Изобретение относится к системам радиовидения, обеспечивающим получение изображений объектов сцены, сравнимых по детальности с оптическим.
Получение высокого разрешения по углу в системах радиовидения обеспечивается большим временем наблюдения объектов сцены, при этом за время наблюдения изменения дальности элемента сцены, связанные с движением летательного аппарата (ЛА), могут переходить из одной строки дальности в другую, изменяется и фаза траекторного сигнала, и задержка его огибающей. Неучет изменений дальности и фазы сигнала, отраженного элементом сцены за время наблюдения, приводит к искажению изображения сцены и снижению разрешения.
Закон изменения дальности объект сцены - антенна радиолокационной станции (РЛС) на интервале наблюдения может быть описан степенным рядом. При возможности его ограничения второй степенью, схема обработки траекторного сигнала упрощается, включает линейную компенсацию изменения задержки огибающей сигнала цели и согласованную фильтрацию пачечного сигнала цели, фаза которого равна сумме линейного и квадратичного законов. Для геометрии визирования фиг. 1 значение текущей фазы определяется выражением [1, с. 255]:

где ϕ() - текущая фаза сигнала, отраженного объектом сцены;
λ - длина волны;
V - скорость ЛА;
ТП - период повторения модуляции зондирующего сигнала;
θН - угол между вектором скорости V платформы и вектором, соединяющим фазовый центр синтезируемой антенны с центром облучаемой сцены;
RH - дальность центра синтезируемой апертуры до центра облучаемой сцены;
n - номер периода повторения модуляции зондирующего сигнала на интервале синтеза апертуры, отсчитанной от центра пачки отраженных сигналов, принятых на интервале синтеза апертуры;
 - постоянная начальная фаза.
- постоянная начальная фаза.
При 
где T - время синтеза апертуры;
 - линейное разрешение по азимуту;
- линейное разрешение по азимуту;
δr - разрешение по дальности,
миграцию дальности можно учитывать только в фазе отраженного сигнала цели.
Таким образом, обязательным атрибутом РЛС с синтезом апертуры является компенсация изменения дальности элемент сцены - антенна РЛС на интервале синтеза апертуры (интерполяция) и согласованная фильтрация пачечного сигнала цели.
Известна РЛС бокового обзора, применяющая линейно частотно модулированный (ЛЧМ) сигнал и синтез апертуры, [2], в которой:
получают на участке синтеза апертуры не сжатый по дальности кадр траекторного сигнала A0 (m,n) в координатах дальность - период;
преобразуют его с помощью быстрого преобразования Фурье (БПФ) в частотную область, получают кадр S0(m,j), где j - индекс доплеровской частоты;
выполняют компенсацию миграции огибающей сигналов, отраженных элементами сцены, в частотной области с помощью двумерного фильтра HM(m,j)=HM(m-m0,  , γ), m0 - индекс дальности центра сцены относительно центра синтезируемой апертуры, fj - доплеровская частота, λ - длина волны зондирующего сигнала, V - скорость антенны РЛС в центре синтезируемой апертуры, γ - крутизна девиации ЛЧМ зондирующего сигнала, получают кадр SКМ(m,j)=S0(m,j)HM*(m,j);
, γ), m0 - индекс дальности центра сцены относительно центра синтезируемой апертуры, fj - доплеровская частота, λ - длина волны зондирующего сигнала, V - скорость антенны РЛС в центре синтезируемой апертуры, γ - крутизна девиации ЛЧМ зондирующего сигнала, получают кадр SКМ(m,j)=S0(m,j)HM*(m,j);
выполняют сжатие столбцов кадра SКМ(m,j) по дальности с помощью БПФ, фильтра с амплитудно-частотной характеристикой (АЧХ), соответствующей спектру модуляции зондирующего сигнала, и обратного преобразования Фурье, получают кадр SСЖ(m,j);
компенсируют изменения доплеровской частоты сигналов сцены на интервале синтеза в частотной области путем фильтрации кадра SСЖ(m,j) двумерным фильтром: SРЛИ(m,j)=SСЖ(m,j)Н*КФ(m,j), где H*КФ(m,j) - АЧХ двумерного фильтра, определяемая отличием дальностей элементов сцены относительно центра сцены, крутизной девиации частоты зондирующего сигнала γ и значением af;
преобразуют кадр РЛИ SРЛИ(m,j) из области дальность - доплер в область дальность - кросс дальность с помощью обратного БПФ.
Данный алгоритм один из широко используемых в РЛС с импульсным сигналом и синтезом апертуры. Здесь процедура компенсации миграции огибающих сигналов элементов сцены по дальности выполняется отдельно от процедуры компенсации изменений доплеровской частоты, не учитывает особенности работы РЛС с непрерывным линейно-частотно-модулированным (ЛЧМ) сигналом, что приводит к дополнительным вычислительным и временным затратам при обработке сигнала. Скрытность работы РЛС за счет импульсного режима работы ниже чем в РЛС, использующей непрерывный сигнал.
Аналогов РЛС, использующей непрерывный ЛЧМ сигнал с атрибутами, соответствующими синтезу апертуры, не обнаружено, поэтому в качестве прототипа предлагаемой РЛС взята импульсная РЛС [3, fig. 1, 2], в которой приемопередатчик через передающую антенну излучает импульсный ЛЧМ-сигнал, а принимает отраженный через приемную.
Отраженный сигнал в приемопередатчике переносится на промежуточную частоту и выводится на первый вход синхронного детектора, в дальнейшем тексте называемого демодулятором, выполняющего демодуляцию фазы траекторного сигнала, связанную с ЛЧМ-модуляцией зондирующего сигнала и задержкой сигнала, отраженного центром визируемой сцены.
Квадратурный демодулирующий сигнал приходит на второй и третий входы демодулятора с синтезатора сигнала, в дальнейшем называемом синтезатором сигнала демодуляции, управляемого процессором. Демодулирующий сигнал на интервале между зондирующими импульсами формируется на промежуточной частоте путем сдвига фазы эталонного ЛЧМ-сигнала, выдаваемого с третьего выхода приемопередатчика, на величину, соответствующую данным компенсатора движения о дальности центра сцены относительно антенны РЛС в точках зондирования. Квадратуры демодулированного отраженного сигнала оцифровываются двумя аналого-цифровыми преобразователями (АЦП) и записываются в память.
После записи демодулированного сигнала производится выдача его из памяти в матричный фазовращатель (rotation matrix for deramping). Порядок выдачи определяется адресами, формируемыми процессором и поступающими в память. В матричном фазовращателе по данным процессора производится демодуляция фазы, связанная с ЛЧМ доплеровской частотой сигнала, отраженного центром сцены на участке синтеза апертуры. Сигнал с выхода матричного фазовращателя поступает в сигнальный процессор в виде кадра амплитуд. В сигнальном процессоре выполняются взвешивание кадра двумерным окном, снижающим уровень боковых лепестков по дальности и доплеровской частоте, сжатие сигнала по дальности, многоканальная доплеровская фильтрация с помощью БПФ и вычисление модулей амплитуд сигналов элементов сцены (кадра РЛИ) в координатах дальность - доплеровская частота.
Далее выполняется инвариантное картографирование (преобразование кадра дальность - доплер в кадр прямоугольной системы, ось X которой параллельна вектору скорости ЛА, ось Y ортогональна оси X и находится в горизонтальной плоскости). Инвариантные кадры РЛИ через процессор поступают в процессор РЛИ, где производится накопление последовательностей РЛИ сцены. Накопленное РЛИ выдается потребителю. Накоплением инвариантных РЛИ получают качественный кадр РЛИ сцены при нелинейных траекториях носителя РЛС.
Управление синтезатором сигнала демодуляции и матричным фазовращателем производится следующим образом. На компенсатор движения с ИНС приходят данные о местоположении, скорости и угловом положении платформы РЛС, размещенной на летательном аппарате. По этим данным на участке синтеза апертуры, данным координат центра сцены и фазового центра антенны относительно платформы РЛС компенсатор движения: определяет дальность антенны РЛС в точках измерений ИНС до центра сцены, аппроксимирует кривую дальности рядом Тейлора, по которой находит значения дальности антенны до центра сцены в точках зондирования с периодом ТП.
По данным дальности центра сцены в точках зондирования процессор рассчитывает сигнал демодуляции фазы принятого сигнала на промежуточной частоте, на каждом периоде повторения и вводит его в синтезатор сигнала демодуляции. Этим компенсируется миграция огибающей сигнала, отраженного центром сцены, по дальности. Кроме того, по этим же данным процессор вычисляет сигнал компенсации изменений фазы, траекторного сигнала, управляющего матричным фазовращателем.
Формирование зондирующего сигнала в приемопередатчике производится за счет переноса ЛЧМ-сигнала когерентного гетеродина на несущую частоту с помощью смесителя и стабилизированного гетеродина, последующего усиления по мощности на интервале сигнала импульсной модуляции. Управление когерентным гетеродином приемопередатчика производится процессором через цифроаналоговый преобразователь. Управление импульсным модулятором приемопередатчика так же производится от процессора.
Эталонный ЛЧМ-сигнал промежуточной частоты, формируемый когерентным гетеродином, выводится на синтезатор сигнала демодуляции. Принятый сигнал с помощью второго смесителя и стабильного гетеродина переносится на промежуточную частоту, далее выводится на демодулятор.
Недостатком РЛС является сниженная скрытность работы РЛС за счет импульсного режима, выполнение компенсации миграции отраженного сигнала по дальности и фазе разными блоками (демодулятором и матричным фазовращателем), что увеличивает сложность ее выполнения.
Целью предлагаемого изобретения является повышение скрытности работы РЛС с одновременным упрощением процедуры компенсации миграции сигнала цели по дальности и фазе.
Заявленная цель реализуется за счет работы РЛС в непрерывном режиме, приеме отраженного сигнала с получением сигнала биений отраженного сигнала с зондирующим, демодуляции сигнала биений с помощью эталонного опорного сигнала, компенсирующего миграцию сигналов сцены по дальности и фазе на интервале синтеза апертуры, после которой выполняются сжатие сигналов по дальности и селекция сигналов элементов сцены в равномерной сетке доплеровских частот.
Устройство предлагаемой РЛС содержит последовательно соединенные сигнальный процессор, преобразователь координат, процессор, когерентный приемопередатчик и передающую антенну, первый и второй АЦП, подключенные к первому и второму входам запоминающего устройства соответственно, демодулятор, приемную антенну, подключенную к первому входу когерентного приемопередатчика, когерентный приемопередатчик содержит усилитель мощности, выход которого соединен с третьим выходом когерентного приемопередатчика, отличающееся тем, что первый и второй выходы когерентного приемопередатчика соединены со входами первого и второго АЦП соответственно, выход запоминающего устройства через демодулятор соединен со входом сигнального процессора, второй выход процессора соединен с вторым входом демодулятора, когерентный приемопередатчик излучает непрерывный периодический ЛЧМ сигнал и принимает отраженный с получением сигнала биений отраженного сигнала с зондирующим, в когерентный приемопередатчик введены последовательно соединенные генератор ЛЧМ-сигнала и квадратурный смеситель, первый и второй полосовой фильтр,
первый вход когерентного приемопередатчика соединен с третьим входом квадратурного смесителя, второй выход генератора ЛЧМ соединен с вторым входом квадратурного смесителя, третий выход генератора ЛЧМ соединен с входом усилителя мощности, второй вход когерентного приемопередатчика соединен с входом генератора ЛЧМ, первый и второй выходы квадратурного смесителя через первый и второй полосовые фильтры соединены с первым и вторым выходом когерентного приемопередатчика соответственно,
преобразователь координат преобразует кадр РЛИ из системы координат дальность-доплеровская частота в систему координат дальность - угол;
первый вход процессора используется для приема текущих данных с ИНС о текущем положении платформы РЛС, ее скорости и угловом положении,
четвертый выход процессора соединен со вторым входом преобразователя координат,
третий выход процессора используется для выдачи измеренного РЛИ потребителю,
процессор принимает данные ИНС о координатах платформы РЛС, рассчитывает с учетом данных ИНС дальность антенны РЛС относительно центра облученной сцены во всех точках синтезируемой апертуры, эквидистантно разнесенных по времени периодом выборки сигнала биений отраженного сигнала с зондирующим, рассчитывает и выдает в преобразователь координат модуль скорости антенны в центре синтезируемой апертуры VH и угловое положение ΘН между вектором скорости  и направлением вектора
и направлением вектора  , соединяющим фазовый центр синтезируемой апертуры с центром облучаемой сцены, выдает РЛИ сцены в координатах дальность - угол потребителю, выполняет расчет эталонного сигнала демодуляции сигнала биений с учетом компенсации миграции огибающих отраженных сигналов сцены по дальности.
, соединяющим фазовый центр синтезируемой апертуры с центром облучаемой сцены, выдает РЛИ сцены в координатах дальность - угол потребителю, выполняет расчет эталонного сигнала демодуляции сигнала биений с учетом компенсации миграции огибающих отраженных сигналов сцены по дальности.
Сущность предлагаемой РЛС поясняется дальнейшим описанием и чертежами.
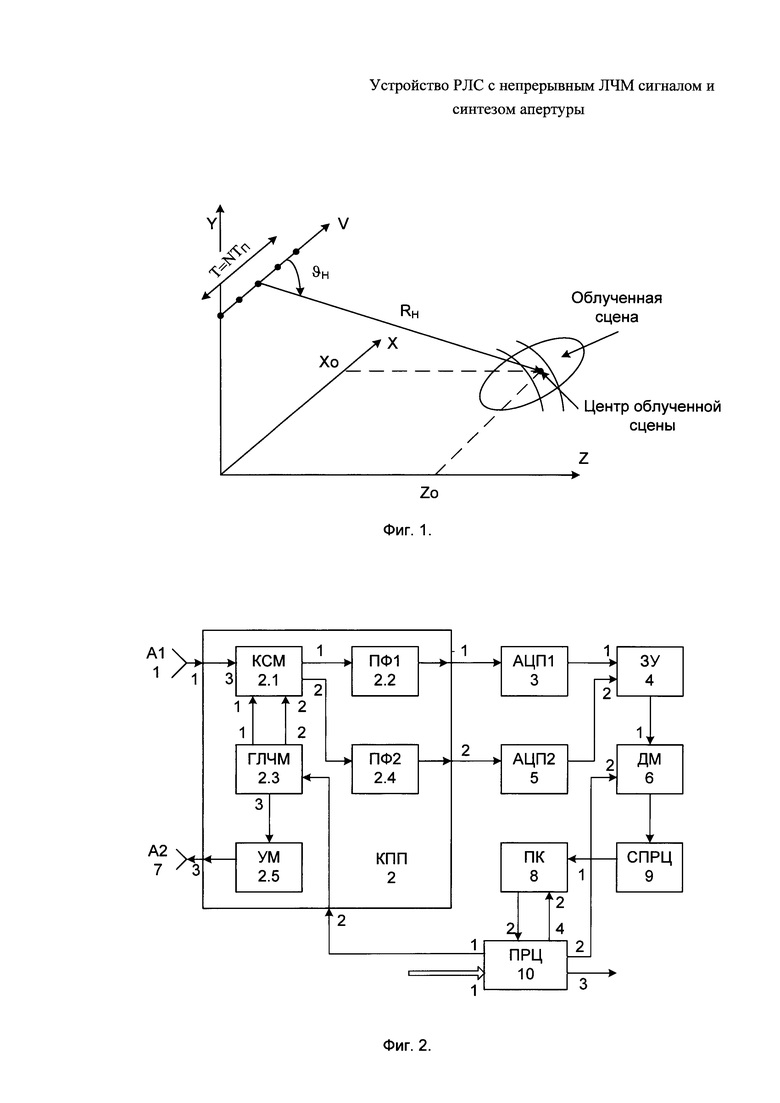
На фиг. 1 представлена геометрия визирования.
На фиг. 2 представлена структура РЛС.
На фиг. 2 приняты следующие обозначения:
1 - приемная антенна (А1);
2 - когерентный приемопередатчик (КПП);
3 - первый аналого-цифровой преобразователь (АЦП1);
4 - запоминающее устройство (ЗУ);
5 - второй аналого-цифровой преобразователь (АЦП2);
6 - демодулятор (ДМ);
7 - передающая антенна (А2);
8 - преобразователь координат (ПК);
9 - сигнальный процессор (СПРЦ);
10 - процессор (ПРЦ).
На фиг. 2 последовательно соединены приемная антенна 1, квадратурный смеситель 2.1, первый полосовой фильтр 2.2, первый АЦП 3, запоминающее устройство 4, демодулятор 6, сигнальный процессор 9, преобразователь координат 8, процессор 10, генератор ЛЧМ 2.3, усилитель мощности 2.5, передающая антенна 7, второй выход квадратурного смесителя через последовательно подключенные второй полосовой фильтр 2.4 и второй АЦП 5 соединен со вторым входом запоминающего устройства 4, первый и второй выходы генератора ЛЧМ 2.3 соединены с одноименными входами квадратурного смесителя 2.1, четвертый выход процессора 10 соединен со вторым входом преобразователя координат 8, второй выход процессора 10 соединен со вторым входом демодулятора 6, первый вход процессора 10 использован для приема текущих данных о координатах платформы РЛС, ее скорости и углового положения, третий выход процессора 10 является выходом РЛС, через который потребителю выдается измеренное РЛИ.
Элементы 3-6 и 8-10 устройства, изображенного на фиг. 2, могут быть выполнены на основе единой бортовой вычислительной машины. Элементы когерентного приемо-передатчика 2 широко используются в радиолокации и не требуют пояснения.
Как уже отмечалось, предлагаемая РЛС работает с непрерывным, периодическим ЛЧМ сигналом, при приеме образуют сигнал биений отраженного сигнала с зондирующим. Определим эталонный сигнал демодуляции сигнала биений, соответствующего отражением зондирующего от элемента сцены в центре кадра РЛИ. Учтем, что:
Фаза зондирующего непрерывного, периодического, модулированного по частоте по закону ЛЧМ-сигнала ϕ(t) описывается выражением:

где f0 - несущая частота зондирующего сигнала;
γ - крутизна девиации частоты зондирующего сигнала;
[]modTП - число по модулю ТП.
Фаза сигнала, отраженного центром РЛИ сцены при равноускоренном движении относительно антенны РЛС:

где 
rH(t) - текущая дальность антенны РЛС относительно центра РЛИ сцены;
ϕ0 - случайный постоянный сдвиг фазы, связанный с природой отражения и задержками сигнала в приемном тракте;
с - скорость света.
Фаза сигнала биений отраженного сигнала с зондирующим без учета ϕ0 в этом случае равна

Данное выражение определяет закон демодуляции сигнала биений в предлагаемой РЛС с периодическим, непрерывным ЛЧМ-сигналом. Особенность его в том, что оно определяет одновременно и компенсацию миграции огибающей сигнала, отраженного центром РЛИ сцены по дальности, и изменений фазы траекторного сигнала, связанных с ЛЧМ доплеровской частотой. При этом компенсацию миграции сигнала по дальности и фазе можно выполнять одновременно одним устройством.
Геометрия визирования сцены при активной работе РЛС на участке синтеза апертуры приведена на фиг. 1. В соответствии со схемой на фиг. 2 РЛС работает следующим образом. До начала активной работы процессор 10 вводит в генератор ЛЧМ 2.3 требуемые параметры непрерывного ЛЧМ сигнала (крутизну девиации несущей частоты γ и период повторения ТП). В активном режиме сигнал генератора ЛЧМ 2.3 после усиления усилителем мощности 2.5 поступает в передающую антенну 7 и излучается в направлении зондируемой сцены. Отраженный сигнал принимается приемной антенной 1, ориентированной аналогично приемной антенне 7. С приемной антенны 1 отраженный сигнал поступает в квадратурный смеситель 2.1, на первый и второй входы которого приходит квадратурный сигнал с генератора ЛЧМ 2.3. Квадратурные сигналы биений с выходов квадратурного смесителя 2.1 последовательно подвергаются полосовой фильтрации в фильтрах 2.2 и 2.4, оцифровке в АЦП 3 и 5 с тактом выборки ТВ и записи в записывающем устройстве 4 в виде комплексных чисел U(k).
Амплитудно-частотная характеристика полосовых фильтров 2.2 и 2.4 селектирует сигнал биений, соответствующий расчетному диапазону дальностей отраженного сигнала, и выполняет роль регулятора амплитуды принятого сигнала по дальности.
Такт выборки сигнала биений ТВ и период повторения ТП выбираются в соответствии с условием

где RMAX - максимальная дальность элементов РЛИ;
с - скорость света;
γ - крутизна девиации частоты модуляции зондирующего сигнала;
K - целое число.
На интервале записи траекторного сигнала процессор 10 через первый вход принимает данные ИНС о координатах платформы РЛС: местоположении (X,Y,Z), составляющих скорости (VX,VY,VZ), угле крена γК, тангажа θT и рысканья ψP. По ним процессор 10 вычисляет дальность центра облучаемой сцены до фазового центра синтезируемой антенны РЛС RH и угла ΘH между вектором скорости антенны  в фазовом центре синтезируемой апертуры и вектором
в фазовом центре синтезируемой апертуры и вектором  , соединяющим фазовый центр синтезируемой апертуры антенны с центром облучаемой сцены. Далее процессор 10 вычисляет эталонный сигнал демодуляции сигнала биений Q(k):
, соединяющим фазовый центр синтезируемой апертуры антенны с центром облучаемой сцены. Далее процессор 10 вычисляет эталонный сигнал демодуляции сигнала биений Q(k):

где 

k - номер выборки сигнала биений,  ;
;
N - число периодов модуляции зондирующего сигнала на интервале синтеза апертуры.
Демодулятор 6 по Q(k) и записанному в запоминающем устройстве 4 сигналу биений U(k) вычисляет демодулированный сигнал UD(k)

Следующий этап обработки - получение кадра РЛИ в координатах дальность-доплеровская частота - выполняется сигнальным процессором 9 в следующей последовательности:
- преобразование демодулированного сигнала биений UD(k) в кадр  , где каждому k соответствуют l и n, удовлетворяющие уравнению k=nK+l,
, где каждому k соответствуют l и n, удовлетворяющие уравнению k=nK+l,  - номер выборки сигнала в пределах периода повторения, n - номер периода повторения модуляции зондирующего сигнала на интервале синтеза апертуры;
- номер выборки сигнала в пределах периода повторения, n - номер периода повторения модуляции зондирующего сигнала на интервале синтеза апертуры;
- выполнение двумерной весовой обработки кадра  по дальности и периоду повторения, обеспечивающей при последующей обработке снижение боковых лепестков сигналов РЛИ по дальности и доплеровской частоте с получением кадра
по дальности и периоду повторения, обеспечивающей при последующей обработке снижение боковых лепестков сигналов РЛИ по дальности и доплеровской частоте с получением кадра  ;
;
- сжатие сигнала по дальности путем выполнения БПФ над всеми столбцами кадра  с получением кадра сжатых по дальности сигналов A(m,n):
с получением кадра сжатых по дальности сигналов A(m,n):

где F1 - оператор прямого преобразования Фурье сигнала, записанного в столбце периода повторения n;
- селекция сигналов элементов сцены по углу многочастотной доплеровской фильтрацией с помощью БПФ, получение кадра комплексных амплитуд сигналов, отраженных элементами сцены S(m,j) в координатах дальность - доплер по выражению:

где Fn - оператор прямого преобразования Фурье сигнала, записанного в строке дальности m;
j - индекс доплеровской спектральной составляющей сигнала fj;
- вычисление модулей амплитуды сигналов кадра S(m,j)

Вычисление кадра РЛИ в координатах дальность - угол B(m,u) производится преобразователем координат 8 на основании связи индекса азимутального угла u с доплером fj

где 
PO [] - оператор округления значения [] до целого;
ΔU - дискрет округления по углу.
Значения скорости VH и угла ΘH, используемые при расчетах по выражениям (15) и (16), приходят на второй вход преобразователя координат 8 с процессора 10. Одиночные кадры РЛИ B(m,u) принимаются процессором 10 и выдаются потребителю через третий выход.
Предложенное устройство РЛС с непрерывным ЛЧМ-сигналом имеет повышенную скрытность за счет использования сигнала с меньшей мощностью, не требует выполнения компенсации миграции сигналов элементов сцены по дальности и фазе разными узлами. Это упрощает процедуру обработки сигнала, сокращает время компенсации.
Проведено моделирование обработки сигнала в РЛС с непрерывным ЛЧМ-сигналом при синтезе апертуры. Результаты подтвердили эффективность предложенного решения при вычислениях РЛИ с высоким разрешением по дальности и углу.
Пользуясь сведениями, представленными в материалах заявки, предлагаемая РЛС с непрерывным ЛЧМ-сигналом и синтезом апертуры может быть изготовлена по существующей известной технологии на базе известных устройств, используемых в радиолокации и вычислительной технике.
ЛИТЕРАТУРА
1. Авиационные системы радиовидения. Монография. / Под ред. Г.С. Кондратенкова. - М.: «Радиотехника», 2015.
2. Патент США 5237329. Method of correcting range migration in image generation in synthetic aperture radar.
3. Патент США 5469167. Synthetic aperture radar for nonlinear trajectories using range relative Doppler processing and invariant mapping.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЁХМЕРНОГО ИЗОБРАЖЕНИЯ В РАДАРЕ ПЕРЕДНЕБОКОВОГО ОБЗОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2019 |
|
RU2709484C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
Изобретение относится к системам радиовидения, обеспечивающим получение изображений объектов сцены, сравнимое по детальности с оптическим, и может быть использовано при синтезе апертуры в радиолокационных станциях (РЛС) с непрерывным линейно-частотно-модулированным сигналом. Достигаемый технический результат - повышение скрытности работы РЛС с одновременным упрощением процедуры компенсации миграции сигнала цели по дальности и фазе. Указанный результат достигается за счет работы РЛС в непрерывном режиме, приеме отраженного сигнала с получением сигнала биений отраженного сигнала с зондирующим, демодуляции сигнала биений с помощью эталонного опорного сигнала, компенсирующего миграцию сигналов сцены по дальности и фазе на интервале синтеза апертуры, после которой выполняются сжатие сигналов по дальности и селекция сигналов элементов сцены в равномерной сетке доплеровских частот. 2 ил.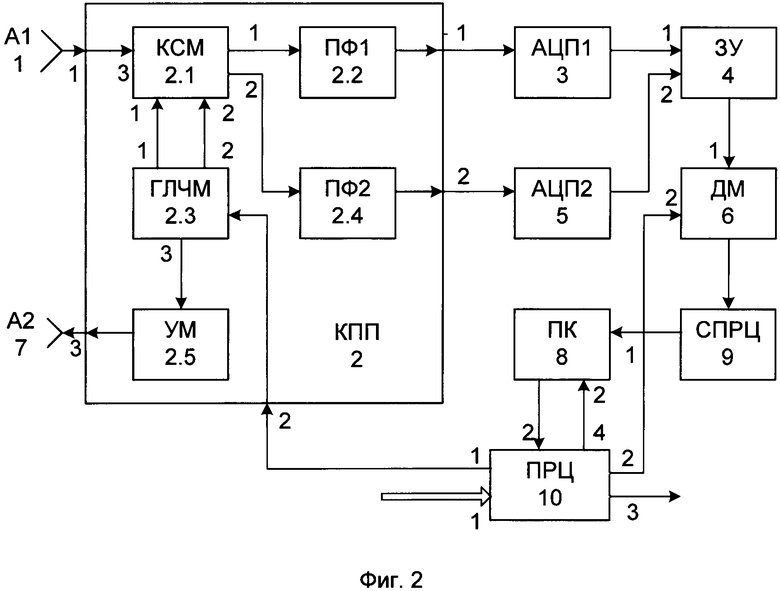
Радиолокационная станция (РЛС) с непрерывным периодическим линейно-частотно-модулированным (ЛЧМ) сигналом, использующая синтез апертуры, содержащая последовательно соединенные сигнальный процессор, преобразователь координат, первый выход процессора, второй вход когерентного приемопередатчика и передающую антенну, первый и второй аналого-цифровой преобразователь (АЦП), подключенные к первому и второму входам запоминающего устройства соответственно, демодулятор, приемную антенну, подключенную к первому входу когерентного приемопередатчика, когерентный приемопередатчик содержит усилитель мощности, выход которого соединен с третьим выходом когерентного приемопередатчика, отличающаяся тем, что первый и второй выходы когерентного приемопередатчика соединены с входами первого и второго АЦП соответственно, выход запоминающего устройства через демодулятор соединен со входом сигнального процессора, второй выход процессора соединен со вторым входом демодулятора, когерентный приемопередатчик излучает непрерывный периодический ЛЧМ-сигнал и принимает отраженный с получением сигнала биений отраженного сигнала с зондирующим, в когерентный приемопередатчик введены последовательно соединенные генератор ЛЧМ-сигнала и квадратурный смеситель, первый и второй полосовой фильтр, первый вход когерентного приемопередатчика соединен с третьим входом квадратурного смесителя, второй выход генератора ЛЧМ соединен со вторым входом квадратурного смесителя, третий выход генератора ЛЧМ соединен со входом усилителя мощности, второй вход когерентного приемопередатчика соединен со входом генератора ЛЧМ, первый и второй выходы квадратурного смесителя через первый и второй полосовые фильтры соединены с первым и вторым выходом когерентного приемопередатчика соответственно, преобразователь координат преобразует кадр радиолокационного изображения (РЛИ) из системы координат дальность-доплеровская частота в систему координат дальность - угол; первый вход процессора используется для приема текущих данных с инерциальной навигационной системы (ИНС) о текущем положении платформы РЛС, ее скорости и угловом положении, четвертый выход процессора соединен со вторым входом преобразователя координат, третий выход процессора используется для выдачи измеренного РЛИ потребителю, процессор принимает данные ИНС о координатах платформы РЛС, рассчитывает с учетом данных ИНС дальность антенны РЛС относительно центра облученной сцены во всех точках синтезируемой апертуры, эквидистантно разнесенных по времени периодом выборки сигнала биений отраженного сигнала с зондирующим, рассчитывает и выдает в преобразователь координат модуль скорости антенны в центре синтезируемой апертуры VH и угловое положение ΘH между вектором скорости  и направлением вектора
и направлением вектора  , соединяющим фазовый центр синтезируемой апертуры с центром облучаемой сцены, выдает РЛИ сцены в координатах дальность - угол потребителю, выполняет расчет эталонного сигнала демодуляции с учетом компенсации миграции огибающих отраженных сигналов сцены по дальности.
, соединяющим фазовый центр синтезируемой апертуры с центром облучаемой сцены, выдает РЛИ сцены в координатах дальность - угол потребителю, выполняет расчет эталонного сигнала демодуляции с учетом компенсации миграции огибающих отраженных сигналов сцены по дальности.
| US 5469167 A, 21.11.1995 | |||
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| JP 2009074918 A, 09.04.2009 | |||
| US 6781541 B1, 24.08.2004 | |||
| JP 2013250122 A, 12.12.1013. | |||

