Настоящая заявка притязает на приоритет и преимущество предварительной патентной заявки США с серийным номером 61/264,762, поданной 27 ноября 2009 года.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0001] Варианты осуществления описанного изобретения относятся к области бортового геологического картирования и к системам приемников, используемым для такого картирования.
[0002] Электромагнитная съемка с активными источниками, такая как электромагнитная съемка во временной области (TDEM), является быстро развивающейся областью геофизической съемки. Она охватывает наземные и бортовые применения. Геологическое картирование TDEM включает измерение магнитного отклика земли на первичное магнитное поле, передаваемое системой съемки. Отношение между переданным полем и откликом используют для вычисления структуры электрического удельного сопротивления земли, по которой получают геологическую информацию.
[0003] Один пример системы и способа съемки TDEM раскрыт в патенте США №7,157,914.
[0004] Электромагнитную съемку с естественными источниками традиционно выполняют, используя наземные методы, такие как магнитотеллурический (МТ). В последнее время в практику вошла бортовая съемка естественных источников с использованием электромагнитных методов. В этих методах измеряют два или больше компонента ,встречающихся в природе случайных флуктуаций электромагнитного поля земли (возможно в разных местах) и вычисляют зависящие от частоты функции передачи между измеренными компонентами. В качестве способов с активными источниками функции передачи интерпретируются в смысле структуры удельной электропроводности земли, по которой получают геологическую информацию.
[0005] Один пример системы электромагнитной съемки с естественными источниками раскрыт в патенте США №6876202.
[0006] Система электромагнитной съемки с активными источниками имеет передатчик и приемник, тогда как система с естественными источниками имеет только приемник. Обычно передатчик включает катушку из одного или нескольких витков электрического провода. Когда электрический ток пропускают по проводу, передается магнитное поле. При съемке TDEM используют импульсный ток переменной полярности и отклик земли отслеживают во время "отключения" между импульсами тока передатчика.
[0007] Приемник или датчик обычно включает одну или несколько многовитковых катушек электрического провода. В присутствии изменяющегося магнитного поля на выводах каждой катушки появляется электрическое напряжение. Это напряжение может быть усилено и зарегистрировано. Катушки могут иметь разные ориентации, что делает их чувствительными к изменениям в компонентах магнитного поля, имеющих разные направления. При остальном равном чувствительность и уровень собственных шумов катушки приемника улучшаются с увеличением размера катушки. Сигналы, используемые в системах с естественными источниками, обычно слабее, требуют катушек приемников большего размера по сравнению с системами с активными источниками.
[0008] Реакцией на движение и вибрацию приемников, используемых в системах съемки с активными и естественными источниками, является источник значительного шума, особенно в турбулентной бортовой среде, который становится все более важным, когда частота сигнала снижается ниже 100 Гц. Крупный вклад в этот тип шума вносит движение катушки (или катушек) приемника относительно статического геомагнитного поля. Движение или вибрация, которые изменяют совокупный геомагнитный поток, проходящий через катушку приемника, приводят к появлению электрического напряжения на выводах катушки. В случае жесткой катушки приемника оно может быть вызвано вращением катушки. Никакая катушка приемника не является совершенно жесткой, так что изгиб катушки также вносит вклад в такие напряжения. Эти напряжения являются одним типом шума, который вносит помехи в желательный сигнал. Большое значение имеют способы снижения шума.
[0009] В некоторых системах электромагнитной съемки приемник чувствителен к изменениям в одном компоненте магнитного поля, обычно номинально вертикальном компоненте. Приемники, которые независимо измеряют изменения в двух или трех в сущности ортогональных компонентах магнитного поля, дают улучшенную геологическую информацию, но они больше по объему, чем одноосные приемники.
[0010] Желательны усовершенствованные системы приемников для бортовой геофизической съемки.
РАСКРЫТИЕ
[0011] В одном примере варианта осуществления представлена бортовая система геофизической съемки, которая включает: узел катушек приемника для буксировки воздушным судном, причем узел приемника включает по меньшей мере одну катушку приемника для отслеживания изменений в компоненте магнитного поля и систему отслеживания ориентации катушки приемника для отслеживания изменений в ориентации катушки приемника; а контроллер, принимающий сигналы, представляющие отслеженные изменения в этом компоненте магнитного поля, от катушки приемника и отслеженные изменения в ориентации от системы отслеживания ориентации катушки приемника и корректирующий отслеженные изменения в компоненте магнитного поля, чтобы выдать сигнал, который скорректирован по шуму, вызванному изменяющейся ориентацией катушки приемника в статическом геомагнитном поле.
[0012] В еще одном примере варианта осуществления представлен способ выполнения бортовой геофизической съемки, который включает: буксировку узла катушки приемника с помощью воздушного судна, причем узел приемника включает три катушки приемника, каждая из которых имеет соответственную ось катушки, которая поддерживается в сущности под известным углом относительно осей других катушек приемника; отслеживание с помощью каждой из катушек приемника отдельного компонента магнитного поля; отслеживание изменений в ориентации узла катушки приемника в статическом геомагнитном поле и коррекцию отслеженных изменений в компонентах магнитного поля, чтобы получить компоненты магнитного поля, которые скорректированы по шуму, вызванному изменившейся ориентацией катушек приемника в статическом геомагнитном поле.
[0013] В еще одном примере варианта осуществления представлен узел катушек приемника для буксировки воздушным судном для выполнения геофизической съемки, включающий полужесткую наружную оболочку, имеющую номинально вертикальное распространение, которое в сущности меньше, чем ее горизонтальное распространение, причем наружная оболочка вмещает многовитковую катушку приемника с воздушной центральной частью и по меньшей мере одну соленоидную катушку приемника, причем каждая катушка приемника отслеживает изменения в отдельном компоненте магнитного поля и имеет ось под известным углом к оси другой катушки приемника, и причем многовитковая катушка приемника с воздушной центральной частью имеет номинально вертикальную ось и соленоидная катушка приемника включает многовитковую обмотку соленоида с ферромагнитным сердечником и имеет горизонтальную ось.
[0014] В еще одном примере варианта осуществления представлен узел катушек приемника для буксировки воздушным судном при выполнении геофизической съемки, включающий наружную оболочку, включающую трубчатую наружную часть, определяющую многогранный или круглый контур, и поперечно выполненную часть, имеющую первый трубчатый поперечный элемент, проходящий через первый диаметр трубчатой наружной части, и второй трубчатый поперечный элемент, проходящий через второй диаметр трубчатой наружной части, причем первый диаметр и второй диаметр перпендикулярны друг другу; многовитковую катушку приемника с воздушной центральной частью, проходящую вокруг трубчатой наружной части; первую соленоидную катушку приемника, включающую многовитковую обмотку соленоида на ферромагнитном сердечнике и расположенную в первом трубчатом поперечном элементе; и вторую соленоидную катушку приемника, включающую многовитковую обмотку соленоида на ферромагнитном сердечнике и расположенную во втором трубчатом поперечном элементе, причем каждая из катушек приемника отслеживает изменения в отдельном компоненте магнитного поля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
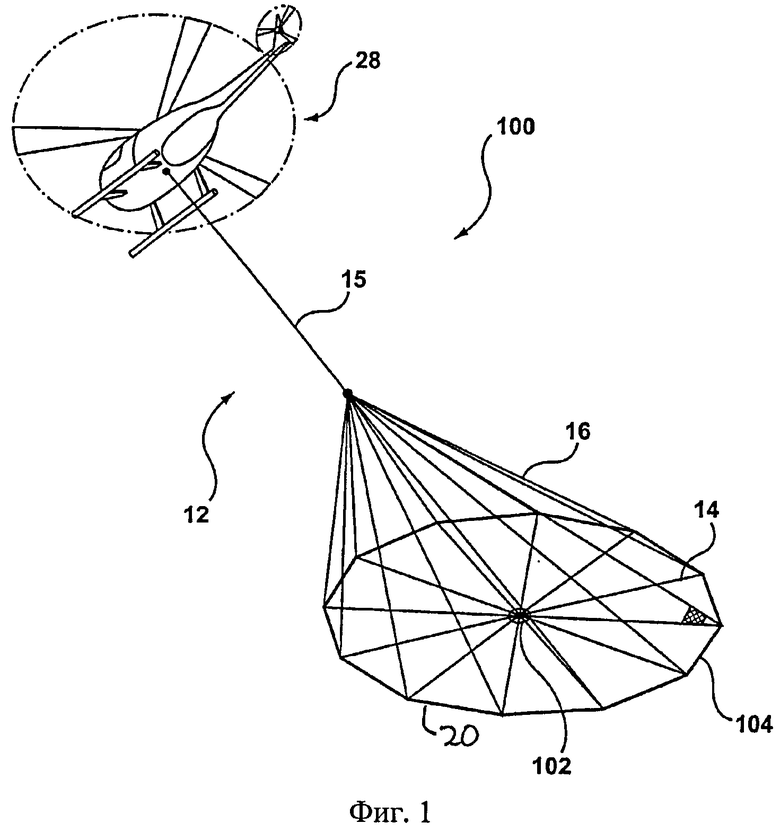
[0015] Фиг. 1 - перспективный схематический вид бортовой системы для электромагнитной съемки согласно одному примеру варианта осуществления изобретения.
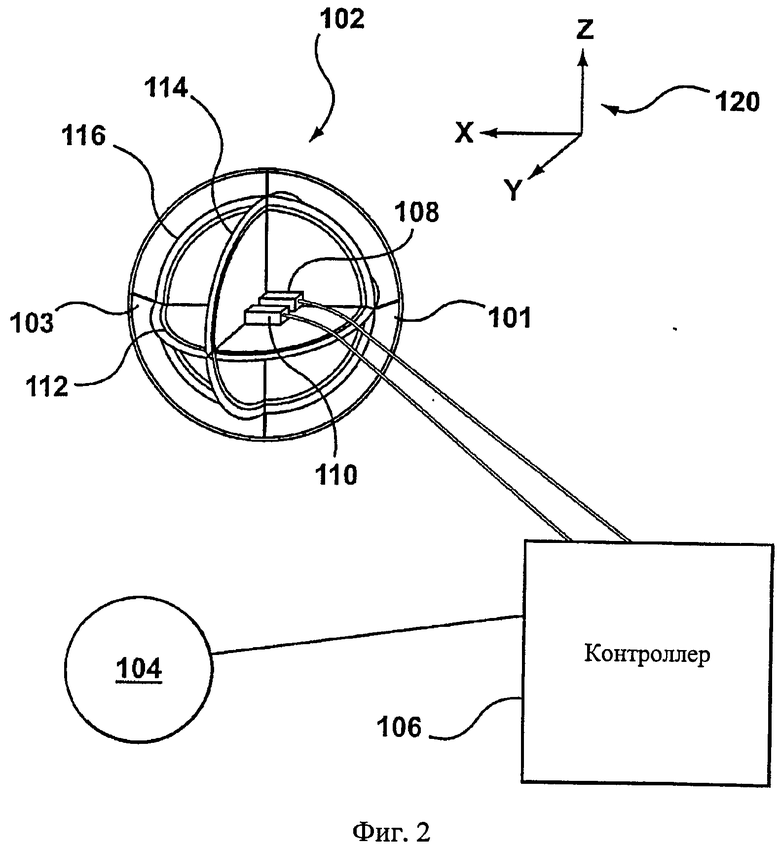
[0016] Фиг. 2 - иллюстративный вид системы приемника, которая может быть использована в бортовой системе для электромагнитной съемки с Фиг. 1.
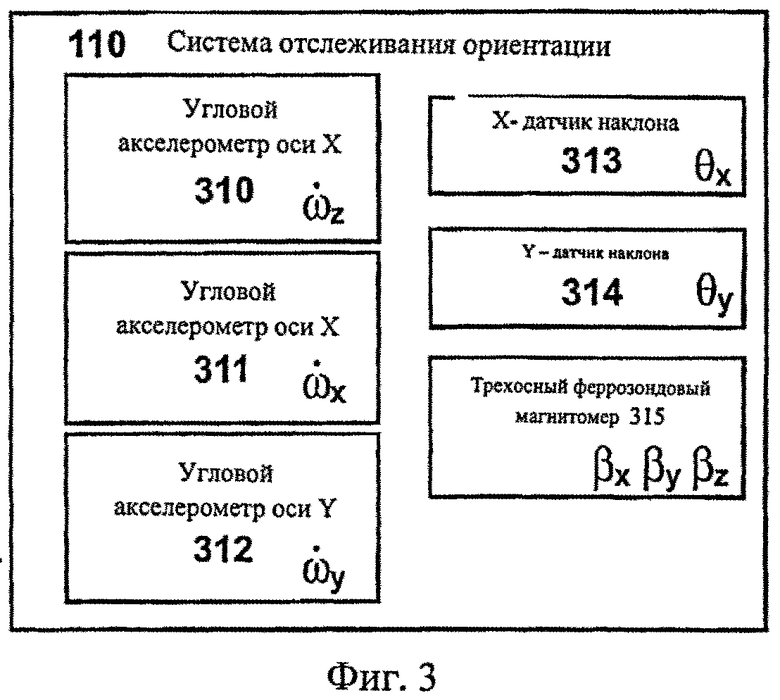
[0017] Фиг. 3 - блок-схема, представляющая систему отслеживания ориентации катушки приемника с Фиг. 2.
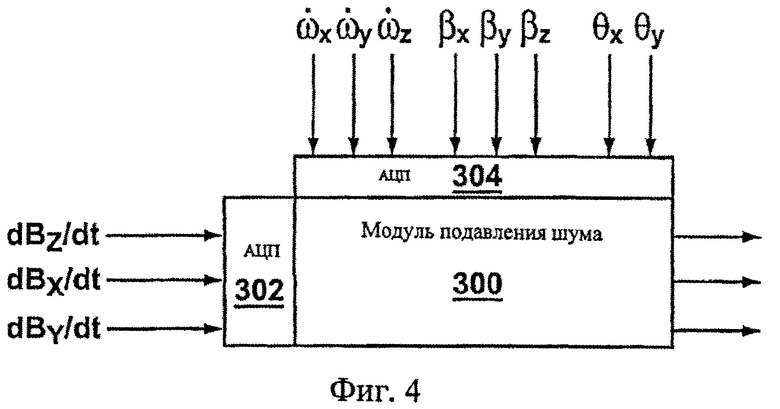
[0018] Фиг. 4 - блок-схема, представляющая модуль подавления шума, используемый с узлом катушки приемника с Фиг. 2.
[0019] Фиг. 5А - вид альтернативной системы катушки приемника, которая может быть использована в бортовой системе для электромагнитной съемки с Фиг. 1. Это вид в плане с удаленной верхней половиной наружной оболочки, чтобы показать внутреннюю оболочку и узел катушки.
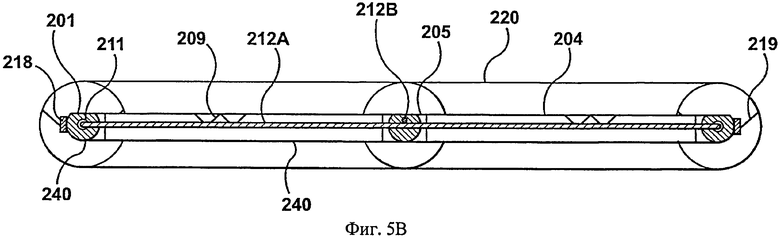
[0020] Фиг. 5В - местный вид сбоку альтернативной системы катушки приемника, показанной на Фиг. 5А, взятый по линиям А-А с Фиг. 5А.
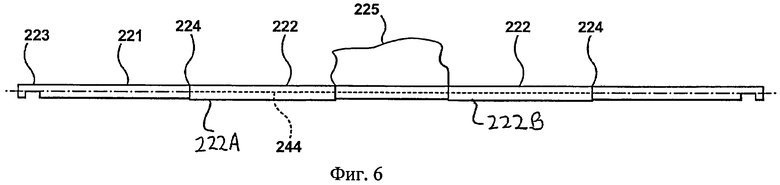
[0021] Фиг. 6 - схема соленоида с ферромагнитным сердечником, который является компонентом системы катушки приемника, показанной на Фиг. 5.
[0022] Фиг. 7 - схема альтернативной системы катушки приемника с тремя квадратными катушками, подвешенными в наружной оболочке в форме правильного восьмигранника.
ПОДРОБНОЕ ОПИСАНИЕ
[0023] В одном примере варианта осуществления система катушки приемника включает в сущности жесткий узел, несущий три катушки из электрического провода, имеющие взаимно ортогональные оси. Эти катушки отслеживают изменения в трех отдельных компонентах магнитного поля, что дает больше информации, чем одноосный приемник. Кроме того, этот узел несет систему отслеживания ориентации, включающую угловые акселерометры, трехосный феррозондовый магнитометр и двухосные датчики наклона. Этот жесткий узел упруго подвешен в неметаллической закрывающей наружной оболочке, которая защищает его от потока воздуха и в свою очередь подвешена прямо или косвенно с буксирующего воздушного судна. Эта упругая подвеска уменьшает движение и вибрацию, передаваемые на жесткий узел с наружной оболочки.
[0024] В этом первом примере варианта осуществления система обработки данных принимает выходные сигналы системы отслеживания ориентации. Она использует их для вычислений и вычитания из выходных сигналов каждой катушки приемника шума, который вызван вращательным движением катушек приемника в статическом геомагнитном поле. Она также использует их для объединения выходных сигналов трех катушек приемника с целью коррекции ошибок в каждом выходном сигнале приемника, которые происходят из-за статических отклонений узла катушки приемника от его номинальной ориентации.
[0025] Альтернативно, в первом примере варианта осуществления выходной сигнал феррозондового магнитометра может быть использован для объединения выходных сигналов трех катушек приемника, чтобы разделять сигнал, который будет отслеживаться катушкой приемника, ориентированной параллельно вектору геомагнитного поля. В этом разделенном сигнале шум из-за вращения в геомагнитном поле минимизирован, и изменения, вызванные отклонениями узла катушек приемника от его номинальной ориентации, подавлены.
[0026] Во втором примере варианта осуществления приемник включает полужесткий узел в форме многогранного или круглого контура, имеющего два перпендикулярных диаметра, в номинально горизонтальной плоскости. Наружная многогранная или круглая часть узла включает многовитковую катушку электрического провода, а многовитковые обмотки соленоидов с ферромагнитными сердечниками в форме стержня расположены на диаметрах и поперек в середине узла. Узел частично окружен внутренней оболочкой подобной формы и упруго подвешен в нескольких точках на ней. Внутренняя оболочка также несет шесть или больше акселерометров, расположенных по ее краю и ориентированных так, чтобы отслеживать вращения по трем независимым осям. Внутренняя оболочка полностью окружена наружной оболочкой подобной формы и упруго подвешена в нескольких точках на наружной оболочке, которая защищает внутреннюю оболочку и полужесткий узел от потока воздуха и в свою очередь подвешена прямо или косвенно с буксирующего воздушного судна. Упругие подвески уменьшают движение и вибрацию, передаваемые на полужесткий узел с наружной оболочки.
[0027] В этом втором примере варианта осуществления многоточечные подвески равномерно распределяют инерциальные нагрузки, уменьшая изгиб полужесткого узла и внутренней оболочки. Это улучшает их эффективную жесткость или позволяет достигнуть эквивалентной жесткости, используя меньше материала. Использование ферромагнитных сердечников для двух катушек, имеющих номинально горизонтальные оси, уменьшает размер приемника в номинально вертикальном направлении.
[0028] Во втором примере варианта осуществления система принимает выходные сигналы акселерометров. Она использует их в алгоритме подавления адаптивного шума, чтобы удалить шум из выходных сигналов каждой катушки приемника, который вызван движением катушек приемника в геомагнитном поле. Она также обрабатывает компонент постоянного тока в выходных сигналах некоторых из акселерометров (которые ориентированы в горизонтальных чувствительных направлениях), чтобы отслеживать наклон системы катушки приемника, и объединяет выходные сигналы трех катушек приемника, чтобы корректировать ошибки в каждом выходном сигнале приемника, которые происходят из-за статического наклона узла катушек приемника относительно его номинальной ориентации. По выбору информацию о направлении движения от системы навигации или других датчиков можно использовать для дополнительной коррекции отклонений от номинального курса.
[0029] Многовитковая катушка служит в качестве приемника изменений в магнитном поле, измеряя временную производную dB/dt магнитного поля. В случае системы TDEM с активными источниками катушка приемника используется для измерения убывания с течением времени вихревых токов в геологических структурах во время периода отключения после импульса передатчика. В случае системы с естественными источниками приемник отслеживает случайные флуктуации природного электромагнитного поля, на которые влияют геологические структуры. Напряжения катушек оцифровываются известным аналого-цифровым преобразователем (АЦП) и обрабатываются и сохраняются компьютером. Обработка и сохранение могут осуществляться во время сбора данных или после этого.
[0030] Помимо прочего, горизонтальное или вертикальное вращательное движение катушки приемника может вводить шум в измерения, осуществляемые системой приемника. Например, вращения катушки приемника с вертикальной осью по горизонтальной оси может индуцировать шум из-за движения катушки приемника относительно геомагнитного поля. Эффект шума проявляет тенденцию к росту, когда частота падает ниже 100 Гц, так что введение этого шума может устанавливать нижний предел частотного диапазона, используемого системой. Это в свою очередь может устанавливать пределы по глубине проникновения, предусмотренной системой съемки.
[0031] Отклонение катушки приемника от ее номинального положения может вносить ошибки в измерения. Например, наклон оси катушки приемника с горизонтальной осью будет заставлять ее реагировать на изменения в вертикальном магнитном поле в дополнение к намеченному горизонтальному полю, что может приводить к ошибкам в интерпретации результатов.
[0032] Примеры вариантов осуществления описаны здесь для многоосной системы катушек приемника и для подавления шума, чтобы уменьшить шум и ошибки, вводимые посредством динамического и статического горизонтального или вертикального вращения системы катушек приемника.
[0033] Для целей объяснения одного примера варианта осуществления на Фиг. 1 приведен схематический вид бортовой системы съемки TDEM 100, которая включает катушку передатчика 104 и узел или систему катушек приемника 102. Систему съемки TDEM 100 можно транспортировать воздушным судном 28, таким как самолет, вертолет, воздушный шар или дирижабль. По меньшей мере в некоторых примерах вариантов осуществления катушка передатчика 104 и система катушек приемника 102 являются частью буксируемого узла 12, который буксирует воздушное судно 28. В примере варианта осуществления, показанном на Фиг. 1, катушка передатчика 104 и система катушек приемника 102 в сущности концентрические, причем катушка передатчика 104 смонтирована на раме 20, которая подвешена на нескольких опорных кабелях или тросах 16, каждый из которых прикреплен к отдельной точке на окружности рамы катушки передатчика на одном конце и к общему буксирному кабелю 15 на другом конце. В одном примере варианта осуществления рама 20 катушки передатчика является простой многогранной рамой, которая приближается к кругу и выполнена из некоторого количества трубчатых сегментов, которые определяют непрерывный внутренний канал, в котором проходит катушка передатчика 104. В некоторых примерах вариантов осуществления тросы 16 включают по меньшей мере один кабель или трос, который поддерживает систему катушки приемника 102. Система катушки приемника может в некоторых примерах вариантов осуществления быть позиционирована в центре посредством последовательности радиально проходящих кабелей или тросов 14, которые проходят к раме 20 катушки передатчика. В одном примере варианта осуществления при использовании катушка передатчика 104 позиционирована горизонтально с в сущности вертикальной осью диполя, и система катушек приемника 102 расположена в центре катушки передатчика 104.
[0034] Конфигурация буксируемого узла, показанная на Фиг. 1, является только одним примером из многих возможных физических конфигураций, которые может иметь система съемки TDEM 100, например, в некоторых вариантах осуществления система 102 катушек приемника может поддерживаться отдельно от катушки передатчика 104, вместо того, чтобы являться частью одного буксируемого узла.
[0035] На Фиг. 2 система катушки приемника 102 показана более детально. Также на Фиг. 2 показан контроллер 106, который включен в систему съемки TDEM 100 и который связан с катушкой передатчика 104 и системой катушек приемника 102. Контроллер 106 включает, помимо прочего, один или несколько аналого-цифровых преобразователей для преобразования данных, получаемых от системы катушек приемника 102, возбуждающее устройство для возбуждения катушки передатчика 104 и компьютер для управления всей работой системы съемки TDEM 100 и обработки данных, принятых через компоненты системы съемки TDEM 100. Контроллер 106 также может включать систему альтиметра для отслеживания абсолютной и относительной высоты системы съемки TDEM 100. В одном примере варианта осуществления контроллер 106 расположен в корпусе воздушного судна. В некоторых примерах вариантов осуществления некоторые из функций контроллера 106 выполняются в месте, удаленном от воздушного судна, которое транспортирует катушку передатчика 104 и систему катушек приемника 102.
[0036] В одном примере варианта осуществления система катушек приемника 102 включает полностью закрывающую наружную оболочку 101. В этой оболочке упругая подвеска 103 поддерживает жесткий узел катушек приемника. Этот жесткий узел включает три в сущности плоские катушки, которые в сущности ортогональны друг другу. Например, в своей номинальной ориентации первая катушка или катушка Z-оси 112 имеет ось диполя, которая проходит по Z-оси, вторая катушка или катушка Х-оси 114 имеет ось диполя, ориентированную в направлении Х-оси, и третья катушка или катушка Y-оси 116 имеет ось диполя, которая ориентирована по направлению Y-оси. Как указано базовыми координатами X-Y-Z 120, показанными на Фиг. 2, Z-ось соответствует вертикали, Х-ось проходит горизонтально в направлении полета, и Y-ось проходит горизонтально поперек направлению полета. Во время эксплуатации катушки осей Z, X и Y 112, 114, 116 системы катушек приемника 102 движутся относительно базовой системы координат 120, и примеры вариантов осуществления направлены на удаление шума, вводимого таким движением.
[0037] В одном неограничивающем примере варианта осуществления каждая из катушек приемника Z, X и Y 112, 114 и 116 является катушкой с воздушной центральной частью, имеющей 100 витков по приблизительно 1 кв. метр каждый, но альтернативно можно использовать другие количества витков катушек и размеры катушек.
[0038] Выходные напряжения с Z-катушки 112, Х-катушки 114 и Y-катушки 116 подаются через соединительную коробку 108 в контроллер 106. Жесткий узел катушек приемника также включает систему 110 отслеживания ориентации катушек, которая собирает информацию по угловому положению и направлению движения жесткого узла для контроллера 106.
[0039] Как показано на Фиг. 3, в одном примере варианта осуществления система 110 отслеживания ориентации катушек приемника отслеживает ориентацию и скорость вращения жесткого узла катушек приемника. Система отслеживания 110 включает три угловых акселерометра 310, 311, 312 с осями, чувствительными к вращению, параллельными осям катушек приемника 112, 114 и 116. Полоса пропускания угловых акселерометров составляет 100 Гц или больше, так что она включает по меньшей мере нижний предел диапазона частот, который отслеживается катушками приемника 112, 114 и 116. Система отслеживания 110 включает трехосный феррозондовый магнитометр 315 с чувствительными осями катушек приемника 112, 114 и 116, который измеряет величину и направление геомагнитного поля относительно осей катушек приемника. Система отслеживания 110 включает датчики наклона 313 и 314, которые измеряют наклон жесткого узла катушек приемника относительно оси z (вертикальной), которая показана на системе базовых координат 120 (Фиг. 2). Полоса пропускания феррозондового магнитометра и датчиков наклона может быть существенно меньше, чем полоса пропускания катушек приемника и акселерометров. Система отслеживания ориентации также может включать другое оборудование для отслеживания ориентации, такое как многочисленные GPS-приемники, работающие в режиме дифференциальной фазы несущей, линейные акселерометры или гироскопные датчики для измерения скоростей движения системы приемника. Примеры вариантов осуществления могут включать все указанные здесь типы датчиков или их подгруппу.
[0040] Со ссылкой на Фиг. 4, контроллер 106 включает модуль подавления шума 300 (который может быть, например, реализован в подходяще конфигурированном компьютере) для подавления шума и коррекции выходных сигналов катушек приемника посредством аналого-цифровых преобразователей 302 от катушек приемника Z, X и Y 112, 114, 116, в зависимости от информации, полученной посредством аналого-цифровых преобразователей 304 от угловых акселерометров Z, X и Y 310, 311 и 312, датчиков наклона 313 и 314 и трехосного феррозондового магнитометра 315.
[0041] В модуле подавления шума 300 выходные сигналы угловых акселерометров обрабатываются известными способами, чтобы определить мгновенные значения угловых скоростей вращения узла катушки приемника по каждой из его осей. Эти скорости вращения объединяются с геомагнитным полем, измеренным феррозондовым магнитометром 315, для прогнозирования получаемых напряжений на выводах каждой катушки приемника, которые затем вычитаются из каждого оцифрованного выходного сигнала приемника, чтобы уменьшить эффект углового движения системы катушек приемника 102 в геомагнитном поле. На дополнительном этапе обработки выходные сигналы датчиков наклона 313, 314 и феррозондового магнитометра 315 обрабатываются для определения матрицы, которая поворачивает векторы в движущейся системе координат, определенной чувствительными осями катушек приемника 112, 114 и 116, в фиксированную систему координат 120. Эту матрицу затем используют для объединения выходных сигналов катушек приемника 112, 114 и 116, чтобы скорректировать выходной сигнал каждой катушки по отклонениям от ее номинальной ориентации.
[0042] В некоторых примерах вариантов осуществления напряжения, полученные от катушек приемника 112, 114 и 116, оцифровываются с частотой выборки от 50 до 200 кГц, и выборка выходных сигналов системы датчиков ориентации катушек осуществляется с частотой от 100 до 300 Гц. В некоторых примерах вариантов осуществления модуль подавления шума 300 обрабатывает оцифрованные выходные сигналы угловых акселерометров с использованием известных способов низкочастотной фильтрации и численной интеграции, чтобы оценить псевдовектор скорости углового вращения на каждом интервале выборки. Для более точной интеграции скоростей вращения можно использовать известные способы, основанные на представлении вращений по кватернионам. После нахождения оценки угловой скорости на каждом интервале выборки прогнозируемое напряжение на выходе каждой катушки приемника выражается как:
vS=(S×Ω)·В,
где vS - напряжение на катушке с чувствительным направлением S; S - вектор, представляющий отклик катушки, с величиной, равной эффективной области катушки, и направлением, таким же как чувствительное направление (ось) катушки; х обозначает векторное произведение; Ω - псевдовектор скорости углового вращения, полученный, как сказано выше, из выходных сигналов угловых акселерометров; · обозначает скалярное произведение (внутреннее произведение) и В - вектор геомагнитного поля, измеренного феррозондовым магнитометром. Эти векторы и псевдовектор выражены в системе координат узла катушки приемника. Соответственно, модуль подавления шума 300 обрабатывает оцифрованные выходные сигналы датчиков ориентации для каждого интервала выборки по вышеприведенной формуле, давая временную последовательность оценок шума при движении для каждой катушки приемника. Эта временная последовательность подвергается повторной выборке известными способами, чтобы получить частоту выборки оцифрованных выходных сигналов катушек приемника, масштабированных для учета коэффициентов усиления разных аналого-цифровых преобразователей и вычитаемых из выходных сигналов временной последовательности катушек приемника. Специалист в данной области может достигнуть подобных результатов с вариантами этого процесса.
[0043] В некоторых примерах вариантов осуществления выходные сигналы датчиков наклона используют для определения наклона узла катушки приемника относительно оси z (вертикальной) 120. С учетом углов наклона выходной сигнал феррозондового магнитометра 315 можно использовать для разделения горизонтального компонента геомагнитного поля, получая магнитный курс, этим полностью определяя ориентацию узла катушки приемника. Для того чтобы уменьшить ошибки, вызываемые действием ускорения на датчики наклона, в некоторых примерах вариантов осуществления долгосрочные значения положения и курса, определенные феррозондовым магнитометром 315 и датчиками наклона 313 и 314, должны быть объединены с использованием известных способов интеграции с краткосрочными изменениями ориентации, определенными по выходным сигналам угловых акселерометров 310, 311, 312. Данные по положению и курсу обрабатываются известными способами, чтобы определить матрицу, которая вращает векторы в движущейся системе координат, определенной чувствительными осями катушек приемника 112, 114 и 116, в фиксированной системе координат 120. Эту матрицу затем используют для объединения выходных сигналов катушек приемника 112, 114 и 116, чтобы скорректировать выходной сигнал каждой катушки по отклонениям от его номинальной ориентации.
[0044] В некоторых примерах вариантов осуществления модуль угловой компенсации 300 определяет углы между геомагнитным полем и осями трех катушек приемника 112, 114 и 116 и объединяет оцифрованные напряжения от катушек приемника для вычисления сигнала, который будет измерен катушкой приемника с осью, совмещенной с геомагнитным полем. Этот сигнал, измеренный совмещенной таким образом катушкой, не чувствителен к небольшим изменениям в ориентации катушки, что уменьшает воздействие вращений системы катушки приемника. Более конкретно, выходной сигнал от катушки 112 умножается на косинус угла между осью катушки и геомагнитным полем, также и для катушек 114 и 116, и сумма этих трех вкладов выводится модулем 300. Выходной сигнал феррозондового магнитометра прямо дает требуемые косинусы путем деления каждого из трех компонентов на величину вектора геомагнитного поля. В альтернативном варианте осуществления с использованием GPS-приемников вместо феррозондового магнитометра направление геомагнитного поля вычисляется по географическому положению места съемки с использованием стандартных формул (например, известных как "Международное эталонное геомагнитное поле") для ориентации геомагнитного поля. Затем его объединяют с измеренными положением и курсом системы катушки приемника, определенными по GPS-приемникам, чтобы вычислить требуемые углы.
[0045] Хотя три катушки приемника 112, 114 и 116 в описываемом варианте осуществления указаны как ортогональные друг к другу и в общем ориентированными по осям Z, X и Y, три катушки приемника могут быть расположены не под прямыми углами относительно друг друга при условии, что относительные углы известны и обработка информации, полученной от катушек и датчиков ориентации, соответственно скорректирована.
[0046] В некоторых примерах вариантов осуществления вышеуказанные подавление шума и коррекция ориентации также могут быть применены к системам бортовой съемки с естественными источниками, включая, например, бортовые системы магнитного зондирования на звуковой частоте (способ Афмаг), которые измеряют отклик земли на встречающиеся в природе события, такие как удары молний.
[0047] Система катушки приемника, показанная на Фиг. 1, может полностью реализовать вышеописанную функцию трех осей, снижения шума и коррекции ориентации. Существует ряд способов, которыми она может быть модифицирована так, чтобы более удобно и экономично использовать эти принципы для конкретных применений. Эти модификации могут быть использованы для повышения эффективной жесткости и уменьшения размера, количества и стоимости датчиков, а также силы движений, которые должны быть компенсированы. Эти модификации описаны в описанном ниже примере варианта осуществления.
[0048] Со ссылкой на пример варианта осуществления на Фиг. 5А и 5В здесь показан альтернативный вариант осуществления узла катушек приемника 102', который может быть использован в системе съемки 100 вместо системы катушек приемника 102, описанной выше. Узел катушек приемника 102' включает наружную трубчатую раму или оболочку 220, вмещающую внутреннюю раму или оболочку 240, в которой расположен внутренний узел катушки 242. На виде в плане с Фиг. 5А верхняя половина трубчатой наружной оболочки 220 удалена, чтобы показать внутреннюю оболочку 240 и внутренний узел катушки 242. В некоторых примерах вариантов осуществления верхняя половина трубчатой наружной оболочки 220 прикреплена с возможностью отсоединения к нижней половине, чтобы позволить разделять эти половины для обслуживания внутренней оболочки 240 и внутреннего узла катушки 242. В показанном варианте осуществления трубчатая наружная оболочка 220 включает наружную многогранную часть 250 с центральной частью 252 в форме X или t. На Фиг. 5А многогранная часть 250 восьмигранная и приближается к кругу, но она может принимать другие формы - например, она может быть круглой или квадратной или может иметь больше или меньше сторон, чем восемь. Полужесткая наружная оболочка 220 имеет номинально вертикальное распространение, которое существенно меньше чем ее горизонтальное распространение, дающее оболочке небольшой вертикальный профиль.
[0049] Внутренний узел катушки 242 включает многовитковый контур 211 с воздушной центральной частью с номинально вертикальной осью ("Z-катушка") и двумя соленоидными катушками 212А и 212В (в общем обозначены здесь как 212) с ферромагнитными сердечниками ("катушки с сердечниками") с взаимно ортогональными, номинально горизонтальными осями. Контур 211 с воздушной центральной частью расположен в основном в многогранной части 250 наружной оболочки 220, и катушки 212А, 212В с сердечниками расположены в основном в центральной части 252 в форме X или t. Соответственно, в примере варианта осуществления наружная оболочка 220 является полужесткой оболочкой, имеющей трубчатую наружную часть 250, определяющую многогранный или круглый контур, и поперечно выполненную часть 252, имеющую первый трубчатый поперечный элемент, проходящий по первому диаметру трубчатой наружной части 250, и второй трубчатый поперечный элемент, проходящий по второму диаметру трубчатой наружной части 250 и перпендикулярный первому диаметру. Наружная часть 250 и поперечная часть 252 расположены в номинально горизонтальной плоскости. Наружная многогранная или круглая часть 250 каждой оболочки включает многовитковую катушку электрического провода 211 с воздушной центральной частью, а катушки 212А и 212В, выполненные как многовитковые обмотки соленоида с ферромагнитными сердечниками в форме стержня, расположены каждая в соответственном поперечном элементе. Внутренняя оболочка 240 имеет форму, которая соответствует форме наружной оболочки 220. Внутренний узел катушки 242 с Фиг. 5А и 5В предназначен быть жестким, так что его вращательное движение имеет только три степени свободы. Поскольку он выполнен из компонентов, которые узкие (в противоположность конструкции с Фиг. 1), внутренний узел катушки 242 будет изгибаться в ответ на движение и вибрацию. Для минимизации такого изгиба внутренний узел катушки 242 подвешен с внутренней оболочки 240 на эластомерных шнурах 209 с большой степенью податливости. Шнуры 209 расположены так, чтобы поддерживать внутренний узел катушки 242 (и, в частности, каждую катушку с воздушной центральной частью или контур 211 и соленоидные катушки 212А и 212В) в нескольких точках, чтобы силы инерции равномерно действовали на внутренний узел катушки 242, этим уменьшая изгибные моменты, действующие на компоненты узла 242. Это повышает эффективную жесткость узла катушки приемника 242. Податливость шнуров 209 выбирают с учетом массы компонентов узла катушки приемника 242, чтобы движение и вибрация, передаваемые шнурами 209 на узел 242 от внутренней оболочки 240, уменьшались в частотном диапазоне отслеживаемых магнитных сигналов.
[0050] Пример одной из катушек с воздушной центральной частью 212А, 212В показан более детально на Фиг. 6 и состоит из жесткой пластиковой трубы 221, обмотки 222, которая проходит по пластиковой трубе 221 двумя отдельными частями 222А и 222В, соединенными последовательно проводом 225, и стержнеобразным ферромагнитным сердечником 244. Сердечник 244 схематически показан на Фиг. 6 пунктирной линией. Он может иметь, например, приблизительно круглое или квадратном поперечное сечение, которое может входить в пластиковую трубу 221, имея ширину, совместимую с внутренним диаметром пластиковой трубы 221. Сердечник 244 зафиксирован внутри пластиковой трубы 221 и по меньшей мере достаточно длинный, чтобы занимать в трубе 221 обе секции 222А и 222В обмотки 222. Пластиковая труба 221 имеет два выреза 223 на ее концах, которые входят в зацепление с контуром катушки Z 211. Одна катушка 212А входит в зацепление и прикреплена к контуру катушки Z 211 снизу, и другая катушка 212В входит в зацепление и прикреплена к контуру катушки Z 211 сверху, так что катушки 212А, 212В входят в контакт друг с другом и пересекаются в центре узла катушки приемника 102'. Разнесенные секции 222А, 222В каждой катушки 212А, 212В расположены на противоположных сторонах центра узла катушки приемника 102'. В одном примере варианта осуществления ферромагнитный сердечник 244 выполнен из материала, который имеет минимальную магнитострикцию, чтобы снижать шум, создаваемый изгибом сердечника. В случае системы TDEM сердечник 244 обработан для минимизации его тенденции приобретать остаточную намагниченность в ответ на передаваемое поле. В других примерах вариантов осуществления механические детали катушек 212А, 212В с сердечником и их установка могут отличаться отданного примера варианта осуществления.
[0051] Снова со ссылкой на Фиг. 5А, внутренняя оболочка 240 выполнена из стандартных неметаллических трубных секций 202 и 204, колен 203, тройников 201 и крестовины 205. В некоторых примерах вариантов осуществления после сборки часть верхней поверхности внутренней оболочки 240 вырезают, чтобы позволить установить шнуры подвески 209 и внутренний узел катушки 242. Это создает легкую и относительно жесткую конструкцию. Возможны и другие способы и материалы изготовления. Например, функция внутренней оболочки 240 может быть реализована в форме одной или нескольких каркасных конструкций или стержней, которые будут способствовать изоляции внутреннего узла катушки 242 от движения наружной оболочки 220.
[0052] В одном неограничивающем примере варианта осуществления в системе TDEM с активными источниками полный диаметр наружной оболочки 220 составляет 1,3 м и диаметр трубчатых компонентов наружной оболочки (диаметры и сегменты трубчатого многогранного периметра) составляет 0,16 м. Диаметр трубчатых компонентов внутренней оболочки составляет 60 мм. Диаметр пластиковых труб 221 составляет 16 мм. В других вариантах осуществления могут быть использованы другие размеры - например, наружная оболочка 220 может иметь диаметр больше или меньше чем 1,3 м, и ее трубчатые компоненты могут иметь диаметр больше или меньше чем 0,16 м.
[0053] Хотя внутренняя оболочка 240 более жесткая, чем внутренний узел катушки 242, она будет изгибаться до некоторой степени, и этот изгиб будет передаваться в некоторой степени на внутренний узел катушки 242. Для минимизации такого изгиба и уменьшения движения и вибрации внутренняя оболочка 240 подвешена на наружной оболочке 220 посредством высокоподатливых групп эластомерных шнуров 219. Шнуры 219 выбирают по тем же соображениям, что и для шнуров подвески 209 внутреннего узла катушки, упомянутых выше.
[0054] В одном примере варианта осуществления движение внутренней оболочки 242 отслеживается системой отслеживания ориентации катушки приемника, включающей, например, двухосные акселерометры 218, один из которых прикреплен к внутренней оболочке 242 рядом с концом одной из катушек с сердечником 212А и другой из которых прикреплен к внутренней оболочке 242 рядом с концом другой катушки с сердечником 212 В. Каждый акселерометр 218 имеет одну чувствительную ось, которая соосна (т.е. номинально вертикальна) и другую ось, которая тангенциальна (т.е. параллельна ближайшему сегменту контура Z-катушки 211).
[0055] До степени, в которой внутренняя оболочка 242 жесткая, ее вращательное ускорение можно измерить, взяв разницу между соответственно выбранными парами выходных сигналов акселерометров 218, расположенных на противоположных концах диаметра. До степени, в которой внутренняя оболочка 242 и внутренний узел катушки 242 жесткие и шнуры подвески 209 линейные и упругие, для любой определенной скорости и оси вращения существует передаточная функция, которая соотносит вращение внутреннего узла катушек приемника 242 с вращением внутренней оболочки 242. Также существует передаточная функция (которая зависит от геомагнитного поля), которая соотносит шум, создаваемый в катушках приемника 211, 212А, 212В (вращением в геомагнитном поле), с вращением внутреннего узла катушек приемника 242. Из этого следует, что существуют составные передаточные функции, которые соотносят выходные сигналы акселерометра 218 с шумом, создаваемым в каждой катушке приемника 211, 212А, 212В при вращении. Известные способы адаптивного подавления шума используют для выявления этих передаточных функций, отслеживания их изменений как изменений параметров системы и вычитания шума из выходных сигналов катушек приемника.
[0056] В данном примере варианта осуществления с Фиг. 5А и 5В аналого-цифровой преобразователь 304 отличается от АЦП, описанного выше по отношению к Фиг. 4, тем, что он имеет входной сигнал для каждого из двухосных акселерометров 218. Каждый входной сигнал оцифровывается и снова дискретизируется, чтобы получить скорость выборки, равную таковой у аналого-цифрового преобразователя 302. Временная последовательность, полученная от каждого акселерометра, обрабатывается с использованием цифровых операторов конечной импульсной характеристики, по одному для каждого канала катушки приемника, чтобы получить временную последовательность подавления шума. Временные последовательности подавления шума вычитаются из соответствующих им временных последовательностей, полученных от катушек приемника. Коэффициенты операторов конечной импульсной характеристики непрерывно корректируются, чтобы устранить шум во временных последовательностях катушек приемника, с использованием способов адаптивного подавления шума (смотрите, например, Б.Уидроу и др. (В. Widrow et al.), "Адаптивное подавление шума: Принципы и области применения", Proc. IEEE, vol.63, pp.1692-1716, Dec. 1975). Этот тип обработки "во временной области" наиболее подходит для активного источника при применении TDEM.
[0057] В еще одном примере варианта осуществления все цифровые временные последовательности, полученные из выходных сигналов акселерометров 218 и напряжений с катушек приемника 211, 212А, 212В, делят на перекрывающиеся временные окна, и для вычисления комплексных преобразований Фурье в отношении сегментов временных последовательностей в каждом временном окне используют известные способы. На каждой представляющей интерес частоте преобразования Фурье для группы последовательных временных окон обрабатывают для вычисления ковариационной матрицы. Эту ковариационную матрицу используют для удаления из преобразований Фурье выходного сигнала каждой катушки приемника, компонента, который коррелируется с выходными сигналами акселерометров. Специалист в данной области поймет, что этот тип подавления шума в "частотной области" эквивалентен обработке во "временной области", описанной в предыдущем абзаце, и подходит для применений с естественными источниками.
[0058] Внутренний узел катушек приемника 242 и внутренняя оболочка 240 не жесткие, так что изгиб и вибрация также будут вносить вклад в шум в выходные сигналы катушек приемника 211, 212А, 212В. В той степени, в которой эти изгиб и вибрация корре-лируются с выходными сигналами акселерометров, адаптивные способы подавления шума будут корректировать вычисленные передаточные функции, так что этот компонент шума будет частично подавлен.
[0059] В примере варианта осуществления с Фиг. 5А и 5В акселерометры 218 с горизонтальными осями можно использовать для измерения наклона внутренней оболочки 240. Коэффициенты процесса адаптивного подавления шума, описанные выше, могут быть, по выбору, обработаны для определения направления геомагнитного поля. Набор коэффициентов, коррелирующих скорость вращения с шумом в выходных сигналах катушек приемника, может быть решен, чтобы найти ось вращения, которая вызывает минимум шума. Направление этой оси является оценкой направления геомагнитного поля, и ее горизонтальный компонент является оценкой курса. Информацию по наклону и курсу можно использовать, как сказано выше, чтобы скорректировать выходной сигнал каждой катушки по отклонениям от ее номинальной ориентации. Альтернативно, можно использовать другие источники информации по курсу, такие как GPS-приемники или феррозондовый магнитометр.
[0060] Пример варианта осуществления с Фиг. 5А и 5В предлагает низкопрофильный трехосный узел катушки и может быть особенно полезным в случае системы приемника с многими осями, который должен буксироваться воздушным судном с неподвижным крылом. При взлете и посадке исследовательского воздушного судна с неподвижным крылом буксируемое средство ("гондола"), содержащее узел катушек приемника, должно быть заведено под фюзеляж воздушного судна. Его размер по вертикали ограничен, поскольку оно не должно касаться земли при взлете и посадке. Конфигурация с Фиг. 5А и 5В минимизирует размер по вертикали системы катушки приемника. В таком варианте осуществления может быть предпочтительным использование другой формы для наружного контура, например прямоугольной, вместо показанной восьмигранной формы, без изменения принципа этого способа.
[0061] Пример варианта осуществления с Фиг. 5А и 5В применяет те же принципы, что и вариант осуществления с Фиг. 2. Сочетание контура Z-оси 211 с катушками с сердечником 212А, 212В для горизонтальных осей позволяет уменьшить узел приемника в вертикальном направлении и сделать его легче. Использование двойной подвески с многоточечной опорой для внутреннего узла катушки 242 и внутренней оболочки 240 улучшает эффективную жесткость узла и обеспечивает повышенное (двухступенчатое) ослабление движения на катушке приемника. Использование адаптивных методов подавления шума позволяет использовать только один тип датчиков движения и позволяет устранить электромагнитный шум, создаваемый некоторыми датчиками движения (особенно феррозондовыми магнитометрами). Установка датчиков положения или движения на внутренней оболочке 240 вместо внутреннего узла катушки 242 увеличивает амплитуду выходных сигналов акселерометров, так что определение шума акселерометров становится легче.
[0062] В некоторых применениях пример варианта осуществления с Фиг. 5А и 5В с его пониженной жесткостью внутреннего узла катушки 242 влияет на точность удаления шума. Датчики не позволяют прямо отслеживать направление геомагнитного поля. Катушки с сердечником 212 могут создавать шум в результате магнитострикционного свойства сердечника, и в применениях TDEM остаточная намагниченность сердечника в ответ на поле передатчика может влиять на измерения. Некоторые примеры вариантов осуществления поэтому могут иметь некоторые признаки, как у варианта осуществления с Фиг. 1, в сочетании с другими признаками с Фиг. 5А и 5В, в зависимости от конкретного применения. Кроме того, некоторые варианты осуществления могут достигать преимуществ варианта осуществления с Фиг. 5А/5В при меньшем наборе датчиков. Акселерометры могут быть установлены прямо на катушки приемника 211 и 212А, 212В вместо внутренней оболочки 240. Меньший набор акселерометров может позволить значительно снизить шум при использовании адаптивных методов подавления шума. В одноосной (Z-ось) системе катушки приемника можно использовать датчики движения с адаптивным подавлением шума для снижения шума.
[0063] Даже без датчиков движения любого типа данные по трем осям, собранные в полете, могут быть обработаны с использованием приближения, что катушка приемника горизонтальная и что ее направление такое же как курс воздушного судна или направление движения. Для большей точности воздушное судно может охватывать область съемки полетами по серии параллельных линий, где полет по каждой линии осуществляется в направлении, противоположном направлению полета по непосредственно соседним линиям. Отклонение датчика от его номинальной ориентации вызовет последовательные различия между результатами, измеренными на одной линии и непосредственно соседних линиях, полет по которым проходил в противоположном направлении. Эти различия могут быть проанализированы, чтобы определить наклон и курс приемника относительно направления полета, что минимизирует эти различия, и данные могут быть скорректированы по полученной таким образом ориентации.
[0064] В одном примере варианта осуществления, показанном на Фиг. 7, трехосная система катушки приемника 230 для системы съемки с естественными источниками включает три квадратные катушки шириной приблизительно 3 м в полужестком каркасном узле 231, имеющем форму правильного восьмигранника, подвешенном на и заключенном в наружной оболочке 232 подобной формы. Возможны многие конфигурации датчиков движения. В одном примере варианта осуществления пара акселерометров расположена на каждой из шести вершин 233 на узле катушек приемника, причем их чувствительные оси перпендикулярны друг другу и линии из вершины до центра восьмигранника. Используются адаптивные методы подавления шума с выходными сигналами акселерометров в качестве шумовых выборок, чтобы удалить шум из выходных сигналов катушек приемника. Помимо этого, ориентацию каждой катушки относительно вертикали определяют по компоненту постоянного тока в выходных сигналах акселерометров.
[0065] В одном примере варианта осуществления использована одна катушка приемника. Она имеет 8 м в поперечнике и подобна по форме варианту осуществления с Фиг. 5А/5В, но без двух катушек с сердечником или сегментов оболочек (расположенных по диаметрам Z-катушки), которые их окружают. Пары акселерометров установлены на трех или больше вершинах контура с их чувствительными осями, совмещенными в вертикальном и радиальном направлениях, так что они будут реагировать на жесткие вращения, а также на изгибные движения узла катушки приемника. Используют адаптивные методы подавления шума с выходными сигналами акселерометров в качестве шумовых выборок, чтобы удалить шум из выходных сигналов катушки приемника. Помимо этого, ориентацию катушки относительно вертикали определяют по компоненту постоянного тока в выходных сигналах акселерометров.
[0066] Конкретные датчики, используемые в описанных примерах вариантов осуществления, могут быть заменены датчиками других типов. В некоторых вариантах осуществления вращательное движение, отслеживаемое парой акселерометров, ориентированных в одном направлении, но расположенных на противоположных сторонах узла катушек приемника, может быть детектировано одним датчиком угловой скорости. В некоторых вариантах осуществления геомагнитное поле, отслеживаемое феррозондовым магнитометром, вместо этого может быть вычислено по известным моделям поля Земли (таким как модель Международного геомагнитного эталонного поля) с использованием информации по направлению, полученном с двух GPS-приемников, расположенных на системе приемника, или (более приблизительно) с использованием информации по курсу, полученному с одного GPS-приемника, расположенного на буксирующем воздушном судне.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НЕСКОЛЬКИХ КАТУШЕК ПРИЕМНИКОВ ДЛЯ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ | 2009 |
|
RU2523106C2 |
| КОМПЕНСАЦИОННАЯ КАТУШКА И СИСТЕМА ДЛЯ ИЗМЕРЕНИЙ В-ПОЛЯ И УСТРОЙСТВО ДЛЯ ВРЕМЕННЫХ ЭЛЕКТРОМАГНИТНЫХ ИЗМЕРЕНИЙ | 2009 |
|
RU2557370C2 |
| КАЛИБРОВАННАЯ СИСТЕМА ДЛЯ ЭЛЕКТРОМАГНИТНОЙ СЪЕМКИ | 2012 |
|
RU2634080C2 |
| ГЕОФИЗИЧЕСКАЯ РАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ ВРАЩАТЕЛЬНО ИНВАРИАНТНЫХ ПАРАМЕТРОВ ПРИРОДНЫХ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ | 2009 |
|
RU2511703C2 |
| БУКСИРУЕМЫЙ УЗЕЛ ДЛЯ ВОЗДУШНОГО СУДНА С НЕПОДВИЖНЫМ КРЫЛОМ ДЛЯ ГЕОФИЗИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2529584C2 |
| ПРЕОБРАЗОВАТЕЛЬ (ВАРИАНТЫ) | 2005 |
|
RU2298802C2 |
| СИСТЕМА И УСТРОЙСТВО ПРИЕМНОЙ КАТУШКИ С ДВОЙНОЙ ПОДВЕСКОЙ | 2009 |
|
RU2529822C2 |
| УСТРОЙСТВО И СПОСОБ СБОРА ДАННЫХ | 2018 |
|
RU2771749C2 |
| СИСТЕМА АЭРОЭЛЕКТРОМАГНИТНОЙ СЪЕМКИ ВО ВРЕМЕННОЙ ОБЛАСТИ, МЕТОД И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ПОЛУЧЕНИЯ ДАННЫХ | 2003 |
|
RU2383905C2 |
| СИСТЕМА АЭРОЭЛЕКТРОМАГНИТНОЙ СЪЕМКИ ВО ВРЕМЕННОЙ ОБЛАСТИ, ВКЛЮЧАЮЩАЯ БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ АЭРОЭЛЕКТРОМАГНИТНОЙ СЪЕМКИ | 2003 |
|
RU2454684C2 |

Изобретение относится к бортовой геофизической съемке. Сущность: узел катушек приемника включает полужесткую наружную оболочку, имеющую вертикальную протяженность, которая меньше, чем ее горизонтальная протяженность. Наружная оболочка вмещает многовитковую катушку приемника с воздушной центральной частью и по меньшей мере одну соленоидную катушку приемника. Каждая катушка приемника отслеживает изменения в отдельном компоненте магнитного поля и имеет ось под известным углом к оси другой катушки приемника. Многовитковая катушка приемника с воздушной центральной частью имеет вертикальную ось. Соленоидная катушка приемника включает многовитковую обмотку соленоида с ферромагнитным сердечником и имеет горизонтальную ось. Во втором варианте выполнения узел катушек содержит две соленоидных катушек приемника. При этом многовитковая катушка приемника с воздушной центральной частью проходит вокруг трубчатой наружной части оболочки. Первая и вторая соленоидные катушки приемника поддерживаются в известных положениях относительно катушки приемника с воздушной центральной частью. 2 н. и 13 з.п. ф-лы, 7 ил.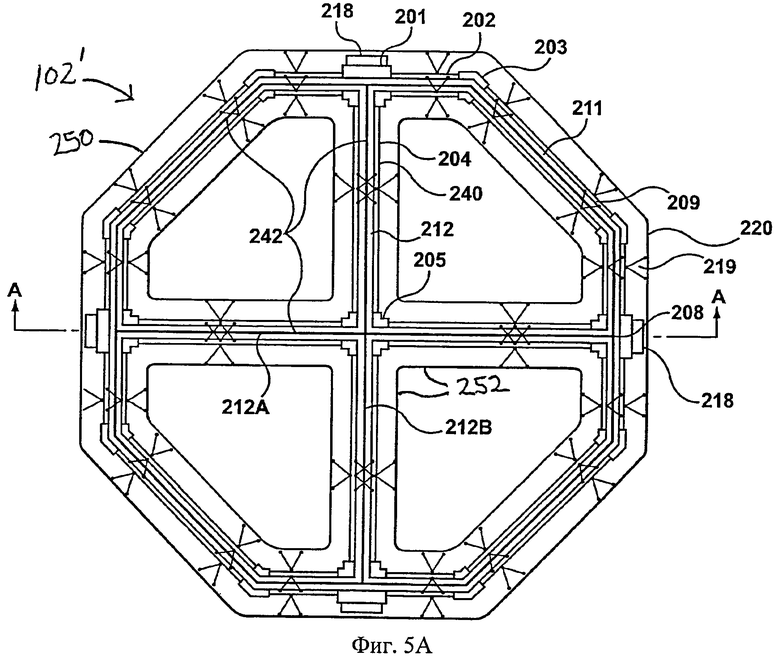
1. Узел катушек приемника для буксировки воздушным судном при выполнении геофизической съемки, включающий полужесткую наружную оболочку, имеющую номинально вертикальную протяженность, которая в сущности меньше чем ее горизонтальная протяженность, причем наружная оболочка вмещает многовитковую катушку приемника с воздушной центральной частью и по меньшей мере одну соленоидную катушку приемника, каждая катушка приемника отслеживает изменения в отдельном компоненте магнитного поля и имеет ось под известным углом к оси другой катушки приемника, отличающийся тем, что многовитковая катушка приемника с воздушной центральной частью имеет номинально вертикальную ось и соленоидная катушка приемника включает многовитковую обмотку соленоида с ферромагнитным сердечником и имеет горизонтальную ось.
2. Узел катушек приемника по п. 1, в котором наружная оболочка включает как часть трубчатый контур, определяющую многогранный или круглый контур, в котором расположена многовитковая катушка приемника с воздушной центральной частью.
3. Узел катушек приемника по п. 2, включающий
еще одну соленоидную катушку приемника, включающую многовитковую обмотку соленоида с ферромагнитным сердечником и имеющую горизонтальную ось, причем эта еще одна соленоидная катушка приемника отслеживает изменения в компоненте магнитного поля, отличном от других катушек приемника, и имеет ось под известным углом к осям других катушек приемника;
наружную оболочку, включающую поперечно выполненную часть, имеющую первый трубчатый поперечный элемент, проходящий через первый диаметр трубчатого контура, и второй трубчатый поперечный элемент, проходящий через второй диаметр трубчатого контура, причем первый диаметр и второй диаметр перпендикулярны друг другу,
причем одна из соленоидных катушек приемника расположена в первом трубчатом поперечном элементе и другая из соленоидных катушек приемника расположена во втором трубчатом поперечном элементе.
4. Узел катушек приемника по п. 3, отличающийся тем, что каждая из катушек приемника упруго подвешена на внутренней полужесткой раме, которая в свою очередь упруго подвешена в наружной оболочке.
5. Узел катушек приемника по п. 4, отличающийся тем, что трубчатый контур и крестовая часть находятся в сущности в общей плоскости и катушки приемника имеют взаимно ортогональные оси.
6. Узел катушек приемника по любому из пп. 1-5, кроме того включающий катушку передатчика для генерации изменяющегося по времени импульсного сигнала, имеющего последовательные периоды включения и отключения, причем катушки приемника отслеживают изменения в компонентах магнитного поля во время периодов отключения катушки передатчика.
7. Узел катушек приемника по любому из пп. 1-5, отличающийся тем, что изменения в компонентах магнитного поля, отслеживаемые катушками приемника, являются встречающимися в природе случайными флуктуациями магнитного поля.
8. Узел катушек приемника для буксировки воздушным судном при выполнении геофизической съемки, включающий:
наружную оболочку, включающую трубчатую наружную часть, определяющую многогранный или круглый контур;
многовитковую катушку приемника с воздушной центральной частью, проходящую вокруг трубчатой наружной части;
первую соленоидную катушку приемника, включающую многовитковые обмотки соленоида на ферромагнитном сердечнике и поддерживаемую в известном положении относительно катушки приемника с воздушной центральной частью;
вторую соленоидную катушку приемника, включающую многовитковые обмотки соленоида на ферромагнитном сердечнике и поддерживаемую в известном положении относительно катушки приемника с воздушной центральной частью и первой соленоидной катушки приемника,
причем каждая из катушек приемника отслеживает изменения в отдельном компоненте магнитного поля.
9. Узел катушек приемника по п. 8, включающий:
систему отслеживания ориентации катушки приемника для отслеживания изменений в ориентации катушек приемника; и
контроллер, принимающий сигналы, представляющие отслеженные изменения в компонентах магнитного поля с катушек приемника и отслеженные изменения в ориентации от системы отслеживания ориентации катушки приемника, и корректирующий отслеженные изменения в компонентах магнитного поля, чтобы выдать сигнал, который скорректирован по шуму, вызываемому изменившейся ориентацией катушек приемника в статическом геомагнитном поле.
10. Узел катушек приемника по п. 9, отличающийся тем, что оси трех катушек приемника взаимно ортогональны.
11. Узел катушек приемника по п. 9, отличающийся тем, что система отслеживания ориентации включает трехосный феррозондовый магнитометр, имеющий три чувствительные оси, которые соответствуют трем осям катушек приемника, для измерения величины и направления статического геомагнитного поля относительно осей катушек приемника, причем контроллер объединяет сигналы, принятые с трех катушек приемника, в зависимости от сигналов измерений геомагнитного поля с феррозондового магнитометра, чтобы получить сигнал, соответствующий изменениям в компоненте магнитного поля, который параллелен геомагнитному полю.
12. Узел катушек приемника по п. 8, отличающийся тем, что наружная оболочка имеет номинально вертикальную протяженность, которая существенно меньше, чем ее горизонтальная протяженность, причем катушка приемника с воздушной центральной частью размещена в трубчатой наружной части, имеющей номинально вертикальную ось, а первая и вторая соленоидные катушки приемника включают многовитковые обмотки соленоида с ферромагнитными сердечниками, имеющими горизонтальную ось.
13. Узел катушек приемника по п. 12, отличающийся тем, что трубчатая наружная часть принимает форму многогранного или круглого контура, причем наружная оболочка имеет два перпендикулярных диаметра через контур в номинально горизонтальной плоскости, и первая и вторая соленоидные катушки приемника каждая расположена на соответствующем одном из перпендикулярных диаметров.
14. Узел катушек приемника по любому из пп. 8-13, отличающийся тем, что каждая из катушек приемника упруго подвешена на полужестком внутреннем элементе, который в свою очередь упруго подвешен в наружной оболочке.
15. Узел катушек приемника по п. 8, отличающийся тем, что изменения в компонентах магнитного поля, отслеживаемые катушками приемника, являются встречающимися в природе случайными флуктуациями магнитного поля.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7157914 В2, 02.01.2007 | |||
| ВЕРТОЛЕТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ | 2005 |
|
RU2358294C2 |
| US 20090284258 A1,l 19.11.2009 | |||

