Изобретение относится к авиастроению и может быть применено в приводах подвижных аэродинамических поверхностей самолета, в частности предкрылков, закрылков, элеронов и др.
Известен электромеханический привод для вращательного движения (RU №108239 U1 от 09.06.2010), содержащий корпус, электродвигатель с ротором, расположенным внутри корпуса, и расположенный соосно электродвигателю двухступенчатый волновой редуктор с выходным валом, соединенным с приводимой деталью.
Известен электромеханический линейный привод (заявка WO №2010/072932 от 22.12.2008), используемый в качестве привода управления аэродинамической поверхностью самолета, состоящий из полого корпуса, в котором размещен реверсивный электродвигатель с полым ротором, имеющий внутреннюю винтовую канавку, концы которого опираются на установленные в корпусе подшипники. Внутри полого ротора размещен толкатель, часть поверхности которого имеет винтовую канавку, образующую с винтовой канавкой ротора винтовую передачу, преобразующую вращательное движение ротора в поступательное движение толкателя. На торце корпуса и на конце толкателя имеются цапфы, с помощью которых электромеханический линейный привод присоединяют к аэродинамической поверхности самолета.
Известны электромеханические линейные приводы (патент US №6202498 от 13.11.1998, заявка WO №2006/004681 от 30.06.2004), состоящие из корпуса, в котором размещен электродвигатель с полым ротором, имеющим внутреннюю винтовую канавку, концы которого опираются на установленные в корпусе радиально-упорные подшипники, а внутри полого ротора имеется толкатель, часть поверхности которого имеет винтовую канавку с шариками, образующая с винтовой канавкой ротора шарико-винтовую передачу. На одном из концов ротора установлен датчик его углового положения.
Недостатки данных электромеханических линейных приводов - в их повышенной массе и пониженном КПД вследствие использования электродвигателя с низкой частотой вращения ротора.
Известен электромеханический линейный привод с шарико-винтовой передачей (EAA-Kolloquium, 13.11.2008 - S. Romelt, EADS MAS) и с одноступенчатым зубчатым редуктором, размещенным между валом ротора реверсивного электродвигателя и вращаемой гайкой с внутренней винтовой канавкой. Недостатком зубчатых редукторов являются их увеличенные габариты.
Электромеханический линейный привод с винтовой передачей (патент US №4307799 от 29.12.1981 г.) состоит из корпуса с устройством крепления к неподвижной части приводимого агрегата; толкателя с устройством крепления к подвижной части приводимого агрегата; расположенных внутри корпуса электродвигателя с ротором, соединенным с вращающейся деталью винтового механизма, установленной в радиально-упорных подшипниках и присоединенной к выходному валу редуктора, а толкатель имеет стопор, исключающий его вращение относительно корпуса.
Известны электромеханические линейные приводы с винтовой передачей и с планетарным редуктором (GB №2141203 от 04.05.1983 г.), имеющие: корпус; расположенный внутри корпуса электродвигатель с ротором, установленным в подшипниках и соединенным с редуктором, соединенным с винтом винтового или шарико-винтового механизма; датчик положения ротора электродвигателя; толкатель с возможностью поступательного движения, соединенный с подвижной деталью приводимого агрегата.
Недостаток указанных электромеханических линейных приводов - увеличенные габариты и пониженный КПД.
Техническая задача изобретения - уменьшение габаритов и повышение КПД электромеханического линейного привода.
Техническая задача решена в электромеханическом линейном приводе управляемой аэродинамической поверхности самолета, состоящем из корпуса; расположенного внутри корпуса электродвигателя с ротором, установленным в подшипниках и соединенным через редуктор с винтом винтового или шарико-винтового механизма; датчика положения ротора электродвигателя; толкателя, размещенного в корпусе с возможностью поступательного движения и имеющего стопор, исключающий его вращение относительно корпуса; при этом редуктор является волновым, по меньшей мере, одноступенчатым и имеет размещенный на валу ротора волнообразователь, состоящий, по меньшей мере, из двух эксцентриков с противоположно направленными эксцентриситетами с установленными на них подшипниками и рабочими кольцами; охватывающий волнообразователь и соединенный с корпусом сепаратор с размещенными в нем промежуточными телами вращения, взаимодействующими с рабочими кольцами, охватывающее сепаратор жесткое колесо с внутренней волновой поверхностью, имеющее установленный соосно с ротором электродвигателя вал, соединенный с винтом непосредственно или через одну или несколько промежуточных ступеней.
Для уменьшения скорости линейного перемещения подвижной детали приводимого агрегата редуктор является двухступенчатым и имеет установленный на валу жесткого колеса второй волнообразователь; охватывающий второй волнообразователь и соединенный с корпусом сепаратор второй ступени с размещенными в нем промежуточными телами вращения, взаимодействующими с рабочими кольцами; жесткое колесо второй ступени с внутренней волновой поверхностью, охватывающее сепаратор и имеющее установленный соосно с ротором электродвигателя выходной вал, соединенный с винтом.
Для повышения надежности привода электродвигатель является бесколлекторным, постоянного тока, с регулируемой частотой вращения ротора.
Для уменьшения габаритов электромеханического привода максимальная частота вращения ротора электродвигателя находится в интервале 3000… 20000 мин-1.
Технический эффект - уменьшение габаритов устройства и повышение его КПД - достигается за счет совокупности новых признаков: редуктор является волновым, по меньшей мере, одноступенчатым и имеет размещенный на валу ротора волнообразователь, состоящий, по меньшей мере, из двух эксцентриков с противоположно направленными эксцентриситетами с установленными на них подшипниками и рабочими кольцами; охватывающий волнообразователь и соединенный с корпусом сепаратор с размещенными в нем промежуточными телами вращения, взаимодействующими с рабочими кольцами; охватывающее сепаратор жесткое колесо с внутренней волновой поверхностью, имеющее установленный соосно с ротором электродвигателя вал, соединенный с винтом непосредственно или через одну или несколько промежуточных ступеней.
Для уменьшения скорости линейного перемещения подвижной детали приводимого агрегата редуктор является двухступенчатым и имеет установленный на валу жесткого колеса второй волнообразователь; охватывающий второй волнообразователь и соединенный с корпусом сепаратор второй ступени с размещенными в нем промежуточными телами вращения, взаимодействующими с рабочими кольцами; жесткое колесо второй ступени с внутренней волновой поверхностью, охватывающее сепаратор и имеющее установленный соосно с ротором электродвигателя выходной вал, соединенный с винтом.
Отличительные признаки или признаки, им эквивалентные, не обнаружены в научно-технической и патентной информации, что свидетельствует о соответствии изобретения критерию «новизна».
Совокупность отличительных признаков не следует явно из уровня техники, поэтому изобретение соответствует критерию «изобретательский уровень».
На фиг.1 показана конструкция электромеханического линейного привода с одноступенчатым редуктором.
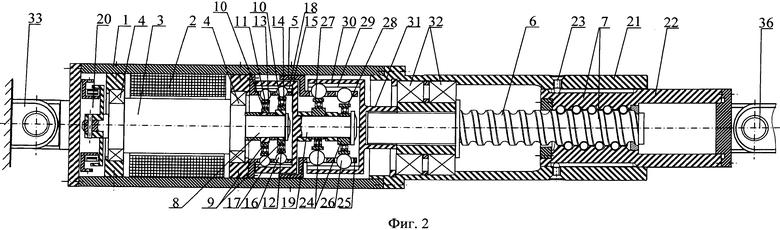
На фиг.2 показана конструкция электромеханического линейного привода с двухступенчатым редуктором.
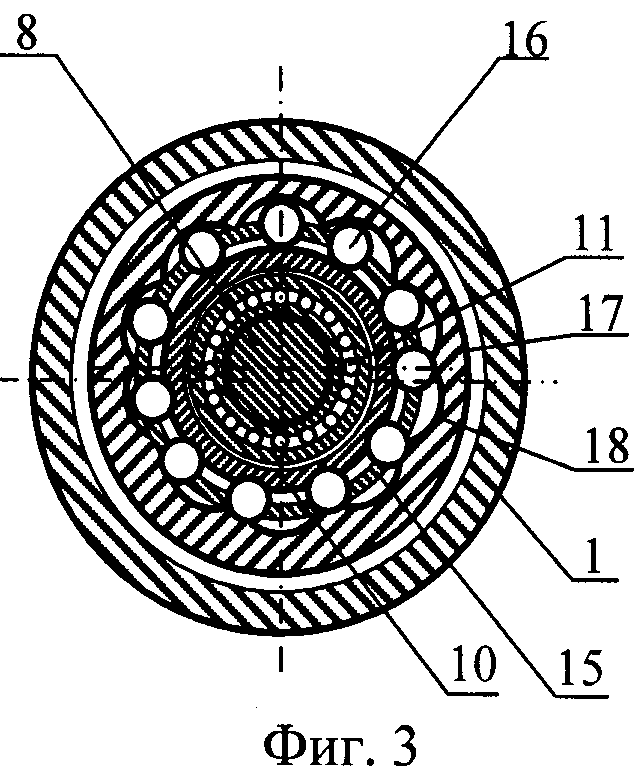
На фиг.3 - сечение А-А на фиг.1.
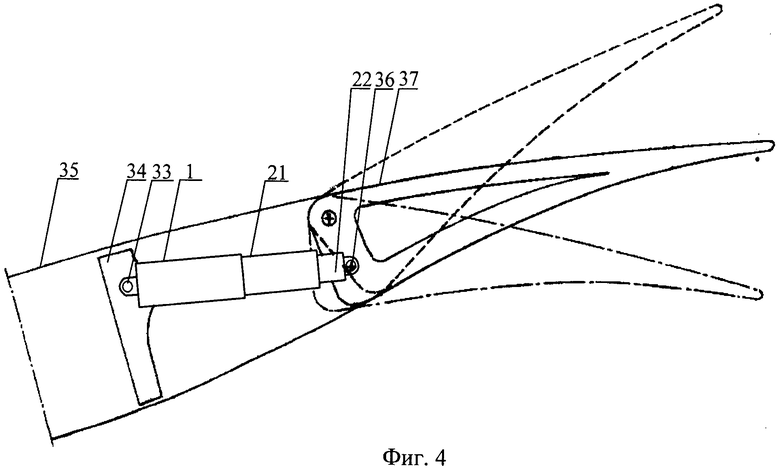
На фиг.4 - пример соединения электромеханического линейного привода с управляемой аэродинамической поверхностью.
Электромеханический линейный привод (фиг.1-3) состоит из корпуса 1 и расположенного внутри корпуса 1 электродвигателя 2 с ротором 3, установленным в подшипниках 4 и соединенным через волновой редуктор 5 с винтом 6 шарико-винтового механизма 7.
Волновой редуктор 5 является одноступенчатым (фиг.1) и имеет размещенный на валу 8 ротора 3 волнообразователь 9, состоящий, по меньшей мере, из двух эксцентриков 10 с противоположно направленными эксцентриситетами с установленными на них подшипниками 11 и 12 и рабочими кольцами 13 и 14; охватывающий волнообразователь 9 и соединенный с корпусом 1 сепаратор 15 с размещенными в нем промежуточными телами вращения 16, взаимодействующими с рабочими кольцами 13 и 14; охватывающее сепаратор 15 жесткое колесо 17 с внутренней волновой поверхностью 18. На жестком колесе 17 соосно с ротором 3 электродвигателя 2 имеется вал 19, соединенный с винтом 6. Вал 19 может соединяться с винтом 6 непосредственно или через одну (фиг.1) или несколько промежуточных ступеней волнового редуктора 5.
Ротор 3 соединен с датчиком 20 его углового положения.
В корпусе 21, соединенном с корпусом 1, с возможностью поступательного движения размещен толкатель 22, являющийся гайкой шарико-винтового механизма 7, и стопор 23, исключающий вращение толкателя 22 относительно корпуса 21.
Если редуктор 5 является двухступенчатым (фиг.2), то он имеет установленный на валу 19 жесткого колеса 17 второй волнообразователь 24; охватывающий второй волнообразователь 24 и соединенный с корпусом 1 сепаратор 25 второй ступени с размещенными в нем промежуточными телами вращения 26, взаимодействующими с рабочими кольцами 27 и 28; и внутренняя волновая поверхность 29 жесткого колеса 30 второй ступени, которое охватывает сепаратор 25 и имеет установленный соосно с ротором 3 электродвигателя 2 выходной вал 31, соединенный с винтом 6. Осевая сила, действующая на винт 6, воспринимается радиально-упорными подшипниками 32.
Для повышения надежности привода электродвигатель 2 является бесколлекторным, постоянного тока, с регулируемой частотой вращения ротора 3. Для уменьшения габаритов электромеханического привода максимальная частота вращения ротора 3 электродвигателя 2 находится в интервале 3000…20000 мин-1.
Электромеханический линейный привод (фиг.4) может использоваться для управляемых аэродинамических поверхностей. В этом случае его корпус 1 крепится посредством кронштейна 33 к неподвижной части 34 крыла 35, а толкатель 22 - посредством кронштейна 36 к управляемой аэродинамической поверхности 37.
При включении электродвигателя 2 привода с одноступенчатым волновым редуктором (фиг.1) момент от его ротора 3, закрепленного в подшипниках 4, через вал 8 волнообразователя 9 и сепаратор 15 волновой передачи и промежуточные тела вращения 16 передается на жесткое колесо 17 волновой передачи, затем в процессе вращения вала 19 и соединенного с ним винта 6 преобразуется в силу, действующую в осевом направлении на толкатель 22 и перемещающую его в направлении, зависящем от направления вращения ротора 3 электродвигателя 2. Толкатель 22 посредством детали 36 воздействует на приводимый агрегат 37 (фиг.4). Стопор 23 в продольной канавке толкателя 22 служит для ограничения выдвижения толкателя 22 относительно корпуса 21. Осевая сила, действующая на винт 6, воспринимается радиально-упорными подшипниками 32.
При включении электродвигателя 2 привода с двухступенчатым волновым редуктором (фиг.2) момент от его ротора 3, закрепленного в подшипниках 4, через вал 8 волнообразователя 9 и сепаратор 15 волновой передачи и промежуточные тела вращения 16 передается на жесткое колесо 17 волновой передачи, затем в процессе вращения вала 19 с закрепленным на нем волнообразователем 24 второй ступени через тела вращения 26 и жесткое колесо 30 с его валом 31 передается на винт 6, посредством которого преобразуется в силу, действующую в осевом направлении на толкатель 22 и перемещающую его в направлении, зависящем от направления вращения ротора 3 электродвигателя 2. Толкатель 22 посредством детали 36 воздействует на приводимый агрегат 37 (фиг.4). Стопор 23 в продольной канавке толкателя 22 служит для ограничения выдвижения толкателя 22 относительно корпуса 21. Осевая сила, действующая на винт 6, воспринимается радиально-упорными подшипниками 32.
Сигналы о положении ротора 3 регистрируются датчиком 20 положения ротора 3 электродвигателя 2 и передаются в систему управления (не показана).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА ДИСКОВОГО ТОРМОЗА КОЛЕСА ОСНОВНОЙ ОПОРЫ ШАССИ САМОЛЕТА | 2012 |
|
RU2522643C2 |
| Электромеханический привод | 2018 |
|
RU2722890C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРЕДКРЫЛКА САМОЛЕТА | 2012 |
|
RU2522635C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЗАКРЫЛКА САМОЛЕТА | 2012 |
|
RU2515014C2 |
| СПОСОБ РАСКРУТКИ-ТОРМОЖЕНИЯ КОЛЕС ШАССИ | 2015 |
|
RU2581996C1 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
Изобретение относится к авиастроению и может быть применено в приводах подвижных аэродинамических поверхностей самолета, в частности предкрылков, закрылков, элеронов. Электромеханический линейный привод состоит из корпуса, расположенного внутри него электродвигателя с ротором, соединенным через волновой редуктор с винтом винтового или шарико-винтового механизма. Внутри корпуса с возможностью поступательного движения размещен толкатель, а также стопор. Упомянутый ротор соединен с датчиком его углового положения. Волновой редуктор является одноступенчатым и имеет размещенный на валу ротора волнообразователь, состоящий из двух эксцентриков с противоположно направленными эксцентриситетами с установленными на них подшипниками и рабочими кольцами. В сепараторе, который соединен с корпусом и охватывает волнообразователь, размещены тела вращения, взаимодействующие с рабочими кольцами. Жесткое колесо с внутренней волновой поверхностью охватывает сепаратор и имеет установленный соосно с ротором электродвигателя вал, соединенный с винтом непосредственно или через одну или несколько промежуточных ступеней. Технический результат - уменьшение габаритов и повышение КПД привода. 3 з.п. ф-лы, 4 ил.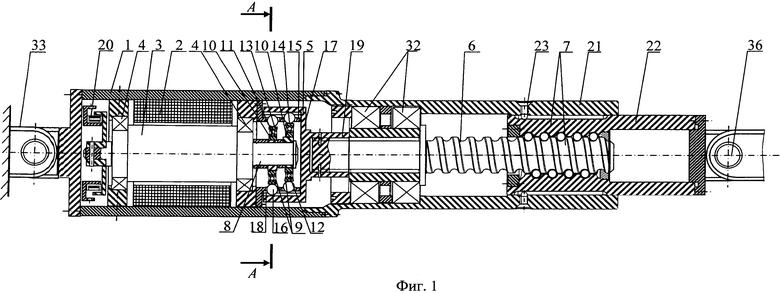
1. Электромеханический линейный привод, состоящий из корпуса; расположенного внутри корпуса электродвигателя с ротором, установленным в подшипниках и соединенным через редуктор с винтом винтового или шарико-винтового механизма; датчика положения ротора электродвигателя; толкателя, размещенного в корпусе с возможностью поступательного движения и имеющего стопор, исключающий его вращение относительно корпуса; отличающийся тем, что редуктор является волновым, по меньшей мере, одноступенчатым и имеет размещенный на валу ротора волнообразователь, состоящий, по меньшей мере, из двух эксцентриков с противоположно направленными эксцентриситетами с установленными на них подшипниками и рабочими кольцами; охватывающий волнообразователь и соединенный с корпусом сепаратор с размещенными в нем промежуточными телами вращения, взаимодействующими с рабочими кольцами; охватывающее сепаратор жесткое колесо с внутренней волновой поверхностью, имеющее установленный соосно с ротором электродвигателя вал, соединенный с винтом непосредственно или через одну или несколько промежуточных ступеней.
2. Устройство по п.1, отличающееся тем, что редуктор является двухступенчатым и имеет установленный на валу жесткого колеса второй волнообразователь; охватывающий второй волнообразователь и соединенный с корпусом сепаратор второй ступени с размещенными в нем промежуточными телами вращения, взаимодействующими с рабочими кольцами; жесткое колесо второй ступени с внутренней волновой поверхностью, охватывающее сепаратор и имеющее установленный соосно с ротором электродвигателя выходной вал, соединенный с винтом.
3. Устройство по п.1, отличающееся тем, что электродвигатель является бесколлекторным, постоянного тока, с регулируемой частотой вращения ротора.
4. Устройство по п.2, отличающееся тем, что максимальная частота вращения ротора электродвигателя находится в интервале 3000…20000 мин-1.
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| US 6152692 A, 28.11.2000 | |||
| US 6499690 B1, 31.12.2002 | |||
| Винтовой пресс | 1974 |
|
SU538902A1 |
| БИБЛИОГ[;ч.ДМ. Кл. G Olf 9/00УДК 681.124.07 (088.8) | 0 |
|
SU371442A1 |

