ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка испрашивает приоритет по предварительной заявке U.S. №61/776,600, поданной 11 марта 2013 г., полное раскрытие которой включено в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002]Настоящее изобретение в целом касается измерения износа ремня, а более конкретно, использования изображений для идентификации характеристик износа ремня и прогнозирования его срока службы.
УРОВЕНЬ ТЕХНИКИ
[0003] Поликлиновые приводные ремни становятся все более прочными благодаря использованию материала этилен-пропилен-диеновый мономер (EPDM). В результате, исторически надежный показатель износа ремня, растрескивание, происходит реже, хотя ремни продолжают изнашиваться со временем. Одной из существующих проблем, связанных с применением этих современных материалов, является то, что определение состояния износа, предшествующего выходу из строя, сложно поддается количественному определению. Другими словами, поликлиновые приводные ремни, изготовленные из EPDM материалов, обычно поддаются только диагностике в качестве чрезмерно изношенных после полного выхода ремня из строя.
[0004] Последние достижения, касающиеся вышеупомянутой проблемы, требуют физического инструмента, который контактирует с измеряемым ремнем. Примеры таких инструментов описаны в патенте США №7946047 и патенте США №2010/0307221 автор обоих Смит и др., каждый из которых включен здесь в качестве ссылки в полном объеме. Эти решения основываются на физическом контакте измерительного инструмента и измеряемого ремня.
[0005] Было бы полезным разработать решение по измерению ремня, которое не основано на физическом контакте между инструментом и измеряемым ремнем, и которое может быстро и эффективно идентифицировать износ ремня. Дополнительные преимущества были бы реализованы, если бы такая система снизила нагрузку оператора системы по обработке изображений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Один из технических приемов бесконтактного измерения износа ремня описан в совместно рассматриваемой заявке заявителей, Заявка №13/226266, поданная 6 сентября 2011г., озаглавленной MEASUREMENT OF BELT WEAR THROUGH EDGE DETECTION OF A RASTER IMAGE, которая включена в настоящее описание в качестве ссылки в полном объеме.
[0007] Способ определения ориентации поликлинового ремня, изображенного на цифровой фотографии с целью коррекции поворота перед анализом степени износа ребра. Посредством выполнении манипуляций с цифровой фильтрацией гаммы, яркости, контраста, оттенков, цветовых каналов и другой информации фотографий, программное обеспечение будет идентифицировать параллельные, широкоформатные, четырехугольные зоны цифровых данных, которые будут признаны как представляющие продольные оси ребер ремня. Результаты этого анализа будут использоваться для определения ориентации изображения ремня в области фотографии, и установления перпендикулярной оси для использования в последующих анализах.
[0008] Дополнительно, способ компенсации неравномерного освещения в цифровой фотографии поликлинового ремня, с целью точной идентификации ориентации и/или числа ребер ремня перед анализом степени износа ребра. Посредством выполнения манипуляций с цифровой фильтрацией гаммы, яркости, контраста, оттенков, цветовых каналов и другой информации, программное обеспечение будет нормализовывать уровни контрастности в различных областях фотографии так, чтобы разница в резкости краев не привела к неправильной интерпретации данных программным обеспечением.
[0009] Последовательность работы:
[0010] Настоящее изобретение решает вопрос предшествующего уровня техники определения краев ремня и анализа перекошенного или не параллельного профиля ребра для улучшения пользовательского интерфейса посредством обработки диапазона пикселей (разрешения) изображения перед началом анализа, где этот этап обуславливает размер изображения, который является подходящим для всех изображений, полученных с любых типов смартфонов или фокусных расстояний захвата изображения.
[0011] Этап 1 алгоритма: Уменьшить разрешение изображения, например на 1/10ю и измерить углы ребра ремня, дополнительно обрезать края ремня, как определены
[0012] Этап 2 алгоритма: Вернуться к полному разрешению изображения и определить края ребра как описано ниже.
[0013] Определить ориентацию
[0014] Наложить маску на ремень, обрезать, удалив зоны высокого контраста, дополнительно проанализировать порог вариаций размеров пикселей (окрестностей) или по отдельности проанализировать пороги окрестностей пикселя
[0015] Использование адаптивного порога Open CV Library или другой библиотеки с эквивалентной функциональностью:
[0016] Подтвердить правильный размер окрестности пикселя, чтобы определить число ребер
[0017] - Продолжить анализ с выбором различных зон пикселей, таких как 5, 10, 100 или окрестностей пикселей дополнительного размера
[0018] – Пример одного процесса или цикла анализа для определения черная или белая– посмотрите на ближайшую окрестность из 35 пикселей для анализа с адаптивным порогом и проанализируйте, находится ли она в пределах допуска многоугольника, предпочтительно многоугольника с 4, 5, или 6 вершинами
[0019] - Продолжить цикл анализа диапазона серых цветов, чтобы определить черную или белую области изображения контуров, где изображение имеет несколько контуров
[0020] - Обработать контуры путем вписывания многоугольника в пиксельных областях
[0021] Обработать отфильтрованные области площадью более, чем 1/50ая площади изображения квадрата пикселей или величиной подобного размера, чтобы устранить ложные области, не имеющие ребер, это также и дополнительный способ обработки ошибок многоугольника (допуска), основанного на размере пикселя изображения.
[0022] Изображение ориентации ремня определяется расположением в декартовой системе координат самых длинных краев многоугольника от главных углов обнаруженных многоугольников
[0023] Выше описанное изобретение представляет собой изображение профиля ремня, которое обрезается, поворачивается и представляется для алгоритмов известного уровня техники: Measurement of Belt Wear Through Edge Detection of a Raster Image
[0024] - Этап Один Скриншот - изображение для идентификации краев ремня [См. Фиг.1]
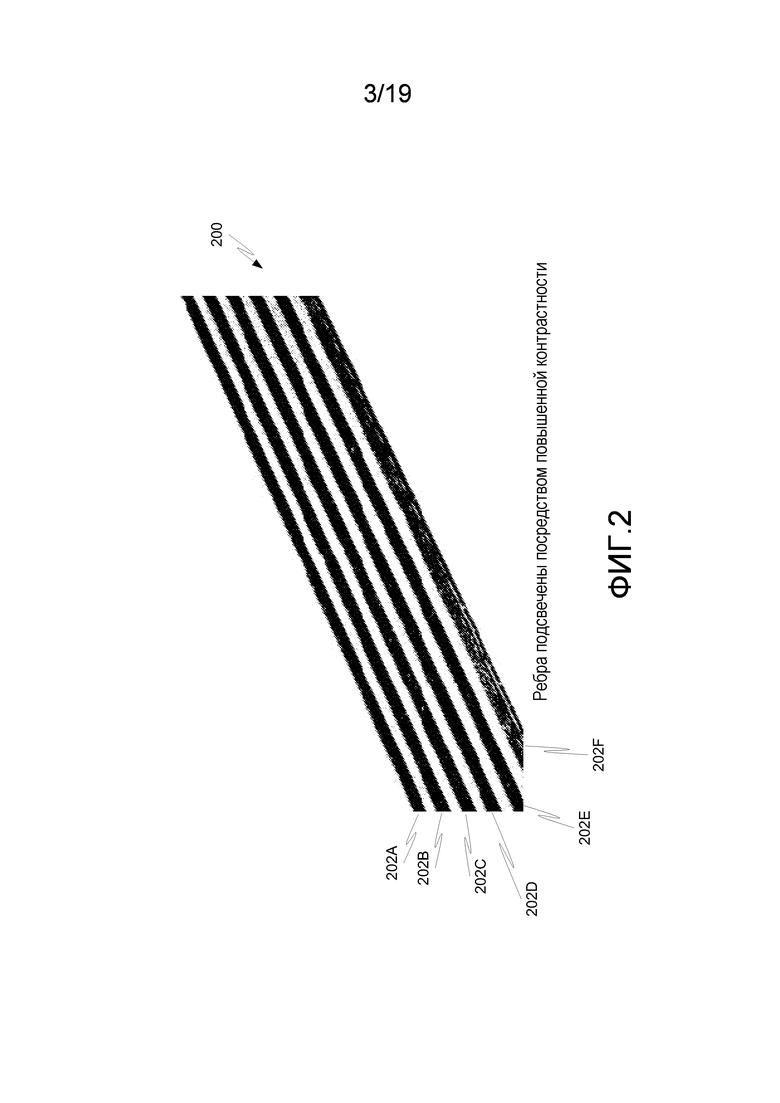
[0025] - Этап Два Скриншот - изображение ребер ремня [См. Фиг.2]
[0026] - Выборка кода изобретения
[0027] [См. Фиг.3]
[0028] Один из способов для достижения этого использует серию манипуляций, которые будут последовательно увеличивать контраст между смежными областями низкого контраста в плохо освещенных зонах фотографии до тех пор, пока она не станут одинаковыми по контрасту с хорошо освещенными областями фотографии. Эти манипуляции должны иметь возможность использовать всего лишь одну точку данных различия в одном или во всех каналах данных цифровой фотографии, изменяя переменные, такие как радиус зоны смежных данных от заданного пикселя для использования при анализе, степень примененного добавленного контраста, и порог различия который определит, будут ли применено преобразование к данным. Этот процесс похож на процесс, используемый в цифровой фотографии и печати и известный как метод нечеткой маски.
Кроме того, способ определения числа ребер и/или канавок на ремне, изображенном на цифровой фотографии с целью информирования анализирующего программного обеспечения до проведения анализа степени износа ремня. Используя данные, представляющие параллельные четырехугольные зоны фотографии, в сочетании с данными, представляющими маркированную вершину ребра, будет произведено сравнение с целью определения, возвращают ли эти два набора данных согласованное значение, представляющее собой число ребер, содержащихся на ремне, представленном на фотографии. Если эти два набора данных не согласуются, то метки проставленные пользователем будут использованы для определения числа ребер на ремне. Сбор и анализ этих двух наборов данных будет представлять способ определения точности методики и позволит в дальнейшем оптимизировать программное обеспечение.
[0029] В совокупности эти улучшения устранят необходимость для пользователя:
[0030] 1. Ориентировать фотографическое устройство каким-либо конкретным образом
[0031] 2. Масштабировать, поворачивать, центрировать или производить иные манипуляции с изображением после захвата фотографии
[0032] 3. Вручную вводить количество ребер ремня перед анализом
[0033] 4. Устраняется необходимость маркировать ремень
[0034] Качество полученного изображения тестируемого объекта может являться фактором возможности или точности проведения бесконтактного анализа тестируемого объекта, такого как ремень. Многие дефекты изображения могут быть полностью или частично сведены на нет. Человеческий глаз может распознать многие дефекты, связанные с изображением ремня. Тем не менее, в соответствии с вариантами осуществления и формулой изобретения, машинная коррекция изображения обеспечивает средство устранения дефектов изображения ремня и также может повысить скорость и точность изображения и его анализа.
[0035] Преимущества бесконтактного анализа, такого как измерение износа ремня посредством анализа изображения ремня, могут быть реализованы путем выполнения описанных здесь вариантов осуществления. Одно из преимуществ реализуется путем предоставления приложения для измерения ремня, включающего в себя автоматическую коррекцию некоторых дефектов захвата изображения, например, поворот ремня относительно системы координат фотографирующего устройства. С поворотом изображения ремня в ту или другую сторону таким, что изображение ремня имеет определенную ориентацию относительно заранее определенной оси кадра изображения, скорость и точность анализа изображения повышается. Таким образом, в одном варианте осуществления обеспечивается машинный поворот изображения ремня. Дополнительные варианты осуществления иллюстрируют возможность дальнейшего улучшения изображения посредством выполнения таких операций как обрезка, обнаружение края и/или обнаружение ребра ремня.
[0036] Термин "автоматический" и его вариации, как он используется здесь, относится к любому процессу или операции выполняемой, без существенного вмешательства человека при выполнении процесса или операции. Тем не менее, процесс или операция может быть автоматической, даже если при выполнении процесса или операции имеет место существенное или несущественное вмешательство человека, если вмешательство имеет место до выполнения процесса или операции. Вмешательство человека считается существенным, если вмешательство влияет на то, как будет выполнен процесс или операция. Вмешательство человека, разрешающее выполнение процесса или операции не считается «существенным».
[0037] Термин "машиночитаемый носитель" как он используется здесь, относится к любому материальному носителю, который участвует в предоставлении инструкций процессору для их выполнения. Такой носитель может принимать различные формы, включая, но, не ограничиваясь, энергонезависимые носители, энергозависимые носители, средства передачи. Энергонезависимые носители включают в себя, например, NVRAM, или магнитные или оптические диски. Энергозависимые носители включают в себя динамическую память, такую как оперативная память. Обычные формы машиночитаемых носителей включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту или любой другой магнитный носитель, магнито-оптический носитель, компакт-диск, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель с узором из отверстий, ОЗУ, ПЗУ и СППЗУ, СППЗУ с групповой перезаписью, твердотелый носитель, как карта памяти, любой другой чип памяти или картридж, или любой другой носитель, с которого может считывать компьютер. Когда машиночитаемый носитель сконфигурирован в виде базы данных, следует понимать, что база данных может быть любого типа, такого как реляционный, иерархический, объектно-ориентированный и/или тому подобное. Соответственно, подразумевается, что раскрытие изобретения включает в себя материальный носитель информации и общепризнанные эквиваленты известного уровня техники и носители следующего поколения, на которых хранятся программные реализации настоящего изобретения.
[0038] Термины «идентифицировать», «определять», «вычислять», «рассчитывать» и их вариации, используемые здесь, взаимозаменяемы, включают любой тип методологии, процесса, математической операции или метода.
[0039] Термин «модуль» как он используется здесь, относится к любым известным или позднее разработанным аппаратным средствам, программному и микропрограммному обеспечению, искусственному интеллекту или комбинации аппаратных средств и программного обеспечения, которое способно выполнять функции, связанные с этим элементом. Кроме того, в то время, как раскрытие изобретения описано в терминах примерного варианта осуществления, следует понимать, что отдельные аспекты раскрытия изобретения могут быть заявлены отдельно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0040] Варианты осуществления описаны в сочетании с прилагаемыми чертежами:
[0041] Фиг.1 представляет собой первое изображение ремня в соответствии с вариантом осуществления настоящего изобретения;
[0042] Фиг.1B представляет собой изображение после адаптивного определения порога и полного обнаружения ремня;
[0043] Фиг.2 представляет собой изображение повышенной контрастности первого изображения ремня в соответствии с вариантами осуществления изобретения;
[0044] Фиг.3 иллюстрирует идентифицированные ребра ремня, расположенные вдоль всей оси ремня в соответствии с вариантами осуществления настоящего изобретения;
[0045] Фиг.4 представляет собой блок-схему, иллюстрирующую систему измерения в соответствии с вариантами осуществления настоящего изобретения;
[0046] Фиг.5 представляет собой схему последовательности операций, иллюстрирующую работу пользователя с измерительной системой в соответствии с вариантами осуществления настоящего изобретения;
[0047] Фиг.6 представляет собой схему последовательности операций, иллюстрирующую один способ обработки изображения в соответствии с вариантами осуществления настоящего изобретения;
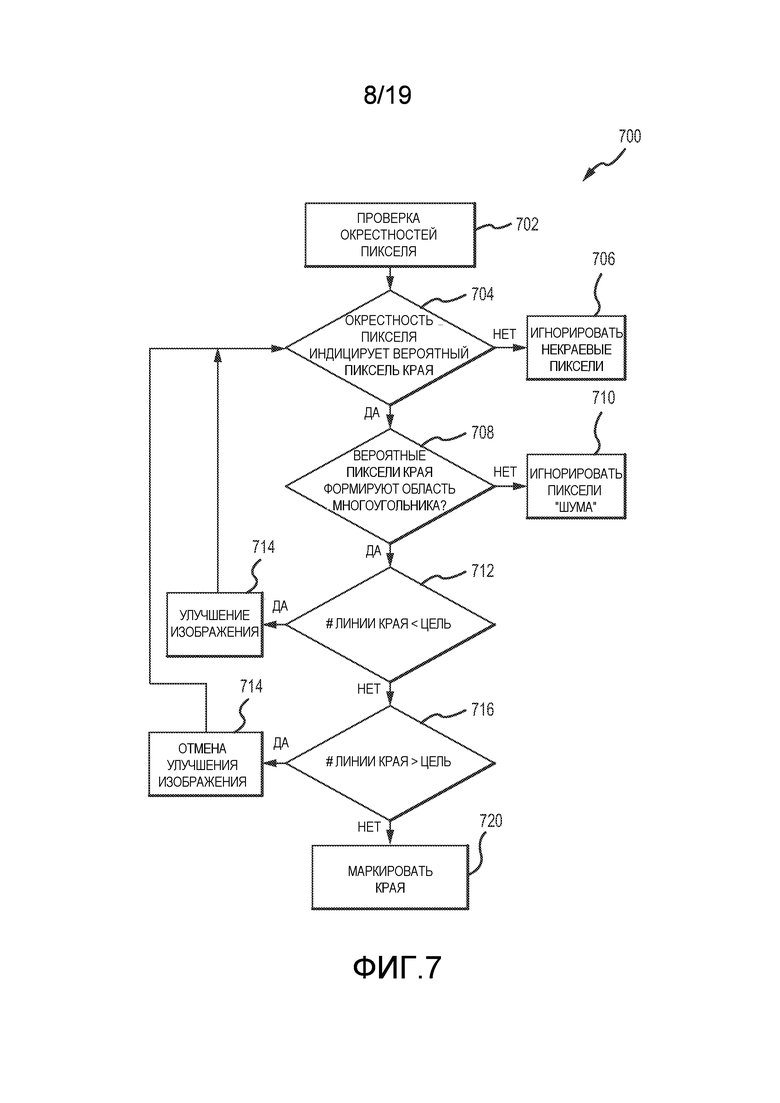
[0048] Фиг.7 представляет собой схему последовательности операций, иллюстрирующую способ обнаружения края в соответствии с вариантами осуществления настоящего изобретения;
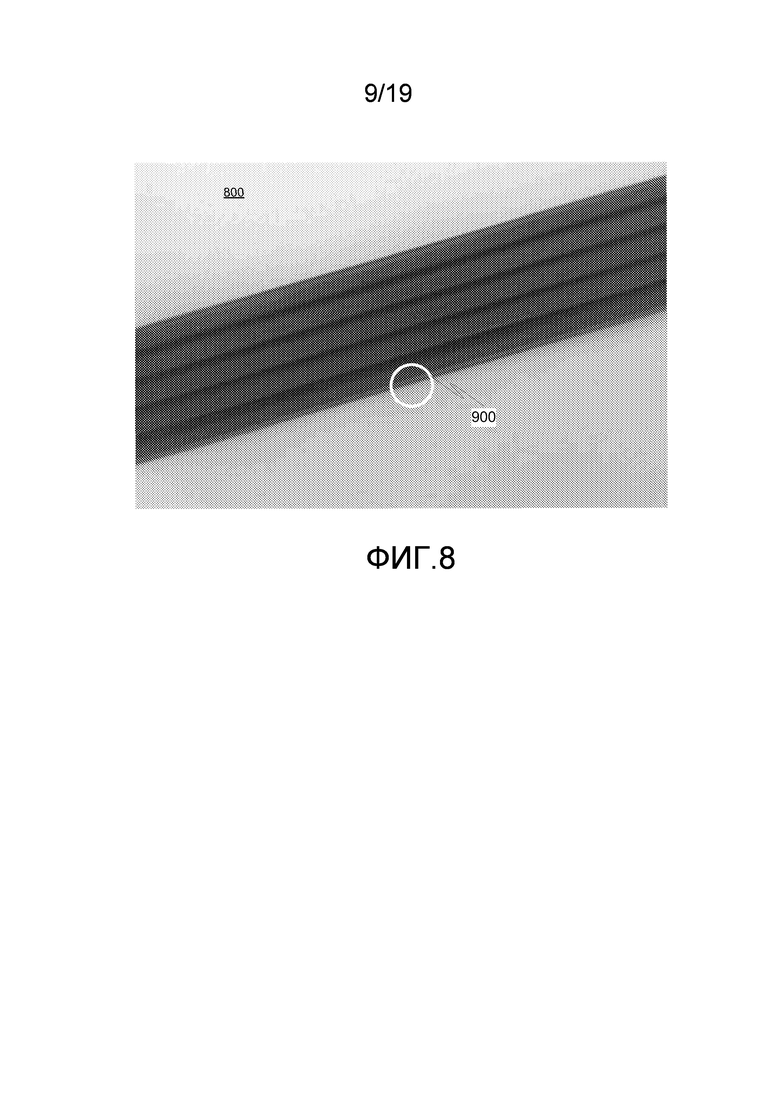
[0049] Фиг.8 представляет собой первое изображение ремня в соответствии с вариантами осуществления настоящего изобретения;
[0050] Фиг.9 иллюстрирует бинарное изображение части первого изображения ремня в соответствии с вариантами осуществления настоящего изобретения;
[0051] Фиг.10 иллюстрирует применение разграничительной линии края в соответствии с вариантами осуществления настоящего изобретения;
[0052] Фиг.11 иллюстрирует повернутое изображение первого изображения ремня с повышенной контрастностью, чтобы облегчить идентификацию числа ребер в соответствии с вариантами осуществления настоящего изобретения;
[0053] Фиг.12 иллюстрирует часть первого изображения ремня с линиями ребер, линиями краев и предпочтительной осью в соответствии с вариантами осуществления настоящего изобретения;
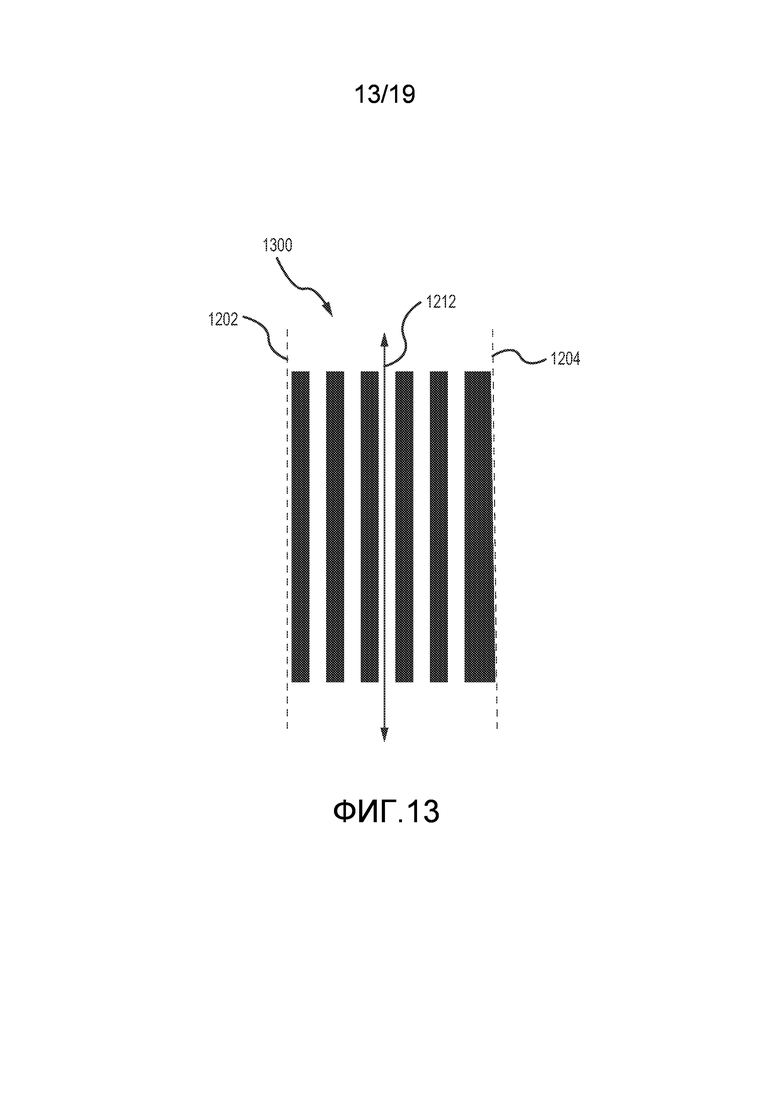
[0054] Фиг.13 иллюстрирует обработанное изображение ремня в соответствии с вариантами осуществления настоящего изобретения;
[0055] Фиг.14 иллюстрирует изображение ремня и обрезаемый буфер в соответствии с вариантами осуществления настоящего изобретения;
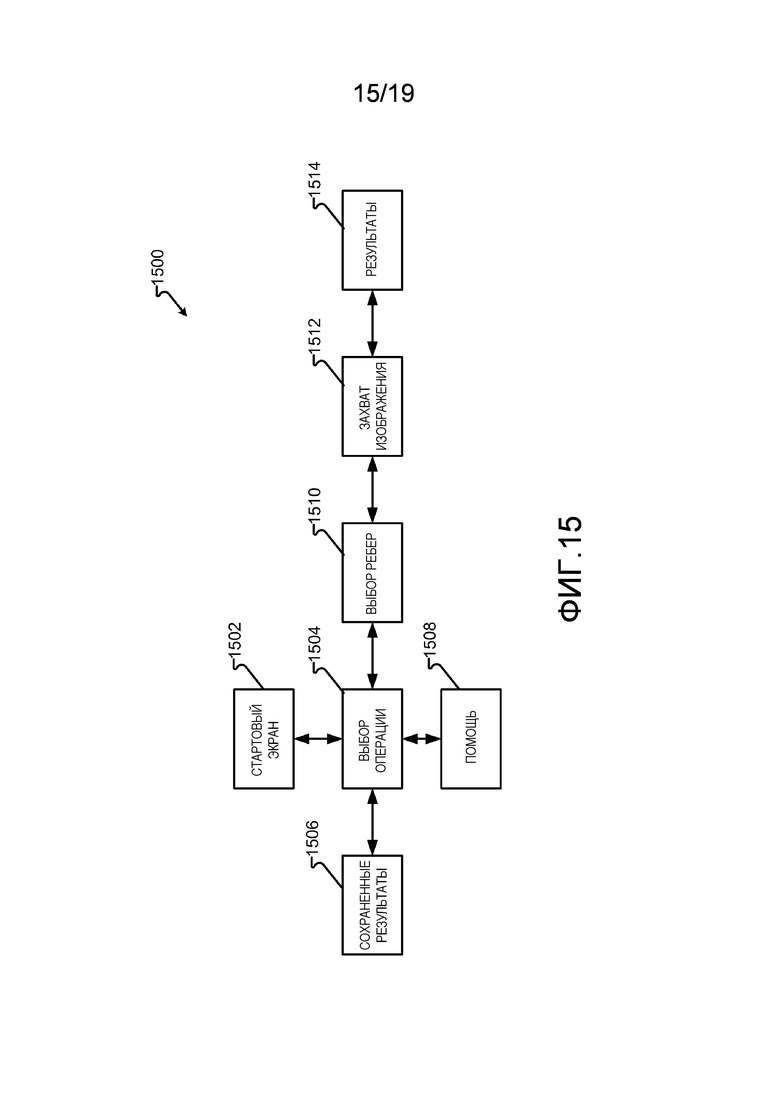
[0056] Фиг.15 иллюстрирует последовательность операций в соответствии с вариантами осуществления настоящего изобретения; и
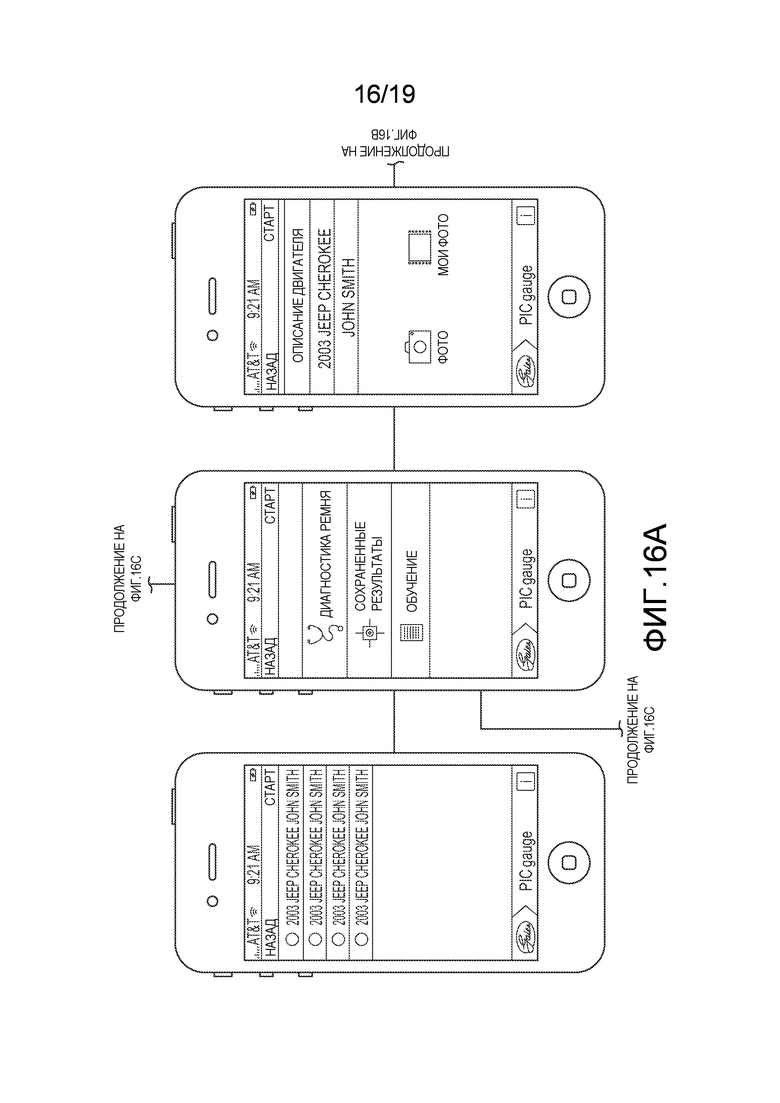
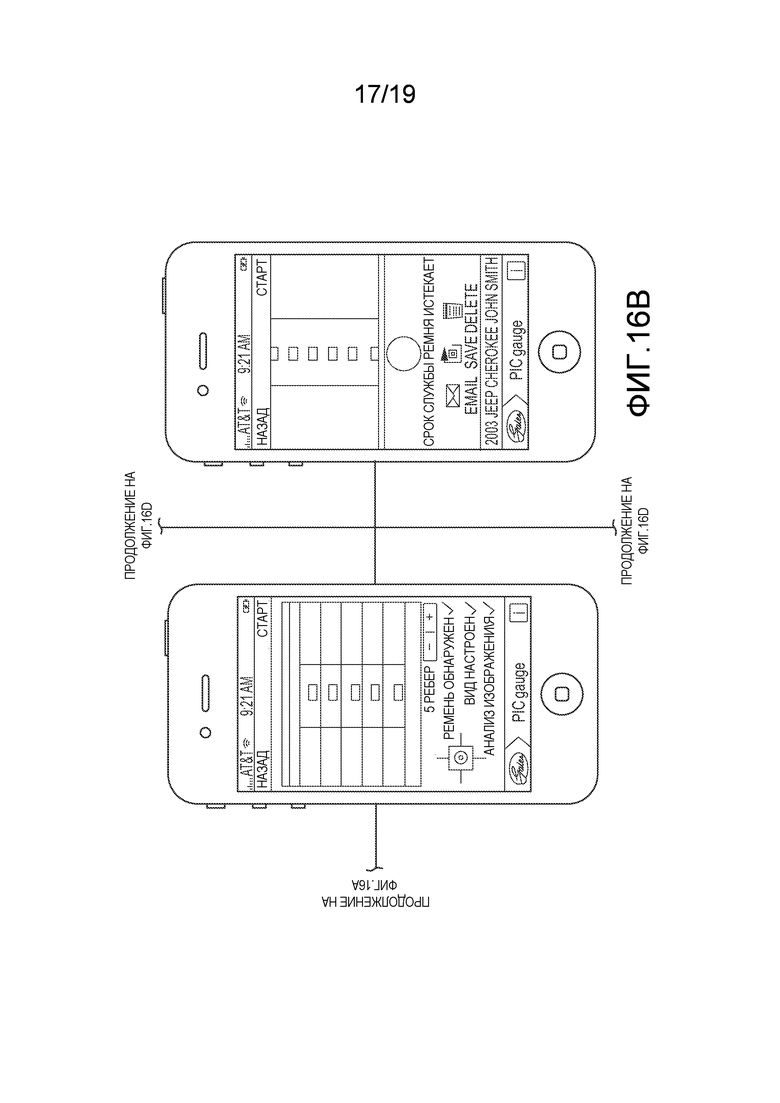
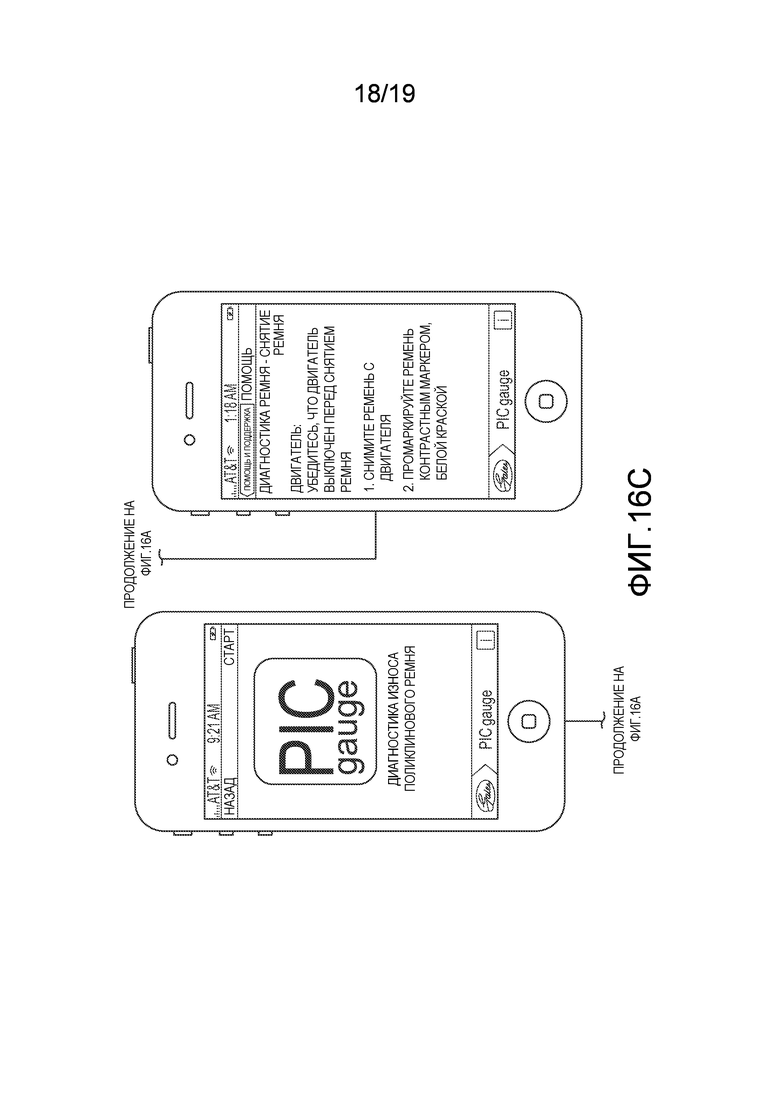
[0057] Фиг.16A-16D иллюстрируют процесс как он представлен пользователю в соответствии с вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0058] Одно из желаемых применений вариантов осуществления описанных здесь, направлено на обработку изображения ремня, а более конкретно, изображения части ремня для использования модулем анализа ремня, приложением или двигателем. Тем не менее, специалистам в данной области техники будет понятно, что в дополнение к ремню, из изложенного здесь можно извлечь пользу и для других тестируемых объектов, включая, но, не ограничиваясь этим, шестерни, шкивы, поддерживающие ролики, валы, подшипники, лопасти и поддерживающие части.
[0059] Обратимся теперь Фиг.1, являющейся первым изображением ремня 100. Идентифицированы внешние края 102 и 104.
[0060] Фиг.lB является первым изображением 100 ремня после адаптивного порогового алгоритма. Фиг.lB иллюстрирует второе изображение 206 с бинарными и обратными значениями. Показаны первый и второй края ремня 102B и 104B, которые формируют границу между изображением 110 ремня и фоном 108.
[0061] Фиг.2 является изображением 200 с повышенной контрастностью первого изображения 100 ремня. В показанном варианте осуществления идентифицированы 6 ребер (202A-202F). Дальнейшее рассмотрение идентификации ребра приведено ниже. Обращаясь снова к показанному варианту осуществления, ребра 202A, 202B, 202C, 202D и 202F образуют темные области, которые в пределах допуска формируют многоугольники с 4 вершинами. Ребро 202E формирует другую вершину из-за усечения изображения 200, и таким образом, формирует многоугольник с 5 вершинами. В другом варианте осуществления (не показано) ребро может формировать многоугольник с 6 вершинами, например, когда одно ребро 200 изображается от одного угла к диагонально противоположному углу и, таким образом, усекается четырьмя сторонами прямоугольного изображения, такого как изображение 200.
[0062] Фиг.3 иллюстрирует идентифицированный ремень 300 с числом идентифицированных ребер 302 (для ясности, не все ребра идентифицированы на изображении). Ребра 302 идентифицируются вдоль всей оси ремня 300. В другом варианте осуществления, идентификация ребер 302 происходит вдоль части оси, такой как зона, по существу расположенная совместно с метками 304.
[0063] Обращаясь к Фиг.4, измерительная система 400 будет описана в соответствии с вариантами осуществления настоящего изобретения. Измерительная система 400 может содержать один или несколько компонентов для анализа тестируемого объекта 402 для классификации тестируемого объекта 402 как хорошего (т.е. не требующего замены) или плохого (т.е. требующего замены). Могут быть сделаны и другие определения касательно тестируемого объекта 402 без отхода от сущности и объема настоящего изобретения; например, тестируемый объект 402 может быть идентифицирован как аварийный (т.е. требующий в скором времени замены) или ненормальный (т.е. не следующий ожидаемому рисунку износа и таким образом требующий дальнейшего исследования и/или замены).
[0064] В некоторых вариантах осуществления измерительная система 400 содержит устройство захвата изображения 404, процессор изображений 406, модуль анализа 408 и пользовательский интерфейс 410 для использования пользователем 412.
[0065] В качестве неограничивающего примера тестируемый объект 402 может содержать ремень, в частности поликлиновой ремень, выполненный из EPDM материалов. Ремень может находиться в рабочем положении (т.е. установлен на двигателе или другом устройстве, которое использует ремень) или он может находиться в нерабочем положении (т.е. быть снятым с двигателя или другого устройства, которое использует ремень). Устройство 404 захвата изображения может иметь возможность захвата одного или более неподвижных изображений. Альтернативно или дополнительно устройство 404 захвата изображения может быть способно захватывать видео изображение (т.е. последовательность числа кадров изображения, которая может быть синхронизирована или не синхронизирована с аудио входом). Изображение(я), захваченное(ые) устройством 404 захвата изображения может содержать цвет (т.е. пиксельное изображение, где каждый пиксель содержит красное, зеленое и синее (RGB) пиксельное значение), градацию серого (т.е. пиксельное изображение, где каждый пиксель содержит пиксельное значение градации серого от 0 до заранее определенного числа такого как 255), черно-белое (т.е. пиксельное изображение, где каждый пиксель содержит бинарное значение, соответствующее или черному или белому), инфракрасный (т.е. пиксельное изображение, где каждый пиксель содержит инфракрасное пиксельное значение), ультрафиолетовый (т.е пиксельное изображение, где каждый пиксель содержит ультрафиолетовое значение), или любой другой известный тип изображения. Неограничивающим примером устройства 404 захвата изображения является камера (фото или видео), которая является либо отдельным устройством, либо встроена в пользовательское устройство, такое как смартфон.
[0066] Процессор 406 изображений определяет необходимы ли какие-либо автоматические корректировки для улучшения точности изображения тестируемого объекта 402, полученного с помощью устройства 404 захвата изображения. При определении необходимости применения автоматических корректировок, такие корректировки производятся процессором изображений 406. Если автоматические корректировки не применяются, то изображение становится доступным для модуля 408 анализа без автоматических корректировок. Если автоматические корректировки применяются, тогда изображение доступно для модуля 408 анализа после применения автоматических корректировок.
[0067] Модуль 408 анализа затем анализирует изображение тестируемого объекта 402 и передает результаты анализа пользователю 412 через пользовательский интерфейс 410.
[0068] Процессор 406 изображений может определить, что изображение выходит за рамки корректировки, такое может произойти с изображением, которое недоэкспонировано или переэкспонировано, и может дополнительно уведомить пользователя, что изображение необходимо получить повторно. Уведомление о непригодном изображении может быть получено через пользовательский интерфейс 410 или другой пользовательский интерфейс.
[0069] В одном варианте осуществления, функционал обработки изображения, выполняемый процессором 406 изображений, выполняется над изображением предоставленным устройством 404 захвата изображения. Изображение становится доступным после того, как один компонент обеспечит нахождение изображения в общей памяти, доступной памяти или предоставит изображение с помощью линии связи или тому подобное. В некоторых вариантах осуществления, сигнал посылается от одного компонента второму компоненту, чтобы уведомить второй компонент о доступности изображения или о прекращении обработки первым компонентом.
[0070] Несмотря на то, что варианты осуществления, представленные здесь, в основном направлены на получение и изменение единичного изображения, дополнительные изображения могут быть созданы без отхода от объема настоящего изобретения. Варианты осуществления, где изображение передается от первого модуля на второй, могут быть выполнены путем копирования операций, причем оба и первый и второй модуль сохраняют копию изображения. Аналогично, варианты осуществления, где изображение изменяется, могут быть выполнены с копией изображения и оригиналом или предыдущее изображение остается неизмененным. Кроме того, изменения могут быть применены к копии изображения, файлу изменений или к логическому слою изображения так, что от изменений можно отказаться, и останется оригинальное изображение, или можно вернуться к изображению в неизмененном состоянии.
Обработка происходит с применением изменений к изображению или с копией изображения, содержащего изменения.
[0071] Устройство 404 захвата изображения, процессор 406 изображений, модуль 408 анализа и пользовательский интерфейс 410 проиллюстрированы здесь как дискретные компоненты. Измерительная система 400 может быть осуществлена в различных других конфигурациях. В одном варианте осуществления каждый компонент измерительной системы 400 может быть включен в пользовательское устройство, такое как сотовый телефон, смартфон, персональный компьютер (ПК), лэптоп, нетбук, планшет или похожее, или иметь доступ к общему пользовательскому интерфейсу, такому как пользовательский интерфейс 410. В таком варианте осуществления между компонентами предоставляется подключаемая линия связи, например проводной, беспроводной или оптический или магнитный съемный медиа интерфейс. В других вариантах осуществления, по крайней мере, два из устройства 404 захвата изображения, процессора 406 изображений, модуля 408 анализа и пользовательского интерфейса 410 размещены совместно в одном конструктивном решении или устройстве обработки, таком как специализированная интегральная схема (ASIC), карта обработки (например, PCI, PCie), универсальное интегрированное устройство или компьютерная платформа. Понятно, что с помощью цепи, PCB платы или других средств связи, коммуникационная шина может быть использована для связи физически интегрированных компонентов.
[0072] Фиг.5 представляет собой схему 500 последовательности операций, иллюстрирующую работу пользователя с измерительной системой, такой как измерительная система 400, в соответствии с вариантами осуществления настоящего изобретения. Пользователь 412 выполняет этап 502, тем самым инициируется приложение оценки ремня.
[0073] В одном варианте осуществления завершение этапа 502 инициации автоматически инициирует (т.е. подает питание или иначе делает доступными) электронные компоненты системы 400 (один или более пользовательский интерфейс 410, модуль 408 анализа, процессор 406 изображений и устройство , 404 захвата изображения). В вариантах осуществления, где некоторые электронные компоненты системы 400 не инициируются одновременно, или почти так, посредством этапа 502 могут быть инициированы для их использования. В других вариантах осуществления этап 502 сбрасывает приложение и в еще одном варианте осуществления этап 502 просто дает доступ к приложению.
[0074] Обработка продолжается с уведомлением пользователя, например с помощью пользовательского интерфейса 410, что приложение готово для получения изображения тестируемого объекта 402, такого как ремень. Пользователь выполняет этап 504 и получает изображение и ему автоматически представляют с результаты на этапе 506. В других вариантах осуществления, одно или более дополнительных сообщений могут быть представлены пользователю, например, сообщения об ошибке, инструкции для повторного получения изображения при выполнении этапа 504 еще раз, информационные сообщения, инструкции, примеры, индикаторы текущего состояния, опции для сохранения и/или печати результатов анализа или аналогичная информация, которая может улучшить работу пользователя.
[0075] Поскольку отсутствуют функциональные требования к промежуточным этапам, таким, которые выполняются процессором 406 изображений и/или модулем 408 анализа, то результаты или ход любого промежуточного этапа может быть представлен пользователю 412 в качестве опции. Опция может быть выбрана во время разработки приложения или выбора конфигурации, определяемой пользователем 412.
[0076] На Фиг.6 представлена схема 600 последовательности операций, иллюстрирующая один из вариантов осуществления этапов способа обработки изображения. Схема 600 последовательности операций может быть выполнена на одном или нескольких электронных устройствах, таких как измерительная система вариантов осуществления, приведенная на Фиг.4. На этапе 602 получают первоначальное изображение тестируемого объекта, такого как ремень. На этапе 606 идентифицируют края ремня. На этапе 604 находят изображение ремня. На этапе 608 определяют угол ремня относительно кадра изображения. На этапе 610 определяют, требуется ли разворот, если да, то обработку продолжают до этапа 612. Если нет, обработку продолжают до этапа 614. На этапе 612 разворачивают изображение, в результате чего изображение поворачивают по или против часовой стрелки в зависимости от обстоятельств, отрицательное значение угла определяют на этапе 608. На этапе 614 предоставляют изображение модулю изображений для анализа изображения ремня. Дополнительные этапы, не приведенные здесь, могут включать в себя отчеты или хранение результатов анализа для использования пользователем, таким как пользователь 412, чтобы просмотреть и принять соответствующие меры (т.е. заменить дефектный ремень или запланировать будущую повторную оценку ремня).
[0077] Этап 612 разворота может включать в себя применение алгоритма поворота к копии изображения или к оригинальному изображению, полученному на этапе 602. Этап 612 разворота может осуществлять генерирование информации разворота (т.е. точек, матрицы, уравнения или кода), используемой модулем 408 анализа. В таком варианте осуществления, модуль 408 анализа считывал бы оригинальное изображение с применением информации разворота, так что анализ проводился бы на оригинальном изображении, как если бы оно было развернуто.
[0078] В другом варианте осуществления, изображение обрезается (автоматически или вручную). Части изображения, которые выходят за идентифицированные края изображения ремня, могут рассматриваться как ненужные и отбрасываются. Изображение некоторых тестируемых объектов, таких как ремень, обычно не включает полностью ремень в один какой-либо кадр, поскольку изображение ремня проходит вдоль одной оси, например предпочтительной оси, и заканчивается на двух противоположных краях кадра. Варианты осуществления анализа тестируемого объекта, который не заканчивается на крае кадра (например, часть отрезанного ремня), может быть обрезано или обработано другим образом, так что конец изображения объекта становится краем кадра.
[0079] Этап 606 идентифицирует края ремня на изображении. Край может быть изображен как массив пикселей, которые формируют линию. Тем не менее, небольшие вариации расположения пикселей, где пиксели образуют кривую, число сегментов линий или другие менее идеальные линии могут рассматриваться как линия, если такая неравномерность определяется как находящаяся в рамках ожидаемого значения пикселей края ремня. В других вариантах осуществления этап 606 идентифицирует указания положения ремня, которыми может быть край, метка, ребро или другой признак ремня, способный указывать угловое положение ремня в кадре.
[0080] Этап 606 может содержать дополнительную обработку, такую как определение числа предполагаемых краевых линий и подтверждение или отрицание их положения в качестве краевой линии. Более конкретно, если на этапе 606 ожидается наличие двух краев, что можно было бы ожидать в случае с ремнем, но идентифицируется только одна линия в качестве предполагаемого края, то изображение может быть обработано еще раз и этап 606 повторен. Повторная обработка может включать в себя повышение или понижение качества изображения, и описана более детально со ссылкой на Фиг.7. Кроме того, может быть создан сигнал для указания пользователю, что изображение непригодно и требуется повтор этапа 602 для повторного получения.
[0081] В случае, если подтверждается наличие более чем двух предполагаемых краев, где дополнительные предполагаемые края похожи на ребра ремня, то внешние предполагаемые края могут быть идентифицированы в качестве краев без необходимости в повторной обработке изображения. При желании изображение может быть повторно обработано, например, путем увеличения контрастности или повышением разрешения и повтором этапа 606 для повторно обработанного изображения. Более детальное описание некоторых вариантов осуществления этапа 606 приведено со ссылкой на Фиг.7.
[0082] После того как края были идентифицированы, этап 608 определяет угол по крайне мере одного края кадра изображения. Края, определенные на этапе 606, могут образовывать угол с предпочтительной осью кадра изображения. Различные варианты осуществления рассматриваются для определения угла ремня относительно кадра изображения на этапе 608. Каждая из краевых линий, как описано в отношении этапа 606, является идеальной или не идеальной линией, но в пределах приемлемого диапазона кривизны или завершенности. Это может быть в том случае, когда каждая из двух краевых линий не параллельна другой по причине лежащего не в плоскости изображения, полученного на этапе 602. В одном варианте осуществления угол ремня определяется средним уклоном или углом из двух углов краевых линии. Альтернативно, одна краевая линия может быть выбрана в качестве указывающей угол ремня. Если две и более линий должны быть определяющими для указания угла ремня, то угол ремня может быть определен с помощью арифметической функции, такой как среднее арифметическое, мода или среднее двух или более линий. В другом альтернативном варианте угол ремня определяется одним или несколькими внутренними линий, такими как линии ребер ремня и, по выбору, включает одну или обе краевые линии.
[0083] Для многих тестируемых объектов, таких, как ремень, отображаемое указание угла ремня легко определяется путем определения краевых линий и, по выбору, числа линий ребер, параллельных краям. Также рассматривается и другое указание угла ремня. В другом варианте осуществления на этапе 606 идентифицируют отличительный признак ремня, указывающий ориентацию и на этапе 608 определяют угол ремня относительно кадра, используя указание ориентации. В одном варианте осуществления, на ремень добавляется неструктурный признак, например меловая метка, нить, штамп или другая граница. В другом варианте осуществления признак является структурным, таким как ребра или зубья. Если известно, что отображаемый признак не параллелен краю ремня, то на этапе 608 рассматривается известный угол при определении угла ремня относительно кадра изображения. Для иллюстрации варианта осуществления, рассматривается ремень с зубьями, где пики и впадины зубьев расположены под углом 90 градусов к ремню. В таком варианте осуществления, на этапе 606 идентифицируют число зубьев и на этапе 608 определяют угол ремня как 90 градусов от угла очерчивания зубьев.
[0084] Кадр полученного изображения считается периметром изображения или, соответствующей части изображения, согласно представленной удобочитаемой для человека или машиночитаемой форме. В обычных системах формирования изображения известных в данной области, прибор с зарядовой связью (CCD), или аналогичную матрицу формирования изображений используют для захвата изображений. Эти матрицы формирования изображений включают в себя матрицу светочувствительных пикселей обычно расположенных в формате прямоугольной матрицы. Отдельные пиксели могут быть чувствительны к одному цвету, например красному, синему и зеленому, черному и белому или оттенкам серого. Для целей данного изобретения у нас нет необходимости рассматривать первый одноцветный пиксель в качестве отличного от пикселей, захватывающих другой цвет того же изображения. Как известно на счет прямоугольников, прямоугольные матрицы формирования изображений имеют длинный и короткий размер или ось. Самое идеальное изображение ремня для анализа, это изображение, на котором ремень проходит вдоль самой длинной оси кадра, и ширина ремня находится в пределах кадра, так что оба края захвачены и параллельны самой длинной оси кадра изображения.
[0085] В основном предпочтительно выбирать самую длинную ось кадра в качестве предпочтительной оси. Тем не менее, в другом варианте осуществления, угол кадра определяют по отношению к предпочтительной ориентации кадра, которая может совпадать или не совпадать с длиной матрицы. В вариантах осуществления, использующих устройство 1204 захвата изображения с квадратной матрицей формирования изображения, более идеальное изображение ремня может быть параллельно любой перпендикулярной оси кадра. Может быть выбрана одна ось, например ось, ближайшая к параллельной изображению ремня. Тем не менее, модуль 1208 анализа может запросить или другим способом предпочесть конкретную ориентацию (например, вертикальную) и выбранную предпочтительную ось в соответствии с таким требованием или предпочтением. Аналогичным образом, устройство 1204 захвата изображения с круглым или неправильной формы кадром может иметь предпочтительную ось, выбранную исключительно в соответствии с требованиями или предпочтениями модуля 1208 анализа, или в соответствии с осью, ранее определенную другим образом.
[0086] Со ссылкой на Фиг.7, представлена схема 700 последовательности операций, которая иллюстрирует один из вариантов осуществления под-этапов, содержащих этап 608 определения края. Окрестности пикселей изучают на этапе 702. На этапе 704 определяют, указан ли край для предполагаемого пикселя. В одном упрощенном варианте осуществления, предполагаемый пиксель считается находящимся в пределах окрестности из 8 смежных пикселей, то есть, матрица из пикселей 3*3 с предполагаемым пикселем в центре. В одном примере на этапе 704 рассматривают пиксель как краевой предполагаемый пиксель, посредством определения всех шести пикселей в двух верхних рядах, которые содержат предполагаемый пиксель, и имели один общий признак, который не был общим с тремя пикселями нижнего ряда. Могут ли соседние пиксели быть менее явно очерчены, например все пиксели идентичны или почти идентичны предполагаемому пикселю или окрестность не имеет явно идентифицированного признака, чтобы определить очертания края, тогда пиксели могут считаться некраевыми пикселями на этапе 706.
[0087] Некоторые операции по обнаружению ошибок также могут быть включены. В одном варианте осуществления, число краевых пикселей может выходить за ожидаемый диапазон. Чтобы проиллюстрировать один из вариантов осуществления на примере; захваченное изображение ремня, как ожидается, имеет два набора краевых пикселей, соответствующих краям ремня. Идеальная линия, захваченная с помощью матрицы формирования изображения, и идущая параллельно предпочтительной оси и заканчивающаяся на границе кадра, содержала бы число пикселей, эквивалентное длине предпочтительной оси кадра, умноженной на ширину линии. Изображения объектов реального мира, даже по существу линейных, таких как ремень, вряд ли образуют линии с такими точными размерами, однако может предполагаться диапазон. В одном варианте осуществления, число предполагаемых краевых пикселей равно нулю и может вызвать состояние ошибки или осуществить переход к улучшению изображения.
[0088] После того как предполагаемый краевой пиксель был идентифицирован, на этапе 708 определяют, образуют ли предполагаемые краевые пиксели область многоугольника. Изображение со значительным числом предполагаемых краевых пикселей, которые не образуют область многоугольника, могут образовывать рисунок другой или более неопределенной геометрии. Это может быть признаком низкого качества изображения. В других случаях определенное число предполагаемых краевых пикселей, которые не образуют область многоугольника могут просто указывать на другие признаки ("шум") и исключаются из дальнейшего рассмотрения в качестве предполагаемого края. Как уже описано, касательно краевых пикселей, если число ожидаемых краевых линий выпадает из ожидаемого диапазона, то обработка может быть продолжена с этапа 712 или может быть сгенерировано состояние ошибки.
[0089] На этапе 712 определяют, меньше ли число сформированных линий, чем целевое число линий. В одном варианте осуществления, определяются края ремня и, следовательно, две линии являются ожидаемым числом целевых линий. В другом варианте осуществления ожидается получить число ребер ремня и, таким образом, две линии и число линий ребер определяют ожидаемое число целевых линий.
[0090] На этапе 712 определяют меньше ли число краевых линий, чем целевое число линий. В одном варианте осуществления пользователь уведомляется о состоянии ошибки. В другом варианте осуществления обработка продолжается до этапа 712, где изображение улучшается, чтобы сделать его более детальным. Этап 714 улучшения может включать в себя уменьшение контрастности, увеличение разрешения или другие методы улучшения изображения. Обработка затем может возобновиться на этапе 704 с улучшенным изображением.
[0091] На этапе 716 определяют, не превышает ли число краевых линий целевое число линий. В некоторых вариантах осуществления, дополнительные линии не останавливают дальнейшую обработку, в таких вариантах осуществления, этап 716 может быть опущен и обработка может продолжаться непосредственно с этапа 720. В вариантах осуществления, где определено слишком много целевых линий и требуется корректировка, этап 718 может отменить улучшение изображения, чтобы сгладить детали и предпочтительно получить в результате меньшее число линий. Этап 718 отмены улучшения может включать в себя повышение контрастности, уменьшение разрешения или другие методы отмены улучшения изображения. Обработка затем может быть продолжена на этапе 704 с изображением после отмененного улучшения.
[0092] В некоторых вариантах осуществления этапы 718 и 714 объединены в этап изменения и улучшения изображения. Параметр, такой как величина признака увеличения или уменьшения изображения, выбирается и применяется, чтобы показать больше деталей или уменьшить детализацию. Методы изменения изображения включают в себя, но не ограничивают, изменение разрешения, контрастности, яркости, гаммы, резкости или одно или более значений цвета.
[0093] На этапе 720 отмечают расположение краев. Здесь рассматриваются различные варианты осуществления маркировки. В одном варианте осуществления изображение помечается добавлением линии, такой как линии, имеющей цвет, известный модулю 1208 анализа, дисплею или другому модулю, как относящейся к расположению края. В другом варианте осуществления изображение кодируется с расположением краевых линий в формат, декодируемый модулем 1208 анализа. Такое кодирование может быть размещено в метаданных изображения или в одном или нескольких пикселях. В еще одном варианте осуществления расположение краев связано с расположением изображения и края переданным или другим образом предоставленным модулю 1208 анализа.
[0094] Схема 700 последовательности операций может быть реализована для обнаружения числа ребер на ремне, где этап 704 определяет край числа ребер, и этап 708 определяет, образуют ли края ребер линию. Обнаружение края ребра может быть выполнено путем обнаружения вершины ребра, впадины между ребрами, вершины треугольного или изогнутого ребра или впадины ребра или другого визуального сигнала очерчивания ребра. Следует понимать, что различные этапы, проиллюстрированные на схемах 600 и 700 последовательности операций могут быть опущены или переупорядочены без выхода за рамки изобретения, описанного здесь. В одном варианте осуществления модификации схемы 700 последовательности операций, на этапе 704 идентифицируют предполагаемые краевые пиксели, и обработка продолжается непосредственно до этапа 720 до метки предполагаемых краевых пикселей как краев.
[0095] Фиг.8 представляет собой вариант осуществления первого изображения 800 ремня, захваченного устройством 1204 захвата изображения. Часть изображения 900 в дальнейшем описана со ссылкой на Фиг.9.
[0096] Фиг.9 иллюстрирует часть бинарного изображения 900 первого изображения 800 ремня. Часть бинарного изображения 900 иллюстрирует часть первого изображения 800 ремня после применения процессов по изменению изображения, например повышение контрастности. Часть изображения 900, иллюстрирует некоторое число пикселей 902. Пиксели 902 изображены, чтобы показать какое значение, связанное с бинарным показателем, например черный и белый, связано с одним из пикселей 902. Другие значения (например, яркость, цветовой порог) также могут использоваться, например, когда черные пиксели 904 представляют собой пиксели с значением красный, превышающим порог и белые пиксели 906 представляют пиксели со значением красный ниже порога.
[0097] В упрощенном примере осуществления, часть бинарного изображения 900 имеет черные пиксели 904 частей ремня на изображении, а белые пиксели 906 являются лишними (например, фон) частями изображения. Изображения могут содержать артефакты, не представляющие желаемое изображение. Здесь белые пиксели 906 содержат артефакты черных пикселей 910 и черные пиксели 904 содержат артефакты белых пикселей 908. Варианты осуществления, представленные здесь, позволяют исключить артефакты из процесса обнаружения края.
[0098] Определение окрестности пикселя, как описано со ссылкой на Фиг.3, позволяет исключить артефактные пиксели 908 и 910 из предполагаемых краевых пикселей. Пиксель 912 имеет один признак (например, белый) и окрестность 3*3 пикселя 914 содержит пиксели, которые, все, имеют общий признак, и, следовательно, он может быть исключен из предполагаемых краевых пикселей. Пиксель 920 является уникальным в сетке окрестности 3*3 пикселей 522 и так же может быть исключен из предполагаемого края.
[0099] Пиксель 916, с пятью смежными соседними черными пикселями и тремя смежными белыми пикселями может рассматриваться в качестве предполагаемого края. Пиксель 918 показан с четырьмя соседними белыми и четырьмя соседними черными пикселями, и так же может быть рассмотрен в качестве предполагаемого края. Также рассматриваются более сложные примеры, иллюстрирующие варианты осуществления, где пиксель может быть рассмотрен или не может быть рассмотрен в качестве предполагаемого краевого пикселя. Одно или более повторений процесса, при которых меняется порог признака пикселя или размер или конфигурация окрестности пикселя модифицируется, также может использоваться для определения краевых пикселей. После того как, краевые пиксели определены, их расположение становится доступным для дальнейшей обработки.
[00100] Фиг.10 иллюстрирует вариант осуществления применения краевой разделительной линии 1002. В одном варианте осуществления часть изображения 1000 модифицируется или модифицированная копия части изображения 900. Краевые пиксели 1002 были идентифицированы и улучшены (представлено на рисунке штриховкой). Улучшение может быть осуществлено путем применения определенного цвета, яркости или другого идентифицируемого признака пикселя. Краевые пиксели 1002 улучшены для облегчения идентификации края ремня человеком или пользователем компьютера на части 1000 изображения. В других вариантах осуществления, расположения края записываются в форме и местоположении подходящими для использования модулем 1208 анализа. Улучшение краевых пикселей 1002 может применяться к модифицированному изображению, такому как часть бинарного изображения 900, представляющего собой обработанную версию первого изображения 800 ремня, или основному изображению, такому как первое изображение 1600 ремня.
[00101] Фиг.11 иллюстрирует вариант осуществления улучшенного изображения 1100 первого изображения 800 ремня. Улучшенное изображение 1100 показывает первый и второй края 1106 и 1108 и некоторое число темных областей 1l00B и 1104B, и некоторое число светлых областей 1l00A и 1104A, соответствующих числу ребер. Для ясности дополнительные ребра за пределами 1100 и 1104 не были идентифицированы. В одном варианте осуществления граница темных областей 1l00B и 1104B со светлыми областями 1100A и 1104A являются линиями ребер, и определены в качестве указания угла ремня 1100 на кадре Фиг.11. В другом варианте осуществления, по меньшей мере, один из краев 1106 и 1108 является указанием угла ремня 1100 относительно кадра на Фиг.11. Указание определяется посредством обработки, такой как показано на Фиг.7.
[00102] Фиг.12 иллюстрирует часть первого изображения 1200 ремня, например сегмент изображения 1100. Линии 1206 и 1208 ребер, краевые линии 1202 и 1204, и предпочтительная ось 1212 показаны в соответствии с вариантом осуществления настоящего изобретения. Краевые линии 1202 и 1204 края и линии 1206 и 1208 ребра определены, например, посредством выполнения этапов 1300, 600, и/или 700 схем последовательности операций, которые могут быть выполнены системой 1200 формирования изображения.
[00103] Как уже обсуждалось более детально со ссылкой на Фиг.6, изображение может иметь предпочтительную ось. Предпочтительная ось может соответствовать самой длинной оси прямоугольной матрицы формирования изображения, ось, связанная с предпочтительной ориентацией изображения модулем 1208 анализа изображения или с другой предпочтительной осью, с помощью которой можно получить преимущество. Линии 1206 и 1208 ребер являются внутренними по отношению к краевым линиям 1202 и 1204. Для ясности дополнительные линии ребер не показаны на фигуре.
[00104] В показанном варианте осуществления, предпочтительная ось 1212 расположена под углом θ (тэта) к краевой линии 1202. В связи с расположением линий формирования изображения вне плоскости, краевые линии 1202 и 1204 и линии 1206 и 1208 ребра могут быть не параллельны. В таких вариантах осуществления, тэта может быть углом, образованным предпочтительной осью 1212 и какой-либо одной или несколькими краевыми линиями 1204, линиями 1206 и 1208 ребра, дополнительными линиями ребра (не показано), или средним, средним арифметическим, модой, наиболее подходящей или другой функцией с возможностью получения индикации ориентации части первого изображения 1200 ремня из двух или более возможных показателей.
[00105] Фиг.13 может быть исключена или включена в анализ, где Фиг.13 иллюстрирует обработанное изображение 1300 ремня в соответствии с вариантами осуществления настоящего раскрытия изобретения. В одном варианте осуществления, краевая линия 1202 была выбрана как определяющая линия и изображение 1300 повернутое в положение, так, что угол тэта, образованный предпочтительной осью 1212 и краевой линией 1202 равен нулю. Как уже обсуждалось в соответствии с другими вариантами осуществления, для более одной линии могут быть использованы альтернативные линии или математические операции для определения ориентации ремня относительно предпочтительной оси 1212 и, после обработки они становятся параллельными к предпочтительной оси 1212.
[00106] В дополнительных вариантах осуществления, создание обработанного изображения 1300 ремня облегчает измерение характеристик обработанного изображения 1300 ремня. Дополнительный коэффициент может потребоваться для конвертации расстояния на изображении (например, расстояние между двумя или более пикселями при измерениях в пикселях) в расстояния, связанные с тестируемым объектом 1202 (например, ширина ремня, отсутствующие части из-за износа или повреждения). Дополнительный коэффициент может включать в себя известную ширину или другой размер ремня, или характеристику ремня, получение первого изображения 800 ремня происходит с помощью устройства 1204 формирования изображений с известным расстоянием от тестируемого объекта 1202, известными параметрами устройства 1204 захвата изображения (например, узкой и известной плоскостью фокуса), или формирование изображение объекта с неизвестным размером, но на практически таком же расстоянии от устройства 1204 захвата изображения, что и тестируемый объект 1202.
Знание размеров ремня дает выгоду в том, что модуль1208 анализа ремня может использовать такую информацию для определения состояния ремня или для других операций анализа.
[00107] Фиг.14 иллюстрирует изображение 1400 ремня и буфер обрезки 1412 в соответствии с вариантами осуществления настоящего раскрытия изобретения. В одном варианте осуществления, ремень 1402 лежит под не нулевым, не перпендикулярным углом к изображению 1400 ремня. Буфер 1404 захватывает изображение ремня 1402, ограниченное краем ремня 1402, до края кадра изображения 1400. Рабочие условия и факторы окружающей среды могут не дать буферу 1404 захватить действительный и полный край ремня 1402. В результате, обработка повернутого буфера 1404 может быть подвергнута влиянию многочисленных ошибок из-за не включенной информации об изображении.
[00108] В другом варианте осуществления, буфер обрезки 1412 ограничен ремнем с увеличенным буфером ширины ремня 1402. Величина буфера обрезки 1412 выходит за пределы буфера 1404 и может варьироваться в соответствии со степенью уверенности, что край ремня 1402 может быть точно захвачен. Например, факторы окружающей среды (например, освещение, рубцы на ремне и т.д.), свойства изображения (например, контраст, степень поворота ремня и т.д.), и/или выбор пользователя могут определить протяженность буфера обрезки 1412 за пределами буфера 1404. В одном варианте осуществления буфер обрезки 1412 приблизительно на 10% больше чем буфер 1404.
[00109] В одном варианте осуществления, буфер обрезки 1412 может быть короче по длине ремня 1402, так что буфер обрезки 1412 может оставаться в пределах кадра изображения 1400 ремня.
[00110] Фиг.15 иллюстрирует последовательность обработки 1500 в соответствии с вариантами осуществления настоящего раскрытия изобретения. В одном варианте осуществления, последовательность обработки 1500 включает в себя некоторое число операционных этапов 1502, 1504, 1508, 1510, 1512, и 1514. В других вариантах осуществления, может быть выполнено большее или меньшее число этапов или этапы могут быть в другой последовательности так, что пользователь может получить изображение ремня для анализа и просмотреть результаты анализа.
[00111] В одном варианте осуществления пользователь начинает работу с этапа 1502 стартового экрана и приступает к этапу 1504 выбора операции. Этап 1504 выбора операции может продолжаться до этапа 1506 сохранения результатов, этапа 1508 помощи, и этапа 1510 выбора ребер. Этап 1510 выбора ребер может затем продолжаться до этапа 1512 захвата изображения и этапа 1514 результатов, где пользователь получает результаты анализа изображения ремня. Пользователь может возвращаться к предыдущему этапу процесса.
[00112] В одном варианте осуществления последовательность обработки 1500 является приложением и начинается с этапа 1502 стартового экрана, отображающего начальную информацию для приложения. Этап 1504 выбора операции отображает опции на выбор. Одна опция является сохраненным этапом 1506 результатов, где предыдущие захваты изображения (см. этап 1512) и/или результаты (см. этап 1514) могут быть извлечены для отображения.
Этап 1508 помощи предоставляет инструкции, обучающие материалы, примеры, или другую помощь пользователю, работающему с приложением, использующим последовательность обработки 1500.
[00113] Этап 1510 выбора ребер 1510 отображает интерактивную презентацию, где число ребер ремня для анализа вводится пользователем. Пользователь может затем приступить к этапу 1512 захвата изображения, где предварительно изображение может быть выбрано или захвачено посредством встроенной камеры или камеры с доступом к устройству, выполняющему последовательность обработки 1500, или другим способом получающему захват изображения ремня.
[00114] С помощью изображения ремня, захваченного на этапе 1512 захвата изображения, ремень может быть проанализирован в соответствии с, по меньшей мере, одним вариантом осуществления, описанного здесь, и представлен на этапе 1514 результатов. В дополнительном варианте осуществления на этапе 1512 захвата изображения, после того, как изображение было выбрано или получено, может отображаться ход анализа до предоставления результатов на этапе 1514.
[00115] Фиг.16A-16C иллюстрируют последовательность обработки 1600, как она представляется пользователю, в соответствии с вариантами осуществления настоящего раскрытия изобретения. В одном варианте осуществления, последовательность обработки 1600 является визуальной презентацией одного устройства, выполняющего последовательность обработки 1500, и представляющего отображение в соответствии с этапами последовательности обработки 1500. Устройство может быть сотовым телефоном, карманным компьютером (PDA), планшетом, лэптопом, настольным компьютером с прикрепленной камерой или другим устройством с возможностью выполнения этапов последовательности обработки 1500.
[00116] В одном варианте осуществления, отображение 1602 представлено пользователю в соответствии с этапом 1502, отображение 1604 представлено пользователю в соответствии с этапом 1504, отображение 1606 представлено пользователю в соответствии с этапом 1506, отображение 1608 представлено пользователю в соответствии с этапом 1508, отображение 1610 представлено пользователю в соответствии с этапом 1510, и отображение 1612 представлено пользователю в соответствии с этапом 1512. В другом варианте осуществления, одно из отображений 1614 представлено пользователю в соответствии с этапом 1514. Отображение 1612, может содержать захваченное изображение, прямое изображение и принимать пользовательский ввод для захвата прямого изображения (например, путем прикосновения к изображению 1616), или опцию для поиска изображения. Отображение 1612 может содержать индикатор хода процесса 1618, текст и/или другой индикатор процесса анализа изображения. [00117] В одном варианте осуществления анализ может определить одно из трех состояний ремня (например, хорошее, удовлетворительное, плохое; 1, 2, 3; т.д.) и выбрать одно из отображений 1614A, 1614B, и 1614C для соответствующего отображения пользователю. В первом дополнительном варианте осуществления, отображение 1614A представлено пользователю в соответствии с этапом 1514 после анализа, указывающего, что ремень находится в хорошем состоянии, и может в дальнейшем указать, что ремень может оставаться в эксплуатации. Во втором дополнительном варианте осуществления, отображение 1614B представлено пользователю в соответствии с этапом 1514 после анализа, указывающего, что ремень находится в удовлетворительном состоянии и может в дальнейшем указать, что близится конец срока службы ремня. В третьем дополнительном варианте осуществления, отображение 1614C представлено пользователю в соответствии с этапом 1514 после анализа указывающего, что ремень находится в плохом состоянии и в дальнейшем может указать на необходимость замены ремня.
[00118] Конкретные детали даны в описании, чтобы обеспечить полное понимание вариантов осуществления. Тем не менее, должно быть понятно любому специалисту в данной области техники, что варианты осуществления могут быть реализованы без этих конкретных деталей. Например, схемы могут быть показаны на блок-схемах для того, чтобы не делать неясными варианты осуществления из-за ненужных деталей. В других случаях хорошо известные схемы, процессы, алгоритмы, структуры и методы могут быть показаны без излишней детализации, с тем, чтобы избежать усложнения вариантов осуществления.
[00119] Кроме того, следует отметить, что варианты осуществления были описаны как процесс, который изображен в виде схемы последовательности операций, схемы последовательности, схемы потока данных, структурной схемы, или блок-схемы. Хотя схема последовательности операций может описать операции как последовательный процесс, многие из операций могут выполняться параллельно или одновременно. Кроме того, порядок операций может быть изменен. Процесс заканчивается, когда его операции завершены, но может иметь дополнительные этапы, не включенные в фигуру. Процесс может соответствовать способу, функции, процедуре, подпрограмме и т.д. Если процесс соответствует функции, его прекращение соответствует возврату функции к вызывающей функции или главной функции.
[00120] Кроме того, варианты осуществления могут быть реализованы аппаратными средствами, программным обеспечением, микропрограммным обеспечением, связующим программным обеспечением, микрокомандами, языками описания аппаратных средств или любой их комбинацией. При реализации программным обеспечением, аппаратным обеспечением, связующим программным обеспечением или микрокомандами, программный код или сегменты кода для выполнения необходимых задач могут быть сохранены на машиночитаемом носителе, таком как носитель информации. Процессор(ы) может выполнять необходимые задачи. Сегмент кода может представлять собой процедуру, функцию, подпрограмму, программу, стандартную программу, стандартную подпрограмму, модуль, пакет программного обеспечения, класс или любую комбинацию инструкций, структуру данных или программных сегментов. Сегмент кода может быть связан с другим сегментом кода или аппаратной схемой посредством передачи и/или приема информации, данных, аргументов, параметров или содержимого памяти. Информация, аргументы, параметры, данные и т.д. могут быть переданы, переадресованы или отправлены посредством любого подходящего средства, включая общую память, передачу сообщения, эстафетную передачу, передачу по сети и т.д.
[00121] Несмотря на то что иллюстративные варианты осуществления изобретения здесь были подробно описаны, следует понимать, что изобретательские концепции могут быть воплощены и использованы по-разному, и что прилагаемая формула изобретения предназначена для того, чтобы включить такие вариации, кроме случаев ограниченных известным уровнем техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРЕНИЕ ИЗНОСА РЕМНЯ ПОСРЕДСТВОМ ОБНАРУЖЕНИЯ КРОМКИ В РАСТРОВОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2582067C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ЦВЕТА ИЗ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2567500C2 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕАЛИЗАЦИИ ИНТЕРФЕЙСА С ВЫСОКОЙ СКОРОСТЬЮ ПЕРЕДАЧИ ДАННЫХ | 2005 |
|
RU2337497C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ЦВЕТА ИЗ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2550150C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ СКОЛЬЖЕНИЯ ЛЕГКОГО | 2017 |
|
RU2740257C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ЦВЕТА ИЗ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2567863C2 |
| СИСТЕМА И СПОСОБЫ КОНТРОЛЯ ПОВЕДЕНИЯ ВОДИТЕЛЯ ДЛЯ УПРАВЛЕНИЯ АВТОПАРКОМ В ПАРКЕ ТРАНСПОРТНЫХ СРЕДСТВ С ИСПОЛЬЗОВАНИЕМ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, ОБРАЩЕННОГО К ВОДИТЕЛЮ | 2018 |
|
RU2756256C1 |
| ЗАВИСИМЫЙ ОТ РЕЖИМА КОЭФФИЦИЕНТ СКАНИРОВАНИЯ И ПРЕОБРАЗОВАНИЕ НАПРАВЛЕНИЯ ДЛЯ РАЗНЫХ ФОРМАТОВ ДИСКРЕТИЗАЦИИ ЦВЕТА | 2013 |
|
RU2619888C2 |
| ЗАВИСИМЫЙ ОТ РЕЖИМА КОЭФФИЦИЕНТ СКАНИРОВАНИЯ И ПРЕОБРАЗОВАНИЕ НАПРАВЛЕНИЯ ДЛЯ РАЗНЫХ ФОРМАТОВ ДИСКРЕТИЗАЦИИ ЦВЕТА | 2013 |
|
RU2751080C2 |











Изобретение относится к области обработки изображений. Технический результат – повышение скорости и точности анализа изображения тестируемого объекта. Способ обработки изображения содержит этапы, на которых: получают изображение тестируемого объекта, имеющее кадр с выбранной предварительно определенной осью координат и содержащее некоторое число пикселей; идентифицируют указание угла тестируемого объекта в изображении относительно выбранной предварительно определенной оси координат кадра, причем упомянутое указание является одним из края, метки или ребра тестируемого объекта; этап идентификации включает в себя этапы, на которых: определяют, какие из числа пикселей образуют некоторое число наборов краевых пикселей; определяют, какие из некоторого числа наборов краевых пикселей образуют некоторое число предполагаемых областей указания; определяют указание из по меньшей мере двух из числа предполагаемых областей указания; определяют угол между выбранной предварительно определенной осью координат кадра и указанием; поворачивают изображение на отрицательное значение угла; и выполняют анализ на повернутом изображении тестируемого объекта. 3 н. и 18 з.п. ф-лы, 20 ил.
1. Способ обработки изображения тестируемого объекта, которое должно быть проанализировано, содержащий этапы, на которых:
получают изображение тестируемого объекта, имеющее кадр с выбранной предварительно определенной осью координат и содержащее некоторое число пикселей;
идентифицируют указание угла тестируемого объекта в изображении относительно выбранной предварительно определенной оси координат кадра, причем упомянутое указание является одним из края, метки или ребра тестируемого объекта, способных указывать угловое положение тестируемого объекта в кадре, при этом упомянутый этап идентификации включает в себя этапы, на которых:
определяют, какие из числа пикселей образуют некоторое число наборов краевых пикселей;
определяют, какие из некоторого числа наборов краевых пикселей образуют некоторое число предполагаемых областей указания, причем каждая предполагаемая область образует многоугольник, ограниченный по меньшей мере одним из числа наборов краевых пикселей; и
определяют указание из по меньшей мере двух из числа предполагаемых областей указания;
определяют угол между выбранной предварительно определенной осью координат кадра и указанием;
поворачивают изображение на отрицательное значение угла; и
выполняют анализ на повернутом изображении тестируемого объекта;
или выполняют анализ на изображении тестируемого объекта без поворачивания изображения.
2. Способ по п. 1, в котором определение указания дополнительно содержит определение указания из по меньшей мере одного из среднего арифметического, среднего и моды из двух или более предполагаемых линий указания.
3. Способ по п. 1, в котором определение указания из по меньшей мере двух из числа предполагаемых областей указания дополнительно содержит определение указания из числа предполагаемых областей указания, указывающих по меньшей мере один край тестируемого объекта.
4. Способ по п. 1, дополнительно содержащий:
определение по меньшей мере одного из следующего:
количество определенного числа краевых пикселей находится за пределами ожидаемого диапазона, и
количество определенного числа предполагаемых линий указания находится за пределами ожидаемого диапазона;
изменение изображения; и
определение, какие из числа пикселей измененного изображения представляют собой число краевых пикселей.
5. Способ по п. 4, в котором изменение изображения содержит изменение изображения путем изменения по меньшей мере одного из разрешения, контрастности, яркости, по меньшей мере одного кода цвета, гаммы или резкости.
6. Способ по п. 1, в котором этап определения, какие из числа пикселей являются числом краевых пикселей, дополнительно включает в себя выполнение анализа окрестности пикселей по числу пикселей для идентификации числа пикселей.
7. Способ по п. 1, дополнительно содержащий отображение изображения на устройстве.
8. Способ по п. 5, дополнительно содержащий изменение разрешения измененного изображения для сведения на нет эффекта от применения разрешения.
9. Способ по любому из пп. 1-8, в котором тестируемым объектом является ремень.
10. Способ по п. 9, в котором по меньшей мере один из числа наборов краевых пикселей содержит очерчивание ребра ремня.
11. Система основанной на изображении оценки, содержащая:
процессор изображений, выполненный с возможностью создания обработанного изображения тестируемого объекта из захваченного изображения тестируемого объекта, причем захваченное изображение содержит некоторое число пикселей, посредством поворота захваченного изображения на угол, определенный посредством идентификации указания в захваченном изображении относительно выбранной предварительно определенной оси координат кадра захваченного изображения, при этом угол определяется процессором, который выполнен с возможностью:
определения, какие из числа пикселей образуют некоторое число наборов краевых пикселей;
определения, какие из некоторого числа наборов краевых пикселей образуют некоторое число предполагаемых областей указания, причем каждая предполагаемая область образует многоугольник, ограниченный по меньшей мере одним из числа наборов краевых пикселей; и
определения указания из по меньшей мере двух из числа предполагаемых областей указания;
модуль анализа, выполненный с возможностью оценки обработанного изображения тестируемого объекта; и
носитель информации, выполненный с возможностью хранения обработанного изображения тестируемого объекта.
12. Система по п. 11, дополнительно содержащая устройство захвата изображения, выполненное с возможностью захвата упомянутого изображения.
13. Система по п. 11, дополнительно содержащая пользовательский интерфейс, выполненный с возможностью приема команд ввода в систему от пользователя-человека.
14. Система по п. 11, в которой процессор изображения дополнительно содержит:
процессор обнаружения поворота изображения, выполненный с возможностью определять угол тестируемого объекта по отношению к кадру захваченного изображения; и
процессор поворота изображения, выполненный с возможностью поворачивать захваченное изображение на отрицательное значение определенного угла тестируемого объекта.
15. Система по п. 11, дополнительно содержащая модуль анализа изображений, выполненный с возможностью анализа тестируемого объекта по захваченному изображению.
16. Невременный машиночитаемый носитель, хранящий программу, которая при выполнении побуждает вычислительное устройство выполнять способ обработки изображения тестируемого объекта, включающий в себя:
получение изображения тестируемого объекта;
идентификацию указания угла тестируемого объекта относительно выбранной предварительно определенной оси координат кадра, при этом этап идентификации указания дополнительно содержит:
определение, какие из числа пикселей образуют некоторое число наборов краевых пикселей;
определение, какие из некоторого числа наборов краевых пикселей образуют некоторое число предполагаемых областей указания, причем каждая предполагаемая область образует многоугольник, ограниченный по меньшей мере одним из числа наборов краевых пикселей; и
определение указания из по меньшей мере двух из числа предполагаемых областей указания;
определение угла между выбранной предварительно определенной осью координат кадра и указанием;
поворот изображения на отрицательное значение угла;
анализ повернутого изображения тестируемого объекта; и
сохранение повернутого изображения.
17. Невременный машиночитаемый носитель по п. 16, при этом идентификация указания дополнительно содержит:
идентификацию окрестностей пикселя, которые указывают число краевых пикселей;
идентификацию числа предполагаемых линий из числа наборов числа краевых пикселей; и
идентификацию указания из по меньшей мере одного из числа предполагаемых линий указания.
18. Невременный машиночитаемый носитель по п. 16, при этом этап идентификации указания дополнительно содержит идентификацию первого и второго края тестируемого объекта.
19. Невременный машиночитаемый носитель по п. 18, дополнительно содержащий обрезку повернутого изображения для исключения частей изображения, не находящихся между первым и вторым краем.
20. Невременный машиночитаемый носитель по п. 18, дополнительно содержащий обрезку повернутого изображения для включения буфера обрезки за пределами первого и второго края.
21. Невременный машиночитаемый носитель по п. 20, в котором буфер обрезки на десять процентов больше, чем обрезанное повернутое изображение.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6298157 B1, 02.10.2001 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| RU 2011107203 A, 27.08.2012. | |||

