Изобретение относится к области машиностроения транспортных средств, а именно к приводам индивидуальных транспортных средств, приводимых в действие мускульной силой, и применяется для приводов велосипедов с возвратно-качательным движением педалей.
Известен «Мускульный привод транспортного средства», содержащий двуплечие педальные рычаги, задние плечи которых снабжены зубчатыми секторами, связанными с шестернями, которые посредством обгонных муфт соединены с ведущим колесом, при этом привод снабжен дополнительными двуплечими рычагами, содержащими ролики и связанный пружиной с рамой дополнительный зубчатый сектор, а на средней части педальных рычагов выполнены продольные пазы, в которые введены ролики, причем на раме установлен маховик, который посредством дополнительной обгонной муфты и шестерни связан с дополнительным зубчатым сектором. Авт. св-во СССР №1572914, МПК: B62M 1/04, д. публ. 1990.06. 23.
Известен «Альтернативный привод велосипеда, увеличивающий скорость его движения», содержащий педальные рычаги, осуществляющие качательные движения относительно горизонтальной плоскости, повышающую прямозубую передачу с внутренним зацеплением, установленную с каждой стороны каретки, причем ведущим звеном передачи, является зубчатый сектор, закрепленный на рычаге педали, при этом шестерня ее также является обоймой роликовой обгонной муфты, закрепленной на валу ведущей звездочки цепной передачи, при этом привод снабжен шарнирными опорами рычагов педалей, установленными на оси заднего колеса, механизмом кинематической связи рычагов педалей, установленным на раме между кареткой и задним колесом, состоящим из двух конструктивно симметричных и телескопически собранных на общей оси рычажно-педальных узлов, у которых к рычагам закреплены короткие оси с установленными на них роликами, введенные в продольные горизонтальные пазы рычагов педалей привода. При этом на рычагах педалей закреплены резиновые упоры, ограничивающие ход осей и роликов в пазах рычагов педалей. Патент РФ на ПМ №90760, МКИ: B62M 1/04; публ. 2010.01.20.
Известен «Мускульный привод транспортного средства с возвратно-поступательным движением педалей», содержащий рычаги с педалями, установленные на оси каретки, каждый из рычагов связан с механизмом изменения передаточного отношения, выполненного в виде зубчатого зацеплении, один элемент которого связан с рычагом, а другой посредством гибкой тяги с элементами ведущего колеса через обгонные муфты и упругий элемент для возврата рычагов с педалями в исходное положение, при этом каждый из рычагов с педалями снабжен дополнительным рычагом жестко связанным с ним, на дополнительном рычаге размещена рейка для взаимодействия с шестерней, связанной гибкой тягой с дополнительной шестерней, установленной на рычаге и жестко связанной со звездочкой ведущего колеса, при этом он снабжен устройством синхронизации в виде барабанов, установленных на дополнительных рычагах и рычагах, связанных между собой гибким органом, а одна из реечных шестерен связана с элементом управления, размещенном на руле. Авт. св-во СССР №1507639, МКИ: B62M 1/04; публ. 1989.09.15.
Наиболее близким аналогом к предлагаемому в качестве изобретения является аналог «Мускульный привод транспортного средства», содержащий цепные передачи, муфты свободного хода, связанные со звездочками цепных передач, закрепленными на раме, рычажные системы, на коромыслах которых расположены педальные элементы с возможностью вертикального возвратно-поступательного перемещения относительно дорожного полотна за счет силы тяжести человека при его вертикальном положении, при этом коромысла подвижно соединены через шатуны с коленчатым валом, жестко соединенным с ведущими звездочками цепных передач, при этом педальные элементы выполнены с возможностью вращения относительно коромысел, кроме того педальные элементы дополнительно снабжены регулируемыми упорами для вывода рычажных систем из мертвого положения в своем верхнем положении.
Патент РФ на ПМ №78163, МКИ: B62M 1/04; публ. 2008.11.20.
К техническому результату относится повышение мощности привода путем применения в конструкции привода механизма кинематической связи рычажных педальных элементов с осью привода, который позволяет передавать крутящий момент без вращения педалей по круговой траектории, а путем возвратно-поступательного движения педальных рычагов при сохранении возможности применять различное количество скоростей и переключать их как в обычном велосипеде.
Вышеуказанный технический результат достигается за счет того, что «Мускульный привод транспортного средства» содержит раму, цепную передачу, связанную через звездочки с осью колеса и рычажные педальные элементы. Последние выполнены с возможностью вертикального возвратно-поступательного перемещения относительно дорожного полотна за счет мускульной силы ног. Рычажные педальные элементы через механизм кинематической связи подвижно соединены с осью привода. При этом механизм кинематической связи рычажных педальных элементов с осью привода снабжен втулкой, жестко установленной на раме привода. Внутри металлической втулки установлен неподвижно на оси привода держатель, Между неподвижной металлической втулкой и держателем оси привода расположена подвижная втулка с возможностью вращения в одном направлении. В свою очередь держатель оси привода снабжен отверстием, в которое вставлена заглушка. На подвижной втулке жестко закреплены с одной стороны храповик-звездочка, а с другой - кольцевой храповик. На оси привода также с двух сторон установлены втулки, являющиеся подшипниками скольжения для основных конических шестерней, в пазах которых расположены шпонки, обеспечивающие связь шестерен с рычагами педалей. На выступающей цилиндрической части заглушки установлена втулка, являющаяся подшипником скольжения для промежуточной конической шестерни. При этом кинематическую связь педальных рычагов со звеном цепной передачи на ведущее колесо обеспечивают храповик-звездочка и кольцевой храповик через собачки, установленные в отверстиях педальных рычагов и снабженные пружинами сжатия. Кроме того, ось привода снабжена двумя стопорными планками, одна сторона которых жестко закреплена на раме, а на другой стороне выполнены отверстия, которыми стопорные планки фиксируют ось привода по лыскам, выполненным на ней.
Мускульный привод транспортного средства поясняется фигурами 1 и 2.
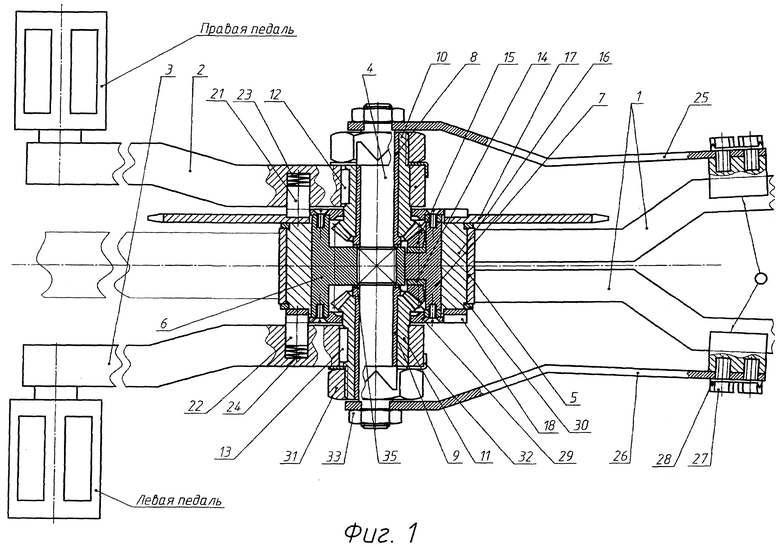
Фиг.1 - Мускульный привод транспортного средства - общий вид.
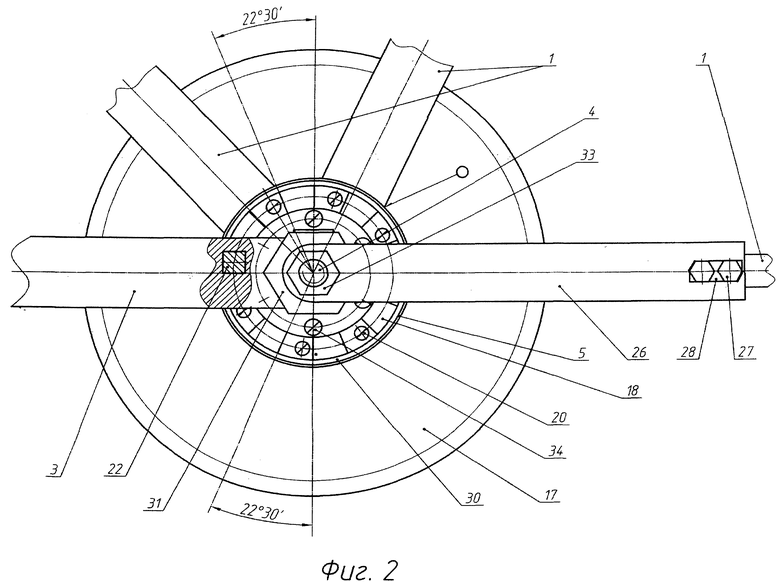
Фиг.2 - Мускульный привод транспортного средства - вид спереди.
Мускульный привод транспортного средства согласно фиг.1 и 2 содержит: раму 1, педальные рычаги: правый 2, левый 3, ось привода 4, неподвижную металлическую втулку 5, жестко соединенную с рамой 1 транспортного средства. Внутри неподвижной втулки 5 на оси привода 4 жестко установлено неподвижный держатель 6 оси 4, в отверстие держателя 6 вставлена заглушка 7.
На оси привода 4 также установлены втулки 8 (с правой стороны) и 9 (с левой стороны), являющиеся подшипниками скольжения для основных конических шестерней 10 и 11, которые связаны с помощью шпонок 12 и 13 с рычагами педалей 2 и 3. На выступающей цилиндрической части заглушки 7 установлена втулка 14, являющаяся подшипником скольжения для промежуточной конической шестерни 15.
Между неподвижной металлической втулкой 5 и расположенным внутри нее неподвижным держателем 6, жестко закрепленным на оси 4, находится вращающаяся в одном направлении втулка 16, на которой жестко закреплены с одной стороны храповик-звездочка 17, с другой - кольцевой храповик 18. Храповик-звездочка 17 и кольцевой храповик 18 крепятся к вращающейся втулке 16 винтами 20 (фиг.2). Храповик-звездочка 17 является звеном цепной передачи на ведущее колесо. Кроме того, храповик-звездочка 17 находится в постоянном контакте с собачкой 21, а кольцевой храповик 18 с собачкой 22. Постоянный контакт храповика-звездочки 17 с собачкой 21 обеспечивает пружина сжатия 23, а кольцевого храповика 18 с собачкой 22 пружина сжатия 24. Собачка 21 расположена в отверстии правого педального рычага 2, а собачка 22 в отверстии левого педального рычага 3. Обе собачки 21 и 22 перемещаются в своих отверстиях на расстояние, равное высоте зуба храповика. Стопорные планки 25 и 2 предохраняют от вращения ось привода 4 и жестко связанный с ней держатель 6. Одной стороной планки фиксируют ось 4 по лыскам, выполненным на ней, другой стороной планки крепятся к раме 1 болтами 27 со стопорными пластинами (упорами) 28. Осевое перемещение оси 4 с держателем 6 относительно втулки 16 ограничивают крышки 29 и кольца ограничительные 30. Крышки 29 также закрывают полости корпуса привода. Гайка 31 и стопорная шайба 32 обеспечивают жесткую связь рычагов 2 и 3 с основными коническими шестернями 10 и 11. Гайка 33 обеспечивает жесткую связь стопорных планок 25 и 26 с осью 4. Крышки 29 крепятся к корпусу привода винтами 34 (фиг.2). Кольца 35 является регулировочными.
Устройство работает следующим образом. При нажатии на педаль правого рычага 2, она движется вниз, рычаг 2 поворачивается относительно центральной оси привода 4 и вращение через шпонку 12 передается правой конической шестерне 10. От правой конической шестерни 10 вращение через промежуточную коническую шестерню 15 передается левой конической шестерне 11, которая начинает вращаться в сторону, противоположную правой. Вращение от левой конической шестерни 11 через шпонку 13 передается левому рычагу 3, который начинает поднимать левую педаль. В процессе нажатия на левую педаль правая педаль поднимается. Затем цикл повторяется.
Вращение на храповик-звездочку 17 привода передается собачкой 21. При повороте рычага 2 от верхнего положения педали к нижнему положению собачка 21 западает во впадину между зубьями храповика-звездочки 17 и начинает вращать храповик-звездочку 17 и втулку 16. При повороте рычага 2 в обратном направлении собачка 21 скользит по зубцам храповика-звездочки 17. При повороте рычага 3 от верхнего положения педали к нижнему положению, собачка 23 западает во впадину кольцевого храповика 18 и продолжает вращать кольцевой храповик 18, втулку 16 и храповик-звездочку 17 в том же направлении. При обратном ходе собачка 22 аналогично собачке 21 скользит по зубцам кольцевого храповика 18. В данном случае в конструкции привода используют подшипники скольжения. Однако для уменьшения потерь на трение можно использовать и подшипники качения.
Предложенная в качестве изобретения конструкция привода позволяет передавать крутящий момент без вращения педалей по круговой траектории. Педали осуществляют возвратно-поступательное движение по дуге окружности, которая меньше 180°. При этом педали не попадают в самую верхнюю и самую нижнюю точки, что позволяет исключить участок траектории, при котором передача крутящего момента наименьшая. Конструкция привода позволяет передавать большую мощность по сравнению с обычным приводом. Увеличение мощности при одинаковом усилии нажима на педали обычного привода и привода разработанной конструкции достигается за счет исключения в приводе зон прохождения педалей, когда вертикальная сила не создает необходимого момента. Если педаль находится в верхней точке обычного привода, момент от вертикальной силы равен нулю, что исключено в данном приводе. Увеличение мощности может происходить и за счет возможности удлинения рычага педалей. Разработанная конструкция позволяет применять различное количество скоростей как в обычном велосипеде и их переключение. Возможна установка и откидного упора для парковки велосипеда.
Привод имеет звездочку и цепную передачу как в обычном велосипеде и позволяет ему перемещаться, если педали придерживаются ногами в стационарном положении. Привод позволяет применить только ручную систему тормозов и устанавливать несколько звездочек для переключения скоростей.
Таким образом, особенность конструкции привода состоит в том, что педали перемещаются не по круговой траектории, что обеспечивается тремя коническими шестернями, и передача крутящего момента на звездочку происходит через кольцевые храповые механизмы с торцевыми зубьями.
Привод можно устанавливать на обычный велосипед, на переднее колесо детского велосипеда, на машины с приводом от ног, на прогулочные водные велосипеды, на трехколесные велосипеды для перевозки пассажиров и контейнеров.
Изобретение относится к приводимому в действие с помощью мускульной силы. Механизм кинематической связи рычажных педальных элементов с осью привода снабжен втулкой, жестко установленной на раме привода, внутри металлической втулки установлен неподвижно на оси привода держатель. Между неподвижной металлической втулкой и держателем оси привода расположена подвижная втулка с возможностью вращения в одном направлении. Держатель оси привода снабжен отверстием, в которое вставлена заглушка, а на подвижной втулке жестко закреплены с одной стороны храповик-звездочка, а с другой - кольцевой храповик. На оси привода с двух сторон установлены втулки, являющиеся подшипниками скольжения для основных конических шестерней, в пазах которых расположены шпонки, обеспечивающие связь шестерен с рычагами педалей. На выступающей цилиндрической части заглушки установлена втулка, являющаяся подшипником скольжения для промежуточной конической шестерни. Кинематическую связь педальных рычагов со звеном цепной передачи на ведущее колесо обеспечивают храповик-звездочка и кольцевой храповик через собачки, установленные в отверстиях педальных рычагов и снабженные пружинами сжатия. Ось привода снабжена двумя стопорными планками, одна сторона которых жестко закреплена на раме, а на другой стороне выполнены отверстия, которыми стопорные планки фиксируют ось привода по лыскам, выполненным на ней. Обеспечивается повышение мощности привода. 2 ил.
Мускульный привод транспортного средства, содержащий раму, цепную передачу, связанную через звездочки с осью колеса, рычажные педальные элементы, последние выполнены с возможностью вертикального возвратно-поступательного перемещения относительно дорожного полотна за счет мускульной силы ног, при этом рычажные педальные элементы через механизм кинематической связи подвижно соединены с осью привода, отличающийся тем, что механизм кинематической связи рычажных педальных элементов с осью привода снабжен втулкой, жестко установленной на раме привода, внутри металлической втулки установлен неподвижно на оси привода держатель, при этом между неподвижной металлической втулкой и держателем оси привода расположена подвижная втулка с возможностью вращения в одном направлении, в свою очередь держатель оси привода снабжен отверстием, в которое вставлена заглушка, а на подвижной втулке жестко закреплены с одной стороны храповик-звездочка, а с другой - кольцевой храповик, а также на оси привода с двух сторон установлены втулки, являющиеся подшипниками скольжения для основных конических шестерней, в пазах которых расположены шпонки, обеспечивающие связь шестерен с рычагами педалей, кроме того на выступающей цилиндрической части заглушки установлена втулка, являющаяся подшипником скольжения для промежуточной конической шестерни, при этом кинематическую связь педальных рычагов со звеном цепной передачи на ведущее колесо обеспечивают храповик-звездочка и кольцевой храповик через собачки, установленные в отверстиях педальных рычагов и снабженные пружинами сжатия, причем ось привода снабжена двумя стопорными планками, одна сторона которых жестко закреплена на раме, а на другой стороне выполнены отверстия, которыми стопорные планки фиксируют ось привода по лыскам, выполненным на ней.
| Прибор для контроля профиля криволинейных поверхностей | 1948 |
|
SU78163A1 |
| RU 2010124873 A, (ГУЗЮКИН В.П., et al), 27.12.2011 | |||
| CN 201116147 Y, (TONGNIAN GAO), 17.09.2008 | |||
| KR 100902190 B1, (NAM GU KWANG JU CITY), 10.06.2009 | |||

