Изобретение относится к области радиотехники, в частности к радиолокации с непрерывным излучением, когда приемные антенны значительно удалены от передающих, и может быть использовано для определения дальности, радиальной скорости и углового положения целей при их значительном перемещении за период модуляции зондирующего сигнала большой длительности или за интервал облучения цели пачкой когерентных сигналов.
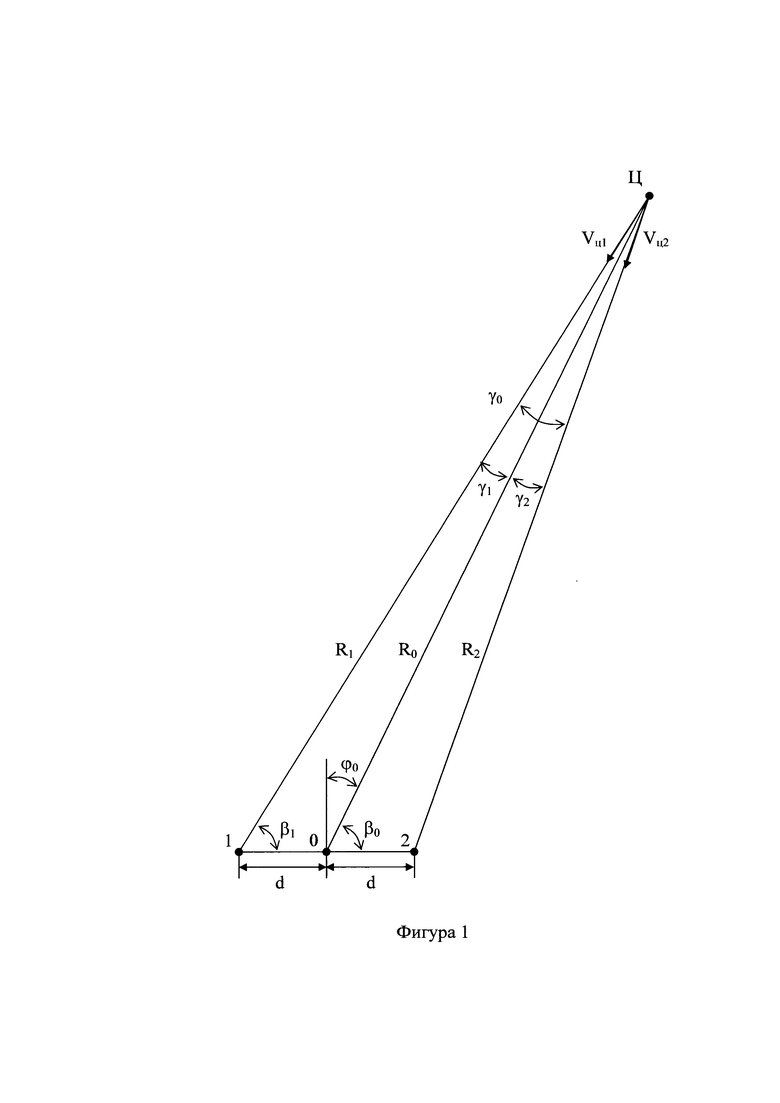
Наиболее близким по технической сущности к заявляемому способу является способ определения координат цели в РЛС с непрерывным излучением [Патент Российской Федерации №2699240, МПК G01S 13/42, опубл. 04.09.2019. Бюл. №25], основанный на зондировании цели (на фигуре 1 обозначена точкой Ц) широкополосным сигналом с линейной частотной модуляцией (ЛЧМ), приеме, усилении и демодуляции отраженных сигналов с двух разнесенных в пространстве на расстояние 2d антенн (фигура 1), формировании набора опорных сигналов с различной крутизной ЛЧМ, перемножении каждого сигнала из набора с сигналом биений одного из каналов, вычислении комплексных спектров полученных результатов перемножений, поиске частотной составляющей с максимальной амплитудой в вычисленных комплексных спектрах, определении ее фазы ϕ1 и положения, характеризующегося соответствующими номером опорного сигнала nс и значением ее частоты fRд, определении по значению nс опорного сигнала из набора и соответствующую ему радиальную скорость цели Vц, вычислении по значению fRд дальности до цели Rц, компенсации дополнительной ЛЧМ в сигнале другого канала путем умножения на опорный сигнал с номером nс, вычислении комплексного спектра компенсированного сигнала, определении значения фазы ϕ2 спектральной составляющей на частоте fRд, вычислении по разности фаз углового положения цели Θ.
Недостатки способа заключается в том, что, во-первых, производится одно измерение радиальной скорости цели, что ограничивает точность ее измерения, во-вторых, при значительном расстоянии d между передающей (на фигуре 1 обозначена точкой 0) и первой (второй) приемной антенной (на фигуре 1 обозначена точкой 1 (2)) вычисляется уже не значение дальности до цели R0, а половина суммы дальностей R1+R0 (R2+R0), что приводит к систематической ошибке измерения дальности цели R0, в-третьих, однозначное измерение угловой координаты цели обеспечивается только при соотношении расстояния между фазовыми центрами приемных антенн 2d к длине волны λ излучения сигнала 2d/λ<1/2,], λ=с/ƒ0, где ƒ0 - начальная частота ЛЧМ сигнала, излучаемого в пространство передающей антенной; с -скорость распространения электромагнитного излучения. В случае практической реализации, например, приемных зеркальных антенн с размером зеркала много больше λ, выполнить условие 2d/λ<1/2 невозможно. Ширина интервала однозначного измерения углового положения цели Δϕ=arcsin(λ/2d) [Пестряков В.Б. Фазовые радиотехнические системы (основы статистической радиотехники). М.: Советское радио, 1968. 468 с. С. 31. Так, например при λ=0,035 м и d=3 м интервал однозначного измерения углового положения Δϕ лежит в пределах ±1,35°, что недостаточно для большинства практических задач.
Технический результат данного изобретения состоит в повышении точности определения пространственного положения цели за счет усреднения результатов измерения радиальной скорости цели в двух приемных каналах, исключения систематической погрешности при измерении дальности цели и в обеспечении однозначного определения ее углового положения при соотношении расстояния между фазовыми центрами приемных антенн 2d к длине волны излучения λ много больше 1/2.
Технический результат достигается тем, что в известном способе, заключающемся в зондировании цели сигналом с линейной частотной модуляцией, приеме отраженного сигнала первой антенной, демодуляции принятого сигнала, формировании набора опорных сигналов с различной крутизной линейной частотной модуляции, диапазон значений которой выбирается исходя из априорного диапазона радиальных скоростей цели, а количество опорных сигналов - точностью определения ее радиальной скорости, перемножении каждого опорного сигнала с демодулированным сигналом, формировании набора спектров результатов перемножения, определении номера спектра nс1 и частоты ƒRд1, соответствующих спектральной составляющей с максимальной амплитудой, вычислении по найденной nс1 - крутизны (скорости изменения частоты) дополнительной (вторичной) ЛЧМ μ21, по которой вычисляется радиальная скорость цели Vц1 и соответствующая ей доплеровская частота ƒд1, согласно изобретению, рассчитывают среднее значение радиальной скорости цели Vц по измерениям в первом Vц1 и во втором Vц2 приемных каналах, которые выполняют по аналогичным процедурам. По значениям ƒRд1 и ƒRд2 вычисляют суммарные дальности до цели R1+R0 и R2+R0, вычисляют скорость Vц2 и соответствующую ей доплеровскую частоту ƒд2, переносят на опорную частоту демодулированный сигнал одного из приемных каналов, формируют сигнал SФД(tм), амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз сигнала на опорной частоте и демодулированного сигнала другого приемного канала, определяют знак и величину UЧД отклонения частоты модуляции сигнала SФД(tм) от опорной частоты, по которому и по значениям 
 и
и  вычисляют дальность
вычисляют дальность  и однозначное угловое положение
и однозначное угловое положение  цели.
цели.
Сущность способа состоит в следующем. Согласно прототипа широкополосный сигнал с линейной частотной модуляцией, характеризуемой периодом модуляции Тм, начальной частотой ƒ0 и шириной спектра (девиацией) Δƒс, излучается в пространство передающей антенной [Рязанцев Л.Б., Купряшкин И.Ф., Лихачев В.П., Пеливан М.А., Прохорский Р.А. Способ определения координат цели в РЛС с непрерывным излучением. Патент РФ №2699240, МПК G01S 13/42, опубл. 04.09.2019. Бюл. №25]:

где 
 и θ0 - крутизна (скорость изменения частоты) ЛЧМ и начальная фаза сигнала соответственно.
и θ0 - крутизна (скорость изменения частоты) ЛЧМ и начальная фаза сигнала соответственно.
Отраженный от цели сигнал принимается двумя приемными антеннами, разнесенными друг от друга на расстояние 2d (фигура 1), где его усиливают и демодулируют путем умножения на сигнал передатчика (1), в результате чего в первом и втором приемных каналах формируются сигналы, частота биений которых пропорциональна дальностям до цели R1+R0 и R2+R0, соответственно:


где  и
и  - дальностная частота демодулированного сигнала, принятого первой и второй антенной соответственно;
- дальностная частота демодулированного сигнала, принятого первой и второй антенной соответственно; 
 R0 - расстояние до цели от передающей антенны;
R0 - расстояние до цели от передающей антенны;  и
и  - доплеровская частота сигнала, принятого первой и второй антенной соответственно;
- доплеровская частота сигнала, принятого первой и второй антенной соответственно;  и
и  - крутизна (скорость изменения частоты) дополнительной (вторичной) ЛЧМ демодулированных сигналов первого и второго каналов соответственно; R1 и R2 - дальность до цели от первой и от второй приемных антенн соответственно; Vц1 и Vц2 - радиальная скорость цели относительно первой и второй приемной антенн соответственно.
- крутизна (скорость изменения частоты) дополнительной (вторичной) ЛЧМ демодулированных сигналов первого и второго каналов соответственно; R1 и R2 - дальность до цели от первой и от второй приемных антенн соответственно; Vц1 и Vц2 - радиальная скорость цели относительно первой и второй приемной антенн соответственно.
При движении цели частота сигналов  и
и  изменяется пропорционально изменению дальности до нее, что обусловливает появление дополнительной ЛЧМ в демодулированных сигналах обоих приемных каналов, крутизна μ21 и μ22 которых пропорциональна радиальным скоростям цели Vц1 и Vц2 [Купряшкин И.Ф., Лихачев В.П, Рязанцев Л.Б. Малогабаритные многофункциональные РЛС с непрерывным частотно-модулированным излучением М.: Радиотехника, 2020. 280 с. С.145].
изменяется пропорционально изменению дальности до нее, что обусловливает появление дополнительной ЛЧМ в демодулированных сигналах обоих приемных каналов, крутизна μ21 и μ22 которых пропорциональна радиальным скоростям цели Vц1 и Vц2 [Купряшкин И.Ф., Лихачев В.П, Рязанцев Л.Б. Малогабаритные многофункциональные РЛС с непрерывным частотно-модулированным излучением М.: Радиотехника, 2020. 280 с. С.145].
Вычисление скорости цели осуществляют путем оценки крутизны дополнительной ЛЧМ μ21 сигнала  и μ22 сигнала
и μ22 сигнала  Для этого формируют набор опорных сигналов
Для этого формируют набор опорных сигналов  с различными значениями крутизны ЛЧМ
с различными значениями крутизны ЛЧМ  где
где 
 и
и  - границы априорного интервала значений параметра μ21 и μ22, определяемые минимальной Vцmin и максимальной Vцmax радиальными скоростями целей;
- границы априорного интервала значений параметра μ21 и μ22, определяемые минимальной Vцmin и максимальной Vцmax радиальными скоростями целей;  ; σ - точность оценки параметров μ21 и μ22, определяемой, исходя из заданной точности оценки радиальной скорости цели. Затем каждый сигнал из набора перемножают с сигналами
; σ - точность оценки параметров μ21 и μ22, определяемой, исходя из заданной точности оценки радиальной скорости цели. Затем каждый сигнал из набора перемножают с сигналами  и
и  вычисляют комплексные спектры полученных результатов перемножений и находят номера спектров nс1 и nс2, содержащих спектральную составляющую с максимальной амплитудой, и значение частоты fRдl и ƒRд2 этих спектральных составляющих (фигура 2,в), т.е.
вычисляют комплексные спектры полученных результатов перемножений и находят номера спектров nс1 и nс2, содержащих спектральную составляющую с максимальной амплитудой, и значение частоты fRдl и ƒRд2 этих спектральных составляющих (фигура 2,в), т.е.


где  - оператор преобразования Фурье по переменной tм.
- оператор преобразования Фурье по переменной tм.
По найденным значениям nс1 и nс2 вычисляют оценки радиальной скорости цели:

и суммарные дальности цели:

где
 и
и
смещение по дальности, обусловленное доплеровским частотным сдвигом  и
и  соответственно.
соответственно.
Для повышения точности измерения радиальной скорости цели  осуществляют расчет среднего значения по измерениям
осуществляют расчет среднего значения по измерениям  и
и  в первом и во втором приемных каналах:
в первом и во втором приемных каналах:

Для исключения систематической погрешности при измерении дальности цели R0 и устранения неоднозначности определения ее углового положения  осуществляют перенос на опорную частоту fоп демодулированного сигнала одного из приемных каналов, например, сигнал (2):
осуществляют перенос на опорную частоту fоп демодулированного сигнала одного из приемных каналов, например, сигнал (2):

Далее формируют сигнал, амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз сигнала (9) и демодулированного сигнала второго приемного канала (3):

который подается на вход частотного углового дискриминатора, реализованного на основе настроенного на опорную частоту fоп полосового фильтра [Коновалов Г.Ф. Радиоавтоматика: Учеб. для вузов по спец. «Радиоавтоматика». - М.: Высш. шк., 1990. С.335. с. 39-41], на выходе которого формируется напряжение, пропорциональное величине и имеющее знак отклонения частоты сигнала (10) от опорной частоты:

где ∝ - знак пропорциональности.
В результате косвенно измеряются параметры:




Вводя новые переменные: 
 и исходя из известных тригонометрических соотношений для произвольного треугольника [Сурина О.П., Якунина О.В. Элементарная геометрия. Планиметрия: Уч. пособ. - Пенза: Изд. ПТУ. - С.107. С.22]
и исходя из известных тригонометрических соотношений для произвольного треугольника [Сурина О.П., Якунина О.В. Элементарная геометрия. Планиметрия: Уч. пособ. - Пенза: Изд. ПТУ. - С.107. С.22] 
 и
и  составляется система уравнений:
составляется система уравнений:

Учитывая, что  получают
получают  и оценивают дальности:
и оценивают дальности:


Расстояние до цели вычисляют как медиану произвольного треугольника [Ельчанинова Г.Г., Мельников Р.А. Элементарная математика. Часть 4. Геометрия. Начальные сведения. Треугольник: учебное пособие. - Елец: ЕГУ им. И.А. Бунина, 2016. - 92 с. С. 34]:

Исходя из уравнений (16) вычисляют:


Допуская справедливость равенства  при R0 >> d, определяют угловое положение цели, исходя из известного соотношения
при R0 >> d, определяют угловое положение цели, исходя из известного соотношения  [Сурина О.П., Якунина О.В. Элементарная геометрия. Планиметрия: Уч. пособ. - Пенза: Изд. ПТУ. - С.107. С.22]:
[Сурина О.П., Якунина О.В. Элементарная геометрия. Планиметрия: Уч. пособ. - Пенза: Изд. ПТУ. - С.107. С.22]:

Затем вычисляют угловое положение цели относительно нормали к плоскости приемных антенн (фигура 1):

Аргумент арккосинуса в (23) не содержит соотношения d/λ и не выходит за пределы ±1, т.е. угловое положение цели  определяется однозначно в секторе Δϕ0=±90°.
определяется однозначно в секторе Δϕ0=±90°.
Полосовой фильтр частотного детектора должен иметь полосу много больше, чем частота поступающего на его вход сигнала 
 Если при Tм=1 мс, d=50 м, Δƒс=1 ГГц, β=90° максимальная величина
Если при Tм=1 мс, d=50 м, Δƒс=1 ГГц, β=90° максимальная величина  кГц (определяется произведением максимальной взаимной задержки сигналов, принятых первой и второй антеннами, определяемой расстоянием 2d, и крутизной ЛЧМ), то целесообразно выбрать fоп=10 МГц и реализовать в частотном детекторе полосовой фильтр, например, настроенный на fоп=10 МГц с полосой пропускания 6,67 МГц. В таком случае полосовой фильтр будет иметь добротность Q=1.5, которую достаточно просто реализовать на практике.
кГц (определяется произведением максимальной взаимной задержки сигналов, принятых первой и второй антеннами, определяемой расстоянием 2d, и крутизной ЛЧМ), то целесообразно выбрать fоп=10 МГц и реализовать в частотном детекторе полосовой фильтр, например, настроенный на fоп=10 МГц с полосой пропускания 6,67 МГц. В таком случае полосовой фильтр будет иметь добротность Q=1.5, которую достаточно просто реализовать на практике.
Полагается, что дистанция до цели R0 много больше расстояния между приемными антеннами 2d, поэтому радиальные скорости цели в направлении первой и второй приемной антенн примерно равны, следовательно, процедура усреднения по двум значениям радиальной скорости цели  и
и  полученных в первом и втором каналах, снижает погрешность определения этих параметров [РМГ 64-2003. ГСИ. Обеспечение эффективности измерений при управлении технологическими процессами. Методы и способы повышения точности измерений. 2005-01-01], т.е. повышает точность определения ее пространственного положения.
полученных в первом и втором каналах, снижает погрешность определения этих параметров [РМГ 64-2003. ГСИ. Обеспечение эффективности измерений при управлении технологическими процессами. Методы и способы повышения точности измерений. 2005-01-01], т.е. повышает точность определения ее пространственного положения.
При условии d=50 м, β1=43° γ1=2°, R0=1013 м, R1=977 м измеренная дальность цели (при большом отношении сигнал/шум) способом-прототипом составит 995 м, а абсолютная систематическая погрешность измерения дальности цели способом-прототипом составит 18 м, что при Δƒс=1 ГГц составит 120 элементов разрешения по дальности. Следовательно, устранение систематической погрешности измерения дальности цели улучшает точность определения пространственного положения цели.
Таким образом, заявляемый способ реализуем, и в отличие от прототипа, обеспечивает в РЛС с непрерывным излучением однозначное определение углового положения цели при любом соотношении расстояния между фазовыми центрами приемных антенн 2d к длине волны λ, исключает систематическую погрешность при измерении дальности цели и повышает точность измерения ее радиальной скорости, что улучшает точность определения ее пространственного положения.
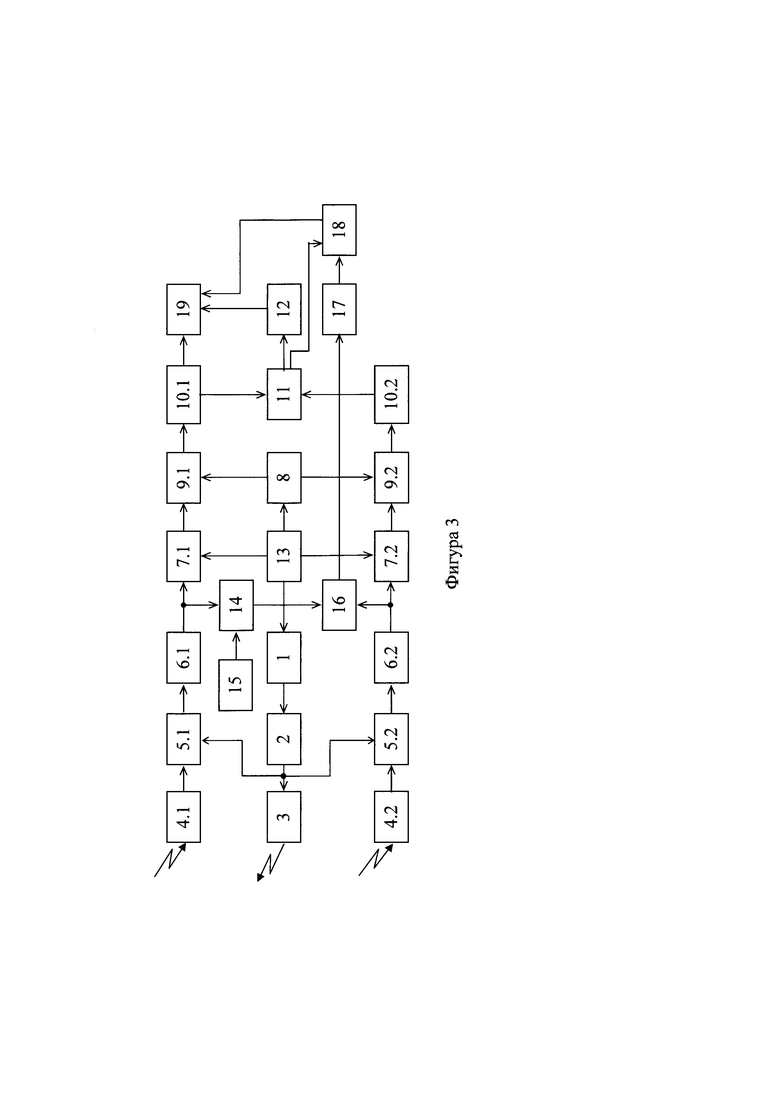
На фигуре 3 представлена структурная схема устройства для осуществления способа определения дальности, скорости и углового положения цели в РЛС с непрерывным излучением.
Устройство состоит из частотного модулятора 1, генератора высокой частоты 2, передающей антенны 3, первой приемной антенны 4.1, второй приемной антенны 4.2, первого умножителя сигналов 5.1, второго умножителя сигналов 5.2, первого усилителя низкой частоты 6.1, второго усилителя низкой частоты 6.2, первого запоминающего устройства 7.1, второго запоминающего устройства 7.2, банка опорных сигналов 8, первого устройства перемножения сигналов 9.1, второго устройства перемножения сигналов 9.2, первого анализатора спектра 10.1, второго анализатора спектра 10.2, вычислителя 11, вычислителя радиальной скорости цели 12, устройства синхронизации 14, устройства вывода 13, смесителя 14, опорного гетеродина 15, фазового детектора 16, частотного детектора 17, вычислителя дальности и углового положения цели 18 и устройства вывода 19.
Представленный на фигуре 3 вариант устройства, реализующего предлагаемый способ определения дальности, скорости и углового положения цели в РЛС с непрерывным излучением, функционирует следующим образом. Частотный модулятор 1 в начале каждого периода модуляции зондирующего сигнала по сигналу устройства синхронизации 13 формирует ЛЧМ сигнал, который после переноса на высокую частоту генератором высокой частоты 2 излучается в пространство передающей антенной 3. Приемные антенны 4.1 и 4.2 принимают отраженные от цели сигналы, которые поступают на первые входы умножителей 5.1 и 5.2, где демодулируются путем умножения на зондирующий сигнал с выхода генератора высокой частоты 2, после чего усиливаются усилителями низкой частоты 6.1 и 6.2 и запоминаются в запоминающих устройствах 7.1 и 7.2. В банке опорных сигналов 8 хранится предварительно сформированный набор опорных сигналов с различными значениями крутизны ЛЧМ μ2. По окончанию периода модуляции устройство синхронизации 13 выдает сигнал, по которому запоминающее устройство 7.1 выдает запомненный сигнал (2), а банк опорных сигналов 8 - набор опорных сигналов на первое устройство перемножения сигналов 9.1, в котором осуществляется перемножение запомненного сигнала с опорными, а запоминающее устройство 7.2 выдает запомненный сигнал на второе устройство перемножения сигналов 9.2. Набор результатов перемножения с выхода первого устройства перемножения сигналов 9.1 через первый анализатор спектра 10.1 поступает на вычислитель 11, где производится поиск частотной составляющей с максимальной амплитудой, определение ее частоты ƒRд1 и номера nс1, характеризующего принадлежность частотной составляющей к конкретному опорному сигналу из набора с различными μn, с последующим вычислением по найденным значениям ƒRд1 и nс1 дальности (R1-R0) и радиальной скорости цели Vц1, аналогично тому, как это делается в способе прототипе. Одновременно с этим во втором устройстве перемножения сигналов 9.2, осуществляется перемножение запомненного сигнала с опорными. Набор результатов перемножения с выхода второго устройства перемножения сигналов 9.2 через второй анализатор спектра 10.2 поступает на вычислитель 11, где для второго приемного канала аналогично процедурам, выполняемым в первом приемном канале, производится поиск частотной составляющей с максимальной амплитудой, определение ее частоты ƒRд2, номера nс2, характеризующего принадлежность частотной составляющей к конкретному опорному сигналу из набора с различными μn, с последующим вычислением по найденным значениям ƒRд2 и nс2 дальности (R2+R0) и радиальной скорости Vц2 цели. Значения радиальных скоростей цели  и
и  поступают из вычислителя 11 в вычислитель радиальной скорости цели 12, где происходит вычисление среднего значения радиальной скорости цели
поступают из вычислителя 11 в вычислитель радиальной скорости цели 12, где происходит вычисление среднего значения радиальной скорости цели 
С помощью фазового детектора 16 формируют сигнал, амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз, которая равна разности несущих частот сигналов с выхода второго УНЧ 6.2 и с выхода первого УНЧ 6.1, который предварительно в смесителе 14 переносят на опорную частоту сигнала, формируемого опорным гетеродином 15.
На выходе частотного детектора 17, настроенного на опорную частоту, формируют напряжение UЧД, знак и величина которого соответствуют отклонению частоты модуляции сигнала с выхода фазового детектора 16 от опорной частоты.
Из вычислителя 11 и частотного детектора 17 значения  ,
,  ,
,  ,
,  и UЧД поступают на вычислитель дальности цели и ее углового положения 18, в котором вычисляют дальность цели по выражению
и UЧД поступают на вычислитель дальности цели и ее углового положения 18, в котором вычисляют дальность цели по выражению 
 где
где 
 а по выражению
а по выражению  где
где 
 , вычисляют ее угловое положение относительно нормали к базе приемных антенн 1 и 2 (фигура 1).
, вычисляют ее угловое положение относительно нормали к базе приемных антенн 1 и 2 (фигура 1).
Вычисленные значения  ,
,  ,
,  ,
,  и
и  поступают на устройство вывода 19, осуществляющего преобразование данных к виду, пригодному для дальнейшей обработки, и их передачу потребителю.
поступают на устройство вывода 19, осуществляющего преобразование данных к виду, пригодному для дальнейшей обработки, и их передачу потребителю.
Согласно прототипа вычислитель 11, может быть выполнен, например, на микропроцессорах типа [http://www.atmel.com/ru/devices/ATMEGA32.aspx]. Новые процедуры (17) - (23), выполняемые вычислителем радиальной скорости цели 12 и вычислителем дальности и углового положения цели 18 могут быть реализованы в аналогичных микропроцессорах. Таким образом, вновь введенные процедуры реализуемы. При изучении других способов в данной области техники совокупность вновь введенных процедур, отличающих заявляемое изобретение от прототипа, выявлена не была.
Для пояснения физической сущности проводимых операций в заявляемом способе, на фигуре 2 приведены диаграммы сигналов. На этих диаграммах буквами «а,…, д» обозначены:
а) сигнал на выходе первого умножителя сигналов 5.1;
б) сигнал на выходе второго умножителя сигналов 5.2;
в) спектры сигналов на выходе первого устройства перемножения сигналов 9.1;
г) амплитудный спектр сигнала с номером nс1 на выходе первого устройства перемножения сигналов 9.1;
д) амплитудный спектр сигнала с номером nс2 на выходе второго устройства перемножения сигналов 9.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2699240C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2016 |
|
RU2635366C1 |
| Способ радиолокационного моноимпульсного измерения дальности и радиальной скорости целей при зондировании сигналом с линейной частотной модуляцией | 2022 |
|
RU2796220C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДЕТАЛЬНЫХ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2018 |
|
RU2710961C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1993 |
|
RU2054693C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ИЗМЕНЕНИЯ ШИРИНЫ ПОЛОСЫ ЗАХВАТА В РАДАРЕ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2019 |
|
RU2709483C1 |

Изобретение относится к радиолокации и может использоваться в радиотехнических системах с непрерывным излучением, в которых приемные антенны значительно удалены от передающих, для определения дальности, радиальной скорости и углового положения целей при их значительном перемещении за период модуляции зондирующего сигнала большой длительности или за интервал облучения цели пачкой когерентных сигналов. Технический результат заключается в повышении точности определения пространственного положения цели, исключении систематической погрешности при измерении дальности цели и устранении неоднозначности определения ее углового положения. Заявленный способ состоит в зондировании цели широкополосным сигналом с линейной частотной модуляцией (ЛЧМ), приеме, усилении и демодуляции отраженных сигналов с двух разнесенных в пространстве антенн. Затем формируют набор опорных сигналов с различной крутизной ЛЧМ, перемножают каждый сигнал из набора с сигналами биений обеих каналов и вычисляют комплексные спектры полученных результатов перемножений. Осуществляют поиск частотных составляющих с максимальной амплитудой в вычисленных комплексных спектрах, характеризующихся соответствующими номерами опорных сигналов nс1 и nс2 и значением их частот ƒRд1 и ƒRд2, определение по значениям nс1 и nс2 опорного сигнала из набора, соответствующих им радиальных скоростей цели  и
и  и доплеровских частот
и доплеровских частот  и
и  , вычисление усредненного значения радиальной скорости цели
, вычисление усредненного значения радиальной скорости цели  . Вычисляют по значениям ƒRд1 и ƒRд2 суммарные дальности до цели R1+R0 и R2+R0. Проводят перенос на опорную частоту демодулированного сигнала одного из приемных каналов, формирование сигнала SФД, амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз сигнала на опорной частоте и демодулированного сигнала другого приемного канала, определение знака и величины UЧД отклонения частоты модуляции сигнала SФД от опорной частоты, по которому и по значениям
. Вычисляют по значениям ƒRд1 и ƒRд2 суммарные дальности до цели R1+R0 и R2+R0. Проводят перенос на опорную частоту демодулированного сигнала одного из приемных каналов, формирование сигнала SФД, амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз сигнала на опорной частоте и демодулированного сигнала другого приемного канала, определение знака и величины UЧД отклонения частоты модуляции сигнала SФД от опорной частоты, по которому и по значениям  ,
,  ,
,  и
и  вычисляют дальность
вычисляют дальность  и угловое
и угловое  положение цели. 3 ил.
положение цели. 3 ил.
Способ определения дальности, скорости и углового положения цели в РЛС с непрерывным излучением, заключающийся в зондировании цели сигналом с линейной частотной модуляцией, приеме первой приемной антенной отраженного сигнала, демодуляции принятого сигнала, формировании набора опорных сигналов с различной крутизной линейной частотной модуляции, диапазон значений которой выбирается пропорционально значениям из априорного диапазона между минимальной и максимальной радиальными скоростями цели, а количество опорных сигналов – заданной точностью определения ее радиальной скорости, перемножении каждого опорного сигнала с демодулированным сигналом, формировании набора спектров результатов перемножения, определении номера спектра nс1 и частоты  соответствующих спектральной составляющей с максимальной амплитудой, вычислении по найденным nс1 и
соответствующих спектральной составляющей с максимальной амплитудой, вычислении по найденным nс1 и  суммарной дальности R1+R0, где R1 – дальность до цели от первой приемной антенны, R0 – расстояние до цели от передающей антенны, и радиальной скорости
суммарной дальности R1+R0, где R1 – дальность до цели от первой приемной антенны, R0 – расстояние до цели от передающей антенны, и радиальной скорости  цели и соответствующей ей доплеровской частоты
цели и соответствующей ей доплеровской частоты  отличающийся тем, что дополнительно аналогично процедурам в первом приемном канале с использованием демодулированного сигнала, принятого второй антенной, разнесенной в пространстве от первой на расстояние 2d, где d – расстояние между фазовыми центрами передающей и первой или второй приемной антенной, находят номер спектра nс2 и частоту
отличающийся тем, что дополнительно аналогично процедурам в первом приемном канале с использованием демодулированного сигнала, принятого второй антенной, разнесенной в пространстве от первой на расстояние 2d, где d – расстояние между фазовыми центрами передающей и первой или второй приемной антенной, находят номер спектра nс2 и частоту  соответствующие спектральной составляющей с максимальной амплитудой сигнала во втором приемном канале, по которым вычисляют суммарную дальность R2+R0, где R2 – дальность до цели от второй приемной антенны, и радиальную скорость VЦ2 цели, и соответствующую ей доплеровскую частоту
соответствующие спектральной составляющей с максимальной амплитудой сигнала во втором приемном канале, по которым вычисляют суммарную дальность R2+R0, где R2 – дальность до цели от второй приемной антенны, и радиальную скорость VЦ2 цели, и соответствующую ей доплеровскую частоту  по результатам вычислений радиальной скорости цели в первом VЦ1 и втором VЦ2 приемных каналах определяют ее среднее значение, формируют сигнал SФД, амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз демодулированного сигнала одного из приемных каналов, перенесенного на опорную частоту, и демодулированного сигнала другого приемного канала, определяют знак и величину UЧД отклонения частоты модуляции сигнала SФД от опорной частоты, по которому и по значениям
по результатам вычислений радиальной скорости цели в первом VЦ1 и втором VЦ2 приемных каналах определяют ее среднее значение, формируют сигнал SФД, амплитуда которого изменяется пропорционально синусу текущей мгновенной разности фаз демодулированного сигнала одного из приемных каналов, перенесенного на опорную частоту, и демодулированного сигнала другого приемного канала, определяют знак и величину UЧД отклонения частоты модуляции сигнала SФД от опорной частоты, по которому и по значениям 
 и
и  вычисляют дальность
вычисляют дальность  и угловое
и угловое  положение цели.
положение цели.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2699240C1 |
| RU 2019144985 A, 30.06.2021 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО НЕСКОЛЬКИХ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКИМИ РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ СО СРЕДНЕЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2002 |
|
RU2221258C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2016 |
|
RU2635366C1 |
| WO 2019211923 A1, 07.11.2019 | |||
| Устройство для перемещения бутылок определенными партиями | 1958 |
|
SU116872A1 |
| US 2019383930 A1, 19.12.2019. | |||

