Область техники
Настоящее изобретение относится к системе операторской платформы, способной к выполнению панорамного поворота и наклонного поворота камеры.
Уровень техники
В системе операторской платформы подвешиваемого к потолку типа, такой как камера наблюдения, при съемке объекта, приближающегося спереди с его отслеживанием с использованием наклонно-поворачивающейся камеры, объект в изображении, полученном после прохождения положения непосредственно под камерой, переворачивается сверху вниз, если выполняется какая-либо обработка изображения. Поэтому, когда угол наклона камеры становится предопределенным заданным углом (например, 90 градусов, при котором камера обращена в направлении непосредственно вниз), во многих случаях предусмотрена функция, которая выполняет обработку переворота на 180 градусов изображения кадра для правильного отображения верха и низа объекта.
Японский выложенный патент № 2003-289466 раскрывает способ генерирования визуального отображения, для которого выполняется обработка переворота для того, чтобы иметь нормальное отношение верх-низ, посредством изменения способа считывания изображения кадра из памяти, которая обеспечена для предварительного сохранения изображения кадра, когда угол наклона камеры относительно потолка равен или больше чем 90 градусов.
Однако в способе, раскрытом в японском выложенном патенте №2003-289466, несмотря на то, что направление поворота наклона камеры не изменяется, поскольку направление перемещения объекта в визуальном отображении внезапно меняется при обработке переворота, пользователь, который наблюдает за объектом, нервничает и ощущает несовместимость в работе.
Кроме того, когда объект идет или подходит к положению непосредственно под камерой, направление перемещения объекта не может быть определено, и в работе по отслеживанию объект может возникнуть путаница.
Сущность изобретения
Настоящее изобретение обеспечивает систему операторской платформы, которая уменьшает неестественность изменения в направлении перемещения объекта в визуальном отображении, чтобы предотвратить путаницу в работе по отслеживанию объекта операции.
Система операторской платформы, в качестве одного аспекта настоящего изобретения, включает в себя камеру, сконфигурированную с возможностью захвата изображения объекта для генерирования изображения кадра, операторскую платформу, сконфигурированную с возможностью поворота камеры вокруг оси панорамирования и оси наклона, и процессор обработки изображений, сконфигурированный с возможностью генерирования визуального отображения, на основе изображения кадра. Когда камера проходит предопределенное угловое положение для поворота вокруг оси наклона, процессор обработки изображений генерирует первое визуальное отображение, соответствующее изображению, сформированному поворотом изображения кадра на угол, больший чем 0 градусов и меньший чем 180 градусов в предопределенном угловом положении, до генерирования второго визуального отображения, соответствующего изображению, сформированному поворотом изображения кадра на 180 градусов.
Система операторской платформы, в качестве другого аспекта настоящего изобретения, включает в себя отображающую линзу, сконфигурированную с возможностью захвата изображения объекта, и операторскую платформу, включающую в себя первый приводной механизм, сконфигурированный с возможностью поворота отображающей линзы вокруг первой оси, перпендикулярной к вертикальному направлению для изменения угла наклона оптической оси отображающей линзы и вертикального направления, и второй приводной механизм, сконфигурированный с возможностью поворота отображающей линзы и первого приводного механизма вокруг второй оси, перпендикулярной к первой оси. Система включает в себя процессор обработки изображений, сконфигурированный с возможностью генерирования первого визуального отображения, соответствующего изображению, сформированному поворотом изображения кадра, полученного до того, как угол наклона достигает первого угла, большего чем 0 градусов и меньшего чем 180 градусов, в соответствии с углом наклона, достигающим первого угла, и генерирования второго визуального отображения, соответствующего изображению, сформированному поворотом изображения кадра, полученного до того, как угол наклона достигает первого угла 180 градусов, в соответствии с углом наклона, достигающим второго угла, отличающегося от первого угла, при изменении угла наклона.
Дополнительные признаки и аспекты настоящего изобретения станут очевидными из следующего описания примерных вариантов воплощений со ссылками на приложенные чертежи.
Краткое описание чертежей
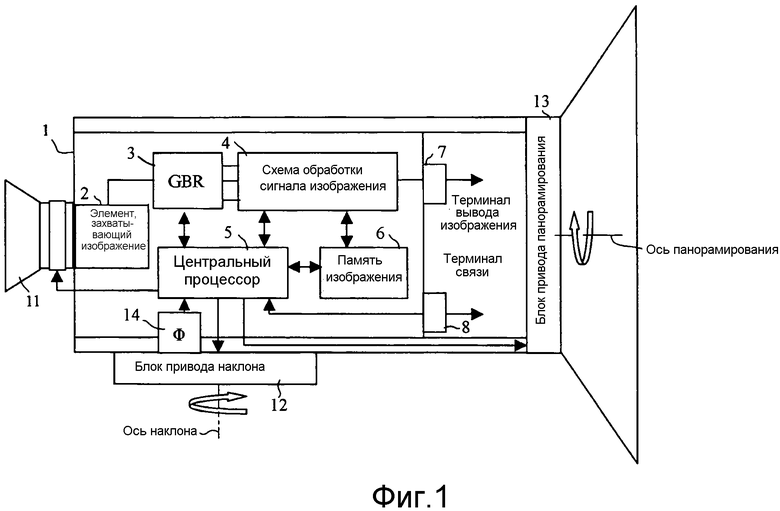
Фиг.1 изображает схему, иллюстрирующую схематическую конфигурацию системы операторской платформы, которая является вариантом воплощения 1 настоящего изобретения.
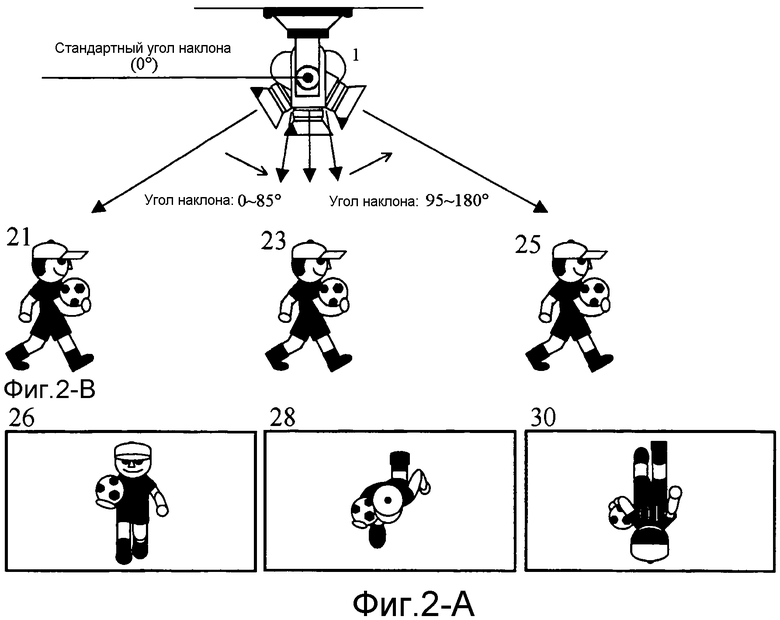
Фиг.2А-2D изображают схемы, иллюстрирующие отношения объекта, системы операторской платформы и контрольный дисплей в варианте воплощения 1.
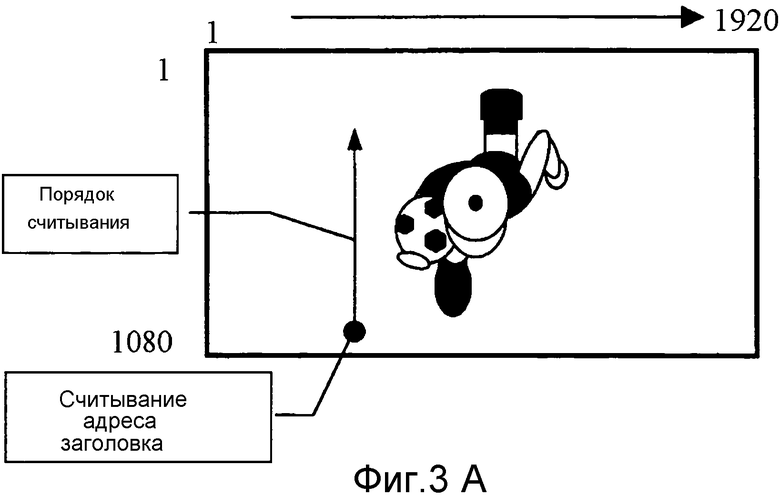
Фиг.3А и 3B изображают схемы описания операции управления памятью изображения в варианте воплощения 1.
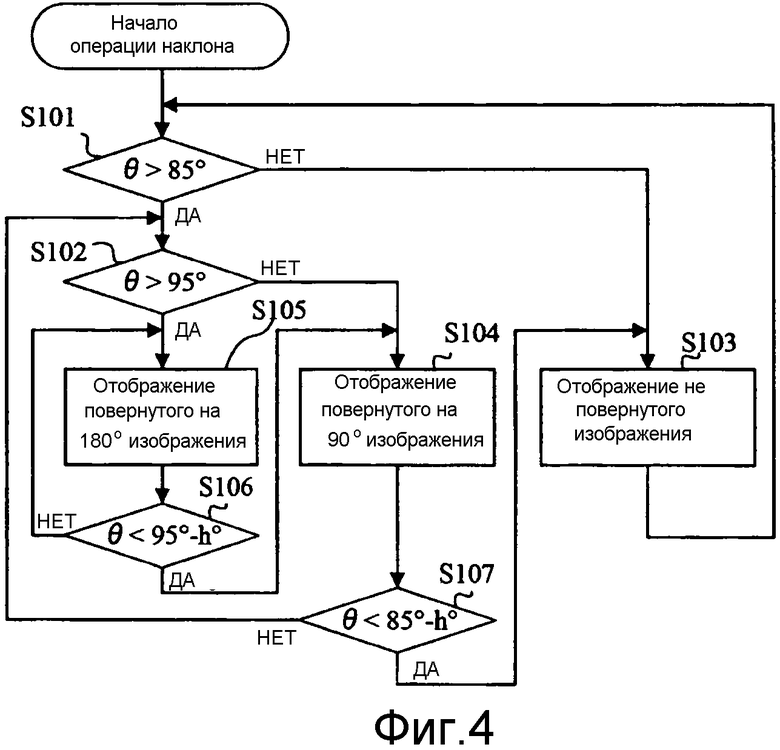
Фиг.4 изображает блок-схему, описывающую перемещение экранного отображения в варианте воплощения 1.
Фиг.5 изображает схему, описывающую отношение системы операторской платформы и угла поворота экранного дисплея в варианте воплощения 1.
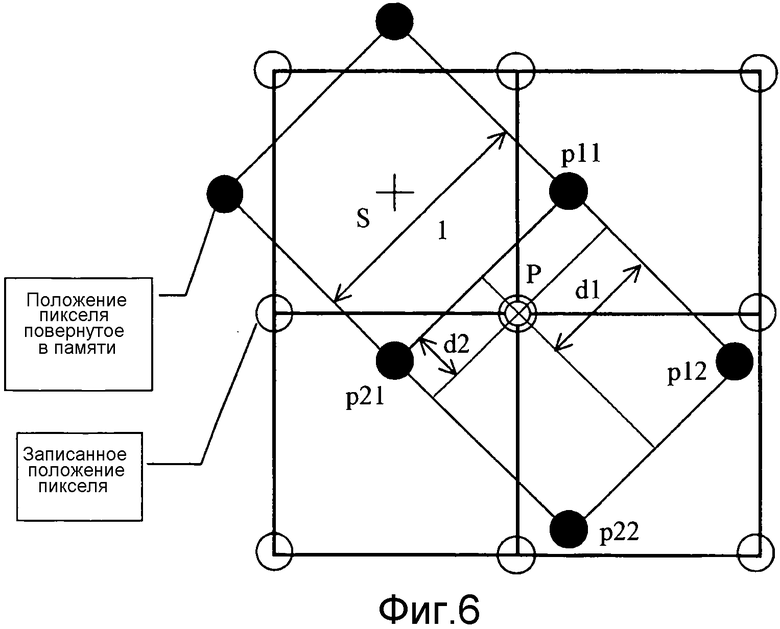
Фиг.6 изображает схему, описывающую способ интерполяции пикселя в варианте воплощения 1.
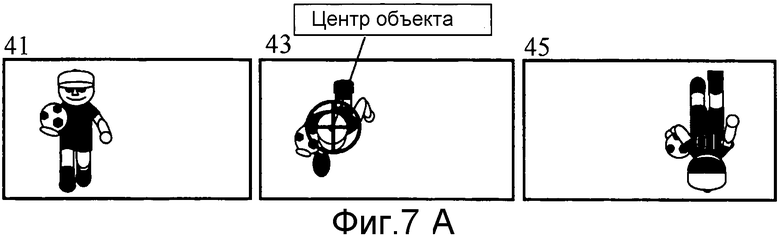
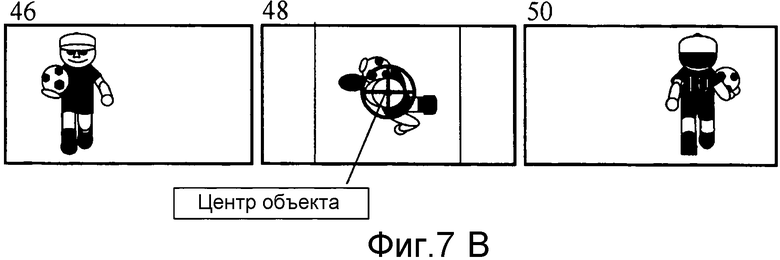
Фиг.7А и 7B изображают схемы, иллюстрирующие экранный дисплей объекта в варианте воплощения 2.
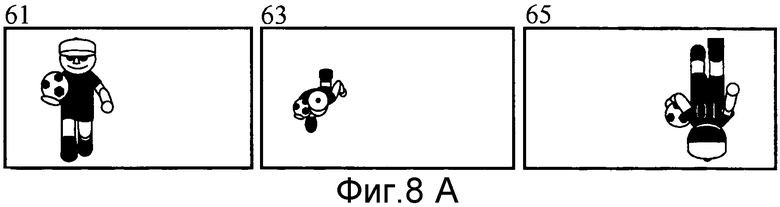
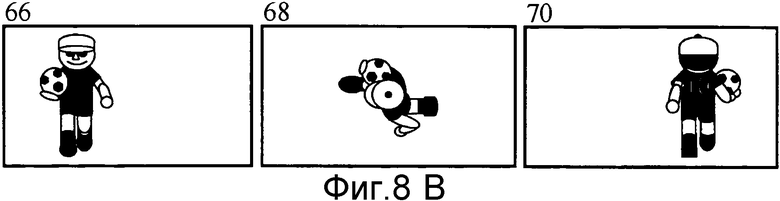
Фиг.8А-8C изображают схемы, иллюстрирующие экранный дисплей объекта в варианте воплощения 3.
Подробное описание вариантов воплощения
Примерные варианты воплощения настоящего изобретения будут описаны ниже со ссылками на приложенные чертежи.
Вариант воплощения 1
Фиг.1 иллюстрирует конфигурацию системы операторской платформы, которая является вариантом воплощения 1 настоящего изобретения. Фиг.2А-2D иллюстрируют отношение между системой операторской платформы и изображением экранного дисплея в зависимости от его угла наклона в варианте воплощения 1.
На фиг.1 ссылочная позиция 1 обозначает систему операторской платформы, конфигурированную камерой, которая захватывает изображение объекта для генерирования изображения кадра, и операторской платформой, посредством которой камера способна к выполнению панорамного поворота вокруг оси панорамирования и наклонного поворота вокруг оси наклона.
Ссылочный символ PA обозначает ось панорамирования (вторая ось), и ссылочный символ TA обозначает ось наклона (первая ось). Ось наклона TA - ось, которая перпендикулярна вертикальному направлению и способна к изменению угла наклона оптической оси отображающей линзы 11 посредством поворота наклона. Ось панорамирования PA - ось, которая перпендикулярна оси наклона TA. В варианте воплощения термин "панорамный поворот" означает поворотное движение камеры для перемещения изображения кадра в поперечном направлении, и термин "наклонный поворот" означает поворотное движение камеры для перемещения изображения кадра в направлении вверх или вниз. Термины "поперечное направление" и " направление вверх или вниз" означают направления в отображении изображения.
Панорамный поворот и наклонный поворот системы 1 операторской платформы управляются посредством пульта дистанционного управления, который не показан, или посредством дистанционного управления через сеть, такую как LAN.
Свет от объекта проходит через отображающую линзу 11 для формирования изображения объекта на воспринимающем изображение элементе 2, таком как датчик CCD или датчик CMOS. Воспринимающий изображение элемент 2 выполняет фотоэлектрическое преобразование изображения объекта для вывода сигнала отображения. Схема 3 разделения GBR разделяет сигнал отображения из воспринимающего изображение элемента 2 в цветовые сигналы G (зеленый), B (голубой) и R (красный).
Схема 4 обработки сигнала изображения преобразует цветовые сигналы G, B и R (аналоговые сигналы) в цифровые сигналы до того, как выполняет различные виды обработки сигнала с цифровыми сигналами для генерирования сигналов отображения (в дальнейшем называемых изображениями кадра). По меньшей мере, одно изображение фрейма, которое составляет изображения кадра, временно записывается в памяти 6 изображения. Схема 5 арифметической обработки (в дальнейшем называемая центральным процессором) выполняет управление генерированием адреса или управление выборкой памяти 6 изображения.
Центральный процессор 5 выполняет запись и чтение сигналов управления изображения фрейма для памяти 6 изображения. Схема 4 обработки сигнала изображения преобразует изображение фрейма, считанное из памяти 6 изображения, в предопределенную форму выходного сигнала до выведения его из терминала 7 вывода изображения к монитору, который не показан. Процессор изображения состоит из схемы 4 обработки сигнала изображения, центрального процессора 5 и памяти 6 изображения.
Таким образом, изображения фрейма последовательно выводятся на монитор для отображения выходного изображения. Выходное изображение является изображением, полученным в результате управления считыванием, описанным ниже для изображения кадра, которое находится в состоянии, когда камера захватила изображение (изображение фрейма записывается в память 6 изображения), и может быть таким же, как изображение кадра, или может быть другим изображением.
Центральный процессор 5 выполняет управления приводным блоком 12 наклона (T) (первый приводной механизм) и приводным блоком 13 панорамирования (P) (второй приводной механизм) или управление масштабированием (Z) и фокусированием (F) отображающей линзы 11. В частности, центральный процессор 5 принимает данные P/T/Z/F управления, отправленные удаленным контроллером, который не показан, и т.п. через терминал 8 связи. Тогда центральный процессор 5 выводит сигнал P/T управления к приводному блоку 13 Р и к приводному блоку 12 Т в соответствии с данными управления и выводит сигнал Z/F управления к отображающей линзе 11. Приводной блок 13 Р и приводная часть 12 Т выполняют панорамный поворот и наклонный поворот операторской платформы, в соответствии с сигналом P/T управления. Отображающая линза 11 выполняет операции масштабирования и фокусирования, в соответствии с сигналом Z/F управления.
Ссылочная позиция 14 обозначает датчик угла наклона, который детектирует угол наклона относительно стандарта установки операторской платформы (поверхность потолка в этом варианте воплощения), для вывода данных об угле, соответствующих углу наклона к центральному процессору 5.
Будет описано подробно управление памятью 6 изображения. Как проиллюстрировано на фиг.3A, количество эффективных пикселей изображения кадра (изображение фрейма), как предполагается, является 1920 в горизонтальном направлении и 1080 в вертикальном направлении, и пиксельные данные G, B и R, как предполагается, составляют 10 бит соответственно. Выборка выполняется в цикле, в котором данные количества фреймов, необходимых за секунду, получаются сверху слева на экране, и пиксельные данные GBR, равные или большие чем один фрейм, записываются в памяти 6 изображения, соответствующей адресу записи (просто 1920x1080* количество фреймов), который сгенерирован относительно количества пикселей. Ширина данных составляет 30 битов. Конфигурация может быть изменена в соответствии с ограничением аппаратных средств, таких как количество эффективных пикселей, сгенерированный адрес, ширина данных и количество центральных процессоров.
Далее будет описано управление памятью 6 изображения, соответствующее повороту системы 1 операторской платформы. Как проиллюстрировано на Фиг.2A, система 1 операторской платформы имеет основной участок приводного блока 13 Р, который прикреплен к потолку, чтобы свешиваться с потолка. В варианте воплощения будет описан случай, когда система 1 операторской платформы отслеживает перемещение объектов 21, 23, и 25 для выполнения наклонного поворота и угол наклона (угол наклона) изменяется от 0 градусов до 180 градусов при прохождении местоположения непосредственно под системой 1 операторской платформы на пути.
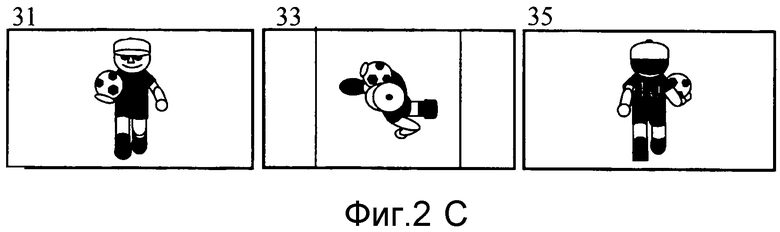
Когда угол наклона находится между 0 градусами и 85 градусами как первый заданный угол (первый угол), считывание из памяти 6 изображения выполняется в порядке записи, то есть выполняется последовательное считывание. Таким образом, выходное изображение 26 объекта отображается на мониторе. В дальнейшем (не повернутое) выходное изображение, которое совпадает с изображением кадра, аналогичным выходному изображению 26, упоминается как не повернутое изображение.
Когда угол наклона находится между 95 градусами, что является вторым заданным углом (второй угол), и 180 градусами, объект отображается вверх ногами, аналогично изображению 30 в последовательном считывании из памяти 6 изображения. Поэтому, в частности, считывание выполняется в направлении от записанного 1920-го пикселя 1080-й линии к первому пикселю первой линии, которое является противоположным порядку записи. В результате получается выходное изображение 35 (второе визуальное отображение), которое соответствует изображению, сформированному поворотом изображения кадра (изображение 30) на 180 градусов вокруг оси панорамирования, то есть изображению, верх и низ которого реверсированы. В дальнейшем выходное изображение, которое соответствует изображению, повернутому на 180 градусов относительно изображения кадра, аналогичное выходному изображению 35, упоминается как повернутое на 180 градусов изображение.
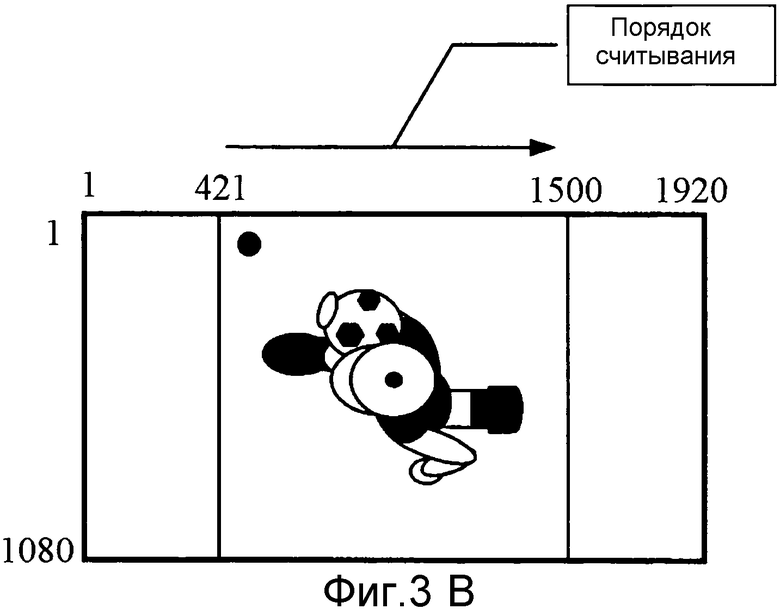
В диапазоне от 85 градусов до 95 градусов (предопределенное угловое положение) угла наклона, который находится в непосредственной близости под системой 1 операторской платформы, выполняется считывание из памяти 6 изображения для получения выходного изображения 33 (первого визуального отображения), которое соответствует изображению, сформированному поворотом изображения кадра (изображения 28) вокруг оси панорамирования на 90 градусов.
В частности, как показано на фиг.3B, вначале считываются данные 421 пикселя 1080-й линии, записанные в памяти 6 изображения, потом данные 421 пикселя 1079-й линии, и в конце считываются данные 1500 пикселя первой линии. В дальнейшем выходное изображение, которое соответствует изображению, которое повернуто на 90 градусов относительно изображения кадра, аналогичное выходному изображению 33, упоминается как повернутое на 90 градусов изображение.
На схеме 4 обработки сигнала изображения позиции отображения с 1-го по 420-й пикселей и с 1501-й по 1920-й пикселей, где не существуют пиксельные данные с 1-й к 1080-ю линии, задаются как фиксированные данные, такие как уровень черного. Затем действительные данные, считанные из памяти 6 изображения, выводятся в соответствующей выходной форме, такой как SDI HD, для вывода их на монитор.
Блок-схема на фиг.4 иллюстрирует выполняемую центральным процессором 5 обработку визуального отображения (управление считыванием из памяти 6 изображения), в соответствии с углом θ детектирования посредством датчика 14 углового наклона. Детектирование угла посредством датчика 14 углового наклона и обработка визуального отображения, в соответствии с углом θ детектирования, выполняются в каждом фрейме.
Когда начинается обработка, центральный процессор 5 определяет, посредством датчика 14 углового наклона, равен ли угол θ детектирования или больше чем 85 градусов, что является первым заданным углом на этапе S101. На этап S102 переходят, когда угол θ детектирования равен или больше чем 85 градусов, то есть в соответствии с возникновением угла θ детектирования в 85 градусов, и с другой стороны переходят на этап S103, когда он меньше чем 85 градусов.
На этапе S102 центральный процессор 5 определяет, посредством датчика 14 углового наклона, равен ли угол θ детектирования или больше чем 95 градусов, что является вторым заданным углом. На этап S105 переходят, когда угол θ детектирования равен или больше чем 95 градусов, то есть в соответствии с возникновением угла θ детектирования в 95 градусов, и с другой стороны переходят на этап S104, когда он меньше чем 95 градусов.
На этапе S103 центральный процессор 5 отображает не повернутое изображение на мониторе. На этапе S104 центральный процессор 5 отображает повернутое на 90 градусов изображение на мониторе. На этапе S105 центральный процессор 5 отображает повернутое на 180 градусов изображение на мониторе.
Хотя выходное изображение, отображенное на мониторе, переключается посредством процессов на этапах от S103 до S105, в порядке переключения изображения, угол запаздывания h-градусов устанавливается как первый заданный угол и второй заданный угол. Угол запаздывания h-градусов является углом, заданным для ровного переключения визуального отображения, который задается как угол, меньший, чем разность между первым заданным углом и вторым заданным углом.
Когда угол θ детектирования изменяется в направлении от 180 градусов к 0 градусов, "Первый заданный угол - h-градусов" и "Второй заданный угол - h-градусов" становятся углами, под которыми выполняется переключение изображения.
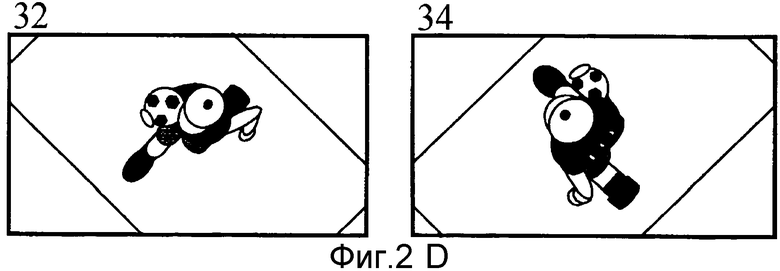
В варианте воплощения раскрывается случай, когда повернутое на 90 градусов изображение отображается между не повернутым изображением и повернутым на 180 градусов изображением. Однако выходное изображение, соответствующее изображению, которое сформировано поворотом изображения кадра вокруг оси панорамирования на угол в диапазоне от 0 градусов до 180 градусов, кроме 90 градусов до и после повернутого на 90 градусов изображения, может также быть отображено между не повернутым изображением и повернутым на 180 градусов изображением. В результате изображение может быть переключено с небольшим ощущением несоответствия.
В частности, как проиллюстрировано на фиг.2D, повернутое на 45 градусов изображение 32, соответствующее изображению, которое сформировано поворотом изображения кадра вокруг оси панорамирования на 45 градусов, отображается между не повернутым изображением 31 и повернутым на 90 градусов изображением 33 с фиг.2C, в соответствии со случаем, когда угол θ детектирования определяется посредством датчика 14 углового наклона как 85 градусов. Кроме того, повернутое на 135 градусов изображение 34, соответствующее изображению, которое сформировано поворотом изображения кадра вокруг оси панорамирования на 135 градусов, отображается между повернутым на 90 градусов изображением 33 и повернутым на 180 градусов изображением 35, в соответствии со случаем, когда угол θ детектирования является 95 градусов.
Фиг.5 иллюстрирует отношение угла наклона (угол θ детектирования) системы 1 операторской платформы в этом случае и угла поворота для изображения кадра, выведенного на монитор в этом случае. На фиг.5 угол запаздывания в h-градусов опущен.
Обычно не повернутое изображение внезапно переключается на повернутое на 180 градусов изображение, передавая положение непосредственно под системой 1 операторской платформы. Однако, в варианте воплощения, в выходном изображении, угол поворота вокруг оси панорамирования постепенно увеличивается в непосредственной близости под системой 1 операторской платформы до того, как отображается повернутое на 180 градусов изображение.
Когда направление изменения угла наклона является направлением от 180 градусов к 0 градусов, выходное изображение, в котором угол поворота вокруг оси панорамирования постепенно уменьшается в непосредственной близости под системой 1 операторской платформы от повернутого на 180 градусов изображения, отображается до того, как отображается не повернутое изображение.
Повернутое на 45 градусов изображение 32 и повернутое на 135 градусов изображение 34, проиллюстрированные на фиг.2D, не могут быть достигнуты только изменением адреса считывания из простой памяти 6 изображения, описанной выше. Однако повернутое на 45 градусов изображение 32 и повернутое на 135 градусов изображение 34 могут быть сформированы посредством вычисления пиксельных данных в положении пиксельного отображения, на основе значений смежных пиксельных данных, полученных при повороте из данных, записанных в памяти изображения, и расстояния от пикселей, для их интерполяции.
Например, как проиллюстрировано на фиг.6, данные изображения, записанные в памяти 6 изображения, поворачиваются в памяти 6 изображения, и данные пикселя P, которые требуются во время вывода из системы 1 операторской платформы, интерполируются для получения повернутого изображения вокруг оси панорамирования, центрированной вокруг пикселя s. Когда значения данных четырех пикселей, смежных с пикселем P после поворота, предполагаются как pll, pl2, p21, и p22, пиксельные данные пикселя P могут быть получены, посредством загрузки этих значений из памяти 6 изображения в центральный процессор 5 и выполнения вычисления с использованием следующего выражения с линейной интерполяцией. Расстояние от пикселей предполагается как 1 (один положительный пиксель).

В выражении dl и d2 являются расстояниями от пикселя P до четырех повернутых пикселей в двух направлениях, ортогональных друг другу.
В варианте воплощения описан не чередующий способ, но основная идея чередующего способа подобна не чередующему способу за исключением того, что вставлена обработка фрейма.
Способ пиксельной интерполяции не ограничен способом интерполяции четырех смежных пикселей, описанным как пример, но может быть также использована интерполяция более высокого порядка с множеством пикселей или данных переднего фрейма.
Кроме того, чтобы сократить продолжительность обработки вычисления, может быть выполнена параллельная обработка, использующая множество памятей изображений.
Кроме того, каждый угол (45 градусов, 90 градусов, 135 градусов, 180 градусов, 85 градусов и 95 градусов) и другие численные значения в варианте воплощения, описанном выше, являются просто примерами, и могут также быть установлены другие углы или численные значения.
В варианте воплощения раскрыт случай, в котором изображение кадра поворачивается вокруг оси панорамирования, но ось панорамирования не должна быть точной осью панорамирования и изображение кадра может поворачиваться вокруг оси, наклоненной на угол в диапазоне от 0 до 50 градусов по отношению к точной оси панорамирования, соответствующей диапазону от 85 до 95 градусов угла наклона, описанного выше. В качестве центральной оси, по которой поворачивается изображение кадра, изображение может поворачиваться вокруг любой оси, если изображение поворачивается без ощущения несоответствия. Тем не менее желательно, чтобы поворотная центральная ось являлась осью, которая проходит через одну точку в изображении кадра и которая расположена между центром изображения и областью, где появляется перемещающийся объект (более предпочтительно между центром изображения и положением центра тяжести перемещающегося объекта, или в положении центра тяжести перемещающегося объекта). Что касается центра поворота, то же самое применимо для вариантов воплощения описанных ниже.
Вариант воплощения 2
Вариант воплощения 1 описывает случай, в котором центр поворота изображения вокруг оси панорамирования предполагается как центр изображения, но для выходных изображений 41, 43, и 45, проиллюстрированных на Фиг.7A, также рассматривается случай, в котором перемещающийся объект не находится в центре изображения.
В этом случае функция детектирования, которая детектирует область, где находится объект, перемещающийся в изображении кадра (предпочтительно положение центра области), передается центральному процессору 5, для возможности получения повернутого изображения, центрированного вокруг области, где находится объект, как проиллюстрировано на фиг.7B.
Функция для детектирования области, где находится перемещающийся объект, например, может быть достигнута следующим образом. Величина перемещения объекта вычисляется центральным процессором 5 на основе разницы между данными изображения текущего фрейма и предыдущего фрейма. Тогда, величина перемещения по сравнению с величиной изменения углового наклона, полученной посредством выхода датчика 14 углового наклона, загруженного в центральный процессор 5 и область, где величина перемещения мала, детектируется в качестве отслеживаемого перемещающегося объекта с возможностью получения области перемещающегося объекта (дополнительно, центра области).
Так же как в варианте воплощения 1, повернутое на 90 градусов изображение 48 (дополнительно, повернутые на 45 градусов и 135 градусов изображения) отображается в непосредственной близости под системой операторской платформы, центрированной вокруг области перемещающегося объекта, полученной ранее. Другими словами, не повернутое изображение 46, и повернутое на 90 градусов изображение 48, и повернутое на 180 градусов изображение 50 последовательно отображаются на мониторе. В результате отображение с ощущением несоответствия, от того что выходное изображение внезапно переключается с не повернутого изображения 46 на повернутое на 180 градусов изображение 50, и от того, что человек в изображении перемещается неожиданно вправо и влево, может быть предотвращено.
Вариант воплощения 3
Варианты воплощений 1 и 2 описывают случай, в котором каждое повернутое изображение было сгенерировано только посредством управления считыванием (обработка изображения) из памяти 6 изображения. Однако более благоприятный эффект может быть достигнут добавлением перемещения отображающей линзы 11.
Например, в варианте воплощении 1, отображающая линза 11 выполняет операцию по оптическому масштабированию от предыдущего состояния масштабирования до состояния масштабирования с широкоугольной стороны посредством инструкции от центрального процессора 5. Таким образом, так как объект подходит близко к центру изображения на мониторе, может ожидаться эффект, подобный тому, что обеспечивает способ поворота сгенерированного изображения, центрированного вокруг области объекта, описанный в варианте воплощении 2. Кроме того, так как окружающий пейзаж также отображается при выполнении операции по оптическому масштабированию с широкоугольной стороны, выполнение обработки поворота вокруг оси панорамирования становится более ясным.
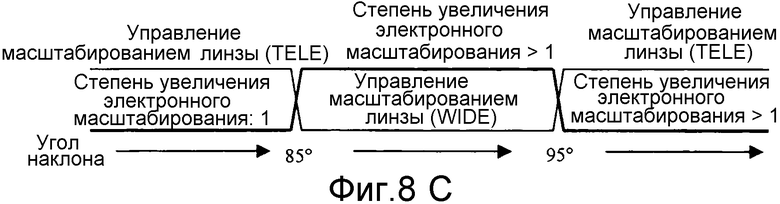
Фиг.8A иллюстрирует выходные изображения 61, 62, и 63, отображаемые на мониторе, когда отображающая линза 11 выполняет только операцию по оптическому масштабированию (в дальнейшем называемую масштабированием линзы) с широкоугольной стороны в непосредственной близости под системой 1 операторской платформы.
Когда масштабирование линзы выполняется с широкоугольной стороны в непосредственной близости под системой 1 операторской платформы, как проиллюстрировано в выходном изображении 63, отображается изображение с широким диапазоном окружения объекта, хотя объект в изображении становится маленьким.
В вариантах воплощениях 1 и 2 фиксированные данные, такие как черный цвет, были отображены в периферийном диапазоне без данных изображения, когда повернутое на 90 градусов изображение было отображено. Однако, как проиллюстрировано на фиг.8B, повернутое на 90 градусов изображение 68, когда это изображение находится также в периферийном диапазоне, может быть отображено с увеличением объекта (части повернутого на 90 градусов изображения) в соответствии с размером объекта в не повернутом изображении 66 или повернутом на 180 градусов изображении 70, посредством операции электронного масштабирования.
В операции электронного масштабирования расстояние между пикселями вычисляется центральным процессором 5 в соответствии со степенью увеличения, так же как для интерполяции пиксельных данных, описанной в варианте воплощения 1, и данные положения, необходимые для выполнения вырезания отображения, центрированного вокруг объекта, генерируются на основе данных 4 смежных пикселей. Повернутое на 90 градусов изображение 68, проиллюстрированное на фиг.8B, является изображением, которое генерируется обработкой увеличения посредством операции электронного масштабирования после части, центрированной вокруг объекта выходного изображения 63 на фиг.8A, которое вырезается для ее поворота на 90 градусов по оси панорамирования.
Фиг.8C иллюстрирует отношение угла наклона, степени увеличения электронного масштабирования и состояния масштабирования линзы в системе операторской платформы. Отношение между состоянием масштабирования линзы и углом области может быть таблично определено для сохранения в центральном процессоре 5 или может управлять усилением масштабирования для того, чтобы получить изображение объекта почти такого же размера, сохраняя размер объекта непосредственно перед операцией масштабирования линзы в памяти.
Кроме того, чтобы выполнить переключение изображения с меньшим ощущением несоответствия, может быть детектирована скорость перемещения объекта для изменения угла наклона для отображения повернутого изображения или количества повернутых изображений, которые отображаются между не повернутым изображением и повернутым на 180 градусов изображением в соответствии со скоростью перемещения. Если скорость перемещения объекта высокая (если она является второй скоростью, которая выше, чем первая скорость), ощущение несоответствия легко не сформируется, даже когда повернутое изображение отображается от малого угла наклона (например, угла наклона, который меньше чем 85 градусов) или количество повернутых изображений сокращено. Кроме того, если скорость перемещения объекта мала (если она является первой скоростью), ощущение несоответствия легко не сформируется, так как возрастает количество повернутых изображений в непосредственной близости под системой операторской платформы.
Функция детектирования скорости перемещения объекта может быть обеспечена центральным процессором 5, который вычисляет скорость перемещения на основе величины изменения за единицу времени выходного сигнала с датчика 14 углового наклона.
Кроме того, система 1 операторской платформы имеет операционную функцию поворота панорамирования, в соответствии с сигналом инструкции панорамирования, введенным дистанционным управлением, но сигнал инструкции панорамирования, введенный во время обработки отображения повернутого изображения в непосредственной близости под системой 1 операторской платформы, может также быть игнорирован. Другими словами, поворот панорамирования может не быть выполнен, даже если сигнал инструкции панорамирования введен. В результате задержка в обработке при генерировании повернутого изображения или увеличение размера схемы для обработки может быть предотвращены.
Кроме того, в каждом из вышеупомянутых вариантах воплощений, хотя описывается случай, когда повернутое изображение сгенерировано посредством центрального процессора 5, памяти 6 изображения, и схемы 4 обработки сигнала изображения, встроенных в операторскую платформу, они могут быть обеспечены вне операторской платформы для генерирования повернутого изображения. Также в этом случае система операторской платформы конфигурируется с возможностью включения в себя центрального процессора, памяти изображения и схемы обработки сигнала изображения, обеспеченных вне операторской платформы.
В то время как настоящее изобретение было описано со ссылками на примерные варианты воплощений, следует понимать, что изобретение не ограничено раскрытыми примерными вариантами воплощений. Объем следующих пунктов формулы изобретения должен иметь самую широкую интерпретацию с тем, чтобы охватить все такие модификации и эквивалентные структуры и функции.
Эта заявка притязает на приоритет японской заявки на патент № 2010-000890, поданной 6 января 2010, которая включена в настоящую заявку во всей полноте посредством ссылки.
Промышленная применимость
Может быть обеспечена система операторской платформы камеры, которая уменьшает неестественность изменения в направлении перемещения объекта в визуальном отображении.
Изобретение относится к системе видеонаблюдения и управления камерой, способной к выполнению панорамного поворота и наклонного поворота камеры. Техническим результатом является уменьшение неестественности изменения в направлении перемещения объекта в визуальном отображении, чтобы снизить ошибки в работе по отслеживанию объекта. Указанный технический результат достигается тем, что cистема операторской платформы имеет камеру, которая захватывает изображение объекта для генерирования изображения кадра, операторские платформы, и которые поворачивают камеру вокруг оси панорамирования и оси наклона, и процессоры обработки изображений, которые генерируют визуальное отображение на основе изображения кадра. Когда камера проходит предопределенное угловое положение для поворота вокруг оси наклона, процессор обработки изображений генерирует первое визуальное отображение, соответствующее изображению, сформированному поворотом изображения кадра на угол, больший, чем 0 градусов и меньший, чем 180 градусов вокруг оси панорамирования в предопределенном угловом положении до генерирования второго визуального отображения, соответствующего изображению, сформированному поворотом изображения кадра на 180 градусов вокруг оси панорамирования. 2 н. и 6 з.п. ф-лы, 15 ил. 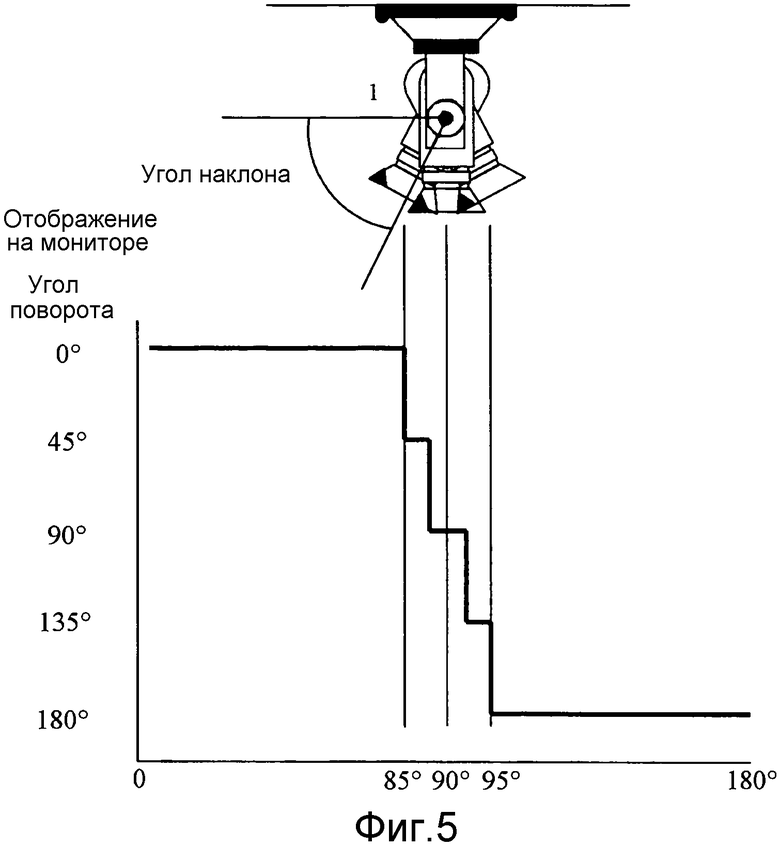
1. Система операторской платформы, содержащая:
камеру, сконфигурированную с возможностью захвата изображения объекта для генерирования изображения кадра;
операторскую платформу, сконфигурированную с возможностью поворота камеры вокруг оси панорамирования и оси наклона; и
процессор обработки изображений, сконфигурированный с возможностью генерирования отображения изображения на основе изображения кадра, при этом
когда камера поворачивается вокруг оси наклона, процессор обработки изображений генерирует первое отображение изображения, соответствующее изображению, сформированному поворотом изображения кадра на угол, больший, чем 0 градусов, и меньший, чем 180 градусов, до генерирования второго отображения изображения, соответствующего изображению, сформированному поворотом изображения кадра на 180 градусов, и
при этом процессор обработки изображений генерирует первое отображение изображения прежде, чем камера пройдет угол, в котором камера обращена в направлении непосредственно вниз вокруг оси наклона.
2. Система операторской платформы по п.1, причем процессор обработки изображений имеет функцию обнаружения, которая обнаруживает движущийся объект в изображении кадра и генерирует первое и второе отображения изображения, соответствующие изображению, сформированному поворотом изображения кадра, который проходит положение, при котором обнаруживается движущийся объект, при обнаружении движущегося объекта.
3. Система операторской платформы по п.1, причем процессор обработки изображений выполняет операцию оптического масштабирования или операцию электронного масштабирования, которая увеличивает часть изображения кадра с широкоугольной стороны камеры для генерирования первого отображения изображения в предопределенном угловом положении.
4. Система операторской платформы по п.1, причем процессор обработки изображений имеет функцию обнаружения, которая обнаруживает скорость движения движущегося объекта в изображении кадра, и сконфигурирован с возможностью увеличения количества изображений, которые генерируются как первое отображение изображения, когда скорость движения является второй скоростью, которая выше, чем первая скорость.
5. Система операторской платформы по п.1, причем операторская платформа имеет операционную функцию, которая поворачивает вокруг оси панорамирования, в соответствии с сигналом инструкции панорамирования, введенным в операторскую платформу, и
причем, когда отображается первое отображение изображения, операторская платформа не поворачивается вокруг оси панорамирования, даже если сигнал инструкции панорамирования введен.
6. Система операторской платформы по п.1, причем и ось панорамирования и ось наклона перпендикулярны оптической оси оптической системы, обеспеченной камерой.
7. Система операторской платформы, содержащая:
изображающую линзу, сконфигурированную с возможностью захвата изображения объекта;
операторскую платформу, включающую в себя первый приводной механизм, сконфигурированный с возможностью поворота изображающей линзы вокруг первой оси перпендикулярной вертикальному направлению для изменения угла наклона оптической оси изображающей линзы и вертикального направления, и второй приводной механизм, сконфигурированный с возможностью поворота изображающей линзы и первого приводного механизма вокруг второй оси перпендикулярной первой оси; и
процессор обработки изображений, сконфигурированный с возможностью генерирования первого отображения изображения, соответствующего изображению, сформированному поворотом изображения кадра, полученного до того как угол наклона достигает первого угла, большего, чем 0 градусов и меньшего, чем 180 градусов, в соответствии с углом наклона, достигающим первого угла, причем первый угол отличается от 0 градусов, и генерирования второго отображения изображения, соответствующего изображению, сформированному поворотом изображения кадра, полученного до того как угол наклона достигает первого угла 180 градусов, в соответствии с углом наклона, достигающим второго угла, отличающегося от первого угла, при изменении угла наклона.
8. Система операторской платформы по п.7, причем и первая ось, и вторая ось перпендикулярны оптической оси оптической системы, обеспеченной камерой.
| US 6977678 B1, 2005-12-20 | |||
| US 2008158355 A, 2008-07-03 | |||
| JP 2004056239 A, 2004-02-19 | |||
| JP 2003289466 A, 2003-10-10 | |||
| JP 2004266876 A, 2004-09-24 | |||
| US 2009128647 A1, 2009-05-21 | |||
| Способ проверки включения трехфазных счетчиков | 1948 |
|
SU83675A1 |

