Настоящая заявка притязает на преимущество и приоритет: предварительной патентной заявки США, серийный номер 61/140,271, поданной 23 декабря 2008 г.; (2) предварительной патентной заявки США, серийный номер 61/154,024, поданной 20 февраля 2009 г.; и (3) предварительной патентной заявки США №61/264,687, поданной 26 ноября 2009 г., содержание которых включено в настоящий документ путем ссылки.
Область техники
Настоящее описание относится к системе и устройству из нескольких катушек приемников для геофизической разведки.
Уровень техники
Способы геофизической электромагнитной разведки могут быть эффективны для определения удельной электропроводности грунтов, скальных пород и других тел на и под поверхностью земли.
Геофизическая электромагнитная разведка может проводиться с использованием наземного оборудования и бортового оборудования летательного аппарата. Бортовые способы, при которых оборудование транспортируют летательным аппаратом, таким как вертолет, самолет или дирижабль, могут быть полезными для разведки больших площадей. Для бортовых электромагнитных систем данные разведки могут быть собраны, когда самолет или вертолет летит на почти постоянной скорости по почти параллельным и почти равномерно разнесенным линиям на приблизительно постоянной высоте над землей. В некоторых применениях геофизическая электромагнитная разведка морского дна может быть выполнена с использованием оборудования, расположенного под поверхностью тела воды.
Некоторые способы геофизической разведки являются активными и заключаются в том, что оборудование используют для посылки сигнала в целевую область и затем измеряют реакцию на переданный сигнал. Другие способы геофизической разведки являются пассивными и заключаются в том, что измеряют сигналы, полученные от целевой области без первоначальной передачи сигнала в целевую область.
Примером пассивного способа геофизической электромагнитной разведки является магнитная разведка с использованием звуковой частоты ("AFMAG"), при которой измеряют электромагнитные поля от встречающихся в природе источников первичного сигнала. Эти электромагнитные поля распространяются вокруг Земли как плоские волны, направляемые ионосферой и поверхностью земли. Активность молний вдали от точки измерения может создавать сигналы почти с плоской спектральной плотностью на частотах в диапазоне, например, 8 Гц - 500 Гц, изменяющихся в зависимости от географического места, времени суток, сезонов и погодных условий. Пример пассивного способа AFMAG геофизической электромагнитной разведки приведен в патенте США №6,876,202.
Примеры активных способов геофизической электромагнитной разведки включают способы, при которых передатчик используют для распределения первичного поля по целевой области и приемник используют для измерения вторичного поля, созданного целевой областью. Такие системы часто называют системами в частотной области или во временной области. По меньшей мере в некоторых электромагнитных системах в частотной области ("FDEM") катушка передатчика непрерывно передает электромагнитный сигнал на фиксированных кратных частотах, а катушка приемника измеряет вторичные сигналы поля непрерывно во времени.
По меньшей мере в электромагнитных системах во временной области ("TDEM") импульс тока подается на катушку передатчика во время периода включения и отключается во время периода отключения, обычно с частотой повторения, равной нечетному кратному половины частоты местной силовой линии Ответный сигнал измеряется на приемнике как функция времени. Убывание амплитуды ответного сигнала во время периода отключения, совместно с моделированием удельной электропроводности и геометрии геологических тел в земле, можно использовать для создания контурных карт удельной проводимости. Пример системы TDEM приведен в патенте СП ТА №7,157,914.
Раскрытие изобретения
Согласно одному примеру варианта осуществления предложен буксируемый узел катушек приемников для геофизической разведки, включающий: несколько катушек приемников, причем каждая катушка приемника размещена в соответственной секции трубчатой наружной рамы, которая определяет непрерывный проход, в котором проходит катушка приемника, секции трубчатой наружной рамы соединены между собой для получения каркасной рамы, поддерживающей катушки приемников в сущности в постоянном положении относительно друг друга; и буксирный трос, соединенный с каркасной рамой для буксировки рамы, чтобы проводить геофизическую разведку.
Согласно одному примеру варианта осуществления предложен буксируемый узел катушек приемников для бортовой геофизической разведки, включающий: первую, вторую и третью секции трубчатой рамы, причем каждая из секций рамы образует петлю, определяющую соответственный внутренний проход, и причем каждая из первой, второй и третьей секций трубчатой рамы соединена с другими секциями трубчатой рамы в разнесенных местах для формирования рамы буксируемого узла, в которой первая, вторая и третья секции трубчатой рамы поддерживаются в сущности в постоянном положении относительно друг друга; и первую, вторую и третью катушки приемников для измерения сигналов магнитного поля, причем первая, вторая и третья катушки приемников размещены во внутренних проходах первой, второй и третьей секций трубчатой рамы соответственно и причем каждая из первой, второй и третьей катушек приемников имеет ориентацию, отличную от ориентации других катушек приемников.
Согласно одному примеру варианта осуществления предложен узел катушек приемников, включающий наружную трубчатую раму, образующую петлю и определяющую внутренний проход; внутреннюю раму, проходящую во внутреннем проходе; катушку приемника для измерения сигналов магнитного поля, прикрепленную к внутренней раме; первое и второе количества упругих элементов, упруго подвешивающих внутреннюю раму во внутреннем проходе, чтобы прилагать противоположно направленные силы по меньшей мере в двух направлениях для смещения внутренней рамы в центр во внутреннем проходе; и первый удлиненный стержневой элемент, соединенный с несколькими первыми упругими элементами, и второй удлиненный стержневой элемент, соединенный с несколькими вторыми упругими элементами, причем эти удлиненные стержневые элементы усиливают изоляцию внутренней рамы от вибрации наружной трубчатой рамы.
Краткое описание чертежей
Примеры вариантов осуществления изобретения представлены в нижеследующем описании. В описании сделаны ссылки на прилагаемые чертежи, на которых:
Фиг.1 - перспективный вид примера варианта осуществления узла нескольких катушек приемников согласно одному примеру варианта осуществления.
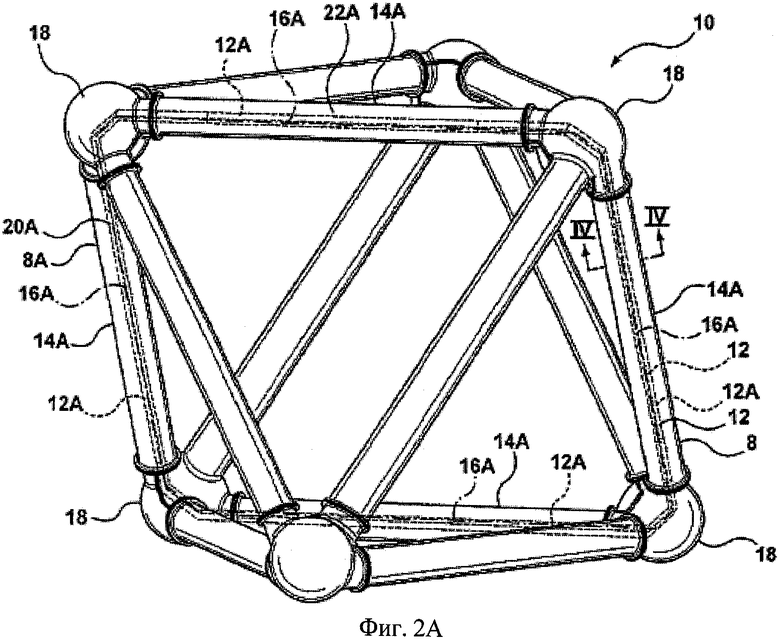
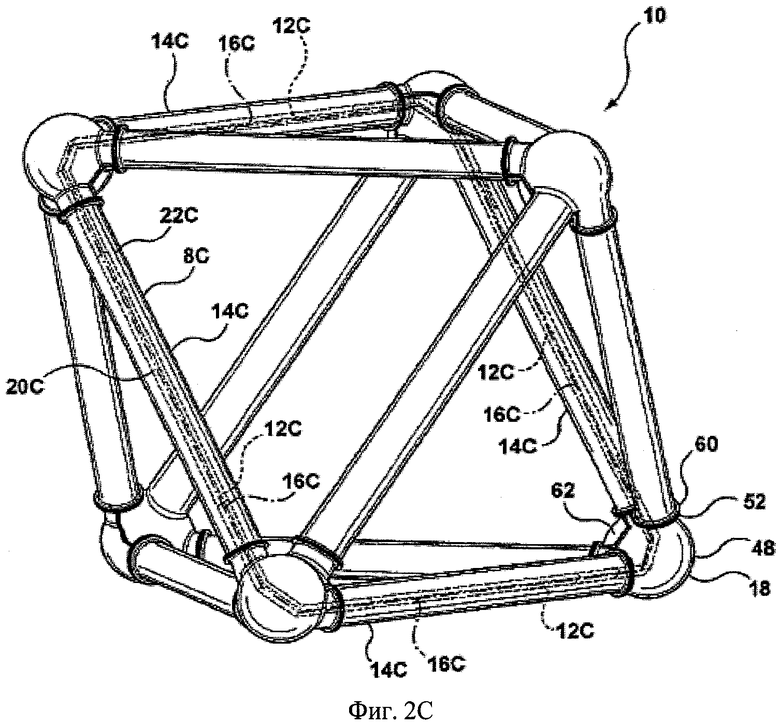
Фиг.2А, 2В и 2С - перспективные виды узла катушек приемников с Фиг.1, каждый из которых показывает одну из трех катушек приемников узла катушек.
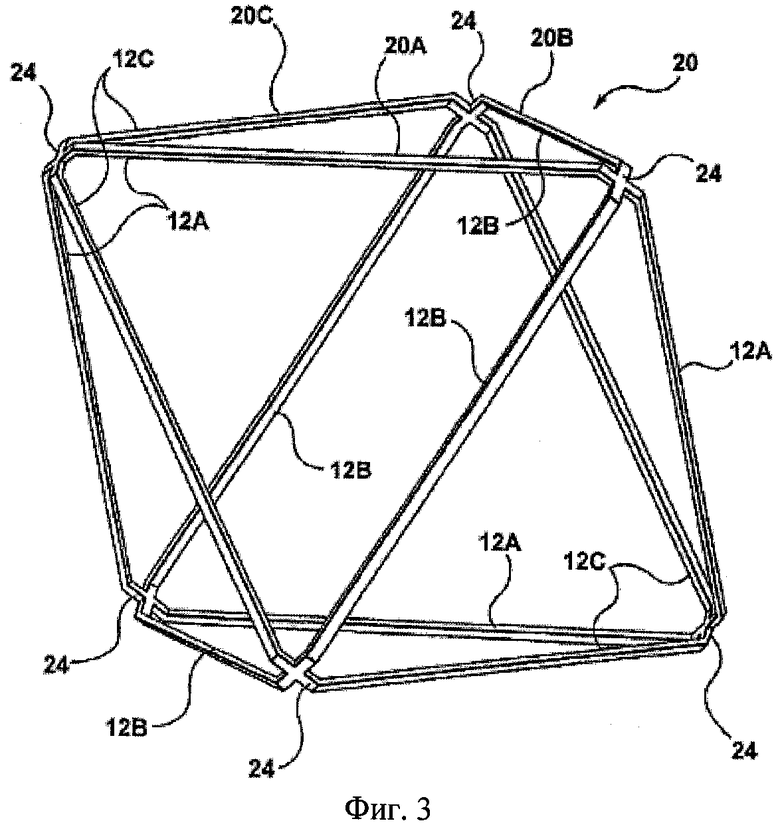
Фиг.3 - перспективный вид внутренней рамы узла катушек приемников с Фиг.1.
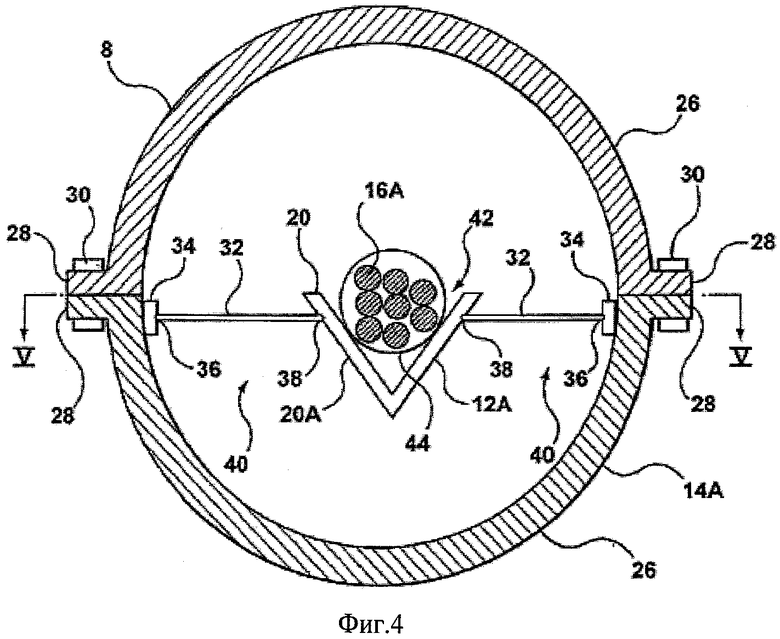
Фиг.4 - вид в разрезе части узла катушек приемников, взятый по линиям IV-IV с Фиг.2А.
Фиг.5 - вид в разрезе части узла катушек приемников, взятый по линиям V-V с Фиг.4.
Фиг.6 - перспективный вид угловой секции узла катушек приемников с Фиг.1.
Фиг.7А - перспективный вид, показывающий возможное соединение буксирного троса для узла катушек приемников с Фиг.1.
Фиг.7В - перспективный вид, показывающий возможное соединение буксирного троса для узла катушек приемников с Фиг.1.
Фиг.8 - перспективный вид альтернативного варианта осуществления узла катушек приемников.
Фиг.9 - вид в разрезе части узла катушек приемников согласно альтернативному варианту осуществления, взятый по линиям IV-IV с Фиг.2А.
Фиг.10А - вид в разрезе части узла катушек приемников согласно альтернативному варианту осуществления, взятый по линиям Х-Х с Фиг.9.
Фиг.10В - вид в разрезе части узла катушек приемников согласно еще одному альтернативному варианту осуществления.
Фиг.10С - вид в разрезе части узла катушек приемников, взятый под прямыми углами к виду в разрезе с Фиг.10В.
Фиг.10D - вид в разрезе части узла катушек приемников согласно еще одному альтернативному варианту осуществления.
Фиг.11 - изображение системы AFMAG для геофизической разведки согласно одному примеру варианта осуществления изобретения.
Фиг.12 - схематический вид системы для геофизической разведки с Фиг.11.
Фиг.13 - изображение системы для геофизической разведки для геофизической разведки согласно еще одному примеру варианта осуществления изобретения.
Фиг.14 - изображение системы для геофизической разведки согласно еще одному примеру варианта осуществления изобретения.
Фиг.15 - еще один пример варианта осуществления возможной каркасной рамы для узла катушек приемников.
Фиг.16 - еще один пример варианта осуществления возможной каркасной рамы для узла катушек приемников.
Описание примеров вариантов осуществления
Узел катушек приемников
На Фиг.1 показан узел нескольких катушек приемников 10 для геофизической разведки согласно примерам вариантов осуществления изобретения. Узел 10 катушек приемников включает несколько катушек приемников, поддерживаемых в каркасной раме 8, которая поддерживает катушки в сущности в фиксированном положении относительно друг друга. Как будет более подробно объяснено ниже, по меньшей мере в некоторых конфигурациях узел 10 катушек приемников может иметь относительно малое отношение массы к размеру катушки, и в применениях, где узел 10 катушек приемников перемещают через текучую среду, такую как воздух или вода, может уменьшать силу торможения.
Узел 10 нескольких катушек приемников с Фиг.1 включает три катушки приемников 16А, 16В и 16С с воздушным сердечником, поддерживаемые в раме 8. Каждая из катушек 16А, 16В и 16С намотана в соответствующей плоскости и имеет соответствующую дипольную ось - по меньшей мере в одном примере варианта осуществления, оси трех катушек 16А, 16В и 16С пересекаются в общей центральной точке, причем ось каждой катушки расположена в сущности под прямым углом к осям двух других катушек.
В одном примере варианта осуществления каркасная рама 8 состоит из трубчатых элементов, которые определяют внутренние проходы, в которых упруго подвешена внутренняя рама 20, и катушки приемников 16А, 16В и 16С прикреплены к внутренней раме 20. Более конкретно, в показанном варианте осуществления каркасная рама включает три соединенных между собой секции 8А, 8В и 8С трубчатой наружной рамы, которые в сущности идентичны друг другу и каждая из которых имеет в сущности идентичные секции 20А, 20В, и 20С внутренней опорной рамы соответственно. Каждая из секций 20А, 20В и 20С внутренней опорной рамы поддерживает соответственную катушку приемника 16А, 16В и 16С. Секции 20А, 20В и 20С внутренней опорной рамы соединены между собой, чтобы образовать внутреннюю раму 20, которая схематически показана на Фиг.3. Соответственно каждая из катушек приемников 16А, 16В и 16С в сущности заключена в соответственной независимой секции 8А, 8В и 8С рамы.
Фиг.2А, 2В и 2С представлены для отдельного показа секций 8А, 8В и 8С рамы соответственно. Каждая из секций 8А, 8В и 8С рамы определяет соответственную петлю для размещения соответственной катушки приемника 16А, 16В и 16С. В описываемом варианте осуществления каждая из секций 8А, 8В и 8С рамы и секций 20А, 20В и 20С внутренней рамы имеет форму параллелограмма и может быть, например, форму квадрата, так что каркасная рама 8 в сущности имеет форму правильного восьмиугольника. Как показано на Фиг.2А, секция 8А наружной рамы образована четырьмя удлиненными трубчатыми элементами 14А, соединенными четырьмя угловыми секциями 18 для образования секции 8А квадратной формы, которая определяет непрерывный внутренний проход 22А, в котором упруго подвешена секция 20А внутренней рамы соответствующей формы. Секция 20А внутренней рамы образована четырьмя удлиненными элементами 12А, соединенными угловыми секциями 24 (Фиг.3). Термин "внутренняя" используется здесь для обозначения секций 20А, 20В и 20С и элементов 12А, 12В и 12С рамы. Катушка приемника 16А закреплена в желобе или проходе, определенном секцией 20А внутренней рамы.
Вспомогательная рама 8В, которая показана на Фиг.2В, также образована четырьмя удлиненными трубчатыми элементами 14В, соединенными четырьмя угловыми секциями 18 для образования квадратной секции 8В, которая определяет непрерывный внутренний проход 22В, в котором упруго подвешена квадратная секция 20В внутренней рамы. Секция 20В внутренней рамы образована четырьмя удлиненными элементами 12В рамы, соединенными угловыми секциями 24. Катушка приемника 16В закреплена в желобе или проходе, определенном секцией 20В внутренней рамы. Как показано на Фиг.2С, вспомогательная рама 8С образована четырьмя удлиненными трубчатыми элементами 14С, соединенными четырьмя угловыми секциями 18 для образования секции квадратной формы 8С, которая определяет непрерывный внутренний проход 22С, в котором упруго подвешена секция квадратной формы 20С внутренней рамы. Секция 20С внутренней рамы образована четырьмя удлиненными элементами 12С рамы, соединенными угловыми секциями 24. Катушка приемника 16С закреплена в желобе или проходе, определенном секцией 20С внутренней рамы.
Как можно видеть на Фиг.1-3, каждая из угловых секций 18 наружной рамы относится к углу и соединяет угол двух из трубчатых секций 8А, 8В и 8С рамы, и каждая из угловых секций 24 внутренней рамы относится к углу и соединяет угол двух из трубчатых секций 20А, 20В и 20С рамы.
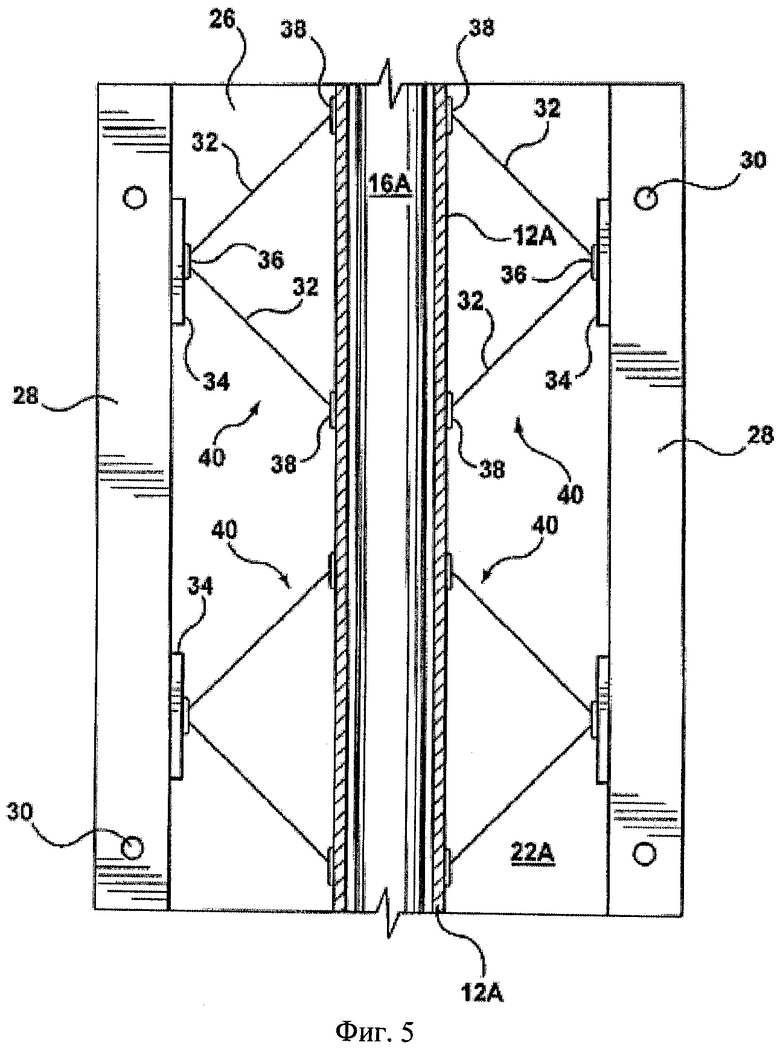
В показанном примере варианта осуществления катушки приемников 16В и 16С и их соответственные опорные элементы 12В, 14В, 12С и 14В внутренней и наружной рам выполнены в сущности идентичными таковым катушки приемника 16А и ее опорных элементов 12А, 14А внутренней и наружной рам, которые теперь будут описаны подробно со ссылками на виды в разрезе, показанные на Фиг.4 и 5. Как можно видеть на Фиг.4, в одном примере варианта осуществления каждый трубчатый элемент 14А рамы состоит из двух, в сущности идентичных удлиненных полуцилиндрических секций 26, которые скреплены между собой совпадающими периферическими фланцевыми частями 28, чтобы определить внутренний проход 22А для катушки приемника. Болты 30 или другие крепежные детали могут быть пропущены через совмещенные крепежные отверстия 30 (Фиг.5), чтобы соединить полуцилиндрические секции 26. Полуцилиндрические секции 26 могут, например, быть выполнены из легкого и жесткого композитного материала, который позволяет электромагнитным сигналам проходить через него с минимальными помехами для катушки приемника 16А или без помех. Элемент 12А внутренней рамы упруго подвешен в трубчатом элементе 14А рамы приблизительно в центре прохода 22А для катушки с помощью нескольких крепежных узлов 40, которые разнесены внутри по длине каждого из трубчатых элементов 14А рамы.
Как лучше всего видно на Фиг.5, каждый крепежный узел 40 включает упругий элемент подвески 32, который проходит между внутренней стенкой трубчатого элемента 14А рамы и элементом 12А внутренней рамы. В одном примере варианта осуществления каждый упругий элемент подвески 32 (который может быть выполнен, например, из резины) прикреплен на противоположных первом и втором концах 38 к разнесенным по длине местам на стороне элемента 12А внутренней рамы и в приблизительно средней точке 36 к внутренней стенке трубчатого элемента 14А рамы, так что упругий элемент подвески 32 принимает V-образную форму, прилагая противоположные продольные силы к элементу 12А внутренней рамы, а также поперечную силу. (Понимается, что V-образный упругий элемент может быть заменен двумя отдельными упругими деталями.) Крепежный блок 34 может быть прикреплен клеем или другим крепежным элементом к внутренней стенке трубчатого элемента 14А рамы, чтобы обеспечить поверхность для крепления средней точки 36 болтом или другим крепежным элементом. В показанном варианте осуществления крепежные узлы 40 расположены парами на противоположных сторонах элемента 12А внутренней рамы, так что в сущности равные, но противоположно направленные силы прилагаются к элементу 12А внутренней рамы упругими элементами подвески 32, чтобы элемент 12А внутренней рамы занимал нормальное положение покоя в центре прохода 22А для катушки, определенного трубчатым элементом 14А рамы, независимо от ориентации рамы 10. В одном примере варианта осуществления все упругие элементы подвески 32 в трубчатом элементе 14А рамы прикреплены к одной его полуцилиндрической секции 26 для облегчения крепления элемента 12А внутренней рамы на его месте перед закрытием прохода 22А для катушки приемника другой полуцилиндрической секцией 26.
Упругие элементы 32 могут быть выполнены из резины или другого подходящего упругого или эластичного материала. Крепежный узел 40 может иметь много конфигураций, отличных от показанной на Фиг.4 и 5, чтобы упруго подвешивать элемент 12А внутренней рамы.
Снова со ссылкой на Фиг.4, в некоторых вариантах осуществления элемент 12А внутренней рамы имеет V-образное поперечное сечение и определяет открытый желоб 42, который создает кабельный проход 44, в котором расположена катушка 16А приемника. В некоторых примерах вариантов осуществления элемент 12А внутренней рамы альтернативно может иметь полупрямоугольную, полукруглую, круглую или другую площадь поперечного сечения. По меньшей мере в некоторых вариантах осуществления катушка 16А приемника является петлей или многовитковой катушкой, которая закреплена в желобе 42 лентой и/или крепежным механизмом другого типа.
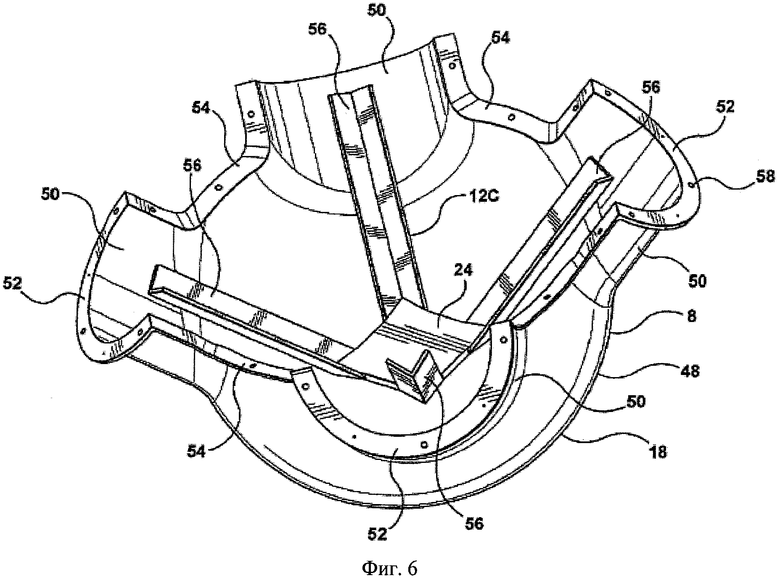
В показанном варианте осуществления восьмиугольная каркасная рама 8 имеет всего двенадцать трубчатых элементов 14А, 14В и 14С (по четыре элемента 14А, 14В и 14С) и шесть угловых секций 18. Каждая из угловых секций соединяет пару трубчатых элементов рамы, которые поддерживают одну из катушек приемников, с парой трубчатых элементов рамы, которые поддерживают одну из двух других катушек приемников, так что части двух катушек приемников проходят через каждую из угловых секций 18. На Фиг.6 более подробно показана, без показа любой катушки приемника, одна из угловых секций 18 согласно одному примеру варианта осуществления. Угловая секция 18 имеет съемную секцию 62 внутренней стенки (на Фиг.6 снята - см. Фиг.2С) и секцию 48 наружной корзины. Секция 48 наружной корзины включает полусферическую центральную часть, из которой выходят четыре полуцилиндрических штыря 50. Каждый из штырей 50 имеет боковой периферический фланец 52 для сопряжения с соответствующим фланцем 60 (Фиг.2С) на соответствующем трубчатом элементе 14А, 14В или 14С рамы. На фланцах 52 и 60 предусмотрены совмещаемые крепежные отверстия 58 для соединения. Секция 62 внутренней стенки имеет форму, которая соответствует форме секции наружной корзины, и включает периферические фланцевые части, которые соответствуют фланцевым частям 54 секций наружной корзины и фланцам 60 соответствующих трубчатых элементов 14А, 14В или 14С рамы. Внутренняя рама 12 включает внутреннюю угловую часть 24, которая имеет определяющие желоб, рычаги 56, которые прикреплены к элементам 12А, 12В и 12С внутренней рамы и которые поддерживают пару катушек приемников в точке, где они перекрываются в угловой секции 18. В некоторых примерах вариантов осуществления угловая часть 24 внутренней рамы прикреплена к секции 48 корзины наружной рамы и/или съемной секции 62 внутренней стенки упругими элементами, однако в некоторых вариантах осуществления угловая часть 24 внутренней рамы только соединена с остальной частью внутренней рамы 12 и поддерживается ею.
По меньшей мере в некоторых конфигурациях каркасный восьмиугольный узел 10 катушек приемников создает относительно легкую конструкцию для размещения и поддержки трех катушек приемников 16А, 16В и 16С в разных плоскостях относительно общей центральной точки. Кроме того, каркасный тип узла катушек приемников может снижать силу торможения, вызываемую текучей средой, такой как воздух или вода, проходящей через узел 10, по сравнению, например, со сплошным сферическим буксируемым узлом. Упругая подвеска внутренней рамы 20 может, по меньшей мере в некоторых применениях, уменьшать шум, вызывающий вибрацию, которой катушки приемников могут быть подвержены в других случаях. Восьмиугольная конструкция каркасной рамы 8 может, по меньшей мере в некоторых примерах вариантов осуществления, создавать прочную конструкцию для поддержания катушек приемников 16А, 16В и 16С в сущности в стабильных положениях относительно друг друга.
На Фиг.7А показана одна возможная конфигурация для буксировки буксируемого узла 10 самолетом или другим носителем. В показанном примере три соединительных троса 80 имеют первые концы, каждый из которых соответственно соединен с тремя верхними углами 18 рамы 8 буксируемого узла, и противоположные концы, которые соединены с общим соединителем 82. Первые концы соединительных тросов 80 могут, например, быть соединены с соединительными петлями или проушинами (не показаны) на углах 18 или непосредственно привязаны к углам рамы 8. В некоторых примерах вариантов осуществления общий соединитель 82 соединен одним или несколькими шнурами пружинного типа 84 с концом буксирного троса 64, который прикреплен к летательному аппарату. Амортизирующие тросы 84 (или подходящая упругая альтернатива) могут в некоторых конфигурациях способствовать изоляции узла 10 катушек приемников от вибрации летательного аппарата. Длины соединительных тросов 80 могут отличаться друг от друга и могут быть выбраны так, чтобы обеспечить раме 8 разные желательные ориентации на разных скоростях горизонтального полета. Например, длины соединительных тросов могут быть выбраны так, что на типичной скорости разведки катушки приемников 8 имеют определенную ориентацию, такую как показанная на Фиг.7А, но на низких скоростях или при не горизонтальном полете рама 8 может быть опущена по вертикали так, чтобы приземлиться в общем одновременно на три нижних угла 18 в положение, показанное на Фиг.1, чтобы уменьшить посадочные и взлетные напряжения на раме. В некоторых вариантах осуществления один или несколько стабилизаторов или щитов из ткани или другого легкого материала могут быть выборочно размещены на одной или нескольких частях рамы 8, чтобы создать поверхность раздела с воздухом для получения желательной ориентации рамы 8 во время полета.
В некоторых примерах вариантов осуществления в узел рамы включены предварительные усилители, которые подсоединены к проводникам, идущим от катушек приемников 16А, 16В и 16С, для усиления сигналов, принимаемых катушками приемников 16А, 16В и 16С. Например, как показано на Фиг.7А, предварительные усилители 86 могут быть расположены внутри одного угла 18 рамы 8 для двух катушек приемников, которые проходят через этот угол (например, катушки 16А и 16В), и еще один предварительный усилитель 86 для еще одной катушки приемника (например, для катушки 16С) может быть расположен внутри другого угла 18 рамы. Распределительная коробка 108, расположенная на одном из углов 18, соединена с каждой из катушек приемников 16А, 16В и 16С через предварительные усилители 86. Распределительная коробка 108 также соединена с электрическими кабелями 124, которые проходят рядом с одним из соединительных кабелей 80 и вдоль буксирного троса 64 к компьютеру для контроля данных, который получает информацию с катушек приемников 16А, 16В и 16С, и к источнику электропитания предварительных усилителей 86 и других активных устройств, таких как GPS-приемники или другие устройства определения местоположения, которые могут быть прикреплены к раме 8. В некоторых вариантах осуществления проводники от предварительного усилителя 86, расположенного в одном углу 18 рамы, к распределительной коробке 108 могут быть проведены внутри одного из трубчатых элементов рамы и пространственно отделены от катушки приемника в этом трубчатом элементе, как показано пунктирной линией 88 на Фиг.7А.
В некоторых примерах вариантов осуществления датчики положения 90, такие как датчики GPS и/или акселерометры, могут быть расположены в одном или нескольких местах рамы 8, например, на Фиг.7А показаны три GPS-антенны 90, расположенные в трех соответственных углах 18 рамы 8, и электрически соединены с GPS-приемником 92, который установлен на соединителе 82 или буксирном тросе 64. В некоторых примерах вариантов осуществления другие устройства определения положения могут быть установлены на раме 8, например устройство по технологии позиционирования Novatel™ SPAN, такое как SPAN IMU-LN200 или SPAN СРТ, в некоторых случаях вспомогательная рама может быть прикреплена к раме 8 для установки устройств позиционирования в центре рамы.
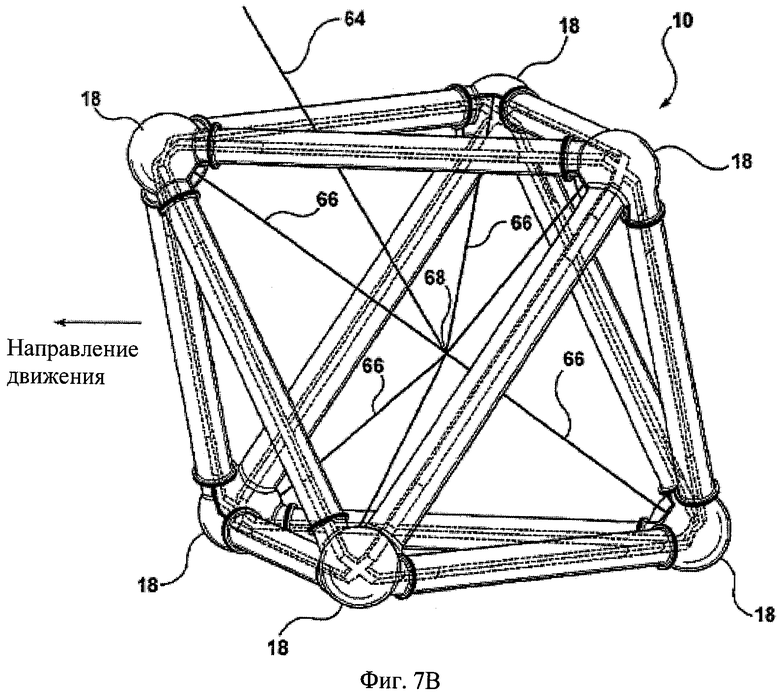
На Фиг.7В показана еще одна возможная конфигурация троса для буксировки буксируемого узла 10 самолетом или другим носителем. В показанном примере отдельный соединительный трос 66 проходит от каждой из угловых секций 18 узла 10 катушек приемников к центральному соединению 68, которое закреплено на буксирном тросе 64. Длины по меньшей мере некоторых из соответственных соединительных тросов 66 могут быть разными, чтобы обеспечить желательную ориентацию узла катушек приемников в полете. Соединительные тросы 66 также могут прилагать напряжения к соответственным угловым секциям 18 и этим повышать прочность и жесткость узла 10 катушек приемников. Конфигурация буксирного троса может отличаться от показанной на Фиг.7 в зависимости от применения, например, узел может быть альтернативно подвешен на сети или соединительных тросах 66, соединенных с частями рамы 8, а не с углами 18 или в дополнение к ним.
В некоторых примерах вариантов осуществления конфигурацию буксирного троса выбирают (например, по длине и местам расположения соединительных кабелей и, возможно, посредством использования одного или нескольких стабилизаторов, прикрепляемых к буксируемому узлу 10) так, чтобы оси катушек приемников поддерживались в желательной ориентации во время полета, например, ось одной катушки проходит в вертикальном направлении, ось одной катушки ориентирована в направлении хода, и ось одной катушки ориентирована горизонтально под прямым углом к направлению хода.
В одном примере варианта осуществления электрические проводники каждой из катушек 16А, 16В и 16С приемников проходят через соответственные отверстия, выполненные в наружной раме 8 и соединены с электрическими кабелями, которые прикреплены к буксирному тросу 64 так, чтобы катушки 16А, 16В и 16С приемников можно было дистанционно контролировать с буксирующего летательного аппарата.
Как станет понятно из вышеприведенного описания, в примерах вариантов осуществления узел 10 катушек выполнен таким образом, чтобы его можно было разобрать и транспортировать, а затем снова собрать в другом месте разведки. Как сказано выше, в примерах вариантов осуществления секция 20А внутренней рамы, секция 20В внутренней рамы и секция 20С внутренней рамы выполнены из четырех удлиненных элементов 12А, 12В, 12С, соответственно соединенных с угловыми секциями 24, и катушки 16А, 16В и 16С приемников закреплены лентой или клеем или другими крепежными элементами в соответствующих каналах или проходах 42 в удлиненных элементах 12А, 12В и 12С рамы. Со ссылкой на секцию 20А внутренней рамы, в примере варианта осуществления угловые секции 24 соединены с возможностью разъединения на концах четырех прямых элементов 12А рамы так, чтобы во время разборки буксируемого узла 10 эти четыре прямых удлиненных элемента 12А можно было снять с узла 10 катушек приемников вместе с катушкой 16А приемника, все еще прикрепленной к удлиненным элементам 12А, чтобы катушка 16А приемника была по существу жесткой на четырех сторонах, но гибкой на четырех углах, что позволяет катушке приемника (вместе с четырьмя прямыми удлиненными элементами 12А рамы) складываться в компактный пучок, в котором четыре прямых удлиненных элемента 12А расположены параллельно друг другу при сохранении непрерывности проводников, которые составляют катушку приемника, позволяя впоследствии повторно смонтировать катушку 16А приемника в узле 10 катушек приемников в практически такой же конфигурации. Секции 20В и 20С внутренней рамы, которые поддерживают катушки 16В и 16С приемников, соответственно, также могут быть сняты и сложены для транспортировки.
В некоторых примерах вариантов осуществления трубчатые элементы 14А, 14В и 14С рамы и элементы 12А, 12В и 12С внутренней рамы могут быть выполнены из некоторого количество более коротких сегментов, соединенных между собой, и в этом отношении на Фиг.8 показан трубчатый элемент 14В рамы, который выполнен из нескольких подсекций 70, которые скреплены между собой в соответствующих частях крепежными элементами 72. Сегментированные элементы рамы облегчают транспортировку более крупных узлов катушек приемников в место разведки и из него в форме наборов, которые можно собирать и разбирать на месте. Кроме того, одинаковые элементы рамы можно использовать для сборки рам 8 различных размеров.
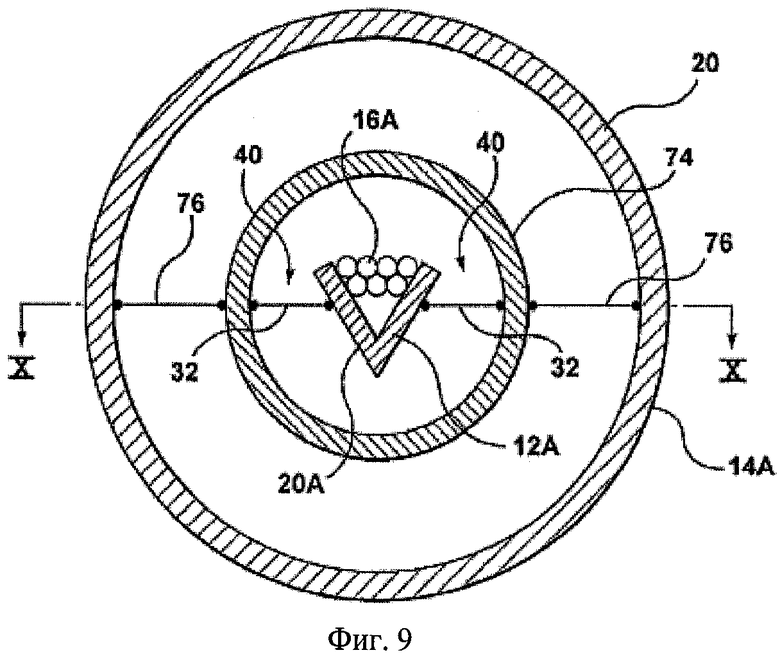
Со ссылкой на Фиг.9 и 10А, в еще одном альтернативном варианте осуществления используется система двойной подвески для подвески внутренней рамы 20 катушки приемника в наружной раме 8 узла 10 катушек приемников. Хотя на Фиг.9 и 10А показаны секции 8А и 20А рам, используемые для размещения катушки 16А приемника, секции 8В, 20В и 8С и 20С рамы в сущности идентичны показанным на Фиг.9 и 10А. В системе двойной подвески с Фиг.9 и 10А узлы подвески 40, расположенные по длине каждого из элементов 12А, 12В и 12С внутренней рамы, соединены с элементами 74 промежуточной рамы, которые в свою очередь подвешены на элементах 14А, 14В и 14С наружной рамы. Например, первые упругие элементы 32 подвески с противоположных сторон подвешивают элемент 12А внутренней рамы в центре цилиндрического или полуцилиндрического промежуточного элемента 74, который подвешен по центру аналогичным образом другими упругими элементами 76, которые проходят между цилиндрическим промежуточным элементом 74 и элементом 14А наружной рамы. Как показано на Фиг.10А, другие упругие элементы 76 также могут быть расположены по V-образной схеме, чтобы противодействовать продольному движению, а также радиальному движению так же, как и первые упругие элементы 32 подвески.
Таким образом, в варианте осуществления с Фиг.9 и 10А секция 20А внутренней рамы, которая поддерживает катушку 16А приемника, подвешена на некотором количестве первых упругих элементов 32 подвески с некоторого количества соответствующих секций 74 промежуточной рамы, которые в свою очередь подвешены на одном или нескольких вторых упругих элементах 76 подвески (которые могут быть выполнены, например, из резины) с наружной рамы 8А. Секция 20А внутренней рамы, кроме того, может быть расположена в центре наружной рамы или рядом с ним. Области, которые (i) расположены близко к соединениям между первыми элементами 32 подвески и каждой из секции 20А внутренней рамы и секциями 74 промежуточной рамы и (ii) расположены рядом с соединениями между вторыми элементами 76 подвески и каждой из секций 74 промежуточной рамы и наружной рамой 8А, могут быть покрыты веществом, уменьшающим трение, например силиконом. Силиконовое покрытие может снижать шум, вызываемый трением в точке крепления или соединения. В некоторых примерах вариантов осуществления первые элементы подвески могут быть соединены с соответствующими секциями рамы тросовыми стяжками, которые проходят через предварительно просверленные отверстия или прикрепленные петли. Альтернативно можно использовать любое количество других возможных способов для крепления первых и вторых элементов подвески, включая: крюки или обработанную точку крепления наподобие крюка, соединенную с точками крепления, посредством которых элементы подвески могут быть пропущены вокруг крюков и затем покрыты силиконом; альтернативно петли на первых и вторых элементах подвески могут быть ввинчены в точки крепления; еще одной возможностью является приклеивание первых и вторых элементов подвески к внутренней раме и к секциям наружной рамы или промежуточной рамы.
Как показано на Фиг.9 и 10А, первые и вторые элементы 32 и 76 подвески проходят под углом, отличным от 90 градусов, для радиального и продольного смещения секций 20А, 20В и 20С внутренней рамы и катушек 16А, 16В и 16С приемников в центральном положении во внутренних проходах 22А, 22В и 22С катушек приемников соответственно. Одинарная и двойная системы подвески, которые описаны выше, могут, по меньшей мере в некоторых вариантах осуществления, улучшать отношение сигнал-шум узла катушек приемников путем уменьшения действия вибрации узла 10 катушек приемников на катушки 16А, 16В и 16С приемников. В других примерах вариантов осуществления могут использоваться другие поддерживающие механизмы, включая тройную подвеску, пружины, окружение катушки пеной или другие средства позиционирования катушки в центре внутренней рамы так, чтобы уменьшить шум.
В некоторых вариантах осуществления место и положение элементов подвески в узле катушки приемников может меняться, например, большее количество упругих элементов подвески может быть расположено на предполагаемом верху узла, чем в направлении низа. На Фиг.10В и 10С показана еще одна возможная конфигурация подвески внутренней рамы 12 для узла 10 катушек приемников. Хотя на Фиг.10В и 10С показаны секции 8А и 20А рамы, используемые для размещения катушки 16А приемника, секции 8В, 20В и 8С и 20С рамы в сущности идентичны тому, что показано на Фиг.10В и 10С. Конфигурация, показанная на Фиг.10В и 10С, подобна описанной выше в отношении Фиг.4 и 5 с добавлением промежуточных жестких стержней 94, которые проходят продольно в цилиндрическом проходе 22А между противоположными сторонами элемента 12А внутренней рамы и стенкой, определенной элементом 14А наружной рамы. Каждый из упругих элементов 32 подвески на одной стороне элемента 14А секции 20А внутренней рамы прикреплен приблизительно в средней точке 98 к одному из жестких стержней 94, и каждый из упругих элементов 32 подвески на противоположной стороне секции 20А внутренней рамы прикреплен в средней точке 98 к другому из жестких стержней 94. Стержни 94 могут связывать вместе элементы подвески, чтобы распределять силы, прилагаемые к любому отдельному элементу среди некоторого количества элементов подвески. Дополнительно сами стержни 94 могут действовать как структуры, поглощающие или отражающие энергию, из-за того, что стержни действуют как масса или инерция, которая обеспечивает дополнительную ступень изоляции для внутренней рамы от вибрации наружной рамы. В одном примере варианта осуществления стержни 94 проходят в сущности по длине соответствующего элемента 12А рамы, в котором они расположены. Стержни 94 в некоторых вариантах осуществления могут быть разделены на меньшие секции стержня. На Фиг.10С приведен еще один вид в разрезе, взятый под прямыми углами к виду с Фиг.10В, показывающий систему подвески. Стержни 94 могут быть выполнены, например, из стекловолокна или других композитных материалов или металла в некоторых вариантах осуществления.
На Фиг.10D показан еще один вариант системы подвески катушек приемников с Фиг.10В и 10С. В варианте осуществления, показанном на Фиг.10D, упругие элементы 32 подвески на каждой стороне катушки 16А приемника состоят из одного упругого элемента, который проходит зигзагообразно между элементом 12А внутренней рамы и элементом 14А наружной рамы. Стержни 94 закреплены в средних точках элементов 32 подвески. На Фиг.10 также показаны стержни 94, разделенные на меньшие секции.
В дополнение к использованию в буксируемом узле из трех катушек приемников, который описан выше, системы упругой подвески катушек приемников, показанные на чертежах и описанные выше, также могут быть применены в катушкам приемников в других конфигурациях, включая, например, буксируемые узлы с одной катушкой, которые включают буксирные узлы только с одной катушкой и двумя катушками приемников.
Хотя на чертежах показан восьмиугольный узел 10 катушек приемников, каркасный узел 10 катушек приемников альтернативно может иметь другие формы и расположение заключенных в нем катушек приемников. Например, каркасная рама может включать секции рамы катушек приемников, которые совместно определяют, например, каркасную сферическую, или кубическую, или пирамидальную форму. Кроме того, в некоторых применениях могут быть использованы больше чем три катушки приемников. Например, на Фиг.15 показан пример узла 10' катушек приемников, который в сущности подобен узлу 10 за тем исключением, что три прямоугольные трубчатые секции 8А', 8В' и 8С' квадратной каркасной рамы 8' соединены друг с другом в средних точках 96, а не в углах. На Фиг.16 показан пример еще одного узла 10" катушек приемников, который в сущности подобен узлу 10 за тем исключением, что каркасная рама 8" имеет в общем сферический профиль и образована тремя пересекающимися трубчатыми секциями 8А", 8В" и 8С" круглой рамы, которые соединены между собой в точках 96.
После описания примеров вариантов осуществления узла 10 катушек приемников теперь будут более подробно объяснены примеры того, как можно использовать узел 10 катушек приемников.
Многоосная система AFMAG
В одном примере варианта осуществления узлы 10 катушек приемников используются для реализации бортовой системы AFMAG для геологической съемки, предназначенной для измерения магнитных полей с звуковыми и субзвуковыми частотами, исходящих из встречающихся в природе источников, таких как разряды молний. Существующие бортовые системы на основе AFMAG для геологической съемки обычно работают на основе того предположения, что в отсутствие локальных проводников встречающиеся в природе компоненты магнитного поля AFMAG, измеряемые выше рельефа местности съемки, будут иметь произвольное направление, но будут лежать в горизонтальной плоскости, тогда как присутствие локального проводника или локального магнитного тела в местности съемки будет изменять направления компонент магнитного поля так, что они не будут горизонтальными. Однако предположение, что природные магнитные поля горизонтальные, если нет изменений в подпочвенной проводимости, может вносить ошибки в некоторых применениях, так как ионосферные проводники неоднородны и стабильны во времени и также могут вызывать изменения вертикальной компоненты магнитного поля на звуковой частоте. Ошибка также может быть вызвана нестабильностью пространственного положения узла катушки датчика во время съемки в полете, так как любое угловое вращение катушек датчиков создает одинаковую ошибку при изменении углов наклона. Эту ошибку можно уменьшить путем использования датчиков положения, как сказано в патенте США №6,876,202 (Моррисон и др.), но в некоторых ситуациях, когда измерения наземных станций используются в сочетании с данными измерений в полете, это может повлиять на точность коррекции ошибки из-за неизвестных различий между величинами магнитных полей на звуковых частотах в оценках базовых станций и летательного аппарата. В отличие от типичных технологий AFMAG описанные здесь примеры вариантов осуществления не полагаются на соотношение между вертикальной и горизонтальной компонентами магнитного поля на звуковой частоте (или углы наклона), а одновременно полагаются на отношение модулей трехмерных векторов магнитного поля на звуковой частоте в двух (или больше) различных точках в области съемки.
Со ссылкой на Фиг.11, система для геофизической разведки 110 согласно одному примеру варианта осуществления изобретения включает по меньшей мере две пространственно разнесенных систем 112, 114 датчиков для одновременного измерения модулей трехмерных ("3D") векторов в двух разных местах в области съемки. В одном примере варианта осуществления системы 112 и 114 датчиков в сущности функционально эквивалентны и каждая из них включает магнитные датчики 3D-векторов. Одна система 112 датчиков включает буксируемый узел 10-1 катушек приемников, подвешенный на буксирной тросе 64 и буксируемый летательным аппаратом 86, таким как вертолет, самолет или дирижабль, над областью съемки, и другая система 114 датчиков включает наземный узел 10-2 катушек приемников, который стационарный и расположен на земле 88. Как будет более подробно объяснено ниже, каждая из систем 112, 114 датчиков имеет три электромагнитных датчика, размещенных для измерения значения электромагнитного поля на звуковой частоте в трех измерениях. В одном примере варианта осуществления каждый из узлов 10-1 и 10-2 катушек приемников реализован с использованием узла катушки приемников, который в сущности идентичен или узлу 10 катушек с одной подвеской, описанному выше в отношении Фиг.1-8, или узлу 10 катушек с двойной подвеской, описанному выше в отношении Фиг.9 и 10А, или системам подвески, описанным выше в отношении Фиг.10B-10D.
По меньшей мере в некоторых применениях система для геофизической разведки 110 менее чувствительна к встречающимся в природе изменениям, не вызываемым присутствием проводника в углах наклона магнитного поля на звуковой частоте (например, изменениям, вызываемым ионосферой или изменениями в рельефе местности), и не так зависит от пространственного положения датчика, буксируемого летательным аппаратом, как типичные системы AFMAG. Как известно из уровня техники, естественное электромагнитное поле Земли в диапазоне звуковых частот можно наблюдать и измерять почти везде. Наиболее стабильный частотный диапазон, который меньше всего зависит от условий ионосферы, обычно составляет 8-400 Гц и, таким образом, является удобным диапазоном для геофизической съемки. В некоторых применениях диапазон измерений начинается приблизительно с 25 Гц, поскольку индуцируемый движением шум на узле датчиков, буксируемом летательным аппаратом, стремится к повышению на более низких частотах, однако в некоторых конфигурациях можно выполнять измерения на частотах ниже 25 Гц, например на 8 Гц, и выше 400 Гц. Если область имеет электрически однородный материал под земной поверхностью, магнитная компонента естественных переменных электромагнитных полей в этой области также будет однородной. Таким образом, если съемку области проводят, используя бортовую систему 112 датчиков и стационарную систему 114 датчиков базовой станции, модуль 3D вектора магнитного поля на звуковой частоте, измеренный на стационарной системе 112 датчиков станции и буксируемой летательным аппаратом системе 114 датчиков, обычно будет одинаков, за исключением различий главным образом из-за пространственного разделения систем 112, 114. В том случае, если подземные проводники или другие рассеянные тела присутствуют, интенсивность поля в области будет неоднородной и будет изменяться в этой области из-за дополнительных электромагнитных полей, генерируемых вихревыми токами, индуцируемыми посредством естественных электромагнитных событий в подземных проводниках.
Различия в модуле 3D вектора магнитного поля на звуковой частоте, измеренные на стационарной системе 114 датчиков на наземной базовой станции и на буксируемой летательным аппаратом системе 112 датчиков, обычно будут наибольшими над подземным проводником, и такое различие используется в системе для геофизической разведки 110, чтобы обнаруживать возможные подземные проводники. Таким образом, пики аномалий, обнаруженные с использованием системы для геофизической разведки 110, расположены, по меньшей мере в некоторых применениях, над верхом подземных электрических проводников, по сравнению с типичными системами AFMAG, основанными на угле наклона, которые полагаются на углы наклона полей, в которых пиковые аномалии происходят на сторонах проводников (например, на переходе между материалами с разной проводимостью). По меньшей мере в некоторых применениях система для геофизической разведки 110, описанная в настоящем документе, которая обнаруживает аномалии над верхами проводников, может облегчить геологическую интерпретацию, поскольку совокупные аномалии интенсивности поля могут быть сильнее, чем аномалии, только Z-компоненты, которые используются в известных системах AFMAG, основанных на углах наклона, этим давая более хорошее отношение сигнал-шум. Кроме того, по меньшей мере в некоторых примерах вариантов осуществления, описанная здесь система сравнения модулей 3D векторов полей не требует каких-либо датчиков положения, что упрощает оборудование системы.
После представления общего обзора бортовая система для геофизической разведки 110 теперь будет описана более подробно со ссылкой на Фиг.11 и 12. В одном примере варианта осуществления буксируемый узел 10-1 катушек приемников бортовой системы 112 датчиков включает три электромагнитных датчика 16А, 16В и 16С в форме трех в сущности плоских катушек, которые в сущности ортогональны друг другу. Например, в одном варианте осуществления первая катушка 16В или катушка Z-оси имеет дипольную ось, которая проходит по Z-оси, вторая катушка 16В или катушка Х-оси имеет дипольную ось, ориентированную в направлении Х-оси, и третья катушка 16С или катушка Y-оси имеет дипольную ось, которая ориентирована в направлении Y-оси. Оси X, Y и Z фиксированы относительно узла 10-1 катушек приемников, а не относительно какой-то внешней опорной точки и соответствуют трем линиям, которые пересекаются в общей точке, в сущности в центре узла 10-1 катушек приемников, и каждая ось ортогональна двум другим осям.
В одном не ограничивающем примере варианта осуществления ортогональные Z, Х и Y катушки 16А, 16В и 16С являются многовитковыми катушками с воздушным сердечником, имеющими диаметр 3 м и эффективную площадь 1000 кв.м каждая; однако могут быть использованы другие эффективные площади и другие формы и конфигурации датчиков. Как сказано в вышеприведенном описании, Фиг.1-10, узел 10-1 катушек приемников может по меньшей мере в некоторых применениях поддерживать в сущности постоянную площадь для каждой из катушек 16А, 16В и 16С и поддерживать в сущности постоянную относительную высоту и промежуток между катушками.
Аналоговые сигналы, которые представляют напряженность природного магнитного поля, с Z-катушки 16А, Х-катушки 16В и Y-катушки 16С подаются через соединительную коробку 108 (которая может включать малошумящий усилитель) и кабель 124 на бортовой компьютер 122 сбора данных, который будет обычно расположен внутри летательного аппарата 86. Компьютер 122 включает аналого-цифровой преобразователь (АЦП) 128, подсоединенный для приема аналоговых сигналов с катушек 16А, 16В и 16С датчиков. В одном примере варианта осуществления АЦП 128 имеет три 24-битных канала аналого-цифрового преобразования (по одному для каждой оси измерения) для оцифровки аналоговых сигналов с Z-катушки 16А, Х-катушки 16В и Y-катушки 16С одновременно. В одном не ограничивающем примере выборка каждого канала происходит на частоте 2000 Гц, однако могут быть использованы и другие частоты выборки. Бортовой компьютер 122 оснащен одним или несколькими элементами памяти, которые могут включать оперативную память, флэш-память, жесткий диск или другие типы электронных средств для хранения оцифрованных сигналов, полученных от буксируемого узла 10-1 катушек приемников и других устройств ввода, которые соединены с компьютером 122. Компьютер 122 может быть настроен на выполнение функций обработки данных на сигналах, которые он принимает.
В примерах вариантов осуществления бортовая система 112 датчиков или буксирующий летательный аппарат имеет устройство 138 Глобальной системы позиционирования ("GPS"), так что данные, полученные от буксируемого узла 10-1 катушек приемников, могут быть соотнесены с географическим положением и временным сигналом GPS. В одном примере варианта осуществления бортовая система датчиков также включает систему альтиметра 136, соединенную с бортовым компьютером 122, чтобы соотносить данные, полученные от буксируемого узла 10-1 катушек приемников, с измерениями высоты. В одном примере варианта осуществления система альтиметра 136 включает альтиметр, который выдает данные по относительной высоте буксируемого узла 10-1 катушек приемников над фактическим рельефом местности. Она также может включать еще один альтиметр, который дает данные по абсолютной высоте буксируемого узла 10-1 катушек приемников над фиксированной опорной точкой (например, над уровнем моря).
Стационарная система 114 датчиков подобна бортовой системе 112 датчиков, но конфигурирована для размещения на стационарной базовой станции и включает наземный узел 10-2 катушек приемников, который в сущности идентичен буксируемому узлу 10-1 катушек приемников. В этой связи наземный узел 10-2 катушек приемников также имеет Z, Х и Y датчики 16А, 16В и 16С.
Как и в бортовой системе 112 датчиков, в стационарной системе 114 датчиков аналоговые сигналы, которые представляют напряженность природного магнитного поля и поступают с Z-катушки 16А, Х-катушки 16В и Y-катушки 16С, подаются через соединительную коробку 108 (которая может включать малошумящий усилитель) и кабель 124 в компьютер 123 для сбора данных, который обычно будет расположен рядом с наземным узлом 10-2 катушек приемников. Наземный компьютер 123 включает аналого-цифровой преобразователь (АЦП) 128, соединенный для приема аналоговых сигналов с трех катушек 16А, 16В и 16С датчиков наземного узла 10-2 катушек приемников. В одном примере варианта осуществления АЦП 128 имеет три 24-битных каналов аналого-цифрового преобразования (по одному для каждой оси измерения) для оцифровки аналоговых сигналов с Z-катушки 16А, Х-катушки 16В и Y-катушки 16С одновременно. В одном не ограничивающем примере выборка каждого канала происходит на частоте, которая аналогична частоте выборки, используемой в компьютере 122 бортовой системы датчиков. Наземный компьютер 123 оснащен одним или несколькими элементами памяти, которые могут включать оперативную память, флэш-память, жесткий диск или другие типы электронных средств для хранения оцифрованных сигналов, полученных от наземного узла 10-2 катушек приемников и других устройств ввода, которые соединены с компьютером 123. Компьютер 122 может быть настроен на выполнение функций обработки данных на сигналах, которые он принимает. Стационарная система 114 датчиков имеет устройство 138 Глобальной системы позиционирования ("GPS"), так что данные, полученные от наземного узла 10-2 катушек приемников могут быть соотнесены с временным сигналом GPS и, в некоторых случаях, с географическим положением.
В одном примере варианта осуществления данные, собранные бортовым компьютером 122, и данные, собранные наземным компьютером 123, в конечном счете передаются по каналам связи 130, 132 (которые могут быть проводными или беспроводными или могут включать физическую передачу среды памяти, такой как лазерные диски или карты флэш-памяти) в систему обработки данных, такую как компьютер 126 для обработки данных, в котором данные по электромагнитному полю, полученные с узлов 10-1 и 10-2 катушек приемников системы 112 и 114 датчиков, данные от системы альтиметра 136 и данные GPS с датчиков GPS 138, относящиеся к каждому из воздушного узла 10-1 катушек приемников и наземного узла 10-2 катушек приемников, обрабатываются для определения того, существуют ли какие-то аномалии, которые могут указывать на представляющее интерес подземное тело. В некоторых примерах вариантов осуществления некоторые или все из функций обработки, выполняемые компьютером 126, могут быть выполнены в одном или обоих из бортового или наземного компьютеров 122 и 123.
В эксплуатации бортовая система 112 датчиков может лететь в сущности на постоянной скорости в последовательности параллельных линий над область съемки, чтобы осуществить серию измерений магнитного поля в звуковом частотном диапазоне в трех ортогональных векторах. Одновременно с этим, стационарная система 114 датчиков, расположенная на земле в области съемки, также осуществляет серию измерений магнитного поля в трех ортогональных векторах. Стационарная система 114 датчиков должна, по меньшей мере в некоторых примерах использования, быть размещена на достаточном расстоянии от промышленных источников электромагнитных полей, например от линий электропередачи, чтобы природные магнитные поля на звуковой частоте доминировали в сигналах, принимаемых в месте размещения стационарной системы 114 датчиков, и остаточный промышленный шум отфильтровывался при последующей обработке сигналов. Например, в одном применении расстояние стационарной системы 114 датчиков от мощных линий электропередачи может составлять по меньшей мере 3 км. В примерах вариантов осуществления не существует требований по специальной пространственной ориентации или высоте бортового или наземного узлов 10-1, 10-2 катушек приемников. Например, оси Х, Y и Z бортового узла 10-1 катушек приемников не обязательно должны быть ориентированы в том же направлении, что и оси X, Y и Z наземного узла 10-2 катушек приемников, и ориентация бортового узла 10-1 может изменяться в течение полета, отрицательно, не влияя на результаты съемки.
Таким образом, при проведении съемки какой-либо области бортовой компьютер 122 принимает и вводит в память поток оцифрованных данных, которые представляют встречающееся в природе магнитное поле на звуковой частоте Hz(air)(t), измеренное бортовой катушкой Z-оси 16А, встречающееся в природе магнитное поле на звуковой частоте Hx(air)(t), измеренное бортовой катушкой Х-оси 16В, и встречающееся в природе магнитное поле на звуковой частоте Hy(air)(t), измеренное бортовой катушкой Y-оси 16С. Каждый из результатов бортовых измерений магнитного поля снабжается метками о положении GPS и времени, полученными от датчика GPS 138, и информацией о высоте от системы альтиметра 138. В то же время наземный компьютер 123 принимает и вводит в память поток оцифрованных данных, которые представляют встречающееся в природе магнитное поле на звуковой частоте Hz(ground)(t), измеренное наземной катушкой Z-оси 16А, встречающееся в природе магнитное поле на звуковой частоте Hx(ground)(t), измеренное наземной катушкой Х-оси 16В, и встречающееся в природе магнитное поле на звуковой частоте Hy(ground)(t), измеренное катушкой Y-оси 16С. Каждый из результатов наземных измерений магнитного поля снабжается по меньшей мере меткой о времени, полученной от датчика GPS 138, и в некоторых вариантах осуществления также информацией о положении. Таким образом, бортовая и стационарная системы 112, 114 датчиков получают записи данных по трем каналам данных, причем каждый канал соответствует результату измерения магнитного поля, полученному соответствующей катушкой.
В компьютере 126 обработки сигналов записи данных по трем каналам от бортовой и стационарной систем 112, 114 объединяются в зависимости от данных по времени сигнала GPS, относящихся к каждой из записей для создания записей, которые включают шесть каналов оцифрованных данных по магнитному полю, причем каждая запись соответствует результатам измерений, осуществленных в сущности одновременно наземной и бортовой системами датчиков.
В одном примере варианта осуществления затем выполняется частотная обработка записей данных или посредством применения узкополосных фильтров, или посредством применения быстрых преобразований Фурье к многочисленным последовательным временным блокам (для не ограничивающего примера, каждый из временных блоков может составлять 0,5-2 секунды), что дает временную последовательность данных, которые представляют магнитное поле, измеренное каждой из соответствующих катушек датчиков на конкретных звуковых частотах. Эти данные включают реальное и мнимое числовое представление компоненты магнитного поля для каждой из осей X, Y и Z, измеренной в воздухе и на земле. Используя эту информацию, напряженность магнитного поля на конкретной частоте, которая измерена каждым из бортовых и наземных датчиков, можно определять и сравнивать для разных мест в области съемки. Некоторые частоты могут быть отфильтрованы - например, шум 60 Гц удаляется в некоторых вариантах осуществления.
Для примера, напряженность магнитного поля, измеренная бортовым узлом 10-1 катушек приемников на какой-то частоте в конкретный момент времени, может быть представлена как
|H(air)(f)|=√(Hz(air)(f)2+Hx(air)(f)2+Hy(air)(f)2)
и напряженность магнитного поля, измеренная наземным узлом 10-2 катушек приемников на той же частоте и в тот же момент времени, может быть представлена как:
|H(ground)(f)|=√(Hz(ground)(f)2+Hx(ground)(f)2+Hy(ground)(f)2)
Модули этих векторов не зависят от пространственных положений датчиков, и путем сравнения модулей векторов |H(air)(f)||H(ground)(f)| в различных точках съемки можно определить аномалии, которые указывают на возможные подземные тела, представляющие интерес. Для примера, в случае однородного рельефа модули векторов, измеренные в воздухе и на земле, будут в сущности идентичны, при условии, что отношение бортовых и наземных данных равно или близко к единице. Отклонение от этого уровня можно рассматривать как геофизические аномалии, причем отношение воздушных данных к наземным данным (|H(air)(f)|/|H(ground)(f)|) выше единицы указывает на возможное проводящее подземное (или рассеянное) тело, а ниже единицы указывает на менее проводящее тело.
Хотя вышеприведенный пример сосредоточен на сравнении модуля или напряженности магнитного поля вектора H(air)(f), измеренных бортовым узлом 13 датчиков относительно величины вектора магнитного поля H(ground)(f), которая измеряется пространственно отделенным узлом 15 датчиков, в некоторых примерах вариантов осуществления другие признаки векторов магнитного поля H(air)(f) и H(ground)(f) можно сравнить, чтобы определить, могут ли быть выявлены аномалии, которые предполагают наличие проводящего или рассеянного тела. Например, в дополнение к изменениям в относительном модуле векторов, изменения в относительных фазах ориентации векторов магнитных полей H(air)(f) и H(ground)(f) могут давать аномалии, которые предполагают наличие проводящего или рассеянного тела. Соответственно, в примерах вариантов осуществления можно сравнивать одно или больше из относительных модулей, фаз и ориентации векторов магнитного поля H(air)(f) и H(ground)(f), чтобы определить, зарегистрирована ли аномалия, указывающая на проводящее или рассеянное тело.
В еще одном примере варианта осуществления сравниваются фактические компоненты векторов и вычисляются инвариантные по высоте свойства соответствующих тензоров. Как только электромагнитная волна станет плоской для любой конкретной частоты, существует система координат, где 3D магнитный комплексный вектор {Mx, My, Mz} можно рассматривать как два двухмерных (2D) вектора, реальный и мнимый, например, Re(M)={Mu,Mv}, имеющих третью координатную компоненту, равную нулю (за исключением эффектов шума). Новая система координат может быть найдена с использованием известных способов векторной алгебры путем вращения системы координат, и полученные 2D векторы затем могут быть обработаны с использованием адаптированных способов, которые известны в обработке 2D электрических векторов. Например, операции обработки 2D электрических векторов используются в геофизике земли в магнитотеллурических способах - зондировании и профилировании (см., например, (1) Vozoff, К., 1972, The magnetotelluric method in the exploration of sedimentary basins (Магнитотеллурический способ в разведке осадочных бассейнов): Geophysics, 37, 98-141. и (2) Anav, A., Cantarano, S., Cermli-Irelli, P., и Pallotino, G.V., 1976, A correlation method for measurement of variable magnetic fields (Способ корреляции для измерения переменных магнитных полей): Inst. Elect, и Electron. Eng. Trans., Geosc. Elect., GE14, 106-114, которые настоящим включены по ссылке). Операции, применяемые к электрическим 2D векторам в этих способах, могут быть адаптированы для применения к магнитным 2D векторам. Одним из получаемых параметров является детерминанта отражающих матрицу отношений между магнитными векторами, получаемыми наземной системой датчиков и воздушной системой датчиков. Эта детерминанта не зависит от пространственного положения датчиков (инвариантна при вращении системы координат) и также она отражает отношение между энергиями совокупных сигналов в точках съемки на земле и в воздухе. Эта детерминанта также равна единице над однородными областями и отклоняется над любыми изменениями в поперечной проводимости.
Альтернативный способ обработки сигналов
Теперь будет описан альтернативный способ обработки сигналов, принятых бортовыми и наземными датчиками. Согласно другому примеру варианта осуществления бортовая система для геофизической разведки 110 измеряет магнитное поле в нескольких частотных диапазонах на системе 114 датчиков базовой станции и на бортовой системе 112 датчиков и выражает значение и фазу магнитных полей как сложные числа. Например, эти сложные числа могут являться результатом частотной обработки, упомянутой выше. Для каждой полосы частот система 110 оценивает матрицу 3×3, которая трансформирует поле базовой станции в поле бортовой станции. Эти оценки вычисляются по измеренными сигналам для каждого интервала времени от 0,4 до 1 с.
А=ТВ
где А - 3-вектор-столбец сложных чисел, наблюдаемое магнитное поле на бортовой системе 112 датчиков, в системе координат бортовой системы,
В - 3-вектор-столбец сложных чисел, наблюдаемое магнитное поле на системе 114 датчиков базовой станции, в системе координат Север-Восток-Вниз,
Т - 3×3 матрица передаточной функции.
Поскольку положение бортовой системы 112 произвольное, наблюдаемое поле поворачивается ортогональной матрицей относительно поля, которое наблюдалось бы в системе координат Север-Восток-Вниз.
А=RT0B
где R - 3×3 реальная ортогональная матрица, которая трансформирует вектор из системы координат Север-Восток-Вниз в систему координат бортовой системы,
Т0=R-1Т - матрица передаточной функции в координатах Север-Восток-Вниз.
Цель заключается в определении параметров Т0, которые могут быть вычислены из известного значения Т, не зная значения R. То есть получаемые параметры должны быть инвариантны при вращении или изменениях в положении бортовой системы 112 датчиков. Чтобы найти проводящие тела, данные обрабатываются для определения мест, где поле-источник (определенное с В) значительно усилилось или ослабло. Если бы в В была только одна компонента, отношение |А|/|В| было бы вращательно инвариантным параметром этого типа. Поскольку есть три компоненты В, может быть определен вектор ВМ, который дает наибольшее усиление.
Наибольшее возможное усиление можно определить путем разложения Т по сингулярным числам (см., например, http://en.wikipedia.org/wiki/Singular_value_decomposition). Разложение по сингулярным числам является набором матриц U, TS, V, которые соответствуют этим критериям:
Т=UTSV*
где U - унитарная матрица, т.е. U*U=UU*=1,
TS - диагональная матрица с реальными не отрицательными значениями,
V - унитарная матрица, т.е. V*V=VV*=1,
- обозначает сопряженную транспозицию.
(В случае не квадратной матрицы "диагональная" означает, что единственными элементами, отличными от нуля, являются те, для которых номер строки и номер колонки равны, как в случае квадратной матрицы.)
Отличные от нуля диагональные элементы TS являются сингулярными значениями. Если они размещены в убывающем порядке величины, то TS является уникальным. (Однако U и V не являются уникальными.)
Поскольку T0=R-1Т, то
T0=U0TSV*
где U0=R-1U - также унитарная матрица.
Итак, сингулярные значения Т и Т0 одинаковые, отсюда они инвариантны по отношению к вращению бортовой системы 112 датчиков. (Они также инвариантны по отношению к вращению системы 114 датчиков базовой станции.) Сингулярное значение с наибольшей величиной является наибольшим коэффициентом усиления. Квадраты отличных от нуля сингулярных значений Т являются характеристическими значениями Т*Т. Разложение по сингулярным значениям может быть вычислено с помощью стандартных широко известных программных модулей, например, function gsl_linalg_SV_decomp Научной библиотеки GNU, см. http://www.gnu.org/software/gsl/. Поскольку Bz (в магнитотеллурической теории) зависит от Вх и By, ранг Т равен максимум 2 без эффекта шума и ошибок и поэтому по меньшей мере один из его диагональных элементов должен быть пренебрежительно мало отличным от нуля.
Еще один вариант заключается в том, чтобы сделать Т матрицей 3×2 и вычислить сингулярные значения соответственно. В разложении по сингулярным значениям вся информация о фазе находится в U и V, которые не уникальны. Фаза элементов U и V может по меньшей мере в некоторых ситуациях проанализирована для получения значащей информации о фазовом сдвиге между системой 114 датчиков базовой станции и бортовой системы 112 датчиков. U и V могут быть разделены в унитарную матрицу, которая в некотором смысле является "нулевой фазой", и унитарную матрицу, которая является диагональной матрицей и содержит информацию по фазе.
U=U0UP, V=V0VP
где U0, V0 - унитарные матрицы "нулевой фазы",
UP, VP - диагональные унитарные матрицы.
Тогда
Т=U0UPTSVP*V0*=U0TPV0*
где TP=UPTSVP* - диагональная матрица, которая содержит сложные коэффициенты усиления, расположенные в порядке убывания.
Фаза U0 может быть минимизирована следующим образом:
UPjj=[Σk=1…3Ukj]/|Σk=1…3Ukj|, если Σk=1…3Ukj□0,
=1, if Σk=1…3Ukj=0.
U0ij=Uij/UPii.
где Xjj обозначает элемент матрицы X в строке i, колонке j.
То есть U0 получена путем умножения каждой колонки U на коэффициент единицы величины фазы, так что сумма каждой колонки U0 является неотрицательной реальной.
Аналогичный порядок можно использовать для минимизации фазы V0. Возможны и другие операции. Описанный порядок дает три параметра, инвариантных к вращению, диагональные элементы TP, которые содержат информацию по фазе и относятся к усилению первичного поля в присутствии подпочвенной геологической структуры.
В некоторых применениях желателен более точный набор параметров. Как сказано выше, ранг Т (и поэтому TP) равен максимум 2, за исключением эффекта шума и ошибок. Поскольку элементы TP расположены в порядке убывания величины, третий диагональный элемент будет пренебрежимо мало отличаться от нуля и может быть отброшен. Для получения единственного параметра, инвариантного к вращению, можно перемножить первый и второй параметры.
К=TP1TP2
где TPi - i-й диагональный элемент TP.
В отсутствие любых подпочвенных особенностей, магнитное поле везде равномерное. В таком случае TP1=TP2=1 и поэтому К=1. Ожидается, что над проводником параметры усиления будут иметь величину >1, таким образом |К|>1. Хотя детальное поведение параметра К будет сложным, в упрощенном смысле на присутствие проводника будет указывать положительная аномалия на профиле или карте параметра К.
Другой (и, возможно, более простой) алгоритм может быть использован для получения соотнесенного, хотя и не идентичного, единственного инвариантного параметра.
К=T1×Т2.
К'=K×Re(K)/|Re((K)|
где Ti - i-й вектор-столбец 3×3 матрицы Т передаточной функции.
Вращательная инвариантность этого альтернативного параметра К' очевидна, поскольку равенство Р=Q×R, произведение Q×R и длина (модуль) |Q| сохраняются при любом вращении базы любых векторов Q, R и их произведения Р. Сходство с параметром К делается очевидным путем принятия упрощающего приближения, что унитарные матрицы U0, V0 не являются "минимальной фазой", как сказано выше, но не имеют мнимой части и поэтому являются вращениями или отражениями. Поскольку К' инвариантен при вращении (и может менять знак на противоположный при отражениях), из этого следует, что его можно вычислить из TP.
К=TP1×TP2=[0,0,TP1TP2]
К'=TP1TP2=±К
где TPi - i-й диагональный элемент TP.
При упрощающем допущении, что U0 и V0 не имеют мнимой части, параметр К' является произведением этих двух параметров усиления, отличных от нуля, или является отрицательным.
Параметры К и К' являются примерами вариантов осуществления способа картирования подпочвенных структур с использованием природных источников и магнитных приемников путем вычисления и визуализации параметров, которые не зависят от любого вращения (включая вращение относительно не вертикальных осей) трехосной бортовой системы 112 датчиков и/или двух- или трехосной базовой системы 114 датчиков.
Таким образом будет понятно, что в вышеописанных вариантах осуществления отслеживания магнитного поля на низкой частоте можно выполнять и использовать измерения безотносительно к положению или вращению систем датчиков. В этом отношении система разведки инвариантна к вращению по отношению к независимым вращениям бортовой системы 112 и/или базовой станции 114 относительно любой оси, как вертикальной, так и не вертикальной.
В некоторых применениях системы для геофизической разведки 110 катушки 16А, 16В и 16С также могут быть смонтированы с использованием опорных конфигураций других типов, например, вместо того, чтобы каждая катушка была заключена в ее собственную секцию трубчатой рамы, катушки могут быть намотаны вокруг формирователей, расположенных в сферической защитной оболочке (например, такой, как описана в вышеупомянутом патенте США №6,876,202). Кроме того, катушки необязательно должны быть катушками с воздушным сердечником, например, они могут быть с проницаемым сердечником. В некоторых вариантах осуществления датчиками может быть что-то другое, чем катушки. Альтернативно, бортовой узел 10-1 катушек приемников и наземный узел 10-2 катушек могут быть реализованы с использованием технологии трехмерного сверхпроводящего магнитного датчика (SQUID) или малошумящего векторного магнитометра.
На Фиг.13 показан еще один пример варианта осуществления бортовой системы для геофизической разведки 200, которая по работе и конфигурации сходна с системой 110, за исключением тех различий, которые станут понятны из чертежей и последующего описания. В системе 200 с Фиг.3 стационарная система 114 датчиков системы 110 заменена вторым бортовым узлом 115 датчиков, который подвешен на том же летательном аппарате, что и первый узел 113, на соответствующем буксирном тросе 202, который длиннее буксирного троса 64. Хотя они и подвешены на одном летательном аппарате 26, первый и второй узлы 113 и 115 пространственно отделены друг от друга, и второй узел 115 датчиков находится на меньшей высоте. Функции наземного компьютера 123 сбора данных и по меньшей мере в некоторых конфигурациях компьютера 126 обработки данных интегрированы в бортовой компьютер 122. В случае однородного рельефа оба трехмерных узла 113, 115 датчиков будут принимать один и тот же сигнал AFMAG, но в присутствии локальных подземных проводников второе звуковое магнитное поле будет иметь большую напряженность на меньшей высоте, поскольку оно ближе к проводнику. Это различие можно обнаружить такой же обработкой сигнала, как и в первом примере, исключив слияние записей сигналов. Все сигналы собираются одновременно только одним компьютером 122 и затем могут быть обработаны в реальном времени.
Опрокидывание для системы AFMAG
В некоторых примерах вариантов осуществления узлы 10-1 и 10-2 катушек приемников могут альтернативно использоваться в системах типа AFMAG для геофизической разведки, которые зависят от измерений опрокидывания или угла наклона, как сказано, например, в вышеупомянутом патенте США №6,876,202. При таком применении датчики положения могут быть расположены на узлах 10-1 и 10-2 катушек приемников, так что ориентацию таких узлов можно обнаруживать и информацию по ориентации можно использовать в вычислениях углов наклона по сигналам, получаемым с узлов 10-1 и 10-2 катушек приемников. Например, один или несколько акселерометров могут быть прикреплены к узлам 10-1 и 10-2 для определения данных по положению. Альтернативно, три GPS приемника могут быть помещены в разнесенные места на узлах 10-1 и 10-2, чтобы отслеживать их положения.
В некоторых примерах вариантов осуществления и способы измерения опрокидывания, описанные, например, в патенте США №6,876,202, и способы обработки 3D векторов, описанные выше, могут быть включены в одну систему для геофизической разведки 110, где узлы 10-1 и 10-2 катушек приемников измеряют сигналы, требуемые для обоих типов вычислений.
Электромагнитная система во временной или частотной области
Узел 10 катушек приемников также может быть включен в активную систему для геофизической разведки, такую как электромагнитная система для геофизической разведки во временной области (TDEM) или электромагнитная система в частотной области (FDEM). Для примера, узел 10 катушек приемников может быть интегрирован в систему TDEM так, как сказано в патенте США №7,157,914. На Фиг.14 показан схематический вид бортовой системы разведки TDEM 200, которая включает катушку 204 передатчика и узел 10 катушек приемников (имеющий 3 ортогональные катушки 16А, 16В и 16С). Система разведки TDEM 200 может буксироваться летательным аппаратом 228, таким как самолет, вертолет, воздушный шар или дирижабль. По меньшей мере в некоторых примерах вариантов осуществления катушка 204 передатчика и узел 10 катушек приемников являются частью буксируемого узла 212, который буксирует летательный аппарат 228. В примере варианта осуществления, показанном на Фиг.14, катушка 204 передатчика и узел 10 катушек приемников в сущности концентрические, и катушка 204 передатчика смонтирована на раме, которая подвешена на нескольких опорных тросах 216, каждый из которых прикреплен к уникальной точке на окружности рамы катушки передатчика на одном конце и к общему буксирному тросу 215 на другом конце. Узел 10 катушек приемников поддерживается в центре последовательностью радиально проходящих тросов 214, которые проходят до рамы катушки передатчика. В одном примере варианта осуществления, когда при использовании катушка 204 передатчика размещена горизонтально с в сущности вертикальной дипольной осью, и узел 10 катушек приемников расположен в центре катушки 104 передатчика, причем ось первой катушки 16А приемника расположена в сущности в вертикальной плоскости, ось второй катушки 16В приемника расположена в сущности в горизонтальной плоскости, выровненной в направлении хода, и ось третьей катушки 16С приемника расположена в сущности в горизонтальной плоскости, выровненной под прямым углом к направлению хода.
Данные измерений с трех катушек приемников можно использовать для определения проводимости тел, расположенных в области разведки.
Специалистам в данной области техники будет понятно, что на практике могут быть осуществлены и другие варианты осуществления, помимо описанных выше, без нарушения объема изобретения. Поэтому возможны другие модификации.











Изобретение относится к геофизической разведке. Сущность: буксируемый узел катушек приемников включает несколько катушек приемников. Каждая катушка приемника размещена в соответственной секции трубчатой наружной рамы, которая определяет непрерывный проход, в котором проходит катушка приемника. Секции трубчатой наружной рамы соединены между собой для создания каркасной рамы, поддерживающей катушки приемников в постоянном положении относительно друг друга. С каркасной рамой соединен буксирный трос. 2 н. и 20 з. п. ф-лы, 16 ил. 
1. Буксируемый узел катушек приемников для геофизической разведки, включающий:
несколько катушек приемников, причем каждая катушка приемника размещена в соответственной секции трубчатой наружной рамы, которая определяет непрерывный проход, в котором проходит катушка приемника, секции трубчатой наружной рамы соединены между собой для создания каркасной рамы, поддерживающей катушки приемников в сущности в постоянном положении относительно друг друга; и
буксирный трос, соединенный с каркасной рамой для буксировки рамы, чтобы проводить геофизическую разведку.
2. Буксируемый узел катушек приемников по п.1, включающий по меньшей мере три катушки приемников, каждая из которых имеет соответственную дипольную ось, имеющую ориентацию, которая отличается от дипольной оси других катушек приемников.
3. Буксируемый узел катушек приемников по п.2, отличающийся тем, что дипольные оси трех катушек приемников в сущности ортогональны друг другу и пересекаются в общей центральной точке.
4. Буксируемый узел катушек приемников по п.2 или 3, отличающийся тем, что каркасная рама является восьмиугольником с соединениями между секциями рамы, расположенными на углах восьмиугольника.
5. Буксируемый узел катушек приемников по п.4, отличающийся тем, что трубчатые секции наружной рамы соединены между собой с возможностью разъединения, чтобы позволить разбирать каркасную раму на транспортируемые компоненты и снова собирать ее.
6. Буксируемый узел катушек приемников по п.5, отличающийся тем, что каждая из трубчатых секций наружной рамы включает полуцилиндрические секции, соединенные между собой с возможностью разъединения, которые проходят между углами восьмиугольника, и эти углы включают угловые секции, которые соединены с возможностью разъединения с прямыми трубчатыми частями.
7. Буксируемый узел катушек приемников по п.6, отличающийся тем, что каждая катушка приемника имеет четыре разнесенных элемента внутренней рамы, соединенные с ней, каждый из которых соединен с возможностью разъединения с соответственной стороной трубчатой секции наружной рамы, которая имеет проход, в котором проходит катушка приемника, так что каждую катушку приемника можно снять с каркасной рамы вместе с ее четырьмя элементами внутренней рамы и сложить в пучок, в котором четыре элемента внутренней рамы параллельны друг другу, и сохранить электрическую непрерывность катушки.
8. Буксируемый узел катушек приемников по п.1, отличающийся тем, что каждая катушка приемника упруго подвешена в проходе соответствующей ей трубчатой секции наружной рамы.
9. Буксируемый узел катушек приемников по п.8, отличающийся тем, что каждая катушка приемника поддерживается в соответственной секции внутренней рамы, которая упруго подвешена в проходе соответственной трубчатой секции наружной рамы катушки приемника.
10. Буксируемый узел катушек приемников по п.9, отличающийся тем, что для каждой катушки приемника упругие элементы проходят от внутренней стенки соответственной трубчатой секции наружной рамы до соответственной секции внутренней рамы.
11. Буксируемый узел катушек приемников по п.10, отличающийся тем, что упругие элементы расположены так, чтобы прилагать противоположно направленные силы к соответственной секции внутренней рамы для смещения к центру соответственной секции внутренней рамы внутри секции наружной рамы.
12. Буксируемый узел катушек приемников по п.11, включающий первый жесткий промежуточный элемент, прикрепленный к нескольким упругим элементам в месте между секцией внутренней рамы и секцией наружной рамы на одной стороне секции внутренней рамы, и второй жесткий промежуточный элемент, прикрепленный к другим нескольким упругим элементам в месте между секцией внутренней рамы и секцией наружной рамы на противоположной стороне секции внутренней рамы, причем эти жесткие промежуточные элементы обеспечивают массу, которая повышает изоляцию секции внутренней рамы от вибрации секции наружной рамы.
13. Буксируемый узел катушек приемников по п.12, отличающийся тем, что жестким промежуточным элементом является стержень.
14. Буксируемый узел катушек приемников для бортовой геофизической разведки, включающий:
первую, вторую и третью секции трубчатой рамы, причем каждая из секций рамы образует петлю, определяющую соответственный внутренний проход, и каждая из первой, второй и третьей секций трубчатой рамы соединена с другими секциями трубчатой рамы в разнесенных местах для формирования рамы буксируемого узла, в которой эти первая, вторая и третья секции трубчатой рамы поддерживаются в сущности в постоянном положении относительно друг друга; и
первую, вторую и третью катушки приемников для измерения сигналов магнитного поля, причем первая, вторая и третья катушки приемников размещены во внутренних проходах первой, второй и третьей секций трубчатой рамы соответственно и каждая из первой, второй и третьей катушек приемников имеет ориентацию, отличную от ориентации других катушек приемников.
15. Буксируемый узел катушек приемников по п.14, отличающийся тем, что дипольные оси трех катушек приемников в сущности пересекаются в общей центральной точке.
16. Буксируемый узел катушек приемников по п.14 или 15, отличающийся тем, что разнесенные места, в которых трубчатые секции рамы соединены между собой, расположены на углах рамы буксируемого узла.
17. Буксируемый узел катушек приемников по п.16, отличающийся тем, что каждая из первой, второй и третьей секций рамы образует квадратную петлю и соединены между собой так, что каждая из первой, второй и третьей катушек приемников имеет дипольную ось, которая в сущности ортогональна к дипольной оси каждой из двух других катушек приемников, и рама буксируемого узла является восьмиугольником.
18. Буксируемый узел катушек приемников по п.14, отличающийся тем, что первая, вторая и третья катушки приемников упруго подвешены во внутренних проходах первой, второй и третьей секций трубчатой рамы соответственно.
19. Буксируемый узел катушек приемников по п.14, включающий первую, вторую и третью секции внутренней рамы, причем каждая из секций внутренней рамы определяет проход для соответственной катушки, в котором соответственно расположены первая, вторая и третья катушки приемников, и причем каждая из первой, второй и третьей секций внутренней рамы упруго подвешена во внутренних проходах первой, второй и третьей секций трубчатой рамы соответственно.
20. Буксируемый узел катушек приемников по п.19, отличающийся тем, что каждая из первой, второй и третьей секций внутренней рамы упруго подвешена во внутренних проходах первой, второй и третьей трубчатых секций рамы соответственно посредством упругих элементов, которые проходят между трубчатыми секциями рамы и секциями внутренней рамы, и, кроме того, включающий удлиненные жесткие промежуточные элементы, каждый из которых соединен с несколькими упругими элементами в местах между трубчатыми секциями рамы и секциями внутренней рамы.
21. Буксируемый узел катушек приемников по п.14, отличающийся тем, что каждая из катушек приемников намотана в сущности в соответственной плоскости, и катушки являются катушками с воздушным сердечником, причем рама буксируемого узла является каркасной рамой с несколькими отверстиями, через которые может проходить воздух.
22. Буксируемый узел катушек приемников по п.14, отличающийся тем, что катушки приемников конфигурированы для измерения сигналов магнитного поля, исходящих из встречающихся в природе электромагнитных источников.
| RU 2005119284 A, 27.05.2006 | |||
| US 20030169045 A1, 11.09.2003 | |||
| US20080246484 A1, 09.10.2008 | |||
| US 20030094952 A1, 22.05.2003 | |||
| WO 2004046761 A1, 03,06.2004 |

