ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в общем относится к системе и способу демодуляции модулированного по фазе или модулированного по частоте сигнала.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
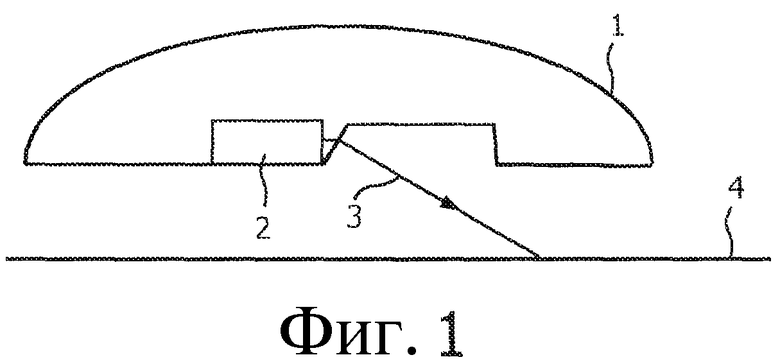
На фиг. 1 схематично проиллюстрирована оптическая компьютерная мышь 1, содержащая лазерное устройство 2. Лазерное устройство реализовано в виде полупроводникового лазера, как известно само по себе. Мышь перемещают по поверхности 4, например по столу. От источника питания, (ради простоты не показан) лазерное устройство 2 принимает электрический ток, и в результате лазер 2 испускает лазерный пучок 3 с конкретной длиной волны, который отражается поверхностью 4. Часть лазерного света отражается обратно в сторону лазера. От этого отраженного лазерного света возможно получить сигнал, представляющий скорость перемещения мыши 1 относительно поверхности 4.
На фиг. 2 показано схематичное представление, иллюстрирующее принцип измерения. Лазер 2 содержит полупрозрачное переднее зеркало 11 и полупрозрачное заднее зеркало 12 с лазерной средой (полупроводниковое тело) между указанными двумя зеркалами. Отмечено, что зеркала 11, 12 показаны в виде двумерных структур, но на практике зеркала 11, 12 будут иметь многоуровневую структуру.
Лазерный свет внутри лазерной среды 13 указан как основной лазерный свет L0. Часть лазерного света проходит переднее зеркало 11 и формирует выходной пучок 3; этот свет также показан как L1. Аналогично часть лазерного света проходит заднее зеркало 12 и формирует измерительный пучок 5; этот свет также указан как L2.
Объект 4 может быть рассмотрен как составляющий внешнее зеркало с рассеивающими свойствами и отражает падающий пучок L1, это показано как отраженный пучок L3. На чертеже отраженный пучок L3 показан в виде одномерного пучка, образующего угол с падающим пучком L1, но на практике отраженный пучок L3 будет иметь конкретное пространственное распределение и часть этого отраженного пучка L3 будет направлена в сторону переднего зеркала 11. Таким образом, объект 4 может быть рассмотрен как определяющий внешний резонатор вместе с передним зеркалом 11.
При стационарном состоянии свет L0 внутри лазерной среды 13 образовывает стоячую волну. Аналогично, свет L1 и L3 во внешнем резонаторе образовывает стоячую волну, которая посредством переднего зеркала 11 интерферирует со светом L0 внутри лазерной среды 13. Измерительный пучок 5 имеет постоянную интенсивность.
Предположим, что объект 4 перемещается от лазера 2. Это значит, что длина резонатора интерференции между передним зеркалом 11 и объектом 4 увеличивается, то есть число стоячих волн, вмещающихся между передним зеркалом 11 и объектом 4, увеличивается. Следовательно, состояние интерференции в расположении переднего зеркала 11 изменяется от полностью конструктивного до полностью деструктивного и обратно. Это оказывает влияние на состояние интерференции в лазерной среде 13, которая в свою очередь оказывает влияние на интенсивность света L5 измерительного пучка 5. В результате, этот свет L5 имеет флуктуации интенсивности на частоте fD, которая пропорциональна скорости перемещения объекта 4 относительно лазера 2, то есть его компонента, вдоль оптической оси. Должно быть ясно, что измерительный пучок 5 может быть обнаружен фотодатчиком и что его выходной сигнал может быть обработан процессором сигналов для того, чтобы обработать эти флуктуации интенсивности и вычислить из них скорость объекта. Отмечено, что указанная частота fD равна доплеровской частоте.
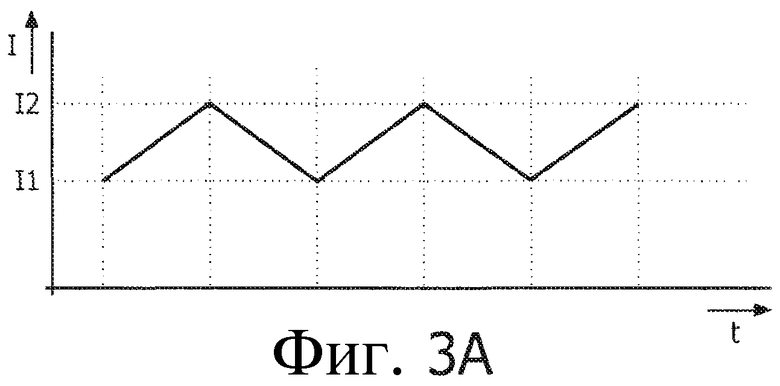
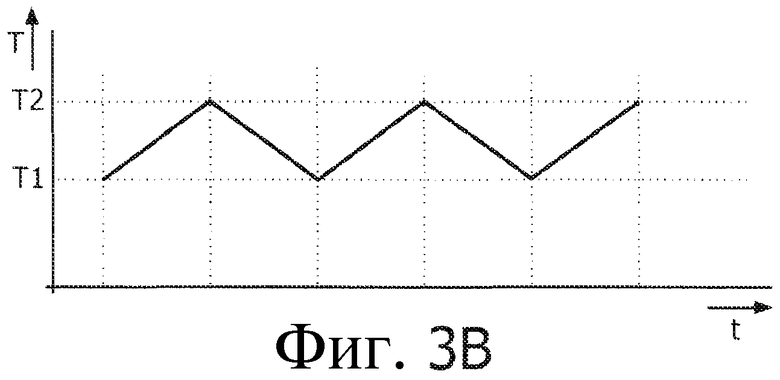
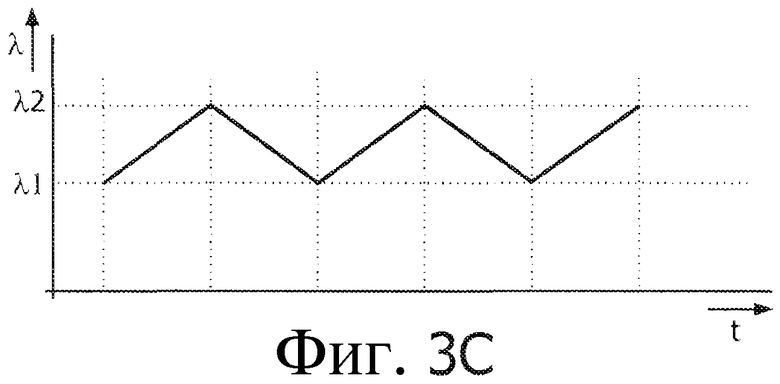
Было предложено решить эту проблему посредством снабжения лазера током лазера с треугольной модуляцией, как проиллюстрировано на фиг. 3A. Ток лазера изменяется линейным образом между двумя экстремальными значениями I1 и I2, имеющими один и тот же знак. В течение первой половины периода тока ток I лазера увеличивается с I1 до I2, степень изменения R1=dI/dt будучи по существу постоянной. В течение другой половины периода тока ток I лазера уменьшается с I2 до I1, степень изменения R2=dI/dt, будучи по существу постоянной, обычно R2=-R1. Увеличение/уменьшение тока лазера вызывает увеличение/уменьшение температуры лазера (как проиллюстрировано на фиг. 3B), которая в свою очередь вызывает увеличение/уменьшение длины волны лазерного света (как проиллюстрировано на фиг. 3C) с по существу постоянной степенью изменения dλ/dt, в которой λ означает длину волны лазера. Результаты могут быть объяснены, как указано ниже. Предположим, что объект перемещается в сторону от лазера, таким образом, длина резонатора интерференции между передним зеркалом 11 и объектом 4 увеличивается. Если магнитуда тока и, следовательно длина волны лазера увеличивается, частота флуктуаций интенсивности измерительного света L5 уменьшается; это показано пиком f1 на частотном спектре на фиг. 3D. Уменьшенная частота может даже стать равной нулю, если D/λ останется постоянной, в которой D означает расстояние между передним зеркалом 11 и объектом 4. И наоборот, если длина волны лазера уменьшается, то частота флуктуаций интенсивности измерительного света L5 увеличивается; это показано пиком f2 в частотном спектре на фиг. 3B. Отмечено, что сдвиг |fD-f1| равен сдвигу |fD-f2|. Спектр флуктуаций интенсивности измерительного света L5, таким образом, показывает два пика fl и f2, как схематично проиллюстрировано на фиг. 3B. С другой стороны, если объект перемещается в сторону лазера, то снова получен частотный спектр с двумя пиками, но теперь получена более низкая частота в течение периодов, когда уменьшалась величина тока. Таким образом, направление перемещения может быть определено посредством определения, является ли частота выше в течение периодов, когда величина тока уменьшается, или в течение периодов, когда величина тока увеличивается. Должно быть ясно, что эта информация может быть относительно легко извлечена из измерительного сигнала посредством соответственно запрограммированного процессора сигналов.
Для более подробного объяснения сделана ссылка на патент США № 7339683, содержимое которого включено в настоящий документ по ссылке.
В этом отношении проблема состоит в том, что определение частоты требуется в течение периодов, так что ток увеличивается и в течение периодов, когда ток уменьшается, что дает в результате 2 дискретные частоты. Таким образом, измерения для измерения первой частоты всегда начинаются в начале периодов, когда ток повышается, и они всегда заканчиваются в конце этих периодов, в то время как измерения для измерения второй частоты всегда начинаются в начале периодов, когда ток уменьшается, и они всегда заканчиваются в конце этих периодов. Таким образом, эти измерения регулярно прерываются, что ведет к прерываниям получения данных и общей потере информации. Однако для высокоточных сенсоров желательно быть способными (почти) постоянно отслеживать сигнал перемещения без этих прерываний. Например, посредством отслеживания фазы сигнала перемещения. Таким образом, требуется способ, который позволяет постоянное отслеживание сигнала перемещения, в то же время также предоставляющий определение направления.
В общем заявлено, сигнал может содержать множественные составляющие сигнала, и настоящее изобретение имеет целью предоставление процессора сигналов, способного распознавать точную частоту конкретной составляющей сигнала в принятом сигнале. Обычно PLL (контур фазовой синхронизации) используется в ситуации, где частота частотной составляющей уже приблизительно известна. Чтобы позволить PLL синхронизироваться по этой частоте, известно начинать с PLL имеющего относительно большой диапазон частот и затем уменьшать диапазон частот, в то же время удерживая составляющую сигнала в пределах диапазона. Однако существуют случаи, где принятый сигнал фактически содержит множественные частотные составляющие, частотное расстояние которых может быть относительно мало и точная частота которых приблизительно заранее не известна; описанная во введении ситуация является примером такого случая. Если используется традиционный способ PLL с изначально большим диапазоном частот, то существует вероятность, что PLL синхронизируется по неправильной частоте.
Патентная заявка США 2003/01835315 раскрывает частотный анализатор, который содержит:
комплексный фильтр, используемый для сэмплирования частот; тем самым входная частота фильтруется для извлечения составляющей либо положительной частоты, либо отрицательной частоты; частотный дискриминатор, который принимает вход от комплексного фильтра; тем самым частотный дискриминатор может вычислить демодулированную частоту на основе разницы фаз между выходом двух последовательно демодулированных частот от комплексного фильтра, используя обратную тригонометрическую функцию.
Конкретной целью настоящего изобретения является предоставление устройства, способного надежно демодулировать принятый сигнал в такой ситуации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению система демодуляции для демодуляции модулированного по фазе сигнала содержит:
1) цифровой демодулятор, содержащий цифровой FLL (контур частотной синхронизации), который содержит управляемый генератор опорной частоты, цифровой демодулятор, способный выполнять комплексную демодуляцию;
2) цифровое устройство FFT, способное выполнять комплексное быстрое преобразование Фурье (FFT);
3) память, содержащую информацию, определяющую ожидаемую частотную характеристику модулированного по фазе сигнала;
4) анализирующее устройство.
Указанная информация отражает тот факт, что принятый модулированный по фазе сигнал сгенерирован известным процессом и что известный процесс дает в результате сигналы, имеющие частотную характеристику, которая может быть описана посредством заранее заданной формулы. В случае оптического сенсора перемещения, как описано выше, частотная характеристика может быть описана посредством ряда Бесселя.
Входной сигнал системы демодуляции подвергается комплексной демодуляции цифровым демодулятором. Выходной сигнал демодулятора имеет частотный спектр, который содержит первичный пик и по меньшей мере один, но обычно множество вторичных пиков. Первичный пик имеет частоту, соответствующую частоте, которую демодулятор распознает в качестве составляющей(их) основного сигнала. Однако может быть так, что демодулятор синхронизировался по неправильной частоте, что значит, что генератор опорной частоты настроен на неправильную частоту.
Цифровое устройство FFT принимает указанную информацию от указанной памяти, и, таким образом, на основе ожидаемой частотной характеристики цифровое устройство FFT выполняет комплексное быстрое преобразование Фурье (FFT) выходного сигнала демодулятора.
Выходной сигнал устройства FFT предоставляется анализирующему устройству. Информация, содержащаяся в выходном сигнале устройства FFT, позволяет анализирующему устройству определять, является ли первичный пик во входном сигнале устройства FFT правильным пиком в соответствии с ожидаемой частотной характеристикой. Если обнаружено, что первичный пик является неправильным, то информация, содержащаяся в выходном сигнале устройства FFT, также позволяет анализирующему устройству определять разницу Δf между текущей частотой указанного первичного пика и правильной частотой. Основываясь на этой информации, анализирующее устройство предоставляет сигнал ошибки цифровому демодулятору, который в ответ адаптирует частоту его генератора опорной частоты посредством указанной разницы Δf, так чтобы подстроиться на правильную частоту.
Таким образом, очень быстро, цифровой модулятор синхронизируется по правильной частоте. Теперь его выходной сигнал также предоставляется второму анализирующему устройству. Информация, содержащаяся в выходном сигнале демодулятора, позволяет второму анализирующему устройству вычислять скорость и направление перемещения.
Изобретение дополнительно относится к способу демодуляции модулированного по фазе входного сигнала (Si), содержащему этапы:
- выполнения комплексного перемножения модулированного по фазе входного сигнала (Si) с аппроксимацией обратной величины фазовой модуляции;
- анализа частотного спектра демодулированного умноженного сигнала, произведенного комплексным перемножением модулированного по фазе входного сигнала (Si).
Дополнительные уточнения предпочтений упомянуты в зависимых пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты, признаки и преимущества настоящего изобретения будут дополнительно объяснены посредством нижеследующего описания одного или более предпочтительных вариантов осуществления со ссылкой на чертежи, в которых одни и те же номера позиций указывают одни и те же или подобные части и в которых:
на фиг. 1 схематично показана оптическая компьютерная мышь с лазерным детектором для обнаружения перемещения мыши относительно поверхности;
на фиг. 2 показано графическое изображение, схематично иллюстрирующее принцип измерения, лежащий в основе лазерного детектора перемещения;
на фиг. 3A схематично проиллюстрирован ток лазера с треугольной модуляцией;
на фиг. 3B схематично проиллюстрирована температура лазера, вызванная модулированным током лазера;
на фиг. 3C схематично проиллюстрирована длина волны лазера, возникшая вследствие температуры модулируемого лазера;
на фиг. 3D схематично проиллюстрирован частотный спектр выходного сигнала лазерного детектора в случае перемещения.
на фиг. 4 и 5 показаны графики, иллюстрирующие фазовую модуляцию;
на фиг. 6-7 показаны графики, иллюстрирующие частотные спектры модулированного по фазе сигнала;
на фиг. 8 показана блок-схема, иллюстрирующая систему демодуляции согласно настоящему изобретению;
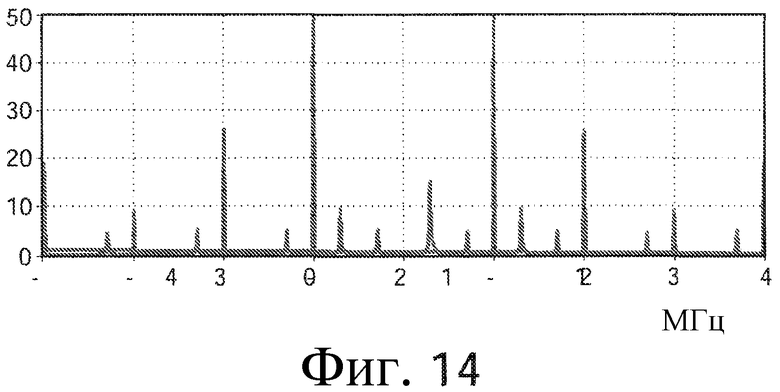
на фиг. 9-14 показаны графики, иллюстрирующие частотные спектры после демодуляции согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже будет дано объяснение демодуляции модулированной по фазе несущей для определения несущей частоты и знака несущей частоты. Будет показано, что может быть определена частота сигнала с частотой сигнала и примерно известной фазовой модуляцией, в том числе знак частоты со значениями частоты, достаточно близкими к нулю. Это осуществляется за счет комплексной демодуляции сигналов с фазой, которая является противоположной фазовой модуляции сигнала. Функция демодуляции или амплитуда могут быть выбраны, в частности, для частотных диапазонов конкретного сигнала. В то время как существует устойчивость к рассогласованию между функциями модуляции и демодуляции фазы, это рассогласование должно быть ограничено так, что в общем, функция модуляции или амплитуда могут быть также адаптированы для частотных диапазонов разных сигналов. Частота сигнала может быть определена после демодуляции, например, с помощью контура частотной синхронизации (FLL) и/или с помощью CFFT. CFFT, в частности, полезно для приблизительного определения частоты сигнала для поддержки процесса синхронизации FLL и для определения того, совпадают ли амплитуды модуляции и демодуляции фазы.
Модулированный по фазе сигнал
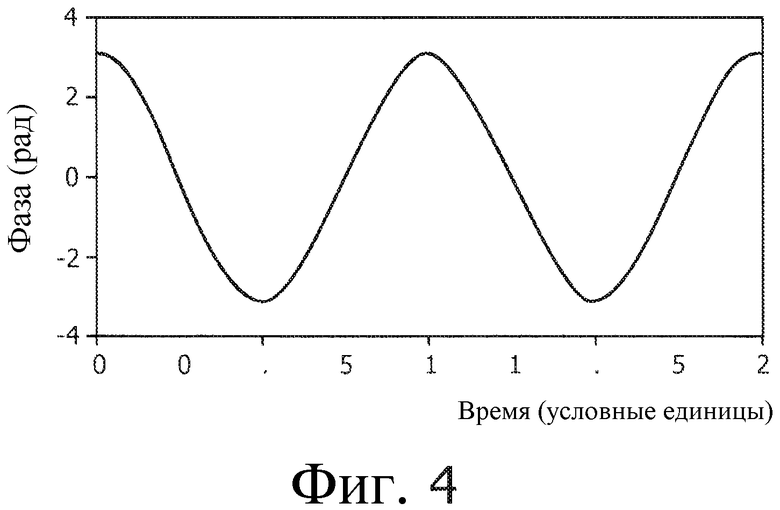
Допустим, модулированный по фазе сигнал, состоящий из несущего сигнала, имеющего несущую частоту ω, фаза которой модулируется согласно p(t)=P*cos(ωm*t),
где P является амплитудой модуляции в радианах, и ωm является частотой модуляции.
На фиг. 4 показан график, представляющий пример такой фазовой модуляции для большой фазовой модуляции, где P=π и fm=ωm/2π=1 МГц.
Результирующий модулированный по фазе сигнал может быть описан формулой: f(t)=cos(ω*t+p(t)).
Пример этого сигнала показан на фиг. 5, с несущей частотой f=ω/2π=300 кГц.
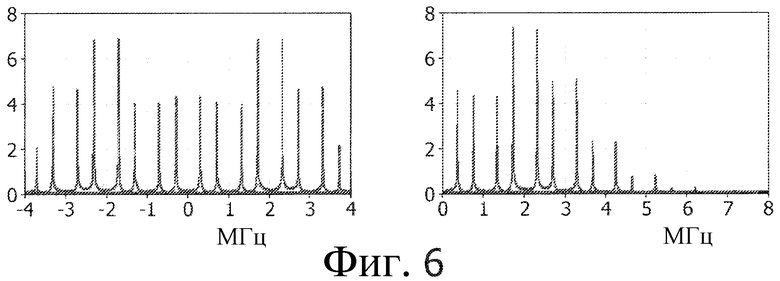
Как известно из теории связи, такой модулированный по фазе сигнал имеет спектр, который определен рядом функций Бесселя, и для данного выше примера на фиг. 6 показан спектр, как найдено из комплексного преобразования Фурье. Спектр комплексного FFT показан на левом графике на фиг. 6, в то время как правый график на фиг. 6 показывает спектр FFT. Следует отметить, что спектр комплексного FFT содержит положительные и отрицательные частоты; в реальной области могут быть измерены только позитивные частоты, что приводит к спектру, показанному справа.
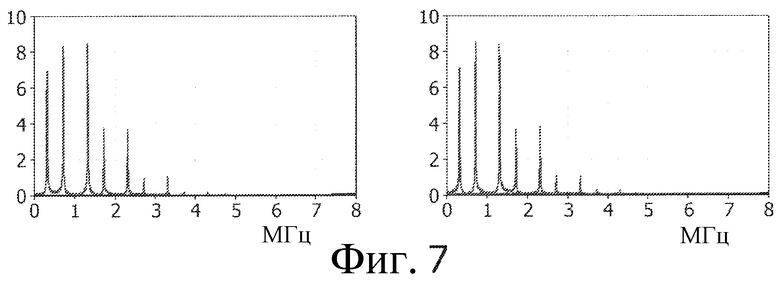
Высота различных пиков в спектре определяется глубиной P фазовой модуляции. На фиг. 7 показан спектр FFT для примера с P=0,5*π и ω=300 кГц (слева) и ω=-300 кГц (справа), соответственно. Видно, что эти спектры не дают информации о знаке частоты, который соответствует направлению перемещения объекта в примере, рассмотренном во введении. Отмечено, что это может быть также распознано в спектре CFFT на фиг. 6, так как этот спектр является симметричным относительно нуля. Более того, видно, что самые сильные пики возникают при частотах, отличающихся от доплеровской частоты в 300 кГц, которая распознается как имеющая меньшие пики.
Настоящее изобретение имеет целью предоставление системы демодуляции, которая способна принимать модулированный по фазе сигнал описанного выше типа, имеющий частотные спектры, подобные описанным выше спектрам, и которая способна выполнять такую операцию, как предоставление выходного сигнала, также показанного в качестве демодулированного сигнала, частотный спектр которого имеет чистый сигнал на несущей частоте и четко проводит различение между положительной и отрицательной частотой модуляции. Блок-схема такой системы 100 демодуляции, предложенная настоящим изобретением, показана на фиг. 8. Система 100 демодуляции имеет вход 101, принимающий модулированный по фазе входной сигнал Si.
Фазовая демодуляция
Система 100 демодуляции содержит комплексный демодулятор 110, имеющий первый вход 111 и второй вход 112. На свой первый вход 111 комплексный демодулятор 110 принимает модулированный по фазе входной сигнал Si. На свой второй вход 112 комплексный демодулятор 110 принимает сигнал SPMI, который содержит информацию о фазовой модуляции входного сигнала Si. Комплексный демодулятор 110 сконфигурирован для того, чтобы использовать эту информацию для выполнения комплексного перемножения входного сигнала Si с аппроксимацией обратной величины фазовой модуляции согласно следующей формуле: g(t)=f(t)*exp(-i*p(t)*u),
где u является коэффициентом, равным 1 или почти равным 1.
Для примера функции f(t) данной выше, это приведет к:
g(t)=0,5*{exp[i*(ω*t+p(t))]+exp[-i*(ω*t+p(t))]}*exp(-i*p(t)*u)
или
g(t)=0,5*{exp[i*(ω*t+p(t)*(1-u))]+exp[-i*(ω*t+p(t)*(1+u))]}.
На фиг. 9 показаны итоговые спектры g(t), для трех разных значений P, для примера, где несущая частота составляет 300 кГц и u=0,75 (показывает 25% ошибок при оценке u). Частота модуляции fm составляет 1 МГц. Частота дискретизации составляет 16 МГц, то есть преобразование Фурье обеспечивает выход в диапазоне от -8 до 8 МГц, но на фиг. 9 показан диапазон только от -4 до 4 МГц.
Ясно видно, что самый сильный пик соответствует положительной несущей частоте в 300 кГц; вертикальные пунктирные линии показывают пики частот ряда Бесселя, принадлежащих этому самому сильному пику. Вертикальная стрелка показывает пик частоты, имеющий отрицательную несущую частоту в -300 кГц; эта частота будет показана как противоположная несущая частота. Оставшиеся (неотмеченные) пики являются частотами ряда Бесселя вблизи этой противоположной несущей частоты.
Все спектры являются результатом комплексных преобразований Фурье, так как входной сигнал является комплексным сигналом. Самый высокий пик в спектрах соответствует доплеровской частоте (несущая частота модулированного по фазе входного сигнала). Существуют побочные пики, созданные остаточной фазовой модуляцией (1-u)*p(t), относительный уровень этих побочных пиков к основному пику определяется с помощью (1-u)*P. Когда u=1, боковые полосы частот отсутствуют. Знак (1-u)*P определяет фазу побочных пиков. Таким образом, для определения и управления u и/или P может быть использован спектр. В противоположность самому высокому пику существует второй пик на противоположной (отрицательной) частоте; этот пик слабее и имеет больше побочных пиков в результате более глубокой фазовой модуляции этого пика с амплитудой фазы (1+u)*P. За счет увеличения P второй пик может быть полностью подавлен и спектр рассредоточен на более широком диапазоне.
На фиг. 10 показан результирующий спектр g(t) для того же примера, но с u=1 (идеальная модуляция) и P=π. Доплеровский пик является самым сильным и не вызывает никаких полос боковых частот. Противоположный доплеровский пик более чем на 20 дБ слабее и имеет много полос боковых частот, рассредоточенных по широкому частотному диапазону. Таким образом, спектр вблизи противоположного доплеровского пика может быть также использован для определения глубины фазовой модуляции.
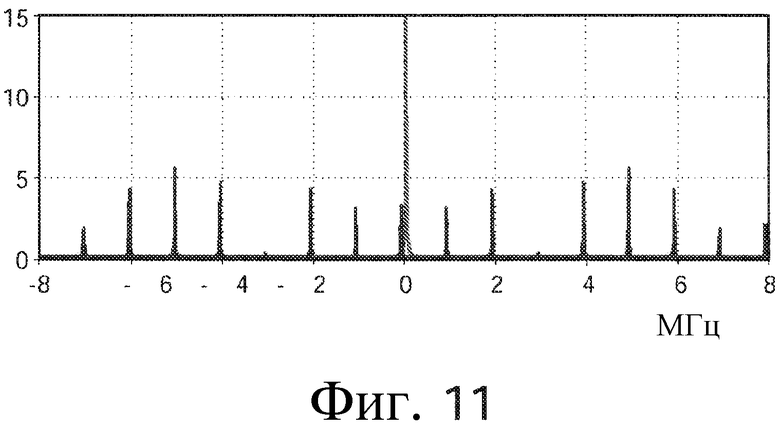
Демодуляция низкочастотных сигналов
Особенный случай возникает, когда несущая частота является близкой к нулю. В этом случае несущая частота и противоположная несущая частота практически перекрываются, так же как их полосы боковых частот. Однако широкий спектр противоположной частоты еще делает возможным оценку глубины модуляции. На фиг. 11 показан график, сравнимый с показанным на фиг. 10, для примера, где несущая частота (доплеровская частота) составляет 50 кГц. Для такой же ситуации на фиг. 11 показана увеличенная версия этого спектра для диапазона от -1 до +1 МГц. В то время как CFFT с низкой разрешающей способностью может только определить, что несущая частота (то есть скорость) является низкой, CFFT с достаточной разрешающей способностью может еще определить знак частоты (то есть направление перемещения).
Таким образом, показано, что демодуляция модулированного по фазе сигнала с помощью комплексного вращения с обратной величиной фазовой модуляции или аппроксимация этого позволяет определить как частоту сигнала, так и знак частоты. В случае лазерного смешивающего сенсора эта частота будет являться доплеровской частотой. Фазовая модуляция может быть большой, такой большой, что частота сигнала не может больше определяться посредством рассмотрения спектра до комплексной демодуляции. Хорошо известно, что знак частоты не может быть определен на основании спектра реального сигнала, но при комплексной демодуляции итоговый спектр делает возможным определение знака частоты.
Таким образом, устройство 100 демодуляции содержит устройство 130 анализа спектра, принимающее выходной сигнал от комплексного демодулятора 110, и предоставляющее в качестве выхода на первый выход 131 основную частоту демодулированного сигнала (соответствующую несущей частоте входного сигнала Si) и знак частоты. Это устройство 130 анализа спектра может быть реализовано в качестве устройства CFFT (комплексное быстрое преобразование Фурье), но это не единственный применяемый инструмент. PLL или FLL является еще одним вариантом, который может быть использован в качестве альтернативы или параллельно с CFFT. PLL или FLL имеет на входе смеситель (комплексное вращение), который перемножает сигнал с ожидаемой частотой сигнала (доплеровская частота в случае смешивающего датчика). Это просто включить в данный этап перемножение с противоположностью той частоты. Затем оба результата могут быть пропущены через фильтр нижних частот для удаления частот, далеких от ожидаемой частоты (например, ±10 кГц на вышеуказанной фигуре). Затем амплитуды обоих сигналов могут сравнить и, так как известно, что основной сигнал намного сильнее, чем нежелательный обратный сигнал, любая синхронизация по слабому нежелательному сигналу может быть незамедлительно обнаружена и предотвращена.
Когда диапазон частот фильтра достаточно большой для прохода обоих пиков (то есть, когда ожидаемая доплеровская частота находится в рамках диапазона частот фильтра), тогда оба пика будут обнаружены на каждом выходе (то есть на выходе с положительной частотой доплеровской демодуляции и на выходе с отрицательной частотой доплеровской модуляции). Для диапазона доплеровских частот разница в амплитуде между выходами фильтра будет все еще не достаточна для определения того, какой знак является правильным. Для нижних доплеровских частот выходы являются неразличимыми и может быть выбран один из выходов, например выход с демодуляцией положительной доплеровской частоты. Фаза комплексного сигнала на выходе затем может быть отслежена. Эта фаза добавляется к фазе частотной доплеровской демодуляции, чтобы в результате получить общую фазу сигнала входного сигнала. Ошибка при выборе положительной или отрицательной доплеровской частоты для демодуляции выхода будет автоматически устранена за счет этого способа, так что для всех частот сигналов, от отрицательных до позитивных, PLL или FLL может точно отследить фазу.
Когда сигнал (доплеровская частота) очень высок, FLL может также ошибочно синхронизироваться по побочным пикам. Чтобы это предотвратить, полезно использовать CFFT параллельно с FLL, чтобы определить правильную частоту сигнала и помочь FFL синхронизироваться по правильному пику. При действии импульса CFFT, в частности, полезно, чтобы «подтолкнуть» частоту демодуляции FLL к правильному значению, когда хорошая оценка частоты демодуляции неизвестна до импульса.
Комплексная демодуляция устойчива к ошибкам в амплитуде демодуляции фазы, но наилучшие результаты получаются, если амплитуда демодуляции фазы близка к амплитуде фазы модулированного сигнала. Следовательно, устройство 130 анализа спектра имеет второй выход 132, предоставляющий сигнал Se ошибки, который представляет оценку разницы между действительной амплитудой фазы модулированного сигнала и амплитудой демодуляции фазы. Ошибка в амплитуде демодуляции фазы может быть оценена из фазы полосы боковых частот и амплитуды спектра вблизи основной частоты или из фазы полосы боковых частот и амплитуды спектра вблизи нежелательного отрицательного изображения основной частоты. Амплитуда пика нежелательной инвертированной частоты относительно пика основной частоты может также использоваться для получения информации о демодуляции. Контроллер (140) модуляции принимает сигнал Se ошибки и использует этот сигнал для генерирования информационного сигнала (Spmi) о фазовой модуляции для комплексного демодулятора (110).
Необходимо отметить, что тогда как амплитуда демодуляции фазы должна более или менее совпадать с амплитудой модуляции фазы, нет необходимости в том, чтобы это достигалось за счет управления амплитудой демодуляции фазы. В качестве альтернативы амплитуда модуляции фазы может быть управляемой. При практической реализации измерительный модуль может содержать передающий лазер, равно как и принимающий датчик, и, таким образом, такой модуль объединяет функции и управления лазером, и анализа сигнала. Посредством управления лазером можно управлять амплитудой модуляции фазы в большинстве случаев с помощью управления амплитудой переменного тока, наложенного на ток смещения лазера.
Таким образом, будет существовать схема управления, такая как:
Спектральный анализ => модуляция амплитуды => спектр => спектральный анализ.
Предотвращение синхронизации по нежелательным составляющим сигнала
Для применения в смешивающем датчике необходимо отметить, что в реальности, когда смешивающий лазерный датчик является модулированным по фазе, в лазерном свете обычно также существует модулированная по амплитуде составляющая. Этот сигнал возникает при частоте фазовой модуляции. На фиг. 13 показан соответствующий частотный спектр, данный для примера (частота сигнала 300 кГц, частота модуляции 1 МГц, фазовая модуляция и демодуляция π/2).
Спектр показывает сильные нежелательные пики при 0 и при кратном частоте модуляции в 1 МГц. FLL мог бы подвергнуться вредному воздействию за счет близости нежелательного пика в результате модуляции сигнала. Это может быть подавлено за счет сдвига частоты фазовой модуляции (и, таким образом, ее спектра) в зависимости от доплеровской частоты, такой, при которой доплеровская частота находится не близко от нежелательного пика. Когда знак частоты сигнала известен (как, например, для датчика с перемещающимся на большой скорости объектом), модуляция может быть также полностью отключена.
Таким образом, устройство 130 анализа спектра может быть сконфигурировано для того, чтобы использовать частоту сигнала для определения того, какая частота фазовой модуляции желательна для получения спектра, который легко анализировать с помощью CFFT и по которому легко синхронизироваться для FLL. CFFT может также использоваться для определения диапазона частоты сигнала, так чтобы можно было выбрать подходящую частоту модуляции. При третьем выходе 133 устройство 130 анализа спектра предоставляет сигнал Sf, представляющий собой желательную частоту фазовой модуляции, и это также принимается контроллером 140 модуляции и используется для генерирования информационного сигнала Spmi о фазовой модуляции для комплексного демодулятора 110. Таким образом, информационный сигнал Spmi о фазовой модуляции может содержать информацию для установки частоты фазовой модуляции и/или амплитуды фазовой модуляции.
Для очень низкой скорости остаточная амплитудная модуляция приводит к пику, близкому к 0 Гц. Этот пик может быть подавлен за счет выбора предназначенной амплитуды демодуляции фазы. Для данного примера (при u=1) при остаточной AM модуляции, например, при амплитуде демодуляции фазы 1,22π, пик в результате AM модуляции может быть погашен. Надлежащая амплитуда демодуляции фазы для погашения остаточной AM модуляции зависит от конфигурации системы. Более того, возможны другие измерения, такие как погашение остаточной AM модуляции до демодуляции сигнала. Для устранения эффекта остаточной AM модуляции при низких частотах может использоваться комбинация таких измерений.
На фиг. 14 показан пример случая, где амплитуда демодуляции фазы и функция выбраны, в частности, для получения хорошего подавления нежелательной AM модуляции во входном сигнале. Так как функции фазовой модуляции и демодуляции должны совпадать, это является примером случая, где фазовая модуляция будет управляться для получения этого совпадения скорее, чем фазовая демодуляция. Это также является примером случая, где для низкочастотного сигнала (или низкой доплеровской частоты в смешивающем датчике) выбирается конкретная фазовая модуляция, и для более высоких скоростей предпочтительна (например, при сигнале около 1 МГц, где вышеуказанный спектр показывает сильные нежелательные пики) другая частота фазовой модуляции и демодуляции и/или амплитуда.
Подводя итог, настоящее изобретение предоставляет систему 100 демодуляции для демодуляции модулированного по фазе входного сигнала Si. Система содержит комплексный демодулятор 110, имеющий первый вход 111 для приема модулированного по фазе входного сигнала Si и сконфигурированный для выполнения комплексного умножения этого сигнала с аппроксимацией инверсии фазовой модуляции; и устройство 130 анализа спектра, принимающее демодулированный сигнал, полученный в результате умножения (сигнал умножения) комплексным демодулятором (110), и способное анализировать частотный спектр демодулированного сигнала, полученного в результате умножения.
В то время как изобретение было проиллюстрировано и описано подробно в чертежах и вышеприведенном описании, для специалиста в данной области техники должно быть ясно, что такие иллюстрация и описание следует учитывать как иллюстративные или примерные и неограничивающие. Изобретение не ограничено раскрытыми вариантами осуществления; а скорее, возможны несколько вариаций или модификаций в пределах охраняемого объема изобретения, как описано в прилагаемой формуле изобретения.
Например, контроллер 140 модуляции может быть соединен с комплексным демодулятором или устройством анализа спектра.
Другие изменения в раскрытых вариантах осуществления изобретения могут быть понятны и осуществлены специалистами в данной области техники при применении заявленного изобретения, при изучении чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключает других элементов или этапов и использование элементов или частей в единственном числе не исключают их множественности. Один процессор или другой блок может выполнять функции нескольких элементов перечисленных в формуле изобретения. Сам факт, что определенные меры перечислены в разных зависимых пунктах формулы изобретения, не указывает на то, что сочетания этих мер нельзя использовать с пользой. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый вместе или как часть другого аппаратного обеспечения, но также может распространяться в других формах, как, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылки в формуле изобретения не следует толковать в качестве ограничения объема.
В вышеуказанном настоящее изобретение объяснено с учетом блок-схем, которые иллюстрируют функциональные блоки устройства согласно настоящему изобретению. Это сделано для понимания того, что один или более этих функциональных блоков могут быть реализованы в аппаратном обеспечении, где функция такого функционального блока выполняется отдельными аппаратными компонентами, но также возможно, что один или более этих функциональных блоков реализованы в программном обеспечении, так что функция такого функционального блока выполняется одной или более строками компьютерной программы или программируемым устройством, таким как микропроцессор, микроконтроллер, процессор цифровой обработки сигналов и так далее.







Система демодуляции сигнала относится к области демодуляции модулированного по фазе или по частоте сигнала и может использоваться для обнаружения движения объекта. Достигаемый технический результат - распознавание точной частоты конкретной составляющей сигнала в принятом сигнале с множественными составляющими. Система демодуляции сигнала содержит: комплексный демодулятор (110), имеющий первый вход (111) для приема модулированного по фазе входного сигнала (Si) и сконструированный для выполнения комплексного перемножения этого сигнала с аппроксимацией обратной величины фазовой модуляции; устройство (130) анализа спектра, принимающее демодулированный умноженный сигнал, произведенный комплексным демодулятором (110), и способное анализировать частотный спектр демодулированного умноженного сигнала, контроллер (140) модуляции. 3 н. и 12 з.п. ф-лы, 14 ил.
1. Система (100) демодуляции для демодуляции модулированного по фазе входного сигнала (Si), содержащая:
комплексный демодулятор (110), имеющий первый вход (111) для приема модулированного по фазе входного сигнала (Si) и сконфигурированный для выполнения комплексного умножения этого сигнала с аппроксимацией инверсии фазовой модуляции;
устройство (130) анализа спектра, принимающее демодулированный сигнал умножения, сформированный комплексным демодулятором (110), и способное анализировать частотный спектр демодулированного сигнала умножения.
2. Система демодуляции по п.1, в которой устройство (130) анализа спектра содержит устройство CFFT.
3. Система демодуляции по п.1, в которой устройство (130) анализа спектра содержит устройство контура фазовой синхронизации (PLL) или устройство контура частотной синхронизации (FLL).
4. Система демодуляции по п.1, в которой устройство (130) анализа спектра содержит устройство PLL или устройство FLL параллельно с устройством CFFT.
5. Система демодуляции по п.1, в которой устройство (130) анализа спектра способно определять оценку разницы между действительной амплитудой фазы модулированного входного сигнала (Si) и амплитудой демодуляции фазы, и предоставлять сигнал (Se) ошибки, который представляет собой эту оценку;
при этом система демодуляции дополнительно содержит контроллер (140) модуляции, принимающий сигнал (Se) ошибки, и использует этот сигнал для генерирования информационного сигнала (Spmi) о фазовой модуляции для комплексного демодулятора (110);
и в которой комплексный демодулятор (110) использует информационный сигнал о фазовой модуляции (Spmi) для определения или адаптации аппроксимации инверсии фазовой модуляции.
6. Система демодуляции по п.5, в которой ошибка в амплитуде демодуляции фазы оценивается на основании фазы полосы боковых частот и амплитуды спектра вблизи основной частоты.
7. Система демодуляции по п.5, в которой ошибка в амплитуде демодуляции фазы оценивается на основании фазы полосы боковых частот и амплитуды спектра вблизи нежелательного негативного изображения основной частоты.
8. Система демодуляции по п.7, в которой амплитуда пика нежелательной инвертированной частоты относительно пика основной частоты используется для получения информации о демодуляции.
9. Система демодуляции по п.5, в которой частота фазовой модуляции (и, таким образом, ее спектр) сдвигается в зависимости от основной частоты для того, чтобы увеличить расстояние между пиком основной частоты и пиком нежелательной частоты.
10. Система демодуляции по п.5, в которой устройство (130) анализа спектра сконфигурировано для того, чтобы использовать частоту сигнала для определения желаемой частоты фазовой модуляции;
в которой устройство (130) анализа спектра сконфигурировано для того, чтобы предоставить сигнал (Sf), представляющий желаемую частоту фазовой модуляции;
причем этот сигнал (Sf) также принимается контроллером (140) модуляции и используется для генерирования информационного сигнала (Spmi) о фазовой модуляции для комплексного демодулятора (110).
11. Детектор (1) движения, выполненный с возможностью обнаружения направления движения объекта (4), перемещающегося относительно детектора, детектор содержит:
- лазер (2), содержащий полупрозрачное переднее зеркало (11), полупрозрачное заднее зеркало (12) и полупроводниковое тело лазера (13) между указанными двумя зеркалами, лазер сконфигурирован для вывода выходного лазерного пучка (3) с выходным лазерным светом (L1) на его переднее зеркало (11) и вывода измерительного пучка (5) с измерительным светом (L2) на его заднее зеркало (12), лазер дополнительно сконфигурирован для того, чтобы позволить по меньшей мере части отраженного света (L3) интерферировать с основным светом (L0) внутри тела лазера (13);
- управляемый источник (51) тока лазера для снабжения лазера током (I) лазера, так чтобы генерировать основной лазерный свет (L0) внутри тела лазера (13);
- контроллер (52) для управления источником (51) тока лазера;
- фотодетектор (55) для обнаружения по меньшей мере части измерительного света (L2) и подачи измерительного сигнала (Sm) в контроллер;
причем контроллер (52) сконфигурирован для управления источником (51) тока лазера, так что он модулирует ток (I) лазера для того, чтобы модулировать длину волны выходного лазерного света (L1);
и при этом контроллер (52) сконфигурирован для анализа частотного спектра обнаруженного света (L2) совместно с модулированным током (I) лазера для того, чтобы определить скорость и направление перемещения объекта (4);
при этом контроллер (52) содержит систему демодуляции по любому из предыдущих пунктов формулы изобретения.
12. Детектор движения по п.11, в котором контроллер (52) сконфигурирован для управления источником (51) тока лазера, так чтобы модулировать глубину модуляции модулированного сигнала.
13. Детектор движения по п.12, в котором контроллер (52) сконфигурирован для настройки глубины модуляции модулированного сигнала, так чтобы согласовывать с желаемой глубиной модуляции.
14. Детектор движения по п.11, в котором контроллер (52) сконфигурирован для управления глубиной фазовой модуляции измерительного сигнала.
15. Способ демодуляции модулированного по фазе входного сигнала (Si), содержащий этапы:
- выполнения комплексного умножения модулированного по фазе входного сигнала (Si) с аппроксимацией инверсии фазовой модуляции;
- анализа частотного спектра демодулированного сигнала умножения, сформированного комплексным умножением модулированного по фазе входного сигнала (Si).

