Изобретение относится к сельскому хозяйству, преимущественно к выравниванию слоя зернового вороха на очистке зерноуборочных комбайнов при их работе на склонах полей.
Известно устройство (аналог) [1], содержащее установленное в боковинах молотилки комбайна решето, автоматическую систему слежения за боковыми наклонами молотилки комбайна с исполнительным звеном, связанным тягой с поворотной опорой, соединенной шарнирно посредством поводка с решетом.
Однако для этого устройства характерна недостаточная эффективность сепарации на решете как на ровных участках, так и на склонах. При работе комбайна на ровных участках за счет возникающей центробежной силы при колебательном движении поводка, а следовательно, решета зерновой ворох смещается в сторону действия центробежной силы, в результате чего нарушается равномерность распределения вороха на решете и ухудшается сепарация. При работе комбайна на склоне показатель кинематического режима бокового перемещения решета вверх и вниз по боковому крену близок к единице, что снижает эффективность сепарации зерна на решете при боковых кренах.
Известно устройство (ближайший аналог) [2], содержащее автоматическую систему слежения за боковыми наклонами молотилки комбайна, исполнительное звено, поворотную опору, поводок из кинематических звеньев 5-го класса.
При работе комбайна на склоне показатель кинематического режима боковых перемещений решета вверх по боковому крену и вниз по боковому крену близок к 1,0, что снижает эффективность сепарации зерна на решете при боковом крене.
Задачами (целью) изобретения являются обеспечение выравнивания слоя зернового вороха по ширине решета, снижение потерь зерна и увеличение производительности комбайна при уборке на склонах полей.
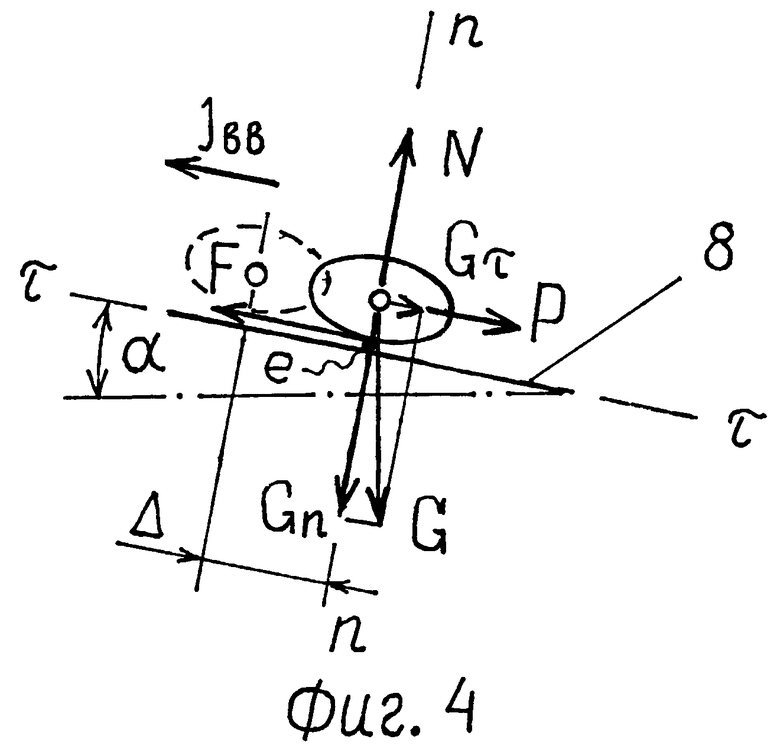
Цель достигается тем, что при динамическом выравнивании слоя вороха на решете при дополнительных боковых колебаниях решета очистки под действием сил (Фиг.1 и Фиг.2), действующих на частицу вороха, при выравнивании слоя вороха на решете происходит совместное движение вороха с решетом при движении решета вверх по крену и скольжение вороха вверх при движении решета вниз по крену.
Цель достигается тем, что при боковом крене зерноуборочного комбайна кулачок через толкатель сообщает решету дополнительные боковые равноускоренные колебания, причем численные значения бокового ускорения решета вверх по боковому крену менее критического, а при движении вниз по боковому крену более критического. В результате происходит совместное равноускоренное движение зернового вороха с решетом при боковом движении решета вверх по боковому крену и скольжение решета вниз относительно зернового вороха при равноускоренном боковом движении решета вниз по боковому крену. Зерновой ворох остается в верхнем положении на решете, смещенный вверх по отношению к решету под действием силы инерции на величину хода толкателя.
Так происходит выравнивание слоя зернового вороха на решете при боковом крене комбайна.
Численные значения критического бокового ускорения решета вверх и вниз по боковому крену для уборки некоторых наиболее распространенных культур (пшеница, овес, горох) определены по формулам:
вниз по боковому крену jКР.ВН=g(sinα+cosαtgφ),
вверх по боковому крену jKP.ВВ=g(cosαtgφ-sinα),
где jКР.ВН - значение критического бокового ускорения решета вниз по боковому крену,
g - ускорение земного притяжения,
α - угол бокового крена,
φ - динамический угол трения зернового вороха о поверхность решета,
jKP.ВВ - значение критического бокового ускорения решета вверх по боковому крену.
По перемещению толкателя (амплитуда колебания решета, грохота), равному Δ, определено время бокового движения решета вверх по боковому крену tBB и время бокового движения решета вниз по боковому крену tBH при равноускоренном движении по выражениям:
вверх по боковому крену tBB=(2Δ/jKP.ВВ)1/2,
вниз по боковому крену tBH=(2Δ/jKP.ВН)1/2.
Время бокового движения решета вверх по боковому крену больше, чем время движения вниз по боковому крену. Их отношением является показатель кинематического режима бокового движения решета при боковом крене комбайна:

где ε - показатель кинематического режима бокового движения решета при боковом крене комбайна;
tBB - время бокового движения решета вверх по боковому крену;
tBH - время бокового движения решета вниз по боковому крену,
jKP.BH - критическое ускорение решета вниз по боковому крену,
jKP.BB - критическое ускорение решета вверх по боковому крену.
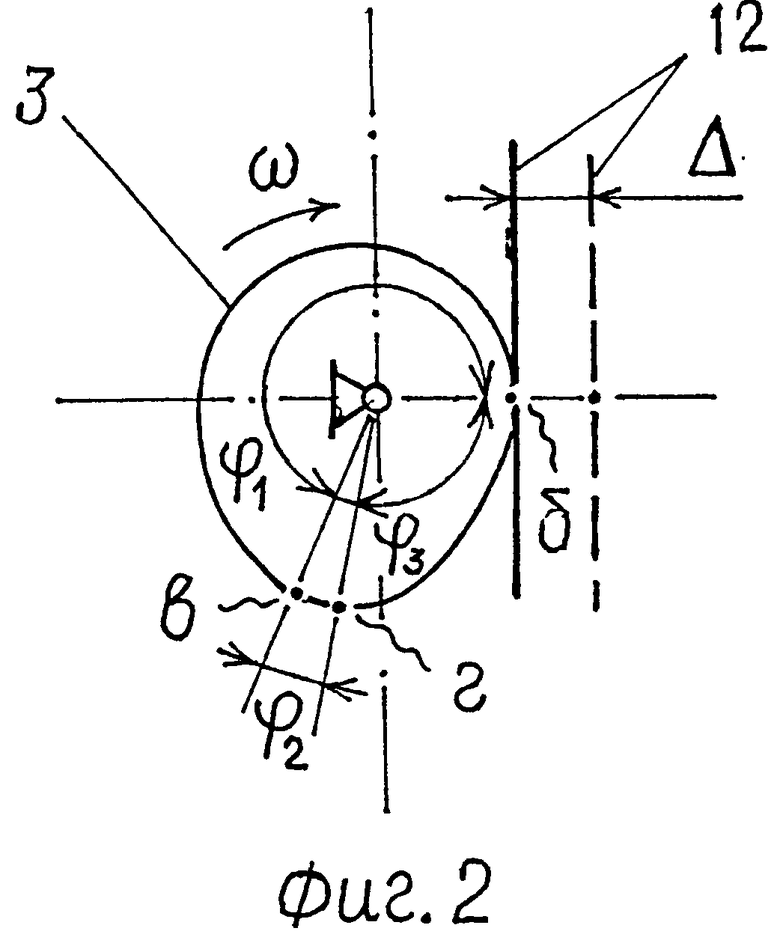
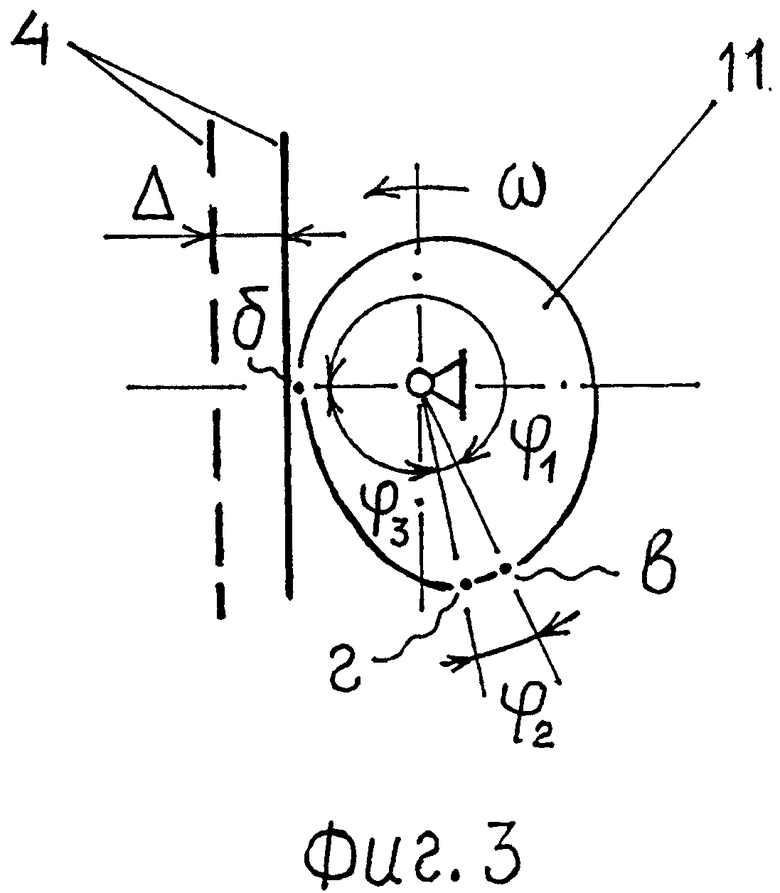
Показатель кинематического режима бокового движения решета при выравнивании слоя вороха при боковом движении решета вверх и вниз, равный 2,3, обеспечивается кулачком (Фиг.3 и Фиг.4) с профилем, выполненным с фазовыми углами поворота кулачка [3]: углом φ1 для движения решета вверх по крену, равным 240° (от точки «б» профиля кулачка контакта с толкателем до точки «в» для движения решета вверх по крену), углом φ2 - угол «покоя», равным 10° (от точки «в» профиля кулачка контакта с толкателем до точки «г»), углом φ3 - для движения решета и грохота вниз по крену, равным 110° (от точки «г» профиля кулачка контакта с толкателем до точки «б», т.е. с соотношением фазовых углов φ1:φ3, равным 2,3:1). Такое соотношение фазовых углов обеспечивает численное значение показателя кинематического режима бокового движения решета ε, равное 2,3 при боковых кренах до 16-18°.
Фазовые углы кулачка левого бокового крена изображены на Фиг.3, а для правого бокового крена на Фиг.4.
Значения критического бокового ускорения решета по боковому крену и показатели кинематического режима бокового движения решета при уборке некоторых культур в зависимости от угла бокового крена приведены в примерах 1, 2, 3.
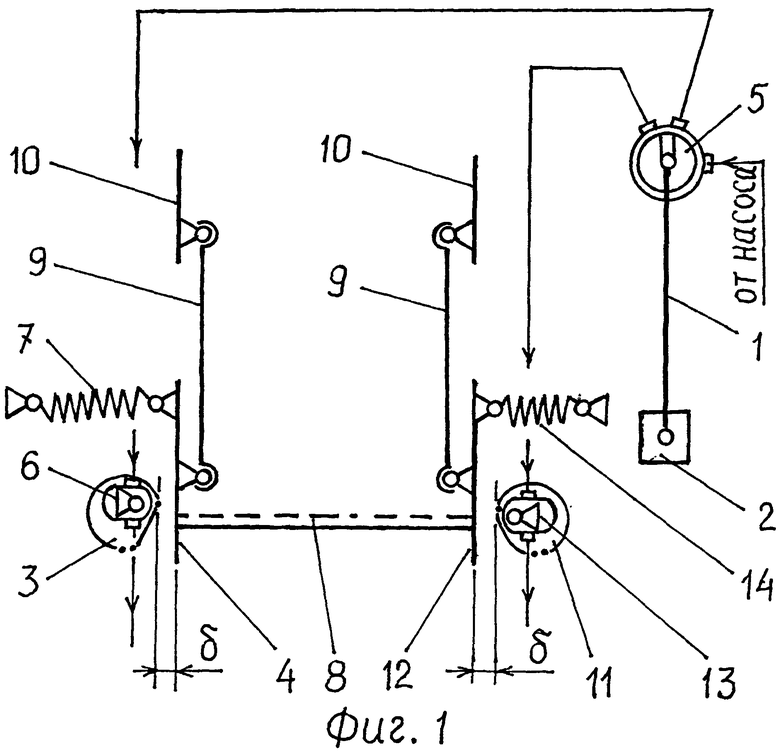
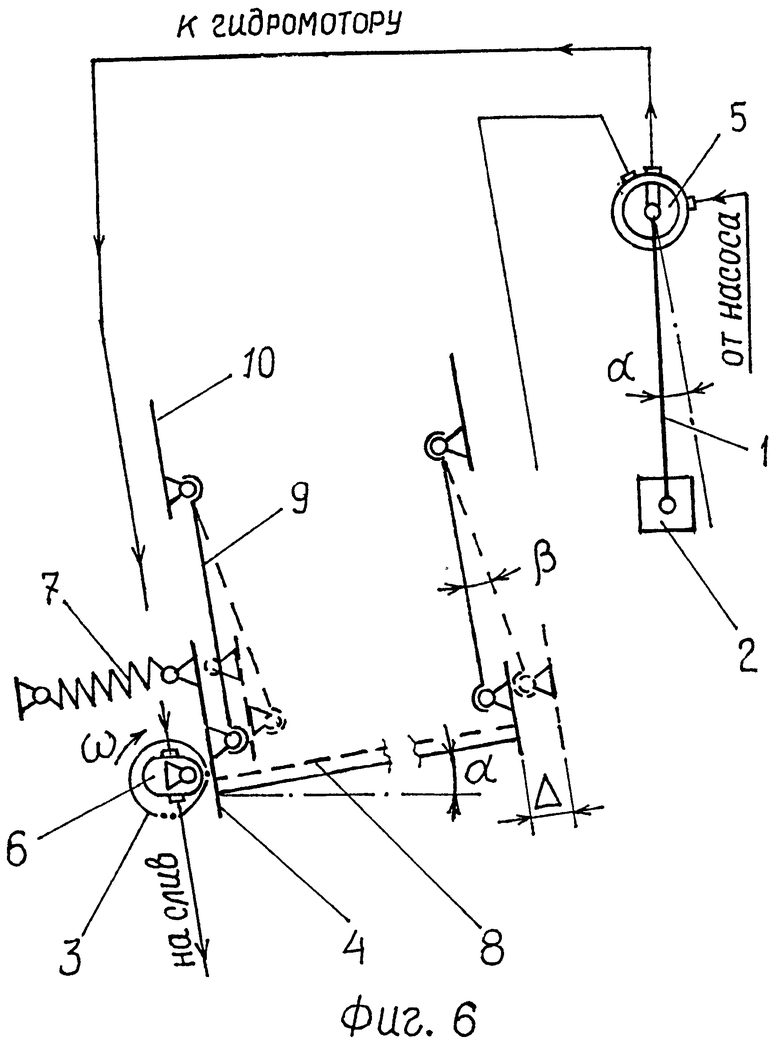
Кулачковое устройство (Фиг.5) зерноуборочного комбайна для динамического выравнивания слоя зернового вороха на решете при работе на склонах содержит автоматическую систему слежения за боковыми кренами комбайна, включающую рычаг 1, маятник 2, кулачок левого крена 3, кулачок правого крена 11, толкатели 4, 12, кран-дроссель 5, гидромотор левого крена 6, гидромотор правого крена 13, прижимные пружины 7, 14, решето 8, подвески 9, боковины 10 молотилки комбайна.
Описанная конструкция работает следующим образом.
При левом боковом крене комбайна рычаг 1 (Фиг.6) маятника 2 отклоняется от вертикали на угол α. Боковой крен обеспечивает первоначальный контакт профиля кулачка левого крена 3 с толкателем 4. Рычаг 1 маятника 2 поворачивает кран-дроссель 5, который открывает путь маслу от насоса гидросистемы к гидромотору левого крена 6. Гидромотор левого крена 6 вращает кулачок левого крена 3 по часовой стрелке, прижимная пружина 7 обеспечивает контакт профиля кулачка левого крена 3 с толкателем 4. При контакте профиля кулачка левого крена 3 с толкателем 4 от точки «б» профиля кулачка левого крена до точки «в» с фазовым углом поворота кулачка левого крена φ1 происходит равноускоренное боковое движение решета 8 вправо вверх по крену на величину Δ хода толкателя 4 благодаря шарнирной подвеске 9, отклоняющейся на угол β от боковины комбайна 10. Ускорение бокового движения решета 8 вправо вверх по крену менее критического. Зерновой ворох при этом движется вверх по крену совместно с решетом без проскальзывания на величину хода Δ толкателя 4. При дальнейшем вращении кулачка левого крена 3 от точки контакта «в» профиля кулачка левого крена до точки «г» с фазовым углом поворота кулачка левого крена φ2 боковое движение решета 8 не происходит. От точки контакта профиля кулачка левого крена «г» до точки контакта «б» с фазовым углом поворота кулачка левого крена φ3 решето 8 равноускоренно с численным значением больше критического возвращается влево вниз в исходное положение, при этом под действием силы инерции ворох остается вверху, а точка контакта «е» решета скользит по отношению к частице зернового вороха вниз на величину хода толкателя Δ. Частица зернового вороха остается в верхнем положении на решете, смещенная вверх по отношению к решету под действием силы инерции Р на величину хода толкателя Δ.
Так происходит выравнивание слоя зернового вороха на решете при левом боковом крене комбайна.
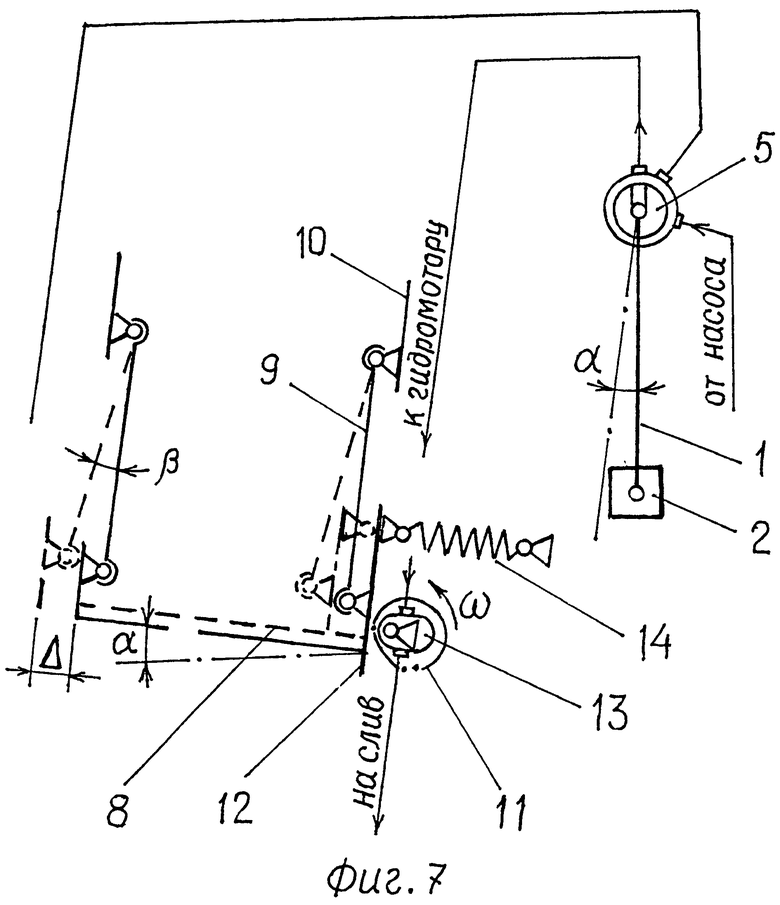
При правом боковом крене комбайна рычаг 1 (Фиг.7) маятника 2 отклоняется от вертикали на угол α. Боковой крен обеспечивает первоначальный контакт профиля кулачка правого крена 11 с толкателем 12. Рычаг 1 маятника 2 поворачивает кран-дроссель 5, который открывает путь маслу от насоса гидросистемы к гидромотору правого крена 13, который вращает кулачок правого крена 11 против часовой стрелки, прижимная пружина 14 обеспечивает контакт профиля кулачка правого крена 11 с толкателем 12. При контакте профиля кулачка правого крена 11 с толкателем 12 от точки «б» профиля кулачка 11 до точки «в» с фазовым углом поворота кулачка правого крена φ1 происходит равноускоренное боковое движение решета 8 влево вверх по крену на величину Δ благодаря шарнирной подвеске 9, отклоняющейся на угол β от боковины 10. Ускорение бокового движения решета 8 влево вверх по крену менее критического. Зерновой ворох при этом движется совместно с решетом без проскальзывания. При дальнейшем вращении кулачка правого крена 11 от точки контакта «в» до точки «г» с фазовым углом поворота кулачка правого крена φ2 боковое движение решета 8 не происходит. От точки контакта «г» профиля кулачка правого крена 11 до точки контакта «б» с фазовым утлом поворота кулачка правого крена φ3 решето 8 равноускоренно с численным значением больше критического возвращается вправо вниз в исходное положение, при этом под действием силы инерции Р зерновой ворох остается вверху, а точка контакта «е» решета скользит по отношению к частице зернового вороха право вниз на величину хода толкателя Δ. Частица зернового вороха остается в верхнем положении на решете, смещенная под действием силы инерции Р на величину хода толкателя Δ.
Так происходит выравнивание слоя зернового вороха на решете при правом боковом крене комбайна.
Синхронизация частоты боковых колебаний решета с величиной угла бокового крена достигается автоматически плавным изменением проходного сечения кран-дросселя 5 при отклонении маятника 2 от вертикали на угол α.
При работе комбайна без бокового крена кран-дроссель 5 находится в среднем (нейтральном) положении. В нейтральном положении находятся подвески 9 решет 8, кулачки 3 и 11 точками контакта «б» профиля кулачка 11 обращены в сторону толкателей 4 и 12 с зазором δ, равным 0,5 Δ хода толкателя. Масло от насоса гидросистемы при нейтральном положении кран-дросселя 5 не поступает в гидромоторы 3 и 13 привода кулачка, бокового движения решета 8 не происходит. Решето 8 совершает только продольные колебательные движения на подвесках 9, шарнирно закрепленных на боковине 10 комбайна, перемещая ровный слой зернового вороха в продольном направлении решета.
Достоверность доводов подтверждается нижеприведенными примерами.
Пример 1. Убираемая культура овес.
Из таблицы 1 видно, для выравнивания слоя зернового вороха на решете показатель кинематического режима бокового движения решета ε изменяется от 1,0 при отсутствии крена до 2,58 при крене 20°. Показатель кинематического режима бокового движения решета и грохота ε=2,3 кулачкового механизма обеспечивает выравнивание слоя зернового вороха пшеницы на очистке при боковом крене до 18°.
Пример 2. Убираемая культура пшеница.
Из таблицы 2 видно, для выравнивания слоя зернового вороха на решете показатель кинематического режима бокового движения решета ε изменяется от 1,0 при отсутствии крена до 4,3 при крене 25°. Показатель кинематического режима бокового движения решета ε=2,3 кулачкового механизма обеспечивает выравнивание слоя зернового вороха пшеницы на очистке при боковом крене до 16°.
Пример 3. Убираемая культура горох.
Как видно из таблицы 3, для выравнивания слоя зернового вороха на решете показатель кинематического режима бокового движения решета ε изменяется от 1,0 при отсутствии бокового крена до 1,2 при углах бокового крена комбайна 5°. Показатель кинематического режима бокового движения решета при ε=2,3 обеспечивает выравнивание слоя зернового вороха гороха на очистке при боковом крене до 5°.
Экономический эффект достигается за счет снижения потерь при уборке, улучшения чистоты зерна и повышения производительности комбайна. При годовой загрузке зерноуборочного комбайна «Акрос» или «Дон-1500» в 780 часов, коэффициенте использования сменного времени 0,7, производительности 14 т/ч и закупочной цене зерна 7500 руб/т экономический эффект на один зерноуборочный комбайн за сезон составляет 11,466 млн.руб.
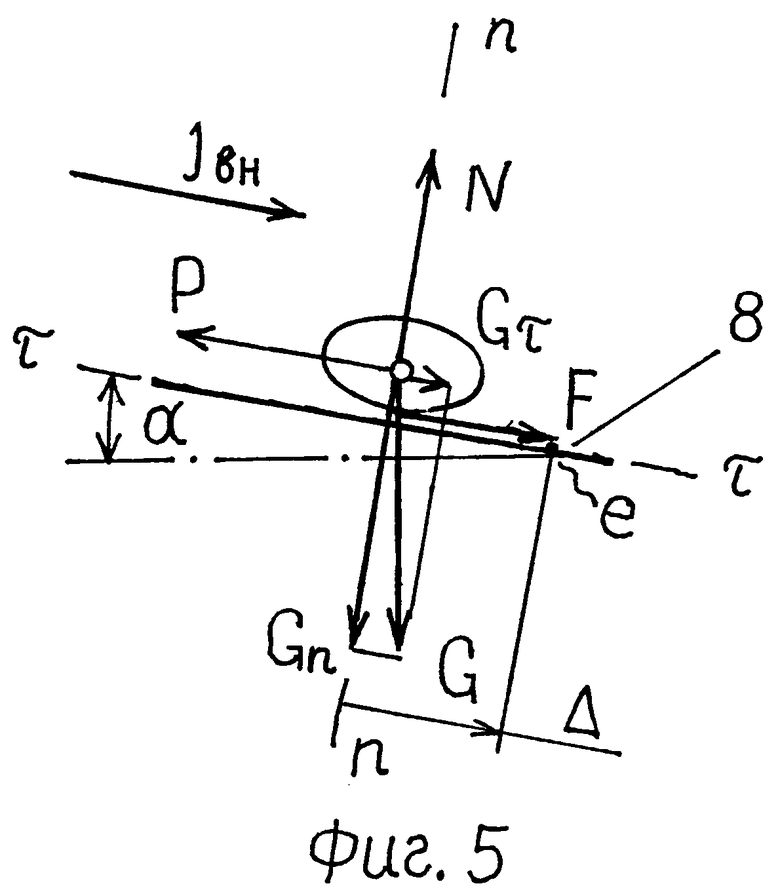
На фиг.1 изображена схема сил, действующих на частицу зернового вороха при движении решета вверх по боковому крену.
На фиг.2 представлена схема сил, действующих на частицу зернового вороха при движении решета вниз по боковому крену.
На фиг.3 представлена схема профиля кулачка левого бокового крена.
На фиг.4 приведена схема профиля кулачка правого бокового крена.
На фиг.5 изображена схема кулачкового устройства зерноуборочного комбайна для динамического выравнивания слоя зернового вороха на решете при работе на склонах.
На фиг.6 приведена схема работы кулачкового устройства зерноуборочного комбайна для динамического выравнивания слоя зернового вороха на решете при левом боковом крене.
На фиг.7 изображена схема работы кулачкового устройства зерноуборочного комбайна для динамического выравнивания слоя зернового вороха на решете при правом боковом крене.
На фигурах обозначения:
α - угол бокового крена комбайна;
β - угол бокового отклонения подвески решета при боковом крене комбайна;
jKP.ВВ - критическое боковое ускорение решета при движении его вверх по крену;
jKP.ВН - критическое боковое ускорение решета при движении его вниз по крену;
Δ - ход толкателя (путь бокового перемещения решета при боковом крене комбайна, амплитуда бокового колебания решета);
n-n - нормаль в точке взаимодействия частицы зернового вороха с решетом;
τ-τ - касательная в точке взаимодействия частицы зернового вороха с решетом;
G - сила тяжести частицы зернового вороха;
GN - нормальная составляющая силы тяжести частицы зернового вороха;
GT - касательная составляющая силы тяжести частицы зернового вороха;
NG - нормальная реакция решета от силы тяжести частицы зернового вороха;
Р - сила инерции частицы зернового вороха;
F - сила трения частицы зернового вороха о поверхность решета;
ε - показатель кинематического режима бокового движения решета при боковом крене комбайна;
φ1 - фазовый угол поворота кулачка от точки контакта «б» профиля кулачка с толкателем при крайнем левом положении решета до точки «г» начала «покоя» решета - это фазовый угол поворота кулачка при боковом движении решета «вверх», это фазовый угол совместного движения зернового вороха с решетом очистки;
φ2 - фазовый угол поворота кулачка от точки «г» контакта профиля кулачка с толкателем при крайнем правом положении решета до точки «б» контакта кулачка с толкателем при крайнем правом положении решета - это фазовый угол поворота профиля кулачка зоны «покоя» решета;
φ3 - фазовый угол поворота кулачка от точки «в» контакта профиля кулачка с толкателем при крайнем правом положении решета до точки «б» контакта профиля кулачка с толкателем при крайнем левом положении решета - это угол поворота кулачка при боковом движении решета «вниз» и скольжения решета очистки относительно частицы зернового вороха;
ω - угловая скорость вращения вала кулачка при боковом крене комбайна;
б - точка контакта кулачка с толкателем при крайнем левом положении решета левого бокового крена комбайна (при крайнем правом положении решета правого бокового крена комбайна);
в - точка контакта кулачка с толкателем при крайнем правом положении решета и точка начала «покоя» решета правого бокового крена комбайна (при крайнем левом положении решета левого бокового крена комбайна);
г - точка контакта кулачка с толкателем при крайнем правом положении решета в конце зоны «покоя» решета правого бокового крена комбайна (при крайнем левом положении решета левого бокового крена комбайна);
е - точка контакта решета с частицей зернового вороха;
δ - зазор между точками контакта «б» кулачков и толкателями решета при отсутствии бокового крена комбайна.
Осуществление изобретения
1-й этап. На предприятиях, выпускающих кулачковые валы, организовать производство кулачков левого и правого кренов с фазовыми углами, обеспечивающие значение показателя кинематического режима работы, равное 2,3.
2-й этап. Организовать выпуск нестандартных комплектующих деталей: рычаг, маятник, кран-дроссель, направляющие, ролики и пружины амортизаторов, например, на заводах НПО «Ростсельмаш» или других предприятиях.
3-й этап. Пусконаладочные работы, включающие сборку устройства, обкатку и испытания, доводку для устранения обнаруженных дефектов, допущенных при изготовлении и сборке.
4-й этап. Для осуществления изобретения необходимы инвестиции в размерах, значительно меньших, чем ожидаемый экономический эффект.
Экономический эффект достигается за счет снижения потерь при уборке, улучшения чистоты зерна и повышения производительности комбайна. При годовой загрузке зерноуборочного комбайна «Акрос» или «Дон-1500» в 780 часов, коэффициенте использования сменного времени 0,7, производительности 14 т/ч и закупочной цене зерна 7500 руб/т экономический эффект на один зерноуборочный комбайн за сезон составляет 11,466 млн. руб.
Источники информации
1. Патент ФРГ №3332763 по м. кл. A01D 41/12, 1985.
2. Патент РФ №2041594 С1 по м. кл. A01D 41/12, опубл. 20.08.95 (Бюл. №23).
3. Кожевников, С.Н. Механизмы. Справочник. Изд. 4-е перераб. и доп. / С.Н. Кожевников, Я.И. Есипенко, Я.М. Раскин. - М.: Машиностроение, 1976. - 784 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОГО ВЫРАВНИВАНИЯ СЛОЯ ВОРОХА НА ОЧИСТКЕ ЗЕРНОУБОРОЧНОГО КОМБАЙНА ПРИ РАБОТЕ НА СКЛОНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2519850C2 |
| Очистка зерноуборочного комбайна | 1985 |
|
SU1340644A1 |
| УСТРОЙСТВО ЗЕРНОУБОРОЧНОГО КОМБАЙНА ДЛЯ ВЫРАВНИВАНИЯ ПО ШИРИНЕ ЗЕРНОВОГО ВОРОХА НА РЕШЕТЕ ПРИ РАБОТЕ НА СКЛОНАХ | 1992 |
|
RU2041594C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2014 |
|
RU2554388C1 |
| МОЛОТИЛКА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1991 |
|
RU2015649C1 |
| КОМБАЙН САМОХОДНЫЙ ГУСЕНИЧНЫЙ ЗЕРНОУБОРОЧНЫЙ | 2010 |
|
RU2449529C2 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ЗЕРНОВОГО ВОРОХА НА РЕШЕТЕ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2007 |
|
RU2343686C1 |
| Устройство для распределения зернового вороха в очистке зерноуборочного комбайна | 1986 |
|
SU1414344A1 |
| Зерноуборочный комбайн | 1987 |
|
SU1417829A1 |
| РЕШЕТНЫЙ СТАН ОЧИСТКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1995 |
|
RU2095965C1 |
Изобретение относится к сельскохозяйственному машиностроению. Устройство зерноуборочного комбайна для динамического выравнивания слоя зернового вороха на решете очистки при работе на склонах содержит автоматическую систему слежения за боковыми кренами комбайна, гидромоторы, кулачки, прижимные пружины и толкатели. Решето очистки прикреплено к боковинам молотилки комбайна посредством подвесок. Система слежения за боковыми кренами комбайна включает маятник, соединенный рычагом с поворотным кран-дросселем. Кулачки правого и левого крена выполнены с фазовым углом поворота для обеспечения совместного движения вверх по крену зернового вороха с решетом очистки и с фазовым углом поворота для движения решета вниз по крену с относительным скольжением зернового вороха вверх по крену. Соотношение фазовых углов поворота кулачков при движении решета вверх и вниз по крену составляет 2,3:1. Использование изобретения обеспечивает выравнивание слоя зернового вороха по ширине решета и снижение потерь зерна. 7 ил., 3 табл., 3 пр.
1. Кулачковое устройство зерноуборочного комбайна для динамического выравнивания слоя зернового вороха на решете при работе на склонах, содержащее автоматическую систему слежения за боковыми кренами комбайна, включающую рычаг, маятник, соединенный с поворотным кран-дросселем, гидромоторы, кулачки, прижимные пружины, толкатели, решето, подвески, боковины молотилки комбайна, отличающееся тем, что для обеспечения показателя кинематического режима работы для выравнивания слоя зернового вороха на решете при работе на склонах при боковом движении решета вверх и вниз кулачок выполнен с фазовым углом поворота кулачка для совместного движения вверх зернового вороха с решетом очистки и с фазовым углом поворота кулачка для движения решета «вниз» с скольжением относительно зернового вороха в соотношении 2,3:1.
| УСТРОЙСТВО ЗЕРНОУБОРОЧНОГО КОМБАЙНА ДЛЯ ВЫРАВНИВАНИЯ ПО ШИРИНЕ ЗЕРНОВОГО ВОРОХА НА РЕШЕТЕ ПРИ РАБОТЕ НА СКЛОНАХ | 1992 |
|
RU2041594C1 |

