Изобретение относится к области машиностроения и может быть применено в приводах автоматических систем управления летательных аппаратов, в частности, в качестве привода аэродинамических рулей.
Известны приводы подвижных аэродинамических поверхностей, использующие гидравлическую или электрическую энергию [1, 2]. Эти приводы содержат выходное звено, совершающее поступательное движение. Резервированные гидравлические приводы имеют спаренные гидроцилиндры с общим штоком [1], в резервированных электромеханических приводах резервируются электрические двигатели, движение которых при помощи дифференциала и промежуточного редуктора передается на шариковинтовую передачу, которая не резервируется [2].
Недостатком этих приводов является то, что исполнительные механизмы приводов занимают большой объем в неподвижной части летательного аппарата (например, в крыле, киле, неподвижном стабилизаторе), при этом ось выходного звена этих приводов (штока гидравлического цилиндра, винта шариковинтовой передачи) расположена со скрещиванием относительно оси вращения подвижной аэродинамической поверхности, что не позволяет разместить исполнительные механизмы этих приводов внутри подвижной аэродинамической поверхности. Кроме того, в известных электромеханических приводах резервирование осуществляется по принципу сложения скоростей, а не усилий, как в гидравлическом приводе.
Известен электромеханический силовой мини-привод (патент РФ №2321138 [3] - прототип) с вращательным характером движения выходного звена, состоящий из статора и ротора бескорпусного электрического двигателя, датчика положения выходного звена привода, выходной и промежуточной ступеней волновой передачи с телами качения, каждая из которых состоит из дискового волнообразователя, сепаратора с несколькими рядами гнезд, в которых размещены тела качения, и жесткого колеса, имеющего на внутренней цилиндрической поверхности специальный профиль. При этом сепараторы, жесткие колеса и волнообразователи ступеней волновых передач, статор и ротор электрического двигателя, элементы датчика положения выходного звена привода расположены концентрично относительно продольной оси привода. Конструкция такого силового мини-привода позволяет разместить его внутри подвижной аэродинамического поверхности.
Недостатком прототипа является ограниченная возможность его использования, т.к. вращательный характер движения выходного звена силового мини-привода позволяет использовать его для отклонения только тех подвижных аэродинамических поверхностей, ось вращения которых совпадает с продольной осью силового мини-привода. Такой силовой мини-привод невозможно применить для управления подвижной аэродинамической поверхностью, ось вращения которого параллельна продольной оси силового мини-привода и расположена вне объема подвижной аэродинамической поверхности. Кроме того, известный силовой мини-привод не может быть выполнен резервированным, т.к. при использовании нескольких силовых мини-приводов, располагаемых на одной оси, отказ электрического двигателя одного из силовых мини-приводов выводит из строя управление подвижной аэродинамической поверхностью.
Цель изобретения - создание силового мини-привода, обеспечивающего управление подвижной аэродинамической поверхностью, ось вращения которой расположена вне объема подвижной аэродинамической поверхности, а также повысить надежность управления подвижной аэродинамической поверхностью за счет резервирования силовых мини-приводов по принципу сложения усилий.
Цель изобретения достигается тем, что силовой мини-привод подвижной аэродинамической поверхности летательного аппарата, содержащий корпус, внутри которого соосно вдоль продольной оси силового мини-привода размещены бескорпусный электрический двигатель, состоящий из статора и ротора, закрепленного на валу, одно- или многоступенчатая волновая передача с телами качения и датчик положения выходного звена одно- или многоступенчатой волновой передачи с телами качения, снабжен втулкой, закрепленной на торцевой поверхности выходного звена одно- или многоступенчатой волновой передачи с телами качения эксцентрично относительно продольной оси силового мини-привода, и тягой с проушинами на концах, одна из которых надета на втулку с возможностью вращения вокруг оси втулки, а вторая предназначена для крепления к неподвижной части летательного аппарата, при этом корпус силового мини-привода снабжен элементом крепления к подвижной аэродинамической поверхности таким образом, что продольная ось силового мини-привода ориентирована параллельно оси поворота подвижной аэродинамической поверхности летательного аппарата, а между валом ротора и ведущим звеном одно- или многоступенчатой волновой передачи с телами качения дополнительно установлена электромагнитная муфта.
Таким образом, снабжением выходного звена силового мини-привода втулкой, расположенной эксцентрично относительно его продольной оси, и обеспечением элементами крепления параллельности продольной оси силового мини-привода с осью вращения подвижной аэродинамической поверхности достигается управление этой поверхностью при расположении ее оси вращения вне объема подвижной аэродинамической поверхности. Кроме того, введение электромагнитной муфты указанным способом повышает надежность управления подвижной аэродинамической поверхностью за счет возможности использования силовых мини-приводов в резервированных системах.
На фиг.1 показано продольное сечение силового мини-привода с электромагнитной муфтой.
На фиг.2 показана кинематическая схема соединения силового мини-привода с подвижной аэродинамической поверхностью и неподвижной частью летательного аппарата (крылом) при нейтральном положении подвижной аэродинамической поверхности.
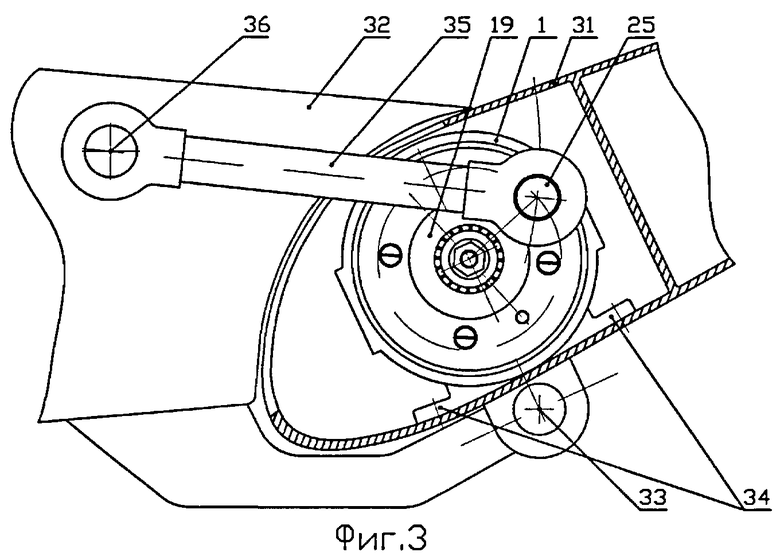
На фиг.3 показана кинематическая схема соединения силового мини-привода с подвижной аэродинамической поверхностью и неподвижной частью летательного аппарата (крылом) при отклоненном вверх на максимальный угол положении подвижной аэродинамической поверхности.
На фиг.4 показана кинематическая схема соединения силового мини-привода с подвижной аэродинамической поверхностью и неподвижной частью летательного аппарата (крылом) при отклоненном вниз на максимальный угол положении подвижной аэродинамической поверхности.
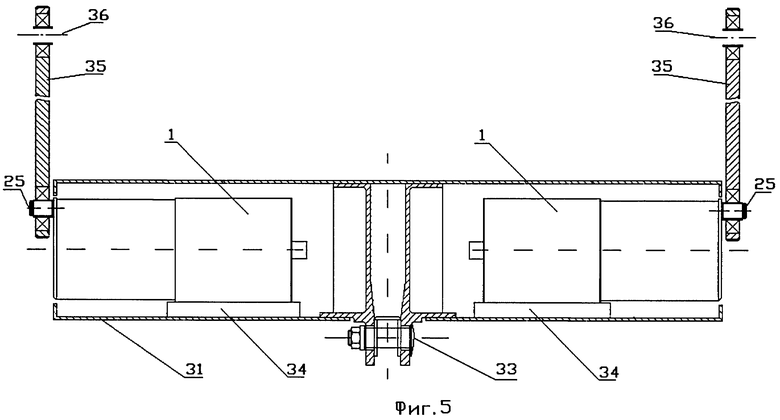
На фиг.5 показано размещение нескольких резервированных силовых мини-приводов внутри подвижной аэродинамической поверхности (тяги условно повернуты на 90°).
Силовой мини-привод подвижной аэродинамической поверхности включает корпус 1, электрический двигатель, две ступени волновой передачи с телами качения, датчик положения выходного звена волновой передачи с телами качения (см. фиг.1). Кроме того, силовой мини-привод подвижной аэродинамической поверхности снабжен электромагнитной муфтой, размещенной между электрическим двигателем и волновой передачей с телами качения.
Электрический двигатель выполнен бескорпусным и состоит из статора 2, ротора 3 и жестко закрепленного к ротору 3 вала 4 электрического двигателя. Вал 4 электрического двигателя базируется относительно корпуса 1 при помощи подшипников 5. Электромагнитная муфта состоит из ведущего звена 6, закрепленного на валу 4 электрического двигателя, управляющей обмотки 7, подвижного диска 8 и ведомого звена 9.
Промежуточная ступень волновой передачи с телами качения содержит дисковый волнообразователь, жесткое колесо 10 с внутренней профилированной поверхностью, являющееся выходным звеном промежуточной ступени волновой передачи с телами качения, сепаратор 11, неподвижно прикрепленный к корпусу 1 и имеющий несколько рядов гнезд, в которых расположены тела качения 12. Дисковый волнообразователь промежуточной ступени волновой передачи с телами качения состоит из эксцентриков 13, подшипников 14 и дисков 15, при этом эксцентрики 13 закреплены неподвижно относительно ведомого звена 9 электромагнитной муфты, вместе с которым при помощи подшипников 16 и 17 базируются относительно неподвижных элементов привода.
Выходная ступень волновой передачи с телами качения содержит дисковый волнообразователь, жесткое колесо 18 с внутренней профилированной поверхностью, неподвижно прикрепленное к корпусу 1, сепаратор 19, имеющий несколько рядов гнезд, в которых расположены тела качения 20. Дисковый волнообразователь выходной ступени волновой передачи с телами качения состоит из эксцентриков 21, подшипников 22 и дисков 23, при этом эксцентрики 21 закреплены неподвижно относительно жесткого колеса 10 промежуточной ступени волновой передачи с телами качения, вместе с которым при помощи подшипников 24 базируются относительно неподвижных элементов привода. На торце сепаратора 19, являющегося выходным звеном привода, закреплена эксцентричная втулка 25. Сепаратор 19 базируется относительно неподвижных элементов привода при помощи подшипников 26 и 27.
Датчик положения выходного звена волновой передачи с телами качения содержит статор 28 с обмотками и ротор 29, при этом статор 28 крепится к неподвижным элементам привода, ротор 29 крепится к сепаратору 19.
На корпусе силового мини-привода закреплен электрический разъем 30, контакты которого соединены с обмотками электрического двигателя, электромагнитной муфты и датчика положения выходного звена волновой передачи с телами качения.
Подвижная аэродинамическая поверхность 31 закреплена к неподвижной части летательного аппарата (например, к крылу) 32 с возможностью углового отклонения относительно оси 33 (см. фиг.2, 3, 4, 5). Корпус 1 силового мини-привода жестко закреплен к подвижной аэродинамической поверхности 31 при помощи элементов крепления 34 так, что продольная ось силового мини-привода ориентирована параллельно оси 33 поворота подвижной аэродинамической поверхности 31.
Тяга 35 имеет на концах проушины, одна из которых крепится к эксцентричной втулке 25 с возможностью вращения относительно ее оси, а проушина на другом конце тяги 35 соединена с неподвижной частью летательного аппарата 32 с возможностью вращения относительно оси 36 (на фиг.5 тяга 35 условно повернута на 90°).
Силовой мини-привод подвижной аэродинамической поверхности работает следующим образом.
При подаче напряжения на обмотки статора 2 электродвигателя (см. фиг.1) приводится в движение ротор 3 электродвигателя, вал 4 электрического двигателя и соединенное с ним ведущее звено 6 электромагнитной муфты. Ток в управляющей обмотке 7 электромагнитной муфты создает силу, прижимающую подвижный диск 8 к ведущему звену 6 электромагнитной муфты. Подвижный диск 8 передает вращение ведущего звена 6 ведомому звену 9 электромагнитной муфты.
Ведомое звено 9 электромагнитной муфты передает вращение эксцентрикам 13 промежуточной ступени волновой передачи с телами качения. Смещенные оси эксцентриков 13 и совпадающие с ними оси подшипников 14 и дисков 15 совершают за один оборот ведомого звена 9 электромагнитной муфты полный оборот вокруг продольной оси силового мини-привода. Сепаратор 11 позволяет телам качения 12 перемещаться только в радиальном направлении, таким образом тела качения 12 под воздействием движения дисков 15 совершают волнообразные движения с периодом, равным периоду одного оборота ведомого звена 9 электромагнитной муфты и амплитудой, равной расстоянию между продольной осью силового мини-привода и осью эксцентриков 13. Тела качения 12, взаимодействуя с внутренней профилированной поверхностью жесткого колеса 10, поворачивают его на угол, меньший угла поворота ведомого звена 9 электромагнитной муфты в число раз, равное числу периодов внутренней профилированной поверхности жесткого колеса 10.
Жесткое колесо 10 передает движение на эксцентрики 21 выходной ступени волновой передачи с телами качения. Смещенные оси эксцентриков 21 и совпадающие с ними оси подшипников 22 и дисков 23 совершают за один оборот жесткого колеса 10 промежуточной ступени волновой передачи с телами качения полный оборот вокруг продольной оси силового мини-привода. Сепаратор 19 позволяет телам качения 20 перемещаться в гнездах в радиальном направлении, таким образом тела качения 20 под воздействием движения дисков 23 совершают сложное движение, являющееся совокупностью вращательного движения сепаратора 19 и волнообразного движения вдоль гнезд сепаратора 19 с амплитудой, равной расстоянию между продольной осью силового мини-привода и осью эксцентриков 21. Тела качения 20, взаимодействуя с внутренней профилированной поверхностью жесткого колеса 18, поворачивают сепаратор 19 на угол, меньший угла поворота жесткого колеса 10 промежуточной ступени волновой передачи с телами качения в число раз, на единицу меньшее числа периодов внутренней профилированной поверхности жесткого колеса 18.
Поворот сепаратора 19 вызывает поворот неподвижно связанного с ним ротора 29 датчика положения выходного звена волновой передачи с телами качения. Напряжение сигнальной обмотки статора 28 датчика положения выходного звена волновой передачи с телами качения содержит информацию об угле поворота сепаратора 19.
Поворот сепаратора 19 вызывает поворот относительно продольной оси силового мини-привода эксцентричной втулки 25 и связанной с ней тяги 35, что вызывает поворот корпуса 1 силового мини-привода вместе с подвижной аэродинамической поверхностью 31 относительно ее оси вращения 33 (см. фиг.2, 3, 4, 5). В случае установки нескольких силовых мини-приводов для управления одной подвижной аэродинамической поверхностью вращающие моменты каждого силового мини-привода передаются через их корпуса 1 на подвижную аэродинамическую поверхность 31 и на ней складываются.
Радиальная нагрузка на эксцентричную втулку 25 передается на сепаратор 19 и через подшипники 26 и 27 передается на корпус силового мини-привода.
При установке нескольких силовых мини-приводов подвижной аэродинамической поверхности (с целью резервирования) в случае отказа одного из силовых мини-приводов обесточивается управляющая обмотка 7 электромагнитной муфты, и подвижный диск 8 размыкает контакт с ведущим звеном 6 электромагнитной муфты. Таким образом, возможный отказ электродвигателя не препятствует свободному вращению ведомого звена 9 электромагнитной муфты. Отклонение подвижной аэродинамической поверхности 31 при помощи функционирующих силовых мини-приводов передается тягой 35 на эксцентричную втулку 25 и вызывает поворот сепаратора 19 выходной ступени волновой передачи с телами качения, далее в обратном направлении от сепаратора 19 к жесткому колесу 10 промежуточной ступени волновой передачи с телами качения и от жесткого колеса 10 к ведомому звену 9 электромагнитной муфты. Таким образом, отказавший силовой мини-привод подвижной аэродинамической поверхности не нагружает функционирующие.
Таким образом, предлагаемый силовой мини-привод обеспечивает управление подвижной аэродинамической поверхностью, ось вращения которой расположена вне объема этой подвижной аэродинамической поверхности, за счет выполненной на торцевой поверхности выходного звена силового мини-привода эксцентричной относительно продольной оси силового мини-привода втулки, к которой с возможностью вращения прикреплена тяга, при этом другой конец тяги снабжен элементами крепления к силовому элементу неподвижной части летательного аппарата, а корпус силового мини-привода жестко прикреплен к силовым элементам подвижной аэродинамической поверхности летательного аппарата.
Кроме того, предлагаемый силовой мини-привод повышает надежность управления подвижной аэродинамической поверхностью за счет введения между валом ротора электрического двигателя и ведущим звеном волновой передачи с телами качения электромагнитной муфты, которая рассоединяет отказавший двигатель силового мини-привода от волновой передачи с телами качения, позволяя функционирующим силовым мини-приводам управлять подвижной аэродинамической поверхностью, при этом вращающие моменты каждого силового мини-привода передаются на подвижную аэродинамическую поверхность и складываются на ней, реализуя резервирование силовых мини-приводов по принципу сложения усилий.
Ссылки
1. Редько П.Г., Борцов А.А., Тычкин О.В. и др. Электрогидромеханический привод. Патент РФ №2191138. Опубл. Бюлл. №29 за 2002 г.
2. Stephen С.Jensen, Gavin D. Jenney, Bruce Raymond, David Dawson. Flight Test Experience With an Electromechanical Actuator on the F-18 Systems Research Aircraft. Presented at the 19th Digital Avionics Systems Conference, October 7-13, 2000, Philadelphia, Pennsylvania, USA.
3. Самсонович С.Л., Степанов B.C., Урсу В.Е., Шендрик С.В. Силовой мини-привод. Патент РФ №2321138. Опубл. Бюлл. №9 за 2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ МИНИ-ПРИВОД УПРАВЛЕНИЯ ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА С ФУНКЦИЕЙ СКЛАДЫВАНИЯ И РАСКРЫТИЯ СЕКЦИИ КРЫЛА | 2014 |
|
RU2565861C1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| Резервированный электромеханический привод | 2020 |
|
RU2736658C1 |


Изобретение относится к электротехнике и может быть применено в приводах автоматических систем управления летательных аппаратов, в частности, в качестве привода аэродинамических рулей. Технический результат состоит в обеспечении управления подвижной аэродинамической поверхностью, ось вращения которой расположена вне объема подвижной аэродинамической поверхности, а также повышении надежности управления за счет резервирования силовых мини-приводов по принципу сложения усилий. Силовой мини-привод содержит корпус (1), внутри которого соосно вдоль продольной оси размещены бескорпусный электрический двигатель, состоящий из статора (2) и ротора (3), закрепленного на валу (4). Имеются волновая передача с телами качения либо одноступенчатая, в которой используется только выходная ступень (18), либо многоступенчатая, в которой используется выходная ступень (18), и промежуточная ступень 10. Датчик положения состоит из статора (28) и ротора (29), установленного на выходном звене (19) волновой передачи. На торцевой поверхности выходного звена (19) одно- или многоступенчатой волновой передачи с телами качения эксцентрично относительно продольной оси закреплена втулка (25) с тягой (35). Тяга (35) имеет проушины на концах, одна из которых надета на втулку (25) с возможностью вращения вокруг оси втулки, а вторая предназначена для крепления к неподвижной части (32) летательного аппарата. Корпус (1) снабжен элементом крепления (34) к подвижной аэродинамической поверхности (31) таким образом, что продольная ось ориентирована параллельно оси поворота (33) подвижной аэродинамической поверхности (31) летательного аппарата. 1 з.п. ф-лы, 5 ил.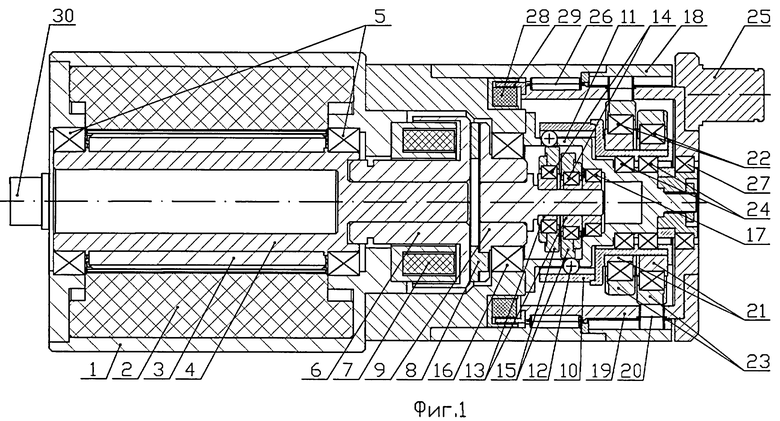
1. Силовой мини-привод подвижной аэродинамической поверхности летательного аппарата, содержащий корпус, внутри которого соосно вдоль продольной оси силового мини-привода размещены бескорпусный электрический двигатель, состоящий из статора и ротора, закрепленного на валу, одно- или многоступенчатая волновая передача с телами качения и датчик положения выходного звена одно- или многоступенчатой волновой передачи с телами качения, отличающийся тем, что он снабжен втулкой, закрепленной на торцевой поверхности выходного звена одно- или многоступенчатой волновой передачи с телами качения эксцентрично относительно продольной оси силового мини-привода, и тягой с проушинами на концах, одна из которых надета на втулку с возможностью вращения вокруг оси втулки, а вторая предназначена для крепления к неподвижной части летательного аппарата, при этом корпус силового мини-привода снабжен элементом крепления к подвижной аэродинамической поверхности таким образом, что продольная ось силового мини-привода ориентирована параллельно оси поворота подвижной аэродинамической поверхности летательного аппарата.
2. Силовой мини-привод подвижной аэродинамической поверхности летательного аппарата по п.1, отличающийся тем, что между валом ротора и ведущим звеном одно- или многоступенчатой волновой передачи с телами качения дополнительно установлена электромагнитная муфта.
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| ВОЛНОВОЙ ПРИВОД И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 1999 |
|
RU2165044C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |
| Электропривод | 1976 |
|
SU663028A1 |
| US 5901801 А, 11.05.1999 | |||
| Механизм свободного хода | 1978 |
|
SU697759A1 |

