Перекрестная ссылка на родственные заявки
[0001] Данная заявка подана 4 февраля 2015 г. как международная заявка на патент согласно договору РСТ и испрашивает приоритет по заявке на патент США №14/175803, поданной 7 февраля 2014 г., которая является частичным продолжением заявки на патент США №13/786383, поданной 5 марта 2013 г., в свою очередь являющейся частичным продолжением обычной заявки на патент США №13/412506, поданной 5 марта 2012 г., описания этих заявок полностью включены в данный документ посредством ссылки.
Введение
[0002] При выполнении выстрела на дальнюю дистанцию огнестрельным оружием стрелок должен сначала определить исходные данные для открытия огня, на основании дистанции до цели (дальности), понижения траектории пули вследствие характеристик полета пули и действия силы тяжести (понижения траектории) и боковой составляющей ветра, который дует во время стрельбы (снос ветром).
[0003] Как правило, стрелок имеет таблицу, отпечатанную на боку его оружия, или помнит значения для каждой из поправок, то есть на понижение траектории и снос ветром при различных дальностях и скоростях ветра. Стрелок должен тогда вносить поправку на каждое из значений этих составляющих. Два способа обычно используются для этой цели. По первому следует вручную подстроить барабанчики на оптическом прицеле так, чтобы окулярная сетка направила стрелка к положению цели с учетом поправок. По второму варианту следует использовать то, что специалистами в данной области техники обычно называется "корректировкой прицела". Для этой цели есть много типов оптических прицелов, которые имеют градуированные окулярные сетки. Стрелок помещает цель в различное положение на окулярной сетке на основании ее градуировки.
[0004] Есть многочисленные "оптические решения" для проблемы "автоматического определения исходных данные для открытия огня", приведенные в предыдущих патентах; однако немногие из них и редко выживают на рынке из-за высокой стоимости автоматического перемещения оптических компонентов и трудности поддержания точности при многократных ударных воздействиях от оружия.
Сущность изобретения
[0005] Первая форма осуществления приспособления или устройство визирования цели в соответствии с данным изобретением содержит датчик изображения и линзу для получения телевизионных изображений предметов, в которые нацеливается прицел; процессор обработки изображений; датчик наклона для измерения силы тяжести относительно прицела; компонент дисплея для воспроизведения телевизионных изображений, фиксируемых датчиком изображения и обрабатываемых процессором обработки изображений: линзу окуляра, позволяющую пользователю рассматривать компонент дисплея; датчик давления и температуры для измерения атмосферных условий и подходящее средство для помещения упомянутых компонентов.
[0006] Устройство обеспечивает полностью "твердотельное цифровое" и "оставляющее руки свободными" решение для задачи точного нацеливания оружия с дальней дистанции. Стрелок способен вводить всю необходимую информацию, чтобы произвести выстрел с дальней дистанции во время стрельбы, не отрывая свои руки от оружия, просто наклоняя оружие из стороны в сторону.
[0007] Заранее заданный пороговый угол определяет функцию наклона. С целью объяснения допустим, что он составляет 10 градусов. Если угол наклона оружия меньше 10 градусов в любом направлении, то есть влево или вправо, делается вычисление для установки поправки на снос ветром. Представление величины поправки на снос ветром накладывается, наряду с соответствующим символом перекрестия, чтобы определить точку прицеливания на телевизионном изображении, представляемом стрелку. Если угол наклона больше 10 градусов в обоих направлениях, то численное значение дальности, накладываемое на телевизионное изображение, непрерывно увеличивается или уменьшается в зависимости от направления и величины угла наклона более 10 градусов. Поле зрения, то есть (увеличение) телевизионного изображения, представляемого стрелку, одновременно увеличивается или уменьшается относительно численного значения дальности, если поле зрения находится в пределах поля зрения, определяемого передней линзой и датчиком изображения,
[0008] Дальномерный круг также накладывается на телевизионное изображение. Этот круг представляет заранее заданный размер цели. Круг остается фиксированного размера на компоненте дисплея, если поле зрения больше чем его минимум. Если поле зрения находится на минимуме, размер круга определения дальности постепенно подстраивается до меньшего размера в зависимости от установки дальности. Чтобы найти дистанцию до цели, стрелок регулирует установку дальности, наклоняя оружие больше 10 градусов влево или вправо, пока цель не будет соответствовать кругу определения дальности.
[0009] Как описано выше, устройство обеспечивает долговечный прицел без видимого внешнего средства управления. Все баллистические вычисления, необходимые для стрельбы на дальние дистанции, выполняются автоматически в зависимости от внутренних датчиков и установок, выполняемых посредством наклона оружия; создавая таким образом простой и удобный прицел.
[0010] Другая форма осуществления в соответствии с данным изобретением представляет собой цифровое устройство прицеливания, которое содержит полый корпус, имеющий центральную ось и первый конец, второй конец и сменный модуль цифровой камеры, поддерживаемый первым концом корпуса. Модуль камеры содержит по меньшей мере одну фокусирующую линзу, расположенную на расстоянии по оси от датчика изображения, смонтированного под прямым углом к оптической оси линзы на схемной плате датчика в модуле камеры. Изображение, проецируемое линзой, фокусируется в заранее заданном месте на датчике. Модуль управления/дисплея, имеющий продольную ось, съемно крепится ко второму концу корпуса. Модуль управления/дисплея электрически соединяется с модулем камеры посредством соединителя на схемной плате датчика модуля камеры. Соединение выполняется, когда модуль управления/дисплея монтируется во второй конец корпуса. Модуль управления/дисплея имеет часть управления, включающую схемную плату и компонент дисплея, установленный на ней, и включает часть дисплея, вмещающую узел линзы окуляра, установленный на одной оси с компонентом дисплея.
[0011] Часть управления модуля управления/дисплея предпочтительно имеет источник питания, датчик наклона, соединитель для внешнего компьютера, процессор обработки изображений, запоминающее устройство и пару выключателей, все они соединены печатной схемой на печатной плате, ориентированной аксиально в модуле управления/дисплея. Модуль камеры и модуль управления/дисплея расположены на одной оси в цилиндрическом корпусе. Модуль управления/дисплея сконфигурирован так, чтобы позволить пользователю выбирать между устанавливаемыми заранее заданными параметрами, когда модуль управления/дисплея отделяется от модуля камеры и поворачивается вокруг его продольной оси. Выбор одного или нескольких заранее заданных параметров выполняется приведением в действие одного или обоих из пары выключателей.
[0012] Датчик наклона в модуле управления/дисплея сконфигурирован так, чтобы измерять угол наклона устройства относительно оси корпуса и заставлять процессор обработки изображений создавать подстроенное изображение цели в ответ на измеряемый угол наклона. Процессор обработки изображений сконфигурирован так, чтобы производить изменение в поле зрения изображения на дисплее после получения от датчика наклона измеряемого угла наклона, превышающего пороговый угол. Угол наклона больше ноля и меньше порогового угла заставляет индикатор коррекции на снос ветром в поле зрения изображения на дисплее изменять положение.
[0013] Модуль управления/дисплея сконфигурирован так, чтобы позволять пользователю выбирать между устанавливаемыми программируемыми параметрами, когда модуль управления/дисплея отделяют от модуля камеры, удерживают горизонтально и поворачивают вокруг его продольной оси.
[0014] В одном аспекте технология касается способа визирования цели, который включает: прием начального состояния оптического устройства, причем начальное состояние включает размер дальномерного элемента и дальность, связанную с размером дальномерного элемента; прием баллистической информации; прием изображения от датчика изображения; отображение по меньшей мере части изображения на дисплее; наложение дальномерного элемента на отображаемую часть изображения; прием первых входных данных масштабирования для установки первого значения масштабирования, причем первое значение масштабирования соответствует первому расстоянию от оптического устройства; и определение первого положения пули на основании первого расстояния и баллистической информации. В форме осуществления изобретения способ дополнительно включает отображение первой представляющей интерес области, основанное по меньшей мере частично на первом положении пули и первом значении масштабирования. В другой форме осуществления изобретения способ дополнительно включает отображение первого символа, соответствующего первому положению пули, в еще одной форме осуществления изобретения способ дополнительно включает: прием входных данных максимального масштабирования для установки максимального значения масштабирования, причем максимальное значение масштабирования определяется представляющей интерес областью датчика изображения и отображаемой представляющей интерес областью; отображение максимально увеличенного изображения, связанного с максимальным значением масштабирования; прием вторых входных данных масштабирования для установки второго значения масштабирования, причем второе значение масштабирования соответствует второму расстоянию от оптического устройства; вычисление размера отрегулированного дальномерного элемента; наложение отрегулированного дальномерного элемента на отображаемое максимально увеличенное изображение; определение второго положения пули на основании второго расстояния и баллистической информации; и отображение второй представляющей интерес области, основанное по меньшей мере частично на втором положении пули и втором значении масштабирования. В еще одной форме осуществления изобретения способ дополнительно включает отображение второго символа, соответствующего второму положению пули.
[0015] В другой форме осуществления вышеизложенного аспекта первый символ - это по меньшей мере одно из точки попадания на цели и направляющего символа. В форме осуществления изобретения первая операция определения положения пули основана по меньшей мере частично на входных данных сноса ветром, в другой форме осуществления изобретения первая операция определения положения пули основана по меньшей мере частично на входных данных информации о пуле, входных данных температуры окружающей среды, входных данных наклона, входных данных крена, входных данных скорости на выходе из ствола и входных данных атмосферного давления. В еще одной форме осуществления изобретения датчик изображения выполнен в виде камеры.
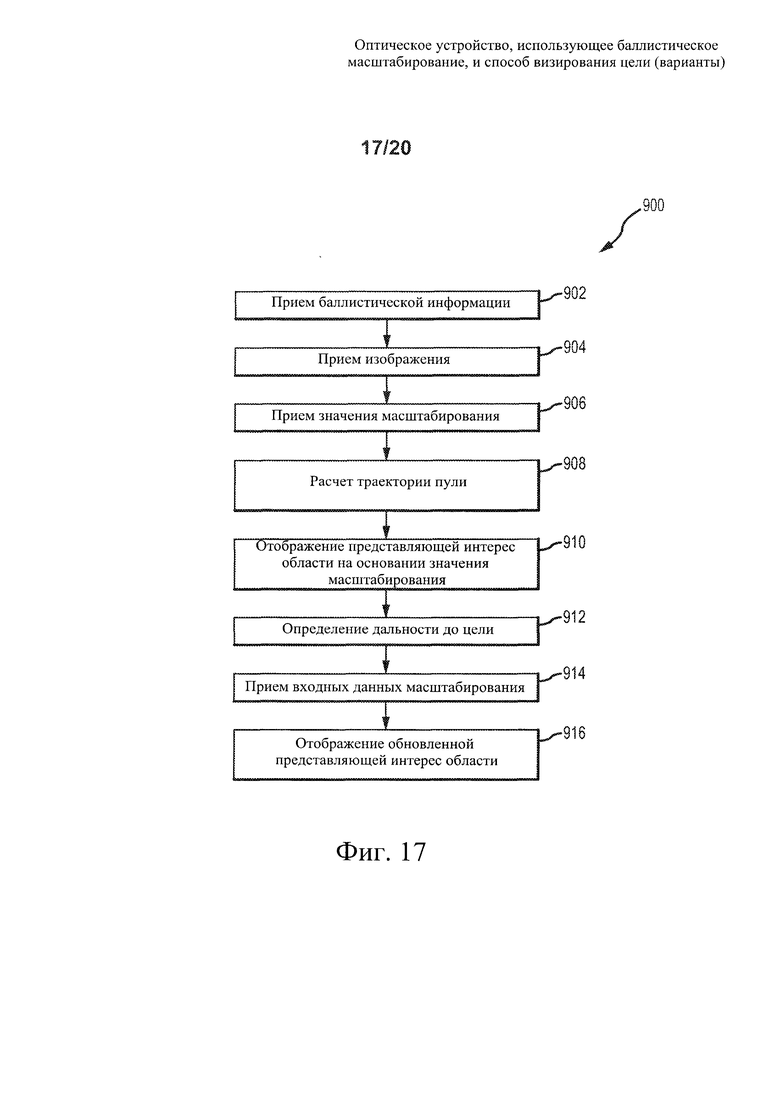
[0016] В другом аспекте технология касается способа визирования цели, который включает: прием баллистической информации; прием изображения от датчика изображения; прием значения масштабирования; вычисление траектории пули, основанное по меньшей мере частично на баллистической информации; и отображение представляющей интерес области на основании значения масштабирования, причем представляющая интерес область соответствует по меньшей мере частично траектории пули. В форме осуществления изобретения способ далее включает определение дальности до цели. В другой форме осуществления изобретения операция определения включает: отображение по меньшей мере части изображения на дисплее и наложение дальномерного элемента на часть изображения. В еще одной форме осуществления изобретения способ дополнительно включает: прием входных данных масштабирования, причем входные данные масштабирования имеют обновленное значение масштабирования; и отображение обновленной представляющей интерес области на основании обновленного значения масштабирования.
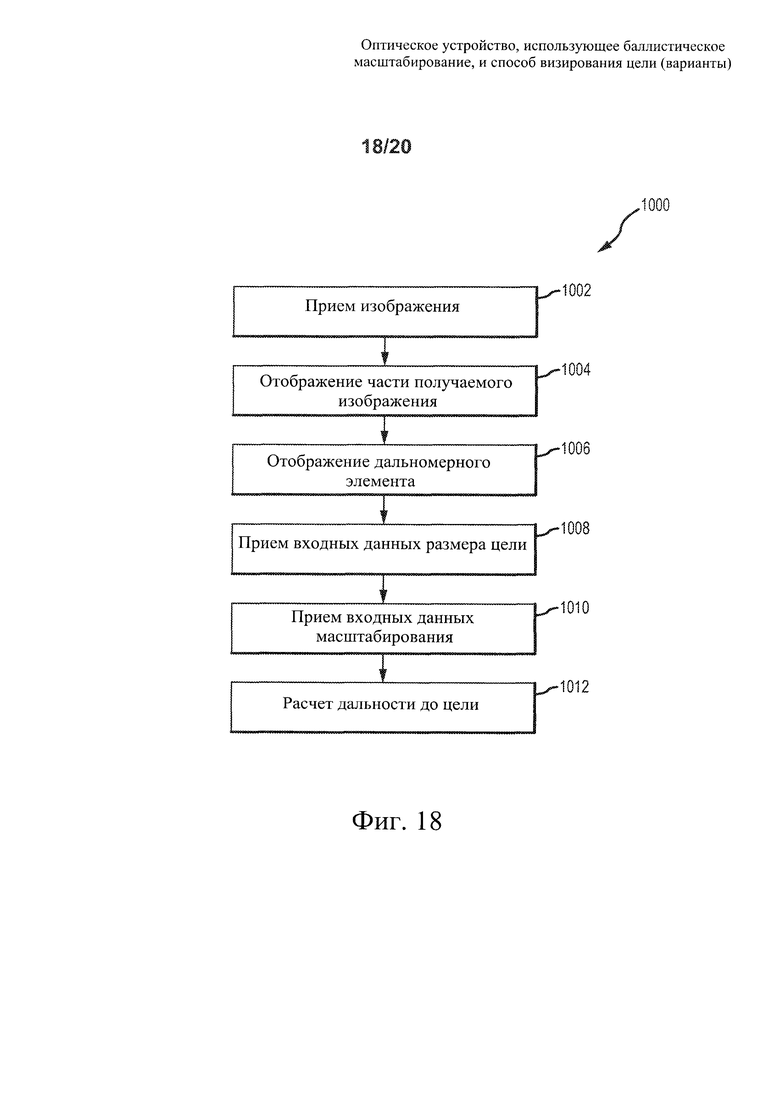
[0017] В еще одном аспекте технология касается способа визирования цели, включающего: прием изображения от датчика изображения; отображение по меньшей мере части принимаемого изображения, причем отображаемая часть имеет отображаемое поле зрения; отображение дальномерного элемента с фиксированным размером в зависимости от отображаемого поля зрения; прием входных данных размера цели; прием входных данных масштабирования для установки значения масштабирования; вычисление дальности до цели, основанное по меньшей мере частично на входных данных размера цели и значении масштабирования. В форме осуществления изобретения входные данные размера цели имеют входные данные размера цели по умолчанию. В другой форме осуществления изобретения прием входных данных размера цели включает прием входных данных размера цели из запоминающего устройства. В еще одной форме осуществления изобретения входные данные размера цели выбираются из множества заранее заданных размеров цели.
[0018] В еще одном аспекте технология касается устройства для визирования цели, которое содержит: корпус; дисплей; датчик изображения и контроллер, сконфигурированный для селективного управления устройством в режиме масштабирования по умолчанию и в режиме баллистического масштабирования, причем в режиме масштабирования по умолчанию увеличение в уровне масштабирования изменяет поле зрения по оптическому пути от устройства до цели, а в режиме баллистического масштабирования увеличение в уровне масштабирования изменяет поле зрения по баллистической траектории от устройства. В форме осуществления изобретения в режиме масштабирования по умолчанию символ, связанный с точкой попадания пули, отображается на дисплее, причем положение символа на дисплее изменяется на основании уровня масштабирования.
Краткое описание чертежей
[0019] Другие особенности и преимущества данной технологии, а так же сама технология, могут быть более полно поняты из следующего описания различных форм его осуществления после его прочтения вместе с прилагаемыми чертежами, на которых:
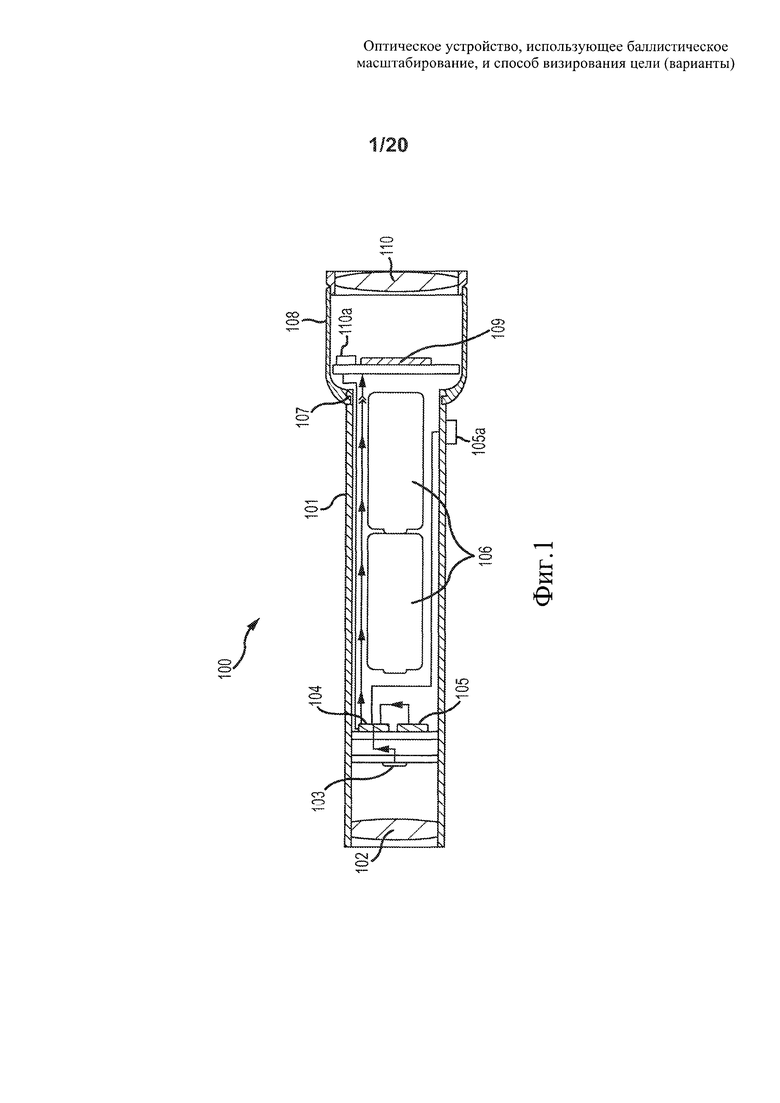
[0020] Фиг. 1 - частный схематический поперечный разрез одной формы осуществления цифрового прицела в соответствии с данным изобретением.
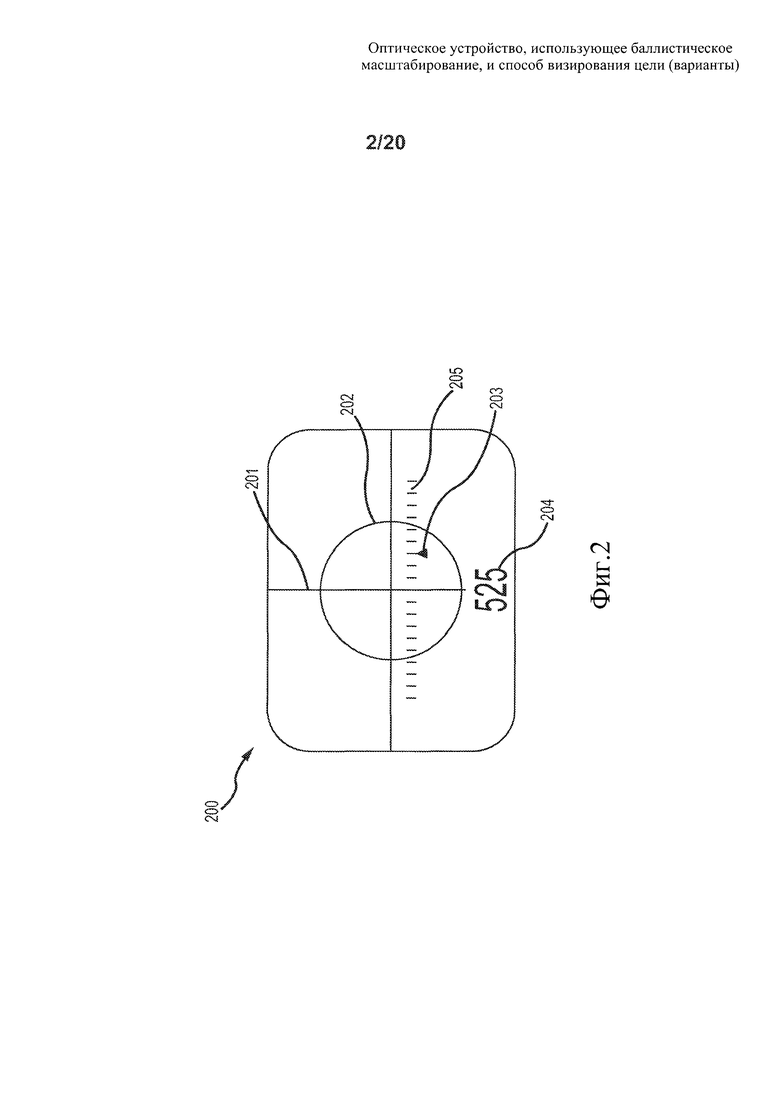
[0021] Фиг. 2 иллюстрирует форму осуществления наложения изображения в цифровом прицеле, показанном на фиг. 1.
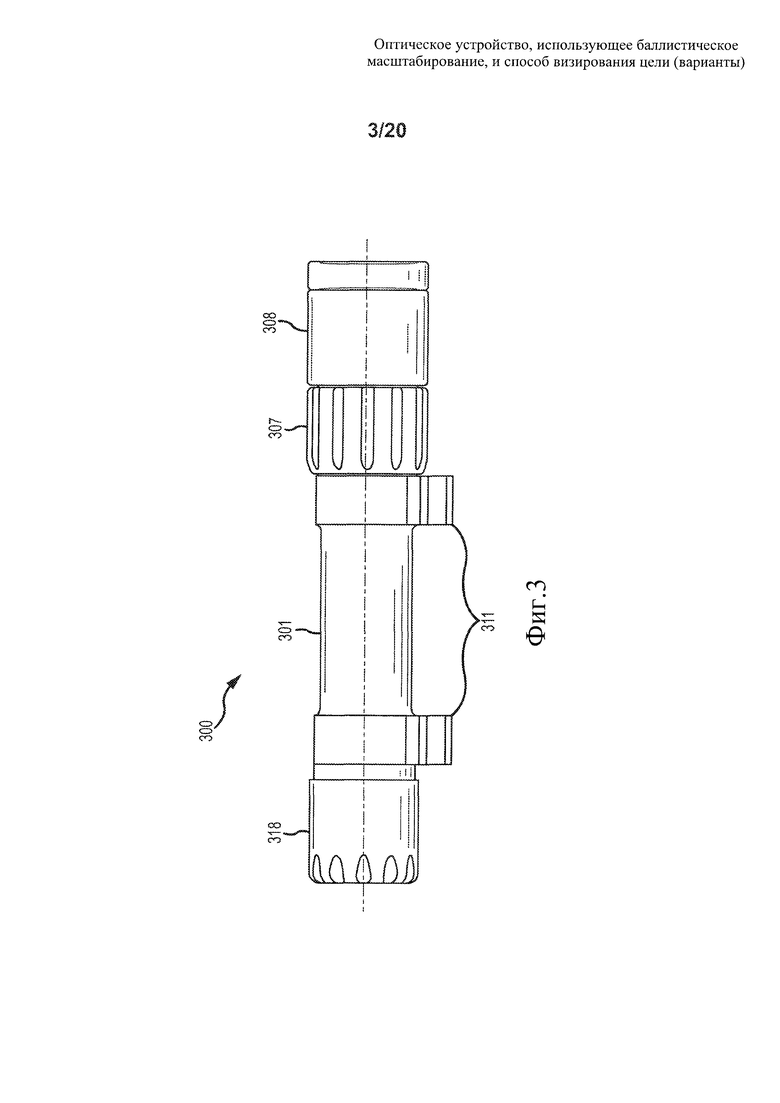
[0022] Фиг. 3 - вид сбоку другой формы осуществления цифрового прицела в соответствии с данным изобретением.
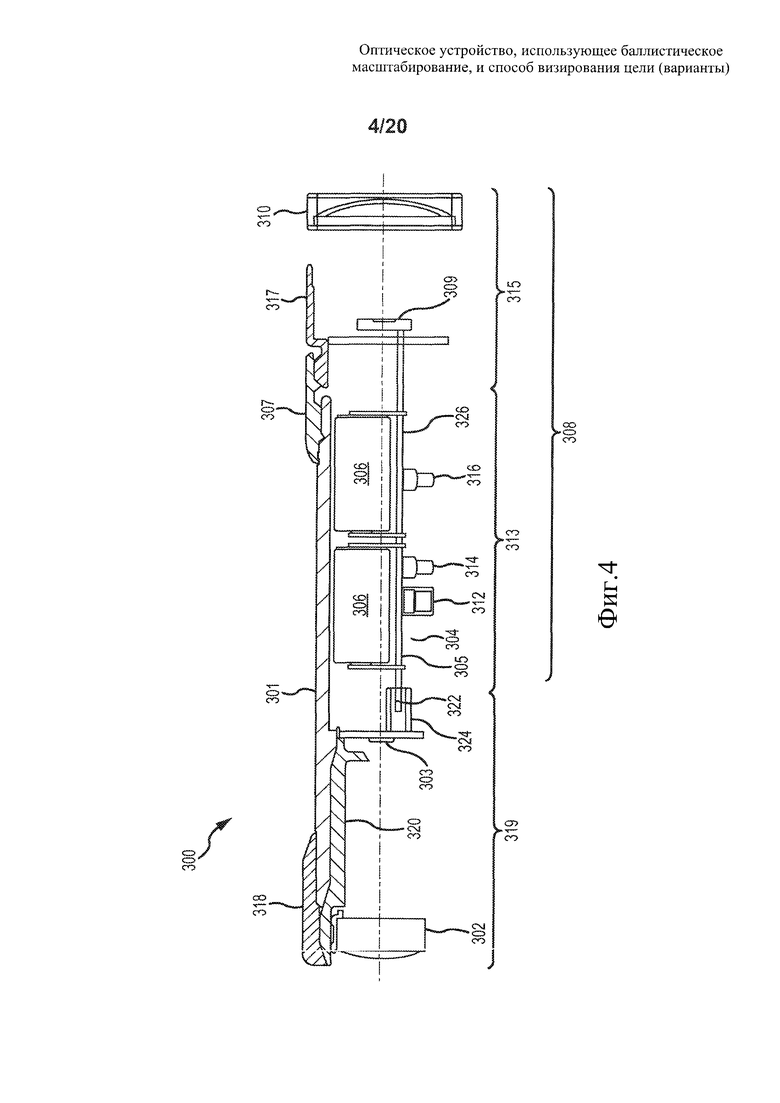
[0023] Фиг. 4 - частичный схематический поперечный разрез цифрового прицела на цель, показанного на фиг. 3.
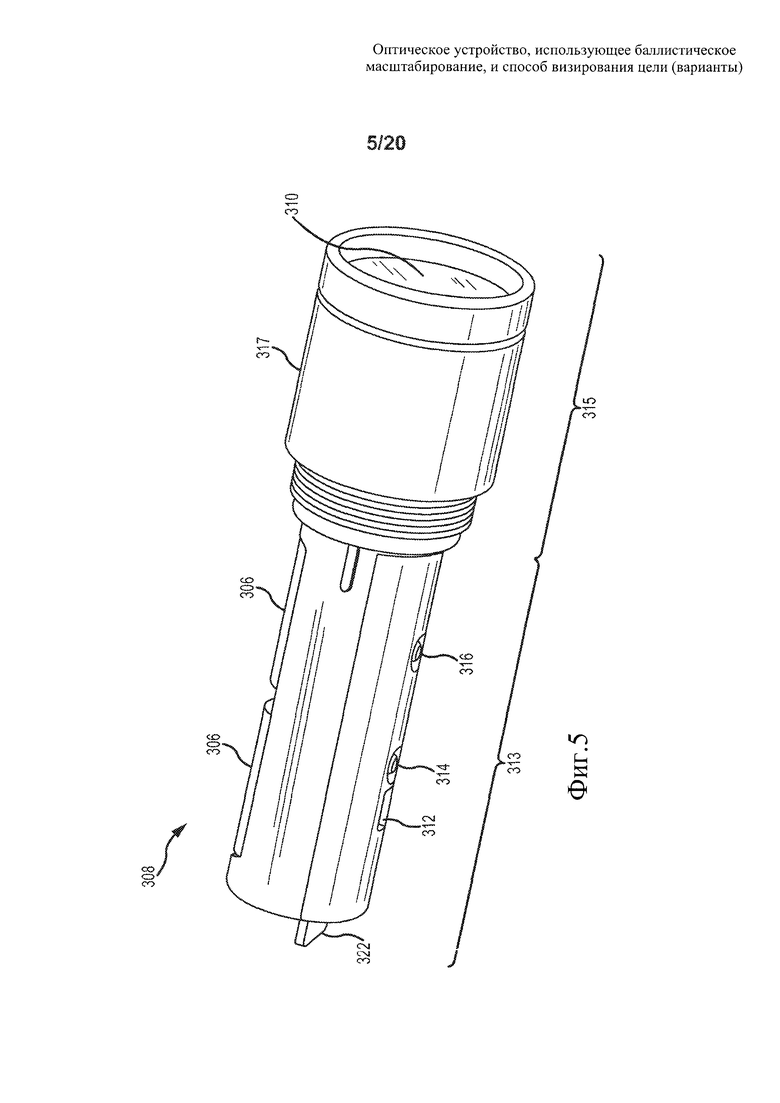
[0024] Фиг. 5 - отдельное перспективное изображение модуля управления/дисплея цифрового прицела, показанного на фиг. 3.
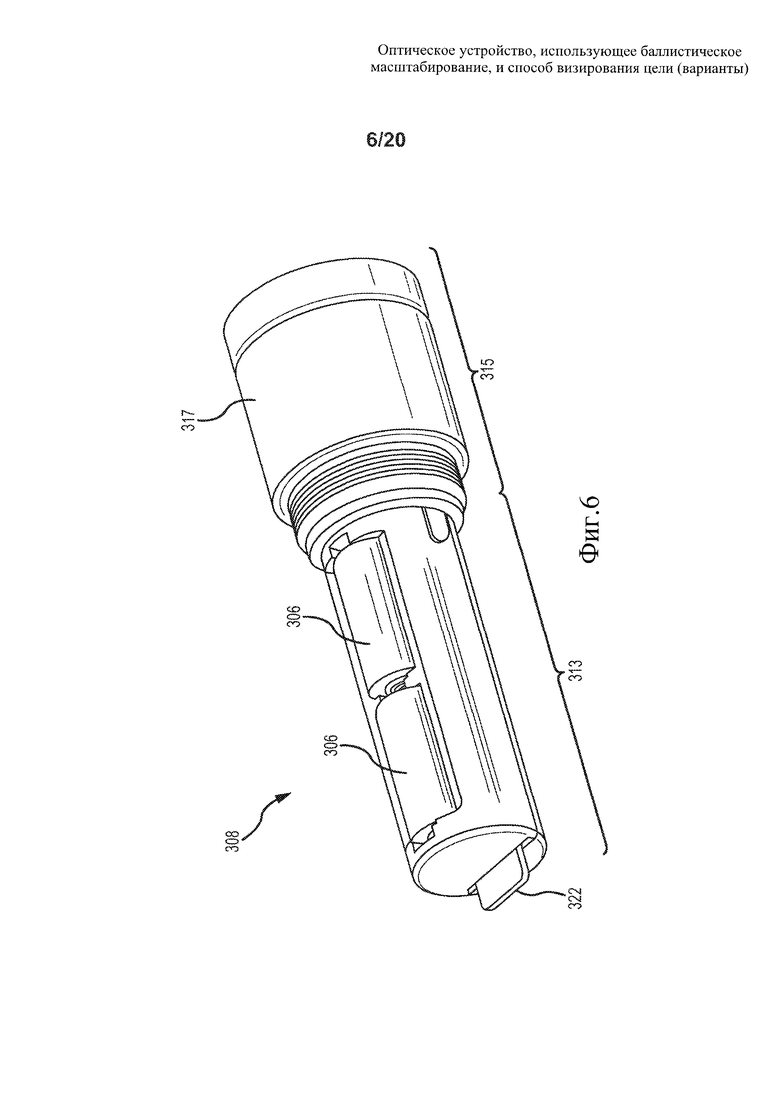
[0025] Фиг. 6 - другое перспективное изображение модуля управления/дисплея, показанного на фиг. 5.
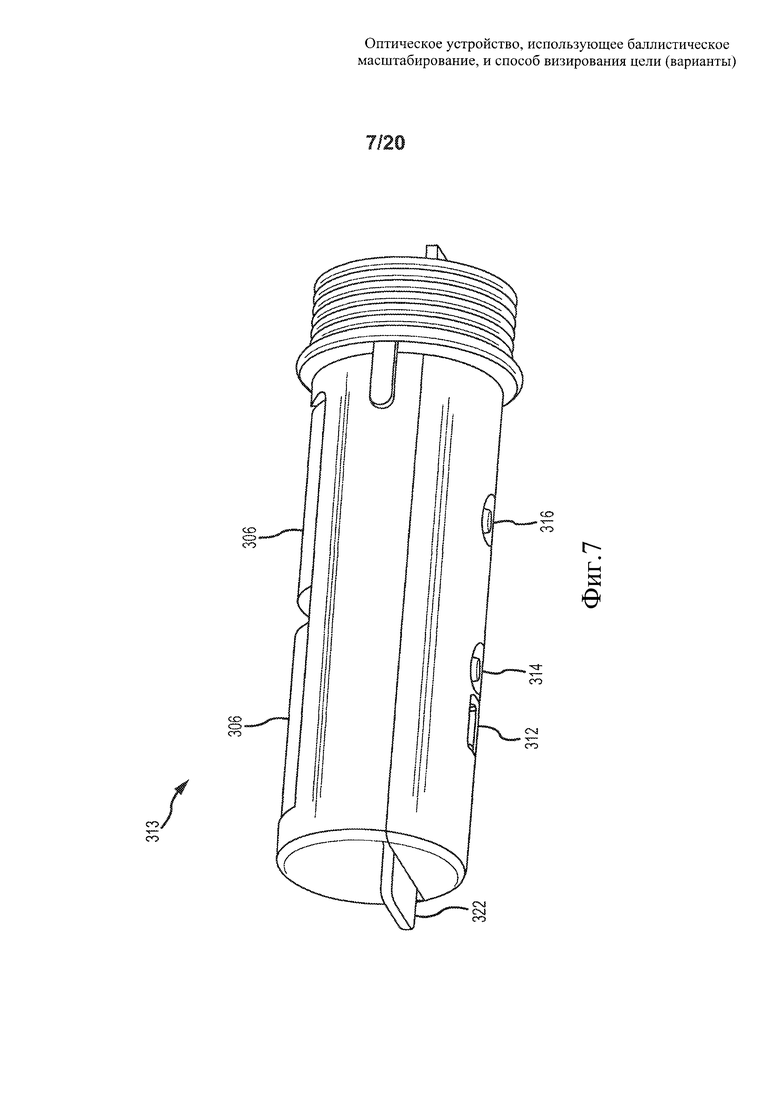
[0026] фиг. 7 - отдельное перспективное изображение части управления модуля управления/дисплея, показанного на фиг. 6.
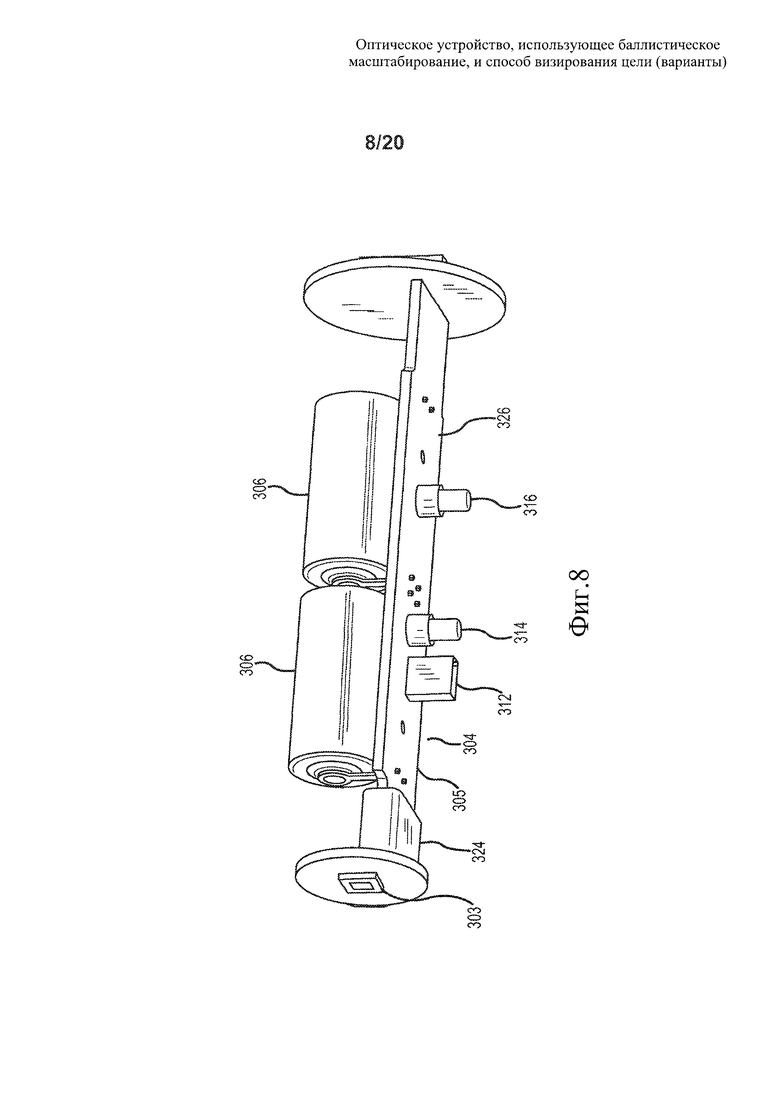
[0027] Фиг. 8 - перспективное изображение управляющей части модуля управления/дисплея фиг. 6, показывающее плату схемы датчика, соединенную с частью управления.
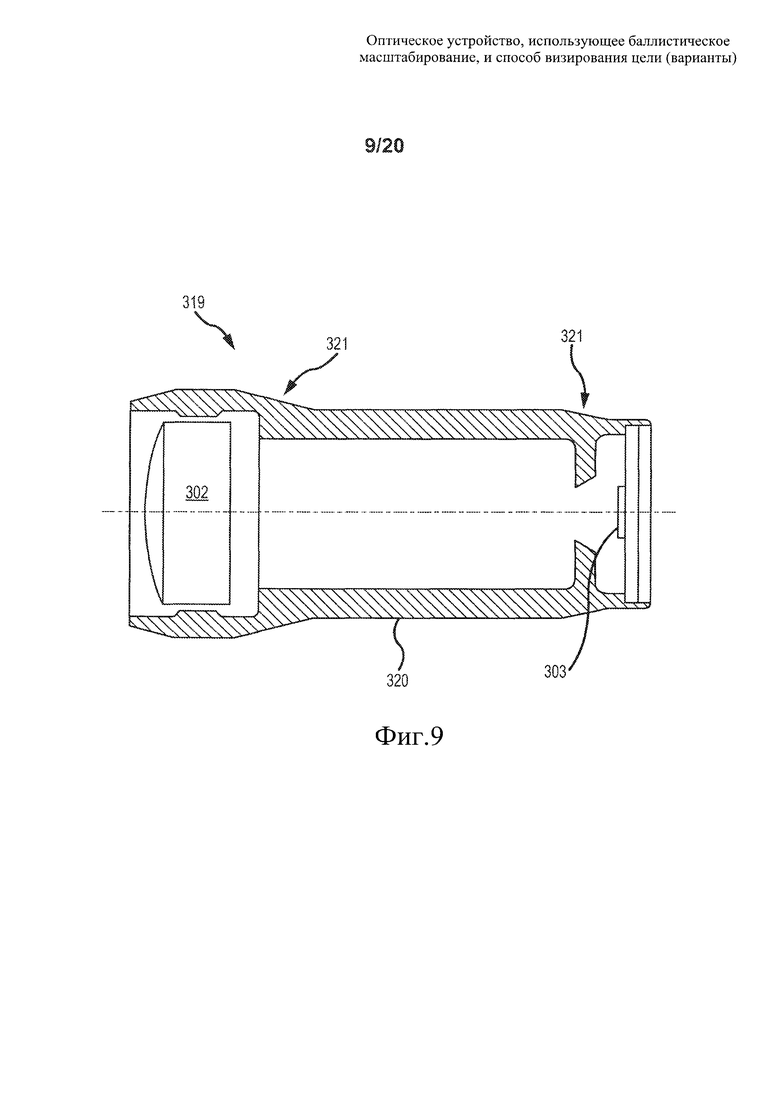
[0028] Фиг. 9 отдельный схематический поперечный разрез сменного модуля камеры в форме осуществления цифрового прицела, показанного на фиг. 3.
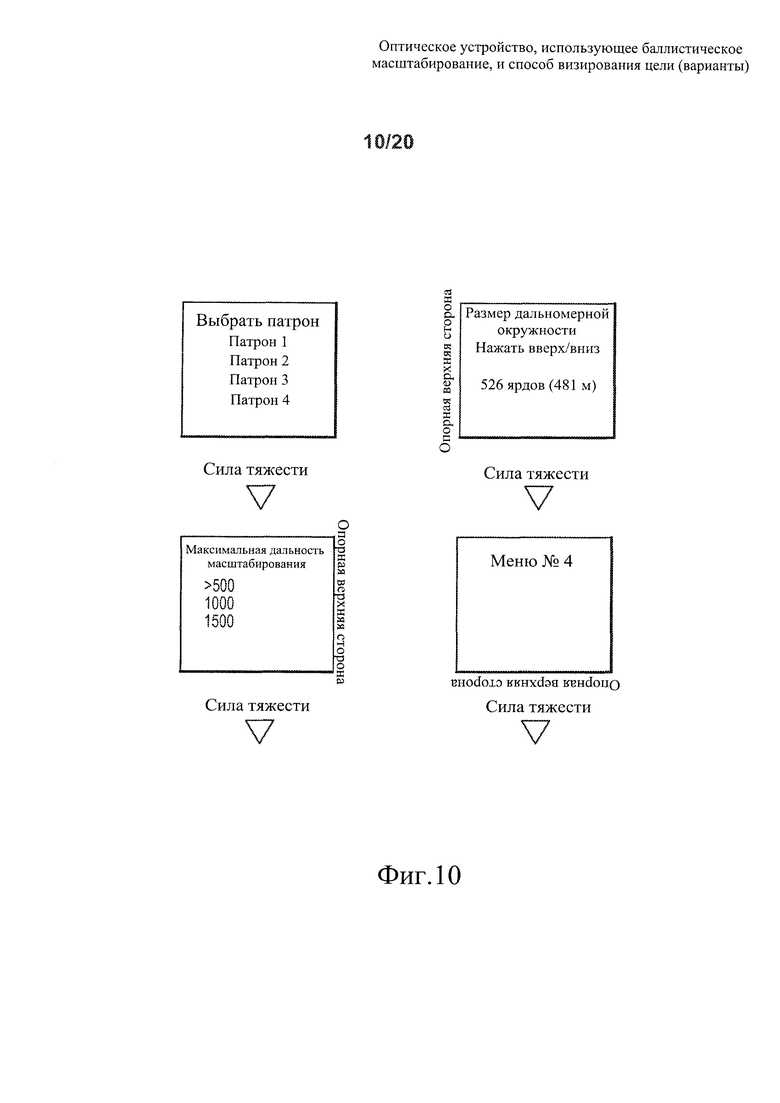
[0029] Фиг. 10 иллюстрирует четыре типичных изображения на дисплее, предоставляемых модулем управления/дисплея цифрового прицела, показанного на фиг. 3.
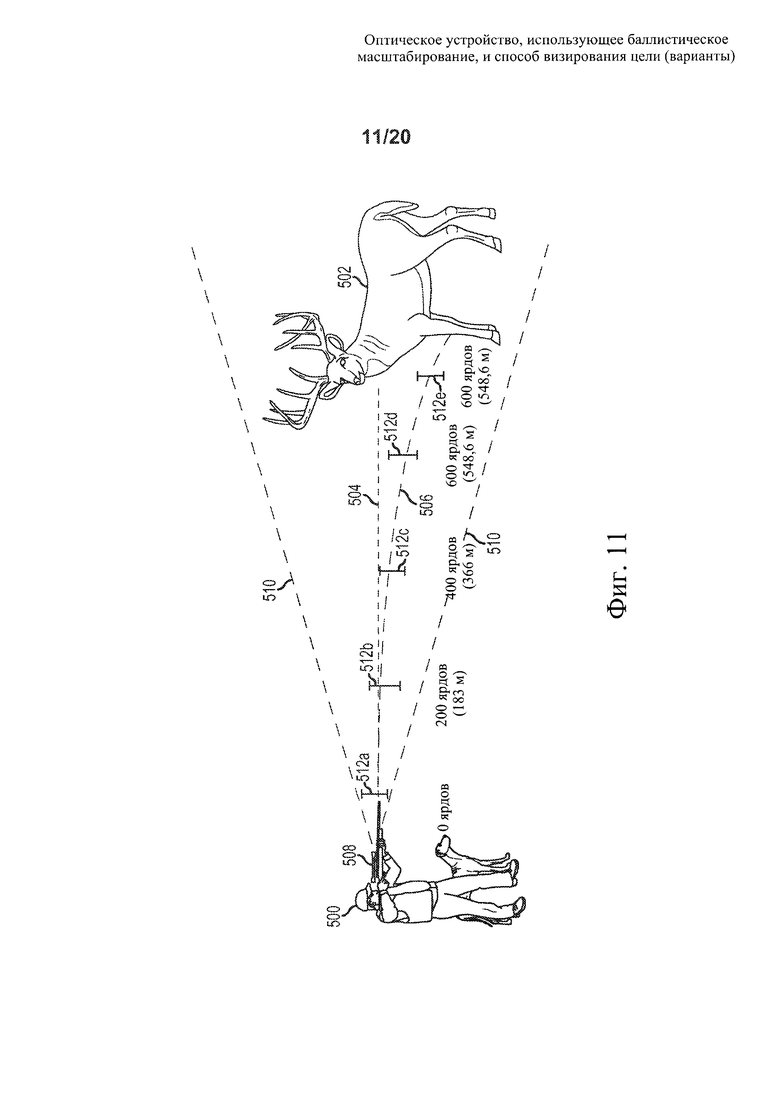
[0038] Фиг. 11 - упрощенное представление влияния силы тяжести на полет пули.
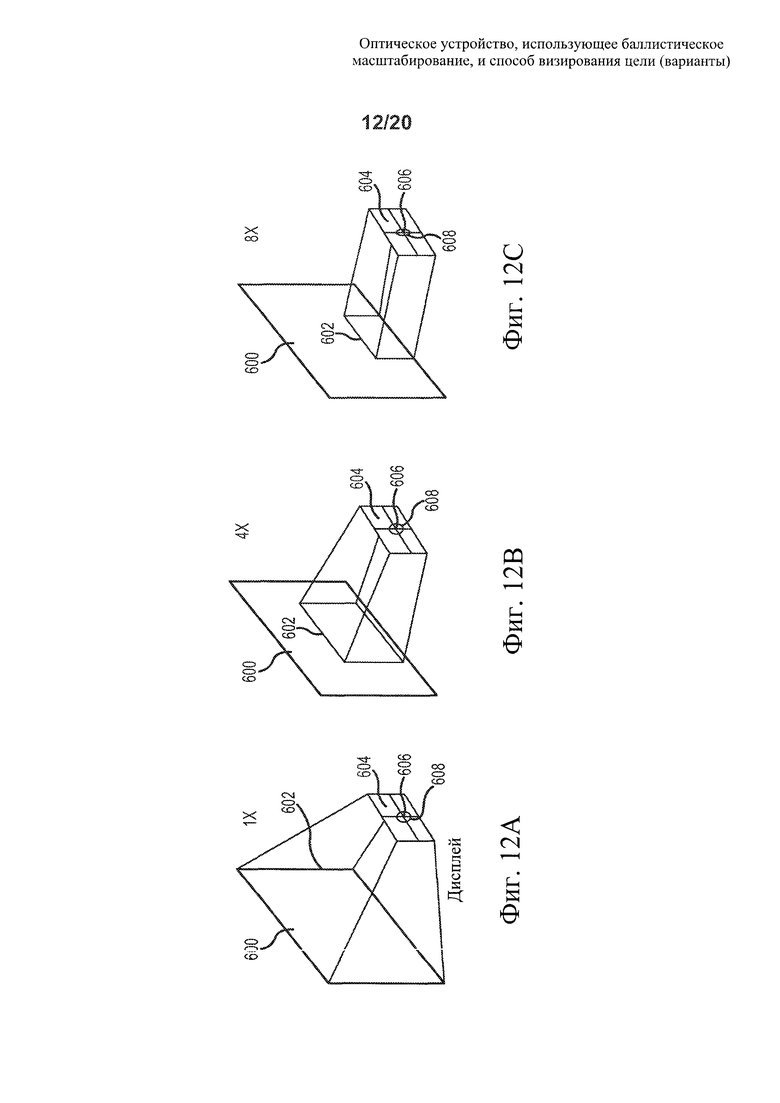
[0031] Фиг. 12А-12С изображает сравнения между захватываемым полем зрения и отображаемым видом для прицела, использующего технологию баллистического масштабирования.
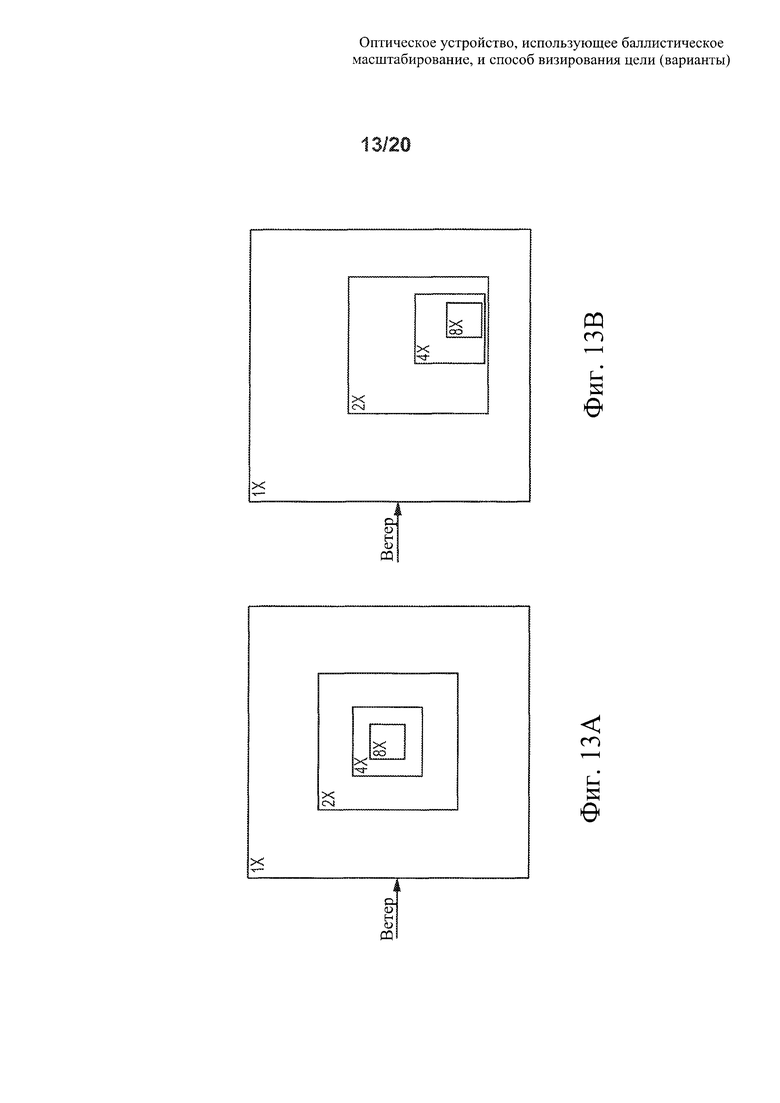
[0032] Фиг. 13А изображает представляющую интерес область для различных увеличений традиционной оптической системы масштабирования.
[0033] Фиг. 13В изображает представляющая интерес область для различных увеличений системы баллистического масштабирования в соответствии с одной формой осуществления данного изобретения.
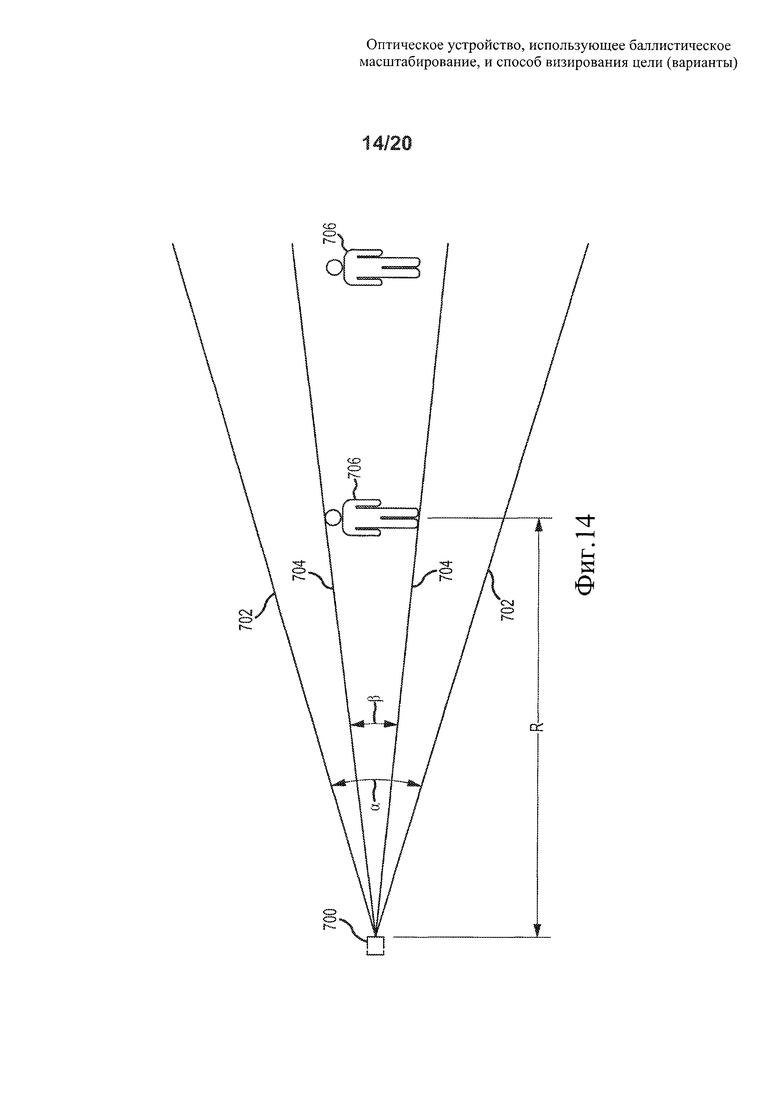
[0034] Фиг. 14 изображает зависимость между полем зрения и дальномерным элементом фиксированного размера.
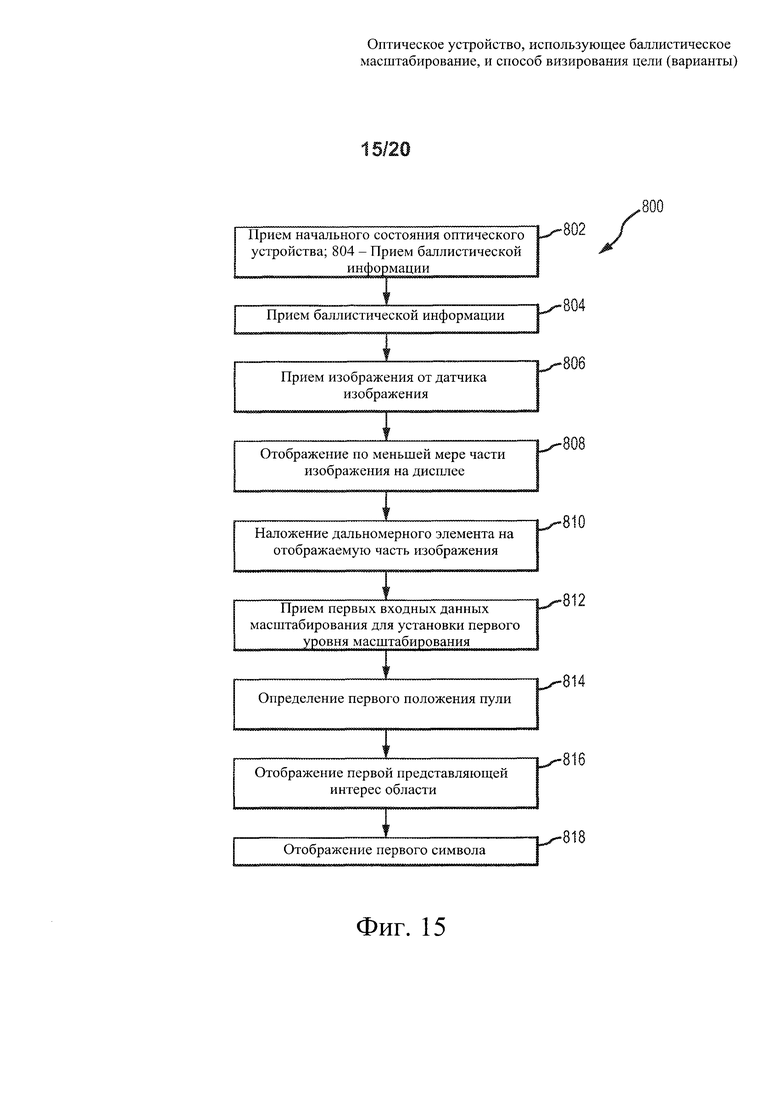
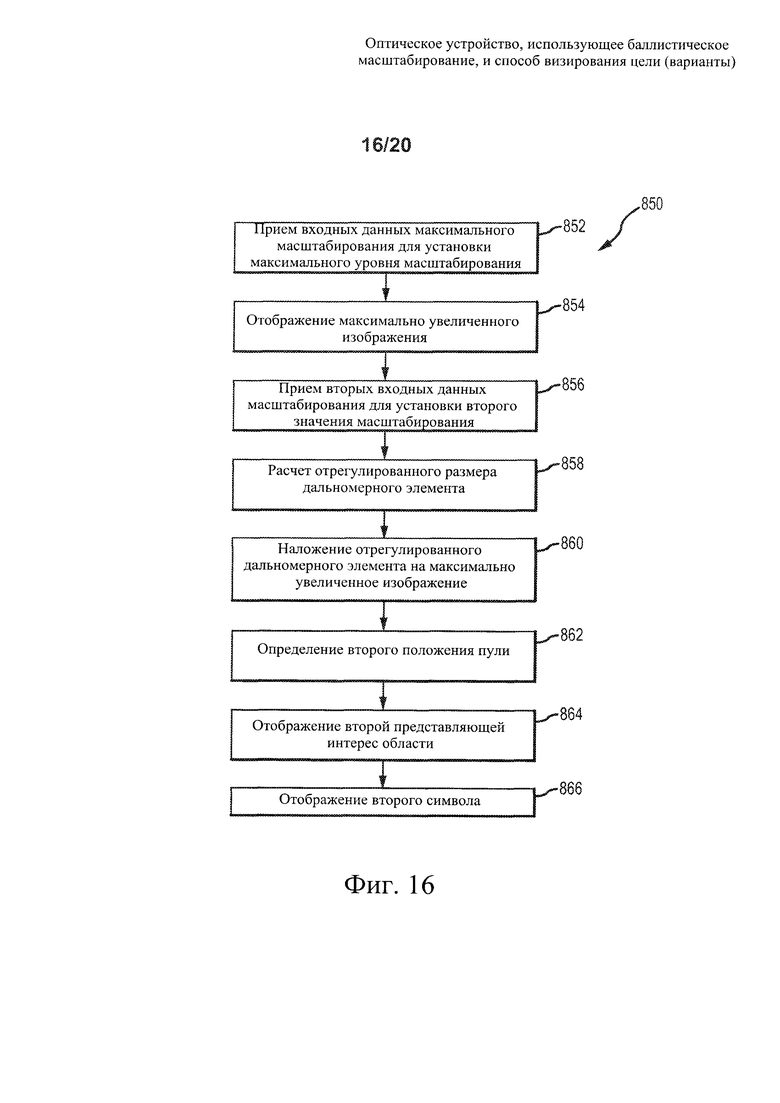
[0035] Фиг. 15-18 изображает способы визирования цели.
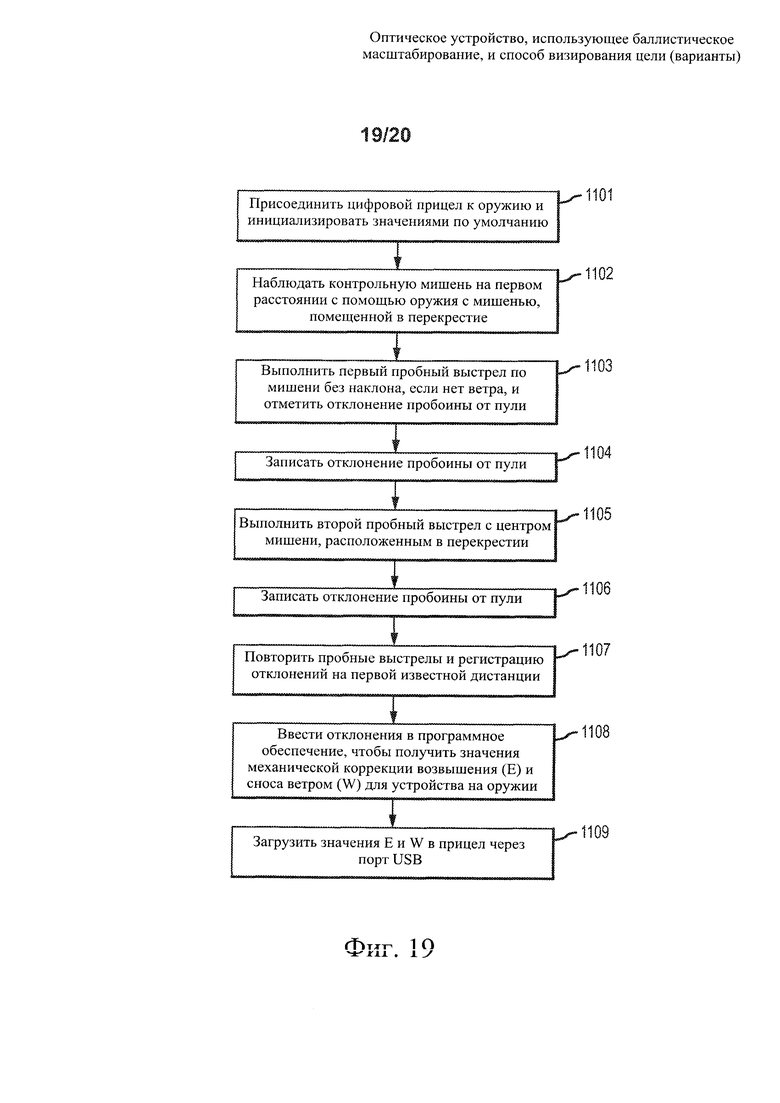
[0036] Фиг. 19 иллюстрирует процесс начального наведения или прицеливания в устройствах, показанных на фиг. 1 и на фиг. 3, на оружии, таком как винтовка.
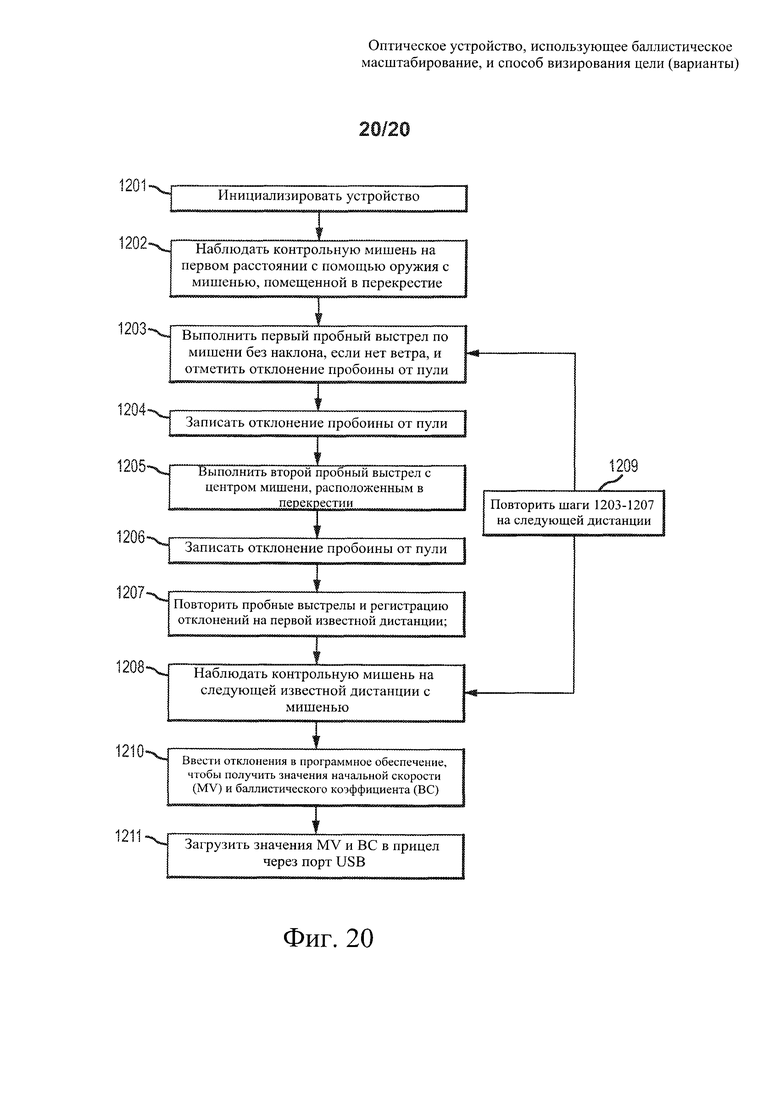
[0037] Фиг. 20 иллюстрирует процесс определения значений скорости на выходе из ствола (Muzzle Velocity, MV) и баллистической характеристики (Ballistic Characteristic, ВС) для устройств, показанных на фиг. 1 и фиг. 3, на конкретном оружии, таком как винтовка, для различных дистанций.
Подробное описание
[0038] Ссылка будет теперь сделана подробно на прилагаемые чертежи, которые по меньшей мере помогают в иллюстрировании подходящих форм осуществления новой технологии, предусмотренной данным изобретением.
[0039] Обратимся теперь к фиг. 1, на которой показана одна форма осуществления цифровой системы 100 прицела для наведения на цель. В показанной форме осуществления изобретения система 100 содержит удлиненный полый цилиндрический корпус 101, имеющий передний конец и задний конец. Корпус может быть изготовлен из анодированного алюминия или аналогичного материала. Передняя линза 102 и датчик 103 изображения установлены вблизи переднего конца корпуса 101. Передняя линза 102 установлена так, чтобы фокусировать свет от цели на датчик 103 изображения. Процессор 104 обработки изображений, датчик 105 наклона и батареи 106 установлены в цилиндрическом корпусе 101. Датчик 103 изображения и датчик 105 наклона электрически связаны с процессором 104 обработки изображений. Модуль 108 управления/дисплея и компонент 109 отображения изображения установлены вблизи заднего конца корпуса 101. Компонент 109 отображения изображения электрически связан с процессором 104 обработки изображений. Корпус 101 может содержать также встроенную систему монтажа (не изображенную) для установки прицела 100 на оружие (например, винтовку).
[0040] В этом примере осуществления датчик 103 изображения функционирует, чтобы получать исходные данные изображения цели. Процессор 104 обработки изображений функционирует, чтобы принимать исходные данные изображения от датчика 103 изображения и создавать на их основе изображение цели. Компонент 109 отображения изображения функционирует, чтобы принимать изображение цели от процессора 104 обработки изображений и отображать пользователю изображение цели, которое может облегчать наведение оружия.
[0041] Датчик 105 наклона функционирует для измерения угла наклона прицела 100 и формирования на его основе данных углового положения. Используемый здесь термин "угол наклона" означает угловую ориентацию прицела 100 относительно центральной оси цилиндрического корпуса 101. Угол наклона выражается как величина в градусах угла поворота (то есть, углового смещения) устройства во время позиционирования по горизонтальной оси, проходящей через устройство, от исходной ориентации (например, вертикальной). В одной форме осуществления изобретения датчиком наклона является акселерометр. Датчик 110а движения глаза, расположенный вблизи окуляра 110 и функционально связанный с процессором 104, также может использоваться, как описано здесь.
[0042] Процессор 104 обработки изображений предпочтительно содержит микропроцессор и запоминающее устройство, хранящее статическую информацию и динамическую информацию, наряду с программным обеспечением, которое функционирует, чтобы принимать данные углового положения отдатчика 105 наклона и производить на их основе корректировку отображения цели. Таким образом, изменяя угол наклона, например, посредством поворота по часовой стрелке/против часовой стрелки оружия, прикрепленного к прицелу 100, в то время как оружие направлено или нацелено по оси, проходящей через ствол оружия, можно облегчить управление одной или несколькими функциями наведения, связанными с устройством. В альтернативных формах осуществления изобретения это управление и функциональные возможности регулирования датчика наклона могут быть заменены или дополнены кнопкой 105а, выключателем, круглой ручкой или другим органом.
[0043] Статическая информация, хранящаяся в запоминающем устройстве процессора 104 обработки изображений, включает координаты местоположения оптической фокальной точки на датчике 103 изображения. Так как датчик 103 изображения является двумерной матрицей светочувствительных элементов, известных как пикселы, координаты х-у фокальной точки линзы на матрице определяет исходное положение центра изображения для отображения. Эти координаты программируют энергонезависимое запоминающее устройство датчика изображения.
[0044] В форме осуществления изобретения, показанной на фиг. 1 и 2, изменение угла наклона может управлять такими функциями прицеливания как регулировка поля зрения, коррекция снижения траектории и/или коррекция на снос ветром. Пороговый угол наклона может определять отдельные функции прицела 100. В одной форме осуществления изобретения пользователь может управлять полем зрения (то есть, эффективным увеличением) отображаемого изображения цели, придавая прицелу 100 угол наклона больший, чем пороговый угол. Когда датчик 105 наклона определяет, что угол наклона больше порогового угла в любом направлении, процессор 104 обработки изображений может реагировать на это регулировкой поля зрения. Увеличивается или уменьшается ли поле зрения и скорость, с которой это делается, может зависеть от направления и величины угла наклона.
[0045] В одной форме осуществления изобретения пороговый угол наклона равен 10 градусам. Таким образом, применяя угол наклона 30 градусов вправо (то есть, по часовой стрелке), можно заставить поле зрения быстро уменьшаться (то есть, увеличивать увеличение), таким образом быстро заставляя предметы на изображение цели казаться пользователю большими. Наоборот, применяя угол наклона 15 градусов влево (то есть, против часовой стрелки), можно заставить поле зрения медленно увеличиваться (то есть, уменьшать увеличение), таким образом медленно заставляя предметы на изображении цели казаться пользователю меньшими.
[0046] Поле зрения изображения цели может иметь пределы, определяемые разрешением датчика 103 изображения и разрешением компонента 109 отображения изображения. Например, датчик 103 изображения может иметь разрешение 2560×1920 пикселов и компонент 109 отображения изображения может иметь разрешение 320×240 пикселов. Минимальное поле зрения изображения цели (то есть, максимальное увеличение) таким образом может быть достигнуто, когда данные от одного пиксела на датчике 103 изображения управляют выводом одного пиксела на компоненте 109 отображения изображении. Таким образом при максимальном увеличении в данном примере компонент 109 отображения изображения может показывать одну восьмую данных, собираемых датчиком 103 изображения. Максимальное поле зрения изображения цели (то есть, минимальное увеличение) может быть достигнуто, когда компонент 109 отображения изображения, имеющий 320×240 пикселов, показывает все данные, собранные датчиком 103 изображения, который имеет 2560×1920 пикселов. Таким образом при минимальном увеличении в данном примере, данные от блоков пикселов, собираемые датчиком 103 изображения, объединяются в процессе, называемом "биннинг", и затем посылаются, чтобы управлять одним пикселом на компоненте 109 отображения изображении. Чтобы исполнять функцию определения дальности с высокой степенью разрешения, поле зрения изображения цели должно постепенно изменяться между максимумом и минимумом малыми шагами. Таким образом, поле зрения датчика 103 изображения изменяется от 2560×1920 пикселов до 320×240 пикселов малыми шагами, и разрешение изображения, отображаемого компонентом 109 отображения изображения, останется фиксированным при 320×240 пикселов. Таким образом, в одном примере осуществления прицел имеет регулируемую кратность увеличения от 8 до 1. Снова, одна или несколько кнопок I05a, круглых ручек или выключателей также могут выполнять регулировки, описанные выше в связи с датчиком 105 наклона.
[0047] Обратимся теперь к фиг. 2, на которой показана одна форма осуществления накладываемого изображения 200. Микропроцессор 104 может накладывать изображение 200 на отображаемое изображение цели. Накладываемое изображение 200 отображает пользователю дополнительную информацию, которая может облегчать наведение оружия. В показанной на фиг. 2 форме осуществления накладываемое изображение 200 содержит перекрестие 201, дальномерный круг 202, символ 203 поправки на снос ветром, цифровую индикацию 204 дальности и отметки 205. Перекрестие 201 используется для определения позиции прицеливания на изображении цели. Цифровая индикация 204 дальности отображает дистанцию. Единицами измерения дальности могут быть выбираемые пользователем ярды или метры. Символ 203 поправки на снос ветром совместно с отметками 205 указывает величину для корректируемого сноса ветром в милях в час или километрах в час. С произвольными выбранными английскими единицами накладываемое изображение 200, как показано, указывает, что корректируется снос дующим справа ветром 3 мили/час (4,83 км/час) и корректируется понижение траектории пули, вычисленное для расстояния до цели 525 ярдов (480 м).
[0048] Показанное накладываемое изображение 200 содержит дальномерный элемент 202. В изображенной форме осуществления изобретения дальномерный элемент 202 представляет собой дальномерный круг, но могут использоваться и элементы другой формы. Прицел 100 может измерять расстояния до цели (то есть, дальность) с помощью "дальнометрического способа", использующего дальномерный круг 202. Дальномерный круг 202 представляет заранее заданный размер цели. Чтобы определять дальность до цели, поле зрения может регулироваться (например, применением угла наклона больше 10 градусов), в то время как размер дальномерного круга 202 поддерживается постоянным до тех пор, пока изображение цели полностью не заполнит дальномерный круг. В качестве варианта может быть нажата кнопка 105а, если она присутствует на прицеле 100, повернут барабанчик и т.д. Процессор 104 обработки изображений может тогда вычислить дистанцию до цели, используя тригонометрию. Например, три точки, состоящие из видимой верхней границы цели, видимой нижней границы цели и передней линзы 120, определяют прямоугольный треугольник. Расстояние от вершины до нижней границы цели определяет первую сторону треугольника. Дальномерный круг обеспечивает измерение угла, противоположного первой стороне. Таким образом, процессор 104 обработки изображений может вычислять длину прилегающей стороны треугольника, то есть, дистанцию до цели.
[0049] При очень больших дистанциях до цели ее изображение может не быть достаточно большим, чтобы заполнить дальномерный круг 202 даже при максимальном увеличении (то есть, минимальном поле зрения). Поэтому в одной форме осуществления изобретения, когда максимальное увеличение было достигнуто, процессор 104 обработки изображений может начать уменьшать размер дальномерного круга 202 в ответ на продолжающийся ввод данных для уменьшения поля зрения (например, при продолжении удержания прицела 100 под углом свыше порогового угла). Таким образом, определение дальности может быть облегчено даже на дистанциях за пределами максимального увеличения. Этот процесс дополнительно описан ниже.
[0050] Действие силы тяжести на пулю (например, понижение траектории пули) может рассчитываться и поправка на него может вводиться микропроцессором 104 обработки изображений на основании таких переменных как дальность и баллистические данные, связанные с пулей. Баллистические данные могут вводиться в прицел 100 и храниться в нем. Примеры таких вводимых данных описаны ниже со ссылкой на дополнительные примеры осуществления. Чтобы облегчать внесение поправки на понижение траектории пули, процессор 104 обработки изображений может сдвигать изображение цели вверх относительно перекрестия 201 на основании расчетного понижение траектории пули, таким образом заставляя стрелка фактически целиться в точку выше цели, хотя изображение будет казаться зрителю расположенным с центром на перекрестии. В других формы осуществления изобретения, описанных ниже, процессор 104 обработки изображений может отображать представляющую интерес область в отношении пули на некоторой дистанции от стрелка. Стрелок тогда был бы обязан поднимать оружие так, чтобы выровнять перекрестие на цели. Это действие вносит поправку на понижение траектории пули в любой точке по траектории пули.
[0051] Действие ветра на пулю (например, снос боковым ветром) может рассчитываться и поправка на него может вводиться процессором 104 обработки изображений на основании таких переменных как дальность, баллистические данные и параметры ветра во время стрельбы. Параметры ветра могут измеряться или оцениваться с использованием способов, известных в данной области техники. Снос боковым ветром может вводиться в процессор 104 обработки изображений применением соответствующего угла наклона к прицелу 100. Чтобы облегчать внесение поправки на снос ветром, процессор 104 обработки изображений может сдвигать изображение цели горизонтально относительно перекрестия 201 на основании рассчитываемого или известного сноса ветром, таким образом заставляя стрелка целиться в точку с той стороны от цели, откуда дует ветер; в других формах осуществления изобретения, описанных ниже, процессор 104 обработки изображений может отображать представляющую интерес область в отношении пули на некоторой дистанции на основании данных сноса ветром. Стрелок тогда был бы обязан перемещать оружие, чтобы выровнять перекрестие на цели. Это действие вносит поправку на снос ветром в любой точке по траектории пули.
[0052] Пользователь может управлять функцией коррекции на снос ветром, применяя к прицелу 100 угол наклона меньше порогового угла. Величина и направление наклона, применяемого к прицелу 100, может управлять величиной и направлением входных данных поправки на снос ветром, таким образом управляя внесением поправки на снос ветром. Например, если пороговый угол наклона 10 градусов, то угол наклона 5 градусов вправо (то есть, по часовой стрелке) может соответствовать коррекции на снос ветром, подходящей для компенсации ветра 10 миль/час (16,1 км/час), дующего с правой стороны от пользователя. В свою очередь угол наклона 3 градуса влево (то есть, против часовой стрелки) может соответствовать внесению подходящей поправки на снос ветром, чтобы компенсировать ветер 7 миль/час (11,3 км/час), дующий слева.
[0053] Символ 203 поправки на снос ветром может облегчать внесение поправки на снос ветром, позволяя пользователю более точно вводить данные сноса ветром. Процессор 104 обработки изображений может заставлять символ 203 поправки на снос ветром смещаться влево и вправо относительно перекрестия 201 в ответ на величину и направление угла наклона, таким образом указывая пользователю величину и направление входных данных сноса ветром, передаваемых в процессор 104 обработки изображений.
[0054] Кроме того, процессор 104 обработки изображений регулирует слева направо положение отображаемого изображения цели так, что цель остается с центром в перекрестии даже при том, что линия прицеливания оружия корректируется на снос ветром, указываемым символом 203 коррекции. Например, в примере иллюстрации на фиг. 2 символ 203 коррекции на снос ветром указывает ввод поправки на снос ветром справа налево в 3 единицы (например, миль/час), в то время как регулировка ствола оружия (то есть, реальная точка цели) автоматически регулируется вправо для этого 3 миль/час (4,83 км/час) бокового ветра, потому что видимое стрелком отображаемое изображение соответственно сдвигается. Поэтому стрелок должен поддерживать эти 3 единицы наклона при стрельбе из оружия, чтобы автоматически корректировать снос ветром. В дополнительных формах осуществления изобретения наклон не должен поддерживаться, поскольку стрелок может возвратить огнестрельное оружие в вертикальное положение перед стрельбой.
[0055] Чтобы первоначально выверить устройство 100 на оружии, таком как винтовка, сначала оно должно быть установлено на оружии, и "пристреляно" на известной дистанции. Последовательность операций показана на фиг. 19. Эта процедура используется, чтобы компенсировать в устройстве разброс механических параметров выверки относительно ствола оружия. Первое вертикальное регулирование называется механической "вертикальной коррекцией" на базовом расстоянии. Обычно для винтовки оно выполняется на расстоянии до цели 100 ярдов (91,4 м). Второе регулирование, чтобы компенсировать горизонтальный разброс параметров при установке, называется механической "горизонтальной регулировкой". Для устройства 100 эти регулировки выполняются программным обеспечением, находящимся на внешнем устройстве, таком как ноутбук, планшет iPad, смартфон или персональный компьютер, которое связано с микропроцессором 104 в устройстве 100.
[0056] Первоначально значения по умолчанию, предполагающие совершенное выравнивание ствола, ожидаемое значение начальной скорости (Muzzle Velocity, MV) и ожидаемый баллистический коэффициент (Ballistic Coefficient, ВС), загружаются как значения по умолчанию в устройство 100; это показано как технологический шаг 1101 на фиг. 19. Затем оружие привязывается к дальности до мишени, где мишень помещается на известном расстоянии, например, 100 ярдов (91,4 м), и устройство 100 нацеливается на эту мишень во время операции 1102. Предпочтительно это выполняется, когда нет никакого бокового ветра, чтобы воздействовать на выполняемые коррекции. Затем на технологическом шаге 1103 выполняется первый пробный выстрел с вертикальным устройством 100 (без наклона) и нацеливанием так, чтобы перекрестие находилось в центре изображения цели. Во время операции 1104 отклонение попадания пули от центра мишени измеряется и регистрируется. Во время операции 1105 выполняется второй пробный выстрел и во время операции 1106 регистрируется отклонение попадания пули от центра мишени. Эти пробные выстрелы повторяются несколько раз во время операции 1107. Во время операции 1108 все эти зарегистрированные значения отклонений вводятся в программное обеспечение, чтобы получить значения механических вертикальной и горизонтальной поправок для устройства 100 на конкретном оружии. Наконец, во время операции 1109 определяемые программным обеспечением значения вертикальной и горизонтальной поправок для устройства 100 загружаются в прицельное устройство 100 через его порт универсальной последовательной шины (Universal Serial Bus, USB).
[0057] Чтобы обеспечивать надлежащие данные начальной скорости (MV) и баллистического коэффициента (ВС), которые привязаны к оружию, необходимы дополнительные опытные стрельбы на различных дистанциях. Эти операции объясняются со ссылкой на фиг. 20. Эти шаги те же самые как на фиг. 19 до шага 1208. Во время операции 1209 предыдущие шаги повторяются для нескольких различных дистанций до цели. Отклонения затем вводятся в программное обеспечение во время операции 1210, чтобы получить лучшее согласование данных и получить точные данные начальной скорости и баллистического коэффициента для конкретного патрона, используемого в оружии. Эти значения затем загружаются в устройство 100 во время операции 1211.
[0058] Код программного обеспечения, используемый для получения данных MV и ВС, основан на ньютоновских уравнениях физики для пуль, которые хорошо известны. Примеры уравнений для этой цели могут быть найдены в работе Modern Practical Ballistics, by Arthur J. Pejsa, Kenwood Publishing, 2nd edition. Как только эти значения MV и ВС для конкретной комбинации оружия/устройства наведения на цель станут известны и загружены в процессор 104 обработки изображений, эксплуатация устройства 100 не вызовет затруднений.
[0059] Во время эксплуатации пользователь устройства 100 просто наводит оружие на цель, наклоняет оружие больше, чем на 10 градусов против часовой стрелки, чтобы визуально увеличить поле зрения на цели, затем, когда устанавливается подходящий размер на дисплее, возвращает оружие к вертикали, немного наклоняет оружие влево или вправо в зависимости от воспринимаемого бокового ветра и производит выстрел. Дальность корректируется автоматически посредством микропроцессора, сдвигающего отображаемое изображение вверх или вниз. Перекрестие остается в центре, и поправка соответственно дальности автоматически обеспечивается и отображается. Поправка на снос ветром автоматически выполняется стрелком, наклоняющим оружие к его оценке желательной поправки на смещение цели, обеспечиваемой символом 203 поправки на снос ветром на отображении изображения, показанном на фиг. 2. Изображение цели автоматически сдвигается вправо или влево на дисплее так, чтобы перекрестие оставалось в центре, и стрелок целится в отображаемое изображение с перекрестием, находящимся в центре, и производит выстрел при поддержании желаемого наклона, таким образом внося поправку на снос ветром.
[0060] Обратимся теперь к фиг. 3-4, на которых показана вторая форма осуществления прицела 300. В показанной форме осуществления устройство 300 содержит удлиненный полый цилиндрический корпус 301, имеющий передний конец и задний конец. Корпус может быть изготовлен из анодированного алюминия или аналогичного материала. Передняя линза 302 и датчик 303 изображения вместе установлены в герметизированный блок вблизи переднего конца корпуса 301. Передняя линза 302 установлена так, чтобы фокусировать свет от цели на датчике 303 изображения. Передняя линза 302 и датчик 303 являются частью герметизированного сменного модуля 319 камеры. Датчик 303 изображения установлен на схемной плате и предпочтительно содержит датчик, процессор обработки изображений и энергонезависимое запоминающее устройство.
[0061] Микропроцессор 304, датчики давления и температуры (не показаны), датчик 305 наклона и батареи 306 установлены на схемной плате 326 в модуле 308 управления/дисплея. Датчик 303 изображения, датчики температуры и давления, и датчик 305 наклона электрически связаны с микропроцессором 304, как описано ниже.
[0062] Модуль 308 управления/дисплея и компонент 309 отображения изображения монтируются съемно вблизи заднего конца корпуса 301. Компонент 309 отображения изображения электрически связан с микропроцессором 304. Корпус 301 содержит также встроенную систему 311 монтажа для установки прицела 300 на оружие (например, винтовку).
[0063] Прицел 300 может включать некоторые или все возможности первой формы осуществления прицела 100, включая, например, такие возможности как регулирование поля зрения, коррекция на понижение траектории пули (на дальность) и/или коррекция на снос ветром. Кроме того, прицел 300 предпочтительно содержит сменные модули 319 камеры, состоящие из передней линзы 302 и датчика 303 изображения в оправе 320 линзы. Датчик 303 изображения установлен под прямым углом к оптической оси линзы на схемной плате, прикрепленной к заднему концу оправы 320 и предпочтительно герметично присоединенной к ней. Схемная плата датчика изображения включает идущий коаксиально назад гнездовой соединитель 324 для вставки штырькового ножевого соединителя, выступающего из переднего конца модуля 308 управления/дисплея, описанного ниже.
[0064] Модули 319 камеры крепятся к корпусу 301 посредством внешнего снабженного резьбой кольца 318, которое направляет и прочно фиксирует оправу 320 линзы в точных позициях фиксации и зажима в корпусе 301 посредством фиксирующих поверхностей 321 (показанных на фиг. 9). Эта особенность сменного модуля камеры позволяет одному прицелу 300 или устройству наведения использоваться во многих различных обстоятельствах, таких как ситуации большой или малой дистанции, без потребности повторно пристреливаться в другом модуле 319 камеры. Это может быть очень выгодно пользователю.
[0065] Обратимся теперь к фиг. 5-8, на которых показана одна форма осуществления съемного модуля 308 управления/дисплея. Модуль 308 управления/дисплея съемно крепится кольцом 307 к задней части удлиненного цилиндрического корпуса 301. Съем модуля 308 управления/дисплея с цилиндрического корпуса 301 может облегчать замену батареи и/или облегчать конфигурацию установочных параметров устройства, как описано ниже. Кольцо 307 может использовать систему монтажа байонетного, резьбового или любого другого подходящего типа, которая может обеспечивать механическое соединение между модулем управления/дисплея 308 и цилиндрическим корпусом 301 во время стрельбы из оружия.
[0066] Переднее отверстие кольца 307 насаживается на внешнюю поверхность заднего конца цилиндрического корпуса 301. Внешняя поверхность заднего конца цилиндрического корпуса 301 в этом примере осуществления имеет кольцевую канавку. Внутренняя поверхность кольца 307 имеет кольцевой поясок, сконфигурированный так, чтобы вставляться в канавку, так что кольцо 307 монтируется на цилиндрический корпус 301 с возможностью вращения. Внутренняя поверхность заднего отверстия кольца 307 снабжена резьбой. Внешняя поверхность переднего конца модуля 308 управления/дисплея аналогично снабжена резьбой, так что модуль 308 управления/дисплея может с помощью резьбы крепиться к цилиндрическому корпусу 301 посредством вращения кольца 307. Таким образом, кольцо 307 позволяет модулю 308 управления/дисплея присоединяться к цилиндрическому корпусу 301 и отсоединяться от него без вращения модуля 308 управления/дисплея относительно цилиндрического корпуса 301. Это, в свою очередь, позволяет использование электрических соединителей штепсельного или байонетного типа между модулем 308 управления/дисплея и модулем 319 камеры.
[0067] Модуль 308 управления/дисплея содержит узел 310 линзы окуляра. Узел 310 линзы окуляра облегчает рассмотрение компонента 309 отображения изображения. В одной форме осуществления изобретения расстояние от линзы окуляра в узле 310 линзы окуляра до компонента 309 отображения изображения может регулироваться вручную, чтобы облегчать диоптрическую коррекцию. Например, узел 310 линзы окуляра может быть с помощью резьбы установлен в модуль 308 управления/дисплея так, чтобы вращение по часовой стрелке узла 310 линзы окуляра заставляло расстояние от линзы окуляра до компонента 309 отображения изображения уменьшаться, и наоборот.
[0068] Как лучше всего показано на фиг. 8, модуль управления/дисплея содержит часть 313 управления, содержащую схемную плату 326, к которой крепятся батареи 306, датчик наклона, датчик давления и температурный датчик, и которая связана с микропроцессором 304, в свою очередь связанным с элементом 309 отображения в части 315 дисплея модуля 308 управления/дисплея, передний конец платы схемы 326 содержит ножевой штырьковый соединитель 322, который сопрягается с гнездовым соединителем 324, чтобы надежно соединять датчик 303 изображения с микропроцессором 304, который установлен на схемной плате 326, когда модуль 308 управления/дисплея установлен в корпус 301, как описано выше.
[0069] Отделение модуля 308 управления/дисплея от цилиндрического корпуса 301 позволяет пользователю вводить информацию, которая будет храниться в электронном запоминающем устройстве микропроцессора 304. Такая информация может включать баллистические данные, например, температуру окружающей среды, давление, начальную скорость, силу сопротивления воздуха и/или баллистический коэффициент, связанный с одним или несколькими типами пули. В примере осуществления устройства 300 удаление модуля 308 управления/дисплея из цилиндрического корпуса 301 открывает порт 312 соединения с компьютером, который осуществляет электрическое соединение с процессором 304 через схемную плату 326. В одной форме осуществления порт 312 соединения с компьютером является портом USB. Модуль 308 управления/дисплея таким образом может быть связан с компьютером, имеющим соответствующее прикладное программное обеспечение, способное осуществлять связь с процессором 304 через порт 312 соединения с компьютером. Баллистические данные для одного или нескольких типов патронов с пулями могут тогда вводиться в прицел 300 и храниться в нем для использования, связанного с вычислениями в полевых условиях траектории пули процессором 304, чтобы облегчать наводку оружия, как описано выше.
[0070] Обратимся теперь к фиг. 9, на которой показана одна форма осуществления сменного модуля 319 линзы. В показанной форме осуществления модуль линзы содержит оправу 320 линзы, имеющую фиксирующие поверхности 321. Фиксирующие поверхности 321 облегчают надлежащее центрирование сменного модуля 319 линзы в корпусе 301. Как отмечено выше, датчик 303 изображения предпочтительно содержит энергонезависимое запоминающее устройство. Энергонезависимое запоминающее устройство хранит координаты (х, у) пиксела в массиве пикселов датчика 303 изображения, который находится по оптической оси модуля 319 камеры (упомянутый здесь как "опорный пиксел"). Когда сменный модуль 319 линзы установлен в устройство 300, микропроцессор 304 может функционировать для считывания координат опорного пиксела, чтобы установить эталонную точку на изображении цели. Таким образом, каждый из сменных модулей 319 линзы, который может быть установлен в устройство 300, является автономным и герметизированным. Кроме того, описанные здесь регулируемые характеристики не зависят от смены модулей 319 камеры.
[0071] Вследствие небольших производственных дефектов (например, несовершенств линз), оптическая ось модуля 319 камеры может не совпадать точно с продольной центральной осью модуля 319 камеры. Предпочтительно, опорный пиксел определяется в качестве конечного шага в процессе изготовления модуля 319 линзы. Чтобы определить опорный пиксел, сменный модуль 319 линзы может соединяться с устройством для калибровки (не показано), содержащим поверхности, которые сопрягаются с фиксирующими поверхностями 321. Устройство для калибровки кроме того включает калибровочную мишень, расположенную так, что, когда сменный модуль 319 линзы установлен в устройство для калибровки, центральная ось модуля 319 линзы направляется на калибровочную мишень. Изображение калибровочной мишени тогда может быть получено с помощью датчика 303. Местоположение опорного пиксела тогда может быть определено посредством анализа изображения, путем определения, какой пиксел датчика 303 захватил свет, исходящий из центра калибровочной мишени. Координаты опорного пиксела тогда могут быть записаны (например, запрограммированы "пережиганием перемычек") в энергонезависимое запоминающее устройство датчика 303 изображения посредством устройства для калибровки.
[0072] Обратимся теперь к фиг. 10, на которой показаны четыре примера изображений меню, предоставляемых модулем управления/дисплея цифрового прицела для наведения на цель. В одной форме осуществления модуля 308 управления/дисплея отделение модуля 308 управления/дисплея от цилиндрического корпуса 301 позволяет пользователю сделать выбор в полевых условиях таких функций как размер дальномерного круга 202, максимальная дальность масштабирования и тип пули.
[0073] Эти функции предпочтительно организованы в меню. Например, меню патрона может отображать несколько типов патрона. Изменение типа патрона в меню заставляет соответственно изменяться баллистические данные, значения MV и ВС, используемые при расчете траектории процессором 304.
[0074] В одной форме осуществления изобретения пользователь может двигаться поэтапно по различным меню, изменяя угол наклона отделяемого модуля 308 управления/дисплея. Например, первое меню появляется при угле наклона 0 градусов, второе меню появляется при угле наклона 90 градусов, третье меню появляется при угле наклона 180 градусов и четвертое меню может быть представлено при угле наклона 270 градусов. Пользователь может двигаться поэтапно по различным вариантам выбора в каждом меню посредством использования кнопок 314, 316. Таким образом, пользователь может выполнять в полевых условиях изменения для таких функций как размер дальномерного круга 202, максимальная дальность масштабирования и баллистические данные, связанные с одним или несколькими типами патрона с пулей. В других формах осуществления изобретения датчик движения глаза, описанный выше, может использоваться, чтобы двигаться поэтапно по меню. Датчик движения глаза может регистрировать определенные преднамеренные перемещения глаза и соответственно настраивать пункты в меню. Например, датчик движения глаза может регистрировать перемещение глаза вниз и направлять сигнал в процессор, чтобы выделить пункт меню ниже предыдущих пунктов меню. Перемещение глаза влево или вправо может выбирать или отменять пункты меню. Преднамеренное мигание глазом, например, имеющее продолжительность дольше, чем заранее заданное время, может также использоваться, чтобы выбирать или отменять вариант выбора. Действия, предпринимаемые другими перемещениями глаза, также предполагаются.
[0075] Включение прицела 100 или 300 предпочтительно достигается удалением крышки передней линзы (не описанной) с прицела. Перевод прицела в состояние готовности с низкой потребляемой мощностью достигается установкой крышки передней линзы обратно на прицел. Разумеется, удаление батарей лишит устройство возможности запоминания данных, но не будет стирать статическую информацию, хранящуюся в энергонезависимом запоминающем устройстве.
[0076] Описанные здесь технологии могут использоваться также в прицельном или оптическом приспособлении, которое отображает положение пули на ее баллистической кривой, когда уровень масштабирования увеличивается или уменьшается. Типичная обстановка представлена на фиг. 11. Как описано выше, когда пуля движется от винтовки к намеченной цели, несколько сил воздействуют на полет пули. Сила тяжести заставляет пулю снижаться по высоте, когда пуля движется от огнестрельного оружия к цели. Если охотник 500 находится близко к его цели 502, пуля снижается очень немного. Эта траектория на коротких дистанциях близка к оптическому пути 504. Однако улучшения в огнестрельном оружии и боеприпасах позволили охотникам вести стрельбу по дичи с больших дистанций. На этих больших дистанциях сила тяжести заставляет пулю снижаться по высоте более существенно, как представлено баллистической траекторией 506 на фиг. 11. Другие факторы также влияют на полет пули. Например, боковой ветер заставляет пулю сдвигаться горизонтально по пути полета пули. Компенсация в оптическом устройстве воздействия ветра на полет пули упоминается часто как введение поправки на снос ветром. Влажность, высота, температура и другие факторы окружающей среды также могут воздействовать на полет пули.
[0077] Чтобы должным образом визировать цель со значительного расстояния, типичные оптические устройства (то есть оптические устройства, которые используют множество линз по оптической пути, без датчика изображения) могут регулироваться для повышения увеличения по оптическому пути устройства. То есть повышение увеличения увеличивает видимый размер цели по прямой линии между прицельным приспособлением и целью. Однако, чтобы компенсировать понижение траектории пули, пользователь должен отрегулировать положение цели в видоискателе, немного поднимая огнестрельное оружие, таким образом выравнивая другой элемент прицеливания на цели на основании дальности до нее. Об этом дополнительном шаге часто забывают новички (или даже более опытные стрелки), которые спешат или отвлекаются, что приводит к неправильному прицеливанию. Это может привести к промаху, или что еще хуже, к не летальному выстрелу. В так называемой технологии "баллистического масштабирования", описанной ниже, прицел показывает область около положения пули на некотором заданном расстоянии от стрелка, таким образом заставляя стрелка повышать, понижать или другим образом подстраивать положение огнестрельного оружия, чтобы компенсировать снижение траектории пули или воздействие бокового ветра.
[0078] Описываемые здесь технологии баллистического масштабирования отличаются от известного уровня техники тем, что повышение увеличения (или масштабирование) происходит по баллистической траектории 506 пули. Для любой известной баллистической информации (например, калибра пули, скорости на выходе из ствола, скорости бокового ветра и т.д.) положение пули известно на любой дистанции от огнестрельного оружия. Технологии, описанные здесь, изменяют масштаб изображения по этой баллистической траектории 506 так, как изображено на фиг. 11. Прицел 508 захватывает поле зрения (Field Of View, FOV) (определяемое линиями 510). Однако прицел 508 отображает пользователю только часть поля 510 зрения. Эта отображаемая часть (называемая также представляющей интерес областью (Region Of Interest, ROI)) представляет собой область поля зрения вокруг положения пули. Многочисленные представляющие интерес области 512 изображены на фиг. 11. Например, нулевое расстояние от прицела 512а представляет собой область вокруг пули в этой точке в пространстве. Представляющие интерес области изображены в 200 ярдах (183 м) (512b), 400 ярдах (366 м) (512b), 600 ярдах (548,6 м) (512с) и 800 (731,5 м) ярдах (512d). Значение масштабирования (описанное подробно ниже) связывается с баллистической кривой, таким образом позволяя прицелу 508 определять увеличение для заданной дальности и наоборот. Отображаемые представляющие интерес области 512 могут быть любой областью, как требуется или желательно для конкретного применения. Поскольку пуля понижается по баллистической траектории 506, охотник 500 вынужден поднять огнестрельное оружие, чтобы держать отображаемый элемент наведения расположенным должным образом на цели 502.
[0079] Фиг. 12А-12С изображают сравнения между захваченным полем зрения в зависимости от отображаемого вида для прицела, использующего технологию баллистического масштабирования, при различных уровнях масштабирования. Переворачивания изображения, вызванные линзами в прицеле, не изображены. На фиг. 12А показано изображение 600, захваченное датчиком изображения, таким как камера. Как правило, это изображение 600 представляет собой полное поле FOV датчика. Область ROI 602 представляется стрелку как отображаемое изображение 604 на дисплее. На этой фигуре ROI 602 представляет собой полное захваченное изображение 600. Элемент 606 прицеливания, такой как перекрестие, накладывается на отображаемое изображение 604. Перекрестие 606 указывает, где пуля будет расположена на конкретном расстоянии от прицела, поскольку это конкретное расстояние связано с уровнем масштабирования прицела. Дальномерный элемент 608, в данном случае в виде дальномерного круга, также накладывается на отображаемое изображение 604.
[0080] При всех уровнях масштабирования вплоть до максимального, и включая его, отображаемый размер дальномерного элемента 608 имеет один и тот же размер относительно поля FOV 600 и калиброван до известного размера цели. Таким образом, при использовании дальномерного элемента, калиброванного для шестифутовой (1,83 м) цели, когда цель "подгоняется" к дальномерному элементу (повышением увеличения), прицел способен вычислять дальность до цели на основании дальнометрического способа, как описано выше. В отличие от устройств известного уровня техники, которые повышают увеличение по оптическому пути, технология баллистического масштабирования повышает увеличение по баллистической траектории. Таким образом, так как баллистическая траектория понижается, когда расстояние от огнестрельного оружия возрастает, отображаемое изображение 604 получается из области ROI 602 при более низкой части поля FOV 600, когда уровень масштабирования возрастает. Например, фиг. 12В изображает соотношение при уровне масштабирования 4х. Здесь, захваченное изображение или поле FOV 600 неизменно относительно фиг. 12А. Область ROI 602 является меньшей, чем общее поле FOV 600, и расположена вблизи нижней области FOV 600. Область ROI 602 отображается как отображаемое изображение 604. Размер и положение элемента 606 прицеливания и дальномерного элемента 608 остаются неизменными на дисплее. Фиг. 12С изображает зависимость при уровне масштабирования 8х. Снова, захваченное изображение или поле FOV 600 без изменений относительно фиг. 12А. Область ROI 602 меньше чем общее поле FOV 600 и расположена у низа поля FOV 600. Разрешение датчика может быть приведено к разрешению дисплея биннингом пикселов или другими технологиями, известными в данной области техники. Когда масштабирование повышает увеличение, отображается все меньшая и меньшая область ROI 602. Кроме того, так как увеличение следует по баллистической траектории, центр области ROI 602 всегда находится в положении пули для этого конкретного уровня масштабирования и связанной с ним дальности. Это помогает гарантировать точный выстрел на дистанции.
[0081] На фиг. 13А изображена представляющая интерес область для различных увеличений традиционной оптической системы масштабирования. В традиционной системе масштабирования увеличение центрировано на поле FOV, а область ROI соответствует расположенной в центре части поля FOV. Таким образом, на все больших и больших расстояниях пользователь должен выравнивать различные элементы наведения с целью, чтобы гарантировать точный выстрел. Кроме того, ввиду изображенного бокового ветра, пользователь должен также использовать элементы наведения с поправкой на снос ветром, чтобы компенсировать снос боковым ветром. В этом случае пользователь должен нацеливать огнестрельное оружие влево, чтобы компенсировать перемещение вправо из-за бокового ветра.
[0082] В отличие от этого на фиг. 13В изображена представляющая интерес область для различных увеличений системы баллистического масштабирования. Здесь центр области ROI отслеживает баллистическую кривую пули так, что при каждом уровне масштабирования положение пули располагается в центре области ROI. Когда уровень масштабирования увеличивается, центр области ROI перемещается вниз согласно расчетному понижению траектории пули и перемещается горизонтально согласно расчетному отклонению пули из-за бокового ветра. Это заставляет пользователя центрировать единственную имеющуюся точку наведения на цели, чтобы легко получить точный выстрел.
[0083] На фиг. 14 изображена зависимость между полем зрения и дальномерным элементом фиксированного размера. Показан прицел 700, имеющий поле FOV (определяемое наиболее удаленными линиями 702). Внутренние линии 704 изображают величину дальномерного элемента в зависимости от поля FOV 702. Угол FOV α известен при любом уровне масштабирования. Следовательно, дальномерный элемент 704 стягивает известный угол дальномерного элемента β при любом уровне масштабирования. Пользователь может выбрать из дальномерных элементов те, размер которых установлен по размеру определенной цели 706. Например, пользователь может выбрать круг, который соответствует цели конкретного размера на известном расстоянии (например, цели в шесть футов (1,83 м) для оленя или другого крупного животного, или цели в три фута (0,91 м) для кабана или меньшей дичи). Так как есть только единственная дальность R, на которой цель 706 точно охватывается дальномерным элементом 704, прицел 700 способен определять дальность R на основании уровня масштабирования. Прицел выполняет вычисление для определения дальности R до цели 706. Эта дальность используется для вычисления баллистических данных и положения области ROI. Дальность R также может отображаться наряду с уровнем масштабирования, скоростью бокового ветра или другой информацией.
[0084] На фиг. 15-18 показаны способы визирования цели в соответствии с несколькими формами осуществления изобретения. Фиг. 15 изображает первый способ 800 визирования цели прицелом или оптическим устройством. Способ 800 начинается с операции 802, где принимается начальное состояние оптического устройства. Начальное состояние может включать размер дальномерного элемента, а также дальности, связанной с дальномерным элементом. Например, дальномерный элемент может быть основан на цели, допустим, шести футов (1,83 м), и может быть выбран пользователем в зависимости от размера ожидаемой цели. Процессор прицела связывает известный дальномерный элемент с известной дальностью, так что дальность до цели, которая плотно охватывается дальномерным элементом, известна. Баллистическая информация, такая как скорость на выходе из ствола, вес или тип пули, скорость и направление бокового ветра, атмосферное давление, крен, наклон, температура окружающей среды и другая информация, принимается во время операции 804. Как правило, большая часть этой информации программируется в запоминающий элемент прицела до использования, хотя скорость бокового ветра обычно устанавливается во время использования. Изображение, в основном поле FOV, принимается датчиком изображения во время операции 806. По меньшей мере часть этого изображения, область ROI, отображается на дисплее пользователю во время операции 810. После этого первые входные данные масштабирования могут получаться во время операции 812 и устанавливать первый уровень масштабирования. Этот уровень масштабирования соответствует известной дистанции от прицела. Ввод данных масштабирования может быть основан на действии, предпринятом со стороны пользователя, например, приведением в действие кнопки или ручки, наклоном огнестрельного оружия и т.д. Когда прицел увеличивает уровень масштабирования, положение пули на этом известном расстоянии (или уровне масштабирования), наряду со связанной с ним баллистической информацией, определяется во время операции 814. На основании значения масштабирования и положения пули область ROI, в основном вокруг положения пули, может отображаться во время операции 816. Хотя отображаемое перекрестие может использоваться для наведения, прицел может отображать символ, такой как элемент наведения, на пересечении перекрестия, чтобы дополнительно выделять положение пули.
[0085] На фиг. 16 изображен способ 850 визирования цели после того, как достигнут максимальный уровень масштабирования датчика изображения. Такое состояние может произойти, если цель чрезвычайно далека от пользователя прицела, и прицел достиг своего максимального уровня масштабирования после выполнения, например, способа 800, изображенного на фиг. 15. Способ 850 начинается с операции 852 приемом входных данных максимального масштабирования, которые устанавливают максимальный уровень масштабирования. Максимальное уровень масштабирования может определяться областью ROI датчика изображения и отображаемым изображением, например, как только разрешение области ROI датчика изображения удовлетворяет разрешению отображаемого изображения. Максимально увеличенное изображение отображается во время операции 854. После этого вторые входные данные масштабирования устанавливают второе значение масштабирования во время операции 856. В отличие от способа 800, описанного выше, дальнейшие входные данные масштабирования после достижения максимального значения масштабирования уменьшают отображаемый размер дальномерного элемента. На основании входных данных масштабирования или уровня масштабирования размер дальномерного элемента рассчитывается во время операции 858. Этот отрегулированный дальномерный элемент затем накладывается на максимально увеличенное изображение во время операции 860. Когда входные данные масштабирования прицела увеличиваются, положение пули на этой известной дистанции (или уровне масштабирования), наряду со связанной с ним баллистической информацией, определяется во время операции 862. На основании значение масштабирования и положения пули, представляющая интерес область, в основном вокруг положения пули, может быть отображена, как во время операции 864. Как и в способе 800 на фиг. 15, прицел может отображать символ, такой как элемент наведения, чтобы дополнительно выделять положение пули.
[0086] На фиг. 17 изображен способ 900 визирования цели. Способ 900 включает прием баллистической информации, вся или часть которой может храниться в запоминающем устройстве. Изображение получают от датчика изображения во время операции 904. Значение масштабирования получается во время операции 906, и траектория пули рассчитывается во время операции 908. Как и со способами, описанными выше, область ROI на основании значения масштабирования отображается во время операции 910. В основном, область ROI соответствует, по меньшей мере частично, положению пули. Хотя отображаемое перекрестие может использоваться для наведения, прицел может отображать символ, такой как элемент наведения, в пересечении перекрестия, чтобы дополнительно выделять положение пули. Наложением дальномерного элемента на часть отображаемого изображения может быть определена дальность до цели во время операции 912. Другие способы определения дальности также могут использоваться. Как только входные данные масштабирования получаются во время операции 914, например, приведением в действие пользователем кнопки, наклоном прицела и т.д., обновленная область ROI может быть отображена во время операции 916.
[0087] Другой способ 1000 визирования цели изображен на фиг. 18. Здесь изображение, принимаемое датчиком изображения, таким как камера, получается во время операции 1002. Поле зрения, которое является частью принимаемого изображения, отображается во время операции 1004. Дальномерный элемент, имеющий фиксированный размер относительно отображаемого поля зрения, отображается или накладывается на поле зрения во время операции 1006. Входные данные размера цели получаются во время операции 1008. Эти входные данные размера цели могут быть данными размера цели по умолчанию (например, для целей высотой шесть футов (1,83 м)), или входные данные могут получаться из запоминающего устройства. В других формах осуществления изобретения входные данные размера цели выбираются из множества заранее заданных размеров цели. Входные данные масштабирования, которые устанавливают значение масштабирования, получаются во время операции 1010 и дальность до цели тогда рассчитывается во время операции 1012.
[0088] Технология баллистического масштабирования, описанная здесь, может использоваться для прицелов, которые используют датчики изображения, такие как камеры. В некоторых формах осуществления использование баллистического масштабирования может выбираться как вариант выбора вместо описанного выше традиционного масштабирования или масштабирования по умолчанию (то есть системы масштабирования, в которой уровень масштабирования или увеличения возрастает по оптическому пути). Таким образом, стрелок может быть способен изменять систему масштабирования (баллистический или традиционный) как желательно для конкретного сценария, предпочтения пользователя и т.д. Также в других формах осуществления изобретения может выбираться установка оптического устройства, где изображаемое перекрестие, например, на фиг. 12А-12С, не связано с положением пули. В таких формах осуществления изобретения дисплей может представлять один или несколько элементов наведения, отделенных от перекрестия, которые связаны с положением пули на заданном расстоянии. В таких формах осуществления центр области ROI может помещаться у элемента наведения.
[0089] Обратимся теперь к фиг. 19 и 20, на которых прицел 300 может пристреливаться для каждого из до четырех видов комбинаций патрона/пули, которые используются в оружии. Чтобы первоначально выставить устройство 300 наведения на оружии, таком как винтовка, как с первой формой осуществления изобретения, описанной выше, сначала оно должно быть установлено на оружие и "пристреляно" на известном расстоянии. Последовательность операций показана на фиг. 19. Эта процедура используется, чтобы компенсировать в устройстве механические отклонения центрирования относительно ствола оружия. Первое вертикальное регулирование называется коррекцией на механическое "снижение траектории пули" на базовой дистанции. Обычно для винтовки это выполняется на дистанции до цели 100 ярдов (91,4 м). Второе регулирование, чтобы компенсировать горизонтальное отклонение в установке, называется механической "горизонтальной регулировкой". Для устройства 300 эти регулировки выполняются программным обеспечением, находящимся на внешнем устройстве, таком как ноутбук, планшет iPad, смартфон или персональный компьютер, которое затем загружается в микропроцессор 304 в устройстве 300 через порт USB 312 в модуле 308 управлении/дисплея, когда он удален из корпуса 301.
[0090] Первоначально значения по умолчанию, принимающие совершенное центрирование ствола, ожидаемое значение начальной скорости (MV) и ожидаемый баллистический коэффициент (ВС) загружаются как значения по умолчанию в устройство 300, что показано как технологический шаг 1101 на фиг. 19. Затем оружие привязывается к дальности до цели, при этом цель располагается на известной дистанции, например, 100 ярдов (91,4 м), и устройство 300 нацеливается на эту цель во время операции 1102. Предпочтительно это делается, когда нет никакого бокового ветра для воздействия на выполняемые коррекции. Затем на технологическом шаге 1103 выполняется первый пробный выстрел с устройством 300, удерживаемым вертикально (без наклона) и нацеливаемым в основном горизонтально так, что перекрестие располагается по центру на изображении цели. Во время операции 1104 отклонение попадания пули от центра мишени измеряется и регистрируется. Во время операции 1105 выполняется второй пробный выстрел и во время операции 1106 регистрируется отклонение попадания пули от центра мишени. Эти пробные выстрелы повторяются несколько раз во время операции 1107. Во время операции 1108 все эти зарегистрированные значения отклонения вводятся в программное обеспечение, чтобы получить значения механической вертикальной и горизонтальной коррекции для устройства 300 на оружии. Наконец, во время операции 1109 определенные программным обеспечением значения вертикальной и горизонтальной коррекции для устройства загружаются в прицел 300 через его порт USB.
[0091] Чтобы обеспечить надлежащие данные начальной скорости (MV) и баллистического коэффициента (ВС), которые точно подогнаны для оружия, требуются дополнительные опытные стрельбы на различных дистанциях. Эти операции объясняются со ссылкой на фиг. 20. Эти шаги те же самые как на фиг. 19 до шага 1208, во время операции 1209 предыдущие шаги повторяют для нескольких различных дистанций. Отклонения затем вводят в программное обеспечение во время операции 1210, чтобы произвести лучшее согласование данных и получить точные данные начальной скорости и баллистического коэффициента для конкретного патрона, используемого в оружии. Эти значения затем загружают в устройство 300 во время операции 1211.
[0092] Этот процесс, который описан со ссылкой на фиг. 20, должен затем повторяться для до 4 различных комбинаций заряда патрона/пули, так как значения MV и ВС будут различными для каждой комбинации. Как только этот процесс закончен, устройство 300 "научится" точной начальной скорости и баллистическим коэффициентам, необходимым для точной работы устройства 300 наведения. Чтобы выполнить точные вычисления коррекции на снос ветром, мы должны иметь значения дальности, наклона, MV, ВС и плотности воздуха. Дальности вручную устанавливается посредством наклона устройства 300 и оружия, например, больше 10 градусов, пока изображение цели должным образом не заполнит круг изображения на дисплее. Оружие затем возвращается к положению наклона менее 10 градусов, возможно, вертикальному, если во время стрельбы нет никакого бокового ветра. Если есть боковой ветер, стрелок просто соответственно наклоняет и заново прицеливается согласно перекрестию 201 и символу 203 коррекции на снос ветром на отображаемом изображении и производит выстрел. Как температура, так и атмосферное давление являются критическими для точного определения плотности воздуха.
[0093] Важно заметить, что, когда модуль 308 управления/дисплея установлен в корпус 301, значения температуры и давления могут больше не отражать точно условия окружающей среды. Следовательно, модуль управления/дисплея не должен быть установлен до прибытия на место стрельбы, или по меньшей мере временно удален при достижении места стрельбы, чтобы могли быть отражены надлежащие температуры и давления. После достижения места стрельбы пользователь может удалить и вновь установить батареи 306, чтобы сбросить и перезапустить модуль 308 управления/дисплея, таким образом заставляя измерить и сохранить значения давления и температуры перед тем, как модуль управления/дисплея 308 будет снова установлен в корпус 301. Благодаря контактам 322, когда модуль управления/дисплея полностью установлен, как датчик 303 и его микропроцессор, так и микропроцессор 304, обнаруживает, что модуль 319 камеры присоединен, и поэтому знает, что необходимо представлять телевизионное изображение, когда крышка линзы удалена.
[0094] Во время эксплуатации пользователь устройства 100 или 300 просто наводит оружие на цель, наклоняет оружие больше 10 градусов против часовой стрелки, чтобы визуально увеличить изображение цели, затем, когда соответствующим образом устанавливается размер на дисплее, возвращает оружие к вертикали, наклоняет оружие немного влево или вправо, в зависимости от воспринимаемого бокового ветра, и производит выстрел. Дальность корректируется автоматически микропроцессором, сдвигающим отображаемое изображение вверх или вниз соответственно понижению траектории пули. Перекрестие остается находящимся в центре, и автоматически обеспечивается коррекция по дальности. Коррекция на снос ветром также автоматически выполняется стрелком, наклоняющим устройство на угол менее 10 градусов в соответствии с оценкой бокового ветра и наводящим перекрестие прямо на цель. Этот наклон заставляет отображаемое изображение сдвигаться вправо или влево, так, что правильная точка наведения остается помещенной в центр перекрестия. Коррекция на снос ветром показывается индикатором 203 на дисплее изображения, показанном на фиг. 2.
[0095] Таким образом, показана и описана уникальная конструкция и концепция цифрового прицела. В то время как данное описание направлено на конкретные формы осуществления изобретения, понятно, что специалисты в данной области техники могут предложить модификации и/или изменения конкретных форм осуществления изобретения, показанных и описанных здесь. Любые такие модификации или изменения предполагаются быть включенными в данный документ. Разумеется, что описание в данном документе предназначено быть только иллюстративным, и не предполагает ограничения изобретения. Напротив, объем изобретения, описанного здесь, ограничен только прилагаемой формулой изобретения.
[0096] В то время как здесь было описано то, что следует считать приводимыми в качестве примера и предпочтительными формами осуществления данной технологии, другие изменения технологии станут очевидными специалистам из приведенных здесь идей. Конкретные способы работы и изготовления и конфигураций, раскрытые здесь, являются по своему характеру примерами и не должны рассматриваться как ограничения. Поэтому прилагаемая формула изобретения охватывает все такие изменения, попадающие в пределы сущности и объема технологии. Соответственно, патент на изобретение защищает технологию, которая определяется в нижеприведенной формуле изобретения, с учетом всех эквивалентов.
Изобретение относится к области стрелкового вооружения с оптическими способами автоматического определения исходных данных для открытия огня. При осуществлении визирования цели определяют начальное состояние оптического устройства, заключающееся в определении взаимосвязанных между собой размеров дальномерного элемента и дальности до него. Производят прием баллистической информации и прием изображения от датчика изображения. Отображают по меньшей мере часть изображения на дисплее. Производят наложение дальномерного элемента на отображаемую часть изображения. Осуществляют прием первых входных данных масштабирования для установки первого значения масштабирования. Первое значение масштабирования соотносят с первым расстоянием от оптического устройства. Определяют первое положение пули на основании первого расстояния и баллистической информации. Также отображают представляющую интерес область на основании значения масштабирования. При этом представляющая интерес область соответствует по меньшей мере частично траектории пули. Также предложено устройство для визирования цели, содержащее корпус, дисплей, датчик изображения и контроллер, сконфигурированный для управления устройством в режиме масштабирования по умолчанию или в режиме баллистического масштабирования. В режиме масштабирования по умолчанию увеличение уровня масштабирования изменяет поле зрения вдоль оптического пути от устройства до цели, а в режиме баллистического масштабирования увеличение уровня масштабирования изменяет поле зрения вдоль баллистической траектории от устройства. Обеспечивается полностью цифровое, оставляющее руки свободными решение задачи точного нацеливания оружия с дальней дистанции, возможность ввода всей необходимой информации для осуществления выстрела с дальней дистанции, не отрывая свои руки от оружия, просто наклоняя оружие из стороны в сторону. 4 н. и 15 з.п. ф-лы, 23 ил.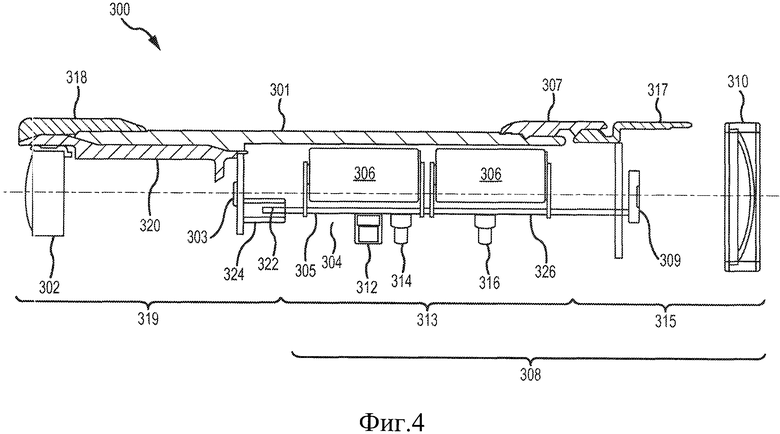
1. Способ визирования цели, включающий:
прием начального состояния оптического устройства, причем начальное состояние включает размер дальномерного элемента и дальность, связанную с этим размером;
прием баллистической информации;
прием изображения от датчика изображения;
отображение по меньшей мере части изображения на дисплее;
наложение дальномерного элемента на отображаемую часть изображения;
прием первых входных данных масштабирования для установки первого значения масштабирования, причем первое значение масштабирования соответствует первому расстоянию от оптического устройства; и
определение первого положения пули на основании первого расстояния и баллистической информации.
2. Способ по п. 1, дополнительно включающий отображение первой представляющей интерес области, основанное по меньшей мере частично на первом положении пули и первом значении масштабирования.
3. Способ по п. 2, дополнительно включающий отображение первого символа, соответствующего первому положению пули.
4. Способ по п. 1, дополнительно включающий:
прием входных данных максимального масштабирования для установки максимального значения масштабирования, причем максимальное значение масштабирования определено представляющей интерес областью датчика изображения и отображаемой представляющей интерес областью;
отображение максимально увеличенного изображения, связанного с максимальным значением масштабирования;
прием вторых входных данных масштабирования для установки второго значения масштабирования, причем второе значение масштабирования соответствует второму расстоянию от оптического устройства;
вычисление размера отрегулированного дальномерного элемента;
наложение отрегулированного дальномерного элемента на отображаемое максимально увеличенное изображение;
определение второго положения пули на основании второго расстояния и баллистической информации; и
отображение второй представляющей интерес области, основанное по меньшей мере частично на втором положении пули и втором значении масштабирования.
5. Способ по п. 4, дополнительно включающий отображение второго символа, соответствующего второму положению пули.
6. Способ по п. 3, в котором первый символ включает по меньшей мере одно из точки попадания на цели и направляющего символа.
7. Способ по п. 1, в котором первая операция определения положения пули основана по меньшей мере частично на входных данных сноса ветром.
8. Способ по п. 1, в котором первая операция определения положения пули основана по меньшей мере частично на входных данных информации о пуле, входных данных температуры окружающей среды, входных данных наклона, входных данных крена, входных данных скорости на выходе из ствола и входных данных атмосферного давления.
9. Способ по п. 1, в котором датчик изображения выполнен в виде камеры.
10. Способ визирования цели, включающий:
прием баллистической информации;
прием изображения от датчика изображения;
прием значения масштабирования;
вычисление траектории пули, основанное по меньшей мере частично на баллистической информации; и
отображение представляющей интерес области на основании значения масштабирования, причем представляющая интерес область соответствует по меньшей мере частично траектории пули.
11. Способ по п. 10, дополнительно включающий определение дальности до цели.
12. Способ по п. 11, в котором операция определения включает:
отображение по меньшей мере части изображения на дисплее и наложение дальномерного элемента на эту часть изображения.
13. Способ по п. 10, дополнительно включающий:
прием входных данных масштабирования, причем входные данные масштабирования содержат обновленное значение масштабирования; и
отображение обновленной представляющей интерес области на основании обновленного значения масштабирования.
14. Способ визирования цели, включающий:
прием изображения от датчика изображения;
отображение по меньшей мере части принимаемого изображения, причем отображаемая часть содержит отображаемое поле зрения;
отображение дальномерного элемента с фиксированным размером в зависимости от отображаемого поля зрения;
прием входных данных размера цели;
прием входных данных масштабирования для установки значения масштабирования;
вычисление дальности до цели, основанное по меньшей мере частично на входных данных размера цели и значении масштабирования.
15. Способ по п. 14, в котором входные данные размера цели содержат входные данные размера цели, заданные по умолчанию.
16. Способ по п. 14, в котором прием входных данных размера цели включает прием входных данных размера цели из запоминающего устройства.
17. Способ по п. 14, в котором входные данные размера цели выбирают из множества заранее заданных размеров цели.
18. Устройство для визирования цели, содержащее:
корпус;
дисплей;
датчик изображения; и
контроллер, сконфигурированный для управления устройством по выбору в режиме масштабирования по умолчанию и в режиме баллистического масштабирования, причем в режиме масштабирования по умолчанию увеличение уровня масштабирования изменяет поле зрения вдоль оптического пути от устройства до цели, а в режиме баллистического масштабирования увеличение уровня масштабирования изменяет поле зрения вдоль баллистической траектории от устройства.
19. Устройство по п. 18, в котором в режиме масштабирования по умолчанию символ, связанный с точкой попадания пули, отображается на дисплее, причем положение символа на дисплее изменяется на основании уровня масштабирования.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| DE 102011018947 A1, 31.10.2012 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

