуществления является идентичным варианту осуществления уровня символов, за исключением того, что матрицу , используемую для того, чтобы вычислить весовые коэффициенты объединения первого прохода

вычисляют из данных уровня элементов сигнала. Непараметрический способ для реализации этого описан выше. Конкретно, принимают способ уравнения (9), в котором столбцы матрицы R являются сдвинутыми во времени версиями принятого сигнала r уровня элементов сигнала. Выполняют установку  , а затем вычисляют весовые коэффициенты объединения первого прохода. Остальная часть варианта осуществления имеет место на уровне символов и является идентичной варианту осуществления уровня символов двухпотоковой MIMO.
, а затем вычисляют весовые коэффициенты объединения первого прохода. Остальная часть варианта осуществления имеет место на уровне символов и является идентичной варианту осуществления уровня символов двухпотоковой MIMO.
Как поймут специалисты в данной области техники, новые концепции, описанные в настоящей заявке, могут быть модифицированы и изменены относительно большого разнообразия применений. Таким образом, объем патентуемого объекта не должен быть ограничен каким-либо из конкретных иллюстративных подходов, описанных выше, но вместо этого определяется нижеследующей формулой изобретения.


Изобретение относится к системам цифровой радиосвязи. Технический результат заключается в улучшении пропускной способности данных системы связи. Способ оценки параметров радиосигнала в радиоприемнике, принятого от передатчика, который обозначает определенные символы в последовательности данных указанного радиосигнала, посредством использования заданной альтернативной модуляции для указанных определенных символов, при этом способ содержит следующие этапы на которых: идентифицируют множество указанных определенных символов в последовательности данных, которые передают с более высокой надежностью, чем остальные символы в последовательности данных; демодулируют сначала указанные определенные символы, переданные с более высокой надежностью, чтобы сформировать мягкие пилот-символы, и используют мягкие пилот-символы в качестве известных символов, чтобы оценивать параметры принятого радиосигнала, и при этом мягкие пилот-символы имеют модуляцию более низкого порядка, чем модуляция более высокого порядка, использованная для остальных символов в последовательности данных. 2 н. и 14 з.п. ф-лы, 13 ил.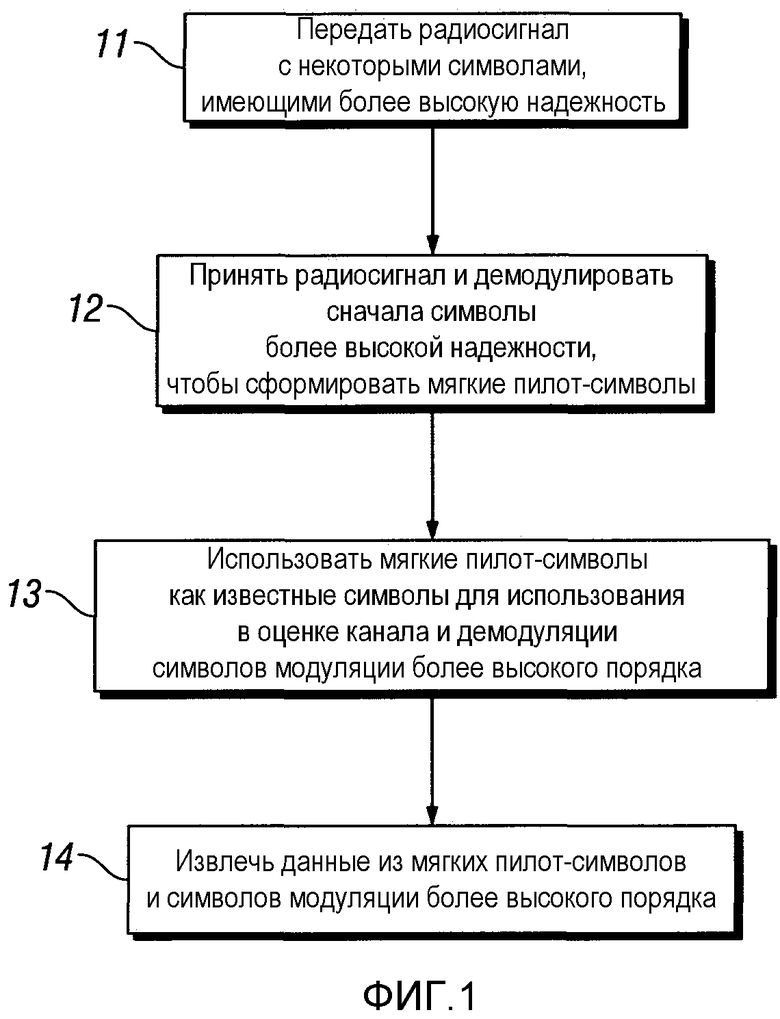
1. Способ оценки параметров радиосигнала в радиоприемнике (12), принятого от передатчика, который обозначает определенные символы в последовательности данных указанного радиосигнала, посредством использования заданной альтернативной модуляции для указанных определенных символов, при этом способ содержит следующие этапы при которых:
идентифицируют множество указанных определенных символов в последовательности данных, которые передают с более высокой надежностью, чем остальные символы в последовательности данных;
демодулируют (S12) сначала указанные определенные символы, переданные с более высокой надежностью, чтобы сформировать мягкие пилот-символы, и
используют (S13) мягкие пилот-символы в качестве известных символов, чтобы оценивать параметры принятого радиосигнала, и
при этом мягкие пилот-символы имеют модуляцию более низкого порядка, чем модуляция более высокого порядка, использованная для остальных символов в последовательности данных.
2. Способ по п.1, в котором этап (S13), на котором используют мягкие пилот-символы в качестве известных символов, также включает в себя этап, на котором используют мягкие пилот-символы в качестве известных пилот-символов, чтобы демодулировать символы с модуляцией более высокого порядка.
3. Способ по п.2, в котором пилот-символы являются символами модуляции с постоянной огибающей и этап, на котором используют мягкие пилот-символы в качестве известных символов, также включает в себя этап, на котором используют мягкие пилот-символы, чтобы устанавливать опорный указатель амплитуды для демодуляции символов с модуляцией более высокого порядка.
4. Способ по п.3, в котором мягкие пилот-символы модулируют с помощью квадратурной фазовой манипуляции (QPSK) или двоичной фазовой манипуляции (BPSK), а остальные символы в последовательности данных модулируют с помощью 16-квадратурной амплитудной модуляции (16QAM) или 64QAM.
5. Способ по п.1, дополнительно содержащий этап, на котором предварительно сохраняют в приемнике (12) информацию, указывающую предварительно определенные местоположения в последовательности для мягких пилот-символов, причем упомянутые местоположения определяют с точки зрения времени, частоты и кода.
6. Способ по п.5, дополнительно содержащий этап, на котором предварительно сохраняют в приемнике (12) информацию, указывающую тип модуляции для мягких пилот-символов.
7. Способ по п.1, дополнительно содержащий этап, на котором принимают сигнализацию из передатчика, указывающую местоположения в последовательности для мягких пилот-символов, причем упомянутые местоположения определяют с точки зрения времени, частоты и кода.
8. Способ по п.7, дополнительно содержащий этап, на котором принимают сигнализацию из передатчика, указывающую тип модуляции для мягких пилот-символов.
9. Способ по п.1, дополнительно содержащий этап, на котором извлекают данные как из мягких пилот-символов, так и символов с модуляцией более высокого порядка.
10. Радиоприемник для оценки параметров принятого радиосигнала, принятого от передатчика, который обозначает определенные символы в последовательности данных радиосигнала посредством использования заданной альтернативной модуляции для указанных определенных символов, причем упомянутый радиоприемник содержит:
средство для идентификации множества символов в последовательности, которую передают с более высокой надежностью, чем остальные символы в последовательности,
средство для демодуляции сначала идентифицированного множества символов, чтобы сформировать мягкие пилот-символы, и
средство для использования мягких пилот-символов в качестве известных символов, чтобы оценить параметры принятого радиосигнала, в соответствии с чем мягкие пилот-символы обеспечивают пропускную способность данных, и
при этом мягкие пилот-символы имеют модуляцию более низкого порядка, чем модуляция более высокого порядка, использованная для остальных символов в последовательности данных.
11. Радиоприемник по п.10, в котором мягкие пилот-символы модулируют с помощью квадратурной фазовой манипуляции (QPSK) или двоичной фазовой манипуляции (BPSK), а остальные символы в последовательности модулируют, например, с помощью 16-квадратурной амплитудной модуляции (16QAM) или 64QAM.
12. Радиоприемник по п.11, в котором пилот-символы являются символами модуляции с постоянной огибающей и средство для использования мягких пилот-символов в качестве известных символов включает в себя средство для использования мягких пилот-символов, чтобы устанавливать опорный указатель амплитуды для демодуляции символов модуляции более высокого порядка.
13. Радиоприемник по п.10, дополнительно содержащий средство хранения для предварительного сохранения информации, указывающей тип модуляции для мягких пилот-символов и предварительно определенные местоположения в последовательности для мягких пилот-символов, причем упомянутые местоположения определяют с точки зрения времени, частоты и кода.
14. Радиоприемник по п.10, дополнительно содержащий средство для приема сигнализации из передатчика, указывающей местоположения в последовательности для мягких пилот-символов, причем упомянутые местоположения определяют с точки зрения времени, частоты и кода.
15. Радиоприемник по п.10, дополнительно содержащий средство для приема сигнализации из передатчика, указывающей тип модуляции для мягких пилот-символов и предварительно определенные местоположения в последовательности для мягких пилот-символов, причем упомянутые местоположения определяют с точки зрения времени, частоты и кода.
16. Радиоприемник по п.10, дополнительно содержащий средство для извлечения данных как из мягких пилот-символов, так и из символов с модуляцией более высокого порядка.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ ОЦЕНКИ АМПЛИТУДЫ И ФАЗЫ В БЕСПРОВОДНОЙ СИСТЕМЕ СВЯЗИ | 2000 |
|
RU2271068C2 |
| СПОСОБ КВАЗИКОГЕРЕНТНОГО ПРИЕМА СИГНАЛА | 1999 |
|
RU2174743C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 5265128 A, 23.11.1993 | |||

