Изобретение относится к машиностроению, а именно к системе приводов автоматического управления, и предназначено для использования в системах управления аэродинамических поверхностей летательных аппаратов.
Известен силовой минипривод подвижной аэродинамической поверхности летательного аппарата, в корпусе которого размещена волновая передача с конкретными характеристиками [1]. Привод содержит электродвигатель, выходной вал которого через электромагнитную муфту соединен с входным валом волновой передачи, а выходным звеном волновой передачи является сепаратор, кинематически связанный с аэродинамической поверхностью.
Известен электромеханический минипривод поступательного действия [2], содержащий электродвигатель, электромагнитную муфту, промежуточную волновую передачу и выходную механическую передачу, выполненную в виде шариковинтовой передачи (ШВП) с сепаратором, в которой максимальное усилие, развиваемое штоком, зависит от числа тел качения.
Недостатком подобного рода конструкций приводов является ограниченность их применения - приводы сконструированы для конкретных задач с конкретными характеристиками.
Наиболее близким техническим решением является привод [3], строящийся из отдельных блоков: блока электродвигателя, блока промежуточного волнового редуктора и блока выходного волнового редуктора, при этом каждый блок имеет элементы крепления корпусов входных и выходных звеньев, так что блок электродвигателя может быть соединен с выходным блоком непосредственно или через блок промежуточного редуктора, а выходной блок может быть один или состоять из нескольких блоков.
Достоинство такого исполнения конструкции привода заключается в объединении нескольких блоков, что позволяет создавать различный выходной момент, зависящий от числа выходных блоков, и скорость, зависящую от наличия промежуточного редуктора.
Однако число вариантов значений создаваемых приводом моментов и скоростей ограничено числом выходных блоков и параметрами двигателя, что не позволяет использовать эти блоки для различных приводов разного назначения в одном летательном аппарате, например в приводах крыла самолета: предкрылков, закрылков, элеронов и др. В этих системах управления используются приводы с незначительно отличающимися мощностями, но с различным значением моментов и скоростей.
Основной задачей - целью, на решение которой направлено заявленное изобретение, является расширение области применения за счет создания высокоэффективных малогабаритных электромеханических приводов, обладающих простотой сборки, технологичностью изготовления, высокой ремонтопригодностью и низкой стоимостью.
Техническим результатом использования данного изобретения является построение высокоэффективного силового минипривода поступательного и вращательного действий из набора модулей с общим корпусом, каждый из которых собирается из элементов типового ряда.
Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении выполнен в виде набора модулей, снабженных элементами конструкции, позволяющими соединять их между собой и общим сборным корпусом, наружный диаметр которого равен наружному диаметру выходного модуля, при этом первым модулем является блок электродвигателей одного диаметра, включающий по крайней мере один бескорпусный электродвигатель с датчиком тока и положения ротора, второй модуль содержит электромагнитную муфту сцепления, двух- или трехпозиционную, третий модуль содержит промежуточную волновую передачу, четвертый выходной модуль выполнен в двух вариантах с вращательным движением выходного звена, в котором использована волновая передача с телами качения с оптимальным передаточным числом, при котором наружный диаметр передачи минимальный, либо с поступательным движением выходного звена в котором использована шариковинтовая передача, состоящая из набора корпусов и сепараторов с шариками и винтом, шаг которого обеспечивает наименьший наружный диаметр передачи, каждый выходной модуль снабжен датчиком положения выходного звена, а используемые в третьем и четвертом модулях волновые передачи с телами качения выполнены однотипными и представляют собой элементы размерного ряда волновых передач с телами качения, с различным числом тел качения в одном ряду и формой тел качения, при этом ротор электродвигателя, звенья электромагнитной муфты сцепления, ступени механических передач, промежуточная и выходная, с вращательным движением выходного звена выполнены с центральным внутренним отверстием.
Цель изобретения достигается тем, что он выполнен в виде набора модулей с общим корпусом, из которых первым модулем является блок электродвигателя(-ей) с датчиком(-ами) тока и положения ротора, выходным модулем является выходная силовая ступень механической передачи с датчиком положения выходного звена и двух промежуточных модулей, один из которых содержит электромагнитную муфту сцепления, а второй промежуточную механическую передачу. Все модули снабжены элементами конструкции, позволяющими соединять их между собой, и выполнены с одинаковым наружным диаметром, равным наружному диаметру выходного модуля. Передачи механические, преобразующие вращательное движение во вращательное, выполнены однотипными и представляют собой элементы размерного ряда волновых передач с телами качения, отличающиеся числом тел качения в одном ряду и формой тел качения, а первый модуль содержит один или набор однотипных бескорпусных электродвигателей одного диаметра.
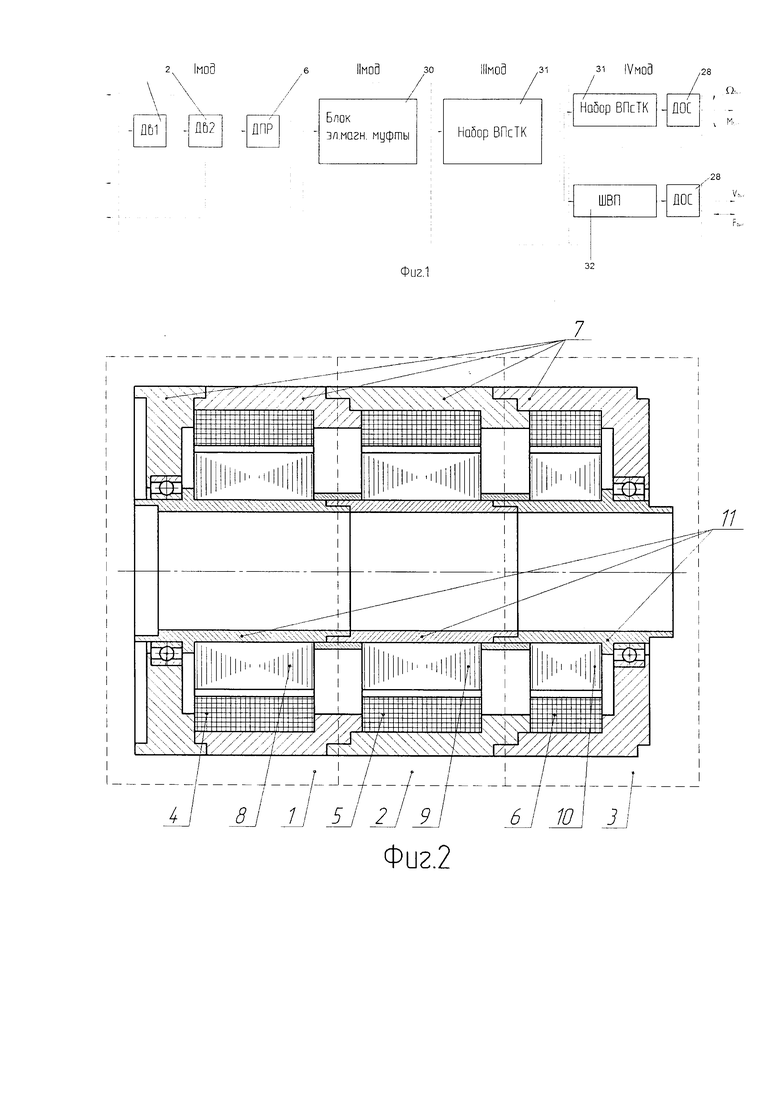
На фиг. 1 показана блок-схема электромеханического привода в модульном исполнении.
На фиг. 2 показана конструктивная схема соединения нескольких электродвигателей в единый модуль.
На фиг. 3 показана конструктивная схема двухпозиционной электромагнитной муфты.
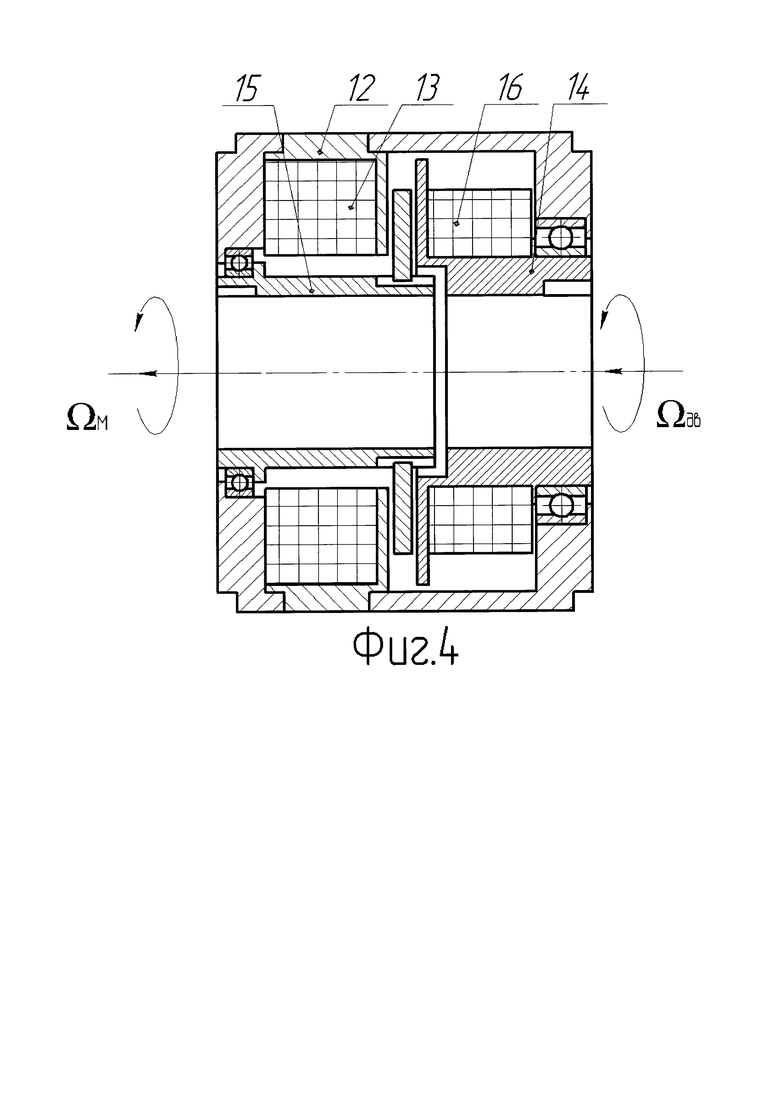
На фиг. 4 показана конструктивная схема трехпозиционной электромагнитной муфты.
На фиг. 5 показан набор однотипного ряда волновых передач с телами качения.
На фиг. 6 показано последовательное соединение волновых передач с телами качения из однотипного ряда для II модуля.
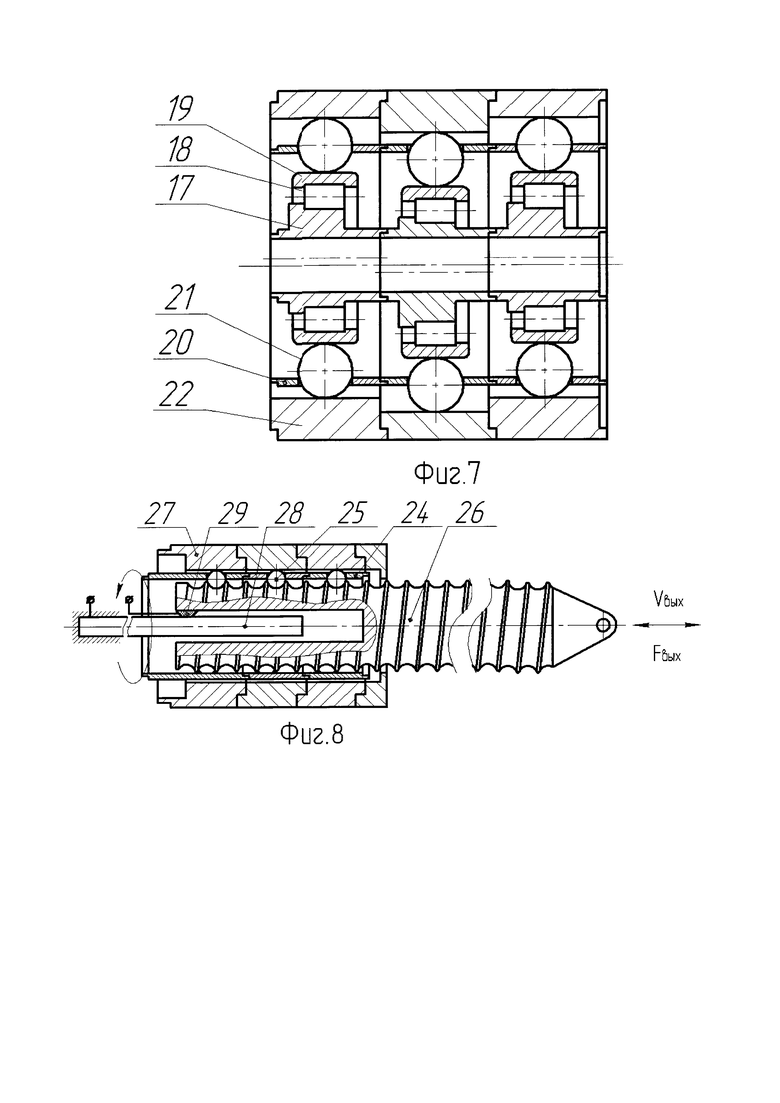
На фиг. 7 показано параллельное соединение волновых передач с телами качения из однотипного ряда для III и IV модулей.
На фиг. 8 показана конструктивная схема модуля передачи, преобразующей вращательное движение в поступательное.
Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении выполнен из набора четырех модулей, объединенных сборным общим корпусом.
I модуль - блок электродвигателей состоит из одного или набора бескорпусных высокомоментных электродвигателей ДВ 1(1) и ДВ2(2) с датчиками тока ДТ1 и ДТ2 (на фиг. 1, 2 не показаны) и общим датчиком положения ротора (ДПР).
В конструкции набора волновых передач с телами качения (ВПсТК фиг. 2) статоры электродвигателей с обмотками 4, 5 и датчик положения ротора 6 закреплены в корпусах 7, а роторы 8, 9 и 10 насажены на общий сборный пустотелый вал 11, установленный на подшипниках в корпусе 7. Элементы сборного корпуса 7 и сборного вала 11 снабжены элементами конструкции, позволяющими соединить их между собой и другими модулями II, III или IV, например, фланцевым соединением с центральным пояском.
II модуль - блок электромагнитной муфты сцепления 30, в который входит одна из муфт ряда, отличающихся наружным диаметром, моментом сцепления и числом позиций сцепления. Двухпозиционная муфта сцепления вала двигателя с входным валом модуля III или IV (фиг. 3) состоит из корпуса 12, в котором размещена обмотка управления 13, входной 14 и выходной 15 валы с центральными отверстиями. Трехпозиционная муфта (фиг. 4), позволяющая сцеплять входной вал модуля III или IV с валом электродвигателя, корпусом или обеспечивать им свободное вращение, состоит из корпуса 12, в котором размещены обмотки управления 13 и 16. В каждом блоке электромагнитной муфты корпус 12, входной 14 и выходной 15 валы снабжены элементами конструкции, позволяющими соединить их с другими модулями I, III или IV.
III модуль (фиг. 5) представляет собой блок механических передач, преобразующих вращательное движение ротора электродвигателя во вращательное движение входного вала IV модуля и обеспечивающих его требуемой скоростью на выходе.
В качестве механических передач используется набор волновых передач с телами качения, каждая из которых состоит из входного эксцентрикового вала 17 с центральным отверстием, на котором с помощью подшипника 18 размещен диск волнообразователя 19, сепаратора 20 с телами качения 21 - шариками или роликами (на фиг. 5 в качестве тел качения показаны шарики) и жесткого колеса 22 с внутренним профилем.
III модуль представляет собой набор волновых передач с телами качения (ВПсТК) 31, который набирается из ряда передач одинакового диаметра с различным числом и формой тел качения. Каждая волновая передача с телами качения снабжена элементами конструкции, позволяющими соединять их параллельно между собой и с другими модулями II и IV. В III модуле используется волновая передача по схеме с неподвижным жестким колесом, что позволяет использовать жесткое колесо как корпус. Для реализации требуемого передаточного числа в III модуле волновые передачи соединяются последовательно с помощью соединительного кольца 23, которое соединяет сепаратор 19 предыдущей волновой передачи с входным эксцентриковым валом 17 последующей передачи.
В III модуле волновые передачи могут соединяться как последовательно для реализации требуемого передаточного числа (фиг. 6), так и параллельно для обеспечения требуемого момента (фиг. 7).
IV модуль содержит датчик положения выходного звена и механические передачи, преобразующие вращательное движение выходного звена III модуля во вращательное или в поступательное движение и обеспечивает требуемый момент или усилие на выходном звене.
В качестве механических передач, преобразующих вращательное движение во вращательное, предлагается использовать волновые передачи с телами качения из того же ряда, что и волновые передачи, используемые в III модуле.
Учитывая, что волновые передачи с телами качения имеют оптимальное передаточное число qопт, при котором наружный диаметр передачи имеет минимальное значение [4], то для IV модуля используются передачи с qопт=9…20 и наружный диаметр всех остальных модулей I, II и III выбирается равным наружному диаметру IV модуля (наружный диаметр является определяющим для приводов аэродинамических поверхностей летательных аппаратов). Число волновых передач с телами качения в IV модуле определяется максимальным передаваемым моментом.
В IV модуле используются волновые передачи с телами качения по схеме с неподвижным сепаратором 20 и выходным жестким колесом 22, что позволяет использовать этот модуль и как подшипник качения опорного устройства объекта управления.
В качестве датчика положения выходного звена можно использовать датчик, измеряющий положение ротора электродвигателя или потенциометр, закрепленный на сепараторе.
В электромеханическом силовом миниприводе поступательного действия в IV модуле в качестве механической передачи, преобразующей вращательное движение выходного звена III модуля в поступательное движение, предлагается использовать шариковинтовую передачу 32 с сепаратором (фиг. 8) [2]. В этой передаче входным звеном является сепаратор 24 с шариками 25, выходным звеном - винт 26. Шарики 25 в сепараторе 24 расположены по винтовой линии, а внутренняя поверхность корпуса 27 гладкая цилиндрическая. Винт 26 выполнен пустотелым, внутри винта размещается линейка потенциометрического датчика обратной связи 28, жестко закрепленного с корпусом 27. Напряжение с датчика обратной связи 28 снимается с помощью токосъемника 29.
Усилие, развиваемое передачей, зависит от диаметров винта и числа шариков в сепараторе. Для реализации необходимого усилия в некотором диапазоне предлагается при одном диаметре винта с определенным шагом использовать набор сепараторов и корпусов разной длины и разным числом шариков.
Сепаратор и корпус снабжены элементами конструкции, позволяющими соединить их между собой и с I, II и III модулями.
Электромеханический силовой минипривод в модульном исполнении работает следующим образом. При подаче управляющего сигнала на обмотки 4, 5 электродвигателей 1, 2 роторы 8, 9 начинают вращать сборный вал 11, соединенный с входным валом 14 электромагнитной муфты, вхолостую.
При использовании двухпозиционной электромагнитной муфты и подачи управляющего сигнала на обмотку управления муфты 13 происходит сцепление входного 14 и выходного 15 валов электромагнитной муфты, при этом выходной вал 15 муфты вращает входной эксцентриковый вал 17 волновой передачи III модуля. При использовании трехпозиционной электромагнитной муфты и подаче управляющего сигнала на обмотки управления муфт 13, 16 происходит сцепление входного 14 и выходного 15 валов электромагнитной муфты, при этом выходной вал 15 муфты вращает входной эксцентриковый вал 17 волновой передачи III модуля. В зависимости от способа соединения волновых передач в модуле III передача вращающего момента может осуществляться либо последовательно, либо параллельно с использованием соединительного кольца 23, либо комбинированным (для случая, когда в наборе более двух передач) способом. При последовательном соединении, в результате вращения эксцентрикового вала 17 предыдущей передачи, тела качения 21 перекатываются по диску волнообразователя 19, обкатываясь по гладкой поверхности жесткого колеса 22, придавая тем самым вращение сепаратору 20, который соединен с входным эксцентриковым валом 17 последующей передачи с помощью соединительного кольца 23. При последовательном соединении скорость входного вала уменьшается в передаточное число раз. При параллельном соединении жесткие колеса 22, сепараторы 20 и эксцентриковые валы 17 обеих передач непосредственно соединены между собой, передавая момент, больший по сравнению с моментом, передаваемым одной передачей, на величину, увеличенную в число передач, подключенных параллельно. В случае, если в модуле объединено более двух передач, может применяться комбинированный способ соединения, который является комбинацией двух предыдущих способов. Вращательный момент на выходном звене промежуточного III модуля предается на входное звено выходного IV модуля. В зависимости от типа выходной передачи, передача момента осуществляется следующим образом. Для вращательного движения соединение модулей промежуточного и выходного каскадов происходит последовательным или параллельным способом, принцип работы здесь происходит аналогично с принципом передачи момента, характерного для вариантов соединения передач в III модуле, описанных ранее. Для поступательного движения вращающий момент на выходном звене промежуточного III модуля передается на входное звено шариковинтовой передачи, роль которого выполняет сепаратор 24 с определенным числом рядов шариков 25, в результате вращения которого шарики 25, проходя по каналам винта 26, создают усилие для поступательного перемещения винта 26, являющегося выходным звеном выходного IV модуля поступательного действия.
Датчик обратной связи 28 считывает информацию о положении выходного звена и передает ее в информационный блок управления.
Таким образом, технический результат достигается тем, что электромеханический силовой минипривод с требуемыми значениями момента (усилия), скорости и допустимого наружного диаметра собирается из четырех модулей, каждый из которых набирается из унифицированных элементов, объединенных общим сборным корпусом. При этом порядок набора модулей следующий: первым с минимальным или допустимым наружным диаметром набирается из унифицированных элементов выходной IV модуль так, чтобы его передаваемый суммарный момент или усилие были равны или превышали заданное максимальное значение; затем набирается I модуль из электродвигателей, обеспечивающих требуемую мощность, с корпусом, соответствующим диаметру корпуса IV модуля; далее набирается III модуль из элементов того же наружного диаметра так, чтобы общее передаточное число III и IV модулей обеспечивало при максимальной скорости электродвигателей I модуля максимальную угловую или линейную скорость IV модуля; последним выбирается II модуль в зависимости от функциональных задач и технических требований на привод.
В результате, имея возможность свободной компоновки привода из набора модулей, достигается гибкость применения данного привода в различных системах управления, а использование наборных модулей повышает ремонтопригодность систем и позволяет снизить стоимость на ее разработку и сборку.
Литература
1. Оболенский Ю.Г., Самсонович С.Л., Степанов B.C. Силовой минипривод подвижной аэродинамической поверхности летательного аппарата. Патент РФ №2408125. Опубл. 27.12.2010. Бюлл.№36, кл. Н02К 71/6, В64Д 31/4.
2. Борисов Н.В., Крылов Н.В., Самсонович С.Л., Степанов B.C., Огольцов И.И., Оболенский Ю.Г. Электромеханический минипривод поступательного действия. Патент РФ №2526366. Опубл. 20.06.2014. Бюлл. №23, кл. F16H 25/22.
3. Довгаленок В.М., Крылов Н.В., Левин А.В., Самсонович С.Л., Ситин Д.А., Степанов B.C., Мамаев Г.А., Фролов А.В., Грачев Д.С. Силовой минипривод петлеобразной формы. Патент РФ №2519612. Опубл. 20.06.2014. Бюлл. №17, кл. B64C 13/28, F16H 37/02, F16H 49/00.
4. Геращенко А.Н., Постников В.А., Самсонович С.Л. Пневматические, гидравлические и электрические приводы летательных аппаратов на основе волновых исполнительных механизмов. М.: изд-во МАИ-Принт, 2010, стр. 505, рис. 7.18.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Резервированный электромеханический привод | 2020 |
|
RU2736658C1 |
| Корпус электропривода трубопроводной арматуры и электропривод трубопроводной арматуры | 2024 |
|
RU2835273C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| Блок рулевых приводов ракеты или снаряда | 2020 |
|
RU2740978C1 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |


Изобретение относится к машиностроению, а именно к системе приводов автоматического управления. Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении выполнен в виде набора модулей с общим сборным корпусом. Первым модулем является блок электродвигателя(-ей) с датчиком(-ами) тока и положения ротора. Выходным модулем является выходная силовая ступень механической передачи с датчиком положения выходного звена. Промежуточных модулей два, один из которых содержит электромагнитную муфту сцепления, а второй - промежуточную механическую передачу. Модули снабжены элементами конструкции, позволяющими соединять их между собой, и выполнены с одинаковым наружным диаметром, равным наружному диаметру выходного модуля. Выходной модуль с вращательным движением выходного звена выполнен с оптимальным передаточным числом волновой передачи с телами качения, при котором наружный диаметр передачи минимальный. В выходном модуле с поступательным движением выходного звена использован винт, шаг которого обеспечивает наименьший наружный диаметр передачи. Достигается повышение ремонтопригодности. 8 ил.
Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении выполнен в виде набора модулей, снабженных элементами конструкции, позволяющими соединять их между собой и общим сборным корпусом, наружный диаметр которого равен наружному диаметру выходного модуля, при этом первым модулем является блок электродвигателей одного диаметра, включающий по крайней мере один бескорпусный электродвигатель с датчиком тока и положения ротора, второй модуль содержит электромагнитную муфту сцепления, двух- или трехпозиционную, третий модуль содержит промежуточную волновую передачу, четвертый выходной модуль выполнен в двух вариантах с вращательным движением выходного звена, в котором использована волновая передача с телами качения с оптимальным передаточным числом, при котором наружный диаметр передачи минимальный, либо с поступательным движением выходного звена, в котором использована шариковинтовая передача, состоящая из набора корпусов и сепараторов с шариками и винтом, шаг которого обеспечивает наименьший наружный диаметр передачи, каждый выходной модуль снабжен датчиком положения выходного звена, а используемые в третьем и четвертом модулях волновые передачи с телами качения выполнены однотипными и представляют собой элементы размерного ряда волновых передач с телами качения, с различным числом тел качения в одном ряду и формой тел качения, при этом ротор электродвигателя, звенья электромагнитной муфты сцепления, ступени механических передач, промежуточная и выходная, с вращательным движением выходного звена выполнены с центральным внутренним отверстием.
| RU 2012137639 A, 10.03.2014 | |||
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| DE 112010005656 T5, 21.03.2013 | |||
| US 5255882, 26.10.1993 | |||
| US 20130112806 A1, 09.05.2013. | |||

